Oppimistavoitteet. MAA-C2001 Ympäristötiedon keruu. Kinect Flash lidar Muita 3D-mittausinstrumentteja Sovelluksia
|
|
|
- Jutta Parviainen
- 7 vuotta sitten
- Katselukertoja:
Transkriptio

1 MAA-C2001 Ympäristötiedon keruu Luento 11, Muut mittausinstrumentit, 2017 Petri Rönnholm, Aalto-yliopisto 1 Oppimistavoitteet Kinect Flash lidar Muita 3D-mittausinstrumentteja Sovelluksia 2 1
 Valmistaja: PrimeSense (Microsoft lisenssöinyt teknologian) Kolmiointiperiaatteella toimiva etäisyyskamera 3 Kinect Etäisyysmittaus tapahtuu käyttämällä")
2 Kinect Kinect, Kinect for Xbox 360/windows, Asus Xtion Pro/Pro Live, PrimeSense SDK 5.0 (sensori sama, mutta kuoret erilaisia) Valmistaja: PrimeSense (Microsoft lisenssöinyt teknologian) Kolmiointiperiaatteella toimiva etäisyyskamera 3 Kinect Etäisyysmittaus tapahtuu käyttämällä laskennallista projektorikuvaa ja kohteen kautta heijastunutta valopisteistöä, joka näkyy läheiselle infrapunakameralle Projektori heijastaa kohteeseen strukturoitua valoa, jonka aallonpituus on 830 nm (kts. seuraavan kalvon kuva) Infrapunavalo toimii sisätiloissa, mutta auringonvalo peittää sen ja mittaus ei tällöin onnistu ulkotiloissa Valopisteet toistuvat 9-osassa siten, että yhden osan keskellä on kirkkaampi piste ja sen ympärillä on iso joukko himmeämpiä pisteitä Tekniikkaa kutsutaan myös nimellä RGB-D elated 4 2

 Pisteet ovat itse asiassa ellipsejä Ellipsin orientaatio ja koko riippuu etäisyydestä Pisteiden")
3 oft-kinect-the-anandtech-review/2 5 Kinect Sensori yhdistää kaksi menetelmää Depth from focus (etäisyys tarkennuksesta) Kolmiointi Depth from focus Astigmaattinen linssistö tuottaa eri etäisyyksille optimoituja pisteitä (eri kameravakio x- ja y-suunnassa) Pisteet ovat itse asiassa ellipsejä Ellipsin orientaatio ja koko riippuu etäisyydestä Pisteiden koko ja välinen etäisyys muuttuu etäisyyden mukaan (muistissa on vertaustaso, jossa pisteiden koko tiedetään) 6 3
4 Depth from focus 7 Freedman et al, PrimeSense patent application US 2010/ Kolmiointi Kinect toimii kolmiointiperiaatteella (projektori, kohde, kamera) 8 Kuva: 4
 Parallakseista saadaan etäisyyskuva 9 Kuva: http://www.ncbi.nlm.nih.")
5 Kolmiointi Laitteen muistissa on referenssikuva tietyllä etäisyydellä olevasta projektorin pisteistöstä Jos kohde ei olekaan referenssitason etäisyydellä, pisteet liikkuvat (vaakasuorasti kuvalla) Pisteiden liikkeet tunnistetaan kuvakorrelaatioalgoritmilla Tulokseksi saadaan parallaksikuva (disparity image) Parallakseista saadaan etäisyyskuva 9 Kuva: Kolmiointi Kuvasta löydetään suhteita yhdenmuotoisten kolmioiden avulla D Z0 Zk b Z d f 0 D Z k 10 5
6 3D pisteiden laskeminen Ratkaistaan jälkimmäisestä yhtälöstä D ja sijoitetaan ensimmäiseen D Z0 Zk b Z 0 d f D Z k Tulokseksi tulee etäisyys kohteeseen Z k Z k bfz0 Z d bf 0 Z0 Z0d 1 bf 11 3D pisteiden laskeminen Etäisyys referenssitasoon Z 0, infrapunakameran kameravakio f ja projektorin ja kuvan välinen etäisyys eli kanta b joudutaan selvittämään laitteen kalibroinnilla Lisäksi on selvitettävä infrapunakameran linssivirheet Käytännössä infrapunakuvista on poistettava linssivirheet ennen kuin lasketaan parallaksikuva X- ja Y-suunnat saadaan kohdilleen skaalaamalla kuvakoordinaatteja x k ja y k. Lisäksi kuvakoordinaatiston origon tulee olla kuvan pääpisteessä (x 0, y 0 ) Zk X k ( xk x0) f 12 Y k Z f k ( y k y 0 ) 6
7 Kolmioinnin teoreettinen tarkkuus Kolmioinnin tarkkuus heikkenee nopeasti etäisyyden funktiona Etäisyystarkkuutta voisi parantaa kasvattamalla kantaa b 13 Menna et al Kinect Resoluutiosta riippuen tuottaa kuvia välille (frame rate) 9-30 Hz RGB-kameran videokuvan resoluutio on 640x480 Kamera voisi ottaa kuvia resoluutiolla 1280x1024, mutta pienemmällä taajuudella 3D kuvan resoluutio on 640x480 3D kuvan etäisyystieto on kvantisoitu (pakattu) 11- bittiseksi, jolloin syvyysarvoja voi olla vain 2 11 =2048 kpl Käytännössä eroja saadaan välille [400, 1040], kun kohde sijaitsee etäisyyksillä [500 mm, 6000 mm] 14 7


8 Kinect Etäisyyskuva paljastaa etäisyyden kvantisoinnista johtuvan pyöristämisen Taso 75 cm päässä Taso 275 cm päässä 15 Menna et al RGB-väriarvojen liittäminen pistepilveen Laitteen RGB-kamera on kalibroitava ja sen linssivirheet korjattava Kamera on fyysisesti hieman sivussa infrapunakamerasta, joten RGB-kameran ulkoinen orientointi infrapunakameran koordinaatistossa on selvitettävä (keskinäinen orientointi)

9 Linssivirheiden korjaus Alla on esimerkki IR- ja RGB-kameroiden linssivirheistä 17 Kinect Laskenta tapahtuu itse laitteessa Mahdollistaa reaaliaikaisen Kokovartalon 3D liikkeenseuranta Käden liikkeiden tunnistus Kasvojen tunnistus äänentunnistus 18 9


10 Ihmisen asennon tunnistus 19 Ihmisen asennon tunnistus Laite tunnistaa yhtä aikaa useita pelaajia 20 10

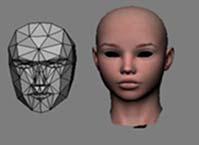
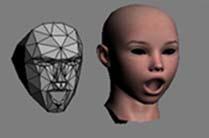

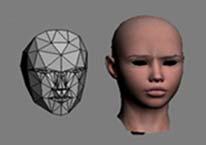
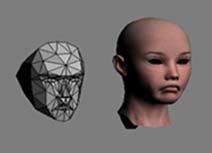
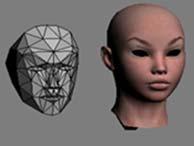
11 Ihmisen asennon tunnistus 20 avainpistettä ihmisestä 21 Kasvojen animointi Upper Lip Raiser Lip Corner Depressor Lip Stretcher Jaw Lowerer Brow Lowerer Outer Brow Raiser 22 11


12 Kinect sovelluksia Sisätilan mallinnus Kinect sovelluksia Käsiohjaus ja liikkeentunnistus



13 Kinect sovelluksia Vaatteiden virtuaalisovitus 25 Matterport Panoramakeilain, jonka sensoreina on Kinectejä Ohjelmisto rekisteröi 3D näkymät ja 2D kuvat toisiinsa Video: Showcase: 3-rs-of-matterport-3d-showcasewalkaround-tours-for-generalcontractors 26 13


 3D etäisyyskamera")


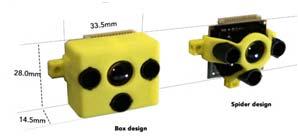
14 Muita kolmiointiin perustuvia 3D sensoreita Google Tango Orbbec Astra Intel SR300 Fotonic Q-Series + paljon muita 27 Kinect 2 3D-etäisyyskamera eli perustuu täysin eri teknologiaan kuin ensimmäisen sukupolven Kinect Time-of-flight (TOF) 3D etäisyyskamera (AKA 1080p) 30 fps 16:9 camera Pystyy seuraamaan 6 aktiivista pelaajaa yhtä aikaa Sormien ja pään liikkeen seuranta 1080p Skype-puhelut Puheentunnistus

 Distance")

15 Matriisipohjainen etäisyyskamera Time-of-flight 3D-etäisyyskamerat, flash lidar, ei sisällä liikkuvia osia Valonlähde valaisee koko kohteen moduloidulla valolla Vastaanottimen jokaisen sensorin pitää kyetä vastaanottamaan sekä taustan intensiteetin että lähetetyn moduloidun valon saapumisajan RF-modulated transmitter (20 MHz) Distance image 2D-detector and 2D RF-phase detector Laserkeilain vs. flash lidar 30 ence/graham-flash_lidar-mapps2014.pdf 15

 Microchannel Plate photomultiplier tubes (MCP-PMT) Nano electron injection")
16 Matriisipohjainen etäisyyskamera Toteutettavissa CCD/CMOS-kennoilla ja ledeillä Saapuneen moduloidun valon vaihe saadaan ristikorreloimalla alkuperäisen signaalin kanssa CCD/CMOS-kennon näytteistys synkronoidaan valon modulointitaajuuden kanssa Näytteistys toistetaan useita kertoja, jotta saadaan vähennettyä kohinaa 31 Sensorivaihtoehtoja Avalanche Photo Diode Focal Plane Array (APD-FPA) Microchannel Plate photomultiplier tubes (MCP-PMT) Nano electron injection 32 ence/graham-flash_lidar-mapps2014.pdf 16

, pp.")
17 Matriisipohjainen etäisyyskamera Jos pystytään rekisteröimään 4 havaintoa (A0, A1, A2, A3) moduloidun valon periodin aikana, signaali voidaan palauttaa kokonaiseksi kokonaisintensiteetti amplitudi vaihe Etäisyys saadaan f mod on modulaation taajuus 33 Lange, R. and Seitz, P., Solid-state time-of-flight range camera. IEEE Transactions on Quantum Electronics, 37 (3), pp





18 3D-etäisyyskamerat Toistaiseksi useimmissa laitteissa on heikko resoluutio, joten avauskulma on hyvin kapea pidemmillä etäisyyksillä Suurin osa laitteista mittaa enintään 10 metriin Osa laitteista kykenee mittaamaan usean kilometrin päähän Mittausnopeus tyypillisesti välillä 5-60 Hz 35 Kuva: Valmistajia on lukuisia Mesa Imaging, SwissRanger 4000 (SR4000) PMD Technologies, Microsoft (Kinect 2) Fotonic, TeraRanger, ASC, Jne


19 Ajoneuvoavustin Flash lidar soveltuu mainiosti liikkuvan autoon havainnoimaan ympäristössä tapahtuvia liikkeitä ja tunnistamaan esteitä 37 ence/graham-flash_lidar-mapps2014.pdf Kohteen havaitseminen sumussa
 Reaaliaikaiset sovellukset https://www.youtube.com/watch?")
20 Telakoitumisavustin, TigerEye 3D 39 Merkitys tulevaisuudessa Flash lidar tuottaa valokuvamaisesti 3D näkymiä, mikä mahdollistaa liikkuvien kohteiden mittauksen Osin päällekkäisten 3D-kuvien käytön sisäisen laadun varmistukseen Jopa 3D kartoituksen ilman GPS/IMU-laitteita (päällekkäisten 3D-kuvien keskinäinen orientointi) Reaaliaikaiset sovellukset




21 Kolmiointiin perustuva edullinen 3D skanneri 41 SLAM - simultaneous localization and mapping Ongelma: halutaan navigoida, mutta ei tunneta ympäristöä Ratkaisu: Kartoitetaan ympäristö reaaliaikaisesti ja sitten navigoidaan SLAM-laitteisto tarvitsee siis kartoitusinstrumentin Stereokamerat, RGB-D, flash lidar, laserkeilain, kaikuluotain 42 21
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää
 Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
Luento 5: Stereoskooppinen mittaaminen
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
Maastokartta pistepilvenä Harri Kaartinen, Maanmittauspäivät
 Maastokartta pistepilvenä 22.3.2018 Harri Kaartinen, Maanmittauspäivät 2018 1 Sisältö Pistepilvi aineistolähteenä Aineiston keruu Aineistojen yhdistäminen ja käsittely Sovellukset 22.3.2018 Harri Kaartinen,
Maastokartta pistepilvenä 22.3.2018 Harri Kaartinen, Maanmittauspäivät 2018 1 Sisältö Pistepilvi aineistolähteenä Aineiston keruu Aineistojen yhdistäminen ja käsittely Sovellukset 22.3.2018 Harri Kaartinen,
Luento 8: Kolmiointi AIHEITA. Kolmiointi. Maa-57.301 Fotogrammetrian yleiskurssi. Luento-ohjelma 1 2 3 4 5 6 7 8 9 10
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Tiedonkeruun miljoonat pisteet
 Tiedonkeruun miljoonat pisteet Arttu Julin, Rakennetun ympäristön mittauksen ja mallinnuksen instituutti, Aalto-yliopisto. arttu.julin@aalto.fi Kaupunkimallit 2017 seminaari 8.11.2017 Rakennetun ympäristön
Tiedonkeruun miljoonat pisteet Arttu Julin, Rakennetun ympäristön mittauksen ja mallinnuksen instituutti, Aalto-yliopisto. arttu.julin@aalto.fi Kaupunkimallit 2017 seminaari 8.11.2017 Rakennetun ympäristön
Luento 10: Optinen 3-D mittaus ja laserkeilaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS AI-TUTKIJAN URANÄKYMIÄ AJATUSTENLUKUA COMPUTER VISION SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA MUUTTUJIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA
JOHDATUS TEKOÄLYYN TEEMU ROOS AI-TUTKIJAN URANÄKYMIÄ AJATUSTENLUKUA COMPUTER VISION SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA MUUTTUJIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA
Koulutus 1: 3D-laserskannaus
 Tervetuloa! 1 ProDigiOUs -hanke Koulutus 1: 3D-laserskannaus Kalle Tammi Kevät 2018 Intro Tämä koulutus ja sen materiaali on tuotettu ESRrahoitteisessa alueellisessa ProDigiOUs projektissa. 3 YouTube video
Tervetuloa! 1 ProDigiOUs -hanke Koulutus 1: 3D-laserskannaus Kalle Tammi Kevät 2018 Intro Tämä koulutus ja sen materiaali on tuotettu ESRrahoitteisessa alueellisessa ProDigiOUs projektissa. 3 YouTube video
Fotogrammetrian termistöä
 Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Luento 6: Stereo- ja jonomallin muodostaminen
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
3D-kuvauksen tekniikat ja sovelluskohteet. Mikael Hornborg
 3D-kuvauksen tekniikat ja sovelluskohteet Mikael Hornborg Luennon sisältö 1. Optiset koordinaattimittauskoneet 2. 3D skannerit 3. Sovelluskohteet Johdanto Optiset mittaustekniikat perustuvat valoon ja
3D-kuvauksen tekniikat ja sovelluskohteet Mikael Hornborg Luennon sisältö 1. Optiset koordinaattimittauskoneet 2. 3D skannerit 3. Sovelluskohteet Johdanto Optiset mittaustekniikat perustuvat valoon ja
ENY-C2005 Geoinformation in Environmental Modeling Luento 2b: Laserkeilaus
 1 ENY-C2005 Geoinformation in Environmental Modeling Luento 2b: Laserkeilaus Petri Rönnholm Aalto-yliopisto 2 Oppimistavoitteet Ymmärtää laserkeilauksen sovelluksia Ymmärtää laserkeilauksen perusteet Tuntea
1 ENY-C2005 Geoinformation in Environmental Modeling Luento 2b: Laserkeilaus Petri Rönnholm Aalto-yliopisto 2 Oppimistavoitteet Ymmärtää laserkeilauksen sovelluksia Ymmärtää laserkeilauksen perusteet Tuntea
Luento 2 Stereokuvan laskeminen. 2008 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 6: 3-D koordinaatit
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Luento 4 Georeferointi
 Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
Metsäkoneiden sensoritekniikka kehittyy. Heikki Hyyti, Aalto-yliopisto
 Metsäkoneiden sensoritekniikka kehittyy, Metsäkoneiden sensoritekniikka kehittyy Miksi uutta sensoritekniikkaa? Tarkka paikkatieto metsässä Metsäkoneen ja puomin asennon mittaus Konenäkö Laserkeilaus Tietolähteiden
Metsäkoneiden sensoritekniikka kehittyy, Metsäkoneiden sensoritekniikka kehittyy Miksi uutta sensoritekniikkaa? Tarkka paikkatieto metsässä Metsäkoneen ja puomin asennon mittaus Konenäkö Laserkeilaus Tietolähteiden
Maa-57.260. Kameran kalibrointi. TKK/Fotogrammetria/PP
 Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Luento 4 Georeferointi Maa Fotogrammetrian perusteet 1
 Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Artec TDSM 3D Skanneri 3D mallit ja animaatiot nopeasti, myös liikkuvasta kohteesta
 Artec TDSM 3D Skanneri 3D mallit ja animaatiot nopeasti, myös liikkuvasta kohteesta Miksi ostaa? 1. Aito on-line skannaus, jopa 15 kuva/s (frames/second) 2. Ei tarvetta referenssitarroille tai muille paikoitus
Artec TDSM 3D Skanneri 3D mallit ja animaatiot nopeasti, myös liikkuvasta kohteesta Miksi ostaa? 1. Aito on-line skannaus, jopa 15 kuva/s (frames/second) 2. Ei tarvetta referenssitarroille tai muille paikoitus
Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Spektri- ja signaalianalysaattorit
 Spektri- ja signaalianalysaattorit Pyyhkäisevät spektrianalysaattorit Suora pyyhkäisevä Superheterodyne Reaaliaika-analysaattorit Suora analoginen analysaattori FFT-spektrianalysaattori DFT FFT Analysaattoreiden
Spektri- ja signaalianalysaattorit Pyyhkäisevät spektrianalysaattorit Suora pyyhkäisevä Superheterodyne Reaaliaika-analysaattorit Suora analoginen analysaattori FFT-spektrianalysaattori DFT FFT Analysaattoreiden
Luento 7: Fotogrammetrinen mittausprosessi
 7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
Luento 11: Stereomallin ulkoinen orientointi
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Luento 7 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Malleja ja menetelmiä geometriseen tietokonenäköön
 Malleja ja menetelmiä geometriseen tietokonenäköön Juho Kannala 7.5.2010 Johdanto Tietokonenäkö on ala, joka kehittää menetelmiä automaattiseen kuvien sisällön tulkintaan Tietokonenäkö on ajankohtainen
Malleja ja menetelmiä geometriseen tietokonenäköön Juho Kannala 7.5.2010 Johdanto Tietokonenäkö on ala, joka kehittää menetelmiä automaattiseen kuvien sisällön tulkintaan Tietokonenäkö on ajankohtainen
Luento Fotogrammetrian perusteet. Henrik Haggrén
 Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
2 Pistejoukko koordinaatistossa
 Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
LABORATORIOTYÖ 3 VAIHELUKITTU VAHVISTIN
 LABORATORIOTYÖ 3 VAIHELUKITTU VAHVISTIN Päivitetty: 23/01/2009 TP 3-1 3. VAIHELUKITTU VAHVISTIN Työn tavoitteet Työn tavoitteena on oppia vaihelukitun vahvistimen toimintaperiaate ja käyttömahdollisuudet
LABORATORIOTYÖ 3 VAIHELUKITTU VAHVISTIN Päivitetty: 23/01/2009 TP 3-1 3. VAIHELUKITTU VAHVISTIN Työn tavoitteet Työn tavoitteena on oppia vaihelukitun vahvistimen toimintaperiaate ja käyttömahdollisuudet
Luento 3: Kuvahavainnot
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Stereopaikannusjärjestelmän tarkkuus (3 op)
") Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT
 Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT Laura Ruotsalainen Paikkatietokeskus FGI, MML Matinen rahoitus: 77 531 INTACT tarve Taistelijan tilannetietoisuus rakennetuissa ympäristöissä,
Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT Laura Ruotsalainen Paikkatietokeskus FGI, MML Matinen rahoitus: 77 531 INTACT tarve Taistelijan tilannetietoisuus rakennetuissa ympäristöissä,
Basler teollisuuskameroiden ja Pylon-ohjelman käytön aloittaminen
 Basler teollisuuskameroiden ja Pylon-ohjelman käytön aloittaminen Ajureiden ja ohjelman asentaminen Lataa ensimmäiseksi Pylon-sovellus Baslerin sivuilta osoitteesta http://www.baslerweb.com/pylon Käynnistä
Basler teollisuuskameroiden ja Pylon-ohjelman käytön aloittaminen Ajureiden ja ohjelman asentaminen Lataa ensimmäiseksi Pylon-sovellus Baslerin sivuilta osoitteesta http://www.baslerweb.com/pylon Käynnistä
www.terrasolid.com Kaupunkimallit
 www.terrasolid.com Kaupunkimallit Arttu Soininen 03.12.2015 Vuonna 1993 Isoja askeleita 1993-2015 Laserkeilaus helikopterilla/lentokoneella Laserkeilaus paikaltaan GPS+IMU yleistynyt kaikkeen ilmasta mittaukseen
www.terrasolid.com Kaupunkimallit Arttu Soininen 03.12.2015 Vuonna 1993 Isoja askeleita 1993-2015 Laserkeilaus helikopterilla/lentokoneella Laserkeilaus paikaltaan GPS+IMU yleistynyt kaikkeen ilmasta mittaukseen
Liiketoimintaa metsäkonetiedosta?
 Liiketoimintaa metsäkonetiedosta? Matti Rahikka 21/11/2018 1 Agenda Esittäjä Internet of Things Esineiden internet Kuvantunnistus Dronen käyttömahdollisuudet @450-laajakaista - Liikkuva tukiasema Kuka
Liiketoimintaa metsäkonetiedosta? Matti Rahikka 21/11/2018 1 Agenda Esittäjä Internet of Things Esineiden internet Kuvantunnistus Dronen käyttömahdollisuudet @450-laajakaista - Liikkuva tukiasema Kuka
Ultraäänen kuvausartefaktat. UÄ-kuvantamisen perusoletukset. Outi Pelkonen OYS, Radiologian Klinikka 29.4.2005
 Ultraäänen kuvausartefaktat Outi Pelkonen OYS, Radiologian Klinikka 29.4.2005 kaikissa radiologisissa kuvissa on artefaktoja UÄ:ssä artefaktat ovat kaikuja, jotka näkyvät kuvassa, mutta eivät vastaa sijainniltaan
Ultraäänen kuvausartefaktat Outi Pelkonen OYS, Radiologian Klinikka 29.4.2005 kaikissa radiologisissa kuvissa on artefaktoja UÄ:ssä artefaktat ovat kaikuja, jotka näkyvät kuvassa, mutta eivät vastaa sijainniltaan
Teledyne Optech Titan -monikanavalaser ja sen sovellusmahdollisuudet
 Teledyne Optech Titan -monikanavalaser ja sen sovellusmahdollisuudet Jan Biström TerraTec Oy TerraTec-ryhmä Emoyhtiö norjalainen TerraTec AS Liikevaihto 2015 noin 13 miljoonaa euroa ja noin 90 työntekijää
Teledyne Optech Titan -monikanavalaser ja sen sovellusmahdollisuudet Jan Biström TerraTec Oy TerraTec-ryhmä Emoyhtiö norjalainen TerraTec AS Liikevaihto 2015 noin 13 miljoonaa euroa ja noin 90 työntekijää
Referenssit ja näytteenotto VLBI -interferometriassa
 Referenssit ja näytteenotto VLBI -interferometriassa Jan Wagner, jwagner@kurp.hut.fi Metsähovin radiotutkimusasema / TKK Eri taajuuksilla sama kohde nähdään eri tavalla ts. uutta tietoa pinta-ala D tarkkuustyötä
Referenssit ja näytteenotto VLBI -interferometriassa Jan Wagner, jwagner@kurp.hut.fi Metsähovin radiotutkimusasema / TKK Eri taajuuksilla sama kohde nähdään eri tavalla ts. uutta tietoa pinta-ala D tarkkuustyötä
Radioastronomian käsitteitä
 Radioastronomian käsitteitä allonpituusalue ~ 100 m - 1 mm MHz 300 GHz Leveä aallonpituusalue: erilaisia antenneja, monenlaista tekniikkaa Ei (suoraan) kuvia Signaali yleensä
Radioastronomian käsitteitä allonpituusalue ~ 100 m - 1 mm MHz 300 GHz Leveä aallonpituusalue: erilaisia antenneja, monenlaista tekniikkaa Ei (suoraan) kuvia Signaali yleensä
Radioamatöörikurssi 2016
 Radioamatöörikurssi 2016 Modulaatiot Radioiden toiminta 8.11.2016 Tatu Peltola, OH2EAT 1 / 18 Modulaatiot Erilaisia tapoja lähettää tietoa radioaalloilla Esim. puhetta ei yleensä laiteta antenniin sellaisenaan
Radioamatöörikurssi 2016 Modulaatiot Radioiden toiminta 8.11.2016 Tatu Peltola, OH2EAT 1 / 18 Modulaatiot Erilaisia tapoja lähettää tietoa radioaalloilla Esim. puhetta ei yleensä laiteta antenniin sellaisenaan
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys10 Kevät 010 Jukka Maalampi LUENTO 7 Harmonisen värähdysliikkeen energia Jousen potentiaalienergia on U k( x ) missä k on jousivakio ja Dx on poikkeama tasapainosta. Valitaan
Mekaniikan jatkokurssi Fys10 Kevät 010 Jukka Maalampi LUENTO 7 Harmonisen värähdysliikkeen energia Jousen potentiaalienergia on U k( x ) missä k on jousivakio ja Dx on poikkeama tasapainosta. Valitaan
Luento 9 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
SPS ZOOM 300. 3D Laserkeilain
 SPS ZOOM 300 3D Laserkeilain SPS ZOOM 300 3D Laserkeilain 3D laserkeilain on laite joka mittaa ja kerää tarkkaa tietoa ympäristön kohteista. Mitattuja pistepilviä voidaan sen jälkeen käyttää suunnittelussa
SPS ZOOM 300 3D Laserkeilain SPS ZOOM 300 3D Laserkeilain 3D laserkeilain on laite joka mittaa ja kerää tarkkaa tietoa ympäristön kohteista. Mitattuja pistepilviä voidaan sen jälkeen käyttää suunnittelussa
83950 Tietoliikennetekniikan työkurssi Monitorointivastaanottimen perusmittaukset
 TAMPEREEN TEKNILLINEN KORKEAKOULU 83950 Tietoliikennetekniikan työkurssi Monitorointivastaanottimen perusmittaukset email: ari.asp@tut.fi Huone: TG 212 puh 3115 3811 1. ESISELOSTUS Vastaanottimen yleisiä
TAMPEREEN TEKNILLINEN KORKEAKOULU 83950 Tietoliikennetekniikan työkurssi Monitorointivastaanottimen perusmittaukset email: ari.asp@tut.fi Huone: TG 212 puh 3115 3811 1. ESISELOSTUS Vastaanottimen yleisiä
Lue käyttöohje huolellisesti läpi ennen tuotteen käyttöönottoa.
 KÄYTTÖOHJE 1 (5) VAROITUKSET Lue käyttöohje huolellisesti läpi ennen tuotteen käyttöönottoa. HUOMIO! Laite ei sovellu alle 3-vuotiaille lapsille. Sisältää pieniä osia - Tukehtumisvaara. Pidä huoli ettei
KÄYTTÖOHJE 1 (5) VAROITUKSET Lue käyttöohje huolellisesti läpi ennen tuotteen käyttöönottoa. HUOMIO! Laite ei sovellu alle 3-vuotiaille lapsille. Sisältää pieniä osia - Tukehtumisvaara. Pidä huoli ettei
Tasoittamattomat fotonikeilat, dosimetrian haasteet ja käytännöt. Sädehoitofyysikoiden 31. neuvottelupäivät 5.-6.6.2014 Billnäsin ruukki, Raasepori
 Tasoittamattomat fotonikeilat, dosimetrian haasteet ja käytännöt. Sädehoitofyysikoiden 31. neuvottelupäivät 5.-6.6.2014 Billnäsin ruukki, Raasepori petri.sipilä@stuk.fi Haasteet FFF keilassa? FFF keila
Tasoittamattomat fotonikeilat, dosimetrian haasteet ja käytännöt. Sädehoitofyysikoiden 31. neuvottelupäivät 5.-6.6.2014 Billnäsin ruukki, Raasepori petri.sipilä@stuk.fi Haasteet FFF keilassa? FFF keila
Jakso 6: Värähdysliikkeet Tämän jakson tehtävät on näytettävä viimeistään torstaina
 Jakso 6: Värähdysliikkeet Tämän jakson tehtävät on näytettävä viimeistään torstaina 31.5.2012. T 6.1 (pakollinen): Massa on kiinnitetty pystysuoran jouseen. Massaa poikkeutetaan niin, että se alkaa värähdellä.
Jakso 6: Värähdysliikkeet Tämän jakson tehtävät on näytettävä viimeistään torstaina 31.5.2012. T 6.1 (pakollinen): Massa on kiinnitetty pystysuoran jouseen. Massaa poikkeutetaan niin, että se alkaa värähdellä.
Tosi elävä virtuaalimalli Mika Karaila Tutkimuspäällikkö Valmet Automation
 Tosi elävä virtuaalimalli 27.4.2017 Mika Karaila Tutkimuspäällikkö Valmet Automation Agenda Teollinen internet Uudet teknologiat: VR & MR Soveltaminen käytännössä Yhteenveto & demo 2 Teollinen internet
Tosi elävä virtuaalimalli 27.4.2017 Mika Karaila Tutkimuspäällikkö Valmet Automation Agenda Teollinen internet Uudet teknologiat: VR & MR Soveltaminen käytännössä Yhteenveto & demo 2 Teollinen internet
LAURI VIRTANEN TASAISEN PINNAN TUNNISTUS ETÄISYYSKUVASTA
 LAURI VIRTANEN TASAISEN PINNAN TUNNISTUS ETÄISYYSKUVASTA Kandidaatintyö Tarkastaja: Yliopistonlehtori Heikki Huttunen i TIIVISTELMÄ TAMPEREEN TEKNILLINEN YLIOPISTO Tietotekniikan koulutusohjelma VIRTANEN,
LAURI VIRTANEN TASAISEN PINNAN TUNNISTUS ETÄISYYSKUVASTA Kandidaatintyö Tarkastaja: Yliopistonlehtori Heikki Huttunen i TIIVISTELMÄ TAMPEREEN TEKNILLINEN YLIOPISTO Tietotekniikan koulutusohjelma VIRTANEN,
Mittausprojekti 2017
 Mittausprojekti 2017 Hajonta et al Tulos vs. mittaus? Tilastolliset tunnusluvut pitää laskea (keskiarvot ja hajonnat). Tuloksia esitetään, ei sitä kuinka paljon ryhmä teki töitä mitatessaan. Yksittäisiä
Mittausprojekti 2017 Hajonta et al Tulos vs. mittaus? Tilastolliset tunnusluvut pitää laskea (keskiarvot ja hajonnat). Tuloksia esitetään, ei sitä kuinka paljon ryhmä teki töitä mitatessaan. Yksittäisiä
Ohjelmistoradio tehtävät 4. P1: Ekvalisointi ja demodulaatio. OFDM-symbolien generoiminen
 Ohjelmistoradio tehtävät 4 P: Ekvalisointi ja demodulaatio Tässä tehtävässä dekoodata OFDM data joka on sijotetty synknonontisignaalin lälkeen. Synkronointisignaali on sama kuin edellisessä laskutehtävässä.
Ohjelmistoradio tehtävät 4 P: Ekvalisointi ja demodulaatio Tässä tehtävässä dekoodata OFDM data joka on sijotetty synknonontisignaalin lälkeen. Synkronointisignaali on sama kuin edellisessä laskutehtävässä.
11. Astrometria, ultravioletti, lähiinfrapuna
 11. Astrometria, ultravioletti, lähiinfrapuna 1. Astrometria 2. Meridiaanikone 3. Suhteellinen astrometria 4. Katalogit 5. Astrometriasatelliitit 6. Ultravioletti 7. Lähi-infrapuna 13.1 Astrometria Taivaan
11. Astrometria, ultravioletti, lähiinfrapuna 1. Astrometria 2. Meridiaanikone 3. Suhteellinen astrometria 4. Katalogit 5. Astrometriasatelliitit 6. Ultravioletti 7. Lähi-infrapuna 13.1 Astrometria Taivaan
Perusmittalaitteet 2. Yleismittari Taajuuslaskuri
 Mittaustekniikan perusteet / luento 4 Perusmittalaitteet 2 Digitaalinen yleismittari Yleisimmin sähkötekniikassa käytetty mittalaite. Yleismittari aajuuslaskuri Huomaa mittareiden toisistaan poikkeaat
Mittaustekniikan perusteet / luento 4 Perusmittalaitteet 2 Digitaalinen yleismittari Yleisimmin sähkötekniikassa käytetty mittalaite. Yleismittari aajuuslaskuri Huomaa mittareiden toisistaan poikkeaat
Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006
 Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006 Satelliittimittauksen tulevaisuus GPS:n modernisointi, L2C, L5 GALILEO GLONASS GNSS GPS:n modernisointi L2C uusi siviilikoodi L5 uusi taajuus Block
Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006 Satelliittimittauksen tulevaisuus GPS:n modernisointi, L2C, L5 GALILEO GLONASS GNSS GPS:n modernisointi L2C uusi siviilikoodi L5 uusi taajuus Block
Hans Pihlajamäki Fysiikan kotitutkimus
 Fysiikan kotitutkimus Fysiikan 1. kurssi, Rauman Lyseon lukio Johdanto 1. Saaristo- ja rannikkonavigoinnissa on tärkeää kyetä havainnoimaan väyliä osoittavia väylämerkkejä. Pimeän aikaan liikuttaessa tehokkaalla
Fysiikan kotitutkimus Fysiikan 1. kurssi, Rauman Lyseon lukio Johdanto 1. Saaristo- ja rannikkonavigoinnissa on tärkeää kyetä havainnoimaan väyliä osoittavia väylämerkkejä. Pimeän aikaan liikuttaessa tehokkaalla
Trimble S7: SureScan, pistepilvet ja VISION-kuvantaminen tee näin Kari Tenhunen Geotrim Kä K y ä tt t äj t äpäivä v t ä
 Trimble S7: SureScan, pistepilvet ja VISION-kuvantaminen tee näin Kari Tenhunen Sisältö Työn perustaminen ja siihen liittyvät asetukset VISION-teknologian hyödyntämien Prismanhaku Kuvien ottaminen lisätietona
Trimble S7: SureScan, pistepilvet ja VISION-kuvantaminen tee näin Kari Tenhunen Sisältö Työn perustaminen ja siihen liittyvät asetukset VISION-teknologian hyödyntämien Prismanhaku Kuvien ottaminen lisätietona
YLEINEN AALTOLIIKEOPPI
 YLEINEN AALTOLIIKEOPPI KEVÄT 2017 1 Saana-Maija Huttula (saana.huttula@oulu.fi) Maanantai Tiistai Keskiviikko Torstai Perjantai Vk 8 Luento 1 Mekaaniset aallot 1 Luento 2 Mekaaniset aallot 2 Ääni ja kuuleminen
YLEINEN AALTOLIIKEOPPI KEVÄT 2017 1 Saana-Maija Huttula (saana.huttula@oulu.fi) Maanantai Tiistai Keskiviikko Torstai Perjantai Vk 8 Luento 1 Mekaaniset aallot 1 Luento 2 Mekaaniset aallot 2 Ääni ja kuuleminen
Luento 7: Kuvan ulkoinen orientointi
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Korkean resoluution ja suuren kuva-alueen SAR
 Korkean resoluution ja suuren kuva-alueen SAR MATINE tutkimusseminaari 17.11.2016 Risto Vehmas, Juha Jylhä, Minna Väilä, Ari Visa Tampereen teknillinen yliopisto Signaalinkäsittelyn laitos Hankkeelle myönnetty
Korkean resoluution ja suuren kuva-alueen SAR MATINE tutkimusseminaari 17.11.2016 Risto Vehmas, Juha Jylhä, Minna Väilä, Ari Visa Tampereen teknillinen yliopisto Signaalinkäsittelyn laitos Hankkeelle myönnetty
Luento 2: Kuvakoordinaattien mittaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
Virheen kasautumislaki
 Virheen kasautumislaki Yleensä tutkittava suure f saadaan välillisesti mitattavista parametreistä. Tällöin kokonaisvirhe f määräytyy mitattujen parametrien virheiden perusteella virheen kasautumislain
Virheen kasautumislaki Yleensä tutkittava suure f saadaan välillisesti mitattavista parametreistä. Tällöin kokonaisvirhe f määräytyy mitattujen parametrien virheiden perusteella virheen kasautumislain
Satelliittipaikannus
 Kolme maailmalaajuista järjestelmää 1. GPS (USAn puolustusministeriö) Täydessä laajuudessaan toiminnassa v. 1994. http://www.navcen.uscg.gov/gps/default.htm 2. GLONASS (Venäjän hallitus) Ilmeisesti 11
Kolme maailmalaajuista järjestelmää 1. GPS (USAn puolustusministeriö) Täydessä laajuudessaan toiminnassa v. 1994. http://www.navcen.uscg.gov/gps/default.htm 2. GLONASS (Venäjän hallitus) Ilmeisesti 11
MAA-C2001 Ympäristötiedon keruu
 MAA-C2001 Ympäristötiedon keruu Luento 1b Petri Rönnholm, Aalto-yliopisto 1 Laserkeilauksen, fotogrammetrian ja kaukokartoituksen harjoituksista Laserkeilausharjoitus Tarkempi aikataulu julkaistaan lähiaikoina
MAA-C2001 Ympäristötiedon keruu Luento 1b Petri Rönnholm, Aalto-yliopisto 1 Laserkeilauksen, fotogrammetrian ja kaukokartoituksen harjoituksista Laserkeilausharjoitus Tarkempi aikataulu julkaistaan lähiaikoina
Laitteita - Yleismittari
 Laitteita - Yleismittari Yleistyökalu mittauksissa Yleensä digitaalisia Mittaustoimintoja Jännite (AC ja DC) Virta (AC ja DC) Vastus Diodi Lämpötila Transistori Kapasitanssi Induktanssi Taajuus 1 Yleismittarin
Laitteita - Yleismittari Yleistyökalu mittauksissa Yleensä digitaalisia Mittaustoimintoja Jännite (AC ja DC) Virta (AC ja DC) Vastus Diodi Lämpötila Transistori Kapasitanssi Induktanssi Taajuus 1 Yleismittarin
Dell esitteli maailman pienimmän 13-tuumaisen kannettavan
 Lehdistötiedote 8.1.2014 Dell esitteli maailman pienimmän 13-tuumaisen kannettavan Julkistettu Dell XPS 13 on maailman pienin[1] 13-tuumainen kannettava, jossa on lähes reunaton näyttö ja jopa 15 tuntia
Lehdistötiedote 8.1.2014 Dell esitteli maailman pienimmän 13-tuumaisen kannettavan Julkistettu Dell XPS 13 on maailman pienin[1] 13-tuumainen kannettava, jossa on lähes reunaton näyttö ja jopa 15 tuntia
Verkkodatalehti. WTT190L-A3532 PowerProx VALOKENNOT
 Verkkodatalehti WTT9L-A2 PowerProx WTT9L-A2 PowerProx A B C D E F Esimerkkikuva Tilaustiedot Tyyppi Tuotenumero WTT9L-A2 6626 Muita laiteversioita ja varusteita www.sick.com/powerprox H I J K L M N O P
Verkkodatalehti WTT9L-A2 PowerProx WTT9L-A2 PowerProx A B C D E F Esimerkkikuva Tilaustiedot Tyyppi Tuotenumero WTT9L-A2 6626 Muita laiteversioita ja varusteita www.sick.com/powerprox H I J K L M N O P
Kuvanlaadunparantaminen. Mikko Nuutinen 21.3.2013
 Kuvanlaadunparantaminen Mikko Nuutinen 21.3.2013 Luennon sisältö Termistöä Kuvanentisöinti Terävyys unsharp masking Kohina non-local means Linssivääristymän korjaus Kuvanlaadunehostaminen Kontrasti Auto-levels
Kuvanlaadunparantaminen Mikko Nuutinen 21.3.2013 Luennon sisältö Termistöä Kuvanentisöinti Terävyys unsharp masking Kohina non-local means Linssivääristymän korjaus Kuvanlaadunehostaminen Kontrasti Auto-levels
Luento 4 Kolmiulotteiset kuvat. fotogrammetriaan ja kaukokartoitukseen
 Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Aito on-line 3D Skanneri 3D mallit ja animaatiot nopeasti, myös liikkuvasta kohteesta
 Aito on-line 3D Skanneri 3D mallit ja animaatiot nopeasti, myös liikkuvasta kohteesta Miksi ostaa? 1. On-line skannaus, jopa 15 kuva/s (frames/second) 2. Ei tarvetta referenssitarroille tai muille paikoitus
Aito on-line 3D Skanneri 3D mallit ja animaatiot nopeasti, myös liikkuvasta kohteesta Miksi ostaa? 1. On-line skannaus, jopa 15 kuva/s (frames/second) 2. Ei tarvetta referenssitarroille tai muille paikoitus
RG-58U 4,5 db/30m. Spektrianalysaattori. 0,5m. 60m
 1. Johtuvia häiiöitä mitataan LISN:n avulla EN55022-standadin mukaisessa johtuvan häiiön mittauksessa. a. 20 MHz taajuudella laite tuottaa 1.5 mv suuuista häiiösignaalia. Läpäiseekö laite standadin B-luokan
1. Johtuvia häiiöitä mitataan LISN:n avulla EN55022-standadin mukaisessa johtuvan häiiön mittauksessa. a. 20 MHz taajuudella laite tuottaa 1.5 mv suuuista häiiösignaalia. Läpäiseekö laite standadin B-luokan
Eve Parviainen Microsoft Kinectin tarkkuuden arviointi
 Eve Parviainen Microsoft Kinectin tarkkuuden arviointi Kandidaatintyö Tarkastaja: Heikki Huttunen I TIIVISTELMÄ TAMPEREEN TEKNILLINEN YLIOPISTO Signaalinkäsittelyn ja tietoliikennetekniikan koulutusohjelma
Eve Parviainen Microsoft Kinectin tarkkuuden arviointi Kandidaatintyö Tarkastaja: Heikki Huttunen I TIIVISTELMÄ TAMPEREEN TEKNILLINEN YLIOPISTO Signaalinkäsittelyn ja tietoliikennetekniikan koulutusohjelma
FYSP105/2 VAIHTOVIRTAKOMPONENTIT. 1 Johdanto. 2 Teoreettista taustaa
 FYSP105/2 VAIHTOVIRTAKOMPONENTIT Työn tavoitteita o Havainnollistaa vaihtovirtapiirien toimintaa o Syventää ymmärtämystä aiheeseen liittyvästä fysiikasta 1 Johdanto Tasavirta oli 1900 luvun alussa kilpaileva
FYSP105/2 VAIHTOVIRTAKOMPONENTIT Työn tavoitteita o Havainnollistaa vaihtovirtapiirien toimintaa o Syventää ymmärtämystä aiheeseen liittyvästä fysiikasta 1 Johdanto Tasavirta oli 1900 luvun alussa kilpaileva
Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta
 Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta Sanna Kaasalainen Kaukokartoituksen ja Fotogrammetrian Osasto Ilmastonmuutos ja ääriarvot 13.9.2012 Ympäristön Aktiivinen
Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta Sanna Kaasalainen Kaukokartoituksen ja Fotogrammetrian Osasto Ilmastonmuutos ja ääriarvot 13.9.2012 Ympäristön Aktiivinen
HARJOITUS 7 SEISOVAT AALLOT TAVOITE
 SEISOVAT AALLOT TAVOITE Tässä harjoituksessa opit käyttämään rakolinjaa. Toteat myös seisovan aallon kuvion kolmella eri kuormalla: oikosuljetulla, sovittamattomalla ja sovitetulla kuormalla. Tämän lisäksi
SEISOVAT AALLOT TAVOITE Tässä harjoituksessa opit käyttämään rakolinjaa. Toteat myös seisovan aallon kuvion kolmella eri kuormalla: oikosuljetulla, sovittamattomalla ja sovitetulla kuormalla. Tämän lisäksi
ELEC-C5070 Elektroniikkapaja (5 op)
") (5 op) Luento 5 A/D- ja D/A-muunnokset ja niiden vaikutus signaaleihin Signaalin A/D-muunnos Analogia-digitaalimuunnin (A/D-muunnin) muuttaa analogisen signaalin digitaaliseen muotoon, joka voidaan lukea
(5 op) Luento 5 A/D- ja D/A-muunnokset ja niiden vaikutus signaaleihin Signaalin A/D-muunnos Analogia-digitaalimuunnin (A/D-muunnin) muuttaa analogisen signaalin digitaaliseen muotoon, joka voidaan lukea
Agenda. Johdanto Ominaispiirteitä Kokonaisjärjestelmän määrittely Eri alojen edustajien roolit Sulautetut järjestelmät ja sulautettu ohjelmointi
 1. Luento: Sulautetut Järjestelmät Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Ominaispiirteitä Kokonaisjärjestelmän määrittely Eri alojen edustajien roolit Sulautetut järjestelmät ja sulautettu
1. Luento: Sulautetut Järjestelmät Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Ominaispiirteitä Kokonaisjärjestelmän määrittely Eri alojen edustajien roolit Sulautetut järjestelmät ja sulautettu
Vanhankaupunginkosken ultraäänikuvaukset Simsonar Oy Pertti Paakkolanvaara
 Vanhankaupunginkosken ultraäänikuvaukset 15.7. 14.11.2014 Simsonar Oy Pertti Paakkolanvaara Avaintulokset 2500 2000 Ylös vaellus pituusluokittain: 1500 1000 500 0 35-45 cm 45-60 cm 60-70 cm >70 cm 120
Vanhankaupunginkosken ultraäänikuvaukset 15.7. 14.11.2014 Simsonar Oy Pertti Paakkolanvaara Avaintulokset 2500 2000 Ylös vaellus pituusluokittain: 1500 1000 500 0 35-45 cm 45-60 cm 60-70 cm >70 cm 120
Yhtälön oikealla puolella on säteen neliö, joten r. = 5 eli r = ± 5. Koska säde on positiivinen, niin r = 5.
 Tekijä Pitkä matematiikka 5 7..017 31 Kirjoitetaan yhtälö keskipistemuotoon ( x x ) + ( y y ) = r. 0 0 a) ( x 4) + ( y 1) = 49 Yhtälön vasemmalta puolelta nähdään, että x 0 = 4 ja y 0 = 1, joten ympyrän
Tekijä Pitkä matematiikka 5 7..017 31 Kirjoitetaan yhtälö keskipistemuotoon ( x x ) + ( y y ) = r. 0 0 a) ( x 4) + ( y 1) = 49 Yhtälön vasemmalta puolelta nähdään, että x 0 = 4 ja y 0 = 1, joten ympyrän
Uusia sovelluksia kalojen havainnointiin Case Montta. Pertti Paakkolanvaara Simsonar Oy. Kuva Maanmittaus laitos 2.2.
 Uusia sovelluksia kalojen havainnointiin Case Montta Pertti Paakkolanvaara Simsonar Oy Kuva Maanmittaus laitos 2.2.2018 CC-lisenssi Simsonar Oy Oululainen laitevalmistaja, perustettu 2008 Heikki Oukka
Uusia sovelluksia kalojen havainnointiin Case Montta Pertti Paakkolanvaara Simsonar Oy Kuva Maanmittaus laitos 2.2.2018 CC-lisenssi Simsonar Oy Oululainen laitevalmistaja, perustettu 2008 Heikki Oukka
Mobiilikartoitusdatan prosessointi ja hyödyntäminen
 Mobiilikartoitusdatan prosessointi ja hyödyntäminen Alkuprosessointi - Vaiheet 1. Ajoradan jälkilaskenta 2. Havaintodatan korjaus 3. RGB-värjäys 4. Tukipisteiden käyttö Ajoradan jälkilaskenta Korjataan
Mobiilikartoitusdatan prosessointi ja hyödyntäminen Alkuprosessointi - Vaiheet 1. Ajoradan jälkilaskenta 2. Havaintodatan korjaus 3. RGB-värjäys 4. Tukipisteiden käyttö Ajoradan jälkilaskenta Korjataan
Kapasitiivinen ja induktiivinen kytkeytyminen
 Kapasitiivinen ja induktiivinen kytkeytyminen EMC - Kaapelointi ja kytkeytyminen Kaapelointi merkittävä EMC-ominaisuuksien kannalta yleensä pituudeltaan suurin elektroniikan osa > toimii helposti antennina
Kapasitiivinen ja induktiivinen kytkeytyminen EMC - Kaapelointi ja kytkeytyminen Kaapelointi merkittävä EMC-ominaisuuksien kannalta yleensä pituudeltaan suurin elektroniikan osa > toimii helposti antennina
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Todellinen 3D-ohjauksensuuntauslaite
 geoliner 680 ja geoliner 780 Huipputarkka Kaikki ajoneuvojen säätöarvot tulevat suoraan autovalmistajilta ja ovat tarkkoja ja luotettavia. Kehittynyt kamerajärjestelmä on erittäin tarkka ja takaa luotettavan
geoliner 680 ja geoliner 780 Huipputarkka Kaikki ajoneuvojen säätöarvot tulevat suoraan autovalmistajilta ja ovat tarkkoja ja luotettavia. Kehittynyt kamerajärjestelmä on erittäin tarkka ja takaa luotettavan
Infraäänimittaukset. DI Antti Aunio, Aunio Group Oy
 Infraäänimittaukset DI Antti Aunio, Aunio Group Oy antti.aunio@aunio.fi Mitä infraääni on? Matalataajuista ilmanpaineen vaihtelua Taajuusalue < 20 Hz Ihmisen kuuloalue on tyypillisesti 20-20 000 Hz Osa
Infraäänimittaukset DI Antti Aunio, Aunio Group Oy antti.aunio@aunio.fi Mitä infraääni on? Matalataajuista ilmanpaineen vaihtelua Taajuusalue < 20 Hz Ihmisen kuuloalue on tyypillisesti 20-20 000 Hz Osa
Rataverkon kunnon ja liikkuvan kaluston akustinen valvonta kuituoptiikan avulla
 Rataverkon kunnon ja liikkuvan kaluston akustinen valvonta kuituoptiikan avulla Lassi Matikainen Matias Tuohino 23.1.2018 Esityksen sisältö 1. Aiheesta tehdyn diplomityön esittely 2. Kuituoptisten sensoreiden
Rataverkon kunnon ja liikkuvan kaluston akustinen valvonta kuituoptiikan avulla Lassi Matikainen Matias Tuohino 23.1.2018 Esityksen sisältö 1. Aiheesta tehdyn diplomityön esittely 2. Kuituoptisten sensoreiden
Pitkän kantaman aktiivinen hyperspektraalinen laserkeilaus
 Pitkän kantaman aktiivinen hyperspektraalinen laserkeilaus MATINE:n Tutkimusseminaari, 18.11.2015 Helsinki Sanna Kaasalainen, Olli Nevalainen, Teemu Hakala Paikkatietokeskus Sisällys Taustaa Multispektraaliset
Pitkän kantaman aktiivinen hyperspektraalinen laserkeilaus MATINE:n Tutkimusseminaari, 18.11.2015 Helsinki Sanna Kaasalainen, Olli Nevalainen, Teemu Hakala Paikkatietokeskus Sisällys Taustaa Multispektraaliset
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
Esitystavat 4K ja 8K. Mitä esitystavat 4K ja 8K ovat, milloin tulevat, vai tulevatko ja miksi. Muutama olettamus miksi. Koonnut Pekka Mielityinen 1
 Mitä esitystavat 4K ja 8K ovat, milloin tulevat, vai tulevatko ja miksi. Muutama olettamus miksi. Koonnut Pekka Mielityinen 1 Teräväpiirtotekniikan tarkkuus on 1080 juovaa ja 1920 pistettä juovalla Elämme
Mitä esitystavat 4K ja 8K ovat, milloin tulevat, vai tulevatko ja miksi. Muutama olettamus miksi. Koonnut Pekka Mielityinen 1 Teräväpiirtotekniikan tarkkuus on 1080 juovaa ja 1920 pistettä juovalla Elämme
Johdanto tieto- viestintäteknologian käyttöön: Äänitystekniikka. Vfo135 ja Vfp124 Martti Vainio
 Johdanto tieto- viestintäteknologian käyttöön: Äänitystekniikka Vfo135 ja Vfp124 Martti Vainio Akustiikka Äänityksen tarkoitus on taltioida paras mahdo!inen signaali! Tärkeimpinä kolme akustista muuttujaa:
Johdanto tieto- viestintäteknologian käyttöön: Äänitystekniikka Vfo135 ja Vfp124 Martti Vainio Akustiikka Äänityksen tarkoitus on taltioida paras mahdo!inen signaali! Tärkeimpinä kolme akustista muuttujaa:
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys102 Syksy 2009 Jukka Maalampi LUENTO 12 Aallot kahdessa ja kolmessa ulottuvuudessa Toistaiseksi on tarkasteltu aaltoja, jotka etenevät yhteen suuntaan. Yleisempiä tapauksia ovat
Mekaniikan jatkokurssi Fys102 Syksy 2009 Jukka Maalampi LUENTO 12 Aallot kahdessa ja kolmessa ulottuvuudessa Toistaiseksi on tarkasteltu aaltoja, jotka etenevät yhteen suuntaan. Yleisempiä tapauksia ovat
LIIKKEENVAHVISTUSKUVAUS
 LIIKKEENVAHVISTUSKUVAUS feat. 3D-skannaus Teemu Ritvanen 050 564 8640 teemu.ritvanen@mltfinland.fi MLT Machine & Laser Technology Oy ESTABLISHED 1988 33 EMPLOYEES Provides products and services for demanding
LIIKKEENVAHVISTUSKUVAUS feat. 3D-skannaus Teemu Ritvanen 050 564 8640 teemu.ritvanen@mltfinland.fi MLT Machine & Laser Technology Oy ESTABLISHED 1988 33 EMPLOYEES Provides products and services for demanding
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Monisensoripaikannusta kaikissa ympäristöissä
 Monisensoripaikannusta kaikissa ympäristöissä Ratkaisuja Luonnosta - Lynetin tutkimuspäivä 4.10.2016 Sanna Kaasalainen Laura Ruotsalainen FGI:n Navigoinnin ja paikannuksen osasto Henkilöstö: 18 Tutkimus
Monisensoripaikannusta kaikissa ympäristöissä Ratkaisuja Luonnosta - Lynetin tutkimuspäivä 4.10.2016 Sanna Kaasalainen Laura Ruotsalainen FGI:n Navigoinnin ja paikannuksen osasto Henkilöstö: 18 Tutkimus
Visibiliteetti ja kohteen kirkkausjakauma
 Visibiliteetti ja kohteen kirkkausjakauma Interferoteriassa havaittava suure on visibiliteetti V (u, v) = P n (x, y)i ν (x, y)e i2π(ux+vy) dxdy kohde Taivaannapa m Koordinaatisto: u ja v: B/λ:n projektioita
Visibiliteetti ja kohteen kirkkausjakauma Interferoteriassa havaittava suure on visibiliteetti V (u, v) = P n (x, y)i ν (x, y)e i2π(ux+vy) dxdy kohde Taivaannapa m Koordinaatisto: u ja v: B/λ:n projektioita
Valaisukurssi. TT-Kamerat, kevät 2010 Jari Huilla. Lisenssi: Creative Commons Nimeä-Epäkaupallinen-Tarttuva 1.0 Suomi
 Valaisukurssi TT-Kamerat, kevät 2010 Jari Huilla Lisenssi: Creative Commons Nimeä-Epäkaupallinen-Tarttuva 1.0 Suomi Aikataulusta 12.4.: Salamavalaisun perusasiat ja yhden salaman käyttö potrettivalaisussa
Valaisukurssi TT-Kamerat, kevät 2010 Jari Huilla Lisenssi: Creative Commons Nimeä-Epäkaupallinen-Tarttuva 1.0 Suomi Aikataulusta 12.4.: Salamavalaisun perusasiat ja yhden salaman käyttö potrettivalaisussa