Peltorobotin akselimoduulin kontrolleri
|
|
|
- Saija Sala
- 6 vuotta sitten
- Katselukertoja:
Transkriptio
 Janne Hafrén (Mech.")
1 Peltorobotin akselimoduulin kontrolleri Automaatio- ja systeemitekniikan projektityöt B.Sc. Joni Rannisto (Mech.) Janne Hafrén (Mech.) Matti Koskinen (Mech.)
2 Esitelmän rakenne 1. Tehtävänanto ja vaatimukset 2. Elektroniikkasuunnittelu 3. Ohjelma 4. Ongelmat projektin aikana 5. Aikataulu 6. Projektin anti 7. Demo
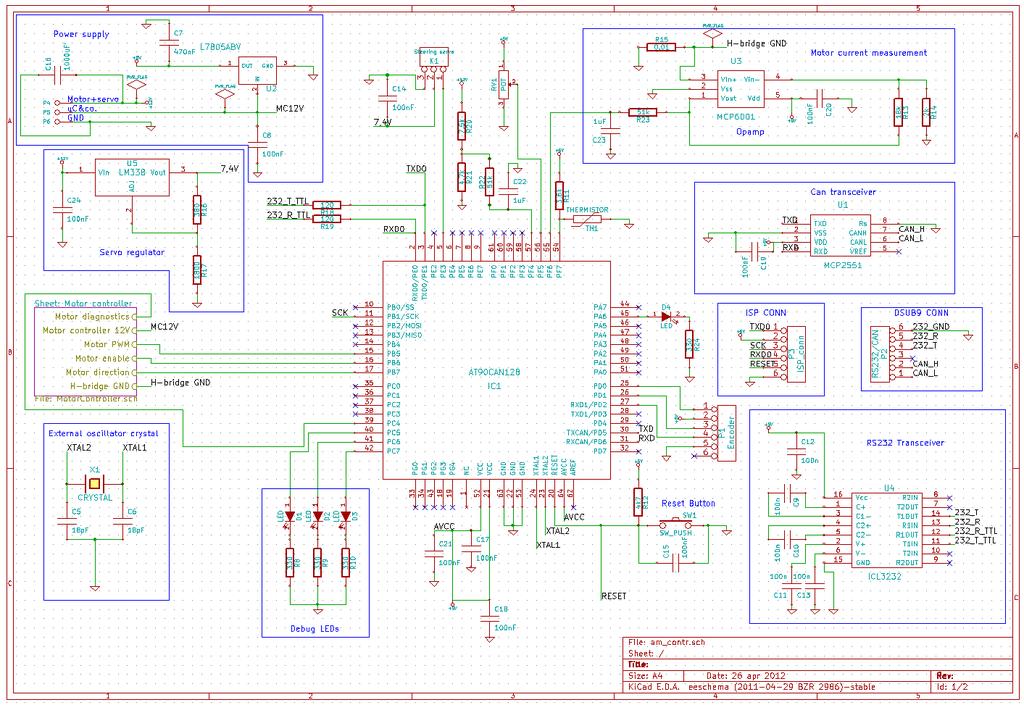
3 Tehtävänanto Peltorobotin voimansiirto perustuu sähkökäyttöön. Vetäviä ja kääntyviä pyöriä hallitaan DC moottoreilla ja RC-servoilla. Yhden akselin veto ja ohjaus alennusvaihteistoineen ja ohjaimineen paketoidaan akselimoduuliksi, joita tehdään yksi varaosaksi. Komentaminen tapahtuu CAN-väylän avulla. Moduuleita tehdään 3 kpl, identtisiä. Akselimoduulin kaikkien toimintojen ohjaamiseen ei löydy valmista kaupallista ohjainta joka täyttäisi vaatimukset. Tämän vuoksi pitää suunnitella ja rakentaa oma ohjain; valitsemalla soveltuvat elektroniikkakomponentit, suunnittelemalla piirilevy joka kestää ~80A virran. Lisäksi ohjaimessa tarvittava mikrokontrolleri tarvitsee ohjelman, CAN-kommunikoinnin sekä säätimien toteutuksen ja virityksen.
4 Vaatimusten määrittely Pitkälti tehtävänannon mukaan Monin osin vastaava kuin edellisinä vuosina, suurimpina eroina CAN-kommunikaatio Moottorin virran mittaus Ajoakun jännitteen mittaus Vikatila
5 Vaatimusten määrittely (1) control the driving motor speed and direction (PWM) control the steering servo (PWM) control some LEDs (mode indicators) read potentiometer signal (servo feedback) read encoder signal (driving motor feedback) measure the driving motor temperature measure the driving motor voltage measure the driving motor current communicate via CAN bus with the rest of the robot get commands from the robot s computer send data to the robot (e.g. driving speed and steering angle)
6 Vaatimusten määrittely (2) have four modes: error mode send error message off mode open loop drive the robot controlled by a remote controller (direct commands from the user via CAN bus) closed loop drive the robot by a given set value of speed (feedback from encoder) there were also some physical limitations for the controller, which are listed below. the motor, h-bridge transistors and voltage regulators heat up the size of the printed circuit board is limited the currents on the board are relatively high, up to 40A in motor acceleration
7 Elektroniikkasuunnittelu Kenelläkään ei aiempaa kokemusta elektroniikkasuunnittelusta Perustui edellisen vuoden ohjaimeen, mutta myös monia muutoksia ja parannuksia Tehtiin käyttäen KiCADiä Ensin kytkentäkaavio, sitten footprintit, komponenttien sijoittelu ja kupariliuskat
8


9
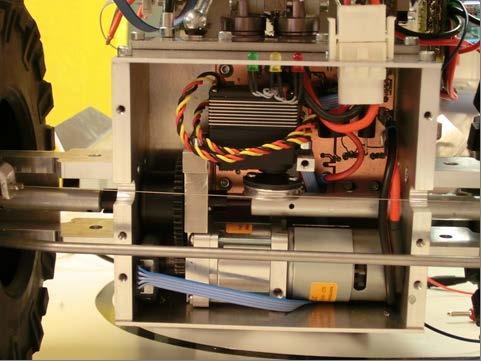
10 Valmistaminen Piirilevyt valmistettiin mekatroniikan oppimisympäristössä itse etsaamalla Komponentit juotettiin ja testaus suoritettiin samassa paikassa
11 Ohjelma 4 moodia: pois päältä avoin säätö suorat ohjauskomennot suljettu säätö PI-säätö asetusarvolla virhetila Yhteydenpito CAN-väylän kautta Vastaanottaa ohjauskomennot Lähettää dataviestejä: nopeus- ja matkatiedot sekä diagnostiikkatiedot Virhetilassa lähetetään virheviesti Yksi pääajastin joka aikatauluttaa toiminnot Mikrokontrollerin voi ohjelmoida sekä ISP-väylän että RS-232 väylän kautta
12 Virheistä oppii Kun suunnittelu oli valmis ja ensimmäinen levy valmistettiin, alkoi tapahtua kummia Ohjelmointi ei toimi ISP-liittimen pinnijärjestys väärä Enkooderin lukeminen ei onnistu Enkooderi kytketty pinniin, joka ei tue keskeytyksiä H-silta ei toimi MOSFET:ien pinnijärjestys väärä Ajovirran mittaus ei toimi Vastus kytketty väärin
13 Ajankäyttö Projekti valmistui kutakuinkin aikataulussa, mutta työmäärä oli paljon oletettua suurempi. Lähes kaikissa työvaiheissa kului oletettua enemmän aikaa Pääasiallisena syynä ongelmien selvittämiseen ja korjaamiseen kulunut aika Levystä jouduttiin tekemään kolme eri versiota, joista viimeisin toimii
14 Ajankäyttö


15 Lopputulos Kontrolleri toimii ja tekee mitä pitääkin
16

17 Mitä opittiin Elektroniikkasuunnittelun perusteet Käytännön rakentelua, kolvausta, vianetsintää Ohjelman suunnittelu ja toteutus mikrokontrollerille Verkotetussa järjestelmässä toimivan kontrollerin toimintaperiaatteet Itseluottamusta siihen, että myös koneinsinööri pystyy kuin pystyykin tekemään toimivaa elekrtoniikkaa
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt. Projektisuunnitelma. Peltorobotin akselimoduulin ohjain
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Projektisuunnitelma Peltorobotin akselimoduulin ohjain Joni Rannisto Janne Hafrén Matti Koskinen 31.1.2012 1 1. Projektin tavoite Projektin tavoitteena
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Projektisuunnitelma Peltorobotin akselimoduulin ohjain Joni Rannisto Janne Hafrén Matti Koskinen 31.1.2012 1 1. Projektin tavoite Projektin tavoitteena
AS Automaatio- ja systeemitekniikan projektityöt
 3/19/2012 AALTO- YLIOPISTO AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Joni Rannisto Matti Koskinen Janne Hafrén 1. Projektin tavoite Projektin tavoitteena on rakentaa akselimoduulin ohjain
3/19/2012 AALTO- YLIOPISTO AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Joni Rannisto Matti Koskinen Janne Hafrén 1. Projektin tavoite Projektin tavoitteena on rakentaa akselimoduulin ohjain
S14 09 Sisäpeltorobotti AS Automaatio ja systeemitekniikan projektityöt. Antti Kulpakko, Mikko Ikonen
 S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS Automaatio ja systeemitekniikan projektityöt. Antti Kulpakko, Mikko Ikonen
 S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
Projektityöt. Sami Alaiso, Jyri Lujanen 30. marraskuuta 2009
 Projektityöt Sami Alaiso, Jyri Lujanen 30. marraskuuta 2009 1 1 Yleistä Projektityön tarkoituksena oli suunnitella ja toteuttaa yleiskäyttöinen CAN-ohjain, jolla voidaan vastaanottaa viestejä CAN-väylältä,
Projektityöt Sami Alaiso, Jyri Lujanen 30. marraskuuta 2009 1 1 Yleistä Projektityön tarkoituksena oli suunnitella ja toteuttaa yleiskäyttöinen CAN-ohjain, jolla voidaan vastaanottaa viestejä CAN-väylältä,
A11-02 Infrapunasuodinautomatiikka kameralle
 A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
Projektisuunnitelma. Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys
 1 Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys Muutoshistoria Versionumero Pvm Selitys Tekijä(t) 0.1 18.9.2012 Otso Saarentaus 2 Sisällysluettelo 1 PROJEKTIN SISÄLTÖ... 3 1.1 TAUSTA......3
1 Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys Muutoshistoria Versionumero Pvm Selitys Tekijä(t) 0.1 18.9.2012 Otso Saarentaus 2 Sisällysluettelo 1 PROJEKTIN SISÄLTÖ... 3 1.1 TAUSTA......3
LUMA SUOMI -kehittämisohjelma LUMA FINLAND -utvecklingsprogram LUMA FINLAND development programme Ohjelmointia Arduinolla
 Ohjelmointia Arduinolla Kyösti Blinnikka, Olarin koulu ja lukio LUMA-keskus Aalto Mikä on Arduino? Open Source Electronics Prototyping Platform Arduino on avoimeen laitteistoon ja ohjelmistoon perustuva
Ohjelmointia Arduinolla Kyösti Blinnikka, Olarin koulu ja lukio LUMA-keskus Aalto Mikä on Arduino? Open Source Electronics Prototyping Platform Arduino on avoimeen laitteistoon ja ohjelmistoon perustuva
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
Puhallinmoottorinohjaimen käsipäätteen käyttöohje, TBLZ-2-75, SILVER C
 Puhallinmoottorinohjaimen käsipäätteen käyttöohje, TBLZ-2-75, SILVER C 1. Yleistä Käsipäätettä käytetään SILVER C:n moottoriparametrien asettamiseen. 2. Asennus Käsipääte voidaan ripustaa mukana toimitettuun
Puhallinmoottorinohjaimen käsipäätteen käyttöohje, TBLZ-2-75, SILVER C 1. Yleistä Käsipäätettä käytetään SILVER C:n moottoriparametrien asettamiseen. 2. Asennus Käsipääte voidaan ripustaa mukana toimitettuun
S11-09 Control System for an. Autonomous Household Robot Platform
 S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
Electric power steering
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Electric power steering Ohjausmoottorin jäähdytys ja ylikuumenemisen esto Väliraportti 15.10.2014 Työn ohjaaja: Ville Matikainen Tekijät: Samppa
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Electric power steering Ohjausmoottorin jäähdytys ja ylikuumenemisen esto Väliraportti 15.10.2014 Työn ohjaaja: Ville Matikainen Tekijät: Samppa
S13-02 Linear motor controller for CAN-bus
 S13-02 Linear motor controller for CAN-bus Projektisuunnitelman väliraportti AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Anna Vaskuri Jere Liukkonen 25.3.2013 Sisällysluettelo 1 Projektityön
S13-02 Linear motor controller for CAN-bus Projektisuunnitelman väliraportti AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Anna Vaskuri Jere Liukkonen 25.3.2013 Sisällysluettelo 1 Projektityön
Q = pienin suunniteltu ilmamäärä ja k = puhaltimen tai iirispellin k-arvo.
 V1..12(1.1.215) 1 (6) Tämä ohje on tarkoitettu laitteille, joiden ohjelmistoversio on 1..12 tai uudempi. ILMAMÄÄRÄN MITTAUS Ilmamäärä voidaan mitata: 1. Virtausmittausliitännöillä varustetuista puhaltimista.
V1..12(1.1.215) 1 (6) Tämä ohje on tarkoitettu laitteille, joiden ohjelmistoversio on 1..12 tai uudempi. ILMAMÄÄRÄN MITTAUS Ilmamäärä voidaan mitata: 1. Virtausmittausliitännöillä varustetuista puhaltimista.
Pienitehoisen keinokuorman suunnittelu ja rakentaminen. AS Automaation ja systeemitekniikan projektityöt Lauri Mäkelä, Henrik Vento 4.2.
 Pienitehoisen keinokuorman suunnittelu ja rakentaminen AS-0.300 Automaation ja systeemitekniikan projektityöt Lauri Mäkelä, Henrik Vento 4..05 Tehtävänanto Pienitehoinen keinokuorma polttokennotutkimusta
Pienitehoisen keinokuorman suunnittelu ja rakentaminen AS-0.300 Automaation ja systeemitekniikan projektityöt Lauri Mäkelä, Henrik Vento 4..05 Tehtävänanto Pienitehoinen keinokuorma polttokennotutkimusta
Mikrokontrollerikitit - väliraportti
 Mikrokontrollerikitit - väliraportti AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Hannu Leppinen 78673R Petri Niemelä 221643 Markus Peltola 84765H 27.3.2013 Työn kuvaus Projektityön tarkoituksena
Mikrokontrollerikitit - väliraportti AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Hannu Leppinen 78673R Petri Niemelä 221643 Markus Peltola 84765H 27.3.2013 Työn kuvaus Projektityön tarkoituksena
Electric power steering
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Electric power steering Ohjausmoottorin jäähdytys ja ylikuumenemisen esto Projektisuunnitelma 19.9.2014 Työn ohjaaja: Ville Matikainen Tekijät: Samppa
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Electric power steering Ohjausmoottorin jäähdytys ja ylikuumenemisen esto Projektisuunnitelma 19.9.2014 Työn ohjaaja: Ville Matikainen Tekijät: Samppa
dupol.eu - smart home product comparison
 DUPOL KFT HUNGARY SINGULAR WIFI WIFI alarm communicator for signal to smartphone App, working with any alarm panel Connection to alarm panel through Ring/Tip terminals (emulates phone line) Forwards Contact
DUPOL KFT HUNGARY SINGULAR WIFI WIFI alarm communicator for signal to smartphone App, working with any alarm panel Connection to alarm panel through Ring/Tip terminals (emulates phone line) Forwards Contact
FYSE301(Elektroniikka(1(A3osa,(kevät(2013(
 FYSE301(Elektroniikka(1(A3osa,(kevät(2013( 1/2 Loppukoe1.3.2013 vastaakaikkiinkysymyksiin(yhteensä48pistettä) 1. Kuvailelyhyesti a. Energialineaarisissapiirielementeissä:vastuksessa,kondensaattorissajakelassa(3
FYSE301(Elektroniikka(1(A3osa,(kevät(2013( 1/2 Loppukoe1.3.2013 vastaakaikkiinkysymyksiin(yhteensä48pistettä) 1. Kuvailelyhyesti a. Energialineaarisissapiirielementeissä:vastuksessa,kondensaattorissajakelassa(3
A13-03 Kaksisuuntainen akkujen tasauskortti. Projektisuunnitelma. Automaatio- ja systeemitekniikan projektityöt AS-0.
 A13-03 Kaksisuuntainen akkujen tasauskortti Projektisuunnitelma Automaatio- ja systeemitekniikan projektityöt AS-0.3200 Syksy 2013 Arto Mikola Aku Kyyhkynen 25.9.2013 Sisällysluettelo Sisällysluettelo...
A13-03 Kaksisuuntainen akkujen tasauskortti Projektisuunnitelma Automaatio- ja systeemitekniikan projektityöt AS-0.3200 Syksy 2013 Arto Mikola Aku Kyyhkynen 25.9.2013 Sisällysluettelo Sisällysluettelo...
Power Steering for ATV
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Power Steering for ATV 15.1. - Loppuraportti Työn valvoja: Ville Matikainen Projektin tekijät: Juuso Meriläinen Antti Alakiikonen Aleksi Vulli Juuso
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Power Steering for ATV 15.1. - Loppuraportti Työn valvoja: Ville Matikainen Projektin tekijät: Juuso Meriläinen Antti Alakiikonen Aleksi Vulli Juuso
AS Automaatio ja systeemitekniikan projektityöt A13 10 Radio ohjattavan pienoismallin ohjausjärjestelmän ja käyttöliittymän kehittäminen
 Väliraportti AS 0.3200 Automaatio ja systeemitekniikan projektityöt A13 10 Radio ohjattavan pienoismallin ohjausjärjestelmän ja käyttöliittymän kehittäminen Toni Liski, Konsta Hölttä, Lasse Kortetjärvi
Väliraportti AS 0.3200 Automaatio ja systeemitekniikan projektityöt A13 10 Radio ohjattavan pienoismallin ohjausjärjestelmän ja käyttöliittymän kehittäminen Toni Liski, Konsta Hölttä, Lasse Kortetjärvi
MODBUS -väyläohjaus DITRONIC TOUCH -KOSKETUSNÄYTTÖ. s-posti:
 MODBUS -väyläohjaus DITRONIC TOUCH -KOSKETUSNÄYTTÖ s-posti: seroco@seroco.fi www.seroco.fi Tässä oppaassa kuvataan Ditronic Touch -kosketusnäytön liittäminen Modbus/RTU:hun RS485- sarjaliikenteen kautta
MODBUS -väyläohjaus DITRONIC TOUCH -KOSKETUSNÄYTTÖ s-posti: seroco@seroco.fi www.seroco.fi Tässä oppaassa kuvataan Ditronic Touch -kosketusnäytön liittäminen Modbus/RTU:hun RS485- sarjaliikenteen kautta
A11-02 Infrapunasuodinautomatiikka kameralle
 A11-02 Infrapunasuodinautomatiikka kameralle Väliraportti 21.3.2012 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo 1. Projektityön tavoite 1.1 Piirisuunnittelu
A11-02 Infrapunasuodinautomatiikka kameralle Väliraportti 21.3.2012 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo 1. Projektityön tavoite 1.1 Piirisuunnittelu
KÄYTTÖOHJE HLS 35. Versio 1.1 25.5.2010 1 (6) TOIMINTOKAAVIO
 TOIMINTOKAAVIO") KÄYTTÖOHJE HLS 35 Versio 1.1 25.5.2010 1 (6) TOIMINTOKAAVIO HLS 35 säädin on suunniteltu erityisesti huonekohtaiseen lattialämmitys/jäähdytys käyttöön. Säätimen avulla on mahdollista hyödyntää lattiajäähdytystä
KÄYTTÖOHJE HLS 35 Versio 1.1 25.5.2010 1 (6) TOIMINTOKAAVIO HLS 35 säädin on suunniteltu erityisesti huonekohtaiseen lattialämmitys/jäähdytys käyttöön. Säätimen avulla on mahdollista hyödyntää lattiajäähdytystä
A13-03 Kaksisuuntainen akkujen tasauskortti. Väliaikaraportti. Automaatio- ja systeemitekniikan projektityöt AS Syksy 2013
 A13-03 Kaksisuuntainen akkujen tasauskortti Väliaikaraportti Automaatio- ja systeemitekniikan projektityöt AS-0.3200 Syksy 2013 Arto Mikola Aku Kyyhkynen 22.10.2013 Sisällysluettelo Sisällysluettelo...
A13-03 Kaksisuuntainen akkujen tasauskortti Väliaikaraportti Automaatio- ja systeemitekniikan projektityöt AS-0.3200 Syksy 2013 Arto Mikola Aku Kyyhkynen 22.10.2013 Sisällysluettelo Sisällysluettelo...
Arduino. Kimmo Silvonen (X)
") Arduino Kimmo Silvonen (X) Arduino, toimiva oma versio (osat Pajalla) ATmega 328P IC DIL-kotelossa (DIP) päältä katsottuna, Arduinon pinnit +5 V TX RX DTR FT232 10k 22p 22p Reset 1 RX D0 TX D1 D2 PWM D3
Arduino Kimmo Silvonen (X) Arduino, toimiva oma versio (osat Pajalla) ATmega 328P IC DIL-kotelossa (DIP) päältä katsottuna, Arduinon pinnit +5 V TX RX DTR FT232 10k 22p 22p Reset 1 RX D0 TX D1 D2 PWM D3
Prosessiautomaatiota LabVIEW lla NI Days 2012. 31.10.2012 NI Days 2012 - LabVIEW DCS 1
 Prosessiautomaatiota LabVIEW lla NI Days 2012 31.10.2012 NI Days 2012 - LabVIEW DCS 1 Esityksen sisältö Prosessiautomaation vaatimuksia Tarpeelliset toimilohkot Automaatiosovelluksen suunnittelu LabVIEW
Prosessiautomaatiota LabVIEW lla NI Days 2012 31.10.2012 NI Days 2012 - LabVIEW DCS 1 Esityksen sisältö Prosessiautomaation vaatimuksia Tarpeelliset toimilohkot Automaatiosovelluksen suunnittelu LabVIEW
KÄYTTÖOHJE PEL 1000 / PEL 1000-M
 V1.0 (19.02.2015) 1 (8) KÄYTTÖÖNOTTO Asennus - Lähetin tulisi asentaa mittauskohdan yläpuolelle kondensoitumisongelmien välttämiseksi. - Kanavan ylipaine mitataan siten, että kanavan mittayhde yhdistetään
V1.0 (19.02.2015) 1 (8) KÄYTTÖÖNOTTO Asennus - Lähetin tulisi asentaa mittauskohdan yläpuolelle kondensoitumisongelmien välttämiseksi. - Kanavan ylipaine mitataan siten, että kanavan mittayhde yhdistetään
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
Yhtiön nimi: - Luotu: - Puhelin: - Fax: - Päiväys: -
 Positio Laske Kuvaus 1 MAGNA 32-1 N Tuote No.: 98117 Huom.! Tuotteen kuva voi poiketa todellisesta tuotteesta The pump is of the canned rotor type, i.e. pump and motor form an integral unit without shaft
Positio Laske Kuvaus 1 MAGNA 32-1 N Tuote No.: 98117 Huom.! Tuotteen kuva voi poiketa todellisesta tuotteesta The pump is of the canned rotor type, i.e. pump and motor form an integral unit without shaft
S SÄHKÖTEKNIIKKA JA ELEKTRONIIKKA
 S-55.00 SÄHKÖTKNKKA JA LKTONKKA. välikoe 3.0.2006. Saat vastata vain neljään tehtävään!. Laske jännite U. = =4Ω, 3 =2Ω, = =2V, J =2A, J 2 =3A + J 2 + J 3 2. Kondensaattori on aluksi varautunut jännitteeseen
S-55.00 SÄHKÖTKNKKA JA LKTONKKA. välikoe 3.0.2006. Saat vastata vain neljään tehtävään!. Laske jännite U. = =4Ω, 3 =2Ω, = =2V, J =2A, J 2 =3A + J 2 + J 3 2. Kondensaattori on aluksi varautunut jännitteeseen
LED nauha säädin + ohjain REVAL BULB 1 kanal 12V langaton 12-24V 96W IP20 (12837)
") LED nauha säädin + ohjain REVAL BULB 1 kanal 12V langaton 12-24V 96W IP20 (12837) tuotekoodi: 12837 merkki: REVAL BULB teho: 96W virranotto: 8A kotelointiluokka: IP20 korkeus: 30mm leveys: 56mm pituus:
LED nauha säädin + ohjain REVAL BULB 1 kanal 12V langaton 12-24V 96W IP20 (12837) tuotekoodi: 12837 merkki: REVAL BULB teho: 96W virranotto: 8A kotelointiluokka: IP20 korkeus: 30mm leveys: 56mm pituus:
C449 Liitin automaattivaihteistoa ja perävaunuliitäntää varten
 Yleistä liittimestä C449 Yleistä liittimestä C449 C449 on 18-napainen liitin, jonka avulla päästään hallitsemaan automaattivaihteiston ja perävaunuliitäntöjen toimintoja. Lisätietoja automaattivaihteiston
Yleistä liittimestä C449 Yleistä liittimestä C449 C449 on 18-napainen liitin, jonka avulla päästään hallitsemaan automaattivaihteiston ja perävaunuliitäntöjen toimintoja. Lisätietoja automaattivaihteiston
S12-02 Infrapunasuodinautomatiikka kameralle
 S12-02 Infrapunasuodinautomatiikka kameralle 18.1 27.5.2012 AS-0.3200 Automaatio- ja systeemitekniikan projektityö (4op) Lassi Seppälä Johan Dahl Ohjaaja: Heikki Hyyti Sisällysluettelo 1. Projektityön
S12-02 Infrapunasuodinautomatiikka kameralle 18.1 27.5.2012 AS-0.3200 Automaatio- ja systeemitekniikan projektityö (4op) Lassi Seppälä Johan Dahl Ohjaaja: Heikki Hyyti Sisällysluettelo 1. Projektityön
A14-11 Potilaan mittaustiedon siirtäminen matkapuhelimeen
 1 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A14-11 Potilaan mittaustiedon siirtäminen matkapuhelimeen Projektisuunnitelma Tommi Salminen, Hanna Ukkola, Olli Törmänen 19.09.2014 1 Projektin
1 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A14-11 Potilaan mittaustiedon siirtäminen matkapuhelimeen Projektisuunnitelma Tommi Salminen, Hanna Ukkola, Olli Törmänen 19.09.2014 1 Projektin
EC-huippuimuri. EC-huippuimuri
 EC-huippuimuri EC-huippuimuri EC-huippuimuri Materiaali ja rakenne Puhaltimen vaippa on valmistettu AluZink-pinnoitetusta teräslevystä. Puhallussuunta on ylöspäin. Moottori ja siipipyörä Siipipyörä on
EC-huippuimuri EC-huippuimuri EC-huippuimuri Materiaali ja rakenne Puhaltimen vaippa on valmistettu AluZink-pinnoitetusta teräslevystä. Puhallussuunta on ylöspäin. Moottori ja siipipyörä Siipipyörä on
Automaation elektroniikka T103403, 3 op AUT2sn. Pekka Rantala syksy Opinto-opas 2012
 Automaation elektroniikka T103403, 3 op AUT2sn Pekka Rantala syksy 2013 Opinto-opas 2012 Osaamistavoitteet: Opintojakso perehdyttää opiskelijat automaatiotekniikan sovelluksissa käytettäviin elektroniikan
Automaation elektroniikka T103403, 3 op AUT2sn Pekka Rantala syksy 2013 Opinto-opas 2012 Osaamistavoitteet: Opintojakso perehdyttää opiskelijat automaatiotekniikan sovelluksissa käytettäviin elektroniikan
S SÄHKÖTEKNIIKKA Kimmo Silvonen
 S-55.13 SÄHKÖTKNKK 1.1.5 Kimmo Silvonen Tentti: tehtävät 1,3,4,8,9 1. välikoe: tehtävät 1,,3,4,5. välikoe: tehtävät 6,7,8,9,1 Tässä kokeessa on myös välikoeuusinta, koska joulukuussa ei ollut tilaa tentille.
S-55.13 SÄHKÖTKNKK 1.1.5 Kimmo Silvonen Tentti: tehtävät 1,3,4,8,9 1. välikoe: tehtävät 1,,3,4,5. välikoe: tehtävät 6,7,8,9,1 Tässä kokeessa on myös välikoeuusinta, koska joulukuussa ei ollut tilaa tentille.
Power Steering for ATV
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Power Steering for ATV 27.1.2014 Juuso Meriläinen Antti Alakiikonen Aleksi Vulli Meriläinen, Vulli, Alakiikonen 1/6 Projektin tavoite Projektityössä
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Power Steering for ATV 27.1.2014 Juuso Meriläinen Antti Alakiikonen Aleksi Vulli Meriläinen, Vulli, Alakiikonen 1/6 Projektin tavoite Projektityössä
Prosessiautomaatiota LabVIEW lla NI Days NI Days LabVIEW DCS 1
 Prosessiautomaatiota LabVIEW lla NI Days 2011 12.10.2011 NI Days 2011 - LabVIEW DCS 1 Esityksen sisältö Prosessiautomaation vaatimuksia Tarpeelliset toimilohkot Automaatiosovelluksen suunnittelu LabVIEW
Prosessiautomaatiota LabVIEW lla NI Days 2011 12.10.2011 NI Days 2011 - LabVIEW DCS 1 Esityksen sisältö Prosessiautomaation vaatimuksia Tarpeelliset toimilohkot Automaatiosovelluksen suunnittelu LabVIEW
1 YLEISTÄ. Taitaja2002, Imatra Teollisuuselektroniikkatyö Protorakentelu 1.1 PROJEKTIN TARKOITUS
 Taitaja2002, Imatra Teollisuuselektroniikkatyö Protorakentelu 1 YLEISTÄ 1.1 PROJEKTIN TARKOITUS Tämä projekti on mikrokontrollerilla toteutettu lämpötilan seuranta kortti. Kortti kerää lämpöantureilta
Taitaja2002, Imatra Teollisuuselektroniikkatyö Protorakentelu 1 YLEISTÄ 1.1 PROJEKTIN TARKOITUS Tämä projekti on mikrokontrollerilla toteutettu lämpötilan seuranta kortti. Kortti kerää lämpöantureilta
Superintend VR-16 Vikavirtarele 5-johdinverkkoihin Lyhyt käyttöohje
 Superintend VR-16 Vikavirtarele 5-johdinverkkoihin Lyhyt käyttöohje Revisio Historia: Versio 1.0 Uusi dokumentti Versio 1.1 - Sisällysluettelo 1 Johdanto... 2 2 Menu valinnat... 2 2.1 Limit Menu ( L )...
Superintend VR-16 Vikavirtarele 5-johdinverkkoihin Lyhyt käyttöohje Revisio Historia: Versio 1.0 Uusi dokumentti Versio 1.1 - Sisällysluettelo 1 Johdanto... 2 2 Menu valinnat... 2 2.1 Limit Menu ( L )...
Harjoitustyö - Mikroprosessorit Liikennevalot
 Saku Chydenius tammikuu 2004 Asko Ikävalko Harjoitustyö - Mikroprosessorit Liikennevalot Työn valvoja: Kimmo Saurén RAPORTTI 1(8) 1. Alkuperäinen tehtävänanto 2. Määritelmä valojen vaihtumiselle Muodosta
Saku Chydenius tammikuu 2004 Asko Ikävalko Harjoitustyö - Mikroprosessorit Liikennevalot Työn valvoja: Kimmo Saurén RAPORTTI 1(8) 1. Alkuperäinen tehtävänanto 2. Määritelmä valojen vaihtumiselle Muodosta
HITSAUKSEN TUOTTAVUUSRATKAISUT
 Kemppi ARC YOU GET WHAT YOU MEASURE OR BE CAREFUL WHAT YOU WISH FOR HITSAUKSEN TUOTTAVUUSRATKAISUT Puolitetaan hitsauskustannukset seminaari 9.4.2008 Mikko Veikkolainen, Ratkaisuliiketoimintapäällikkö
Kemppi ARC YOU GET WHAT YOU MEASURE OR BE CAREFUL WHAT YOU WISH FOR HITSAUKSEN TUOTTAVUUSRATKAISUT Puolitetaan hitsauskustannukset seminaari 9.4.2008 Mikko Veikkolainen, Ratkaisuliiketoimintapäällikkö
S12-11. Portaalinosturi AS-0.3200. Projektisuunnitelma 2012. Oleg Kovalev
 S12-11 Portaalinosturi AS-0.3200 Projektisuunnitelma 2012 Oleg Kovalev Sisällys 1. Työn tavoite... 3 2. Projektin osa-alueet... 3 2.1. Suunnittelu... 3 2.2. Komponenttien hankinta... 3 2.3. Valmistus...
S12-11 Portaalinosturi AS-0.3200 Projektisuunnitelma 2012 Oleg Kovalev Sisällys 1. Työn tavoite... 3 2. Projektin osa-alueet... 3 2.1. Suunnittelu... 3 2.2. Komponenttien hankinta... 3 2.3. Valmistus...
Hammastankohissin modernisointi. Heikki Laitasalmi
 Hammastankohissin modernisointi Heikki Laitasalmi Loppudemossa Mitä oltiinkaan tekemässä V-malli Modbus viestintä (PLC VFD) Esitellään laitteet Lopuksi Modbusia käytännössä Hammastankohissi Arkkitehtuuri
Hammastankohissin modernisointi Heikki Laitasalmi Loppudemossa Mitä oltiinkaan tekemässä V-malli Modbus viestintä (PLC VFD) Esitellään laitteet Lopuksi Modbusia käytännössä Hammastankohissi Arkkitehtuuri
s 21.02.2005/BA 1(8) taajuusmuuttajalla
 taajuusmuuttajalla") s../ba () MM/MM- taajuusmuuttajalla Micro Master MM-taajuusmuuttajassa on sisäänrakennettu PID-säädin (MM, PI-säädin) jonka avulla voidaan ohjata erilaisia prosessisuureita kuten pinnakorkeuden-, paineen-,
s../ba () MM/MM- taajuusmuuttajalla Micro Master MM-taajuusmuuttajassa on sisäänrakennettu PID-säädin (MM, PI-säädin) jonka avulla voidaan ohjata erilaisia prosessisuureita kuten pinnakorkeuden-, paineen-,
LED- päivyrinäyttö. 1: Anssi Kalliomäki, Marko Virtanen, Tomas Truedsson, Petri Syvälähde
 1: Anssi Kalliomäki, Marko Virtanen, Tomas Truedsson, Petri Syvälähde LED- päivyrinäyttö Ohjeet on kirjoitettu sinisellä. Poista ne lopullisesta dokumentista ja korvaa oikeilla tiedoilla. Sisällys Lyhenteet
1: Anssi Kalliomäki, Marko Virtanen, Tomas Truedsson, Petri Syvälähde LED- päivyrinäyttö Ohjeet on kirjoitettu sinisellä. Poista ne lopullisesta dokumentista ja korvaa oikeilla tiedoilla. Sisällys Lyhenteet
Peltorobottikilpailu Joonas Ryynänen (C) Perttu Heikkilä Ville Matikainen Mikko Vihlman
 Perttu Heikkilä Ville Matikainen Mikko Vihlman") Peltorobottikilpailu 2011 Joonas Ryynänen (C) Perttu Heikkilä Ville Matikainen Mikko Vihlman Peltorobottikilpailu (2003-) Neljä kertaa Hollannissa Kolme kertaa Saksassa 2011 kilpailu kesä-heinäkuussa Tanskassa
Peltorobottikilpailu 2011 Joonas Ryynänen (C) Perttu Heikkilä Ville Matikainen Mikko Vihlman Peltorobottikilpailu (2003-) Neljä kertaa Hollannissa Kolme kertaa Saksassa 2011 kilpailu kesä-heinäkuussa Tanskassa
Puhallinmoottorinohjaimen käsipäätteen käyttöohje, TBLZ- 1-75, SILVER C
 Puhallinmoottorinohjaimen käsipäätteen käyttöohje, TBLZ- 1-75, SILVER C 1. Yleistä Käsipäätettä käytetään SILVER C:n moottoriparametrien asettamiseen. 2. Asennus Käsipääte voidaan ripustaa mukana toimitettuun
Puhallinmoottorinohjaimen käsipäätteen käyttöohje, TBLZ- 1-75, SILVER C 1. Yleistä Käsipäätettä käytetään SILVER C:n moottoriparametrien asettamiseen. 2. Asennus Käsipääte voidaan ripustaa mukana toimitettuun
OMNIA OPINNÄYTETYÖ AMMATTIOPISTO. Diginoppa ICTP09SLG OMNIAN AMMATTIOPISTO
 OMNIA AMMATTIOPISTO OPINNÄYTETYÖ Diginoppa ICTP09SLG - 2012 OMNIAN AMMATTIOPISTO KOULUTUSALA Tieto- ja tietoliikennetekniikka OPISKELIJA Hannu Junno OHJAAJA Jari Laurila VUOSI 2012 2 TIIVISTELMÄ Opinnäytetyöni
OMNIA AMMATTIOPISTO OPINNÄYTETYÖ Diginoppa ICTP09SLG - 2012 OMNIAN AMMATTIOPISTO KOULUTUSALA Tieto- ja tietoliikennetekniikka OPISKELIJA Hannu Junno OHJAAJA Jari Laurila VUOSI 2012 2 TIIVISTELMÄ Opinnäytetyöni
A13-03 Kaksisuuntainen akkujen tasauskortti. Loppuraportti. Automaatio- ja systeemitekniikan projektityöt AS Syksy 2013
 A13-03 Kaksisuuntainen akkujen tasauskortti Loppuraportti Automaatio- ja systeemitekniikan projektityöt AS-0.3200 Syksy 2013 Arto Mikola Aku Kyyhkynen 5.12.2013 Sisällysluettelo Sisällysluettelo... 2 1
A13-03 Kaksisuuntainen akkujen tasauskortti Loppuraportti Automaatio- ja systeemitekniikan projektityöt AS-0.3200 Syksy 2013 Arto Mikola Aku Kyyhkynen 5.12.2013 Sisällysluettelo Sisällysluettelo... 2 1
Moduloivat toimimoottorit AME 10, AME 20, AME 30 AME 13, AME 23, AME 33 - jousipalautteinen
 Moduloivat toimimoottorit AME 10, AME 20, AME 30 AME 13, AME 23, AME 33 - jousipalautteinen Kuvaus AME 10 AME 13 AME 20, AME 30 AME 23, AME 33 Toimimoottoreita on saatavsa moduloiviin säätölaitteiin Y-signaalilla
Moduloivat toimimoottorit AME 10, AME 20, AME 30 AME 13, AME 23, AME 33 - jousipalautteinen Kuvaus AME 10 AME 13 AME 20, AME 30 AME 23, AME 33 Toimimoottoreita on saatavsa moduloiviin säätölaitteiin Y-signaalilla
S SÄHKÖTEKNIIKKA JA ELEKTRONIIKKA
 S-55.00 SÄHKÖTKNKK LKTRONKK. välikoe 0.3.006. Saat vastata vain neljään tehtävään!. Laske jännite U. R = =Ω, R 3 =3Ω, = =4V, 3 =6V, = + R + R 3 + U 3. Konkka on varautunut jännitteeseen u C (0) =. Kytkin
S-55.00 SÄHKÖTKNKK LKTRONKK. välikoe 0.3.006. Saat vastata vain neljään tehtävään!. Laske jännite U. R = =Ω, R 3 =3Ω, = =4V, 3 =6V, = + R + R 3 + U 3. Konkka on varautunut jännitteeseen u C (0) =. Kytkin
Salasanan vaihto uuteen / How to change password
 Salasanan vaihto uuteen / How to change password Sisällys Salasanakäytäntö / Password policy... 2 Salasanan vaihto verkkosivulla / Change password on website... 3 Salasanan vaihto matkapuhelimella / Change
Salasanan vaihto uuteen / How to change password Sisällys Salasanakäytäntö / Password policy... 2 Salasanan vaihto verkkosivulla / Change password on website... 3 Salasanan vaihto matkapuhelimella / Change
Automaation elektroniikka T103403, 3 op SAU14snS. Pekka Rantala kevät 2016
 Automaation elektroniikka T103403, 3 op SAU14snS Pekka Rantala kevät 2016 Opinto-opas 2014 Osaamistavoitteet: Opintojakso perehdyttää opiskelijat automaatiotekniikan sovelluksissa käytettäviin elektroniikan
Automaation elektroniikka T103403, 3 op SAU14snS Pekka Rantala kevät 2016 Opinto-opas 2014 Osaamistavoitteet: Opintojakso perehdyttää opiskelijat automaatiotekniikan sovelluksissa käytettäviin elektroniikan
TURVAVÄYLÄSEMINAARI. Erilaiset kenttäväylät ja niiden kehitys 13.11.2002. Jukka Hiltunen
 TURVAVÄYLÄSEMINAARI Erilaiset kenttäväylät ja niiden kehitys 13.11.2002 Jukka Hiltunen Miksi väylätekniikkaa? 1. luonnolliset perusteet: : kehittyneiden kenttälaitteiden ja ylemmän tason laitteiden välille
TURVAVÄYLÄSEMINAARI Erilaiset kenttäväylät ja niiden kehitys 13.11.2002 Jukka Hiltunen Miksi väylätekniikkaa? 1. luonnolliset perusteet: : kehittyneiden kenttälaitteiden ja ylemmän tason laitteiden välille
Sähköpajan elektroniikkaa
 Sähköpajan elektroniikkaa Kimmo Silvonen (X) "Virtalähde", teholähde, verkkolaite (wall-wart) Elektroniikkapiirit vaativat toimiakseen käyttöjännitteen. Paristot noin 1,5 V tai 3 V / kenno Ladattavat NiMH-akut
Sähköpajan elektroniikkaa Kimmo Silvonen (X) "Virtalähde", teholähde, verkkolaite (wall-wart) Elektroniikkapiirit vaativat toimiakseen käyttöjännitteen. Paristot noin 1,5 V tai 3 V / kenno Ladattavat NiMH-akut
Äänellä vauhtia robottiin
 Äänellä vauhtia robottiin Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla robotti, joka väistää esteitä ja kulkee sitä nopeampaa mitä kovempi ääni sen lähistöllä on. Robotti tunnistaa esteet
Äänellä vauhtia robottiin Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla robotti, joka väistää esteitä ja kulkee sitä nopeampaa mitä kovempi ääni sen lähistöllä on. Robotti tunnistaa esteet
- Käyttäjä voi valita halutun sisääntulon signaalin asetusvalikosta (esim. 0 5V, 0 10 V tai 4 20 ma)
") LE PSX DIN kisko kiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 3 numeron LED näyttö - Selkeä rakenne, yksinkertainen käyttää
LE PSX DIN kisko kiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 3 numeron LED näyttö - Selkeä rakenne, yksinkertainen käyttää
TÄYTTÖAUTOMAATIT TÄYTTÖAUTOMAATIT COMPUTER INFLATORS
 31 S AHCON computer inflators are designed with a view to high quality, precision and long service life. The inflation computers are designed in Denmark and manufactured and tested in our own workshop.
31 S AHCON computer inflators are designed with a view to high quality, precision and long service life. The inflation computers are designed in Denmark and manufactured and tested in our own workshop.
WIFI Ohjaa ilmalämpöpumppuasi älypuhelimella. TOSHIBA Home AC Control
 WIFI Ohjaa ilmalämpöpumppuasi älypuhelimella TOSHIBA Home AC Control Konfiguraatio Adapteri Yhteensopivat tuotteet Premium (SDKS9) Optimum (18,22,24k) Optimum (5,7,10,13,16k) Lattiakonsoli (10,13,18k)
WIFI Ohjaa ilmalämpöpumppuasi älypuhelimella TOSHIBA Home AC Control Konfiguraatio Adapteri Yhteensopivat tuotteet Premium (SDKS9) Optimum (18,22,24k) Optimum (5,7,10,13,16k) Lattiakonsoli (10,13,18k)
Mark Summary. Taitaja 2013. Skill Number 602 Skill Elektroniikka. Competitor Name
 Summary Skill Number 602 Skill Elektroniikka ing Scheme Lock 14-05-2013 09:16:27 Final Lock 16-05-2013 12:26:59 Criterion Criterion Description s Day 1 Day 2 Day 3 Day 4 Total Award A B C D E F Raspberry-tietokoneen
Summary Skill Number 602 Skill Elektroniikka ing Scheme Lock 14-05-2013 09:16:27 Final Lock 16-05-2013 12:26:59 Criterion Criterion Description s Day 1 Day 2 Day 3 Day 4 Total Award A B C D E F Raspberry-tietokoneen
S SÄHKÖTEKNIIKKA JA ELEKTRONIIKKA
 S-55.1100 SÄHKÖTKNIIKKA JA LKTONIIKKA 2. välikoe 14.12.2010. Saat vastata vain neljään tehtävään! Sallitut: Kako, (gr.) laskin, [MAOL], [sanakirjan käytöstä sovittava valvojan kanssa!] 1. Missä rajoissa
S-55.1100 SÄHKÖTKNIIKKA JA LKTONIIKKA 2. välikoe 14.12.2010. Saat vastata vain neljään tehtävään! Sallitut: Kako, (gr.) laskin, [MAOL], [sanakirjan käytöstä sovittava valvojan kanssa!] 1. Missä rajoissa
Huom. tämä kulma on yhtä suuri kuin ohjauskulman muutos. lasketaan ajoneuvon keskipisteen ympyräkaaren jänteen pituus
 AS-84.327 Paikannus- ja navigointimenetelmät Ratkaisut 2.. a) Kun kuvan ajoneuvon kumpaakin pyörää pyöritetään tasaisella nopeudella, ajoneuvon rata on ympyränkaaren segmentin muotoinen. Hitaammin kulkeva
AS-84.327 Paikannus- ja navigointimenetelmät Ratkaisut 2.. a) Kun kuvan ajoneuvon kumpaakin pyörää pyöritetään tasaisella nopeudella, ajoneuvon rata on ympyränkaaren segmentin muotoinen. Hitaammin kulkeva
Mark Summary. Taitaja2015. Skill Number 602 Skill Elektroniikka. Competitor Name
 Summary Skill Number 602 Skill Elektroniikka ing Scheme Lock 04-05-2015 14:54:52 Final Lock 07-05-2015 12:11:00 Criterion Criterion Description s Day 1 Day 2 Day 3 Day 4 Total Award A B C D E Piirilevysuunnittelu
Summary Skill Number 602 Skill Elektroniikka ing Scheme Lock 04-05-2015 14:54:52 Final Lock 07-05-2015 12:11:00 Criterion Criterion Description s Day 1 Day 2 Day 3 Day 4 Total Award A B C D E Piirilevysuunnittelu
NiMH Laturi. Suunnittelu Olli Haikarainen
 Suunnittelu Olli Haikarainen NiMH Laturi Ostettuani digitaalikameran totesin sen kuluttavan niin paljon virtaa että on aika siirtyä käyttämään ladattavia akkuja. Ostin neljä kappaletta 1850 ma tunnin akkuja
Suunnittelu Olli Haikarainen NiMH Laturi Ostettuani digitaalikameran totesin sen kuluttavan niin paljon virtaa että on aika siirtyä käyttämään ladattavia akkuja. Ostin neljä kappaletta 1850 ma tunnin akkuja
ZigBee-ohjaus kuorma-autolle
 ZigBee-ohjaus kuorma-autolle Juho Frits Petteri Koivumäki 10. helmikuuta 2010 Tavoitteet Projektityössä on tavoitteena rakentaa langaton ZigBee-ohjausverkko kaukoohjattavalle kuorma-autolle (kts. Kuva
ZigBee-ohjaus kuorma-autolle Juho Frits Petteri Koivumäki 10. helmikuuta 2010 Tavoitteet Projektityössä on tavoitteena rakentaa langaton ZigBee-ohjausverkko kaukoohjattavalle kuorma-autolle (kts. Kuva
HARJOITUSTYÖ: LabVIEW, Liiketunnistin
 Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: LabVIEW, Liiketunnistin Tarvittavat laitteet: PC Labview
Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: LabVIEW, Liiketunnistin Tarvittavat laitteet: PC Labview
- Käyttäjä voi valita halutun sisääntulon signaalin asetusvalikosta (esim. 0 5V, 0 10 V tai 4 20 ma)
") LE PDX DIN kiskokiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 4 numeroinen LED näyttö - Selkeä rakenne, yksinkertainen käyttää
LE PDX DIN kiskokiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 4 numeroinen LED näyttö - Selkeä rakenne, yksinkertainen käyttää
Ohjelmoitava magneettivastuksellinen kuntopyörä. LCD-Näyttö BC-81295
 Ohjelmoitava magneettivastuksellinen kuntopyörä LCD-Näyttö BC-81295 Yhteenveto Tämä on tarkoitettu ainoastaan ohjelmoitavaan magneettivastukselliseen kuntopyörään. Järjestelmään kuuluu kolme (3) osaa:
Ohjelmoitava magneettivastuksellinen kuntopyörä LCD-Näyttö BC-81295 Yhteenveto Tämä on tarkoitettu ainoastaan ohjelmoitavaan magneettivastukselliseen kuntopyörään. Järjestelmään kuuluu kolme (3) osaa:
ELEC-C1110 Automaatio- ja systeemitekniikan. Luento 11 Esimerkki automaation soveltamisesta
 ELEC-C1110 Automaatio- ja systeemitekniikan perusteet Luento 11 Esimerkki automaation soveltamisesta Tämän luennon aihe Esimerkki automaation soveltamisesta käytännössä: WorkPartner-palvelurobotti WorkPartner
ELEC-C1110 Automaatio- ja systeemitekniikan perusteet Luento 11 Esimerkki automaation soveltamisesta Tämän luennon aihe Esimerkki automaation soveltamisesta käytännössä: WorkPartner-palvelurobotti WorkPartner
Adafruit Circuit Playground Express
 Adafruit Circuit Playground Express Ulkoiset LEDit ja moottorit Sini Riikonen, sini.riikonen@helsinki.fi 6.6.2019 Adafruit Circuit Playground Express / Ledit ja moottorit / 2019 Innokas 1 Yleistä Circuit
Adafruit Circuit Playground Express Ulkoiset LEDit ja moottorit Sini Riikonen, sini.riikonen@helsinki.fi 6.6.2019 Adafruit Circuit Playground Express / Ledit ja moottorit / 2019 Innokas 1 Yleistä Circuit
HARJOITUSTYÖ: LabVIEW, Kiihtyvyysanturi
 Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: LabVIEW, Kiihtyvyysanturi Tarvittavat laitteet: PC Labview
Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: LabVIEW, Kiihtyvyysanturi Tarvittavat laitteet: PC Labview
Ilmastointilaitteen / Ilmalämpöpumpun ohjaaminen
 Mene sovelluksen etusivulle. Broadlink RM-Pro Ilmastointilaitteen / Ilmalämpöpumpun ohjaaminen Broadlink RM-Pro:n koodikirjastossa on valmiina tuhansien laitteiden infrapunakauko-ohjainten ohjainkoodit,
Mene sovelluksen etusivulle. Broadlink RM-Pro Ilmastointilaitteen / Ilmalämpöpumpun ohjaaminen Broadlink RM-Pro:n koodikirjastossa on valmiina tuhansien laitteiden infrapunakauko-ohjainten ohjainkoodit,
LYTH-CONS CONSISTENCY TRANSMITTER
 LYTH-CONS CONSISTENCY TRANSMITTER LYTH-INSTRUMENT OY has generate new consistency transmitter with blade-system to meet high technical requirements in Pulp&Paper industries. Insurmountable advantages are
LYTH-CONS CONSISTENCY TRANSMITTER LYTH-INSTRUMENT OY has generate new consistency transmitter with blade-system to meet high technical requirements in Pulp&Paper industries. Insurmountable advantages are
HBX 1:10 MonsterTruck 4WD KÄYTTÖOPAS Tuotenro. 510183
 HBX 1:10 MonsterTruck 4WD KÄYTTÖOPAS Tuotenro. 510183 OMINAISUUDET Pituus: 420 mm Leveys: 305 mm Korkeus: 200 mm Rengasväli: 255 mm Maavara: 50 mm. Renkaiden halkaisija/leveys: 130 mm/52 mm Moottori: RC550L
HBX 1:10 MonsterTruck 4WD KÄYTTÖOPAS Tuotenro. 510183 OMINAISUUDET Pituus: 420 mm Leveys: 305 mm Korkeus: 200 mm Rengasväli: 255 mm Maavara: 50 mm. Renkaiden halkaisija/leveys: 130 mm/52 mm Moottori: RC550L
KÄYTTÖOHJE PEL / PEL-M
 V2.0.0 (05.09.2014) 1 (6) KÄYTTÖÖNOTTO Asennus - Lähetin tulisi asentaa mittauskohdan yläpuolelle kondensoitumisongelmien välttämiseksi. - Kanavan ylipaine mitataan siten, että kanavan mittayhde yhdistetään
V2.0.0 (05.09.2014) 1 (6) KÄYTTÖÖNOTTO Asennus - Lähetin tulisi asentaa mittauskohdan yläpuolelle kondensoitumisongelmien välttämiseksi. - Kanavan ylipaine mitataan siten, että kanavan mittayhde yhdistetään
Taitaja semifinaali 2010, Iisalmi Jääkaapin ovihälytin
 Taitaja semifinaali 2010, Iisalmi Jääkaapin ovihälytin Ohjelmointitehtävänä on laatia ohjelma jääkaapin ovihälyttimelle. Hälytin toimii 3 V litium paristolla ja se sijoitetaan jääkaapin sisälle. Hälyttimen
Taitaja semifinaali 2010, Iisalmi Jääkaapin ovihälytin Ohjelmointitehtävänä on laatia ohjelma jääkaapin ovihälyttimelle. Hälytin toimii 3 V litium paristolla ja se sijoitetaan jääkaapin sisälle. Hälyttimen
Projektisuunnitelma. (välipalautukseen muokattu versio) Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus
 Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus") Projektisuunnitelma (välipalautukseen muokattu versio) Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus Ville Toiviainen Tomi Tuovinen Lauri af Heurlin Tavoite Projektin tarkoituksena
Projektisuunnitelma (välipalautukseen muokattu versio) Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus Ville Toiviainen Tomi Tuovinen Lauri af Heurlin Tavoite Projektin tarkoituksena
25.11.2014. Työasema- ja palvelinarkkitehtuurit IC130301. Tallennusjärjestelmät. Tallennusjärjestelmät. 5 opintopistettä.
 Työasema- ja palvelinarkkitehtuurit IC130301 5 opintopistettä Petri Nuutinen 5 opintopistettä Petri Nuutinen Tallennusjärjestelmät Tallennusjärjestelmät 1 = Small Computer System Interface, markkinoilla
Työasema- ja palvelinarkkitehtuurit IC130301 5 opintopistettä Petri Nuutinen 5 opintopistettä Petri Nuutinen Tallennusjärjestelmät Tallennusjärjestelmät 1 = Small Computer System Interface, markkinoilla
AS-0.3200 automaatio- ja systeemitekniikan projektityöt
 AS-0.3200 automaatio- ja systeemitekniikan projektityöt Yleiskäyttöinen CAN-ohjain Sami Alaiso, Jyri Lujanen Sisältö 1 Yleistä 2 1.1 Hardware............................................... 3 1.2 Software................................................
AS-0.3200 automaatio- ja systeemitekniikan projektityöt Yleiskäyttöinen CAN-ohjain Sami Alaiso, Jyri Lujanen Sisältö 1 Yleistä 2 1.1 Hardware............................................... 3 1.2 Software................................................
dupol.eu - WIFI based remote gate control unit - Hungarian product
 WIFI based remote gate control unit User manual v1.0 1 EN Basic information A is a innovative device, designed to fulfill the modern request for comfortable environment. Using a local Wi-Fi network, it
WIFI based remote gate control unit User manual v1.0 1 EN Basic information A is a innovative device, designed to fulfill the modern request for comfortable environment. Using a local Wi-Fi network, it
Radiokurssi. Modulaatiot, arkkitehtuurit, modulaattorit, ilmaisimet ja muut
 Radiokurssi Modulaatiot, arkkitehtuurit, modulaattorit, ilmaisimet ja muut Modulaatiot CW/OOK Continous Wave AM Amplitude Modulation FM Frequency Modulation SSB Single Side Band PM Phase Modulation ASK
Radiokurssi Modulaatiot, arkkitehtuurit, modulaattorit, ilmaisimet ja muut Modulaatiot CW/OOK Continous Wave AM Amplitude Modulation FM Frequency Modulation SSB Single Side Band PM Phase Modulation ASK
1 Muutokset piirilevylle
 1 Muutokset piirilevylle Seuraavat muutokset täytyvät olla piirilevylle tehtynä, jotta tätä käyttöohjetta voidaan käyttää. Jumppereiden JP5, JP6, JP7, sekä JP8 ja C201 väliltä puuttuvat signaalivedot on
1 Muutokset piirilevylle Seuraavat muutokset täytyvät olla piirilevylle tehtynä, jotta tätä käyttöohjetta voidaan käyttää. Jumppereiden JP5, JP6, JP7, sekä JP8 ja C201 väliltä puuttuvat signaalivedot on
PAVIRO End Of Line Slave Module
 PAVIRO End Of Line Slave PVA-1WEOL fi Huomautuksia asennuksesta PAVIRO End Of Line Slave Sisällysluettelo fi 3 Sisällysluettelo 1 Tietoja lyhyesti 4 2 Asennus 5 3 Tekniset tiedot 9 4 Standardit ja yhteensopivuus
PAVIRO End Of Line Slave PVA-1WEOL fi Huomautuksia asennuksesta PAVIRO End Of Line Slave Sisällysluettelo fi 3 Sisällysluettelo 1 Tietoja lyhyesti 4 2 Asennus 5 3 Tekniset tiedot 9 4 Standardit ja yhteensopivuus
S-55.1100 SÄHKÖTEKNIIKKA JA ELEKTRONIIKKA
 S-55.00 SÄHKÖKNKKA A KONKKA. välikoe 2..2008. Saat vastata vain neljään tehtävään!. aske jännite U. = 4 Ω, 2 = Ω, = Ω, = 2, 2 =, = A, 2 = U 2 2 2 2. ännitelähde tuottaa hetkestä t = t < 0 alkaen kaksiportaisen
S-55.00 SÄHKÖKNKKA A KONKKA. välikoe 2..2008. Saat vastata vain neljään tehtävään!. aske jännite U. = 4 Ω, 2 = Ω, = Ω, = 2, 2 =, = A, 2 = U 2 2 2 2. ännitelähde tuottaa hetkestä t = t < 0 alkaen kaksiportaisen
LCD SW900 Manuaali. Näytön materiaali: ABS Näytön lasi: High Hardness Acrylic (the same hardness value as tempered glass).
.") LCD SW900 Manuaali Ensin, ole aina varovainen kuin pyöräilet, käytä aina kypärää, katso aina eteenpäin/sivuille ja opi miten toiminnot toimii ennen lähtöä. Muista huoltaa pyörä ainakin kerran kuukaudessa.
LCD SW900 Manuaali Ensin, ole aina varovainen kuin pyöräilet, käytä aina kypärää, katso aina eteenpäin/sivuille ja opi miten toiminnot toimii ennen lähtöä. Muista huoltaa pyörä ainakin kerran kuukaudessa.
Travel Getting Around
 - Location Olen eksyksissä. Not knowing where you are Voisitko näyttää kartalta missä sen on? Asking for a specific location on a map Mistä täällä on? Asking for a specific...wc?...pankki / rahanvaihtopiste?...hotelli?...huoltoasema?...sairaala?...apteekki?...tavaratalo?...ruokakauppa?...bussipysäkki?
- Location Olen eksyksissä. Not knowing where you are Voisitko näyttää kartalta missä sen on? Asking for a specific location on a map Mistä täällä on? Asking for a specific...wc?...pankki / rahanvaihtopiste?...hotelli?...huoltoasema?...sairaala?...apteekki?...tavaratalo?...ruokakauppa?...bussipysäkki?
Gap-filling methods for CH 4 data
 Gap-filling methods for CH 4 data Sigrid Dengel University of Helsinki Outline - Ecosystems known for CH 4 emissions; - Why is gap-filling of CH 4 data not as easy and straight forward as CO 2 ; - Gap-filling
Gap-filling methods for CH 4 data Sigrid Dengel University of Helsinki Outline - Ecosystems known for CH 4 emissions; - Why is gap-filling of CH 4 data not as easy and straight forward as CO 2 ; - Gap-filling
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-03 USB-käyttöinen syvyysanturi 5op 13.9.2011-29.11.2011 Johan Backlund Ohjaaja: Johan Grönholm Johdanto Projektin tavoitteena oli suunnitella
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-03 USB-käyttöinen syvyysanturi 5op 13.9.2011-29.11.2011 Johan Backlund Ohjaaja: Johan Grönholm Johdanto Projektin tavoitteena oli suunnitella
Lämmitysjärjestelmät
 METSTA Rakennusten energiatehokkuusstandardit uudistuvat seminaari 26.4.2017 Lämmitysjärjestelmät Jarek Kurnitski HEAT GAINS BUILDING PROPERTIES CLIMATIC CONDITIONS INDOOR ENVIRONMENT REQUIREMENTS EN 16789-1
METSTA Rakennusten energiatehokkuusstandardit uudistuvat seminaari 26.4.2017 Lämmitysjärjestelmät Jarek Kurnitski HEAT GAINS BUILDING PROPERTIES CLIMATIC CONDITIONS INDOOR ENVIRONMENT REQUIREMENTS EN 16789-1
S-55.1100 SÄHKÖTEKNIIKKA JA ELEKTRONIIKKA
 S-55.1100 SÄHKÖTKNIIKKA JA KTONIIKKA 2. välikoe 5.5.2008. Saa vasaa vain neljään ehävään! Kimmo Silven 1. aske vira. = 1 kω, = 2 kω, 3 = 4 kω, = 10 V. Diodin ominaiskayra, aseikko 0... 4 ma + 3 Teh. 2.
S-55.1100 SÄHKÖTKNIIKKA JA KTONIIKKA 2. välikoe 5.5.2008. Saa vasaa vain neljään ehävään! Kimmo Silven 1. aske vira. = 1 kω, = 2 kω, 3 = 4 kω, = 10 V. Diodin ominaiskayra, aseikko 0... 4 ma + 3 Teh. 2.
IBC control Made in Sweden VIANETSINTÄ MICROMAX- JA VVX-MOOTTORIT
 IBC control Made in Sweden VIANETSINTÄ MICROMAX- JA VVX-MOOTTORIT Sisällysluettelo Sivu Vianetsintä MicroMax, MicroMax180, MicroMax370, MicroMax750 Ohjausyksikkö on lauennut kiertovahdin vuoksi Magneettianturin
IBC control Made in Sweden VIANETSINTÄ MICROMAX- JA VVX-MOOTTORIT Sisällysluettelo Sivu Vianetsintä MicroMax, MicroMax180, MicroMax370, MicroMax750 Ohjausyksikkö on lauennut kiertovahdin vuoksi Magneettianturin
Tekniikka ja liikenne (5) Tietoliikennetekniikan laboratorio
 Tietoliikennetekniikan laboratorio") Tekniikka ja liikenne 4.4.2011 1 (5) Tietoliikennetekniikan laboratorio Työ 1 PCM-työ Työn tarkoitus Työssä tutustutaan pulssikoodimodulaation tekniseen toteutustapaan. Samalla nähdään, miten A/Dmuunnin
Tekniikka ja liikenne 4.4.2011 1 (5) Tietoliikennetekniikan laboratorio Työ 1 PCM-työ Työn tarkoitus Työssä tutustutaan pulssikoodimodulaation tekniseen toteutustapaan. Samalla nähdään, miten A/Dmuunnin
MONITOIMIMOOTTORI EAM-30-MT EAM-52-MT ASENNUS- JA KÄYTTÖOHJE
 MONITOIMIMOOTTORI EAM-30-MT EAM-52-MT ASENNUS- JA KÄYTTÖOHJE Kaytto_ohje_EAM_A5_ver2 1. Yleistä Monitoimi venttiilimoottori tarkoittaa, että samassa laitteessa on useita toimintatapoja. Sopivat toimintatavat
MONITOIMIMOOTTORI EAM-30-MT EAM-52-MT ASENNUS- JA KÄYTTÖOHJE Kaytto_ohje_EAM_A5_ver2 1. Yleistä Monitoimi venttiilimoottori tarkoittaa, että samassa laitteessa on useita toimintatapoja. Sopivat toimintatavat
Autotallin ovi - Tehtävänanto
 Autotallin ovi - Tehtävänanto Pisteytys (max 9p): 1 piste per läpi mennyt testi (max 7p) Reflektointitehtävä (max 2p yksi piste jos osaa vastata edes osittain ja toinen piste tyhjentävästä vastauksesta)
Autotallin ovi - Tehtävänanto Pisteytys (max 9p): 1 piste per läpi mennyt testi (max 7p) Reflektointitehtävä (max 2p yksi piste jos osaa vastata edes osittain ja toinen piste tyhjentävästä vastauksesta)
////// VENETIETO.FI \\\\\\ //// Autopilotti 2014 \\\\ #include <EEPROM.h> #include <SoftwareSerial.h> SoftwareSerial gps(10, 0); // RX, TX -pinnit
; // RX, TX -pinnit") ////// VENETIETO.FI \\\\\\ //// Autopilotti 2014 \\\\ #include #include SoftwareSerial gps(10, 0); // RX, TX -pinnit const int buttonpinset = 2; // painonäppäimen pinni const
////// VENETIETO.FI \\\\\\ //// Autopilotti 2014 \\\\ #include #include SoftwareSerial gps(10, 0); // RX, TX -pinnit const int buttonpinset = 2; // painonäppäimen pinni const
ESBE CRD122. Käyttöohje. Esbe CRD122 lämmönsäädin langattomalla ohjaimella. Kompakti lämmönsäädin paketti
 Esbe CRD122 lämmönsäädin langattomalla ohjaimella ESBE CRD122 Callidus koodi 211702 Käyttöohje Kompakti lämmönsäädin paketti säädin ja langaton huoneyksikkö LCD näyttö ja yksi käyttöpainike moottoriosassa
Esbe CRD122 lämmönsäädin langattomalla ohjaimella ESBE CRD122 Callidus koodi 211702 Käyttöohje Kompakti lämmönsäädin paketti säädin ja langaton huoneyksikkö LCD näyttö ja yksi käyttöpainike moottoriosassa