Automaattinen pesäpallon syöttölaite
|
|
|
- Anita Aaltonen
- 10 vuotta sitten
- Katselukertoja:
Transkriptio
1 AALTO YLIOPISTON TEKNILLINEN KORKEAKOULU Automaattinen pesäpallon syöttölaite AS Automaatio- ja systeemitekniikan projektityöt Tekijät: Reidar Udd 67449W Olli Mäentaka 64376E Dan Anttila 66917W Osasto: Automaatio- ja systeemitekniikka Valvoja: Jussi Suomela Työmäärä: 3 op per tekijä Aloitusajankohta: Lopetusajankohta: Työn tavoitteena on suunnitella ja rakentaa automaattinen pesäpallon syöttölaite. Laite on maksimissaan 30 sentin korkuinen ja syöttölautasen kokoinen. Toiminta on seuraava. Lyöjä pyytää syötön esimerkiksi (jalka)nappia painamalla. Kone odottaa vakioajan + satunnaisajan, jonka jälkeen ampuu pallon ilmaan. Syötön korkeus on sekä säädettävissä vakioksi että asetettavissa satunnaiseksi järkevälle välille. Syöttötarkkuuden on oltava riittävä, jotta pallo pudotessaan osuu takaisin lautaselle. Toimilaite voi olla sähköinen tai pneumaattinen. Sähköisen toimilaitteen on toimittava 12 tai 24 voltin tasavirralla tai 240 voltin vaihtovirralla. Pneumaattisen toimilaitteen on toimittava painealueella 4-9 bar. Työhön kuuluu laitteen suunnittelu, komponenttien hankinta, rakentaminen, laitteen ohjauksen ja toimintojen ohjelmointi, laitteen testaus, demonstrointi sekä työn raportointi. Mekaniikan rakentamisessa saa tarvittaessa tukea Tapio Leppäseltä. Hyväksytyt komponenttihankinnat saa laskuttaa laitokselta. Työn kesto on puoli vuotta ja se soveltuu 2-3 hengen ryhmälle. Työn laajuus on noin 3op/henkilö.
nappia painamalla.")
2 Sisältö 1. Esipuhe Johdanto Fysiikka Teoria Laskut Laitteet Elmo Cello digitaalinen servo-ohjain Maxon harjallinnen 250W sähkömoottori ja planeettavaihde Enkooderi HEDS Solenoidi Jännitelähteet Kytkennät Mekaniikka Varsi ja kiinnityskehikko Latauslaite Ohjelmointi Tulokset Osumatarkkuus Satunnainen heittokorkeus Ajankäyttö Yhteenveto ja loppukommentit Liitteet Fysiikan esimerkkejä eri arvoilla Käytetyt osat Kytkentäkaaviot Ohjelmakoodi kommentoituna Taulukot ajankäytöstä Käyttöohje

3 1. Esipuhe Haluamme kiittää osaston henkilökuntaa heidän antamista tuesta ja neuvoista tätä projektia tehdessä. Erityisesti haluamme kiittää Sami Kielostoa, jolta saimme usein neuvoa elektroniikkaan liittyen, Tapio Leppästä joka auttoi mekaniikan kanssa ja ohjaajaamme Jussi Suomelaa joka järjesti meille tilat ja laitteet Johdanto Tämä dokumentti on kurssiin Automaatio- ja systeemitekniikan projektityöt suoritettavan projektin loppudokumentti. Projektin nimi on Automaattinen pesäpallon syöttölaite ja sen alkuperäinen tehtävänanto on esitetty etusivulla. Projektissa suunnitellaan ja rakennetaan automaattinen pesäpallon syöttölaite. Syöttölaitteen toiminnot ovat pallon heittäminen ilmaan napin painalluksella ja automaattinen seuraavan pallon lataus heittolaitteeseen. Heiton korkeutta säädetään säätövastuksella jonka lisäksi kytkimellä määritetään jos heittokorkeuteen halutaan satunnaisuutta vai ei. Virtalähteinä käytetään neljän jännitelähteen pakettia, jonka kanssa on kytketty rinnan kolme 12 V akkua, joihin sähkömoottori voi syöttää virtaa jarrutuksen yhteydessä. Valmis laite on tehtävänannossa määritettyjä mittoja paljon suurempi. Tämä johtuu käytettävissä olevasta sähkömoottorista sekä sen yhteydessä olevasta vaihteistosta, joka vaatii pitkä varren (1,5 m) heittääkseen pallon tarpeeksi korkealle ilmaan. Muut tehtävänannon vaatimukset on saavutettu. Alla selitetään projektin kaikki osa-alueet.

4 3. Fysiikka Konelukkarin toiminta voidaan mallintaa suhteellisen yksinkertaisesti perusfysiikan avulla. Heittotilanteessa moottori alkaa kääntää heittovartta ala-asennosta ennalta määrätyllä teholla, kunnes heittovarren ollessa vaaka-asennossa, moottori jarruttaa täydellä teholla ja varsi pysähtyy pallon jatkaessa matkaansa suoraan ylöspäin Teoria Moottorinohjainta ohjelmoitaessa moottorille menevälle virralle on asetettu yläraja. Heittotilanteessa moottorille syötetään suhteellisen tasaisesti maksimivirtaa, jolloin moottorin tuottama teho saadaan kaavasta, jossa P on teho, U jännite ja I virta. Koska moottorissamme käytössä olleessa vaihteistossa on suuri välityssuhde, vaihteiston hyötysuhde on huono. Moottorilta vaihteiston kautta varrelle syötetty teho saadaan kaavasta, 4 jossa P out on ulos saatava teho ja hyötysuhde Moottorin hyötykäyttöön tuottama energia sitoutuu konelukkarin eri osiin: Pallon ja varren potentiaalienergiaksi sekä pallon, varren, vaihteiston ja moottorin liike-energiaksi. Potentiaalienergiat saadaan laskettua kaavalla, jossa E on potentiaalienergia, m on massa, g on painovoimavakio ja h korkeusero. Pallon potentiaalienergiaa laskettaessa korkeuserona h on pallon sijainti heiton alussa ja heittovarren ollessa vaaka-asennossa. Varren potentiaalienergiaa laskettaessa korkeusero h on noin puolet palloon verrattuna johtuen painopisteestä. Pallon liike-energia saadaan kaavasta jossa v on nopeus., Nopeutena käytetään pallon nopeutta hetkellä, jolloin heittovarsi on vaakatasossa ja juuri aloittamassa jarrutuksen. Moottorin, vaihteiston ja varren liike-energiat saadaan kaavalla, jossa J on yhteenlaskettu hitausmomentti ja kulmanopeus. Varren hitausmomentti lasketaan kaavalla,

5 5 jossa r on säde. Moottorin ja vaihteiston hitausmomentit ovat saatu valmistajan tuotekatalogista. Kun tiedetään pallon haluttu nousukorkeus, saadaan tarvittava lähtönopeus kaavoista, missä korkeutena h on pallon haluttu nousukorkeus siitä pisteestä, kun heittovarsi on vaakasuorassa ja juuri aloittamassa jarrutuksen. Nyt kun on selvillä energiamäärä joka moottorin tulee tuottaa, sekä teho jolla moottori voi tuottaa energiaa, voidaan kiihdytysaika t laskea kaavalla Koska kiihdytysaika vaikuttaa oleellisesti siihen mikä on kiihdytysmatka asteina ja samalla mikä on tarvittava potentiaalienergia pallolle ja heittovarrelle, ei energiamäärä ole tällä hetkellä vielä tiedossa. Iteroinnilla saadaan kuitenkin laskettua lopullinen kiihdytysmatka heitolle. Todellisuudessa kiihdytysmatka on kuitenkin pidempi, johtuen esimerkiksi siitä että sähkömoottorista ei saada täyttä tehoa alhaisimmilla kierrosnopeuksilla.

6 3.2. Laskut Liitteessä 1 on laskettu lukkarillemme heittokorkeuksia, kiihdytyskorkeuksia ja kiihdytyskulmia erilaisilla moottorin tehoilla, moottorin maksimipyörimisnopeuksilla ja varren pituuksilla. Kuvassa 1 on esitetty havainnekuvan avulla, mitä eri termeillä tarkoitetaan konelukkarin tapauksessa. Laskuissa käytetyt arvot, jotka eivät käy ilmi liitteen taulukosta ovat: - vaihteiston hyötysuhde pallon massa 0.16 kg - varren tiheys 0.32 kg/m - vaihteiston välityssuhde 92.8:1 Eri moottorin tehoilla ja eri pyörimisnopeuksilla laskettujen arvojen on tarkoitus havainnollistaa, kuinka konelukkarin tapauksessa monella eri asialla on paljon merkitystä lopputuloksen kannalta. Laskuissa on siis laskettu sillä teoreettisella olettamuksella, että moottorista saadaan täysi teho koko kiihdytyksen ajalta ja että varsi pysäytetään salamannopeasti sen saavuttaessa vaakatason. Todellisuudessa näin ei kuitenkaan ole, joten tarvittavat kiihdytysmatkat ovat todellisuudessa suurempia ja lukkarin on entistä vaikeampi toteuttaa alkuperäiset vaatimukset koon suhteen. 6 Kuva 1 Fysiikkalaskuissa käytettyjen muuttujien selitykset

7 4. Laitteet Projektityössä käytettiin ainoastaan Automaatio- ja systeemitekniikan osastolla aikaisemmin käytössä olleita laitteita, mistä seurasi että kaikki laitteet eivät olleet optimaaliset tähän projektiin. Näistä tärkeimmät ovat Maxon 250 W sähkömoottori planeettavaihteella ja Elmo moottorinohjain. Uuden pallon lataamista hallitaan solenoidilla. Kaikkien käytössä olleiden laitteiden mallit ja ominaisuudet on esitetty liitteessä Elmo Cello digitaalinen servo-ohjain Moottoria ohjataan Elmo Motion Controlin SimpleIQ sarjan digitaalisella servo-ohjaimella Cello. Cello on älykäs moottorinohjain jonka ominaisuuksiin kuuluu automaattinen PID-parametrien viritys sekä useiden takaisinkytkentöjen, sisääntulojen ja ulostulojen hallinta. Laitteessa on 17 sisäänmenoa ja viisi ulostuloa. Toteutuksessa käytetään neljää sisäänmenoa ja yhtä ulostuloa. 7 Kuva 2 Elmo Motion Control Cello moottorinohjain

8 Kuvassa 2 nähdään Cellon ulkomuoto. Etu-alalla nähdään I/O portit J2 ja J1 sekä toinen kahdesta takaisinkytkentäportista, Feedback A. Näiden kytkennät selitetään alempana. Cellon ohjekirjat ovat ladattavissa Elmo Motion Controlin kotisivuilla osoitteessa Maxon harjallinnen 250W sähkömoottori ja planeettavaihde Projektissa hyödynnetään osastolla aikaisemmin käytössä ollutta harjallista Maxonin valmistamaa 250 W sähkömoottoria. Moottorin tarkka malli ei ole tiedossa. Tätä yritettiin selvittää mittaamalla moottorin sisäinen resistanssi jonka arvoksi saatiin 5,8 Ω. Tarkalleen tätä arvoa vastaavaa mallia ei löydetty Maxonin tuoteluettelosta. Koska emme tienneet tarkalleen kuinka paljon jännitettä moottori kestää, käytimme maksimissaan 36 voltin jännitettä. 8 Moottoriin on kytketty planeettavaihde, jonka mallia ei myöskään tiedetty. Vaihteen välityssuhde selvitettiin antamalla moottorille käsky pyöriä tietty määrä kierroksia ja tarkkailemalla kuinka monta kierrosta akseli tämän seurauksena pyöri. Tuloksia verrattiin Maxonin tuoteluettelossa listattuihin mahdollisiin arvoihin. Tämän perustella välityssuhteen todettiin olevan 92,8:1. Tähän projektiin olisi sopinut paremmin alhaisemmalla välityssuhteella varustettu vaihteisto, koska silloin heittovarren kulmanopeus olisi suurempi Enkooderi HEDS-5540 Moottorin positiosta pidetään kirjaa moottoriin kiinnitetyllä EADS-5540 enkooderilla. Enkooderissa on kaksi kanavaa + indeksikanava. Pulssimäärä kierroksella on Solenoidi Uuden pallon automaattista latausta varten käytetään hieman kallistettua muoviputkea, jonka päälle on asetettu solenoidin kuvan 3 mukaisesti. Solenoidi kytketään ohjauselektroniikan kautta Cellon ulostuloon. Elektroniikasta kerrotaan tarkemmin kappaleessa 5.2.

9 9 Kuva 3 Solenoidi ja sen kiinnitys palloja pitelevään muoviputkeen. Kuvassa 3 on esitetty miten solenoidi on kiinnitetty muoviputkeen. Solenoidin tappia varten on porattu putkeen reikä. Tappiin on kiinnitetty aluslaatta joka estää tappia tippumasta putkeen kokonaan. Kun on aika päästää seuraava pallo kauhaan, solenoidin tappi nousee juuri sopivaksi ajaksi ylös, jotta yksi pallo valuu putkea pitkin kauhaan Jännitelähteet Jännitelähteinä käytetään laboratorio-olosuhteissa neljän jännitelähteen pakettia ja kolmea sarjaan kytkettyä akkua. Nämä on esitetty kuvassa 4 sekä tarkemmin liitteessä 3. Akut toimivat puskureina, joita tarvitaan niin kiihdytyksessä kuin jarrutuksessa. Kiihdyttäessä moottori vaatii enemmän virtaa (10 A) kuin mitä sitä pyörittävät kaksi jännitelähdettä voivat syöttää (yhteensä enintään 5 A), ja silloin loput virrasta otetaan akuista. Jarrutuksessa moottori toimii generaattorina ja syöttää hetkellisesti enintään 10 A. Kyseinen virtaraja on asetettu Celloon ohjelmallisesti. Koska jännitelähteet eivät voi ottaa virtaa vastaan, akut latautuvat.



10 10 Kuva 4 Neljä jännitelähdettä jotka on kytketty rinnan kolmen 12 V akun kanssa. Kytkentäkaavio josta ilmenee, miten Elmo moottorinohjain kytketään akkuihin ja jännitelähteisiin on esitetty liitteessä 3. Samasta liitteestä ilmenee myös sisään- ja ulostulojen kytkennät Kytkennät Elmo mottorinohjaimen kytkemiseksi sähkömoottoriin käytetään kahta takaisinkytkentää, Feedback A ja B. Feeback A on 15 pinninen D-sub ja Feedback B 15 pinninen D-sub high-density. Sisään- ja ulostuloportteja löytyy kaksi; J1 ja J2 joiden molempien tyyppi on 15-pinninen D-Sub high-density. Elmon kytketään RS-232 portin ja RS-232-USB kaapelin avulla tietokoneen USB-porttiin. Nämä portit näkyvät kuvissa 6 ja 7, jotka on kopioitu Cellon manuaalista. Kuva 5 Elmo moottorin ohjaimen yksi sivu, jossa näkyy molemmat I/O portit ja toinen kahdesta takaisinkytkentä-portista


11 11 Kuva 6 Elmo moottorinohjaimen toinen sivu, jossa toinen kahdesta takaisinkytkentä-porteista sekä CANopen ja RS-232 portit. Taulukossa 1 on esitetty miten portit Feedback A ja B kytketään enkooderiin. Taulukon vasemmassa sarakkeessa on esitetty Feedback B:n pinnit ja niiden toiminnot. Taulukkoon on merkitty mitkä ovat sisäänja mitkä ulostuloja. Oikeassa sarakkeessa nähdään, mihin kukin Feedback B:n pinni kytketään. Rivit kuuluvat siis yhteen. Taulukko 1 Feedback A ja B:n sekä enkooderin kytkeminen Feedback B Pinni Toiminto Enkooderi Pinni Toiminto 1 Auxiliary channel A high output 3 Channel A Input 3 Auxiliary channel B high output Output 5 Channel B 8 Encoder supply voltage 4 Vcc 9 Encoder supply voltage return 1 GND Feedback A Pinni Toiminto 6 Buffered channel A output 6 Channel A 7 Buffered channel A complement output 5 Channel A complement Output 11 Buffered channel B output Input 15 Channel B 12 Buffered channel B complement output 14 Channel B complement 13 Buffered Index output 8 Index 15 Supply return 9 Supply return Toteutuksessa on neljä sisäänmenoa joiden avulla ohjataan laitteen toimintaa. Nämä ovat valinta satunnaiselle tai vakiolle heittokorkeudelle, painonappi joka laukaisee heiton, virtakytkin ja analoginen korkeuden säätö. Nämä kaikki on kytketty I/O porttiin J2. Järjestelmässä on yksi porttiin J1 kytketty ulostulo. Näiden porttien pinnit ja niiden toiminnot on esitetty taulukossa 2.

12 12 Taulukko 2 I/O porttien J1 ja J2 kytkennät I/O J1 Pinni Signaali Toiminto 5 Programmable output 3 Solenoidin tapin nosto 10 Programmable output return I/O J2 Pinni Signaali Toiminto 1 Programmable input 5 Moodi; vakio korkeus vai satunnainen 3 Programmable input 6 Lähtökytkin pallon heittämiseksi 4 Programmable input 10 Virtakytkin, oltava päällä jotta pallo heitetään 5 Analog input 1 + Heittokorkeuden säätövastus 6 Programmable input return 5 8 Programmable input return 6 9 Programmable input return Analog input 1 -

13 5. Mekaniikka Lukkarin tärkeimmät osat ovat sähkömoottori, siihen kiinnitetty vaihteisto ja sen akseliin kiinnitetty varsi. Toinen tärkeä osa on muoviputki johon on kiinnitetty solenoidi, joka annostelee palloja syöttökauhaan. Tämän lisäksi laitteeseen kuuluu tralli sekä muutama lauta ja levy, joiden avulla sähkömoottori voidaan kiinnittää pöytälevyyn esimerkiksi ruuvipuristimia käyttäen Varsi ja kiinnityskehikko Hidasta moottori-vaihteisto-yhdistelmää kompensoidaan pitkällä heittovarrella. Näin saadaan tangenttinopeus tarpeeksi suureksi ja pallo lentämään korkealle, huonosta välityssuhteesta huolimatta. Etäisyys moottorin akselista kauhaan on noin 1,5 metriä. Varren kiinnitystä varten osaston mekaanikko Tapio Leppänen rakensi akseliin alumiinisen kiinnikkeen, joka näkyy kuvassa 7. Itse varsi on ilmeisesti osa osastolla aikaisemmin rakennetusta pallopelin maalista. Varsi koostuu kahdesta putkenpalasta jotka on yhdistetty välikappaleella. Välikappaleen takia varsi ei ole täysin jäykkä, vaan elää hieman. Tämä aiheuttaa jonkin verran epätarkkuutta heittoon. Uutta samanlaista vartta etsittiin Etolasta, mutta ei löydetty. Varren päässä on niin ikään välikappale, johon sovitimme juomapullosta tehdyn kauhan. 13 Kuva 7 Varsi on kiinnitetty moottorin akseliin alumiinisen välikappaleen avulla. Varren päässä on kauha, johon pallot laitetaan heittoa varten. Pallot valuvat kauhaan automaattisesti muoviputken ja solenoidin avulla (selitetty alla).

14 14 Kuva 8 Sähkömoottori on asetettu pöydän päällä lepäävälle trallille. Koko systeemi on lukittu paikalleen lautojen, levyn ja ruuvipuristimien avulla. Moottorin akselin on sijaittava tarpeeksi korkealla jotta kiihdytysmatka lattiasta vaakatasoon on riittävän pitkä. Puolentoista metrin varren kanssa sopiva korkeus on hieman pöytäkorkeutta suurempi, jolloin moottori saavuttaa tarpeeksi suuren nopeuden pallon heittämiseksi kattoon asti. Toteutuksessa moottori kiinnitettiin pöydän päälle kuvan 8 mukaisella tavalla. Pöydän päällä oleva tralli nostaa moottoria korkeammalle ja suojaa pöytää vaurioilta. Trallin päälle asetetaan moottori, joka lukitaan paikalleen neljän lankun sekä levyn avulla. Kiinnityksessä käytettiin ruuvipuristimia, jotta laite olisi helppo siirtää muualle projektityön päätyttyä Latauslaite Jotta käyttäjä voisi keskittyä paremmin lyömiseen, tehtiin myös Cellon ohjaama latauslaite. Latauslaite on puurakenteeseen kiinnitetty putki, johon mahtuu kerralla kahdeksan tennispalloa. Laite näkyy ylempänä esitetyssä kuvassa 7. Putki on kallellaan, ja sille on kuusi eri asentoa jolla sen kulma voidaan muuttaa. Putken alapäässä on solenoidi, jonka liikkuva rautasydän on tappi. Tappi on mitoitettu niin, että kun solenoidi on aktivoituna, pallo mahtuu liikkumaan putkessa sen ohi. Solenoidi on kiinnitetty putken päälle, joten kun solenoidi ei ole aktivoituna, tappi putoaa maan vetovoiman avulla ala-asentoonsa. Alaasennossaan tappi on noin 2 cm putken sisäpuolella, ja näin estää putkessa olevia palloja liikkumasta.

15 Solenoidi on aktivoituneena runsaat 200 ms; viimeisessä versiossa koodista se on 225 ms. Sopiva aika löydettiin iteroimalla, mutta se riippuu putken kulmasta sekä putkessa jäljellä olevien pallojen lukumäärästä. Jos kulma on liian jyrkkä, enemmän kuin yksi pallo saattaa ehtiä livahtaa ohi, kun taas pienemmällä kulmalla tappi voi tulla takaisin alas liian nopeasti. Jyrkällä kulmalla pitää myös rajoittaa pallojen lukumäärä, jotta solenoidi jaksaisi nostaa tapin. Latauslaitteen puutteellinen robustisuus ei kuitenkaan ole kriittistä, koska tämä on opiskelijaprojekti eikä ole tarkoitettu valmiiksi tuotteeksi. Solenoidi saa virtansa 12 V jännitelähteestä, ja vaatii tapin nostamiseen enemmän virtaa kuin Cellon digitaaliseen ulostulon läpi voi syöttää. Tästä syystä solenoidia varten piti rakentaa hieman elektroniikkaa, jonka kytkentäkaavio esitetty liitteessä 2. Kytkentöjä varten rakennettiin protolevy joka on esitetty kuvassa 8. Digitaalisen ulostulon virtasilmukassa virtaa ovat rajoittamassa kaksi 1 kω vastusta, jotka samalla tekevät kanavatransistorin ohjausjännitteestä 6 V. Tämä jännite riittää asettamaan kanavatransistorin kyllästystilaan. Kun kanavatransistori on kyllästystilassa, solenoidin virtasilmukka on suljettu ja solenoidi aktivoituu. Solenoidin rinnalla on diodi, joka muodostaa solenoidin kanssa pienemmän silmukan johon solenoidi voi purkautua kun kanavatransistori ei enää vedä. Solenoidin ja diodin sisäiset vastukset kuluttavat solenoidin magneettikenttään varastoidun energian nopeasti. R2 on alasvetovastus, joka varmistaa että kanavatransistori ei johda silloin kuin digitaalinen ulostulo ei ole päällä. 15 Kuva 9 Protolevy solenoidia ohjaavaa ulostuloa varten.

16 6. Ohjelmointi Moottoriohjaimen ohjelmointi on toteutettu valmistajan omalla editorilla, Elmo Studiolla. Elmo Studio on ilmainen työkalu, joka asennetaan Composer ohjelmiston mukana. Studio:ssa on apuvälineet ohjelmien lataamiseen, tarkistamiseen ja virheiden etsintään. Ohjelmointikielen syntaksi muistuttaa C:tä, mutta täydennettynä moottorin ohjaamiseen tarkoitetuilla erikoisfunktioilla. Ohjelmoinnin avuksi Elmo tarjoaa myös manuaalit, tosin jotkut asiat esitettiin harmittavan puutteellisesti. Onneksi niiden tukihenkilöstö vastasi sähköposteihin kiitettävästi, joten tarvittaessa apua oli saatavissa nopeasti. Ohjelma koostuu main-funktiosta sekä sen kutsumista alifunktioista. Main-funktio sisältää ohjelman logiikan ja reagoi käyttäjän antamiin syötteisiin, ja alifunktiot huolehtivat moottorin liikeratojen hallitsemisesta main-funktion antamien parametrien avulla. Ohjelma on näin saatu jaettua helposti ymmärrettäviin osiin, joiden keskinäinen vuorovaikutus on selkeä. Käytännössä ohjelma ajetaan sekvenssissä, jossa kiihdytetään, jarrutetaan, peruutetaan ja ladataan seuraava pallo. Näistä vain kiihdytyksen ja jarrutuksen kesto muuttuu halutun nousukorkeuden, eli lähtönopeuden mukaan; muut osat pysyvät vakioina. Ohjelmassa on kaksi moodia: vakioheitot säädettävällä korkeudella tai sattumanvaraiset heitot. Käyttäjä valitsee moodin on/off-kytkimen avulla, ja moodia voi muuttaa heittojen välillä. Jos valittuna ovat vakioheitot, heittoviive on vakio, mutta analogisen syöttölaitteen asentoa muutamalla voi valita heittokorkeuden viiden eri vaihtoehdon välillä. Vaihtoehtoisessa moodissa ohjelma valitsee heittoviiveen kahden ja neljän sekunnin välillä ja nousukorkeus vaihtelee ohjelmassa asetettujen rajojen sisällä. Nousukorkeuteen vaikutetaan ohjelmassa kiihdytysramppia muuttamalla, koska silloin pallon lähtönopeus ja kineettinen energia voidaan ohjata. Alla oleva kuva 10 esittää ohjelman aktiviteettikaavion. Helpon muokattavuuden saamiseksi ensimmäiseksi ohjelmassa on koottu rajat ohjaamiseen, kuten virralle ja nopeudelle. Main funktion alussa ohjelma asettaa alussa olevien vakioiden arvot raja-arvoiksi liikkumisessa. Se lukee myös moottorin tämänhetkisen sijainnin, ja sen perusteella laskee oikeat sijainnit liikkeen aloittamiseen ja lopettamiseen. Näiden pisteiden avulla moottoriohjain osaa itse tehdä optimaalisin nopeusramppi jolla saavutetaan haluttu sijainti mahdollisimman nopeasti, eli kyseessä on bang-bang -ohjaus. Pallo irtoaa kupista heti kun varsi jarruttaa nopeammin kuin maan vetovoima. Koska halutaan että pallo irtoaa silloin kun varsi on vaakatasossa, varren liikkeen pysähtymispaikka on itse asiassa hieman korkeammalla, jotta jarrutus alkaisi sopivassa kohdassa. Oikea paikka löytyi iteroimalla. Tämä kuitenkin tarkoittaa että jos ajetaan selvästi alhaisemmalla nopeudella, myös jarrutus alkaa myöhemmin jolloin pallo putoaa hieman eri paikassa. Tekemämme testien perusteella (kappale 7), tarkkuus on tehtävänannon mukainen. 16

17 Kuva 10 Ohjelman aktiviteettikaavio 17

18 Tällä hetkellä ohjelma käynnistetään ajamalla main-funktio, joka voidaan helpoiten tehdä Composer ohjelmassa Smart Terminalin kautta. Jos haluaa että ohjelmaa käynnistyy heti kun ohjain kytketään päälle, pitää main-funktio nimetä uudelleen. Valmistaja on nimittäin määrittänyt että autoexec() niminen funktio ajetaan automaattisesti. Koska meidän on tarve muuttaa ja testata koodia nopealla syklillä, tietokoneen avulla ajettava ohjelma oli kätevämpi. Ohjaimen muistissa on tietysti siihen viimeiseksi ladattu koodi, joten hyväksyttyjen lopputestien jälkeen kyseinen muutos olisi ollut perusteltua. Ohjelman enimmäiskoko oli Studiossa 2048 tavua, joka tarkoitti että ominaisuuksien karttuessa kommentit piti vähentää. Tämän vuoksi suoritettavissa koodissa kommentointi voidaan pitää puutteellisena, mutta liitteenä olevan koodi on kommentoitu paremmin helpon luettavuuden saavuttamiseksi. 18

19 19 7. Tulokset 7.1. Osumatarkkuus Pesäpallolukkarimme osumatarkkuutta testattiin suorittamalla useita heittoja eri lähtönopeuksilla ja merkitsemällä kohdat joihin pallot putosivat. Tarkkailtaessa pallojen putoamiskohtia yksittäisellä nopeudella, huomattiin että kaikki osumat osuivat halkaisijaltaan noin 15 cm suuren ympyrän alueelle. Tarkasteltaessa heittojen putoamiskohtia kaikilla testatuilla lähtönopeuksilla, nähtiin että kaikki heitot putosivat noin 60cm x 20cm kokoiselle alueelle. Tämä on esitetty kuvassa 11. Toisin sanoen siirtämällä heittolautanen (halkaisija 60 cm) oikeaan kohtaan, saadaan käytännössä kaikki syötöt osumaan heittolautaselle syötön voimakkuudesta riippumatta, kuten kuvasta 12 ilmenee. Kuva 11 Syöttötestit eri lähtönopeuksilla. Kuva 12 Kaikki syötöt osuvat syöttölautasen sisään.
 oikeaan kohtaan, saadaan käytännössä kaikki syötöt osumaan heittolautaselle syötön voimakkuudesta riippumatta, kuten kuvasta 12 ilmenee.")

20 Erilaiset lähtönopeudet saatiin aikaan käyttämällä potentiometriä eli säätövastusta joka on kytketty Cellon analogia-tuloon. Muuttamalla potentiometrin vastusta, muuttui Cellolle menevä ohjausviesti joka puolestaan muutti ohjelmassa lukkarin heittonopeutta Satunnainen heittokorkeus Eräs valinnainen toiminto pesäpallolukkarissamme on satunnainen heittokorkeus. Tällä voidaan matkia jossain määrin oikeaa pesäpallolukkaria, sillä pesäpallolukkarit eivät todellisuudessa heitä aina samankorkuisia syöttöjä. Kuvassa 13 on esitetty nopeuden ohjausdataa useammassa eri heittotilanteessa. Siitä käy siis ilmi kuinka eri heitot eroavat toisistaan kun valittuna on satunnainen heittokorkeus. 20 Kuva 13 Nopeuden ohjausdata eri heittojen aikana

21 8. Ajankäyttö Kaiken kaikkiaan projektiin kului aikaa hieman yli 80 tuntia per henkilö. Työmäärä jakautui kuvan 14 esittämällä tavalla. Tarkemmat työmäärät henkilöittäin on ilmoitettu liitteessä 5. Alussa paljon aikaa vei erityisesti yhteyden saaminen Cellon ja tietokoneen välille. Vaihdoimme myös käytettävää sähkömoottoria, sillä edellinen oli heikko ja vaihteistossa oli välystä jonka takia moottorinohjaimen virittäminen oli hankalaa. Edellisen moottorin akseliin kiinnitetty teline oli myös epäkäytännöllinen. Alkuun päästyämme aikaa vei osien etsiminen, johdotusten valmistaminen ja ohjelman muuttaminen sitä mukaa kun laitteen ominaisuuksia lisättiin. Aikataulu pysyi kaiken aikaa hyvin hallinnassa. 21 Tutustuminen ja Cellon virittäminen; 10 Lopputestit; 5 Luennot ja esitykset; 12 Fysiikan selvittäminen; 3 Dokumentointi; 10 Cellon ohjelmointi; 8 Lukkarin mekaniikan rakentaminen; 4 Elektroniikka ja johdotukset; 10 Testaus ja säätö; 20 Kuva 14 Työmäärä jaettuna osiin. Työmäärän yksikkö on tässä tunteja per henkilö. Yhteensä 82 tuntia per henkilö.
22 9. Yhteenveto ja loppukommentit Projektityössä rakennettiin laite pesäpallon automaattiseen syöttämiseen. Laitteen ominaisuudet ovat pallon heittäminen ilmaan nappia painamalla ja seuraavan pallon automaattinen asettaminen heittokauhaan. Käyttäjä voi säätää heiton korkeutta sekä määrittää, haluaako hän satunnaisen vai vakiokorkuisen heiton. Projektityön aikana ei törmätty merkittäviin ongelmiin. Syöttölaitteesta tuli pitkän heittovarren johdosta kookas. Kaikki muut tehtävänannossa annetut ominaisuudet saatiin toteutettua. Liitteessä 6 on käyttöohje laitteelle. 22
23 Liitteet Fysiikan esimerkkejä eri arvoilla Mootorin teho (W) Mootorin suurin pyörimisnopeus (rpm) Varren pituus (m) Pallon nousukorkeus (m) Kiihdytyskulma (astetta) Tarvittava kiihdytyskorkeus (m) ,4 0,17 9,6 0, ,8 0,66 10,7 0, ,2 1,5 13 0, ,6 2, , ,15 23,3 0, ,4 0,37 32,4 0, ,8 1,5 36,6 0, ,2 3,36 44,9 0, ,6 5, , ,4 0,66 76,9 0, ,8 2,66 86,5 0, ,2 5,98 104,8 1, ,4 0,17 4,8 0, ,8 0,66 5,3 0, ,2 1,5 6,3 0, ,6 2,66 8,2 0, ,15 10,9 0, ,4 0,37 16,1 0, ,8 1,5 17,9 0, ,2 3,36 21,7 0, ,6 5,98 28,1 0, ,4 0,66 38,2 0, ,8 2,66 42,7 0, ,2 5,98 51,8 0,94
24 Käytetyt osat Alla on listattu projektissa käytetyt osat ja niiden tiedot, mikäli nämä ovat tiedossa. Moottori: Maxon DC motor, harjallinen, 250W, 36V Enkooderi: HP HEDS 5540, 500 CPT Vaihteisto: Planeettavaihteisto, n=92.8:1 Moottoriohjain: Elmo Cello 30/60 4x Jännitelähteet: Velleman, 30V, 2.5 A Akut: 2x Europower EP 5-12 (12V, 5 AH), Huanyu HYS1240 (12V, 4AH) Solenoidi: Tuntematon (12V) 2x kytkin 1x painike Säätövastus Diodi 2x 1 kω vastus Kanavatransistori: (MOSFET, N-tyyppi) 2SK2232 Varsi: 150 cm, muovia Kuppi: 1.5L PET pullo (suuosa)
25 10.3. Kytkentäkaaviot 25
26 Ohjelmakoodi kommentoituna ##AALTO #define maxspeed //pulses per seconds (=3300rpm). Gear max 3000 rpm, #define returnspeed #define maxacc //pulses per seconds^2. High enough to hit current limits #define maxdec #define loadtime 225 //In ms #define climit 10; //Current peak limit #define climittime 3; //Peak limit time allowed in seconds function MakeThrow (int MKpoint, int MKspeed) //full acc until wanted speed mo=1; SP=MKspeed; //Sets the speed for the next movement PA=MKpoint; //Point-to-point movement using specified speed BG; until(ms==0); //Wait until the motion stops wait 50; //Wait some more for final stabilization return function ToStart (int RTSpoint, int RTSspeed) //go to home position SP=RTSspeed; PA=RTSpoint; //could also be jog until a switch BG; until(ms==0); //Wait until the motion stops wait 1000; //Wait until the rod stops shaking return function LoadBall(int time) OB[3]=1; //Activates solenoid (lets one ball pass by) wait time; OB[3]=0; return function main() int l, random, systime, homepos, lowpos, highpos, level; //Sets the limits specified at the top of the program SP=maxSpeed; AC=maxAcc; DC=maxDec; PL[1]=cLimit; //Current peak limit PL[2]=climitTime; //Peak limit time allowed HL[2]=150000; //Velocity limit LL[2]= ; //Velocity limit (backwards) HL[3]= ; //Position limit LL[3]= ; UM=5; //Single loop position control (Cello can support five modes, depending on sensor configuration) ol[3]=1; //Sets the output 3 logic to high (1=on) ob[3]=0; //Makes sure the solenoid is down mo=1; //Turns on the motor
27 homepos=px; //Read position from main encoder lowpos=homepos+1500; //Lifts it off the ground (used as reference) highpos=lowpos+13000; //Horizontal position ToStart(lowpos,3000); //Moves slowly to the start position while(ip >= ) //Checks that main switch is ON if(ip == ) //Main switch, boring=0 (Mode), launch button ON systime=tm; //Generates a random number depending on system clock random=systime%200; if(random<0) random=-random; end wait (2000); for l=0:random wait 10; //Adds a random delay to the static two sec. end MakeThrow(highpos,maxSpeed random*225); //Uses reduced velocity ToStart(lowpos,returnSpeed); LoadBall(loadTime); elseif(ip == ) //Main switch, boring=1 (Mode), launch button ON wait (2000); if(an[1]>9) //Checks the reading from the analog input level=5; elseif(an[1]>7) level=6; elseif(an[1]>5.5) level=7; elseif(an[1]>4.6) level=8; else level=10; end MakeThrow(highpos,(maxSpeed/10)*level); //Velocity depends on AN ToStart(lowpos,returnSpeed); //Return to start LoadBall(loadTime); // Load next ball end 27 end// Continues the while loop mo=0; //Shuts down the motor return
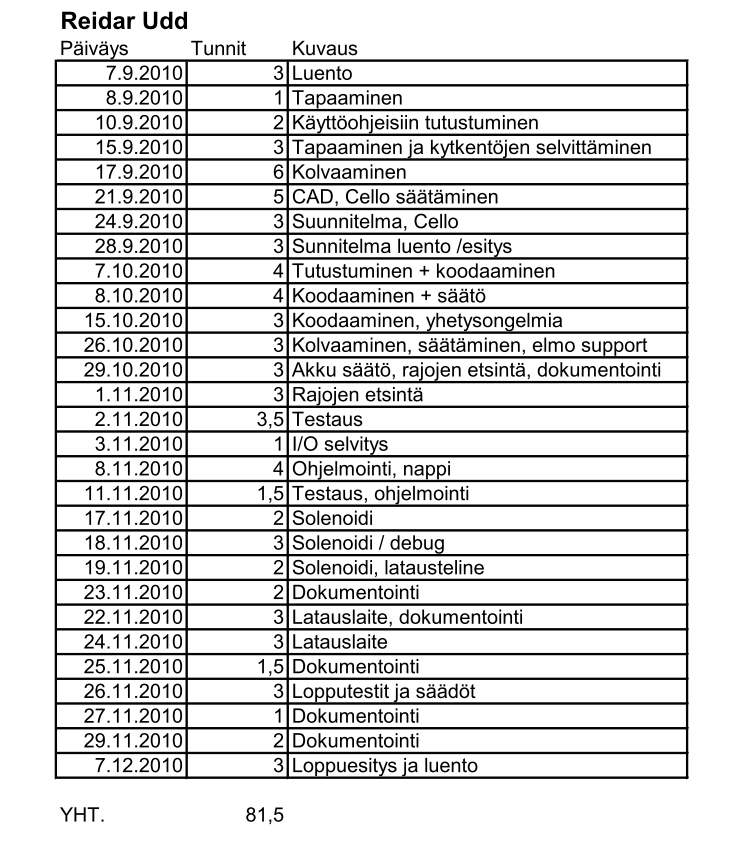
28 Taulukot ajankäytöstä Dan Anttila Päiväys Tunnit Kuvaus Luento: Aiheisiin tutustuminen ja aiheen valinta Tarvittavien osien keräily, piuhojen kytkentöjen määrittely Piuhojen tekeminen/kolvaus, cello tietokoneeseen kiinni Cellon ja moottorin testausta, suunnitelman tekemistä Cellon viritystä, PI-arvojen haussa ei onnistuttu Dokumentointia Tapaaminen Suomelan kanssa, cellon viritystä Suunnitelman hiominen, esitys ja luento Uusi moottori ja vaihteisto: Speksien hakemista. Ei vieläkään PItermejä ohjaimelle Moottorin testailua ja viritystä Akkujen kytkentöjen tekeminen Lukkarin alustan ja varren pidikkeen rakentamisen 1 ohjeistaminen Väliraportin teko Lukkarin testausta-> pallo 1,5m korkeuteen Pallo 2 m korkeuteen, nappien kytkeminen celloon, väliraportti 7 ja luento Napit toimimaan ohjelmassa ja käytännössä Dokumentointia AI-säädin elmoon (potentiometri) Loppudokumentin tekoa Pallotelineen rakentaminen, solenoidin kiinnittäminen, testaus Loppudokumentin tekoa, laitteiston viilailua Lopputestit, loppudokumentin tekoa Loppudokumentoinita Loppudokumentointia Esitys ja muiden esitysten kuuntelu. YHT 81
29 29 Olli Mäentaka Päiväys Tunnit Kuvaus Luento: Aiheisiin tutustuminen ja aiheen valinta Tapaaminen Jussi Suomelan kanssa ja aiheeseen sekä laitteistoon tutustuminen Konelukkarin fysiikan selvittämistä Tarvittavien osien keräily, piuhojen kytkentöjen määrittely Piuhojen tekeminen/kolvaus, cello tietokoneeseen kiinni Cellon ja moottorin testausta, suunnitelman tekemistä Cellon viritystä, PI-arvojen haussa ei onnistuttu Dokumentointi/tehtäväverkko, fysiikkalaskuri valmiiksi Tapaaminen Suomelan kanssa, cellon viritystä Suunnitelman hiominen, esitys ja luento Uusi moottori ja vaihteisto: Speksien hakemista. Ei vieläkään PItermejä ohjaimelle Moottorin testailua ja viritystä Akkujen kytkentöjen tekeminen Lukkarin alustan ja varren pidikkeen rakentamisen ohjeistaminen Väliraportin teko Lukkarin testausta-> pallo 1,5m korkeuteen Pallo 2 m korkeuteen, nappien kytkeminen celloon, väliraportti ja luento Napit toimimaan ohjelmassa ja käytännössä Loppudokumentin tekoa: Fysiikka ja sähkökytkennät AI-säädin elmoon (potentiometri) Loppudokumentin tekoa Loppudokumentin tekoa, laitteiston viilailua Lopputestit, loppudokumentin tekoa Loppudokumentin tekoa Loppuesitys ja luento YHT 80
30 30

31 10.6. Käyttöohje Tarkista aluksi että tarvittavat kytkennät ovat oikein, tämän dokumentin mukaisesti. Kytke myös jännitelähteet päälle ja akkukaapelit kiinni, ja varmista että varsi on oikeassa asennossa nojaten lattiaan. 1. Käynnistä Composer ohjelma Windowsissa, ja valitse Open Communication Directly (kuva 15). Muuta tarvittaessa yhteysasetukset, ja paina Next (kuva 16). 31 Kuva 15 Aloitusvalikko Kuva 16 Yhteyden muodostus Celloon

32 2. Jos yhteyden ottaminen onnistui, näet Smart Terminal (kuva 17), jonka avulla voit lähettää ohjaimelle komentoja. 3. Samassa kuvassa on osoitettu nuolella mistä Studio ohjelmointityökalu käynnistetään. Paina kuvaketta ja avaa haluttu ohjelma. Jos olet varma että ohjaimessa on vielä oikea ohjelma ladattu, voit hypätä tämän vaiheen yli. Studio 32 Kuva 17 Elmo Composer - Smart Terminal 4. Tarkista että koodi on oikein, jonka jälkeen voit ladata se Celloon; nuoli kuvassa 18. Ruudun alareunasta voit seurata prosessia.
33 33 Lataa ohjaimelle Kuva 18 Elmo Studio 5. Jos lataaminen onnistui, voit nyt palata Smart Terminal -ikkunaan, ja käynnistää ohjelmaa antamalla komennon xq##main(). Varsi nousee heiton alkuasentoon, ja jos sinulla on pääkytkin ON asennossa, myös jää siihen asentoon odottamaan laukaisukomentoa. HUOM: Jos main()-funktion nimen muuttaa autoexec():ksi, ohjelma käynnistyy automaattisesti kun moottoriohjaimelle kytketään virta. 6. Voit vaihtaa satunnaisten ja vakioheittojen välillä moodivalitsimella; 1 tarkoittaa vakioheittoja ja 0 satunnaisia. Heittotapaan voit vaikuttaa joka heiton jälkeen, ilman uudelleenkäynnistämistä. 7. Heittonapilla laite käynnistää heittosekvenssin, jota edeltää heittotavasta riippuvainen viive (2-4 sekuntia). 8. Kun moottori on saavuttanut yläasentonsa, se palaa alkuun, ja samalla lataa seuraavan pallon, jos latauslaitteessa on vielä palloja jäljellä. 9. Voit sammuttaa moottorin asettamalla pääkytkin OFF asentoon, jolloin varsi laskeutuu takaisin maahan. Tämä tapahtuu vain jos moottori on alkuasennossa, eli varsi on lähellä maata. 10. Voit nyt sulkea Composer ohjelman, sammuttaa jännitelähteet ja kytkeä akut irti.
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt. Projektisuunnitelma. A10-14 Automaattinen pesäpallolukkari
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Projektisuunnitelma A10-14 Automaattinen pesäpallolukkari Dani Anttila Olli Mäentaka Reidar Udd 9/21/2010 Määritellään projektin tavoite, aikataulu
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Projektisuunnitelma A10-14 Automaattinen pesäpallolukkari Dani Anttila Olli Mäentaka Reidar Udd 9/21/2010 Määritellään projektin tavoite, aikataulu
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt. Väliraportti. A10-14 Automaattinen pesäpallolukkari
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A10-14 Automaattinen pesäpallolukkari Dani Anttila Olli Mäentaka Reidar Udd 10/31/2010 Projektisuunnitelma päivitetty sisältämään tietoa projektin
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A10-14 Automaattinen pesäpallolukkari Dani Anttila Olli Mäentaka Reidar Udd 10/31/2010 Projektisuunnitelma päivitetty sisältämään tietoa projektin
LUMA SUOMI -kehittämisohjelma LUMA FINLAND -utvecklingsprogram LUMA FINLAND development programme Ohjelmointia Arduinolla
 Ohjelmointia Arduinolla Kyösti Blinnikka, Olarin koulu ja lukio LUMA-keskus Aalto Mikä on Arduino? Open Source Electronics Prototyping Platform Arduino on avoimeen laitteistoon ja ohjelmistoon perustuva
Ohjelmointia Arduinolla Kyösti Blinnikka, Olarin koulu ja lukio LUMA-keskus Aalto Mikä on Arduino? Open Source Electronics Prototyping Platform Arduino on avoimeen laitteistoon ja ohjelmistoon perustuva
3.4 Liike-energiasta ja potentiaalienergiasta
 Työperiaatteeksi (the work-energy theorem) kutsutaan sitä että suljetun systeemin liike-energian muutos Δ on voiman systeemille tekemä työ W Tämä on yksi konservatiivisen voiman erityistapaus Työperiaate
Työperiaatteeksi (the work-energy theorem) kutsutaan sitä että suljetun systeemin liike-energian muutos Δ on voiman systeemille tekemä työ W Tämä on yksi konservatiivisen voiman erityistapaus Työperiaate
FYSIIKAN HARJOITUSTEHTÄVIÄ
 FYSIIKAN HARJOITUSTEHTÄVIÄ MEKANIIKKA Nopeus ja keskinopeus 6. Auto kulkee 114 km matkan tunnissa ja 13 minuutissa. Mikä on auton keskinopeus: a) Yksikössä km/h 1. Jauhemaalaamon kuljettimen nopeus on
FYSIIKAN HARJOITUSTEHTÄVIÄ MEKANIIKKA Nopeus ja keskinopeus 6. Auto kulkee 114 km matkan tunnissa ja 13 minuutissa. Mikä on auton keskinopeus: a) Yksikössä km/h 1. Jauhemaalaamon kuljettimen nopeus on
Aurinko-C20 asennus ja käyttöohje
 Aurinko-C20 laitetelineen asennus ja käyttö Laitetelineen osat ja laitteet:. Kääntyvillä pyörillä varustettu laiteteline. Laitteet on kiinnitetty ja johdotettu telineeseen (toimitetaan akut irrallaan).
Aurinko-C20 laitetelineen asennus ja käyttö Laitetelineen osat ja laitteet:. Kääntyvillä pyörillä varustettu laiteteline. Laitteet on kiinnitetty ja johdotettu telineeseen (toimitetaan akut irrallaan).
CROSSTRAINER (Model E 7000P)
") CROSSTRAINER (Model E 7000P) Kuva 1 Poista pultit (C4) tiivisterenkaat (C5) ja mutterit (C6) takavakaajasta (C). Laita kaksi pulttia (C4) takavakaajan läpi, kiinnittääksesi kannattimen laitteeseen (A),
CROSSTRAINER (Model E 7000P) Kuva 1 Poista pultit (C4) tiivisterenkaat (C5) ja mutterit (C6) takavakaajasta (C). Laita kaksi pulttia (C4) takavakaajan läpi, kiinnittääksesi kannattimen laitteeseen (A),
Apollo SPEEDY Syöttölaite
 Perkkoonkatu 5 Puh. 010 420 72 72 www.keyway.fi 33850 Tampere Fax. 010 420 72 77 [email protected] Apollo SPEEDY Syöttölaite PLC - Ohjaus Askelmoottori Syöttö pituus : 1 12 m Vahva, alumiini rakenne Moottori
Perkkoonkatu 5 Puh. 010 420 72 72 www.keyway.fi 33850 Tampere Fax. 010 420 72 77 [email protected] Apollo SPEEDY Syöttölaite PLC - Ohjaus Askelmoottori Syöttö pituus : 1 12 m Vahva, alumiini rakenne Moottori
Peltorobotin akselimoduulin kontrolleri
 Peltorobotin akselimoduulin kontrolleri Automaatio- ja systeemitekniikan projektityöt B.Sc. Joni Rannisto (Mech.) Janne Hafrén (Mech.) Matti Koskinen (Mech.) Esitelmän rakenne 1. Tehtävänanto ja vaatimukset
Peltorobotin akselimoduulin kontrolleri Automaatio- ja systeemitekniikan projektityöt B.Sc. Joni Rannisto (Mech.) Janne Hafrén (Mech.) Matti Koskinen (Mech.) Esitelmän rakenne 1. Tehtävänanto ja vaatimukset
Kannettava DVD soitin Daewoo DPC-7200PD
 Kannettava DVD soitin Daewoo DPC-7200PD Laitteeseen tutustuminen: Yläkuva laitteesta 1. LCD panelin sammutus kytkin 2. Laajakuva 3. Pysäytys 4. Edellinen 5. Seuraava 6. Toista 7. Valikko painike Nuolinäppäimet:
Kannettava DVD soitin Daewoo DPC-7200PD Laitteeseen tutustuminen: Yläkuva laitteesta 1. LCD panelin sammutus kytkin 2. Laajakuva 3. Pysäytys 4. Edellinen 5. Seuraava 6. Toista 7. Valikko painike Nuolinäppäimet:
KON C3004 14.10.2015 H03 Ryhmä G Samppa Salmi, 84431S Joel Tolonen, 298618. Koesuunnitelma
 KON C3004 14.10.2015 H03 Ryhmä G Samppa Salmi, 84431S Joel Tolonen, 298618 Koesuunnitelma Sisällysluettelo Sisällysluettelo 1 1 Tutkimusongelma ja tutkimuksen tavoit e 2 2 Tutkimusmenetelmät 3 5 2.1 Käytännön
KON C3004 14.10.2015 H03 Ryhmä G Samppa Salmi, 84431S Joel Tolonen, 298618 Koesuunnitelma Sisällysluettelo Sisällysluettelo 1 1 Tutkimusongelma ja tutkimuksen tavoit e 2 2 Tutkimusmenetelmät 3 5 2.1 Käytännön
- Käyttäjä voi valita halutun sisääntulon signaalin asetusvalikosta (esim. 0 5V, 0 10 V tai 4 20 ma)
") LE PSX DIN kisko kiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 3 numeron LED näyttö - Selkeä rakenne, yksinkertainen käyttää
LE PSX DIN kisko kiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 3 numeron LED näyttö - Selkeä rakenne, yksinkertainen käyttää
KÄYTTÖOHJE PEL 1000 / PEL 1000-M
 V1.0 (19.02.2015) 1 (8) KÄYTTÖÖNOTTO Asennus - Lähetin tulisi asentaa mittauskohdan yläpuolelle kondensoitumisongelmien välttämiseksi. - Kanavan ylipaine mitataan siten, että kanavan mittayhde yhdistetään
V1.0 (19.02.2015) 1 (8) KÄYTTÖÖNOTTO Asennus - Lähetin tulisi asentaa mittauskohdan yläpuolelle kondensoitumisongelmien välttämiseksi. - Kanavan ylipaine mitataan siten, että kanavan mittayhde yhdistetään
Megatunen käyttö. Asenna megatune koneelle MsExtra-sivuilta: http://www.msextra.com/manuals/ms_extra_manual_index.htm
 Megatunen käyttö Asenna megatune koneelle MsExtra-sivuilta: http://www.msextra.com/manuals/ms_extra_manual_index.htm Avaa Megatune ja File valikosta configurator. Sieltä asennetaan perusasetukset. Koodin
Megatunen käyttö Asenna megatune koneelle MsExtra-sivuilta: http://www.msextra.com/manuals/ms_extra_manual_index.htm Avaa Megatune ja File valikosta configurator. Sieltä asennetaan perusasetukset. Koodin
Aurinko-R10 asennus ja käyttöohje
 EI NÄIN ESIM NÄIN Aurinko-R10 Aurinkopaneelin asennus ja kytkentä Asenna aurinkopaneeli avoimelle paikalle kohti etelää (välillä itä länsi) ja kallista kohti keskipäivän aurinkoa. Tuoton kannalta 25..
EI NÄIN ESIM NÄIN Aurinko-R10 Aurinkopaneelin asennus ja kytkentä Asenna aurinkopaneeli avoimelle paikalle kohti etelää (välillä itä länsi) ja kallista kohti keskipäivän aurinkoa. Tuoton kannalta 25..
Lataussäädin 12/24V 10A. Käyttöohje
 Lataussäädin 12/24V 10A Käyttöohje 1 Yleistä Lataussäätimessä on näyttö ja sen latausmenetelmä on 3-vaiheinen PWM lataus. Siinä on myös kaksi USB liitintä pienten laitteiden lataamiseen. 2 Kytkentäkaavio
Lataussäädin 12/24V 10A Käyttöohje 1 Yleistä Lataussäätimessä on näyttö ja sen latausmenetelmä on 3-vaiheinen PWM lataus. Siinä on myös kaksi USB liitintä pienten laitteiden lataamiseen. 2 Kytkentäkaavio
Aurinko-C20 V asennus ja käyttöohje
 Aurinko-C20 V asennus ja käyttö Laitetelineen osat ja laitteet:. Kääntyvillä pyörillä varustettu laiteteline. Laitteet on kiinnitetty ja johdotettu telineeseen (toimitetaan akut irrallaan). 2. Akut. Kaksi
Aurinko-C20 V asennus ja käyttö Laitetelineen osat ja laitteet:. Kääntyvillä pyörillä varustettu laiteteline. Laitteet on kiinnitetty ja johdotettu telineeseen (toimitetaan akut irrallaan). 2. Akut. Kaksi
- Käyttäjä voi valita halutun sisääntulon signaalin asetusvalikosta (esim. 0 5V, 0 10 V tai 4 20 ma)
") LE PDX DIN kiskokiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 4 numeroinen LED näyttö - Selkeä rakenne, yksinkertainen käyttää
LE PDX DIN kiskokiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 4 numeroinen LED näyttö - Selkeä rakenne, yksinkertainen käyttää
SUMO-ROBOTTI. Tehtävä
 SUMO-ROBOTTI Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla yksinkertainen Sumorobotti. Robotti ohjelmoidaan liikkumaan autonomisesti (ilman ohjausta) ja tunnistamaan mustan ottelualustan
SUMO-ROBOTTI Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla yksinkertainen Sumorobotti. Robotti ohjelmoidaan liikkumaan autonomisesti (ilman ohjausta) ja tunnistamaan mustan ottelualustan
HUOMAUTUS! Älä kytke Cometia USB-kaapelilla tietokoneeseesi, kun lataat satunnaiskoodeilla.
 RAHAN LATAAMINEN COMET-MAKSULAITTEESEEN SATUNNAISKOODEJA KÄYTTÄMÄLLÄ HUOMAUTUS! Älä kytke Cometia USB-kaapelilla tietokoneeseesi, kun lataat satunnaiskoodeilla. Voit käyttää Comet maksulaitteen lataamista
RAHAN LATAAMINEN COMET-MAKSULAITTEESEEN SATUNNAISKOODEJA KÄYTTÄMÄLLÄ HUOMAUTUS! Älä kytke Cometia USB-kaapelilla tietokoneeseesi, kun lataat satunnaiskoodeilla. Voit käyttää Comet maksulaitteen lataamista
Elektroniikan perusteet, Radioamatööritutkintokoulutus
 Elektroniikan perusteet, Radioamatööritutkintokoulutus Antti Karjalainen, PRK 14.11.2013 Komponenttien esittelytaktiikka Toiminta, (Teoria), Käyttö jännite, virta, teho, taajuus, impedanssi ja näiden yksiköt:
Elektroniikan perusteet, Radioamatööritutkintokoulutus Antti Karjalainen, PRK 14.11.2013 Komponenttien esittelytaktiikka Toiminta, (Teoria), Käyttö jännite, virta, teho, taajuus, impedanssi ja näiden yksiköt:
135 & 145 sarja. Väärennetyn rahan tunnistin. Manuaalinen
 135 & 145 sarja Väärennetyn rahan tunnistin Manuaalinen Käyttöohje Safescan 135i, 135ix & 145ix Väärennetyn rahan tunnistin Onnittelut Safescan 135i, 135ix tai 145ix väärennetyn rahan tunnistimen hankinnan
135 & 145 sarja Väärennetyn rahan tunnistin Manuaalinen Käyttöohje Safescan 135i, 135ix & 145ix Väärennetyn rahan tunnistin Onnittelut Safescan 135i, 135ix tai 145ix väärennetyn rahan tunnistimen hankinnan
Phantom / H3-3D Gimbal Kalibrointiohjeet. Aloitus:
 Phantom / H3-3D Gimbal Kalibrointiohjeet - Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset - IMU kalibrointi
Phantom / H3-3D Gimbal Kalibrointiohjeet - Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset - IMU kalibrointi
TigerStop Standard Digitaalinen Syöttölaite / Stoppari
 Perkkoonkatu 5 Puh. 010 420 72 72 www.keyway.fi 33850 Tampere Fax. 010 420 72 77 [email protected] TigerStop Standard Digitaalinen Syöttölaite / Stoppari Malli Työpituus Kokonaispituus Standardi mm mm
Perkkoonkatu 5 Puh. 010 420 72 72 www.keyway.fi 33850 Tampere Fax. 010 420 72 77 [email protected] TigerStop Standard Digitaalinen Syöttölaite / Stoppari Malli Työpituus Kokonaispituus Standardi mm mm
a) Kuinka pitkän matkan punnus putoaa, ennen kuin sen liikkeen suunta kääntyy ylöspäin?
 Kuinka pitkän matkan punnus putoaa, ennen kuin sen liikkeen suunta kääntyy ylöspäin?") Luokka 3 Tehtävä 1 Pieni punnus on kiinnitetty venymättömän langan ja kevyen jousen välityksellä tukevaan kannattimeen. Alkutilanteessa punnusta kannatellaan käsin, ja lanka riippuu löysänä kuvan mukaisesti.
Luokka 3 Tehtävä 1 Pieni punnus on kiinnitetty venymättömän langan ja kevyen jousen välityksellä tukevaan kannattimeen. Alkutilanteessa punnusta kannatellaan käsin, ja lanka riippuu löysänä kuvan mukaisesti.
Ole hyvä ja lue tämä käyttöohje ennen käyttöönottoa
 Käyttöohje LANGATON ÄÄNIJÄRJESTELMÄ Ole hyvä ja lue tämä käyttöohje ennen käyttöönottoa 1 OSIEN SIJAINTI 1. DISKANTTITASON SÄÄTÖ 9. TASAVIRRAN SISÄÄNTULO 2. BASSONTASON SÄÄTÖ 10. AUX SISÄÄNTULO 3,5MM LIITIN
Käyttöohje LANGATON ÄÄNIJÄRJESTELMÄ Ole hyvä ja lue tämä käyttöohje ennen käyttöönottoa 1 OSIEN SIJAINTI 1. DISKANTTITASON SÄÄTÖ 9. TASAVIRRAN SISÄÄNTULO 2. BASSONTASON SÄÄTÖ 10. AUX SISÄÄNTULO 3,5MM LIITIN
Comet pysäköintimittarin asennus ja kytkeminen tietokoneeseesi (Windows XP) USB-kaapelilla.
 USB-kaapelilla.") Comet pysäköintimittarin asennus ja kytkeminen tietokoneeseesi (Windows XP) USB-kaapelilla. HUOM! TÄMÄ OHJE ON COMET LAITTEEN ENSIMMÄISTÄ ASENNUSKERTAA VARTEN. Ladataksesi rahaa Comet pysäköintimittariisi
Comet pysäköintimittarin asennus ja kytkeminen tietokoneeseesi (Windows XP) USB-kaapelilla. HUOM! TÄMÄ OHJE ON COMET LAITTEEN ENSIMMÄISTÄ ASENNUSKERTAA VARTEN. Ladataksesi rahaa Comet pysäköintimittariisi
AquaPro IP 54. Laser 635 nm. auto man man DE 02 GB 09 NL 16 DK 23 FR 30 ES 37 IT 44 PL 51 FI 58 PT 65 SE 72 NO 79 TR 86 RU 93 UA 100 CZ 107 EE 114
 Laser 635 nm IP 54 auto man man AquaPro DE 02 GB 09 NL 16 DK 23 FR 30 ES 37 IT 44 PL 51 58 PT 65 SE 72 NO 79 TR 86 RU 93 UA 100 CZ 107 EE 114 LV 121 LT 128 RO 135 BG 142 GR 149 58 Lue käyttöohje kokonaan.
Laser 635 nm IP 54 auto man man AquaPro DE 02 GB 09 NL 16 DK 23 FR 30 ES 37 IT 44 PL 51 58 PT 65 SE 72 NO 79 TR 86 RU 93 UA 100 CZ 107 EE 114 LV 121 LT 128 RO 135 BG 142 GR 149 58 Lue käyttöohje kokonaan.
SANYO TRC-8800 / 8080 SANELU- JA SANELUN PURKULAITE
 SANYO TRC-8800 / 8080 SANELU- JA SANELUN PURKULAITE 2 KYTKIMET (kuva 1) 1. Kasettipesän kansi 2. Kasettipesän avaus (EJECT) 3. Nauhalaskuri ja nollauspainike (COUNTER/RESET) 4. Takaisinsiirto säätö (BACKSPACE)
SANYO TRC-8800 / 8080 SANELU- JA SANELUN PURKULAITE 2 KYTKIMET (kuva 1) 1. Kasettipesän kansi 2. Kasettipesän avaus (EJECT) 3. Nauhalaskuri ja nollauspainike (COUNTER/RESET) 4. Takaisinsiirto säätö (BACKSPACE)
OMNIA OPINNÄYTETYÖ AMMATTIOPISTO. Diginoppa ICTP09SLG OMNIAN AMMATTIOPISTO
 OMNIA AMMATTIOPISTO OPINNÄYTETYÖ Diginoppa ICTP09SLG - 2012 OMNIAN AMMATTIOPISTO KOULUTUSALA Tieto- ja tietoliikennetekniikka OPISKELIJA Hannu Junno OHJAAJA Jari Laurila VUOSI 2012 2 TIIVISTELMÄ Opinnäytetyöni
OMNIA AMMATTIOPISTO OPINNÄYTETYÖ Diginoppa ICTP09SLG - 2012 OMNIAN AMMATTIOPISTO KOULUTUSALA Tieto- ja tietoliikennetekniikka OPISKELIJA Hannu Junno OHJAAJA Jari Laurila VUOSI 2012 2 TIIVISTELMÄ Opinnäytetyöni
WBelectronics. Infinity USB Phoenix - Käyttöohje
 WBelectronics Infinity USB Phoenix - Käyttöohje Johdanto Laitteen asentaminen Onneksi olkoon Infinity USB Phoenix -laitteen hankinnasta! Infinity kytketään toimintaan kolmessa vaiheessa: 1) Asenna laite
WBelectronics Infinity USB Phoenix - Käyttöohje Johdanto Laitteen asentaminen Onneksi olkoon Infinity USB Phoenix -laitteen hankinnasta! Infinity kytketään toimintaan kolmessa vaiheessa: 1) Asenna laite
P6SLite ohjaus- ja zoom komennot
 1, Ohjaus zoom -toiminnot P6SLite ohjaus- ja zoom komennot Osa 1 pikanäppäintoiminnon Valitse APP-käyttöliittymää ja APP ilmestyy toimintopainikkeeseen. Paina + = ZOOM +, paina - = ZOOM-. 2, Manuaalinen
1, Ohjaus zoom -toiminnot P6SLite ohjaus- ja zoom komennot Osa 1 pikanäppäintoiminnon Valitse APP-käyttöliittymää ja APP ilmestyy toimintopainikkeeseen. Paina + = ZOOM +, paina - = ZOOM-. 2, Manuaalinen
Asennusohje. EasyLine GSM
 Asennusohje EasyLine GSM Laitteen kuvaus EasyLine GSM on puhelinlijasimulaattori, joka simuloi analogista PSTN linjaa GSM verkossa ja sitä voidaan käyttää ContactID protokollan lähettämiseen hälytinjärjestelmiltä.
Asennusohje EasyLine GSM Laitteen kuvaus EasyLine GSM on puhelinlijasimulaattori, joka simuloi analogista PSTN linjaa GSM verkossa ja sitä voidaan käyttää ContactID protokollan lähettämiseen hälytinjärjestelmiltä.
Ulkoasu. 1.Objektiivi 2.Tallennuspainike 3.Kuvien ottopainike _ FIN 01
 Ulkoasu 3 2 1 1.Objektiivi 2.Tallennuspainike 3.Kuvien ottopainike FIN 01 13 4.Micro-USB-portti 10 12 11 6 7 8 9 4 5 5.Akun virtakytkin 6.Sivu ylös -painike 7.Virtapainike 8.OK-painike 9.Sivu alas -painike
Ulkoasu 3 2 1 1.Objektiivi 2.Tallennuspainike 3.Kuvien ottopainike FIN 01 13 4.Micro-USB-portti 10 12 11 6 7 8 9 4 5 5.Akun virtakytkin 6.Sivu ylös -painike 7.Virtapainike 8.OK-painike 9.Sivu alas -painike
Kauko-ohjaimen käyttöohje. Part No.: R08019034086. OM-GS02-1009(0)-Acson FAN SWING MODE TURBO TIMER OFF CANCEL. Acson A5WM15JR Acson A5WM25JR
-Acson FAN SWING MODE TURBO TIMER OFF CANCEL. Acson A5WM15JR Acson A5WM25JR") Kauko-ohjaimen käyttöohje Part No.: R08019034086 OM-GS0-1009(0)-Acson Acson A5WM15JR Acson A5WM5JR 1 6 7 9 3 4 5 13 1 11 8 10 Kiinnitys seinään Paristojen asennus (AAA.R03) Paristot 1) Tyyppi AAA R03 )
Kauko-ohjaimen käyttöohje Part No.: R08019034086 OM-GS0-1009(0)-Acson Acson A5WM15JR Acson A5WM5JR 1 6 7 9 3 4 5 13 1 11 8 10 Kiinnitys seinään Paristojen asennus (AAA.R03) Paristot 1) Tyyppi AAA R03 )
S-108.3020 Elektroniikan häiriökysymykset. Laboratoriotyö, kevät 2010
 1/7 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö, kevät 2010 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä Viimeksi päivitetty 25.2.2010 / MO 2/7 Johdanto Sähköisiä
1/7 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö, kevät 2010 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä Viimeksi päivitetty 25.2.2010 / MO 2/7 Johdanto Sähköisiä
- Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset
 Phantom / H3-3D Gimbal Kalibrointiohjeet - Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset Aloitus: DJI
Phantom / H3-3D Gimbal Kalibrointiohjeet - Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset Aloitus: DJI
LHV325 Ohjelmoinnin perusteet. WorkBook. Jussi Tapio Kuosa
 LHV325 Ohjelmoinnin perusteet WorkBook Jussi Tapio Kuosa Versiohistoria: 5.12.2013 Versio 1.0 (ensimmäinen versio) Lataa ohjeita työkirjaan liittyen Sisällys T02* Työkaluihin tutustumista ja työkalujen
LHV325 Ohjelmoinnin perusteet WorkBook Jussi Tapio Kuosa Versiohistoria: 5.12.2013 Versio 1.0 (ensimmäinen versio) Lataa ohjeita työkirjaan liittyen Sisällys T02* Työkaluihin tutustumista ja työkalujen
DumpDbox-ohjelmiston asennus- ja käyttöohjeet Sisällys
 DumpDbox-ohjelmiston asennus- ja käyttöohjeet Sisällys 1. Esittely... 2 2. Asennusohjeet... 2 3. Yleiskuva ohjelmistosta... 3 4. Tietojen siirtäminen D-Boxin avulla... 4 4.1. Piirturitiedostojen siirtäminen...
DumpDbox-ohjelmiston asennus- ja käyttöohjeet Sisällys 1. Esittely... 2 2. Asennusohjeet... 2 3. Yleiskuva ohjelmistosta... 3 4. Tietojen siirtäminen D-Boxin avulla... 4 4.1. Piirturitiedostojen siirtäminen...
TKK, TTY, LTY, OY, ÅA, TY ja VY insinööriosastojen valintakuulustelujen fysiikan koe 31.5.2006, malliratkaisut ja arvostelu.
 1 Linja-autoon on suunniteltu vauhtipyörä, johon osa linja-auton liike-energiasta siirtyy jarrutuksen aikana Tätä energiaa käytetään hyväksi kun linja-autoa taas kiihdytetään Linja-auto, jonka nopeus on
1 Linja-autoon on suunniteltu vauhtipyörä, johon osa linja-auton liike-energiasta siirtyy jarrutuksen aikana Tätä energiaa käytetään hyväksi kun linja-autoa taas kiihdytetään Linja-auto, jonka nopeus on
OHJELMOINTILAITE 10/50
 OHJELMOINTILAITE 10/50 1 2 3 4 5 6 17 16 15 7 14 8 13 12 11 10 9 1) Näyttö 1 taivutuksen nro. 2) Näyttö 2 kulma 3) LED merkkivalo MANUAALI 4) OFF-SET. 5) Taivutussuunta. 6) Palautus 7) Käynnistys ja resetointi.
OHJELMOINTILAITE 10/50 1 2 3 4 5 6 17 16 15 7 14 8 13 12 11 10 9 1) Näyttö 1 taivutuksen nro. 2) Näyttö 2 kulma 3) LED merkkivalo MANUAALI 4) OFF-SET. 5) Taivutussuunta. 6) Palautus 7) Käynnistys ja resetointi.
Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla.
 Speedohealer V4 Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla. 1. Esipuhe Onnittelemme sinua Speedohealer laitteen oston johdosta. HealTech Electronics Ltd. on omistautunut
Speedohealer V4 Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla. 1. Esipuhe Onnittelemme sinua Speedohealer laitteen oston johdosta. HealTech Electronics Ltd. on omistautunut
TEHTÄVIEN RATKAISUT. b) 105-kiloisella puolustajalla on yhtä suuri liikemäärä, jos nopeus on kgm 712 p m 105 kg
 105-kiloisella puolustajalla on yhtä suuri liikemäärä, jos nopeus on kgm 712 p m 105 kg") TEHTÄVIEN RATKAISUT 15-1. a) Hyökkääjän liikemäärä on p = mv = 89 kg 8,0 m/s = 71 kgm/s. b) 105-kiloisella puolustajalla on yhtä suuri liikemäärä, jos nopeus on kgm 71 p v = = s 6,8 m/s. m 105 kg 15-.
TEHTÄVIEN RATKAISUT 15-1. a) Hyökkääjän liikemäärä on p = mv = 89 kg 8,0 m/s = 71 kgm/s. b) 105-kiloisella puolustajalla on yhtä suuri liikemäärä, jos nopeus on kgm 71 p v = = s 6,8 m/s. m 105 kg 15-.
HARJOITUSTYÖ: LabVIEW, Kiihtyvyysanturi
 Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: LabVIEW, Kiihtyvyysanturi Tarvittavat laitteet: PC Labview
Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: LabVIEW, Kiihtyvyysanturi Tarvittavat laitteet: PC Labview
KIITOS RICA OPTIMOINTIOHJELMAN VALITSEMISESTA
 KIITOS RICA OPTIMOINTIOHJELMAN VALITSEMISESTA Asennusohjeiden sisältö 1. RICA optimointiohjelmoinnin periaate isoftloaderilla... 2 2. RICA isoftloader toimituspaketin sisältö... 3 3. isoftloader Sync-ohjelmiston
KIITOS RICA OPTIMOINTIOHJELMAN VALITSEMISESTA Asennusohjeiden sisältö 1. RICA optimointiohjelmoinnin periaate isoftloaderilla... 2 2. RICA isoftloader toimituspaketin sisältö... 3 3. isoftloader Sync-ohjelmiston
A14-11 Potilaan mittaustiedon siirtäminen matkapuhelimeen
 1 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A14-11 Potilaan mittaustiedon siirtäminen matkapuhelimeen Projektisuunnitelma Tommi Salminen, Hanna Ukkola, Olli Törmänen 19.09.2014 1 Projektin
1 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A14-11 Potilaan mittaustiedon siirtäminen matkapuhelimeen Projektisuunnitelma Tommi Salminen, Hanna Ukkola, Olli Törmänen 19.09.2014 1 Projektin
Parametrit voimansiirtolinja. Johdanto. SDP3:n päällirakentajien versio
 Johdanto Tässä asiakirjassa kuvataan voimansiirtolinjaan liittyvät parametrit. Parametrien luettelon rajaamiseksi tässä kuvataan vain parametrit, joista on todennäköisesti hyötyä päällirakentajille. Johdanto
Johdanto Tässä asiakirjassa kuvataan voimansiirtolinjaan liittyvät parametrit. Parametrien luettelon rajaamiseksi tässä kuvataan vain parametrit, joista on todennäköisesti hyötyä päällirakentajille. Johdanto
Tutustu Daisy-soittimeen!
 Tutustu Daisy-soittimeen! Daisy-julkaisut Äänikirjat, -lehdet, oppaat, tiedotteet Äänen lisäksi kuvia, piirroksia, taulukoita Tiedostot MP3-muotoisia Jakelu CD-levyillä tai verkon kautta Daisy-julkaisuja
Tutustu Daisy-soittimeen! Daisy-julkaisut Äänikirjat, -lehdet, oppaat, tiedotteet Äänen lisäksi kuvia, piirroksia, taulukoita Tiedostot MP3-muotoisia Jakelu CD-levyillä tai verkon kautta Daisy-julkaisuja
Sähköautoasiaa. Ajonhallintalaite ehdotus #1
 Sähköautoasiaa Ajonhallintalaite ehdotus #1 Pekka Ritamäki 17.10.2009 [email protected] Kokous Mikroteamissa 13.10.2009 17:00-22:00 Osallistujat: Aulis Eskola Tapio Vihuri Juha Pulkkila Pekka Ritamäki
Sähköautoasiaa Ajonhallintalaite ehdotus #1 Pekka Ritamäki 17.10.2009 [email protected] Kokous Mikroteamissa 13.10.2009 17:00-22:00 Osallistujat: Aulis Eskola Tapio Vihuri Juha Pulkkila Pekka Ritamäki
Multivibraattorit. Bistabiili multivibraattori:
 Multivibraattorit Elektroniikan piiri jota käytetään erilaisissa kahden tason systeemeissä kuten oskillaattorit, ajastimet tai kiikkut. Multivibraattorissa on vahvistava elementtti ja ristiinkytketyt rvastukset
Multivibraattorit Elektroniikan piiri jota käytetään erilaisissa kahden tason systeemeissä kuten oskillaattorit, ajastimet tai kiikkut. Multivibraattorissa on vahvistava elementtti ja ristiinkytketyt rvastukset
1. Yleistä. Kuva 1. Graafinen ohjauspaneeli LCD-näytöllä. Taajuusmuuttajan tila. Panel Ready. 3 Motor Current 3.4 A PAINONÄPPÄIMET
 VACON CX/CXL/CXS Graafinen ohjauspaneeli Sivu 1 1. Yleistä Taajuusmuuttajan tila Panel / Remote = Aktiivinen ohjauspaikka Ready = Syöttöjännitte on kytketty ja taajuusmuuttaja on valmis käyttöön Fault
VACON CX/CXL/CXS Graafinen ohjauspaneeli Sivu 1 1. Yleistä Taajuusmuuttajan tila Panel / Remote = Aktiivinen ohjauspaikka Ready = Syöttöjännitte on kytketty ja taajuusmuuttaja on valmis käyttöön Fault
Sisällysluettelo. HUOM! Muista lukea tämä opas huolellisesti ennen käyttöönottoa.
 2 Sisällysluettelo Aihe: Sivunumero: 1. Yleistä tietoa laitteesta 1.1. Tärkeimmät ominaisuudet 3. 1.2. Laitteistovaatimukset 3. 1.3. Rajoitukset/kiellot 3. 2. Piirtopöydän esittely 2.1. Laitteen osat 4.
2 Sisällysluettelo Aihe: Sivunumero: 1. Yleistä tietoa laitteesta 1.1. Tärkeimmät ominaisuudet 3. 1.2. Laitteistovaatimukset 3. 1.3. Rajoitukset/kiellot 3. 2. Piirtopöydän esittely 2.1. Laitteen osat 4.
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-17 Ikäihmisten kotona asumista tukevien järjestelmien kehittäminen Väliraportti Joonas Aalto-Setälä Ossi Malaska 1. Projektin tavoitteet Projektin
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-17 Ikäihmisten kotona asumista tukevien järjestelmien kehittäminen Väliraportti Joonas Aalto-Setälä Ossi Malaska 1. Projektin tavoitteet Projektin
Joka päivän alussa, asentaja saa ohjeistuksen päivän töille.
 Taitaja 2011 kilpailutehtävän kuvaus. 26.4.2011 Viitetarina Prosessilaitokseen tulee uusi pullotusjärjestelmä tuotteen näytteistykseen. Pullotusyksikkö tulee ottamaan näytteitä prosessin säiliön 1 nesteestä.
Taitaja 2011 kilpailutehtävän kuvaus. 26.4.2011 Viitetarina Prosessilaitokseen tulee uusi pullotusjärjestelmä tuotteen näytteistykseen. Pullotusyksikkö tulee ottamaan näytteitä prosessin säiliön 1 nesteestä.
PR 3100 -SARJA ASENNUS JA KYTKENTÄ
 PR 3100 SARJA ASENNUS JA KYTKENTÄ 3100V105 3114V101 FIN Yksiköitä voi syöttää 24 VDC ± 30 % jännitteellä suoraan johdottamalla tai johdottamalla maks. 130 yksikköä rinnakkain toisiinsa. 3405tehonliitäntäyksikkö
PR 3100 SARJA ASENNUS JA KYTKENTÄ 3100V105 3114V101 FIN Yksiköitä voi syöttää 24 VDC ± 30 % jännitteellä suoraan johdottamalla tai johdottamalla maks. 130 yksikköä rinnakkain toisiinsa. 3405tehonliitäntäyksikkö
Tällä ohjelmoitavalla laitteella saat hälytyksen, mikäli lämpötila nousee liian korkeaksi.
 Lämpötilahälytin Tällä ohjelmoitavalla laitteella saat hälytyksen, mikäli lämpötila nousee liian korkeaksi. Laite koostuu Arduinokortista ja koekytkentälevystä. Hälyttimen toiminnat ohjelmoidaan Arduinolle.
Lämpötilahälytin Tällä ohjelmoitavalla laitteella saat hälytyksen, mikäli lämpötila nousee liian korkeaksi. Laite koostuu Arduinokortista ja koekytkentälevystä. Hälyttimen toiminnat ohjelmoidaan Arduinolle.
Harjoitustyö - Mikroprosessorit Liikennevalot
 Saku Chydenius tammikuu 2004 Asko Ikävalko Harjoitustyö - Mikroprosessorit Liikennevalot Työn valvoja: Kimmo Saurén RAPORTTI 1(8) 1. Alkuperäinen tehtävänanto 2. Määritelmä valojen vaihtumiselle Muodosta
Saku Chydenius tammikuu 2004 Asko Ikävalko Harjoitustyö - Mikroprosessorit Liikennevalot Työn valvoja: Kimmo Saurén RAPORTTI 1(8) 1. Alkuperäinen tehtävänanto 2. Määritelmä valojen vaihtumiselle Muodosta
ONE 118 OHJELMOITAVA PÄÄVAHVISTIN
 10 ohjelmoitavaa UHF- kanavanippua 3 erillistä UHF tuloa; UHF1 UHF2 UHF3 Laajakaistatulo VHF I +ULA Laajakaistatulo VHF III + DAB UHF filtteri 1 5 kanavan levyinen; 8-40 MHz Automaattinen skannaus UHF-
10 ohjelmoitavaa UHF- kanavanippua 3 erillistä UHF tuloa; UHF1 UHF2 UHF3 Laajakaistatulo VHF I +ULA Laajakaistatulo VHF III + DAB UHF filtteri 1 5 kanavan levyinen; 8-40 MHz Automaattinen skannaus UHF-
Quha Zono. Käyttöohje
 Quha Zono Käyttöohje 2 Virtakytkin/ merkkivalo USB-portti Kiinnitysura Tervetuloa käyttämään Quha Zono -hiiriohjainta! Tämä käyttöohje kertoo tuotteen ominaisuuksista ja opastaa laitteen käyttöön. Lue
Quha Zono Käyttöohje 2 Virtakytkin/ merkkivalo USB-portti Kiinnitysura Tervetuloa käyttämään Quha Zono -hiiriohjainta! Tämä käyttöohje kertoo tuotteen ominaisuuksista ja opastaa laitteen käyttöön. Lue
kipinäpurkauksena, josta salama on esimerkki.
 Sähkö 25 Esineet saavat sähkövarauksen hankauksessa kipinäpurkauksena, josta salama on esimerkki. Hankauksessa esineet voivat varautua sähköisesti. Varaukset syntyvät, koska hankauksessa kappaleesta siirtyy
Sähkö 25 Esineet saavat sähkövarauksen hankauksessa kipinäpurkauksena, josta salama on esimerkki. Hankauksessa esineet voivat varautua sähköisesti. Varaukset syntyvät, koska hankauksessa kappaleesta siirtyy
Näppäimistö CT 1000. Käyttäjäopas. Global Safety & Security Solutions Oy E-mail: [email protected]. CT1000v.5
 Näppäimistö CT 1000 Käyttäjäopas CT1000v.5 Global Safety & Security Solutions Oy E-mail: [email protected] Sivu 2 CT 1000 Rajoitukset Kaikki oikeudet tähän ohjekirjaan ovat Global Safety & Security
Näppäimistö CT 1000 Käyttäjäopas CT1000v.5 Global Safety & Security Solutions Oy E-mail: [email protected] Sivu 2 CT 1000 Rajoitukset Kaikki oikeudet tähän ohjekirjaan ovat Global Safety & Security
Käyttöohje Digitaaliseen ulkoajastimeen
 Käyttöohje Digitaaliseen ulkoajastimeen Tuotenumero: 8030 EMT449ETR A. Toiminnot 1. Ohjelmoitavaa ajastinta voidaan käyttää virran katkaisimeksi automaattisesti, esimerkiksi sähkölaitteille kotona. Ajastin
Käyttöohje Digitaaliseen ulkoajastimeen Tuotenumero: 8030 EMT449ETR A. Toiminnot 1. Ohjelmoitavaa ajastinta voidaan käyttää virran katkaisimeksi automaattisesti, esimerkiksi sähkölaitteille kotona. Ajastin
Käyttöohje. Tasapainolauta
 Käyttöohje Tasapainolauta Kiitos kun ostit tasapainolaudan.! VAROITUS! Opettele ajamaan laitteella turvallisesti, huomioi muu liikenne ja säännöt. Käytä lisäksi säädösten mukaisia turvavarusteita. Älä
Käyttöohje Tasapainolauta Kiitos kun ostit tasapainolaudan.! VAROITUS! Opettele ajamaan laitteella turvallisesti, huomioi muu liikenne ja säännöt. Käytä lisäksi säädösten mukaisia turvavarusteita. Älä
Agimet ajanottolaitteiston käyttöohje
 Agimet ajanottolaitteiston käyttöohje Tiedon siirto porteilta ohjain yksikköön / näyttöön ja päinvastoin on langaton, kantama noin 100 m. Ohjain-yksikkö on liitettävissä USB-portin kautta tietokoneeseen,
Agimet ajanottolaitteiston käyttöohje Tiedon siirto porteilta ohjain yksikköön / näyttöön ja päinvastoin on langaton, kantama noin 100 m. Ohjain-yksikkö on liitettävissä USB-portin kautta tietokoneeseen,
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
HARJOITUSTYÖ: LabVIEW, Liiketunnistin
 Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: LabVIEW, Liiketunnistin Tarvittavat laitteet: PC Labview
Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: LabVIEW, Liiketunnistin Tarvittavat laitteet: PC Labview
PM10OUT2A-kortti. Ohje
 PM10OUT2A-kortti Ohje Dokumentin ID 6903 V3 13.4.2015 Sisällysluettelo Sisällysluettelo... 2 Esittely... 3 Kortti ja rekisterit... 3 Lähtöviestit... 4 Signaalien kytkeminen... 4 Käyttö... 4 Asetusten tekeminen...
PM10OUT2A-kortti Ohje Dokumentin ID 6903 V3 13.4.2015 Sisällysluettelo Sisällysluettelo... 2 Esittely... 3 Kortti ja rekisterit... 3 Lähtöviestit... 4 Signaalien kytkeminen... 4 Käyttö... 4 Asetusten tekeminen...
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-03 USB-käyttöinen syvyysanturi 5op 13.9.2011-29.11.2011 Johan Backlund Ohjaaja: Johan Grönholm Johdanto Projektin tavoitteena oli suunnitella
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-03 USB-käyttöinen syvyysanturi 5op 13.9.2011-29.11.2011 Johan Backlund Ohjaaja: Johan Grönholm Johdanto Projektin tavoitteena oli suunnitella
Apple iphone 4 puhelimen käyttöönotto:
 Apple iphone 4 puhelimen käyttöönotto: Ennen vanhan puhelimesi käytöstä poistoa, pidäthän huolen, että olet synkronisoinut yhteystietosi Exchange palvelimelle! iphone 4 yhdellä silmäyksellä Purettuasi
Apple iphone 4 puhelimen käyttöönotto: Ennen vanhan puhelimesi käytöstä poistoa, pidäthän huolen, että olet synkronisoinut yhteystietosi Exchange palvelimelle! iphone 4 yhdellä silmäyksellä Purettuasi
Fortum Fiksu Mittaava, etäohjattava sähkökytkin sisäkäyttöön Käyttöohjeet
 Fortum Fiksu Mittaava, etäohjattava sähkökytkin sisäkäyttöön Käyttöohjeet Sisällys 1 Fortum Fiksu -järjestelmään liitettävä mittaava pistorasiakytkin sisäkäyttöön 2 Asentaminen 2.1 Kytkimen liittäminen
Fortum Fiksu Mittaava, etäohjattava sähkökytkin sisäkäyttöön Käyttöohjeet Sisällys 1 Fortum Fiksu -järjestelmään liitettävä mittaava pistorasiakytkin sisäkäyttöön 2 Asentaminen 2.1 Kytkimen liittäminen
LUMECOM. Jyrsinsovellus. 1. Asennusohje 2. Käyttöohje
 LUMECOM Jyrsinsovellus 1. Asennusohje 2. Käyttöohje 11.4.2018 Asennusohje - ProJyrsin 1. Avaa Google Play Store tabletiltasi - sovellus ei tue toistaiseksi Apple/IOS käyttöjärjestelmiä 2. Kirjoita hakukenttään:
LUMECOM Jyrsinsovellus 1. Asennusohje 2. Käyttöohje 11.4.2018 Asennusohje - ProJyrsin 1. Avaa Google Play Store tabletiltasi - sovellus ei tue toistaiseksi Apple/IOS käyttöjärjestelmiä 2. Kirjoita hakukenttään:
KREATEL IPTV-STB 1510 ASENNUSOHJE
 1 (9) KREATEL IPTV-STB 1510 Mikä IPTV-boksi on? Pystyäksesi katsomaan normaalilla TV-vastaanottimellasi digitaalisia -lähetyksiä, tarvitset IPTV-boksin, joka muuntaa laajakaistaverkossa välitettävän digitaalisesti
1 (9) KREATEL IPTV-STB 1510 Mikä IPTV-boksi on? Pystyäksesi katsomaan normaalilla TV-vastaanottimellasi digitaalisia -lähetyksiä, tarvitset IPTV-boksin, joka muuntaa laajakaistaverkossa välitettävän digitaalisesti
ERGO-DigiStick pakettisi sisältää seuraavat tuotteet:
 ERGO-DigiS ck Käy öohje Metsäkuormain Digitaalinen ohjauskahva sisäänrakennetulla elektroniikalla hydrauliventtiilien ohjaukseen. Käyttökohteena: metsäkuormaimet, etukuormaimet ja muu liikkuva kalusto
ERGO-DigiS ck Käy öohje Metsäkuormain Digitaalinen ohjauskahva sisäänrakennetulla elektroniikalla hydrauliventtiilien ohjaukseen. Käyttökohteena: metsäkuormaimet, etukuormaimet ja muu liikkuva kalusto
Tutustuminen tuotantolinjastoon
 Tutustuminen tuotantolinjastoon Hands-on harjoitus 1 1 Tehtävät 2 Tuotantolinjasto yleisesti 2.1 Asemien käsitteleminen (Kuva 1) 2.2 Tuotantolinjaston toiminta 3 Jakeluaseman kuvaus 4 Testausaseman kuvaus
Tutustuminen tuotantolinjastoon Hands-on harjoitus 1 1 Tehtävät 2 Tuotantolinjasto yleisesti 2.1 Asemien käsitteleminen (Kuva 1) 2.2 Tuotantolinjaston toiminta 3 Jakeluaseman kuvaus 4 Testausaseman kuvaus
KÄYTTÖOHJE. M2M Point - to - Point
 KÄYTTÖOHJE M2M Point - to - Point M2M Paketti SISÄLLYSLUETTELO YLEISTÄ 1 KÄYTTÖÖNOTTO 1.1 LAITTEISTON ASENNUS 2 TULOJEN JA LÄHTÖJEN KYTKENTÄ 2.1 TILATIETOKYTKENNÄT 2.2 ANALOGIAKYTKENNÄT 3 KANAVANVAIHTO
KÄYTTÖOHJE M2M Point - to - Point M2M Paketti SISÄLLYSLUETTELO YLEISTÄ 1 KÄYTTÖÖNOTTO 1.1 LAITTEISTON ASENNUS 2 TULOJEN JA LÄHTÖJEN KYTKENTÄ 2.1 TILATIETOKYTKENNÄT 2.2 ANALOGIAKYTKENNÄT 3 KANAVANVAIHTO
Casall X600 CROSSTRAINER 93003
 Casall X600 CROSSTRAINER 93003 OSALUETTELO Nro Kohta Kuvaus Määrä A, A-1 Tietokone ja ruuvi SM2871-67 1 KPL B Ohjaustanko 25,4 1 KPL B-1 Kahvan pehmuste 440x20x5,0 2 KPL B-2 Kahvan tulppa 7/8" 2 KPL B-3,
Casall X600 CROSSTRAINER 93003 OSALUETTELO Nro Kohta Kuvaus Määrä A, A-1 Tietokone ja ruuvi SM2871-67 1 KPL B Ohjaustanko 25,4 1 KPL B-1 Kahvan pehmuste 440x20x5,0 2 KPL B-2 Kahvan tulppa 7/8" 2 KPL B-3,
LUMECOM. Jyrsinsovellus. 1. Asennusohje 2. Käyttöohje 3. Käyttöönottokortti
 LUMECOM Jyrsinsovellus 1. Asennusohje 2. Käyttöohje 3. Käyttöönottokortti 11.4.2018 Asennusohje - ProJyrsin 1. Avaa Google Play Store tabletiltasi - sovellus ei tue toistaiseksi Apple/IOS käyttöjärjestelmiä
LUMECOM Jyrsinsovellus 1. Asennusohje 2. Käyttöohje 3. Käyttöönottokortti 11.4.2018 Asennusohje - ProJyrsin 1. Avaa Google Play Store tabletiltasi - sovellus ei tue toistaiseksi Apple/IOS käyttöjärjestelmiä
Ohjeissa pyydetään toisinaan katsomaan koodia esimerkkiprojekteista (esim. Liikkuva_Tausta1). Saat esimerkkiprojektit opettajalta.
. Saat esimerkkiprojektit opettajalta.") Ohjeissa pyydetään toisinaan katsomaan koodia esimerkkiprojekteista (esim. Liikkuva_Tausta1). Saat esimerkkiprojektit opettajalta. Vastauksia kysymyksiin Miten hahmon saa hyppäämään? Yksinkertaisen hypyn
Ohjeissa pyydetään toisinaan katsomaan koodia esimerkkiprojekteista (esim. Liikkuva_Tausta1). Saat esimerkkiprojektit opettajalta. Vastauksia kysymyksiin Miten hahmon saa hyppäämään? Yksinkertaisen hypyn
Yleishimmentimellä varustetun, uppoasennettavan WMR-252-vastaanottimen käyttöopas
 Yleishimmentimellä varustetun, uppoasennettavan WMR-252-vastaanottimen käyttöopas Ainutlaatuinen, himmennystoiminnolla varustettu langaton yleisvastaanotin esimerkiksi himmennettävien 230 voltin LEDvalojen,
Yleishimmentimellä varustetun, uppoasennettavan WMR-252-vastaanottimen käyttöopas Ainutlaatuinen, himmennystoiminnolla varustettu langaton yleisvastaanotin esimerkiksi himmennettävien 230 voltin LEDvalojen,
MINI-DISK. 1. MINI-DISK levykkeen asentaminen levyke-asemaan
 1 MINI-DISK MINI-DISK soittimella voidaan tallentaa ääntä ulkopuolisen mikrofonin tai toisen äänilähteen ulostulon kautta. MINI-DISK nauhurilla (ei ole varsinainen nauhuri vaan digitaalinen äänitys- ja
1 MINI-DISK MINI-DISK soittimella voidaan tallentaa ääntä ulkopuolisen mikrofonin tai toisen äänilähteen ulostulon kautta. MINI-DISK nauhurilla (ei ole varsinainen nauhuri vaan digitaalinen äänitys- ja
Käyttöohjeet Pinta-alamittari Flex Counter
 Käyttöohjeet Pinta-alamittari Flex Counter System Part number Serial number Installed by Installation date Lykketronic Area Counter Standard Page 1 SISÄLLYSLUETTELO 1. YLEISTÄ TIETOA FLEX COUNTERISTA...3
Käyttöohjeet Pinta-alamittari Flex Counter System Part number Serial number Installed by Installation date Lykketronic Area Counter Standard Page 1 SISÄLLYSLUETTELO 1. YLEISTÄ TIETOA FLEX COUNTERISTA...3
PIKAOPAS E6000/8000-sarja
 PIKAOPAS E6000/8000-sarja SISÄLLYSLUETTELO Akun lataaminen... 4 Akun asennus... 9 Akun irroittamien... 10 Pyörätietokoneen kiinnittäminen ja irrottaminen... 12 Virran kytkeminen päälle/pois... 13 Polkupyörällä
PIKAOPAS E6000/8000-sarja SISÄLLYSLUETTELO Akun lataaminen... 4 Akun asennus... 9 Akun irroittamien... 10 Pyörätietokoneen kiinnittäminen ja irrottaminen... 12 Virran kytkeminen päälle/pois... 13 Polkupyörällä
VIM RM1 VAL0123136 / SKC9068201 VIBRATION MONITOR RMS-MITTAUSJÄRJESTELMÄLLE KÄSIKIRJA. VIM-RM1 FI.docx 1998-06-04 / BL 1(5)
") VIM RM1 VAL0123136 / SKC9068201 VIBRATION MONITOR RMS-MITTAUSJÄRJESTELMÄLLE KÄSIKIRJA FI.docx 1998-06-04 / BL 1(5) SISÄLTÖ 1. KOMPONENTTIEN SIJAINTI 2. TOIMINNAN KUVAUS 3. TEKNISET TIEDOT 4. SÄÄTÖ 5. KALIBROINTI
VIM RM1 VAL0123136 / SKC9068201 VIBRATION MONITOR RMS-MITTAUSJÄRJESTELMÄLLE KÄSIKIRJA FI.docx 1998-06-04 / BL 1(5) SISÄLTÖ 1. KOMPONENTTIEN SIJAINTI 2. TOIMINNAN KUVAUS 3. TEKNISET TIEDOT 4. SÄÄTÖ 5. KALIBROINTI
Crosstrainer (Malli E820P)
") Crosstrainer (Malli E820P) Vaihe 1. Keskiputken asennus. Liitä sensorin johto (A2) ja näytön johto (F2) toisiinsa. Kiinnitä keskiputki (F) runkoon (A) pultilla (F6), tiivisterenkaalla (F5) ja M8 tiivisterenkaalla
Crosstrainer (Malli E820P) Vaihe 1. Keskiputken asennus. Liitä sensorin johto (A2) ja näytön johto (F2) toisiinsa. Kiinnitä keskiputki (F) runkoon (A) pultilla (F6), tiivisterenkaalla (F5) ja M8 tiivisterenkaalla
KÄYTTÖ-OHJE EVERLAST
 KÄYTTÖ-OHJE EVERLAST Power i_tig 201 HUOMIO! TAKUU EI KATA VIKAA JOKA JOHTUU LIAN AIHEUTTAMASTA LÄPILYÖNNISTÄ PIIRIKORTILLA/KOMPONENTEISSA. Jotta koneelle mahdollistetaan pitkä ja ongelmaton toiminta edellytämme
KÄYTTÖ-OHJE EVERLAST Power i_tig 201 HUOMIO! TAKUU EI KATA VIKAA JOKA JOHTUU LIAN AIHEUTTAMASTA LÄPILYÖNNISTÄ PIIRIKORTILLA/KOMPONENTEISSA. Jotta koneelle mahdollistetaan pitkä ja ongelmaton toiminta edellytämme
Käyttöohje EMT757 / 3567 Ohjelmoitava digitaalinen kellokytkin
 Käyttöohje EMT757 / 3567 Ohjelmoitava digitaalinen kellokytkin A. Toiminnot 1. Käytetään päällä/pois -aikojen asettamiseen, säätämään erilaisia aikajaksoja virran päälläololle. Toimii erilaisten laitteiden
Käyttöohje EMT757 / 3567 Ohjelmoitava digitaalinen kellokytkin A. Toiminnot 1. Käytetään päällä/pois -aikojen asettamiseen, säätämään erilaisia aikajaksoja virran päälläololle. Toimii erilaisten laitteiden
S11-09 Control System for an. Autonomous Household Robot Platform
 S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
KÄYTTÖOHJE - INVERTTERI 12V tai 24V -> 230V 55Hz
 KÄYTTÖOHJE - INVERTTERI 12V tai 24V -> 230V 55Hz G-12-015, G-12-030, G-12-060 G-24-015, G-24-030, G-24-060 1. Laitteen kuvaus Virta päällä merkkivalo Virhe-merkkivalo (ylikuormitus, alhainen/korkea akun
KÄYTTÖOHJE - INVERTTERI 12V tai 24V -> 230V 55Hz G-12-015, G-12-030, G-12-060 G-24-015, G-24-030, G-24-060 1. Laitteen kuvaus Virta päällä merkkivalo Virhe-merkkivalo (ylikuormitus, alhainen/korkea akun
P I C A X E O H J E L M O I N T I
 PICAXE OHJELMOINTI Tämä materiaalipaketti on tehty PICAXE piireihin perustuvaa elektroniikan opetusta varten. Tarkoituksena on opettaa ohjelmoitavan mikropiirin käyttöä erilaisissa sovellutuksissa. Lisää
PICAXE OHJELMOINTI Tämä materiaalipaketti on tehty PICAXE piireihin perustuvaa elektroniikan opetusta varten. Tarkoituksena on opettaa ohjelmoitavan mikropiirin käyttöä erilaisissa sovellutuksissa. Lisää
DIMLITE Single. Sähkönumero Käyttöohje
 DIMLITE Single Sähkönumero 2604220 Käyttöohje T1 sisääntulo T1 sisääntulo Yksittäispainikeohjaus Nopea painallus T1 painikkeesta sytyttää valaistuksen viimeisimmäksi aseteltuun tilannearvoon. Toinen lyhyt
DIMLITE Single Sähkönumero 2604220 Käyttöohje T1 sisääntulo T1 sisääntulo Yksittäispainikeohjaus Nopea painallus T1 painikkeesta sytyttää valaistuksen viimeisimmäksi aseteltuun tilannearvoon. Toinen lyhyt
Sovelletun fysiikan pääsykoe
 Sovelletun fysiikan pääsykoe 7.6.016 Kokeessa on neljä (4) tehtävää. Vastaa kaikkiin tehtäviin. Muista kirjoittaa myös laskujesi välivaiheet näkyviin. Huom! Kirjoita tehtävien 1- vastaukset yhdelle konseptille
Sovelletun fysiikan pääsykoe 7.6.016 Kokeessa on neljä (4) tehtävää. Vastaa kaikkiin tehtäviin. Muista kirjoittaa myös laskujesi välivaiheet näkyviin. Huom! Kirjoita tehtävien 1- vastaukset yhdelle konseptille
Supply jännite: Ei kuormaa Tuuletin Vastus Molemmat DC AC Taajuus/taajuudet
 S-108.3020 Elektroniikan häiriökysymykset 1/5 Ryhmän nro: Nimet/op.nro: Tarvittavat mittalaitteet: - Oskilloskooppi - Yleismittari, 2 kpl - Ohjaus- ja etäyksiköt Huom. Arvot mitataan pääasiassa lämmityksen
S-108.3020 Elektroniikan häiriökysymykset 1/5 Ryhmän nro: Nimet/op.nro: Tarvittavat mittalaitteet: - Oskilloskooppi - Yleismittari, 2 kpl - Ohjaus- ja etäyksiköt Huom. Arvot mitataan pääasiassa lämmityksen
KÄYTTÖOHJE PEL / PEL-M
 V2.0.0 (05.09.2014) 1 (6) KÄYTTÖÖNOTTO Asennus - Lähetin tulisi asentaa mittauskohdan yläpuolelle kondensoitumisongelmien välttämiseksi. - Kanavan ylipaine mitataan siten, että kanavan mittayhde yhdistetään
V2.0.0 (05.09.2014) 1 (6) KÄYTTÖÖNOTTO Asennus - Lähetin tulisi asentaa mittauskohdan yläpuolelle kondensoitumisongelmien välttämiseksi. - Kanavan ylipaine mitataan siten, että kanavan mittayhde yhdistetään
KÄYTTÖOHJE HIRVIMATIC (2V0) 5.5.2010
 5.5.2010") 1 KÄYTTÖOHJE HIRVIMATIC (2V0) 5.5.2010 NÄPPÄIMISTÖ: Ohjelman valinta Asetukset /nollaus Ajastimen valinta (Ei vielä käytössä) Ohjaus oikealle / lisää asetusta / ajastimen käynnistys Seis / valinnan vahvistus
1 KÄYTTÖOHJE HIRVIMATIC (2V0) 5.5.2010 NÄPPÄIMISTÖ: Ohjelman valinta Asetukset /nollaus Ajastimen valinta (Ei vielä käytössä) Ohjaus oikealle / lisää asetusta / ajastimen käynnistys Seis / valinnan vahvistus
Harjoitustehtäviä kokeeseen: Sähköoppi ja magnetismi
 Harjoitustehtäviä kokeeseen: Sähköoppi ja magnetismi 3. Selitä: a. Suljettu virtapiiri Suljettu virtapiiri on sähkövirran reitti, jonka muodostavat johdot, paristot ja komponentit. Suljetussa virtapiirissä
Harjoitustehtäviä kokeeseen: Sähköoppi ja magnetismi 3. Selitä: a. Suljettu virtapiiri Suljettu virtapiiri on sähkövirran reitti, jonka muodostavat johdot, paristot ja komponentit. Suljetussa virtapiirissä
Äänellä vauhtia robottiin
 Äänellä vauhtia robottiin Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla robotti, joka väistää esteitä ja kulkee sitä nopeampaa mitä kovempi ääni sen lähistöllä on. Robotti tunnistaa esteet
Äänellä vauhtia robottiin Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla robotti, joka väistää esteitä ja kulkee sitä nopeampaa mitä kovempi ääni sen lähistöllä on. Robotti tunnistaa esteet
Mikro-ohjain µc harjoitukset - yleisohje
 Mikro-ohjain µc harjoitukset - yleisohje Keijo Salonen 20. marraskuuta 2016 Sisältö 1 Esittely 2 2 Arduino UNO R3 mikro-ohjain kortti 2 3 Koekytkentälevy 5 4 Elektroniikan komponentit 7 5 Työkalut ja muut
Mikro-ohjain µc harjoitukset - yleisohje Keijo Salonen 20. marraskuuta 2016 Sisältö 1 Esittely 2 2 Arduino UNO R3 mikro-ohjain kortti 2 3 Koekytkentälevy 5 4 Elektroniikan komponentit 7 5 Työkalut ja muut
Käyttöoppaasi. HP COMPAQ PRESARIO F760EM http://fi.yourpdfguides.com/dref/4171044
 Voit lukea suosituksia käyttäjän oppaista, teknisistä ohjeista tai asennusohjeista tuotteelle HP COMPAQ PRESARIO F760EM. Löydät kysymyksiisi vastaukset HP COMPAQ PRESARIO F760EM käyttöoppaasta ( tiedot,
Voit lukea suosituksia käyttäjän oppaista, teknisistä ohjeista tai asennusohjeista tuotteelle HP COMPAQ PRESARIO F760EM. Löydät kysymyksiisi vastaukset HP COMPAQ PRESARIO F760EM käyttöoppaasta ( tiedot,
ClassPad fx-cp400 OS2-päivitys. + Manager-ohjelmisto ja Physium-sovellus
 ClassPad fx-cp400 OS2-päivitys + Manager-ohjelmisto ja Physium-sovellus Käyttöjärjestelmän ja Add-in sovellusten päivityksestä Casio suosittelee aina viimeisimmän käyttöjärjestelmän asentamista. Tällöin
ClassPad fx-cp400 OS2-päivitys + Manager-ohjelmisto ja Physium-sovellus Käyttöjärjestelmän ja Add-in sovellusten päivityksestä Casio suosittelee aina viimeisimmän käyttöjärjestelmän asentamista. Tällöin
33 SOLENOIDIN JA TOROIDIN MAGNEETTIKENTTÄ
 TYÖOHJE 14.7.2010 JMK, TSU 33 SOLENOIDIN JA TOROIDIN MAGNEETTIKENTTÄ Laitteisto: Kuva 1. Kytkentä solenoidin ja toroidin magneettikenttien mittausta varten. Käytä samaa digitaalista jännitemittaria molempien
TYÖOHJE 14.7.2010 JMK, TSU 33 SOLENOIDIN JA TOROIDIN MAGNEETTIKENTTÄ Laitteisto: Kuva 1. Kytkentä solenoidin ja toroidin magneettikenttien mittausta varten. Käytä samaa digitaalista jännitemittaria molempien