Arto Salminen,
|
|
|
- Sami Parviainen
- 9 vuotta sitten
- Katselukertoja:
Transkriptio
1 8. Luento: Laitteiston ohjaaminen Arto Salminen,

2 Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen

3 Johdanto Tavoitteena: tunnistaa ja ymmärtää säätämiseen liittyviä ongelmia, saada perustiedot yksinkertaisista säätömenetelmistä Säätäminen = mitattavan arvon saattaminen asetusarvoa vastaavaksi Esimerkiksi: lämpötila, moottorin nopeus, nesteen taso Säätöalgoritmien tavoitteena tehokkuus, nopeus ja tarkkuus

4 Säätämisen historiaa Nicholas Minorsky: Directional stability of automatically steered bodies (1922) New Mexico sotalaivan automaattinen ohjausjärjestelmä Laivan kallistuminen heikensi laivatykkien tarkkuutta (S. Bennet: Nicolas Minorsky and the Automatic Steering of Ships)

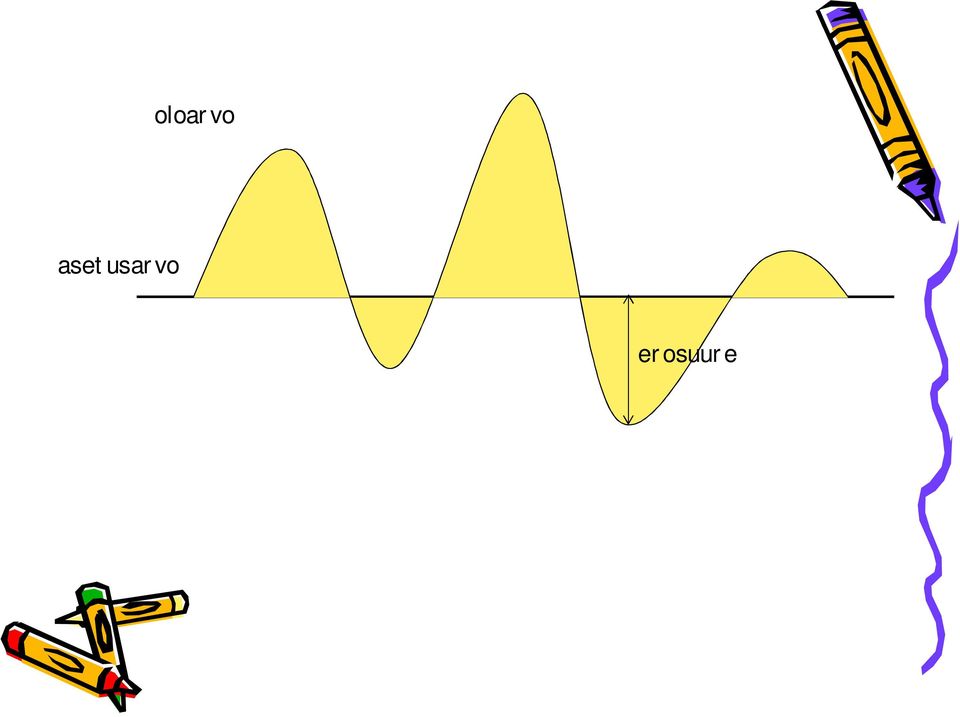
5 Termejä Häiriö Asetusarvo Erosuure (e) Ohjausarvo (u) Säädettävä suure Säätäjä Prosessi Takaisinkytkentä Mittausanturi Oloarvo Askelvaste:

6 oloarvo asetusarvo erosuure
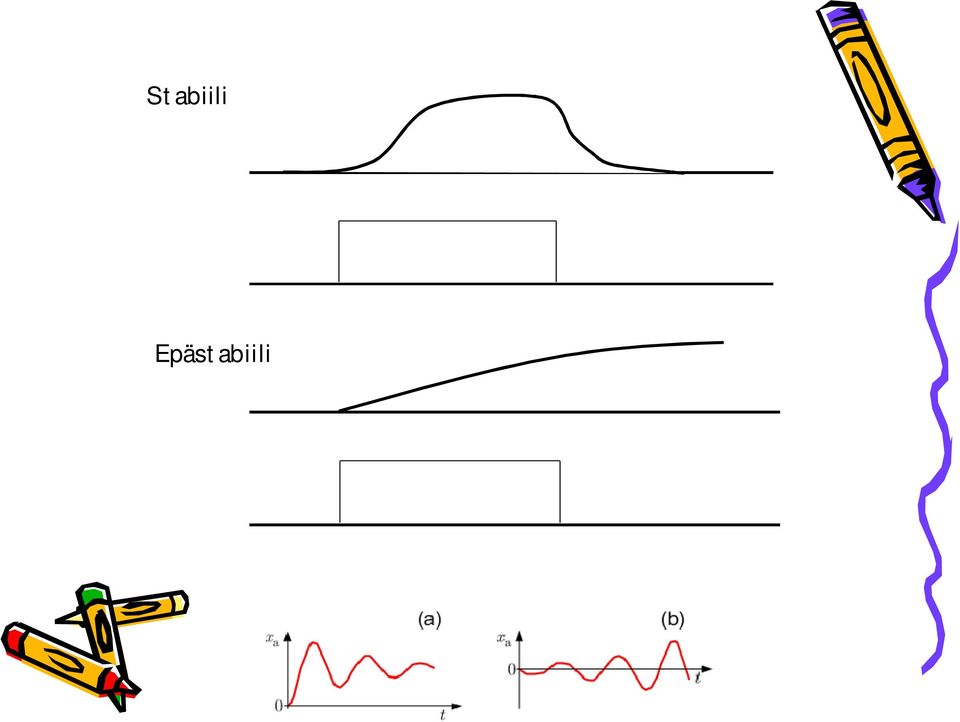
7 Stabiili prosessi Prosesseista Jos asetusarvo ja häiriöt pysyvät samana, prosessi asettuu luonnolliseen tasapainotilaan Esimerkiksi auton vakionopeudensäätö: jos moottoriin syötetty polttoainemäärä on vakio, auto kulkee vakionopeudella, kunhan ulkoiset tekijät kuten tuuli tai mäet eivät vaikuta Epästabiili, eli integroiva prosessi Prosessi ei asetu tasapainotilaan, vaan ajautuu rakenteelliseen ylä- tai alarajaan ilman säätöä Värähtelevä prosessi Värähtely voi johtua itse prosessin lisäksi myös huonosti viritetystä säätimestä, toimilaitevioista tai muista häiriöistä

8 Stabiili Epästabiili
9 Aikavakio ja viive Prosessin aikavakio osoittaa nopeutta, jolla prosessi reagoi ohjausarvojen muutokseen Viive, eli kuollut aika, tarkoittaa asetusarvon ja oloarvon muutoksen välillä kuluvaa aikaa

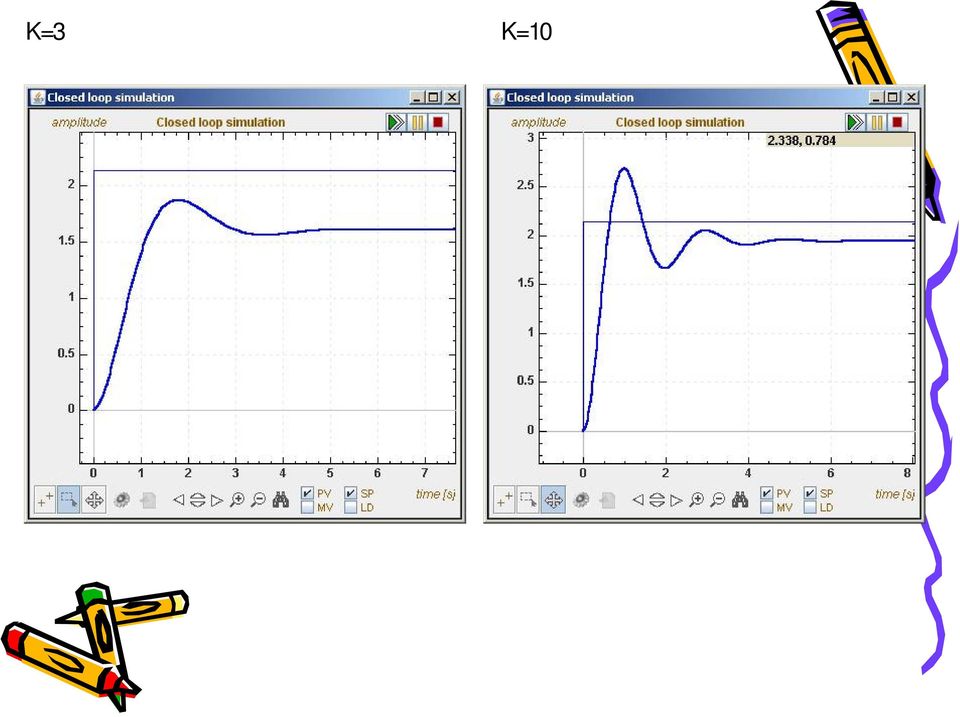
10 P-säätäjä u = K*e + M Ohjausarvo on suoraan verrannollinen eroarvoon P-säätäjä jättää asentovirheen Jos kerrointa K kasvatetaan liikaa, järjestelmä voi värähdellä Säätäjän ohjaus on usein rajoitettu tietylle välille Koodia: ero = asetusarvo oloarvo; u = p_kerroin * ero + p_skaalaus; ohjaus = mid (alaraja, u, ylaraja);

11 K=3 K=10
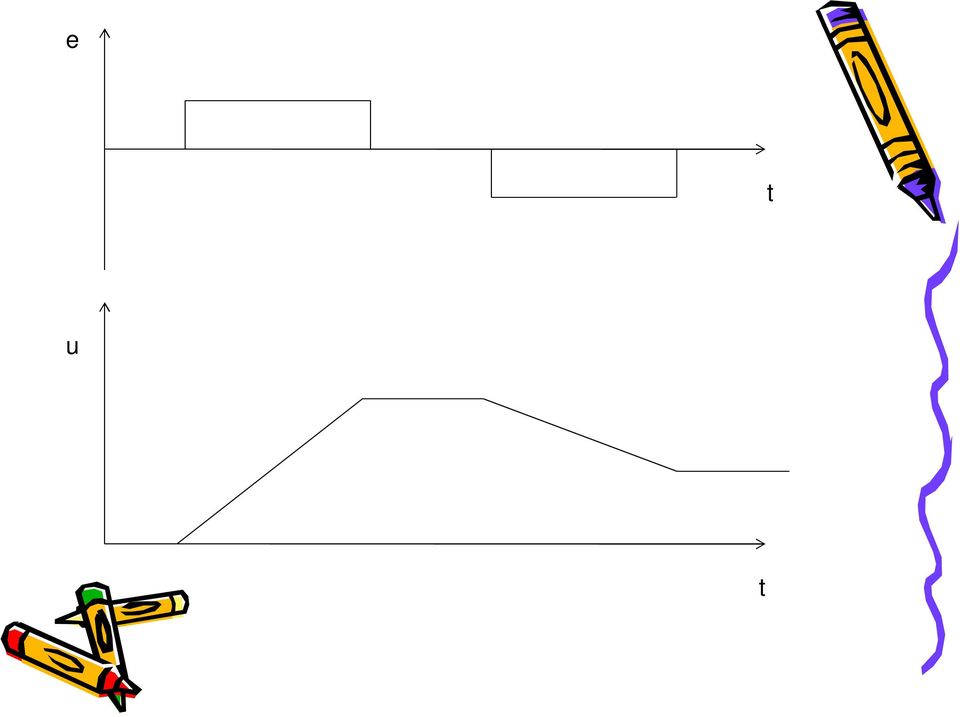
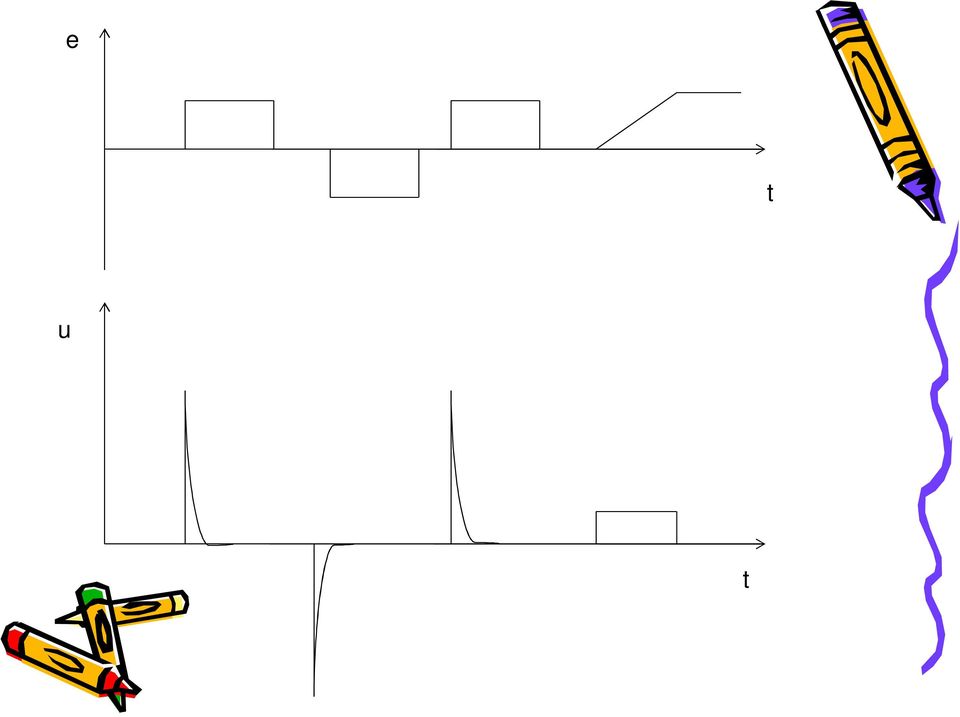
12 I-säätäjä u = K * average(e(1) e(k)) Säätimen ulostulo muuttuu eroarvoon verrannollisella nopeudella Ei reagoi pieniin häiriöihin Ei asentovirhettä Hidas Voi saturoitua toiminta-alueen rajalla, kun ohjaus ei riitä korjaamaan tilannetta (Windup). Ratkaisu: lisätään anti-windup toiminto, joka esimerkiksi estää integroinnin jatkumisen prosessin saturaatiotilanteessa

13 e t u t
14 Saturoituminen -> järjestelmä menettää ohjattavuutensa kunnes tilanne purkautuu

15 Antiwindup Mahdollisia strategioita Integroinnin lopettaminen saturaatiotilanteessa Integraalitermin rajoittaminen raja-arvojen sisälle Integroinnin lopettaminen saturaatiotilanteessa, jos eroarvolla ja asetusarvolla on sama merkki (u*e > 0) Yleensä integrointia ei lopeta suoraan, vaan sen arvoa vähennetään jonkin ajan kuluessa Kyllästymisen havaitsemiseksi tarvitaan ylimääräinen takaisinkytkentä

16 D-säätäjä u = K * ( e(n) e(n-1) ) Säätimen ulostulo on verrannollinen eroarvon muutosnopeuteen Säätö reagoi nopeasti Pitää liikettä yllä -> ylittää asetusarvon ja värähtelee Herkkä kohinalle Liitetään aina P tai PI-säätäjään

17 e t u t
18
19 PI-säätäjä P-säätäjän nopeus, I-säätäjän tarkkuus Ei asentovirhettä

20
21 PD-säätäjä Nopea, ennustaa asetusarvon muutosta Värähtelee herkästi Herkkä kohinalle Jättää asentovirheen
22
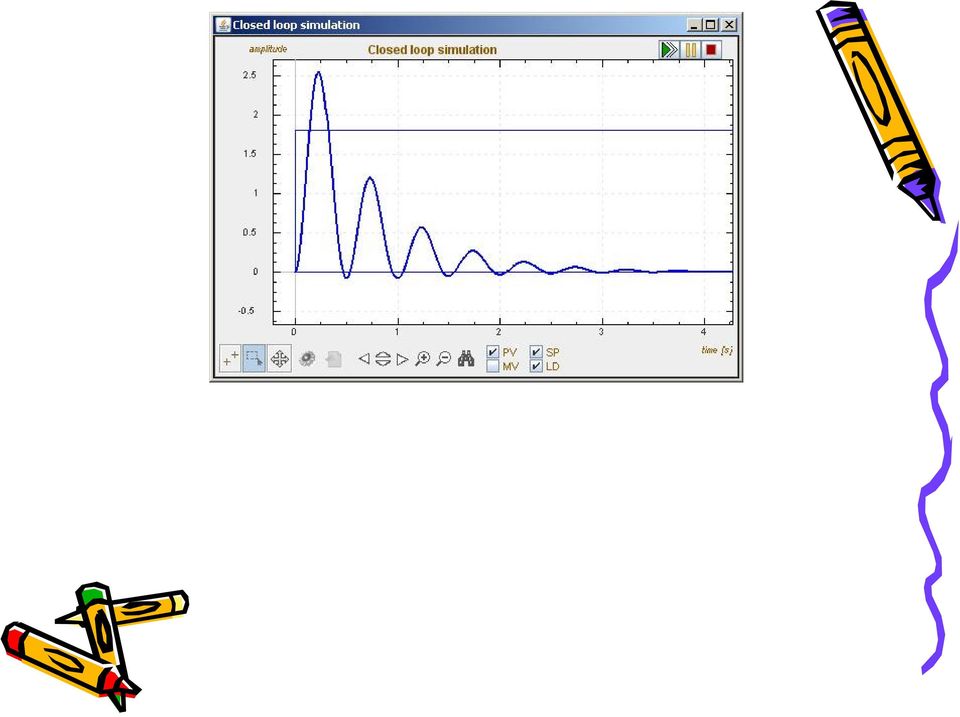
23 PID-säätäjä Reagoi nopeasti, mutta ei värähtele niin herkästi Yleissäätäjä P osa huolehtii perussäädöstä D osa tuo nopeutta I osa vaimentaa värähtelytaipumusta Ei asentovirhettä
24 PID-säätäjän rakenne Ideaalinen, sarjamuotoinen tai rinnakkaismuotoinen Jos mitään ei mainita, kyseessä on yleensä ideaalimuotoinen säädin Säädinrakenteella on merkitystä, jos viritysparametrit kopioidaan säätimeltä toiselle
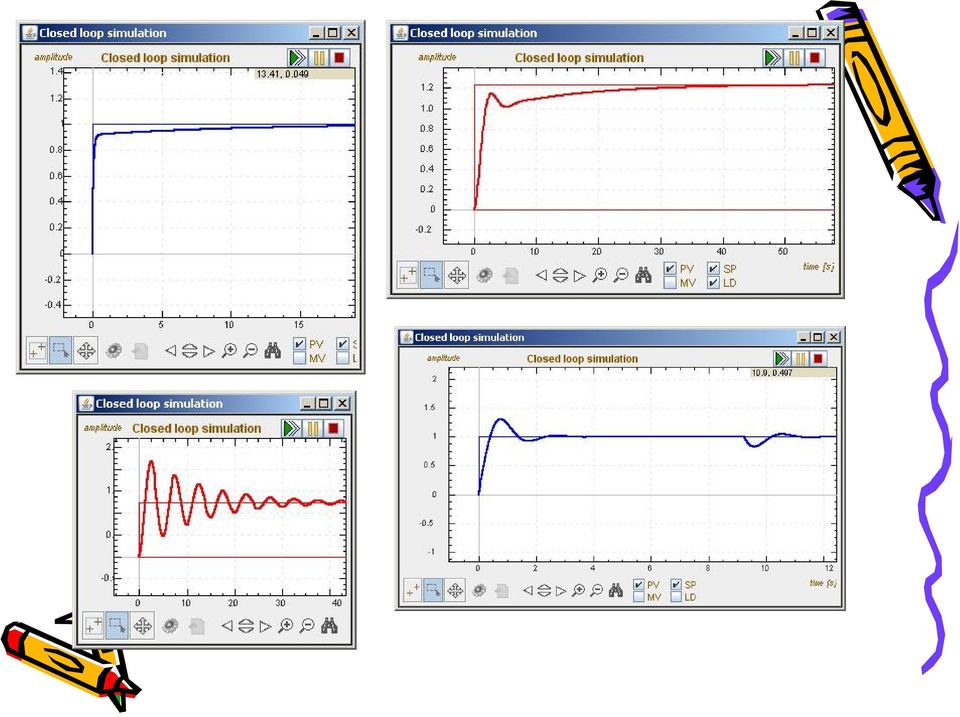
25 Säätäjän virittämisestä Säätäjän virittäminen yritys ja erehdys - menetelmän avulla muuttamalla P, I ja D- osien kertoimia D- ja P-termit aiheuttavat värähtelyä/ylitystä I-termi hävittää asentovirheen, mutta voi aiheuttaa säätäjän saturoitumisen Ziegler-Nichols ja Cohen-Coon ovat eräitä klassisia viritysmenetelmiä
26 Mittaamisesta Mittaussignaalia joudutaan usein suodattamaan Häiriöt Kiinnostava taajuuskaista Mitta-anturi on toisinaan kalibroitava Kalibrointi saatetaan tehdä huollon yhteydessä tai automaattisesti laitteen ollessa käytössä
27 Yhteenveto P-, I-, D-, PI-, PD- ja PID-säätimet valitaan käyttötarkoituksensa mukaan ja viritetään toimimaan optimaalisella, mutta turvallisella tavalla. Mitta-anturien kalibrointi on usein tarpeen valmistustoleranssien ja kulumisen vaikutuksen poistamiseksi Järjestelmän turvallisuus on syytä ottaa aina huomioon
Agenda. Johdanto Säätäjiä. Mittaaminen. P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen
 8. Luento: Laitteiston ohjaaminen Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
8. Luento: Laitteiston ohjaaminen Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
1 PID-taajuusvastesuunnittelun esimerkki
 Enso Ikonen, Oulun yliopisto, systeemitekniikan laboratorio 2/23 Säätöjärjestelmien suunnittelu 23 PID-taajuusvastesuunnittelun esimerkki Tehtävänä on suunnitella säätö prosessille ( ) = = ( +)( 2 + )
Enso Ikonen, Oulun yliopisto, systeemitekniikan laboratorio 2/23 Säätöjärjestelmien suunnittelu 23 PID-taajuusvastesuunnittelun esimerkki Tehtävänä on suunnitella säätö prosessille ( ) = = ( +)( 2 + )
Yleinen malliprediktiivinen säädin. Funktiolohko Siemens PLC. SoftControl Oy
 Yleinen malliprediktiivinen säädin Funktiolohko Siemens PLC SoftControl Oy 1.0 Malliprediktiivinen Säädin... 3 1.1 Yleistä...3 1.2 Sovellus...3 1.3 Kuvaus...4 1.4 Muuttujat...5 1.5 Säätimen viritys...6
Yleinen malliprediktiivinen säädin Funktiolohko Siemens PLC SoftControl Oy 1.0 Malliprediktiivinen Säädin... 3 1.1 Yleistä...3 1.2 Sovellus...3 1.3 Kuvaus...4 1.4 Muuttujat...5 1.5 Säätimen viritys...6
Numeeriset menetelmät
 Numeeriset menetelmät Luento 1 Ti 6.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 1 Ti 6.9.2011 p. 1/28 p. 1/28 Numeriikan termejä Simulointi: Reaalimaailman ilmiöiden jäljitteleminen (yleensä)
Numeeriset menetelmät Luento 1 Ti 6.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 1 Ti 6.9.2011 p. 1/28 p. 1/28 Numeriikan termejä Simulointi: Reaalimaailman ilmiöiden jäljitteleminen (yleensä)
OHJ-4301 Sulautettu Ohjelmointi
 OHJ-4301 Sulautettu Ohjelmointi (http://www.cs.tut.fi/~sulo/) 5op, to 12-14, TB 109 Arto Salminen, arto.salminen@tut.fi Läpäisyvaatimukset Hyväksytysti suoritetut: Tentti Harjoitustyöt Harjoitustyöt 3
OHJ-4301 Sulautettu Ohjelmointi (http://www.cs.tut.fi/~sulo/) 5op, to 12-14, TB 109 Arto Salminen, arto.salminen@tut.fi Läpäisyvaatimukset Hyväksytysti suoritetut: Tentti Harjoitustyöt Harjoitustyöt 3
Dynamiikan hallinta Lähde: Zölzer. Digital audio signal processing. Wiley & Sons, 2008. Zölzer (ed.) DAFX Digital Audio Effects. Wiley & Sons, 2002.
 DAFX Digital Audio Effects. Wiley & Sons, 2002.") Dynamiikan hallinta Lähde: Zölzer. Digital audio signal processing. Wiley & Sons, 2008. Zölzer (ed. DAFX Digital Audio Effects. Wiley & Sons, 2002. Sisältö:! Johdanto!! Ajallinen käyttäytyminen! oteutus!
Dynamiikan hallinta Lähde: Zölzer. Digital audio signal processing. Wiley & Sons, 2008. Zölzer (ed. DAFX Digital Audio Effects. Wiley & Sons, 2002. Sisältö:! Johdanto!! Ajallinen käyttäytyminen! oteutus!
Harjoitus 6: Simulink - Säätöteoria. Syksy 2006. Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1
 Harjoitus 6: Simulink - Säätöteoria Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen säätötekniikkaan Takaisinkytkennän
Harjoitus 6: Simulink - Säätöteoria Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen säätötekniikkaan Takaisinkytkennän
Yleistä. 08.10.07 Sulautetut järjestelmät 1
 Yleistä Luennot tiistaisin 8-10, TB111, I periodi ei harjoituksia harjoitustyö (auto) II periodilla harjoitustyön esittely I periodin lopussa erikseen ilmoitettavana aikana 08.10.07 Sulautetut järjestelmät
Yleistä Luennot tiistaisin 8-10, TB111, I periodi ei harjoituksia harjoitustyö (auto) II periodilla harjoitustyön esittely I periodin lopussa erikseen ilmoitettavana aikana 08.10.07 Sulautetut järjestelmät
SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS),
,") SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS), 5.2.2019 Tentin arvosteluperusteita: o Kurssin alku on osin kertausta SäAn ja prosessidynamiikkakursseista, jotka oletetaan
SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS), 5.2.2019 Tentin arvosteluperusteita: o Kurssin alku on osin kertausta SäAn ja prosessidynamiikkakursseista, jotka oletetaan
Muuntavat analogisen signaalin digitaaliseksi Vertaa sisääntulevaa signaalia referenssijännitteeseen Sarja- tai rinnakkaismuotoinen Tyypilliset
 Muuntavat analogisen signaalin digitaaliseksi Vertaa sisääntulevaa signaalia referenssijännitteeseen Sarja- tai rinnakkaismuotoinen Tyypilliset valintakriteerit resoluutio ja nopeus Yleisimmät A/D-muunnintyypit:
Muuntavat analogisen signaalin digitaaliseksi Vertaa sisääntulevaa signaalia referenssijännitteeseen Sarja- tai rinnakkaismuotoinen Tyypilliset valintakriteerit resoluutio ja nopeus Yleisimmät A/D-muunnintyypit:
Luento 8. Suodattimien käyttötarkoitus
 Luento 8 Lineaarinen suodatus Ideaaliset alipäästö, ylipäästö ja kaistanpäästösuodattimet Käytännölliset suodattimet 8..006 Suodattimien käyttötarkoitus Signaalikaistan ulkopuolisen kohinan ja häiriöiden
Luento 8 Lineaarinen suodatus Ideaaliset alipäästö, ylipäästö ja kaistanpäästösuodattimet Käytännölliset suodattimet 8..006 Suodattimien käyttötarkoitus Signaalikaistan ulkopuolisen kohinan ja häiriöiden
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Systeemitekniikan laboratorio Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Systeemitekniikan laboratorio Jan 2019
A/D-muuntimia. Flash ADC
 A/D-muuntimia A/D-muuntimen valintakriteerit: - bittien lukumäärä instrumentointi 6 16 audio/video/kommunikointi/ym. 16 18 erikoissovellukset 20 22 - Tarvittava nopeus hidas > 100 μs (
A/D-muuntimia A/D-muuntimen valintakriteerit: - bittien lukumäärä instrumentointi 6 16 audio/video/kommunikointi/ym. 16 18 erikoissovellukset 20 22 - Tarvittava nopeus hidas > 100 μs (
1 Tekniset tiedot: 2 Asennus: Asennus. Liitännät
 Viitteet 000067 - Fi ASENNUS ohje inteo Soliris Sensor RTS Soliris Sensor RTS on aurinko- & tuulianturi aurinko- & tuuliautomatiikalla varustettuihin Somfy Altus RTS- ja Orea RTS -moottoreihin. Moottorit
Viitteet 000067 - Fi ASENNUS ohje inteo Soliris Sensor RTS Soliris Sensor RTS on aurinko- & tuulianturi aurinko- & tuuliautomatiikalla varustettuihin Somfy Altus RTS- ja Orea RTS -moottoreihin. Moottorit
ILOX SATAVA LIESIKUPU >> TEKNINEN ESITE
 ILOX SATAVA LIESIKUPU >> TEKNINEN ESITE 2 ILOX SATAVA INTEGROITUVA LIUKUKUPU KAIKKIIN RAKENNUSTYYPPEIHIN Ominaisuudet Elektroninen ulosvedettävä kupu Toimintaa ohjataan liukuosaa liikuttamalla sekä liukuosan
ILOX SATAVA LIESIKUPU >> TEKNINEN ESITE 2 ILOX SATAVA INTEGROITUVA LIUKUKUPU KAIKKIIN RAKENNUSTYYPPEIHIN Ominaisuudet Elektroninen ulosvedettävä kupu Toimintaa ohjataan liukuosaa liikuttamalla sekä liukuosan
Säätötekniikkaa. Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla
 ohjaus, joka saa systeemin toimimaan halutulla tavalla") Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Laadunvalvonta ja käytönaikaiset hyväksyttävyysvaatimukset TT laitteille
 Laadunvalvonta ja käytönaikaiset hyväksyttävyysvaatimukset TT laitteille SÄTEILYTURVALLISUUS JA LAATU ISOTOOPPILÄÄKETIETEESSÄ 10.12.2015, Säätytalo, Helsinki Tarkastaja Elina Hallinen, STUK TT laitteen
Laadunvalvonta ja käytönaikaiset hyväksyttävyysvaatimukset TT laitteille SÄTEILYTURVALLISUUS JA LAATU ISOTOOPPILÄÄKETIETEESSÄ 10.12.2015, Säätytalo, Helsinki Tarkastaja Elina Hallinen, STUK TT laitteen
Numeeriset menetelmät
 Numeeriset menetelmät Luento 11 Ti 11.10.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 11 Ti 11.10.2011 p. 1/34 p. 1/34 Automaattiset integrointialgoritmit Numeerisen integroinnin tarkkuuteen
Numeeriset menetelmät Luento 11 Ti 11.10.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 11 Ti 11.10.2011 p. 1/34 p. 1/34 Automaattiset integrointialgoritmit Numeerisen integroinnin tarkkuuteen
Säätötekniikkaa. Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla
 ohjaus, joka saa systeemin toimimaan halutulla tavalla") Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Kon Hydraulijärjestelmät
 Kon-41.4040 Hydraulijärjestelmät Laboratorioharjoitus 2: Sähköhydraulisen järjestelmän säätö Jyri Juhala Jyrki Kajaste (Heikki Kauranne) Hydraulijärjestelmän venttiilin ohjausmenetelmät Ohjaus Kompensointi
Kon-41.4040 Hydraulijärjestelmät Laboratorioharjoitus 2: Sähköhydraulisen järjestelmän säätö Jyri Juhala Jyrki Kajaste (Heikki Kauranne) Hydraulijärjestelmän venttiilin ohjausmenetelmät Ohjaus Kompensointi
1. Lomakkeet löytyvät asiointiportaalista osoitteesta
 TOIMINTA-AVUSTUKSEN SÄHKÖINEN HAKU 1. Lomakkeet löytyvät asiointiportaalista osoitteesta http://asiointi.hel.fi Etusivulta valitaan Yritys- ja yhdistyspalvelut -> avustukset. 1 Valikosta valitaan lomake
TOIMINTA-AVUSTUKSEN SÄHKÖINEN HAKU 1. Lomakkeet löytyvät asiointiportaalista osoitteesta http://asiointi.hel.fi Etusivulta valitaan Yritys- ja yhdistyspalvelut -> avustukset. 1 Valikosta valitaan lomake
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
Käyttöjärjestelmät: Virtuaalimuisti
 Käyttöjärjestelmät: Virtuaalimuisti Teemu Saarelainen Tietotekniikka teemu.saarelainen@kyamk.fi Lähteet Stallings, W. Operating Systems Haikala, Järvinen, Käyttöjärjestelmät Eri Web-lähteet Muistinhallinta
Käyttöjärjestelmät: Virtuaalimuisti Teemu Saarelainen Tietotekniikka teemu.saarelainen@kyamk.fi Lähteet Stallings, W. Operating Systems Haikala, Järvinen, Käyttöjärjestelmät Eri Web-lähteet Muistinhallinta
Luento 3: Liikkeen kuvausta, differentiaaliyhtälöt
 Luento 3: Liikkeen kuvausta, differentiaaliyhtälöt Suoraviivainen liike integrointi Digress: vakio- vs. muuttuva kiihtyvyys käytännössä Kinematiikkaa yhdessä dimensiossa taustatietoa ELEC-A3110 Mekaniikka
Luento 3: Liikkeen kuvausta, differentiaaliyhtälöt Suoraviivainen liike integrointi Digress: vakio- vs. muuttuva kiihtyvyys käytännössä Kinematiikkaa yhdessä dimensiossa taustatietoa ELEC-A3110 Mekaniikka
Tehtävä 1. Vaihtoehtotehtävät.
 Kem-9.47 Prosessiautomaation perusteet Tentti.4. Tehtävä. Vaihtoehtotehtävät. Oikea vastaus +,5p, väärä vastaus -,5p ja ei vastausta p Maksimi +5,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA
Kem-9.47 Prosessiautomaation perusteet Tentti.4. Tehtävä. Vaihtoehtotehtävät. Oikea vastaus +,5p, väärä vastaus -,5p ja ei vastausta p Maksimi +5,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA
ELEC-C5070 Elektroniikkapaja (5 op)
") (5 op) Luento 5 A/D- ja D/A-muunnokset ja niiden vaikutus signaaleihin Signaalin A/D-muunnos Analogia-digitaalimuunnin (A/D-muunnin) muuttaa analogisen signaalin digitaaliseen muotoon, joka voidaan lukea
(5 op) Luento 5 A/D- ja D/A-muunnokset ja niiden vaikutus signaaleihin Signaalin A/D-muunnos Analogia-digitaalimuunnin (A/D-muunnin) muuttaa analogisen signaalin digitaaliseen muotoon, joka voidaan lukea
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 10 1 Sarjakehitelmiä Palautetaan mieliin, että potenssisarja on sarja joka on muotoa a n (x x 0 ) n = a 0 + a 1 (x x 0 ) + a 2 (x x 0 ) 2 + a 3 (x x 0 ) 3 +. n=0 Kyseinen
Matematiikan tukikurssi Kurssikerta 10 1 Sarjakehitelmiä Palautetaan mieliin, että potenssisarja on sarja joka on muotoa a n (x x 0 ) n = a 0 + a 1 (x x 0 ) + a 2 (x x 0 ) 2 + a 3 (x x 0 ) 3 +. n=0 Kyseinen
DA 50. Omavoimaiset linjasäätöventtiilit Paine-erosäätimet joiden paineeroalue DN 32-50
 DA 50 Omavoimaiset linjasäätöventtiilit Paine-erosäätimet joiden paineeroalue on aseteltavissa DN 32-50 IMI TA / Omavoimaiset linjasäätöventtiilit / DA 50 DA 50 Nämä lämmitys - ja jäähdytysjärjestelmien
DA 50 Omavoimaiset linjasäätöventtiilit Paine-erosäätimet joiden paineeroalue on aseteltavissa DN 32-50 IMI TA / Omavoimaiset linjasäätöventtiilit / DA 50 DA 50 Nämä lämmitys - ja jäähdytysjärjestelmien
Oletetaan, että funktio f on määritelty jollakin välillä ]x 0 δ, x 0 + δ[. Sen derivaatta pisteessä x 0 on
![Oletetaan, että funktio f on määritelty jollakin välillä ]x 0 δ, x 0 + δ[. Sen derivaatta pisteessä x 0 on](/thumbs/39/20459750.jpg "Oletetaan, että funktio f on määritelty jollakin välillä ]x 0 δ, x 0 + δ[. Sen derivaatta pisteessä x 0 on") Derivaatta Erilaisia lähestymistapoja: geometrinen (käyrän tangentti sekanttien raja-asentona) fysikaalinen (ajasta riippuvan funktion hetkellinen muutosnopeus) 1 / 13 Derivaatan määritelmä Määritelmä
Derivaatta Erilaisia lähestymistapoja: geometrinen (käyrän tangentti sekanttien raja-asentona) fysikaalinen (ajasta riippuvan funktion hetkellinen muutosnopeus) 1 / 13 Derivaatan määritelmä Määritelmä
Signaalit ja järjestelmät aika- ja taajuusalueissa
 Signaalit ja järjestelmät aika- ja taajuusalueissa Signaalit aika ja taajuusalueissa Muunnokset aika ja taajuusalueiden välillä Fourier sarja (jaksollinen signaali) Fourier muunnos (jaksoton signaali)
Signaalit ja järjestelmät aika- ja taajuusalueissa Signaalit aika ja taajuusalueissa Muunnokset aika ja taajuusalueiden välillä Fourier sarja (jaksollinen signaali) Fourier muunnos (jaksoton signaali)
Mat-2.129 Systeemien identifiointi
 Luennot: TkT, erik. op. to 16-18 U261 Harjoitukset tekn.yo Ville Koskinen pe 10-12 joko mikroluokka U352 tai U261 Kurssikirja Ljung & Glad: Modeling of Dynamic Systems, Prentice-Hall, 1994 TAI Ibid.: Modelbygge
Luennot: TkT, erik. op. to 16-18 U261 Harjoitukset tekn.yo Ville Koskinen pe 10-12 joko mikroluokka U352 tai U261 Kurssikirja Ljung & Glad: Modeling of Dynamic Systems, Prentice-Hall, 1994 TAI Ibid.: Modelbygge
Pikaohje Aplisens APIS type 1X0 ja 2XO
 Pikaohje Aplisens APIS type 1X0 ja 2XO Koivupuistontie 26, 01510, Vantaa www.saato.fi, sales@saato.fi, 09-759 7850 Sisällys 1. Yleistä...3 2. Parametritilan toiminnot...4 3. Käyttöönotto pikaohje...5 1.
Pikaohje Aplisens APIS type 1X0 ja 2XO Koivupuistontie 26, 01510, Vantaa www.saato.fi, sales@saato.fi, 09-759 7850 Sisällys 1. Yleistä...3 2. Parametritilan toiminnot...4 3. Käyttöönotto pikaohje...5 1.
Tasapainotilaan vaikuttavia tekijöitä
 REAKTIOT JA TASAPAINO, KE5 Tasapainotilaan vaikuttavia tekijöitä Fritz Haber huomasi ammoniakkisynteesiä kehitellessään, että olosuhteet vaikuttavat ammoniakin määrään tasapainoseoksessa. Hän huomasi,
REAKTIOT JA TASAPAINO, KE5 Tasapainotilaan vaikuttavia tekijöitä Fritz Haber huomasi ammoniakkisynteesiä kehitellessään, että olosuhteet vaikuttavat ammoniakin määrään tasapainoseoksessa. Hän huomasi,
PID-säätimen virityslohkon valinta ja käyttöönotto SIMATIC S7-300 logiikassa
 Tampereen ammattikorkeakoulu Sähkötekniikan koulutusohjelma Automaatiotekniikka Jussi Ollila Opinnäytetyö PID-säätimen virityslohkon valinta ja käyttöönotto SIMATIC S7-300 logiikassa Työn ohjaaja Työn
Tampereen ammattikorkeakoulu Sähkötekniikan koulutusohjelma Automaatiotekniikka Jussi Ollila Opinnäytetyö PID-säätimen virityslohkon valinta ja käyttöönotto SIMATIC S7-300 logiikassa Työn ohjaaja Työn
3 Määrätty integraali
 Määrätty integraali. a) Muodostuva alue on kolmio, jonka kanta on. Kolmion korkeus on funktion arvo kohdassa, eli f() = = 6. Lasketaan A() kolmion pintaalana. 6 A() 6 Vastaus: A() = 6 b) Muodostuva alue
Määrätty integraali. a) Muodostuva alue on kolmio, jonka kanta on. Kolmion korkeus on funktion arvo kohdassa, eli f() = = 6. Lasketaan A() kolmion pintaalana. 6 A() 6 Vastaus: A() = 6 b) Muodostuva alue
Signaalien datamuunnokset. Näytteenotto ja pito -piirit
 Signaalien datamuunnokset Muunnoskomponentit Näytteenotto ja pitopiirit Multiplekserit A/D-muuntimet Jännitereferenssit D/A-muuntimet Petri Kärhä 26/02/2008 Signaalien datamuunnokset 1 Näytteenotto ja
Signaalien datamuunnokset Muunnoskomponentit Näytteenotto ja pitopiirit Multiplekserit A/D-muuntimet Jännitereferenssit D/A-muuntimet Petri Kärhä 26/02/2008 Signaalien datamuunnokset 1 Näytteenotto ja
PID-sa a timen viritta minen Matlabilla ja simulinkilla
 PID-sa a timen viritta minen Matlabilla ja simulinkilla Kriittisen värähtelyn menetelmä Tehtiin kuvan 1 mukainen tasavirtamoottorin piiri PID-säätimellä. Virittämistä varten PID-säätimen ja asetettiin
PID-sa a timen viritta minen Matlabilla ja simulinkilla Kriittisen värähtelyn menetelmä Tehtiin kuvan 1 mukainen tasavirtamoottorin piiri PID-säätimellä. Virittämistä varten PID-säätimen ja asetettiin
Pyörivä lämmönsiirrin ECRA
 Pyörivä lämmönsiirrin ECRA Roottori Otsapinnat Tarkista, että roottorin pinta ei ole pölyn peitossa. Puhdistus tapahtuu pölynimurilla tai puhaltamalla läpi paineilmalla. Puhalluksen pitää tapahtua puhtaalta
Pyörivä lämmönsiirrin ECRA Roottori Otsapinnat Tarkista, että roottorin pinta ei ole pölyn peitossa. Puhdistus tapahtuu pölynimurilla tai puhaltamalla läpi paineilmalla. Puhalluksen pitää tapahtua puhtaalta
Signaalien datamuunnokset
 Signaalien datamuunnokset Muunnoskomponentit Näytteenotto ja pitopiirit Multiplekserit A/D-muuntimet Jännitereferenssit D/A-muuntimet Petri Kärhä 17/02/2005 Luento 4b: Signaalien datamuunnokset 1 Näytteenotto
Signaalien datamuunnokset Muunnoskomponentit Näytteenotto ja pitopiirit Multiplekserit A/D-muuntimet Jännitereferenssit D/A-muuntimet Petri Kärhä 17/02/2005 Luento 4b: Signaalien datamuunnokset 1 Näytteenotto
IMPACT 4.01.10 7.9.2015. 64/Kuvaus, Rakenne ja toiminta//volvon dynaaminen ohjaus, toimintakuvaus
 Tulostanut:Pekka Vuorivirta Palvelu Alustatunnus Polku 64/Kuvaus, Rakenne ja toiminta//volvon dynaaminen ohjaus, toimintakuvaus Malli Tunniste FH (4) 132355236 Julkaisupäivämäärä 29.11.2013 Tunnus/Käyttö
Tulostanut:Pekka Vuorivirta Palvelu Alustatunnus Polku 64/Kuvaus, Rakenne ja toiminta//volvon dynaaminen ohjaus, toimintakuvaus Malli Tunniste FH (4) 132355236 Julkaisupäivämäärä 29.11.2013 Tunnus/Käyttö
dametric AGS-anturi HUOLTOKÄSIKIRJA AGS-XXX Service Manual FI.docx Lokakuu 12, 2010 / BL Sivu 1 (8)
") dametric AGS-anturi AGS-XXX Service Manual FI.docx Lokakuu 12, 2010 / BL Sivu 1 (8) Sisältö 1 Yleistä... 2 2 Anturin asennus ja poisto... 3 3 Kotelon ja putken välinen liitos... 4 4 Kärjen ja kotelon välinen
dametric AGS-anturi AGS-XXX Service Manual FI.docx Lokakuu 12, 2010 / BL Sivu 1 (8) Sisältö 1 Yleistä... 2 2 Anturin asennus ja poisto... 3 3 Kotelon ja putken välinen liitos... 4 4 Kärjen ja kotelon välinen
1. Hidaskäyntiset moottorit
 1. Hidaskäyntiset moottorit 1.1 Radiaalimäntämoottorit 1.1.1 Ulkoisin virtauskanavin varustetut moottorit Ulkoisin virtauskanavin varustettujen moottorien arvoja: (moottorikoon mukaan) - käyttöpainealue
1. Hidaskäyntiset moottorit 1.1 Radiaalimäntämoottorit 1.1.1 Ulkoisin virtauskanavin varustetut moottorit Ulkoisin virtauskanavin varustettujen moottorien arvoja: (moottorikoon mukaan) - käyttöpainealue
Luento 6. June 1, 2015. Luento 6
 June 1, 2015 Normaalimuodon pelissä on luontevaa ajatella, että pelaajat tekevät valintansa samanaikaisesti. Ekstensiivisen muodon peleissä pelin jonottaisella rakenteella on keskeinen merkitys. Aluksi
June 1, 2015 Normaalimuodon pelissä on luontevaa ajatella, että pelaajat tekevät valintansa samanaikaisesti. Ekstensiivisen muodon peleissä pelin jonottaisella rakenteella on keskeinen merkitys. Aluksi
TERMO ÄLYKKYYTTÄ PIENTALON SÄHKÖLÄMMITYKSEEN.
 TERMO ÄLYKKYYTTÄ PIENTALON SÄHKÖLÄMMITYKSEEN. Helsingin Energia on energiatehokkuuden edelläkävijä ja yksi Pohjoismaiden merkittävimmistä energiayhtiöistä. Palvelemme noin 400 000 asiakasta Suomessa ja
TERMO ÄLYKKYYTTÄ PIENTALON SÄHKÖLÄMMITYKSEEN. Helsingin Energia on energiatehokkuuden edelläkävijä ja yksi Pohjoismaiden merkittävimmistä energiayhtiöistä. Palvelemme noin 400 000 asiakasta Suomessa ja
Hyvyyskriteerit. ELEC-C1230 Säätötekniikka. Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit
 Hyvyyskriteerit ELEC-C1230 Säätötekniikka Aikaisemmilla luennoilla on havainnollistettu, miten systeemien käyttäytymiseen voi vaikuttaa säätämällä niitä. Epästabiileista systeemeistä saadaan stabiileja,
Hyvyyskriteerit ELEC-C1230 Säätötekniikka Aikaisemmilla luennoilla on havainnollistettu, miten systeemien käyttäytymiseen voi vaikuttaa säätämällä niitä. Epästabiileista systeemeistä saadaan stabiileja,
Kompaktit ilmanvaihtoyksiköt. Topvex FR, SR, TR
 Topvex FR, SR, TR 2069517-FI 22-08-2011V.A004 (C. 3.0-1-06) Sisällysluettelo 1... 1 1.1 Toimintoasetukset... 1 1.2 Viikko-ohjelman ohjelmointi... 5 1.3 Hälytyskonfiguraatio... 6 1.4 Huomautukset... 9 1
Topvex FR, SR, TR 2069517-FI 22-08-2011V.A004 (C. 3.0-1-06) Sisällysluettelo 1... 1 1.1 Toimintoasetukset... 1 1.2 Viikko-ohjelman ohjelmointi... 5 1.3 Hälytyskonfiguraatio... 6 1.4 Huomautukset... 9 1
KEMA221 2009 KEMIALLINEN TASAPAINO ATKINS LUKU 7
 KEMIALLINEN TASAPAINO Määritelmiä Kemiallinen reaktio A B pyrkii kohti tasapainoa. Yleisessä tapauksessa saavutetaan tasapainoa vastaava reaktioseos, jossa on läsnä sekä lähtöaineita että tuotteita: A
KEMIALLINEN TASAPAINO Määritelmiä Kemiallinen reaktio A B pyrkii kohti tasapainoa. Yleisessä tapauksessa saavutetaan tasapainoa vastaava reaktioseos, jossa on läsnä sekä lähtöaineita että tuotteita: A
Flash AD-muunnin. suurin kaistanleveys muista muuntimista (gigahertsejä) pieni resoluutio (max 8) kalliita
 pieni resoluutio (max 8) kalliita") Flash AD-muunnin Flash AD-muunnin koostuu monesta peräkkäisestä komparaattorista, joista jokainen vertaa muunnettavaa signaalia omaan referenssijännitteeseensä. Referenssijännite aikaansaadaan jännitteenjaolla:
Flash AD-muunnin Flash AD-muunnin koostuu monesta peräkkäisestä komparaattorista, joista jokainen vertaa muunnettavaa signaalia omaan referenssijännitteeseensä. Referenssijännite aikaansaadaan jännitteenjaolla:
PD-säädin PID PID-säädin
 -äädin - äätö on ykinkertainen äätömuoto, jota voidaan kutua myö uhteuttavaki äädöki. Sinä lähtöignaali on uoraa uhteea tuloignaalin. -äätimen uhdealue kertoo kuinka paljon mittauuure aa muuttua ennen
-äädin - äätö on ykinkertainen äätömuoto, jota voidaan kutua myö uhteuttavaki äädöki. Sinä lähtöignaali on uoraa uhteea tuloignaalin. -äätimen uhdealue kertoo kuinka paljon mittauuure aa muuttua ennen
TILASTOLLINEN LAADUNVALVONTA
 1 Aki Taanila TILASTOLLINEN LAADUNVALVONTA 31.10.2008 2 TILASTOLLINEN LAADUNVALVONTA Tasalaatuisuus on hyvä tavoite, jota ei yleensä voida täydellisesti saavuttaa: asiakaspalvelun laatu vaihtelee, vaikka
1 Aki Taanila TILASTOLLINEN LAADUNVALVONTA 31.10.2008 2 TILASTOLLINEN LAADUNVALVONTA Tasalaatuisuus on hyvä tavoite, jota ei yleensä voida täydellisesti saavuttaa: asiakaspalvelun laatu vaihtelee, vaikka
MAA10 HARJOITUSTEHTÄVIÄ
 MAA0 Määritä se funktion f: f() = + integraalifunktio, jolle F() = Määritä se funktion f : f() = integraalifunktio, jonka kuvaaja sivuaa suoraa y = d Integroi: a) d b) c) d d) Määritä ( + + 8 + a) d 5
MAA0 Määritä se funktion f: f() = + integraalifunktio, jolle F() = Määritä se funktion f : f() = integraalifunktio, jonka kuvaaja sivuaa suoraa y = d Integroi: a) d b) c) d d) Määritä ( + + 8 + a) d 5
Sääasema Probyte JUNIOR
 Sääasema Probyte JUNIOR JUNIOR sääanturi COM1 12VDC RS-232 signaali PC W9x Excel-tiedosto PROBYTE JUNIOR sääanturin toimintaperiaate Yleistä Probyte SÄÄASEMA JUNIOR1 on sään mittaukseen tarkoitettu ulkoanturi,
Sääasema Probyte JUNIOR JUNIOR sääanturi COM1 12VDC RS-232 signaali PC W9x Excel-tiedosto PROBYTE JUNIOR sääanturin toimintaperiaate Yleistä Probyte SÄÄASEMA JUNIOR1 on sään mittaukseen tarkoitettu ulkoanturi,
Tulisijojen testaaminen
 Tulisijojen testaaminen Tulisijojen testaaminen Voimassa olevat tulisijojen standardit ovat SFS-EN 13240 (kamiinat), SFS-EN 13229 (takkasydämet), SFS-EN 15250 (varaavat uunit), SFS-EN 15821 (saunan kiukaat),
Tulisijojen testaaminen Tulisijojen testaaminen Voimassa olevat tulisijojen standardit ovat SFS-EN 13240 (kamiinat), SFS-EN 13229 (takkasydämet), SFS-EN 15250 (varaavat uunit), SFS-EN 15821 (saunan kiukaat),
PID-SÄÄTIMEN MALLIPOHJAISTEN VIRITYSMENETELMIEN ANALYSOINTI JA KOKEELLINEN VERTAILU SOVELLUKSENA STIRLING-KONE
 PID-SÄÄTIMEN MALLIPOHJAISTEN VIRITYSMENETELMIEN ANALYSOINTI JA KOKEELLINEN VERTAILU SOVELLUKSENA STIRLING-KONE Ammattikorkeakoulun opinnäytetyö Automaatiotekniikan koulutusohjelma Valkeakoski,.8.203 Ville-Pietari
PID-SÄÄTIMEN MALLIPOHJAISTEN VIRITYSMENETELMIEN ANALYSOINTI JA KOKEELLINEN VERTAILU SOVELLUKSENA STIRLING-KONE Ammattikorkeakoulun opinnäytetyö Automaatiotekniikan koulutusohjelma Valkeakoski,.8.203 Ville-Pietari
SAVUKAASUJEN VALVONTAKESKUS 1/6 HYDROSET ER - O2
 SAVUKAASUJEN VALVONTAKESKUS /6 ER-O2- valvontakeskus on tarkoitettu höyry- ja vesikattiloiden savukaasujen valvontaan ja säätöön. Keskus tunnustelee savukaasuja Lambda-anturin ja Pt - anturin välityksellä.
SAVUKAASUJEN VALVONTAKESKUS /6 ER-O2- valvontakeskus on tarkoitettu höyry- ja vesikattiloiden savukaasujen valvontaan ja säätöön. Keskus tunnustelee savukaasuja Lambda-anturin ja Pt - anturin välityksellä.
OHJ-4301 Sulautettu Ohjelmointi
 OHJ-4301 Sulautettu Ohjelmointi (http://www.cs.tut.fi/~sulo/) /~sulo/) 5op, to 12-14, 14, TB 109 Tommi Mikkonen, tommi.mikkonen@tut.fi Arto Salminen, arto.salminen@tut.fi Läpäisyvaatimukset Hyväksytysti
OHJ-4301 Sulautettu Ohjelmointi (http://www.cs.tut.fi/~sulo/) /~sulo/) 5op, to 12-14, 14, TB 109 Tommi Mikkonen, tommi.mikkonen@tut.fi Arto Salminen, arto.salminen@tut.fi Läpäisyvaatimukset Hyväksytysti
Fysiikan perusteet. Työ, energia ja energian säilyminen. Antti Haarto 20.09.2011. www.turkuamk.fi
 Fysiikan perusteet Työ, energia ja energian säilyminen Antti Haarto 0.09.0 Voiman tekemä työ Voiman F tekemä työ W määritellään kuljetun matkan s ja matkan suuntaisen voiman komponentin tulona. Yksikkö:
Fysiikan perusteet Työ, energia ja energian säilyminen Antti Haarto 0.09.0 Voiman tekemä työ Voiman F tekemä työ W määritellään kuljetun matkan s ja matkan suuntaisen voiman komponentin tulona. Yksikkö:
MONITOIMIMOOTTORI EAM-30-MT EAM-52-MT ASENNUS- JA KÄYTTÖOHJE
 MONITOIMIMOOTTORI EAM-30-MT EAM-52-MT ASENNUS- JA KÄYTTÖOHJE Kaytto_ohje_EAM_30_52_MT_A5_ver7_2 1. Yleistä Moottori on ns. monitoimimoottori, jolloin samassa moottorissa on useita toimintatapoja. Sopivat
MONITOIMIMOOTTORI EAM-30-MT EAM-52-MT ASENNUS- JA KÄYTTÖOHJE Kaytto_ohje_EAM_30_52_MT_A5_ver7_2 1. Yleistä Moottori on ns. monitoimimoottori, jolloin samassa moottorissa on useita toimintatapoja. Sopivat
Sonic Boom BD4000. Käyttöohje
 Sonic Boom BD4000 Käyttöohje Tärkeää: Lue nämä käyttöohjeet ensin huolella läpi jotta saat kaiken hyödyn laitteestasi. Säästä ohjeet tulevia tarpeita varten. Käytä ainoastaan laitteen mukana tullutta verkkolaitetta
Sonic Boom BD4000 Käyttöohje Tärkeää: Lue nämä käyttöohjeet ensin huolella läpi jotta saat kaiken hyödyn laitteestasi. Säästä ohjeet tulevia tarpeita varten. Käytä ainoastaan laitteen mukana tullutta verkkolaitetta
www.kastowin.com Sahaus. Varastointi. Ja enemmän.
 Uusi KASTOwin Mestariteos sarjatuotantona www.astowin.com Sahaus. Varastointi. Ja enemmän. Enemmän uin ainutlaatuinen: Uusi KASTOwin. Kannattavan automaattisahausen asi täreintä teijää ovat: suuri leuuteho
Uusi KASTOwin Mestariteos sarjatuotantona www.astowin.com Sahaus. Varastointi. Ja enemmän. Enemmän uin ainutlaatuinen: Uusi KASTOwin. Kannattavan automaattisahausen asi täreintä teijää ovat: suuri leuuteho
PROBYTE kallistusnäyttöautomatiikka
 PROBYTE kallistusnäyttöautomatiikka 1 Toimintaperiaate PROBYTE kallistusnäyttöautomatiikka on tarkoitettu puoliautomaattiseksi tiekoneiden kallistuskulmamittariksi. Laite ohjaa käyttäjää äänimerkeillä
PROBYTE kallistusnäyttöautomatiikka 1 Toimintaperiaate PROBYTE kallistusnäyttöautomatiikka on tarkoitettu puoliautomaattiseksi tiekoneiden kallistuskulmamittariksi. Laite ohjaa käyttäjää äänimerkeillä
LOPPURAPORTTI 19.11.2007. Lämpötilahälytin. 0278116 Hans Baumgartner xxxxxxx nimi nimi
 LOPPURAPORTTI 19.11.2007 Lämpötilahälytin 0278116 Hans Baumgartner xxxxxxx nimi nimi KÄYTETYT MERKINNÄT JA LYHENTEET... 3 JOHDANTO... 4 1. ESISELOSTUS... 5 1.1 Diodi anturina... 5 1.2 Lämpötilan ilmaisu...
LOPPURAPORTTI 19.11.2007 Lämpötilahälytin 0278116 Hans Baumgartner xxxxxxx nimi nimi KÄYTETYT MERKINNÄT JA LYHENTEET... 3 JOHDANTO... 4 1. ESISELOSTUS... 5 1.1 Diodi anturina... 5 1.2 Lämpötilan ilmaisu...
Hiukkaspäästöjen mittaus
 Hiukkaspäästöjen mittaus Juha-Matti Hirvonen MIKES-Aalto 24.3.2010 Sisältö Hiukkaset Koot Synty Terveysvaikutukset ja kustannukset Lainsäädäntö Kansallinen EU Mittausmenetelmiä Mekaaniset Sähköiset Optiset
Hiukkaspäästöjen mittaus Juha-Matti Hirvonen MIKES-Aalto 24.3.2010 Sisältö Hiukkaset Koot Synty Terveysvaikutukset ja kustannukset Lainsäädäntö Kansallinen EU Mittausmenetelmiä Mekaaniset Sähköiset Optiset
Ohje hakulomakkeen täyttämiseen yliopistohaku.fi -palvelussa
 Hakijan ohje Opetushallitus kevät 2013 Ohje hakulomakkeen täyttämiseen yliopistohaku.fi -palvelussa Tässä ohjeessa on kuvattu miten hakulomake täytetään ja lähetetään yliopistohaku.fi-palvelussa. Näytön
Hakijan ohje Opetushallitus kevät 2013 Ohje hakulomakkeen täyttämiseen yliopistohaku.fi -palvelussa Tässä ohjeessa on kuvattu miten hakulomake täytetään ja lähetetään yliopistohaku.fi-palvelussa. Näytön
Flash AD-muunnin. Ominaisuudet. +nopea -> voidaan käyttää korkeataajuuksisen signaalin muuntamiseen (GHz) +yksinkertainen
 +yksinkertainen") Flash AD-muunnin Koostuu vastusverkosta ja komparaattoreista. Komparaattorit vertailevat vastuksien jännitteitä referenssiin. Tilanteesta riippuen kompraattori antaa ykkösen tai nollan ja näistä kootaan
Flash AD-muunnin Koostuu vastusverkosta ja komparaattoreista. Komparaattorit vertailevat vastuksien jännitteitä referenssiin. Tilanteesta riippuen kompraattori antaa ykkösen tai nollan ja näistä kootaan
RADIONUKLIDILABORATORION ILMANVAIHTO RADIOKEMISTI JYRI LEHTO, MEILAHDEN ISOTOOPPIYKSIKKÖ 10.12.2015
 RADIONUKLIDILABORATORION ILMANVAIHTO RADIOKEMISTI JYRI LEHTO, MEILAHDEN ISOTOOPPIYKSIKKÖ 10.12.2015 10.12.2015 2 RAKENTAMISMÄÄRÄYSKOKOELMA Osa D2 Rakennusten sisäilmasto ja ilmanvaihto 10.12.2015 3 STUK
RADIONUKLIDILABORATORION ILMANVAIHTO RADIOKEMISTI JYRI LEHTO, MEILAHDEN ISOTOOPPIYKSIKKÖ 10.12.2015 10.12.2015 2 RAKENTAMISMÄÄRÄYSKOKOELMA Osa D2 Rakennusten sisäilmasto ja ilmanvaihto 10.12.2015 3 STUK
8. kierros. 2. Lähipäivä
 8. kierros 2. Lähipäivä Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia Tavoitteet: tietää Saavutettavuus
8. kierros 2. Lähipäivä Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia Tavoitteet: tietää Saavutettavuus
Suodattimet. Suodatintyypit: Bessel Chebyshev Elliptinen Butterworth. Suodattimet samalla asteluvulla (amplitudivaste)
") Suodattimet Suodatintyypit: Bessel Chebyshev Elliptinen Butterworth Suodattimet samalla asteluvulla (amplitudivaste) Kuvasta nähdään että elliptinen suodatin on terävin kaikista suodattimista, mutta sisältää
Suodattimet Suodatintyypit: Bessel Chebyshev Elliptinen Butterworth Suodattimet samalla asteluvulla (amplitudivaste) Kuvasta nähdään että elliptinen suodatin on terävin kaikista suodattimista, mutta sisältää
Nikkeliraaka-aineiden epäpuhtausprofiilin määritys
 Nikkeliraaka-aineiden epäpuhtausprofiilin määritys Analytiikkapäivät Kokkola 28.11.2012 Paul Cooper 1 Sisältö Tavoitteet Analyyttiset menetelmät / näytteen valmistus Nikkeliraaka-aineiden mittaaminen XRF:llä
Nikkeliraaka-aineiden epäpuhtausprofiilin määritys Analytiikkapäivät Kokkola 28.11.2012 Paul Cooper 1 Sisältö Tavoitteet Analyyttiset menetelmät / näytteen valmistus Nikkeliraaka-aineiden mittaaminen XRF:llä
MultiBoot Käyttöopas
 MultiBoot Käyttöopas Copyright 2006 Hewlett-Packard Development Company, L.P. Tässä olevat tiedot voivat muuttua ilman ennakkoilmoitusta. Ainoat HP:n tuotteita ja palveluja koskevat takuut mainitaan erikseen
MultiBoot Käyttöopas Copyright 2006 Hewlett-Packard Development Company, L.P. Tässä olevat tiedot voivat muuttua ilman ennakkoilmoitusta. Ainoat HP:n tuotteita ja palveluja koskevat takuut mainitaan erikseen
Taajuusmuuttaja FC101 (pikaopas)
") Tilausnumero C - Sisällysluettelo Sivu Turvaohjeet...1 IT-verkko 3x230VAC...2 Liitännät...2 Ohjauspaneeli LCP...3 Käsikäyttö...3 Pyörimissuunnan vaihto...3 Lisätietoa...3 Kytkentäkaavio...4 Peruskonfiguraatio...5
Tilausnumero C - Sisällysluettelo Sivu Turvaohjeet...1 IT-verkko 3x230VAC...2 Liitännät...2 Ohjauspaneeli LCP...3 Käsikäyttö...3 Pyörimissuunnan vaihto...3 Lisätietoa...3 Kytkentäkaavio...4 Peruskonfiguraatio...5
Kauko-ohjaimen käyttöohje. Part No.: R08019034086. OM-GS02-1009(0)-Acson FAN SWING MODE TURBO TIMER OFF CANCEL. Acson A5WM15JR Acson A5WM25JR
-Acson FAN SWING MODE TURBO TIMER OFF CANCEL. Acson A5WM15JR Acson A5WM25JR") Kauko-ohjaimen käyttöohje Part No.: R08019034086 OM-GS0-1009(0)-Acson Acson A5WM15JR Acson A5WM5JR 1 6 7 9 3 4 5 13 1 11 8 10 Kiinnitys seinään Paristojen asennus (AAA.R03) Paristot 1) Tyyppi AAA R03 )
Kauko-ohjaimen käyttöohje Part No.: R08019034086 OM-GS0-1009(0)-Acson Acson A5WM15JR Acson A5WM5JR 1 6 7 9 3 4 5 13 1 11 8 10 Kiinnitys seinään Paristojen asennus (AAA.R03) Paristot 1) Tyyppi AAA R03 )
Jussi Eerikäinen, 2014
 Ennakointi on kuin shakin peluuta. Pelaajan on ennakoitava vastustajan tulevia siirtoja ja tehtävä valintoja, jotka saattavat muuttua jo seuraavien siirtojen aikana. Tavoitteena, visiona, on vastustajan
Ennakointi on kuin shakin peluuta. Pelaajan on ennakoitava vastustajan tulevia siirtoja ja tehtävä valintoja, jotka saattavat muuttua jo seuraavien siirtojen aikana. Tavoitteena, visiona, on vastustajan
Dynaamiset regressiomallit
 MS-C2128 Ennustaminen ja Aikasarja-analyysi, Lauri Viitasaari Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2016 Tilastolliset aikasarjat voidaan jakaa kahteen
MS-C2128 Ennustaminen ja Aikasarja-analyysi, Lauri Viitasaari Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2016 Tilastolliset aikasarjat voidaan jakaa kahteen
Sään ennustamisesta ja ennusteiden epävarmuuksista. Ennuste kesälle 2014. Anssi Vähämäki Ryhmäpäällikkö Sääpalvelut Ilmatieteen laitos
 Sään ennustamisesta ja ennusteiden epävarmuuksista Ennuste kesälle 2014 Anssi Vähämäki Ryhmäpäällikkö Sääpalvelut Ilmatieteen laitos 22.5.2014 Säätiedoissa tulisi ottaa huomioon paikalliset lumitykit,
Sään ennustamisesta ja ennusteiden epävarmuuksista Ennuste kesälle 2014 Anssi Vähämäki Ryhmäpäällikkö Sääpalvelut Ilmatieteen laitos 22.5.2014 Säätiedoissa tulisi ottaa huomioon paikalliset lumitykit,
TOMI MÖNKKÖNEN TASE-KONSEPTI PROSESSIHÖYRYVERKON HALLINNASSA. Diplomityö
 TOMI MÖNKKÖNEN TASE-KONSEPTI PROSESSIHÖYRYVERKON HALLINNASSA Diplomityö Tarkastaja: professori Matti Vilkko Tarkastaja ja aihe hyväksytty Teknisten tieteiden tiedekuntaneuvoston kokouksessa 5. marraskuuta
TOMI MÖNKKÖNEN TASE-KONSEPTI PROSESSIHÖYRYVERKON HALLINNASSA Diplomityö Tarkastaja: professori Matti Vilkko Tarkastaja ja aihe hyväksytty Teknisten tieteiden tiedekuntaneuvoston kokouksessa 5. marraskuuta
Successive approximation AD-muunnin
 AD-muunnin Koostuu neljästä osasta: näytteenotto- ja pitopiiristä, (sample and hold S/H) komparaattorista, digitaali-analogiamuuntimesta (DAC) ja siirtorekisteristä. (successive approximation register
AD-muunnin Koostuu neljästä osasta: näytteenotto- ja pitopiiristä, (sample and hold S/H) komparaattorista, digitaali-analogiamuuntimesta (DAC) ja siirtorekisteristä. (successive approximation register
Alias-ilmiö eli taajuuden laskostuminen
 Prosessiorientoituneet mallit Todellista hybridijärjestelmää ELEC-C1230 Säätötekniikka Luku 12: Näytteenottoteoreema ja jatkuvien säätimien diskreetit approksimaatiot Prosessiorientoituneet mallit katsotaan
Prosessiorientoituneet mallit Todellista hybridijärjestelmää ELEC-C1230 Säätötekniikka Luku 12: Näytteenottoteoreema ja jatkuvien säätimien diskreetit approksimaatiot Prosessiorientoituneet mallit katsotaan
9.10.2015. Vesimaksun yksikköhinta, / m 3 Liittyjältä peritään vesimaksua toimitetusta vedestä mitatun kulutuksen mukaan.
 Liite 1 1 (5) HSY:N VESIHUOLLON TAKSA 1.1.2016 ALKAEN 1 Käyttömaksut Käyttömaksu peritään kiinteistön käyttämän veden ja poisjohdettavan jäteveden määrän ja laadun perusteella. Maksua peritään erikseen
Liite 1 1 (5) HSY:N VESIHUOLLON TAKSA 1.1.2016 ALKAEN 1 Käyttömaksut Käyttömaksu peritään kiinteistön käyttämän veden ja poisjohdettavan jäteveden määrän ja laadun perusteella. Maksua peritään erikseen
Anturit ja Arduino. ELEC-A4010 Sähköpaja Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka
 Anturit ja Arduino Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka Anturit ja Arduino Luennon sisältö 1. Taustaa 2. Antureiden ominaisuudet 3. AD-muunnos 4. Antureiden lukeminen Arduinolla
Anturit ja Arduino Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka Anturit ja Arduino Luennon sisältö 1. Taustaa 2. Antureiden ominaisuudet 3. AD-muunnos 4. Antureiden lukeminen Arduinolla
Dynaamisen järjestelmän siirtofunktio
 Dynaamisen järjestelmän siirtofunktio Nyt päästään soveltamaan matriisilaskentaa ja Laplace muunnosta. Tutkikaamme, miten lineaarista mallia voidaan käsitellä. Kuten edellä on jo nähty säätötekniikassa
Dynaamisen järjestelmän siirtofunktio Nyt päästään soveltamaan matriisilaskentaa ja Laplace muunnosta. Tutkikaamme, miten lineaarista mallia voidaan käsitellä. Kuten edellä on jo nähty säätötekniikassa
KÄYTTÖOHJE FLSNIF KÄYTTÖÖNOTTO V2.2 (23.04.2014) 1 (5)
 1 (5)") V2.2 (23.04.2014) 1 (5) KÄYTTÖÖNOTTO 1. Asenna tietokoneeseen USB-sarjaporttiajuri laitteen mukana toimitetulta CD-levyltä. HUOM: Jos CD-levyn ajuri ei sovellu tietokoneeseesi, voit hakea ajurin internetistä
V2.2 (23.04.2014) 1 (5) KÄYTTÖÖNOTTO 1. Asenna tietokoneeseen USB-sarjaporttiajuri laitteen mukana toimitetulta CD-levyltä. HUOM: Jos CD-levyn ajuri ei sovellu tietokoneeseesi, voit hakea ajurin internetistä
Energiatodistusten laatijoiden verkostoitumistilaisuus
 Energiatodistusten laatijoiden verkostoitumistilaisuus Helsinki 10.5.2016 Janne Rasi, energia-asiantuntija 12.10.2007 Tekijän nimi Uudet rakennusluokat käyttöön 1.7.2016 Energiatodistusrekisteri Ajankohtaista
Energiatodistusten laatijoiden verkostoitumistilaisuus Helsinki 10.5.2016 Janne Rasi, energia-asiantuntija 12.10.2007 Tekijän nimi Uudet rakennusluokat käyttöön 1.7.2016 Energiatodistusrekisteri Ajankohtaista
Säätötekniikan perusteet. Merja Mäkelä 3.3.2003 KyAMK
 Säätötekniikan perusteet Merja Mäkelä 3.3.2003 KyAMK Johdanto Instrumentointi automaation osana teollisuusprosessien hallinnassa Mittalaitteet - säätimet - toimiyksiköt Paperikoneella 500-1000 mittaus-,
Säätötekniikan perusteet Merja Mäkelä 3.3.2003 KyAMK Johdanto Instrumentointi automaation osana teollisuusprosessien hallinnassa Mittalaitteet - säätimet - toimiyksiköt Paperikoneella 500-1000 mittaus-,
Numeeriset menetelmät TIEA381. Luento 11. Kirsi Valjus. Jyväskylän yliopisto. Luento 11 () Numeeriset menetelmät / 37
 Numeeriset menetelmät / 37") Numeeriset menetelmät TIEA381 Luento 11 Kirsi Valjus Jyväskylän yliopisto Luento 11 () Numeeriset menetelmät 24.4.2013 1 / 37 Luennon 11 sisältö Numeerisesta integroinnista ja derivoinnista Adaptiiviset
Numeeriset menetelmät TIEA381 Luento 11 Kirsi Valjus Jyväskylän yliopisto Luento 11 () Numeeriset menetelmät 24.4.2013 1 / 37 Luennon 11 sisältö Numeerisesta integroinnista ja derivoinnista Adaptiiviset
Käytännön radiotekniikkaa: Epälineaarinen komponentti ja signaalien siirtely taajuusalueessa (+ laboratoriotyön 2 esittely)
") Käytännön radiotekniikkaa: Epälineaarinen komponentti ja signaalien siirtely taajuusalueessa (+ laboratoriotyön 2 esittely) ELEC-C5070 Elektroniikkapaja, 21.9.2015 Huom: Kurssissa on myöhemmin erikseen
Käytännön radiotekniikkaa: Epälineaarinen komponentti ja signaalien siirtely taajuusalueessa (+ laboratoriotyön 2 esittely) ELEC-C5070 Elektroniikkapaja, 21.9.2015 Huom: Kurssissa on myöhemmin erikseen
AUTON LIIKETEHTÄVIÄ: KESKIKIIHTYVYYS ak JA HETKELLINEN KIIHTYVYYS a(t) (tangenttitulkinta) sekä matka fysikaalisena pinta-alana (t,
 (tangenttitulkinta) sekä matka fysikaalisena pinta-alana (t,") AUTON LIIKETEHTÄVIÄ: KESKIKIIHTYVYYS ak JA HETKELLINEN KIIHTYVYYS a(t) (tangenttitulkinta) sekä matka fysikaalisena pinta-alana (t, v)-koordinaatistossa ruutumenetelmällä. Tehtävä 4 (~YO-K97-1). Tekniikan
AUTON LIIKETEHTÄVIÄ: KESKIKIIHTYVYYS ak JA HETKELLINEN KIIHTYVYYS a(t) (tangenttitulkinta) sekä matka fysikaalisena pinta-alana (t, v)-koordinaatistossa ruutumenetelmällä. Tehtävä 4 (~YO-K97-1). Tekniikan
Versio 1. Hiilidioksidimittari 7787 Käyttöohje. Hiilidioksidimittari 7787 - Käyttöohje
 Versio 1 Hiilidioksidimittari 7787 Käyttöohje Hiilidioksidimittari 7787 - Käyttöohje Sisällys Johdanto... 3 Pakkaussisältö... 3 LCD näyttö... 4 Painikkeet... 4 Toiminnot... 5 Käynnistys ja sammutus...
Versio 1 Hiilidioksidimittari 7787 Käyttöohje Hiilidioksidimittari 7787 - Käyttöohje Sisällys Johdanto... 3 Pakkaussisältö... 3 LCD näyttö... 4 Painikkeet... 4 Toiminnot... 5 Käynnistys ja sammutus...
Mikrobilääkkeiden käytön ohjaus infektiokonsultin näkökulmasta mahdollisuudet ja vaikeudet
 Mikrobilääkkeiden käytön ohjaus infektiokonsultin näkökulmasta mahdollisuudet ja vaikeudet Elina Kolho Mikrobilääkkeiden käyttö klassiset interventiot Tavoite: mikrobilääkkeiden käytön vähentäminen resistenssiongelman
Mikrobilääkkeiden käytön ohjaus infektiokonsultin näkökulmasta mahdollisuudet ja vaikeudet Elina Kolho Mikrobilääkkeiden käyttö klassiset interventiot Tavoite: mikrobilääkkeiden käytön vähentäminen resistenssiongelman
Sähköstatiikan laskuissa useat kaavat yksinkertaistuvat hieman, jos vakio C kirjoitetaan muotoon
 30 SÄHKÖVAKIO 30 Sähkövakio ja Coulombin laki Coulombin lain mukaan kahden tyhjiössä olevan pistevarauksen q ja q 2 välinen voima F on suoraan verrannollinen varauksiin ja kääntäen verrannollinen varausten
30 SÄHKÖVAKIO 30 Sähkövakio ja Coulombin laki Coulombin lain mukaan kahden tyhjiössä olevan pistevarauksen q ja q 2 välinen voima F on suoraan verrannollinen varauksiin ja kääntäen verrannollinen varausten
Lämpötilan säätö. S Elektroniset mittaukset Mikko Puranen Luennon sisältö
 Lämpötilan säätö S-108.2010 Elektroniset mittaukset Mikko Puranen 20.2.2006 Luennon sisältö 1. Termodynaaminen malli 2. Jäähdytyksen suunnittelu 3. Peltier-elementit 4. Lämpötilasäätäjät PID-säädin Termodynaaminen
Lämpötilan säätö S-108.2010 Elektroniset mittaukset Mikko Puranen 20.2.2006 Luennon sisältö 1. Termodynaaminen malli 2. Jäähdytyksen suunnittelu 3. Peltier-elementit 4. Lämpötilasäätäjät PID-säädin Termodynaaminen
5. Luento: Rinnakkaisuus ja reaaliaika. Tommi Mikkonen, tommi.mikkonen@tut.fi
 5. Luento: Rinnakkaisuus ja reaaliaika Tommi Mikkonen, tommi.mikkonen@tut.fi Agenda Perusongelmat Jako prosesseihin Reaaliaika Rinnakkaisuus Rinnakkaisuus tarkoittaa tässä yhteydessä useamman kuin yhden
5. Luento: Rinnakkaisuus ja reaaliaika Tommi Mikkonen, tommi.mikkonen@tut.fi Agenda Perusongelmat Jako prosesseihin Reaaliaika Rinnakkaisuus Rinnakkaisuus tarkoittaa tässä yhteydessä useamman kuin yhden
Numeeriset menetelmät
 Numeeriset menetelmät Luento 10 To 6.10.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 10 To 6.10.2011 p. 1/35 p. 1/35 Numeerinen integrointi Puolisuunnikassääntö b a f(x)dx = h 2 (f 0 + f
Numeeriset menetelmät Luento 10 To 6.10.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 10 To 6.10.2011 p. 1/35 p. 1/35 Numeerinen integrointi Puolisuunnikassääntö b a f(x)dx = h 2 (f 0 + f
LADDOMAT MR. Asennus- ja käyttöohje
 LADDOMAT MR Asennus- ja käyttöohje Laddomat MR on erillisellä liitäntäkeskuksella (LK) varustettu säätölaite. Siinä on 3 relettä ja 4 lämpötilatunnistintuloa. Käytettävissä on useita erilaisia ohjausvaihtoehtoja.
LADDOMAT MR Asennus- ja käyttöohje Laddomat MR on erillisellä liitäntäkeskuksella (LK) varustettu säätölaite. Siinä on 3 relettä ja 4 lämpötilatunnistintuloa. Käytettävissä on useita erilaisia ohjausvaihtoehtoja.
ENY-C2001 Termodynamiikka ja lämmönsiirto TERVETULOA!
 ENY-C2001 Termodynamiikka ja lämmönsiirto TERVETULOA! Luento 14.9.2015 / T. Paloposki / v. 03 Tämän päivän ohjelma: Aineen tilan kuvaaminen pt-piirroksella ja muilla piirroksilla, faasimuutokset Käsitteitä
ENY-C2001 Termodynamiikka ja lämmönsiirto TERVETULOA! Luento 14.9.2015 / T. Paloposki / v. 03 Tämän päivän ohjelma: Aineen tilan kuvaaminen pt-piirroksella ja muilla piirroksilla, faasimuutokset Käsitteitä
on hidastuvaa. Hidastuvuus eli negatiivinen kiihtyvyys saadaan laskevan suoran kulmakertoimesta, joka on siis
 Fys1, moniste 2 Vastauksia Tehtävä 1 N ewtonin ensimmäisen lain mukaan pallo jatkaa suoraviivaista liikettä kun kourun siihen kohdistama tukivoima (tässä tapauksessa ympyräradalla pitävä voima) lakkaa
Fys1, moniste 2 Vastauksia Tehtävä 1 N ewtonin ensimmäisen lain mukaan pallo jatkaa suoraviivaista liikettä kun kourun siihen kohdistama tukivoima (tässä tapauksessa ympyräradalla pitävä voima) lakkaa
g-kentät ja voimat Haarto & Karhunen
 g-kentät ja voimat Haarto & Karhunen Voima Vuorovaikutusta kahden kappaleen välillä tai kappaleen ja sen ympäristön välillä (Kenttävoimat) Yksikkö: newton, N = kgm/s Vektorisuure Aiheuttaa kappaleelle
g-kentät ja voimat Haarto & Karhunen Voima Vuorovaikutusta kahden kappaleen välillä tai kappaleen ja sen ympäristön välillä (Kenttävoimat) Yksikkö: newton, N = kgm/s Vektorisuure Aiheuttaa kappaleelle
DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä
 1 DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä JK 23.10.2007 Johdanto Harrasteroboteissa käytetään useimmiten voimanlähteenä DC-moottoria. Tämä moottorityyppi on monessa suhteessa kätevä
1 DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä JK 23.10.2007 Johdanto Harrasteroboteissa käytetään useimmiten voimanlähteenä DC-moottoria. Tämä moottorityyppi on monessa suhteessa kätevä
KARVINGKÄÄNNÖS. Alppihiihdon valmennusseminaari 21.8.2010 MTV3 auditorio, Helsinki. Kilpa- ja huippu-urheilun. tutkimuskeskus
 Kilpa- ja huippu-urheilun tutkimuskeskus KIHU Jyväskylä KARVINGKÄÄNNÖS Tapani Keränen Kilpa- ja huippu-urheilun tutkimuskeskus Ski Sport Finland Suomen Olympiakomitea Alppihiihdon valmennusseminaari 21.8.2010
Kilpa- ja huippu-urheilun tutkimuskeskus KIHU Jyväskylä KARVINGKÄÄNNÖS Tapani Keränen Kilpa- ja huippu-urheilun tutkimuskeskus Ski Sport Finland Suomen Olympiakomitea Alppihiihdon valmennusseminaari 21.8.2010
4A 4h. KIMMOKERROIN E
 TURUN AMMATTIKORKEAKOULU TYÖOHJE 1/5 A h. KIMMOKERROIN E 1. TYÖN TAVOITE 2. TEORIAA Tässä työssä muista töistä poiketen tärkein tavoite on ymmärtää fysikaalisten suureiden keskinäistä riippuvuutta toisistaan
TURUN AMMATTIKORKEAKOULU TYÖOHJE 1/5 A h. KIMMOKERROIN E 1. TYÖN TAVOITE 2. TEORIAA Tässä työssä muista töistä poiketen tärkein tavoite on ymmärtää fysikaalisten suureiden keskinäistä riippuvuutta toisistaan