KARELIA-AMMATTIKORKEAKOULU Sähkötekniikan koulutusohjelma. Toni Haaranen ABB IRB 1400 TEOLLISUUSROBOTIN KÄYTTÖÖNOTTO
|
|
|
- Tiina Hovinen
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 KARELIA-AMMATTIKORKEAKOULU Sähkötekniikan koulutusohjelma Toni Haaranen ABB IRB 1400 TEOLLISUUSROBOTIN KÄYTTÖÖNOTTO Opinnäytetyö Toukokuu 2016
2 OPINNÄYTETYÖ Toukokuu 2016 Sähkötekniikan koulutusohjelma Karjalankatu JOENSUU Tekijä Toni Haaranen Nimeke ABB IRB 1400 teollisuusrobotin käyttöönotto Toimeksiantaja Oy All-Plast Ab Tiivistelmä Tässä opinnäytetyössä oli tarkoituksena ottaa vanha ABB:n teollisuusrobotti uudelleen käyttöön tuotantoon. Opinnäytetyön toimeksiantajana toimi paikallinen yritys Oy All-Plast Ab. Yritys on ruiskuvalutekniikan suomalainen moniosaaja, joka hallitsee monet teknologiat, ja jonka palvelut ulottuvat kotimaisilta markkinoilta aina kansainvälisille markkinoille asti. Työn tarkoituksena oli selvittää ensin onko robotti enää toimintakuntoinen, ja mitä kaikkea se vaatisi taas toimiakseen. Robotin saatua toimintakuntoon tarkoituksena oli ottaa robotti tuotantoon, ja rakentaa siihen tarvittavat järjestelmät. Kieli suomi Asiasanat Sivuja 50 Liitteet 3 ABB, teollisuusrobotti, käyttöönotto

3 THESIS May 2016 Degree Programme in Electrical Engineering Author Toni Haaranen Karjalankatu JOENSUU FINLAND Title ABB IRB 1400 industrial robot introduction Commissioned by Oy All-Plast Ab Abstract The purpose of this thesis was to re-introduce an old ABB industrial robot into production. The client for this thesis was a local company Oy All- Plast Ab. The company is a Finnish multitasker in injection molding. Oy All-Plast Ab masters many technologies and its services range from the domestic market to the international market. The goal was to find out first whether the robot is still operational and what it would require to function again. When the robot was running again, the aim was to take the robot into production and build the necessary systems for it. Language Finnish Keywords Pages 50 Appendices 3 ABB, industrial robot, introduction
4 Sisältö 1 Johdanto Toimeksiantaja Oy All-Plast Ab ABB IRB 1400 teollisuusrobotin yleiskuvaus Tekniset tiedot Turvallisuus ja standardit ABB IRB 1400 teollisuusrobotin käyttöönotto Käynnistys Robotin Kalibrointi Käsinohjaus Ongelmat ABB IRB 1400 teollisuusrobotin Ohjelmointi Rutiinit Käskyt Testaus Automaattiajo Ohjelma 3x4 maton tuotantoajoon Käytännössä Ohjelman rakenne Pohdinta Lähteet Liitteet Liite 1 Liite 2 Liite 3 Robotin täyttämät standardit Käskylistat Käytettävät käskyt ja niiden selitykset
5 5 1 Johdanto Työn tarkoituksena oli ottaa käytetty ABB:n teollisuusrobotti uudelleen käyttöön tuotantoon. Robotti oli ABB IRB 1400 kuusi akselinen käsivarsirobotti, joka on tarkoitettu teollisuuskäyttöön. Robotti on valmistettu vuonna 1998, joten tämänkin myötä ongelmia oli odotettavissa. Toimeksiantaja Oy All-Plast Ab oli ostanut robotin muutama vuosi sitten toiselta yritykseltä, mutta heillä ei ole ollut resursseja eikä aikaa ottaa robottia käyttöön, joten se on ollut muutaman vuoden varastossa käyttämättömänä. Opinnäytetyön tekeminen robotin käyttöönotosta oli siis myös hyödyllinen toimeksiantajan kannalta, sillä nyt heidän resursseja ei tarvittaisi läheskään niin paljoa kuin että he ottaisivat robotin käyttöön kokonaan itse. Työ aloitettiin tarkastamalla robotin kunto, ja että se saadaan käyntiin ja toimimaan moitteetta. Kun robotin toimivuus varmistui, aloitimme miettimään sille sopivaa kohdetta. Sopivia kohteita oli muutamia, mutta päädyimme lopuksi muovimattoihin. Robotin tarkoitus oli siis asetella mattopaloja vierekkäin/limittäin, jotka sitten puristetaan puristimella toisiinsa kiinni, muodostaen näin kokonaisia muovimattoja.
6 6 2 Toimeksiantaja Oy All-Plast Ab Toimeksiantajan on Oy All-Plast Ab, joka on paikallinen ruiskuvalutekniikan suomalainen moniosaaja. Yrityksen palvelut ulottuvat kotimaisilta markkinoilta aina kansainvälisille markkinoille asti. All-Plast hallitsee monet teknologiat, monikomponenttiruiskuvalu, sekä ruiskuvalussa perinteisenruiskuvalun lisäksi komposiittiruiskuvalun. Sopimusvalmistajana palvelut ulottuvat tuotekehityksestä valmistukseen, varastointiin, pakkaamiseen ja logistiikkaan. Yrityksen asiakastoimiala on myös laaja, johon kuuluu muun muassa sähkö- ja elektroniikkateollisuutta, kauppaa, laite-, kone- ja ajoneuvorakentajia, urheiluvälinevalmistajia sekä terveydenhuoltoala. [1.] 3 ABB IRB 1400 teollisuusrobotin yleiskuvaus Työssä käytetty robotti on valmistettu vuonna 1998 ja kuuluu ABB:n käsivarsirobottivalikoimaan. Tämän päivän vastaava malli on IRB 1410, jossa on lähes täysin samat ominaisuudet kuin tässä työssä käytetyssä IRB 1400 mallissa, esim. mm. tarkkuus, ulottuvuus ja käsittely kapasiteetti. ABB on johtava teollisuusrobottien, modulaaristen valmistusjärjestelmien ja robottipalvelujen tuottaja, joka toimii kaikilla mantereilla ja yli 100 maassa, Suomi mukaan lukien. ABB:ltä löytyy robotteihin todella kattava tarjonta erilaisia palveluita. Palveluita ovat muun muassa: Teollisuusrobotit, robottihuolto ja koulutus, sovellusohjelmistot, sovellukset toimialoittain, ohjausjärjestelmät ja ohjelmistot, lisälaitteet ja varusteet, robotstudio ja robottiuutiset uutiskirje. [2.] Teollisuusrobotteja ABB:ltä löytyy kattava valikoima, joten jokaiselle asiakkaalle löytyy varmasti sopiva robotti. Teollisuusrobotit voidaan jakaa neljään kategoriaan: käsivarsi-, yhteistyö-, rinnakkaisrakenteiset- ja maalausrobotteihin (kuva 1). [3.]
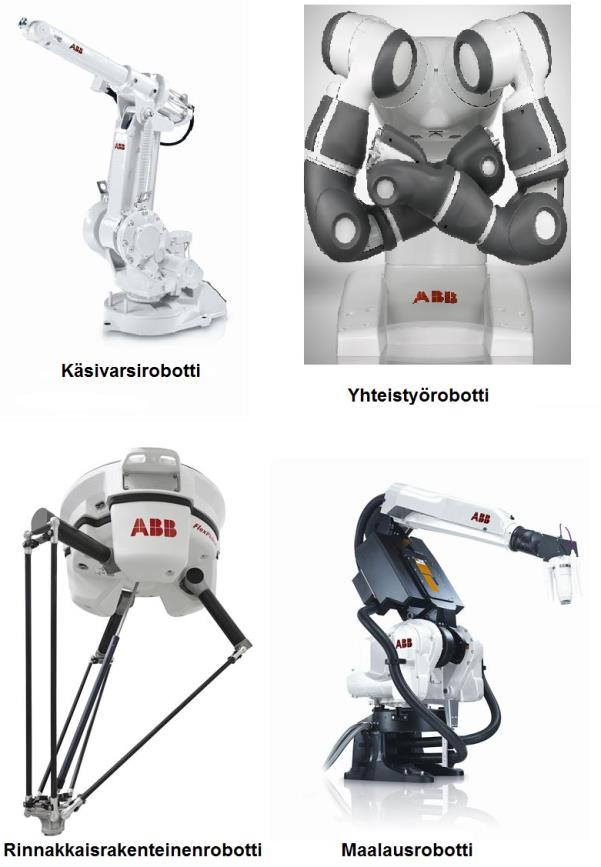
7 Kuva 1 Teollisuusrobottien tyypit 7

8 8 ABB IRB 1400 on ABB:n valmistama lattiaan asennettava teollisuuskäyttöön suunniteltu käsivarsirobotti, joka käyttää joustavaa robotti-pohjaista automaatiota. Robotin käyttöjärjestelmä on nimeltään BaseWare OS, joka hallitsee kaikkia puolia, esim. liike ohjausta, kehittämistä ja sovellusohjelmien kommunikointia jne. Robotti on avorakenteinen, joten se soveltuu hyvin joustavaan käyttöön, ja joka voi kommunikoida laajasti ulkoisten järjestelmien kanssa. Robottiin kuuluu kaksi pääosaa, ohjainkaappi ja manipulaattori (kuva2), jotka yhdistetään toisiinsa kahdella kaapelilla. Tässä IRB 1400 manipulaattorissa on 6 akselia. Akseleiden liikkeet ja nimet on esitetty kuvassa 3. Kuvassa 4 nähdään ohjainkaapin pääosat, eli S4C:n ohjausjärjestelmä, joka koostuu pääkytkimestä, ohjelmointiyksiköstä, käyttöpaneelista, sekä levyasemasta. Kuva 2 Robotin kaksi pääosaa, ohjainkaappi ja manipulaattori

9 9 Kuva 3 IRB 1400 manipulaattorin akselit ja liikkeet Kuva 4 Ohjainkaapin pääosat

10 10 Robotin kanssa voidaan kommunikoida ohjelmointiyksikköä (kuva 5) ja/tai käyttöpaneelia käyttäen (kuva 6), joka sijaitsee ohjainkaapissa. Kuvassa 5 on nimetty ohjelmointiyksikön tärkeimmät/käytetyimmät toiminnot/osat. Näytöstä nähdään tietysti kaikki tiedot, esim. ohjelmoinnin aikana. Näyttöön mahtuu 16 riviä ja jokaiselle riville mahtuu 40 merkkiä. Hätä-seis -painikkeesta saadaan robotti pysähtymään välittömästi, riippumatta järjestelmän tilasta tai käyttötavasta. Palatakseen takaisin käyttö-tilaan, on painike palautettava alkuperäiseen asentoon, ja tämän jälkeen hätä-pysäytys on vielä kuitattava painamalla käyttöpaneelin käyttö-painiketta. Ohjaussauvalla liikutetaan manipulaattorin akseleita, esim. ohjelmoitaessa robottia. Sallintalaitteella sallitaan manipulaattorin moottoreiden käyttö, jota käytetään käsinohjauksessa ja ohjelmasuorituksen aikana. Kuva 5 Ohjelmointiyksikkö

11 11 Kuvassa 6 nähdään käyttöpaneelin painikkeet ja niiden toiminnot. Käyttö - painikkeella kuitataan kaikki järjestelmässä tapahtuvat virheet tai vikakoodit. Käyttö-painikkeen valo osoittaa myös sen onko robotti käyttö-tilassa, valon palaessa jatkuvasti manipulaattorin moottorin on käytössä, kun taas valon vilkkuessa robotti on valmius-tilassa. Käyttöpaneelin hätä-seis - painike toimii samalla tavalla kuin ohjelmointiyksikössä. Käyttöajan laskuri kertoo manipulaattorin käyttöajan, eli sen ajan kun moottorit ovat käytössä. Toimintatilan valitsemalla valitaan haluttu toimintatila. Automaattitilaa toisin sanoen tuotantotilaa käytetään tuotannossa, kun ajetaan valmiita ohjelmia. Manuaalitiloja on kaksi, toisessa tilassa manipulaattorin nopeus on rajoitettu pienemmäksi täydestä nopeudesta, jota käytetään robottia ohjelmoitaessa sekä oltaessa robotin työskentelyalueella. Täydennopeuden manuaalitilaa käytetään tehdyn ohjelman testaukseen, eli testiajoon. Kuva 6 Käyttöpaneeli

12 12 Kuvassa 7 on esitetty ohjelmointiyksikön näppäimet, joiden toiminnot ovat seuraavat: Kuva 7 Ohjelmointiyksikön näppäimet Ikkunanäppäimet: Näillä saadaan näytölle haluttu ikkuna. Käsinohjaus: Päästään käsinohjaukseen. Ohjelma: Käytetään robotin ohjelmoimiseen ja testiajoon. Tulot/lähdöt: Näyttää kaikki tulojen/lähtöjen tilat. Sekalaista: Näyttää listan, josta voidaan valita järjestelmäparametrit, huolto, tiedostonhallinta jne. Ohjelmoitavat näppäimet: Näppäinten funktiot voidaan itse ohjelmoida.
13 13 Ohjausnäppäimet: Liikutetaan kohdistinta. Lista: Voidaan siirtyä ikkunan eri osien välillä. Seuraava/edellinen sivu: Pääset seuraavalle/edelliselle sivulle. Ylös/Alas nuolet: Liikutetaan kursoria ylös tai alas. Oikealle/Vasemmalle nuolet: Liikutetaan kursoria oikealle tai vasemmalle. Liikenäppäimet: Valitaan miten robottia tai muuta oheislaitteistoa liikutetaan ohjaus-sauvaa käytettäessä. Liikeyksikkö: Valitaan ohjataanko manipulaattoria vai muuta robottiin liitettyä yksikköä. Liiketyyppi: Valitaan miten robotti liikkuu käsinohjauksella, uudelleenorientaatio tai lineaarinen liike. Liiketyyppi: Akselittainen liike. 1 = akselit 1-3, 2 = akselit 4-6. Inkrementti: Askellus päälle/pois. Muut näppäimet: Stop: Pysäyttää ohjelman suorituksen. Kontrasti: Voidaan säätää näytön kirkkautta. Valikkonäppäimet: Saadaan näkymään eri valikoita. Funktionäppäimet: Voidaan valita eri komentoja. Poista: Poistaa näytöllä valitun datan. Enter: Käytetään datan valitsemiseen ja syöttämiseen.
14 Tekniset tiedot Seuraavana on esitetty robotin tärkeimpiä teknisiä tietoja. Teknisistä tiedoista voidaan havaita, että mistään pienistä laitteista ei ole kyse. Ohjainkaapin tekniset tiedot: Paino 240 kg Korkeus 950 mm Leveys 800 mm Syvyys 540 mm Melu < 70 db Käyttölämpötila +5 C..+52 C Pääjännite V Päätaajuus 50/60 Hz Nimellisteho 4,5 kva 14,4 kva Akun kesto 1000 h Manipulaattorin tekniset tiedot: Paino 225 kg Käsittelykapasiteetti 5 kg Ulottuvuus 1,44 m Tarkkuus 0,05 mm Jalusta 667 x 450 mm
15 15 Kuvassa 8 on esitetty manipulaattorin tarkat mitat millimetreinä sivulta ja ylhäältä päin katsottuna. Kuvassa 9 on kuvattuna manipulaattorin tarkat ulottuvuudet ja työalueet. Manipulaattorin maksimi käsittelykapasiteetti on 5 kg, mutta jos työkalu on pidempi, niin silloin käsittelykapasiteetti tietysti laskee. Kuvasta 10 nähdään miten käsittelykapasiteetti muuttuu suhteessa manipulaattorin tarkastelupisteeseen (TKP) nähden. Kuva 8 Manipulaattorin mitat
16 16 Kuva 9 Manipulaattorin ulottuvuudet ja työalueet Kuva 10 Käsittely kapasiteetti
17 Turvallisuus ja standardit Robotti on suunniteltu ehdotonta turvallisuutta ajatellen. Robotin oma turvajärjestelmä perustuu kaksi-kanava piiriin jota seurataan jatkuvasti, jos jossakin komponentissa ilmenee virhe, moottoreiden sähkönsyöttö katkeaa ja jarrut kytkeytyvät päälle. Kuvasta 11 nähdään kaksi-kanava turvajärjestelmän piirin kytkentä/toiminta kaavio, eli jos jokin näistä kytkimistä on auki/aukeaa, moottorit pysähtyvät välittömästi. Robotti on suunniteltu ISO10218 (tammikuu 1992, Teollisuusrobottien turvallisuus) standardin vaatimusten mukaisesti, ja noudattaa myös liitteessä 1 olevia standardeja. Kuva 11 Kaksi-kanava turvajärjestelmä kaavio
.")
18 18 4 ABB IRB 1400 teollisuusrobotin käyttöönotto 4.1 Käynnistys Ennen robotin käynnistämistä varmistetaan että robotin suoja-alueella ei ole ketään. Kun suoja-alue on varmistettu, voidaan robottiin kytkeä käyttöjännite ohjauskaapissa olevassa pääkytkimestä (kuva 12). Jännitteen kytkemisen jälkeen näyttöön pitäisi ilmestyä kuvan 13 mukainen käynnistyskuva. Tämän jälkeen robotti tarkastaa automaattisesti oman ohjausjärjestelmän, ja mikäli tarkastuksessa ei löydy virheitä, näyttöön ilmestyy kuvan 14 mukainen alkukuva. Jos taas tarkistuksessa löytyy virheitä, siitä ilmoitetaan virhe-koodilla ja lyhyellä tekstillä, jotka tallentuvat myös tapahtumalokiin. Robotti käynnistyy samassa tilassa kuin sen on ollut sammuttaessa. Suoritusosoitin ei muutu, ja myös kaikki digitaaliset lähtösignaalit palautuvat virran katkaisua edeltäneisiin arvoihin. Toimintatilavalitsimen ollessa automaattitilassa, tuotantoikkuna ilmestyy alkunäytön jälkeen automaattisesti muutaman sekunnin kuluttua. Manuaalitilassa ollessa päästään haluttuun valikkoon painamalla ikkunanäppäintä. Kuva 12 Pääkytkin

19 19 Kuva 13 Käynnistysnäyttö Kuva 14 Alkunäyttö
20 Robotin Kalibrointi Kalibrointi on tehtävä jotta robotti toimii luotettavasti ja oikein, jos robottia tai sen ulkoisia akseleita ei ole kalibroitu kunnolla, se heikentää myös robotin ketteryyttä. Kalibrointiin kuuluu kaksi vaihetta, resolvereiden kalibrointi (hieno-kalibrointi) ja kierroslaskureiden päivitys. Hieno kalibroinnin voi tehdä vain ammattilainen erityistyökalujen avulla, mutta kierroslaskureiden päivityksen pystyy tekemään robotin käyttäjä. Kierroslaskureiden päivityksessä määrätään kalibroinnille oikeat moottorin kierrokset (kiertymät), jossa akselit asetetaan kalibrointiasemiin ja päivitetään kierroslaskurit. Kalibrointi aloitetaan ohjaamalla/asettelemalla manipulaattorin akselit kalibrointiasemiin. Akselit ovat oikeissa kalibrointiasemissa, kun akseleiden kalibrointimerkit ovat kohdallaan kuvan 15 mukaisesti. Tämän jälkeen painetaan Sekalaista ikkunanäppäintä, josta päästään kuvan 16 mukaiseen ikkunaan, josta valitaan huolto. Huolto-ikkunasta valitaan valikkonäppäimellä Näytä ja sieltä valitaan taas kalibrointi (kuva 17). Avautuneessa ikkunassa näkyy robottiin kytketyt yksiköt, ja sen kalibrointitila (kuva 18). Kalibrointitila voi olla jokin seuraavista: Tahdistunut = Kaikki akselit on kalibroitu ja niiden asennot tunnetaan. Yksikkö on valmis käyttöön. Päivittämätön kierroslaskuri = Kaikki akselit on hieno-kalibroitu, mutta yhdellä tai useammalla on kierroslaskuri päivittämättä. Ei kalibroitu = Yhtä tai useampaa akseleista ei ole hieno-kalibroitu. Tämä/nämä täytyy siten hieno-kalibroida. Tahdistamaton = Vähintään yhdellä akselilla on asento, jota ei tunneta.

21 Kuva 15 Manipulaattorin kalibrointimerkit 21

22 22 Kuva 16 Sekalaista-ikkuna Kuva 17 Huolto-ikkuna

23 23 Kuva 18 Yksiköiden kalibrointitilat Seuraavaksi valitaan valikkonäppäimellä Kalibr ja sieltä valitaan taas kierroslukulaskuripäivitys (kuva 19), josta aukeaa kuvan 20 mukainen kierroslukulaskuripäivitys-ikkuna. Ikkunasta nähdään kaikkien akseleiden tilat. Kierroslaskureiden päivitys tehdään valitsemalla kaikki akselit painamalla valikkonäppäintä kaikki ja sitten OK. Tämän jälkeen vielä hyväksytään päivityksen vahvistus, jonka jälkeen kierroslaskurit on päivitetty, ja niissä tulee lukea kuvan 20 mukaisesti KI-laskuri päivitetty. Yksikön tilana pitäisi nyt myös näkyä tahdistettu (kuva 18).

24 24 Kuva 19 Kierroslukulaskuripäivitys Kuva 20 Akseleiden kalibrointitilat

25 Käsinohjaus Manipulaattoria liikutetaan ohjaussauvalla, jossa on kolme vapausastetta, eli manipulaattoria voidaan liikuttaa kolmeen eri suuntaan samanaikaisesti. Liikkeen nopeus riippuu siitä miten paljon ohjaussauvan asento poikkeaa sen keskiasennosta, eli mitä suurempi poikkeama sitä nopeampi liike, mutta maksimissaan 250mm/s. Ohjaussauvaa voidaan käyttää riippumatta siitä, mikä ikkuna on auki, paitsi jos robotti on automaattitilassa, valmius-tilassa tai ohjelman suoritus on kesken. Käsinohjaukseen päästään painamalla käsinohjaus-ikkunanäppäintä (kuva 7), josta aukeaa kuvan 21 mukainen ikkuna, josta nähdään nykyiset liikeasetukset, nykyinen asema ja ohjaussauvan poikkeamista syntyvä liike. Kuva 21 Käsinohjaus-ikkuna

26 26 Nykyinen asema kertoo manipulaattorin akseleiden paikat/sijainnit. Lineaarisessa sekä uudelleenorientaation liiketyypeissä esitetään työkalun sijainti ja orientaation suhteessa työkohteen koordinaattijärjestelmään. Akseli kerrallaan liiketyypissä akseleiden asennot estetään asteina suhteessa vastaavan akselin kalibrointiasentoon. Ohjaussauvan poikkeamia osoittava kenttä näyttää miten ohjaussauvan pääsuunnat vaikuttavat akseleihin tai koordinaattisuuntiin (kuva 22). Kuva 22 Ohjaussauvan liikkeet lineaarisella liikkeellä peruskoordinaattijärjestelmässä
27 27 Liikeasetuksia voidaan muuttaa miten manipulaattori reagoi ohjaussauvan liikkeisiin. Liikeasetukset ovat seuraavat: Yksikkö = Kertoo ohjataanko manipulaattoria vai jotakin muuta ohjausyksikköön liitettyä yksikköä, teksti robotti tarkoittaa manipulaattoria. Yksikköä voidaan vaihtaa liikeyksikkö-näppäimellä. Liike = Manipulaattorin liikkeeksi voidaan valita lineaarinen, uudelleenorientaatio tai akseli kerrallaan liike. o Lineaarinen = Suoraviivainen liike o Uudelleenorientaatio = Työvälineen koordinaattijärjestelmän akselien suhteen o Akseli kerrallaan = Ohjaussauvan yksi liike ohjaa vain yhtä akselia. Akselit on jaettu kahteen ryhmään. (ryhmä 1: akselit 1-3, ryhmä 2: akselit 4-6). Kuvassa 23 nähdään akseli ryhmät ja ohjaussauvan liikkeet kullekin akselille. Koord = Valitaan minkä koordinaattijärjestelmän mukaan manipulaattorin liikkuu. o Maailma = Liikkuu maailmankoordinaatiston akselia pitkin (kuva 24) o Perus = Liikkuu peruskoordinaatiston akselia pitkin (kuva 22) o Työkalu = Liikkuu työkalun suunnassa (kuva 25) o WObj = Liikkuu työkohteen suunnassa (kuva 26) Työkalu = Valitaan käytettävä työkalu WObj = Valitaan työkohde, Wobj viittaa maailman koordinaattijärjestelmään Ohjaus.lukit = Ohjaussauvan akselisuuntien esto, eli voidaan estää ohjaussauvan poikkeamat tiettyihin suuntiin (kuva 27)
 liike o Pieni = Noin 0,05 mm tai 0,005 astetta per ohjaussauvan poikkeutus o Keskik.")
28 28 Inkrement. = Manipulaattorin liikkuu askeleittain (liikerata muodostuu pienistä peräkkäisistä liikkeistä). Liikkeen/askeleen suuruus voidaan valita (kuva 28). Inkrementtiliikettä käytetään kun halutaan liikuttaa manipulaattoria tarkasti. o Ei = Normaali (jatkuva) liike o Pieni = Noin 0,05 mm tai 0,005 astetta per ohjaussauvan poikkeutus o Keskik. = Noin 1 mm tai 0,02 astetta per ohjaussauvan poikkeutus o Suuri = Noin 5 mm tai 0,2 astetta per ohjaussauvan poikkeutus o Oma = Käyttäjän määrittelemä askel Kuva 23 Ohjaussauvan liikkeet akseli kerrallaan

29 29 Kuva 24 Maailman koordinaattijärjestelmä Kuva 25 Työkalun koordinaattijärjestelmä Kuva 26 Kohteen koordinaattijärjestelmä

30 30 Kuva 27 Ohjaussauvasta estetyt liikkeet Kuva 28 Inkrementtiliikkeen valinta
31 Ongelmat Ongelmia robotin käyttöönotossa ilmeni heti työn alkuvaiheessa. Kun robottiin kytkettiin ensimmäistä kertaa käyttöjännite, robotti ei käynnistynytkään niin kuin ohjekirjassa, vaan näyttöön ilmestyi kuvan 29 mukainen virhekoodi. Eli yhteys ohjelmointiyksikön ja ohjauskaapin/robotin välillä ei toiminut oikein. Aloitimme vian etsinnän tarkistamalla molemmat johdot ohjauskaapin ja manipulaattorin väliltä, sekä ohjelmointiyksikön johdon, että ne oli varmasti kytketty oikein ja että ne olivat ehjät. Kun kaapeleista ei löytynyt mitään vikaa, tuli mieleen tarkastaa yksinkertaisin asia, että ohjauskaapille tulee varmasti kaikki vaiheet, eli yksi syötön sulakkeista oli palanut, joka vaihdettiin sitten uuteen, jonka jälkeen kokeiltiin käynnistää robottia uudestaan. Ensimmäinen vika korjaantui, mutta sitten ilmeni uusi vika, eikä robottia saatu vieläkään käyntiin. Tällä kertaa virhekoodi oli kuvan 30 mukainen. Jostakin syystä robotin muisti oli tyhjentynyt, ja sen myötä kaikki sen ajurit oli hävinnyt. Ohjekirjaa tutkiessa löysin tälle myös syyn, eli robotin akut olivat tyhjentyneet, ja näin ollen robotin kaikki ajurit ja asetukset olivat nollautunut. Kuvan 31 mukaiset akut löytyy ohjauskaapin sisältä yläkannen alta. Tarvittavia ajureita ei robotin mukana ollut tallessa, joten ne jouduttiin tilaamaan ABB:ltä, samalla kun tilattiin 2 kpl uusia akkuja. Kun saimme tavarat ABB:ltä, asensimme ensin uudet akut paikoilleen, jonka jälkeen aloitin asentamaan ajureita. Ajureiden asennus sujui hyvin, koska robotti kertoi aina mitä pitää tehdä (kuva 32). Ajureiden asennusten jälkeen robotti saatiin käyntiin. Kuvassa 33 nähdään ensikäynnistyksen tapahtumaloki, jossa robotti ilmoitti kaikki ohjausjärjestelmässä havaitsemat virheet käynnistyksen yhteydessä. Virheet kuitattiin painamalla OK, jonka jälkeen pääsin käyttämään robottia.

32 32 Kuva 29 Virhenäyttö 1 Kuva 30 Virhenäyttö 2

33 33 Kuva 31 Akut Kuva 32 Ajureiden asennus

34 Kuva 33 Ensikäynnistyksen tapahtumaloki 34
, alirutiineista (aliohjelmia), ja ohjelmadatasta.")
35 35 5 ABB IRB 1400 teollisuusrobotin Ohjelmointi Ohjelma koostuu RAPID -kielellä ohjelmoiduista käskyistä ja datasta, jolla robottia ja oheislaitteita ohjataan. Ohjelma muodostuu yleensä kolmesta erilaisesta osasta, päärutiinista (pääohjelma), alirutiineista (aliohjelmia), ja ohjelmadatasta. Ohjelman suoritus alkaa siis päärutiinista, ja joka on ohjelman niin sanottu päärunko. Alirutiineja käytetään että ohjelma saadaan jaettua pienempiin osiin, jolloin ohjelmaa on helpompi lukea, sekä tietysti tehdä. Alirutiineja kutsutaan päärutiinista, tai muista alirutiineista. Kun kutsuttu rutiini on suoritettu loppuun, ohjelma palaa automaattisesti kutsuneen rutiinin seuraavaan käskyyn. Dataa käytetään sijaintien, numeeristen arvojen (esim. rekisterit ja laskurit), määrittämiseen. Hyvä esimerkki ohjelman rakenteesta on esitetty kuvassa 34. Kuva 34 Esimerkki ohjelman rakenteesta
. Tämän jälkeen ohjelmalle annetaan nimi, ja hyväksytään se painamalla funktionäppäintä OK.")
36 36 Kaikki ohjelmointi ja testaus tehdään ohjelma-ikkunaa käyttäen, johon päästään ohjelmointiyksiköstä painamalla ohjelma-näppäintä (kuva 7). Uuden ohjelman luominen aloitetaan painamalla valikkonäppäimellä Tied ja sieltä valitaan uusi (kuva 35). Tämän jälkeen ohjelmalle annetaan nimi, ja hyväksytään se painamalla funktionäppäintä OK. Näin syntyy ohjelma, joka sisältää vain yhden tyhjän päärutiinin main. Ennen ohjelmointi on hyvä miettiä jo etukäteen ohjelman rakenne, esim. monta ja minkä nimisiä alirutiineja kannattaa tehdä. Kun ohjelman rakenne on hahmoteltu, voidaan tämän jälkeen aloittaa itse ohjelmointi ja alirutiinien luominen. Kuva 35 Uuden ohjelman luominen
37 Rutiinit Uusi rutiini luodaan painamalla valikkonäppäintä Näytä, josta valitaan rutiinit. Tässä ikkunassa näkyy siis kaikki luodut rutiinit, mutta koska alirutiineja ei ole vielä luotu, niin ikkunassa ei näy kuin päärutiini main (kuva 36). Uusi alirutiini voidaan nyt luoda painamalla funktionäppäintä Uusi, jonka jälkeen rutiinille voidaan antaa haluttu nimi (kuva 37), joka hyväksytään taas painamalla funktionäppäintä OK. Järjestelmä määrittää aina uuden rutiinin automaattisesti proseduuriksi. Jokainen alirutiini voidaan luoda tällä tavalla, tai vaihtoehtoinen tapa on kopioida = kahdentaa rutiini. Kopioiminen tapahtuu seuraavalla tavalla. Siirretään kursori halutun alirutiinin kohdalle, ja painetaan funktionäppäintä Kahd. Järjestelmä ehdottaa automaattisesti nimeksi samaa kuin kopioitava rutiini, mutta kasvattaa juoksevaa numerointia yhdellä, eli jos kopioitavan rutiinin nimi olisi rutiini1, ehdottaisi järjestelmä nimeksi rutiini2, nimen voi halutessaan vaihtaa myös kokonaan. Kopioinnissa on syytä huomioida, että jos rutiiniin on tehty jo käskylista, niin rutiinia kopioidessa kopioituu myös rutiinin sisältö eli käskyt. Tämän on todella kätevä ominaisuus, jos esimerkiksi robotilla on tarkoitus siirtää kappaleita yhdestä samasta paikasta mutta viedä ne eri paikkoihin, esim. vierekkäin.

38 38 Kuva 36 Rutiinit-ikkuna Kuva 37 Uuden rutiinin luominen
39 Käskyt Kun kaikki tarvittavat rutiinit on luotu, voidaan aloittaa käskyjen luominen, niiden lisääminen rutiineihin. Käskyjen luominen aloitetaan valitsemalla haluttu rutiini, joka valitaan rutiinit -ikkunasta (kuva 36). Siirretään kursori halutun rutiinin kohdalle ja painetaan Enter -näppäintä, tai vaihtoehtoisesti painamalla funktionäppäintä Käsky, jonka jälkeen aukeaa kuvan 38 mukainen käsky-ikkuna. Nyt voidaan aloittaa käskyjen lisääminen valittuun rutiiniin. Painamalla lista - näppäintä, voidaan siirtyä ikkunassa käskyvalikon ja rutiinikäskylistan välillä. Kuva 38 Käsky-ikkuna
40 40 Käskyt on jaettu eri käskyvalikkoihin. Käskyvalikko voidaan vaihtaa painamalla valikkonäppäintä KVal1 tai KVal2, joista voidaan valita haluttu käskylista (kuvat 39 & 40). Käskylistat on esitetty liitteessä 2 ja käytettävät käskyt ja niiden selitykset on esitetty liitteessä 3. Kun haluttu käskylista on valittu, valitaan haluttu käsky siirtämällä kursori käskyn kohdalle ja painamalla Enter -näppäintä. Uusi käsky sijoittuu valitun käskyn perään, mutta jos valittu käsky on jo rutiinissa, voidaan valita lisätäänkö käsky ennen vai jälkeen valitun käskyn. Riippuen käskystä, jotkut käskyt siirtyvät heti rutiinikäskylistaan, mutta jotkut käskyt vaativat tarkemman määrityksen eli niillä on argumentteja, esim. Set -käskyyn joudutaan valitsemaan haluttu lähtö/rele jota käsky koskee. Myös liikekäskyt voidaan/pitää määrittää tarkemmin. Liikekäskyssä voidaan määrittää liikkeen: paikoitus, nopeus, tarkkuus sekä työkalu. Esimerkiksi komennossa MoveJ *, v1000, z30, tool1, jossa * = paikoitus, v1000 = nopeus, z30 = tarkkuus ja tool1 = työkalu. Kun valittuun rutiiniin on saatu luotua tarvittavat käskyt ja määritettyä ne, voidaan siirtyä takaisin rutiinit valikkoon ja valita seuraava ruutini johon käskyt luodaan. Kuva 39 KVal1
41 41 Kuva 40 KVal2 Kun kaikki alirutiinit on tehty valmiiksi, voidaan ne lisätä päärutiiniin, sillä nyt tiedetään tarkkaan mitä käskyjä kukin alirutiini sisältää, ja mitä käskyjä pitää luoda päärutiiniin alirutiinien lisäksi. Alirutiinit voidaan lisätä päärutiiniin ennen kuin niihin luodaan käskyt, mutta silloin ohjelman kokonaisuus on vaikeampia hahmottaa. Alirutiinit lisätään päärutiiniin samalla tavalla kuin alirutiineihin lisättiin käskyjä. Käsky jolla alirutiinia kutsutaan päärutiinista on ProcCall, kun käsky valitaan käskylistasta, valitaan vielä rutiini mitä kutsutaan. Kun päärutiini on saatu tehtyä valmiiksi, voidaan ohjelma testata.
42 Testaus Ohjelman testaukseen päästää päärutiini-ikkunan kautta, painamalla funktionäppäintä Testi, josta aukeaa kuvan 41 mukainen ikkuna. Ensiksi varmistetaan että robotin turva-alueella ei ole ketään, ja että hätä-seis -painikkeet ei ole kytketty päälle. Tämän jälkeen kuitataan kaikki järjestelmässä esiintyneet mahdolliset virheet, esim. hätä-seis pysäytys, painamalla käyttöpaneelin käyttö -painiketta. Ohjelman testiajossa voidaan muuttaa ohjelman/robotin nopeutta, sekä ajotavaksi voidaan valita joko, jatkuva, kierto (yksi kierros kerrallaan) tai askelittain (eteen- tai taaksepäin yhden askeleen verran). Tämän jälkeen asetetaan robotti käyttö-tilaan, painamalla sallintalaitetta ohjelmointiyksiköstä, ja painetaan funktionäppäintä käynn, jos suoritustavaksi on valittu jatkuva tai kierto. Askelittaisessa suoritustavassa painetaan funktionäppäintä Eteen tai Taakse. Jos ohjelman toimii niin kuin pitää, on ohjelma valmis myös automaattiajoon. Kuva 41 Testi-ikkuna
43 Automaattiajo Automaattiajoa käytetään tuotannon ajamiseen. Automaatti tilaan päästään kääntämällä toimintatilan valitsin asentoon automaatti (kuva 6), jonka jälkeen näyttöön ilmestyy kuvan 42 mukainen ikkuna, joka hyväksytään painamalla funktionäppäintä OK, josta päästään itse tuotanto-ikkunaan (kuva 43). Tämän jälkeen kuitataan taas kaikki järjestelmässä esiintyneet mahdolliset virheet painamalla käyttöpaneelin käyttö -painiketta. Tuotanto-ikkuna ei juuri eroa testi-ikkunasta, sillä tuotanto-tilassa voidaan muuttaa myös nopeutta ja ajotapaa. Merkittävin ero näillä on se että tuotanto-tilassa ohjelma pyörii ilman että tarvitsee painaa sallintalaitetta. Kun nopeus ja ajotapa on valittu, voidaan ohjelma käynnistää funktionäppäimestä Käynn, tai vaihtoehtoisesti Eteen tai Taakse funktionäppäimistä. Ohjelma voidaan pysäyttää ohjelmointiyksikön Stop -näppäimestä, ja tietysti robotti/ohjelma pysähtyy myös hätä-seis -painikkeista, mutta suositeltavaa on että niitä käytetään vain hätätilanteessa.

44 44 Kuva 42 Toimintatilan vaihto Kuva 43 Tuotanto-ikkuna
45 45 6 Ohjelma 3x4 maton tuotantoajoon 6.1 Käytännössä Robotin on tarkoitus valmistaa/kasata erikokoisia muovimattoja yksittäisistä 20cm x 20cm mattopaloista (kuva 44), mutta tässä käsitellään tarkemmin 3x4 maton valmistumista. Prosessiin kuuluu valukone, robotti ja puristin (kuva 45). Prosessi alkaa valukoneen muotista, jossa mattopala syntyy, jonka jälkeen mattopala kuljetetaan liukuhihnaa pitkin liukuhihnan päähän. Mattopala ohjataan liukuhihnan päässä kulmaukseen seinämien avulla, josta robotti pystyy siten hakemaan mattopalan aina samasta paikasta. Kun mattopala tulee kulmaukseen, lähtee signaali robotille, että mattopala on valmiina haettavaksi. Robotti hakee kpl:een ja vie sen puristimen pöydälle paikkaan 1 (kuva 45). Tämän jälkeen robotti menee parkkiin odottamaan uutta signaalia uudesta valmiista mattopalasta. Parkki paikoitus on määritetty liukuhihnan ja puristimen väliin. Kun taas uusi kpl on valmiina haettavaksi, robotti hakee sen, ja vie sen puristimen pöydälle paikalle 2. Tämä toistuu samalla tavalla 4:een kappaleeseen asti, eli neljällä mattopalalla saadaan täyteen maton ensimmäinen rivi. Kun ensimmäinen rivi on valmis, voidaan mattopalat puristaa kiinni toisiinsa. Neljännen mattopalan jälkeen robotti siirtyy puristimen pöydän päässä olevaan reikään, josta robotilla voidaan liikuttaa pöytää. Robotti siirtää pöytää yhden mattopalarivin verran eteenpäin. Tämän jälkeen robotti antaa käskyn puristimessa olevalle pöydän lukitussylinterille, joka lukitsee pöydän puristuksen ajaksi. Tämän jälkeen robotti antaa käskyn puristimelle, joka puristaa mattopalat kiinni toisiinsa. Kun puristus on tehty, vapautuu 2 sekunnin kuluttua myös pöydän lukitussylinteri, jonka jälkeen robotti siirtää pöydän takaisin alkupaikkaan. Tämän jälkeen robotti siirtyy taas parkkiin, odottamaan uutta mattopalaa. Tämä oli yks ohjelma kierros. Kun taas uusi mattopala on haettavissa, se viedään nyt paikalle 5, ja seuraava paikalle 6 jne. Kun rivi on valmis, robotti siirtää pöytää nyt 2 rivin verran, ja puristaa mattopalat kiinni toisiinsa.

46 46 Kun 3 riviä on valmiina ja ne puristettu, on 3x4 matto valmis. Tämän jälkeen robotti vetää kokonaisen maton pois puristimen pöydältä. Kuva 44 Mattopala Kuva 45 Puristin ja mattopalojen sijainnit
47 Ohjelman rakenne Ohjelma koostuu päärutiinista main, sekä 24 alirutiinista, jotka ovat: parkki, kplvalmis, haekpl, tartu, viekpl_1-12, irrota, siirto_1-3, lukitse, purista, vapauta ja poisto. Alirutiinia haekpl ei tarvitse olla kuin yksi, ja se käy jokaiseen mattopalan hakuun, koska mattopala käydään aina samasta paikasta. Alirutiinit viekpl pitää olla omansa, koska niillä on jokaisella oma paikoituksensa, mutta muuten niissä on samat käskyt kaikissa, ainoastaan ensimmäinen paikoitus on eri. Sama koskee myös siirto rutiineja, koska jokainen siirto on erilainen. Kuvassa 46 on havainnollistettu ohjelman rakenne, josta nähdään päärutiinin sisältö, sekä kaikkien alirutiinien ja niiden alirutiinien käskyt.
48 48 päärutiini "main" alirutiini "parkki" parkki; MoveJ *, v150, z30, tool0; haekpl; viekpl_1; alirutiini "haekpl" haekpl; kplvalmis; alirutiini "kplvalmis" viekpl_2; MoveJ *, v150, z30, tool0; WaitDI I1_12Varalla, 1; haekpl; MoveJ *, v5, fine, tool0; viekpl_3; WaitTime 1; haekpl; tartu; alirutiini "tartu" viekpl_4; WaitTime 1; Reset 01_12Varalla; siirto_1; MoveJ *, v5, fine, tool0; Set 01_11 TapSyl; haekpl; viekpl_5; alirutiini "viekpl_1-12" haekpl; MoveJ *, v150, z30, tool0; viekpl_6; MoveJ *, v5, fine, tool0; haekpl; WaitTime 1; viekpl_7; irrota; alirutiini "irrota" haekpl; WaitTime 1; Reset 01_11 TapSyl; viekpl_8; MoveJ *, v5, fine, tool0; Set 01_12Varalla; siirto_2; parkki; haekpl; viekpl_9; alirutiini "siirto_1-3" haekpl; MoveJ *, v150, fine, tool0; alirutiini "lukitse" viekpl_10; MoveJ *, v40, fine, tool0; Set 01_13Varalla; haekpl; MoveJ *, v40, fine, tool0; WaitTime 2; viekpl_11; WaitTime 1; haekpl; lukitse; alirutiini "purista" viekpl_12; purista; Set 01_14Varalla; siirto_3; WaitTime 2; WaitTime 3; poisto; vapauta; Reset 01_14Varalla; MoveJ *, v40, fine, tool0; MoveJ *, v40, fine, tool0; alirutiini "vapauta" parkki; Reset 01_13Varalla; WaitTime 2; alirutiini "poisto" MoveJ *, v150, z30, tool0; MoveJ *, v5, fine, tool0; WaitTime 1; tartu; WaitTime 1; MoveJ *, v5, fine, tool0; irrota; parkki; Kuva 46 Ohjelman rakenne
49 49 7 Pohdinta Opinnäytetyön aihe oli mielestäni todella kiinnostava, sillä aikaisempaa kokemusta teollisuusroboteista minulla ei ollut, tai mistään muistakaan roboteista. Työn alkuvaiheilla minua hieman jännittikin miten tämä työ tulee sujumaan, sillä toimeksiantajan puolesta kellään ei ollut kokemusta teollisuusroboteista, joten jouduin aloittamaan työn aivan tyhjästä. Toisaalta tämä oli hyvä asia, sillä tällä tavalla on perehdyttävä asiaan aivan perinpohjaisesti, ja sen myötä asiasta oppii paljon enemmän. Sen lisäksi että apua ei ollut saatavilla toimeksiantajan puolesta robotin käyttöön, oli huomioitavaa että kyseessä oli vanha ja käytetty robotti, joka oli viime vuodet ollut varastossa pölyttymässä, ja näin ollen oli odotettavissa ongelmia myös sen suhteen. Työn alkuvaiheessa robotissa ilmenneet ongelmat olivat kuitenkin onneksi melko pieniä, ja ne saatiin korjattua melko nopeasti ja vaivattomasti. Kun robotti saatiin takaisin henkiin ja pääsin vihdoin tutustumaan robottiin ja sen ominaisuuksiin käytännössä, pääsin robotin kanssa niin sanotusti sinuiksi melko nopeasti, ja monet ohjekirjasta jääneet epäselvyydet ratkesi. Käsinohjauksen ja sen ominaisuudet oppi melko nopeasti ja vaivattomasti, mutta ohjelmointi olikin hieman haasteellisempaa. Ohjelmoinnissa haastavinta alussa oli saada tehtyä järkeviä alirutiineja, ja että miten niitä voidaan kutsua toisiin rutiineihin, mutta käskylistaa tarkastellessa tarkemmin selvisi sekin ongelma. Työ oli oppimismielessä itselle todella antoisa, sillä ennen työtä minulla ei ollut mitään käsitystä roboteista, niiden toiminnoista, ominaisuuksista ja varsinkaan ohjelmoinnista, ja nyt minulla on melko hyvä käsitys roboteista yleensä ja RA- PID- ohjelmointikielestä. Mielestäni työstä oli myös suuri hyöty toimeksiantajalle, sillä robotti olisi edelleen käyttämättömänä varastossa pölyttymässä. Lopuksi täytyy vielä mainita ABB:n loistavasta asiakaspalvelusta, sillä heiltä sai moneen ongelmaan ratkaisun sähköpostilla muutaman tunnin sisään.
50 50 Lähteet 1. Oy All-Plast Ab. Yritys. [Luettu ] 2. ABB. Yritys. [Luettu ] 3. ABB. Yritys. [Luettu ] 4.
51 Robotin täyttämät standardit Liite (1) ANSI/RIA EN EN EN EN IEC ISO 10218, EN 775 ISO 9787 IEC 529 EN EN ANSI/UL CAN/CSA Z
52 Käskylistat Liite (2)
53 Käytettävät käskyt ja niiden selitykset Liite (3) 1(3)
54 Käytettävät käskyt ja niiden selitykset Liite (3) 2(3)
55 Käytettävät käskyt ja niiden selitykset Liite (3) 3(3)
OHJELMOINTILAITE 10/50
 OHJELMOINTILAITE 10/50 1 2 3 4 5 6 17 16 15 7 14 8 13 12 11 10 9 1) Näyttö 1 taivutuksen nro. 2) Näyttö 2 kulma 3) LED merkkivalo MANUAALI 4) OFF-SET. 5) Taivutussuunta. 6) Palautus 7) Käynnistys ja resetointi.
OHJELMOINTILAITE 10/50 1 2 3 4 5 6 17 16 15 7 14 8 13 12 11 10 9 1) Näyttö 1 taivutuksen nro. 2) Näyttö 2 kulma 3) LED merkkivalo MANUAALI 4) OFF-SET. 5) Taivutussuunta. 6) Palautus 7) Käynnistys ja resetointi.
PIKAKÄYTTÖOHJE V S&A Matintupa
 PIKAKÄYTTÖOHJE V1.0 2007 S&A Matintupa MITTALAITE; PAINIKKEET, PORTIT, OSAT PAIKALLINEN portti (local, L) PÄÄPORTTI (master, M) LCD NÄYTTÖ PÄÄTETUNNISTIN VIRTAKYTKIN FUNKTIONÄPPÄIN Jännitteen syöttö VAHVISTUS/
PIKAKÄYTTÖOHJE V1.0 2007 S&A Matintupa MITTALAITE; PAINIKKEET, PORTIT, OSAT PAIKALLINEN portti (local, L) PÄÄPORTTI (master, M) LCD NÄYTTÖ PÄÄTETUNNISTIN VIRTAKYTKIN FUNKTIONÄPPÄIN Jännitteen syöttö VAHVISTUS/
ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2015
 v. 2015") ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2015 Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Robotin tehtävänä on
ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2015 Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Robotin tehtävänä on
TSI VELOCICALC 9515 KÄYTTÖOHJE
 TSI VELOCICALC 9515 KÄYTTÖOHJE Velocicalc 9515 käyttöohje 2 SISÄLLYSLUETTELO 1 Mittarin perusvarusteet.. 3 2 Käyttöönotto. 3 Virransyöttö.. 3 Paristojen asennus... 3 Teleskooppianturin käyttö... 3 3 Mittarin
TSI VELOCICALC 9515 KÄYTTÖOHJE Velocicalc 9515 käyttöohje 2 SISÄLLYSLUETTELO 1 Mittarin perusvarusteet.. 3 2 Käyttöönotto. 3 Virransyöttö.. 3 Paristojen asennus... 3 Teleskooppianturin käyttö... 3 3 Mittarin
Maha Eurosystem jarrulaskentaohjelman asennusohje versio 7.20.026
 2012 Tecalemit Oy Seppo Koskivuori Maha Eurosystem jarrulaskentaohjelman asennusohje versio 7.20.026 Vaatimukset: - tietokone (PC), jossa vapaa USB portti - käyttöjärjestelmä Windows XP, Vista tai Windows
2012 Tecalemit Oy Seppo Koskivuori Maha Eurosystem jarrulaskentaohjelman asennusohje versio 7.20.026 Vaatimukset: - tietokone (PC), jossa vapaa USB portti - käyttöjärjestelmä Windows XP, Vista tai Windows
Febdok 6.0 paikallisversion asennus OHJEISTUS
 Febdok 6.0 paikallisversion asennus OHJEISTUS Sisällys 1 YLEISTÄ 1 2 ASENNUKSEN VALMISTELUT 2 2.1 VARMUUSKOPIOT 2 2.2 ASENNUSTIEDOSTON LATAUS, WWW.FEBDOK.FI 2 2.3 ASENNUSTIEDOSTON LATAUS, FEBDOK:IN SISÄINEN
Febdok 6.0 paikallisversion asennus OHJEISTUS Sisällys 1 YLEISTÄ 1 2 ASENNUKSEN VALMISTELUT 2 2.1 VARMUUSKOPIOT 2 2.2 ASENNUSTIEDOSTON LATAUS, WWW.FEBDOK.FI 2 2.3 ASENNUSTIEDOSTON LATAUS, FEBDOK:IN SISÄINEN
P6SLite ohjaus- ja zoom komennot
 1, Ohjaus zoom -toiminnot P6SLite ohjaus- ja zoom komennot Osa 1 pikanäppäintoiminnon Valitse APP-käyttöliittymää ja APP ilmestyy toimintopainikkeeseen. Paina + = ZOOM +, paina - = ZOOM-. 2, Manuaalinen
1, Ohjaus zoom -toiminnot P6SLite ohjaus- ja zoom komennot Osa 1 pikanäppäintoiminnon Valitse APP-käyttöliittymää ja APP ilmestyy toimintopainikkeeseen. Paina + = ZOOM +, paina - = ZOOM-. 2, Manuaalinen
ROBOTIIKAN LABORATORIOTYÖ 2 ( )
") ROBOTIIKAN LABORATORIOTYÖ 2 (2016 17) Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Robotin tehtävänä on tyhjentää lava. Laatikot
ROBOTIIKAN LABORATORIOTYÖ 2 (2016 17) Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Robotin tehtävänä on tyhjentää lava. Laatikot
NAVITA BUDJETTIJÄRJESTELMÄN ENSIASENNUS PALVELIMELLE
 NAVITA BUDJETTIJÄRJESTELMÄN ENSIASENNUS PALVELIMELLE Ennen palvelinohjelman asennusta perustetaan tarvittavat kansiot. Oikeustasoista share- tai security-tason oikeudet riittävät; molempien oikeustasojen
NAVITA BUDJETTIJÄRJESTELMÄN ENSIASENNUS PALVELIMELLE Ennen palvelinohjelman asennusta perustetaan tarvittavat kansiot. Oikeustasoista share- tai security-tason oikeudet riittävät; molempien oikeustasojen
Suomenkielinen versio. Johdanto. Laitteiston asennus. LC2002 Sweex Virtajohdon Ethernet-sovitin 200 Mbps
 LC2002 Sweex Virtajohdon Ethernet-sovitin 200 Mbps Johdanto Älä altista Sweex Virtajohdon Ethernet-sovitinta 200 Mbps äärilämpötiloille. Älä aseta tuotetta suoraan auringonvaloon tai sulje lämmityselementtejä.
LC2002 Sweex Virtajohdon Ethernet-sovitin 200 Mbps Johdanto Älä altista Sweex Virtajohdon Ethernet-sovitinta 200 Mbps äärilämpötiloille. Älä aseta tuotetta suoraan auringonvaloon tai sulje lämmityselementtejä.
Altus RTS. 1 Tekniset tiedot: 2 Lähetin: Telis 1 Telis 4 Centralis RTS
 Viitteet 000071 - Fi ASENNUS ohje Altus RTS Elektronisesti ohjattu putkimoottori, jossa RTSradiovastaanotin, aurinko- & tuuliautomatiikka SOMFY Altus RTS on putkimoottori, jonka rakenteeseen kuuluvat RTS-radiovastaanotin,
Viitteet 000071 - Fi ASENNUS ohje Altus RTS Elektronisesti ohjattu putkimoottori, jossa RTSradiovastaanotin, aurinko- & tuuliautomatiikka SOMFY Altus RTS on putkimoottori, jonka rakenteeseen kuuluvat RTS-radiovastaanotin,
ABT PUNNITSEVA HAARUKKAVAUNU ECONOMY
 ABT PUNNITSEVA HAARUKKAVAUNU ECONOMY Lue käyttöohje ennen vaunun käyttöönottoa! Sisällys 1. Johdanto 2. Erittely 3. Varoitukset ja turvaohjeet 4. Haarukkavaunun käyttäminen 4.1 Käyttö 4.2 Näytön toiminnot
ABT PUNNITSEVA HAARUKKAVAUNU ECONOMY Lue käyttöohje ennen vaunun käyttöönottoa! Sisällys 1. Johdanto 2. Erittely 3. Varoitukset ja turvaohjeet 4. Haarukkavaunun käyttäminen 4.1 Käyttö 4.2 Näytön toiminnot
lizengo Asennusopas Windows: in kopioiminen
 lizengo Asennusopas Windows: in kopioiminen Windows: in kopioiminen lizengo Asennusopas Klikkaa sitä Windows-versiota, jonka haluat kopioida USB-tikulle, niin pääset suoraan oikeaan oppaaseen. Windows
lizengo Asennusopas Windows: in kopioiminen Windows: in kopioiminen lizengo Asennusopas Klikkaa sitä Windows-versiota, jonka haluat kopioida USB-tikulle, niin pääset suoraan oikeaan oppaaseen. Windows
ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2014
 v. 2014") ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2014 Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Kuljettimelle 10 saapuva
ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2014 Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Kuljettimelle 10 saapuva
Käyttö-ja huolto-ohje Ajastin 1533 3-aikaa FIN
 Ajastin 1533 FIN 1 Kellonaika tai jäljellä oleva lämmitysaika 2 Tuuletuksen merkki 3 Ajan siirto eteen (kellonajan näyttö) 4 Ohjelmointi 5 Muistipaikan tunnus 6 Manuaalikäynnistys 7 Kellonajan asetuksen/kyselyn
Ajastin 1533 FIN 1 Kellonaika tai jäljellä oleva lämmitysaika 2 Tuuletuksen merkki 3 Ajan siirto eteen (kellonajan näyttö) 4 Ohjelmointi 5 Muistipaikan tunnus 6 Manuaalikäynnistys 7 Kellonajan asetuksen/kyselyn
Dynatel 2210E kaapelinhakulaite
 Dynatel 2210E kaapelinhakulaite Syyskuu 2001 KÄYTTÖOHJE Yleistä 3M Dynatel 2210E kaapelinhakulaite koostuu lähettimestä, vastaanottimesta ja tarvittavista johdoista. Laitteella voidaan paikantaa kaapeleita
Dynatel 2210E kaapelinhakulaite Syyskuu 2001 KÄYTTÖOHJE Yleistä 3M Dynatel 2210E kaapelinhakulaite koostuu lähettimestä, vastaanottimesta ja tarvittavista johdoista. Laitteella voidaan paikantaa kaapeleita
Lupa opetuskäyttöön pyydettävä. info@tietsikka.net. Näppäimistö. Kohdistimen ohjausnäppäimistö. Funktionäppäimistö. Kirjoitusnäppäimistö
 Näppäimistö 2005 Päivi Vartiainen 1 Kohdistimen ohjausnäppäimistö Funktionäppäimistö Kirjoitusnäppäimistö Numeronäppäimistö Kohdistimen ohjausnäppäimistöllä siirretään hiiren osoitinta ruudulla. Kohdistin
Näppäimistö 2005 Päivi Vartiainen 1 Kohdistimen ohjausnäppäimistö Funktionäppäimistö Kirjoitusnäppäimistö Numeronäppäimistö Kohdistimen ohjausnäppäimistöllä siirretään hiiren osoitinta ruudulla. Kohdistin
TSI DP-CALC 5815 KÄYTTÖOHJE
 TSI DP-CALC 5815 KÄYTTÖOHJE DP-CALC 5815 käyttöohje 2 SISÄLLYSLUETTELO 1 Mittarin perusvarusteet.. 3 2 Käyttöönotto. 3 Virransyöttö.. 3 Paristojen ja akkujen asennus... 3 3 Mittarin käyttö... 3 Näppäintoiminnot...
TSI DP-CALC 5815 KÄYTTÖOHJE DP-CALC 5815 käyttöohje 2 SISÄLLYSLUETTELO 1 Mittarin perusvarusteet.. 3 2 Käyttöönotto. 3 Virransyöttö.. 3 Paristojen ja akkujen asennus... 3 3 Mittarin käyttö... 3 Näppäintoiminnot...
CEM DT-3353 Pihtimittari
 CEM DT-3353 Pihtimittari Sivu 1/5 CEM DT-3353 Pihtimittari Ongelma Mittarin ohjelmisto ilmoittaa NO DATA vaikka tiedonsiirtokaapeli on kytketty tietokoneen ja mittarin välille, mittarissa on virta päällä
CEM DT-3353 Pihtimittari Sivu 1/5 CEM DT-3353 Pihtimittari Ongelma Mittarin ohjelmisto ilmoittaa NO DATA vaikka tiedonsiirtokaapeli on kytketty tietokoneen ja mittarin välille, mittarissa on virta päällä
Pamemetrilista ADAP-KOOL. EKC 201 ja EKC 301
 Pamemetrilista ADAP-KOOL EKC 201 ja EKC 301 RC.8A.D1.02 RC.8A.D2.02 08-1999 DANFOSS EKC201/301-SÄÄTIMiEN OHJELMOINTI Danfossin elektronista ohjauskeskusta (elektronista termostaattia) malli EKC:tä toimitetaan
Pamemetrilista ADAP-KOOL EKC 201 ja EKC 301 RC.8A.D1.02 RC.8A.D2.02 08-1999 DANFOSS EKC201/301-SÄÄTIMiEN OHJELMOINTI Danfossin elektronista ohjauskeskusta (elektronista termostaattia) malli EKC:tä toimitetaan
Finnish. Osien nimet. Tarkistuslaiteyksikkö. Sähkökaapelin tarkistuslaite. Vaihtokytkimen tarkistuslaite SM-EC79 HAKEMISTO
 SM-EC79 HAKEMISTO Tarkistuslaitteen käyttö Ongelman sijainnin määritys tarkistuslaitteella 136 Ongelma etuvaihtajassa tai takavaihtajassa 137 Ongelma SM-EW79A + ST-7970:n toiminnassa 139 SM-EW79A tarkistus
SM-EC79 HAKEMISTO Tarkistuslaitteen käyttö Ongelman sijainnin määritys tarkistuslaitteella 136 Ongelma etuvaihtajassa tai takavaihtajassa 137 Ongelma SM-EW79A + ST-7970:n toiminnassa 139 SM-EW79A tarkistus
Garmin GPSmap 60CSx -laite
 Garmin GPSmap 60CSx -laite GPS koulutus 20.6.2007 PAIKKATIETOPAJA -hanke Näppäimet ja laitteen osat Power - virta päälle/pois, taustavalon säätö Keinunäppäin valitse vaihtoehtoja / kenttiä, syötä tietoja,
Garmin GPSmap 60CSx -laite GPS koulutus 20.6.2007 PAIKKATIETOPAJA -hanke Näppäimet ja laitteen osat Power - virta päälle/pois, taustavalon säätö Keinunäppäin valitse vaihtoehtoja / kenttiä, syötä tietoja,
NORDEAN WEB SERVICES YHTEYDEN KÄYTTÖÖNOTTO
 1 (11) NORDEAN WEB SERVICES YHTEYDEN KÄYTTÖÖNOTTO Sisältö 1 Web Services yhteyskanavan käyttöönotto... 1 2 Web Services varmenteiden tallennus... 2 2.1 Käyttäjätunnuksen tallennus Maksuliikenne-ohjelmistoon...
1 (11) NORDEAN WEB SERVICES YHTEYDEN KÄYTTÖÖNOTTO Sisältö 1 Web Services yhteyskanavan käyttöönotto... 1 2 Web Services varmenteiden tallennus... 2 2.1 Käyttäjätunnuksen tallennus Maksuliikenne-ohjelmistoon...
DNA MOBIILI TV - YLEISET KÄYTTÖOHJEET
 DNA MOBIILI TV - YLEISET KÄYTTÖOHJEET Mobiili-tv-palvelua käytetään puhelimen mobiili-tv-sovelluksella. Tässä dokumentissa kuvatut toiminnallisuudet ovat esimerkkejä tiettyjen puhelinmallien toiminnallisuuksista.
DNA MOBIILI TV - YLEISET KÄYTTÖOHJEET Mobiili-tv-palvelua käytetään puhelimen mobiili-tv-sovelluksella. Tässä dokumentissa kuvatut toiminnallisuudet ovat esimerkkejä tiettyjen puhelinmallien toiminnallisuuksista.
Kopioi cd-levyt kiintolevylle, niin fyysiset levyt joutavat eläkkeelle.
 TEE KONEESTA CD-VARASTO: Kopioi cd-levyt kiintolevylle, niin fyysiset levyt joutavat eläkkeelle. Siirrä cd-levysi TIETOJA Kopioi cd-levyt kiintolevylle levykuviksi, niin pääset sisältöön nopeasti käsiksi
TEE KONEESTA CD-VARASTO: Kopioi cd-levyt kiintolevylle, niin fyysiset levyt joutavat eläkkeelle. Siirrä cd-levysi TIETOJA Kopioi cd-levyt kiintolevylle levykuviksi, niin pääset sisältöön nopeasti käsiksi
TEKNIIKAN YKSIKKÖ AUTOMAATIOTEKNIIKAN KOULUTUSOHJELMA AUT4SN TL7341, TL7321 OHJAUSLOGIIKAT 2 JA AUTOMAATIOJÄRJESTELMÄT 2 PROJEKTITYÖ
 TEKNIIKAN YKSIKKÖ AUTOMAATIOTEKNIIKAN KOULUTUSOHJELMA AUT4SN TL7341, TL7321 OHJAUSLOGIIKAT 2 JA AUTOMAATIOJÄRJESTELMÄT 2 PROJEKTITYÖ TERÄSRULLAN SIIRTO VARASTORAMPILTA PANIE- RINPOISTOON JA ASKELPALKILLE
TEKNIIKAN YKSIKKÖ AUTOMAATIOTEKNIIKAN KOULUTUSOHJELMA AUT4SN TL7341, TL7321 OHJAUSLOGIIKAT 2 JA AUTOMAATIOJÄRJESTELMÄT 2 PROJEKTITYÖ TERÄSRULLAN SIIRTO VARASTORAMPILTA PANIE- RINPOISTOON JA ASKELPALKILLE
Liite 2 1(20) Tarkastukset Tekla NIS Offline Inspection ohjelmistolla. Käyttöohje asentajille
 Tarkastukset Tekla NIS Offline Inspection ohjelmistolla. Käyttöohje asentajille") Liite 2 1(20) Tarkastukset Tekla NIS Offline Inspection ohjelmistolla Käyttöohje asentajille Kemin Energia/ Arto Tikkanen 22.2.2013 Liite 2 2(20) Sisältö 1. Tarkastusohjelmisto... 3 2. Puuttuvan tarkastuskohteen
Liite 2 1(20) Tarkastukset Tekla NIS Offline Inspection ohjelmistolla Käyttöohje asentajille Kemin Energia/ Arto Tikkanen 22.2.2013 Liite 2 2(20) Sisältö 1. Tarkastusohjelmisto... 3 2. Puuttuvan tarkastuskohteen
Visma Fivaldi -käsikirja Tehtävienhallinta- ohje käyttäjälle
 Visma Fivaldi -käsikirja Tehtävienhallinta- ohje käyttäjälle 2 Sisällys 1 Palvelunhallinta... 3 1.1 Käyttäjäryhmän luominen... 3 2 Tehtävienhallinta- perustiedot... 4 2.1 Yhtiön perustiedot... 4 2.2 Tehtävä-/
Visma Fivaldi -käsikirja Tehtävienhallinta- ohje käyttäjälle 2 Sisällys 1 Palvelunhallinta... 3 1.1 Käyttäjäryhmän luominen... 3 2 Tehtävienhallinta- perustiedot... 4 2.1 Yhtiön perustiedot... 4 2.2 Tehtävä-/
Macintosh (Mac OS X 10.2) Verkkoasetukset Elisa Laajakaista yhteyksille:
 Verkkoasetukset Elisa Laajakaista yhteyksille:") 1 (13) Macintosh () Verkkoasetukset Elisa Laajakaista yhteyksille: Valitse Omenavalikosta Järjestelmäasetukset. Järjestelmäasetuksista Verkko 2 (13) Verkkoasetuksista (1.) Kytkentä Ethernet ja (2.) Määrittelytapa
1 (13) Macintosh () Verkkoasetukset Elisa Laajakaista yhteyksille: Valitse Omenavalikosta Järjestelmäasetukset. Järjestelmäasetuksista Verkko 2 (13) Verkkoasetuksista (1.) Kytkentä Ethernet ja (2.) Määrittelytapa
T&M Autori Versio Series 60 -puhelimiin
 T&M Autori Versio 5.0.0 Series 60 -puhelimiin Asennusohje 19. huhtikuuta 2010 TIETOMEKKA T&M Autori asennusohje - 2 SISÄLLYSLUETTELO SISÄLLYSLUETTELO 2 1. YLEISTÄ 3 2. UUDEN MUISTIKORTIN ASENNUS 3 3. T&M
T&M Autori Versio 5.0.0 Series 60 -puhelimiin Asennusohje 19. huhtikuuta 2010 TIETOMEKKA T&M Autori asennusohje - 2 SISÄLLYSLUETTELO SISÄLLYSLUETTELO 2 1. YLEISTÄ 3 2. UUDEN MUISTIKORTIN ASENNUS 3 3. T&M
KIITOS RICA OPTIMOINTIOHJELMAN VALITSEMISESTA
 KIITOS RICA OPTIMOINTIOHJELMAN VALITSEMISESTA Asennusohjeiden sisältö 1. RICA optimointiohjelmoinnin periaate isoftloaderilla... 2 2. RICA isoftloader toimituspaketin sisältö... 3 3. isoftloader Sync-ohjelmiston
KIITOS RICA OPTIMOINTIOHJELMAN VALITSEMISESTA Asennusohjeiden sisältö 1. RICA optimointiohjelmoinnin periaate isoftloaderilla... 2 2. RICA isoftloader toimituspaketin sisältö... 3 3. isoftloader Sync-ohjelmiston
Tiedonsiirto helposti navetta-automaation ja tuotosseurannan välillä
 Tiedonsiirto helposti navetta-automaation ja tuotosseurannan välillä Tiedonsiirto VMS-, Alpro- tai DelProtuotannonohjausjärjestelmästä Ammuohjelmistoon 5/2014 Asennettavat ohjelmat ja versiot VMS-Management
Tiedonsiirto helposti navetta-automaation ja tuotosseurannan välillä Tiedonsiirto VMS-, Alpro- tai DelProtuotannonohjausjärjestelmästä Ammuohjelmistoon 5/2014 Asennettavat ohjelmat ja versiot VMS-Management
TUTA Q2 Tallentava valvontakamera Asennusohje
 TUTA Q2 Tallentava valvontakamera Asennusohje 1.02 Version 1.8.2011 Uusin versio tästä käsirkirjasta löytyy internet-osoitteesta: http://www.microdata.fi/pdf/tuta/tuta-q2_kasikirja.pdf Copyright 2011 Microdata
TUTA Q2 Tallentava valvontakamera Asennusohje 1.02 Version 1.8.2011 Uusin versio tästä käsirkirjasta löytyy internet-osoitteesta: http://www.microdata.fi/pdf/tuta/tuta-q2_kasikirja.pdf Copyright 2011 Microdata
HP ProBook 430 G5 kannettavien käyttöönotto
 HP ProBook 430 G5 kannettavien käyttöönotto Windows 10:n asennus, päivitysten tarkistus ja Abitti-asetukset Kytke tietokone verkkovirtaan ennen koneen käynnistämistä! Windows 10 Home käyttöjärjestelmän
HP ProBook 430 G5 kannettavien käyttöönotto Windows 10:n asennus, päivitysten tarkistus ja Abitti-asetukset Kytke tietokone verkkovirtaan ennen koneen käynnistämistä! Windows 10 Home käyttöjärjestelmän
SATAKUNNAN AMMATTIKORKEAKOULU Sähkötekniikan koulutusohjelma. M-koodit Omron servojen ohjauksessa. Luovutettu. Hyväksytty
 SATAKUNNAN AMMATTIKORKEAKOULU Sähkötekniikan koulutusohjelma M-koodit Omron servojen ohjauksessa Tekijän nimi Ryhmätunnus Syventävä työ Jouni Lamminen EE01POS 4. vuosikurssin syventävä Luovutettu Hyväksytty
SATAKUNNAN AMMATTIKORKEAKOULU Sähkötekniikan koulutusohjelma M-koodit Omron servojen ohjauksessa Tekijän nimi Ryhmätunnus Syventävä työ Jouni Lamminen EE01POS 4. vuosikurssin syventävä Luovutettu Hyväksytty
ONE 118 OHJELMOITAVA PÄÄVAHVISTIN
 10 ohjelmoitavaa UHF- kanavanippua 3 erillistä UHF tuloa; UHF1 UHF2 UHF3 Laajakaistatulo VHF I +ULA Laajakaistatulo VHF III + DAB UHF filtteri 1 5 kanavan levyinen; 8-40 MHz Automaattinen skannaus UHF-
10 ohjelmoitavaa UHF- kanavanippua 3 erillistä UHF tuloa; UHF1 UHF2 UHF3 Laajakaistatulo VHF I +ULA Laajakaistatulo VHF III + DAB UHF filtteri 1 5 kanavan levyinen; 8-40 MHz Automaattinen skannaus UHF-
Käyttöohjeet. Sovellussivusto
 Käyttöohjeet Sovellussivusto SISÄLLYSLUETTELO Tietoja oppaasta...2 Oppaassa käytetyt symbolit...2 Vastuuvapauslauseke...3 Huomautuksia...3 Mitä sovellussivustolla voi tehdä... 4 Ennen sovellussivuston
Käyttöohjeet Sovellussivusto SISÄLLYSLUETTELO Tietoja oppaasta...2 Oppaassa käytetyt symbolit...2 Vastuuvapauslauseke...3 Huomautuksia...3 Mitä sovellussivustolla voi tehdä... 4 Ennen sovellussivuston
Matopeli C#:lla. Aram Abdulla Hassan. Ammattiopisto Tavastia. Opinnäytetyö
 Matopeli C#:lla Aram Abdulla Hassan Ammattiopisto Tavastia Opinnäytetyö Syksy 2014 1 Sisällysluettelo 1. Johdanto... 3 2. Projektin aihe: Matopeli C#:lla... 3 3. Projektissa käytetyt menetelmät ja työkalut
Matopeli C#:lla Aram Abdulla Hassan Ammattiopisto Tavastia Opinnäytetyö Syksy 2014 1 Sisällysluettelo 1. Johdanto... 3 2. Projektin aihe: Matopeli C#:lla... 3 3. Projektissa käytetyt menetelmät ja työkalut
Fortum Fiksu Etäohjattava roiskeveden kestävä sähkökytkin (IP44) Käyttöohjeet
 Käyttöohjeet") Fortum Fiksu Etäohjattava roiskeveden kestävä sähkökytkin (IP) Käyttöohjeet Sisällys 1 Fortum Fiksu -järjestelmään liitettävä sähkökytkin 2 Asentaminen 2.1 Kytkimen liittäminen Fortum Fiksu -järjestelmään
Fortum Fiksu Etäohjattava roiskeveden kestävä sähkökytkin (IP) Käyttöohjeet Sisällys 1 Fortum Fiksu -järjestelmään liitettävä sähkökytkin 2 Asentaminen 2.1 Kytkimen liittäminen Fortum Fiksu -järjestelmään
Konsolin näytössä näkyy käytettäessä ohjaavia viestejä, joita kannattaa tämän ohjeen lisäksi seurata.
 1 Tulostaulun käyttöohje 1. Yleistä Konsolin näytössä näkyy käytettäessä ohjaavia viestejä, joita kannattaa tämän ohjeen lisäksi seurata. Näytön alapuolella olevilla A, B, C jne. painikkeilla voi valita
1 Tulostaulun käyttöohje 1. Yleistä Konsolin näytössä näkyy käytettäessä ohjaavia viestejä, joita kannattaa tämän ohjeen lisäksi seurata. Näytön alapuolella olevilla A, B, C jne. painikkeilla voi valita
ASENNUSOHJE TVM110 MetaTrak
 5040XXXXXX ASENNUSOHJE TVM110 MetaTrak SARJA SISÄLTÄÄ FI TVM110 KESKUSYKSIKKÖ JOHTOSARJA IRROTA AJONEUVON AKKU GPS ANTENNI GSM ANTENNI KIIHTYVYYSANTURI TARVIKEPUSSI TEKNISET TIEDOT Mitat...104 x 75 x 27
5040XXXXXX ASENNUSOHJE TVM110 MetaTrak SARJA SISÄLTÄÄ FI TVM110 KESKUSYKSIKKÖ JOHTOSARJA IRROTA AJONEUVON AKKU GPS ANTENNI GSM ANTENNI KIIHTYVYYSANTURI TARVIKEPUSSI TEKNISET TIEDOT Mitat...104 x 75 x 27
CipherLab CPT-8001L -tiedonkeruupäätteen käyttö Ecomin kanssa
 CipherLab CPT-8001L -tiedonkeruupäätteen käyttö Ecomin kanssa Sisällys Laitteen käyttöönotto...3 Latauskehdon asennus...3 Tiedonsiirto-ohjelman asennus...4 Keräilylaitteen käyttö...5 Viivakoodien luku...5
CipherLab CPT-8001L -tiedonkeruupäätteen käyttö Ecomin kanssa Sisällys Laitteen käyttöönotto...3 Latauskehdon asennus...3 Tiedonsiirto-ohjelman asennus...4 Keräilylaitteen käyttö...5 Viivakoodien luku...5
1. Puhelimen käynnistys. Käynnistä puhelin sen käynnistyspainikkeesta. Ensin kysytään SIMkortin PIN-koodia. Uudessa JYU SIM-kortissa se on 0000.
 Android Puhelimen käyttöönotto. Lyhyesti: Ennen puhelimen käynnistämistä ensimmäistä kertaa, avaa sim-kortin kelkka puhelimen mukana toimitetulla työkalulla ja asenna SIM-kortti puhelimeen. Puhelimen mukanana
Android Puhelimen käyttöönotto. Lyhyesti: Ennen puhelimen käynnistämistä ensimmäistä kertaa, avaa sim-kortin kelkka puhelimen mukana toimitetulla työkalulla ja asenna SIM-kortti puhelimeen. Puhelimen mukanana
Asennuksessa kannattaa käyttää asennusohjelman tarjoamia oletusarvoja.
 1 1 Tivax Laskutus 4.5 1.1 Tivax ohjelman asentaminen TivaxLaskutus version 4.5 asentamiseksi on oltava asennus CD. Asennusohjelma käynnistetään tuplaklikkamalla asennus CD:llä olevaa Tivax45LaskuSetup.exe
1 1 Tivax Laskutus 4.5 1.1 Tivax ohjelman asentaminen TivaxLaskutus version 4.5 asentamiseksi on oltava asennus CD. Asennusohjelma käynnistetään tuplaklikkamalla asennus CD:llä olevaa Tivax45LaskuSetup.exe
Provet Win 2 Movet -yhteys:
 Movet Provet Win 2 -yhteys Movet-yhteyden toimiminen vaatii Provet Win 2-ohjelman version 2.154 (julkaistu kesäkuu 2016) sekä toimivat Movet-tunnukset. Provet Win 2 Movet -yhteys: 1. Käynnistä Rekisterit
Movet Provet Win 2 -yhteys Movet-yhteyden toimiminen vaatii Provet Win 2-ohjelman version 2.154 (julkaistu kesäkuu 2016) sekä toimivat Movet-tunnukset. Provet Win 2 Movet -yhteys: 1. Käynnistä Rekisterit
Uuden työ- tai mittavälineen luominen tietokantaan
 Sivu:1(12) Työ- ja mittaväline-tietokanta löytyy serveriltä APPL14.DE.ABB.COM/SRV/ABB Tarvitset read-oikeudet tietokannan tarkasteluun ja editor mainusers-oikeudet tietokannan muokkaukseen. Jos tarkoituksenasi
Sivu:1(12) Työ- ja mittaväline-tietokanta löytyy serveriltä APPL14.DE.ABB.COM/SRV/ABB Tarvitset read-oikeudet tietokannan tarkasteluun ja editor mainusers-oikeudet tietokannan muokkaukseen. Jos tarkoituksenasi
KSENIA GEMINO 4 GSM/GPRS-modeemi. Pikaohjelmointiohje
 KSENIA GEMINO 4 GSM/GPRS-modeemi Pikaohjelmointiohje Basis-ohjelman asennus Hae basis-ohjelma www.kseniasecurity.com osoitteesta (SOLUTIONS - SOFTWARE) ja avaa asennustiedosto. Hyväksy painamalla I agree.
KSENIA GEMINO 4 GSM/GPRS-modeemi Pikaohjelmointiohje Basis-ohjelman asennus Hae basis-ohjelma www.kseniasecurity.com osoitteesta (SOLUTIONS - SOFTWARE) ja avaa asennustiedosto. Hyväksy painamalla I agree.
NAVITA BUDJETTIJÄRJESTELMÄN ENSIASENNUS TYÖASEMALLE
 NAVITA BUDJETTIJÄRJESTELMÄN ENSIASENNUS TYÖASEMALLE 1) Navita Budjettijärjestelmä asennetaan palvelimelle asennetusta Navita\NavitaSetup kansiosta Setup komennolla tämä mahdollistaa Navita-työasemien automaattisen
NAVITA BUDJETTIJÄRJESTELMÄN ENSIASENNUS TYÖASEMALLE 1) Navita Budjettijärjestelmä asennetaan palvelimelle asennetusta Navita\NavitaSetup kansiosta Setup komennolla tämä mahdollistaa Navita-työasemien automaattisen
Skype for Business ohjelman asennus- ja käyttöohje Sisällys
 Skype for Business ohjelman asennus- ja käyttöohje Sisällys Kirjautuminen Office 365 -palveluun... 2 Skype for Business ohjelman asentaminen... 3 Yhteyshenkilöiden lisääminen Skype for Business ohjelmassa...
Skype for Business ohjelman asennus- ja käyttöohje Sisällys Kirjautuminen Office 365 -palveluun... 2 Skype for Business ohjelman asentaminen... 3 Yhteyshenkilöiden lisääminen Skype for Business ohjelmassa...
Ohjelmoitava magneettivastuksellinen kuntopyörä. LCD-Näyttö BC-81295
 Ohjelmoitava magneettivastuksellinen kuntopyörä LCD-Näyttö BC-81295 Yhteenveto Tämä on tarkoitettu ainoastaan ohjelmoitavaan magneettivastukselliseen kuntopyörään. Järjestelmään kuuluu kolme (3) osaa:
Ohjelmoitava magneettivastuksellinen kuntopyörä LCD-Näyttö BC-81295 Yhteenveto Tämä on tarkoitettu ainoastaan ohjelmoitavaan magneettivastukselliseen kuntopyörään. Järjestelmään kuuluu kolme (3) osaa:
HF1 laitteen käyttöönotto ja asetukset
 HF1 laitteen käyttöönotto ja asetukset Laitteen kytkentä 1. Kytke laitteeseen käyttöjännite 12V. Sulakkeelle menevään punaiseen johtoon kytketään +12V. Normaalissa odotustilassa laitteen virrankulutus
HF1 laitteen käyttöönotto ja asetukset Laitteen kytkentä 1. Kytke laitteeseen käyttöjännite 12V. Sulakkeelle menevään punaiseen johtoon kytketään +12V. Normaalissa odotustilassa laitteen virrankulutus
KÄYTTÖOHJE HIRVIMATIC (2V0) 5.5.2010
 5.5.2010") 1 KÄYTTÖOHJE HIRVIMATIC (2V0) 5.5.2010 NÄPPÄIMISTÖ: Ohjelman valinta Asetukset /nollaus Ajastimen valinta (Ei vielä käytössä) Ohjaus oikealle / lisää asetusta / ajastimen käynnistys Seis / valinnan vahvistus
1 KÄYTTÖOHJE HIRVIMATIC (2V0) 5.5.2010 NÄPPÄIMISTÖ: Ohjelman valinta Asetukset /nollaus Ajastimen valinta (Ei vielä käytössä) Ohjaus oikealle / lisää asetusta / ajastimen käynnistys Seis / valinnan vahvistus
Rider 20 Rider 20:ssä on kolme näppäintä, joita käytetään useisiin eri tarkoituksiin.
 Pikaopas Rider Rider :ssä on kolme näppäintä, joita käytetään useisiin eri tarkoituksiin. 1 Näppäintoiminnot YLÖS (1) ALAS (3) Paina pitkään kytkeäksesi taustavalon Paina mittaritilassa lyhyesti vierittääksesi
Pikaopas Rider Rider :ssä on kolme näppäintä, joita käytetään useisiin eri tarkoituksiin. 1 Näppäintoiminnot YLÖS (1) ALAS (3) Paina pitkään kytkeäksesi taustavalon Paina mittaritilassa lyhyesti vierittääksesi
Sivu 1 / 11 08.01.2013 Viikin kirjasto / Roni Rauramo
 Sivu 1 / 11 Kuvien siirto kamerasta Lyhyesti Tämän oppaan avulla voit: - käyttää tietokoneen omaa automaattista kopiointiin tai siirtoon tarkoitettua toimintaa kuvien siirtoon kamerasta tai muistikortista
Sivu 1 / 11 Kuvien siirto kamerasta Lyhyesti Tämän oppaan avulla voit: - käyttää tietokoneen omaa automaattista kopiointiin tai siirtoon tarkoitettua toimintaa kuvien siirtoon kamerasta tai muistikortista
SATAKUNNAN AMMATTIKORKEAKOULU. Hakala Toni Varpelaide Heidi TEKSTINKÄSITTELYN OHJEET CASE: OPINNÄYTETYÖN RAPORTOINTI WORDILLA
 SATAKUNNAN AMMATTIKORKEAKOULU Hakala Toni Varpelaide Heidi TEKSTINKÄSITTELYN OHJEET CASE: OPINNÄYTETYÖN RAPORTOINTI WORDILLA Liiketalous ja tietojenkäsittely Huittinen Liiketalous Taloushallinto 2005 1
SATAKUNNAN AMMATTIKORKEAKOULU Hakala Toni Varpelaide Heidi TEKSTINKÄSITTELYN OHJEET CASE: OPINNÄYTETYÖN RAPORTOINTI WORDILLA Liiketalous ja tietojenkäsittely Huittinen Liiketalous Taloushallinto 2005 1
Sähköpostitilin käyttöönotto
 Sähköpostitilin käyttöönotto Versio 1.0 Jarno Parkkinen jarno@atflow.fi Sivu 1 / 16 1 Johdanto... 2 2 Thunderbird ohjelman lataus ja asennus... 3 3 Sähköpostitilin lisääminen ja käyttöönotto... 4 3.2 Tietojen
Sähköpostitilin käyttöönotto Versio 1.0 Jarno Parkkinen jarno@atflow.fi Sivu 1 / 16 1 Johdanto... 2 2 Thunderbird ohjelman lataus ja asennus... 3 3 Sähköpostitilin lisääminen ja käyttöönotto... 4 3.2 Tietojen
Lego Mindstorms NXT. OPH oppimisympäristöjen kehittämishanke 2011-2013. (C) 2012 Oppimiskeskus Innokas! All Rights Reserved 1
 2012 Oppimiskeskus Innokas! All Rights Reserved 1") Lego Mindstorms NXT OPH oppimisympäristöjen kehittämishanke 2011-2013 (C) 2012 Oppimiskeskus Innokas! All Rights Reserved 1 Anturi- ja moottoriportit A B C 1 2 3 4 (C) 2012 Oppimiskeskus Innokas! All Rights
Lego Mindstorms NXT OPH oppimisympäristöjen kehittämishanke 2011-2013 (C) 2012 Oppimiskeskus Innokas! All Rights Reserved 1 Anturi- ja moottoriportit A B C 1 2 3 4 (C) 2012 Oppimiskeskus Innokas! All Rights
Java Runtime -ohjelmiston asentaminen
 Java Runtime -ohjelmiston asentaminen Windows Vista, Internet Explorer 7 - Suomenkielinen Huomaa! Asennuksen vaiheet voivat poiketa tästä ohjeistuksesta, johtuen esim. käyttämässäsi tietokoneessa olevasta
Java Runtime -ohjelmiston asentaminen Windows Vista, Internet Explorer 7 - Suomenkielinen Huomaa! Asennuksen vaiheet voivat poiketa tästä ohjeistuksesta, johtuen esim. käyttämässäsi tietokoneessa olevasta
kokoaminen 1. Ota ASPER ajanottolaitteisto 1- kentän laatikosta ja siirrä kisakentälle 2. Kokoa yleisönäyttö sopivaa paikkaan ja vedä sille sähkö
 pikaopas ASPER ajanoton kokoaminen 1. Ota ASPER ajanottolaitteisto 1- kentän laatikosta ja siirrä kisakentälle 2. Kokoa yleisönäyttö sopivaa paikkaan ja vedä sille sähkö Sähköjenkytkentästä oma kohta.
pikaopas ASPER ajanoton kokoaminen 1. Ota ASPER ajanottolaitteisto 1- kentän laatikosta ja siirrä kisakentälle 2. Kokoa yleisönäyttö sopivaa paikkaan ja vedä sille sähkö Sähköjenkytkentästä oma kohta.
m2 ja Micromon erot Sami Tikkanen 0400 779591 sami.tikkanen@combicool.fi Micromon Ei laajennettavissa Laajennettavissa 99 pisteeseen m2 + yksiköllä
 Micromon käyttöohje Sami Tikkanen 0400 779591 sami.tikkanen@combicool.fi Oy Combi Cool Ab 1 m2 ja Micromon erot m2 Laajennettavissa 99 pisteeseen m2 + yksiköllä Ohjelmointi valikoista Micromon Ei laajennettavissa
Micromon käyttöohje Sami Tikkanen 0400 779591 sami.tikkanen@combicool.fi Oy Combi Cool Ab 1 m2 ja Micromon erot m2 Laajennettavissa 99 pisteeseen m2 + yksiköllä Ohjelmointi valikoista Micromon Ei laajennettavissa
Käyttöohje EMT757 / 3567 Ohjelmoitava digitaalinen kellokytkin
 Käyttöohje EMT757 / 3567 Ohjelmoitava digitaalinen kellokytkin A. Toiminnot 1. Käytetään päällä/pois -aikojen asettamiseen, säätämään erilaisia aikajaksoja virran päälläololle. Toimii erilaisten laitteiden
Käyttöohje EMT757 / 3567 Ohjelmoitava digitaalinen kellokytkin A. Toiminnot 1. Käytetään päällä/pois -aikojen asettamiseen, säätämään erilaisia aikajaksoja virran päälläololle. Toimii erilaisten laitteiden
Nexetic Shield Unlimited
 Nexetic Shield Unlimited Käyttöohje 1. Asennus ja käyttöönotto 2. Ohjelman käyttäminen 3. Lisäasetukset 4. Tietojen palautus 1. Asennus ja käyttöönotto Asiakasohjelman asennus Tehtyäsi tilauksen varmistusohjelmasta
Nexetic Shield Unlimited Käyttöohje 1. Asennus ja käyttöönotto 2. Ohjelman käyttäminen 3. Lisäasetukset 4. Tietojen palautus 1. Asennus ja käyttöönotto Asiakasohjelman asennus Tehtyäsi tilauksen varmistusohjelmasta
Käyttöohje. Sida 1. BRT-12 Battery Replacement Tool
 Käyttöohje Sida 1 Sisältö JOHDANTO... 3 Turvallisuustiedote... 3 Tuotetietoa... 3 NÄYTTÖ JA NÄPPÄIMISTÖ... 4 KÄYTTÖLITTYMÄ... 5 BRT-12 KÄYTTÖÖNOTTO... 6 PÄÄVALIKKO... 7 AKUN VAIHTO... 8 KIELEN VALITSEMINEN...
Käyttöohje Sida 1 Sisältö JOHDANTO... 3 Turvallisuustiedote... 3 Tuotetietoa... 3 NÄYTTÖ JA NÄPPÄIMISTÖ... 4 KÄYTTÖLITTYMÄ... 5 BRT-12 KÄYTTÖÖNOTTO... 6 PÄÄVALIKKO... 7 AKUN VAIHTO... 8 KIELEN VALITSEMINEN...
Rider 40 Rider 40:ssä on neljä näppäintä, joita käytetään useisiin eri tarkoituksiin.
 40 Pikaopas Rider 40 Rider 40:ssä on neljä näppäintä, joita käytetään useisiin eri tarkoituksiin. Näppäintoiminnot 2 1 Lämmittely Kohde Min Kesto lyöntiä /min Maks min 2 3 4 Lisävarusteet Rider 40:n toimitukseen
40 Pikaopas Rider 40 Rider 40:ssä on neljä näppäintä, joita käytetään useisiin eri tarkoituksiin. Näppäintoiminnot 2 1 Lämmittely Kohde Min Kesto lyöntiä /min Maks min 2 3 4 Lisävarusteet Rider 40:n toimitukseen
- Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset
 Phantom / H3-3D Gimbal Kalibrointiohjeet - Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset Aloitus: DJI
Phantom / H3-3D Gimbal Kalibrointiohjeet - Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset Aloitus: DJI
Konfiguraatiotyökalun päivitys
 Konfiguraatiotyökalun päivitys Kuinka aloitan? Konfiguraatiotyökalu avataan niin kuin aiemminkin suoraan Tenstar clientin käyttöliittymästä, tai harjoituksen ollessa käynnissä. Kuinka aloitan konfiguraatiotyökalun
Konfiguraatiotyökalun päivitys Kuinka aloitan? Konfiguraatiotyökalu avataan niin kuin aiemminkin suoraan Tenstar clientin käyttöliittymästä, tai harjoituksen ollessa käynnissä. Kuinka aloitan konfiguraatiotyökalun
TigerStop Standard Digitaalinen Syöttölaite / Stoppari
 Perkkoonkatu 5 Puh. 010 420 72 72 www.keyway.fi 33850 Tampere Fax. 010 420 72 77 palvelu@keyway.fi TigerStop Standard Digitaalinen Syöttölaite / Stoppari Malli Työpituus Kokonaispituus Standardi mm mm
Perkkoonkatu 5 Puh. 010 420 72 72 www.keyway.fi 33850 Tampere Fax. 010 420 72 77 palvelu@keyway.fi TigerStop Standard Digitaalinen Syöttölaite / Stoppari Malli Työpituus Kokonaispituus Standardi mm mm
Modulaatio-ohjauksen toimimoottori AME 85QM
 Modulaatio-ohjauksen toimimoottori AME 85QM Kuvaus AME 85QM -toimimoottoria käytetään AB-QM DN 200- ja DN 250 -automaattiisissa virtauksenrajoitin ja säätöventtiileissä. Ominaisuudet: asennon ilmaisu automaattinen
Modulaatio-ohjauksen toimimoottori AME 85QM Kuvaus AME 85QM -toimimoottoria käytetään AB-QM DN 200- ja DN 250 -automaattiisissa virtauksenrajoitin ja säätöventtiileissä. Ominaisuudet: asennon ilmaisu automaattinen
WehoFloor RF LCD 868MHz & laajennusmoduuli 4 tai 6 kanavalle
 WehoFloor RF LCD 868MHz & laajennusmoduuli 4 tai 6 kanavalle KÄYTTÖOHJE WehoFloor RF LCD langaton kytkentäyksikkö (6 kanavalle) & laajennusmoduuli (4 tai 6 kanavalle) 868 MHz 2-6 1. KÄYTTÖOHJE WFHC langaton
WehoFloor RF LCD 868MHz & laajennusmoduuli 4 tai 6 kanavalle KÄYTTÖOHJE WehoFloor RF LCD langaton kytkentäyksikkö (6 kanavalle) & laajennusmoduuli (4 tai 6 kanavalle) 868 MHz 2-6 1. KÄYTTÖOHJE WFHC langaton
"PLEXTALK Pocket" -verkkosoittimen pikaopas
 "PLEXTALK Pocket" -verkkosoittimen pikaopas PLEXTALK Pocketin asetukset 1. Käännä PLEXTALK Pocket ympäri. Varmista, että kaksi pientä uloketta ovat ylhäällä. Paina PLEXTALK Pocketin pohjassa olevaa suorakulmaista
"PLEXTALK Pocket" -verkkosoittimen pikaopas PLEXTALK Pocketin asetukset 1. Käännä PLEXTALK Pocket ympäri. Varmista, että kaksi pientä uloketta ovat ylhäällä. Paina PLEXTALK Pocketin pohjassa olevaa suorakulmaista
NAO ROBOTIN PIKAOHJE. Naon purkaminen kuljetuslaatikosta. Mika Lammassaari 2019
 NAO ROBOTIN PIKAOHJE Naon purkaminen kuljetuslaatikosta Nao robotti säilytetään kuljetuslaatikossa, jossa sitä on turvallista liikutella paikasta toiseen. Kun avaat kuljetuslaatikon kannen, huomaat että
NAO ROBOTIN PIKAOHJE Naon purkaminen kuljetuslaatikosta Nao robotti säilytetään kuljetuslaatikossa, jossa sitä on turvallista liikutella paikasta toiseen. Kun avaat kuljetuslaatikon kannen, huomaat että
1 Tivax siirto uuteen koneeseen
 Tivax siirto uuteen koneeseen 1 1 Tivax siirto uuteen koneeseen 1.1 Tivax ohjelman asentaminen Huom. Siirrossa mahdollisesti esiintyvien ongelmien ratkaisu on veloituksetonta ainoastaan asiakkaille, joilla
Tivax siirto uuteen koneeseen 1 1 Tivax siirto uuteen koneeseen 1.1 Tivax ohjelman asentaminen Huom. Siirrossa mahdollisesti esiintyvien ongelmien ratkaisu on veloituksetonta ainoastaan asiakkaille, joilla
Quha Zono. Käyttöohje
 Quha Zono Käyttöohje 2 Virtakytkin/ merkkivalo USB-portti Kiinnitysura Tervetuloa käyttämään Quha Zono -hiiriohjainta! Tämä käyttöohje kertoo tuotteen ominaisuuksista ja opastaa laitteen käyttöön. Lue
Quha Zono Käyttöohje 2 Virtakytkin/ merkkivalo USB-portti Kiinnitysura Tervetuloa käyttämään Quha Zono -hiiriohjainta! Tämä käyttöohje kertoo tuotteen ominaisuuksista ja opastaa laitteen käyttöön. Lue
Laboratoriotyö. 1. Laitteisto. 1.1 Kamera
 Laboratoriotyö 1. Laitteisto 1.1 Kamera Järjestelmän kamerassa (Hitachi, VK-C77E) on CCD -kenno ja mahdollisuus kuvan asynkroniseen päivitykseen. Kamerassa on sarjaliitäntä, jonka kautta voidaan ohjata
Laboratoriotyö 1. Laitteisto 1.1 Kamera Järjestelmän kamerassa (Hitachi, VK-C77E) on CCD -kenno ja mahdollisuus kuvan asynkroniseen päivitykseen. Kamerassa on sarjaliitäntä, jonka kautta voidaan ohjata
VIP Mobile Android. Opas asennukseen ja tärkeimpien toimintojen käyttöön
 VIP Mobile ndroid Opas asennukseen ja tärkeimpien toimintojen käyttöön TSP-3719_1-1305 sennus Seuraavassa saat yksinkertaiset ohjeet VIP-sovelluksen asentamiseksi puhelimeesi. lla olevat vaiheet tarvitsee
VIP Mobile ndroid Opas asennukseen ja tärkeimpien toimintojen käyttöön TSP-3719_1-1305 sennus Seuraavassa saat yksinkertaiset ohjeet VIP-sovelluksen asentamiseksi puhelimeesi. lla olevat vaiheet tarvitsee
Eye Pal Solo. Käyttöohje
 Eye Pal Solo Käyttöohje 1 Eye Pal Solon käyttöönotto Eye Pal Solon pakkauksessa tulee kolme osaa: 1. Peruslaite, joka toimii varsinaisena lukijana ja jonka etureunassa on laitteen ohjainpainikkeet. 2.
Eye Pal Solo Käyttöohje 1 Eye Pal Solon käyttöönotto Eye Pal Solon pakkauksessa tulee kolme osaa: 1. Peruslaite, joka toimii varsinaisena lukijana ja jonka etureunassa on laitteen ohjainpainikkeet. 2.
1. Yleistä. Kuva 1. Graafinen ohjauspaneeli LCD-näytöllä. Taajuusmuuttajan tila. Panel Ready. 3 Motor Current 3.4 A PAINONÄPPÄIMET
 VACON CX/CXL/CXS Graafinen ohjauspaneeli Sivu 1 1. Yleistä Taajuusmuuttajan tila Panel / Remote = Aktiivinen ohjauspaikka Ready = Syöttöjännitte on kytketty ja taajuusmuuttaja on valmis käyttöön Fault
VACON CX/CXL/CXS Graafinen ohjauspaneeli Sivu 1 1. Yleistä Taajuusmuuttajan tila Panel / Remote = Aktiivinen ohjauspaikka Ready = Syöttöjännitte on kytketty ja taajuusmuuttaja on valmis käyttöön Fault
TTY TKT-1110 Mikroprosessorit TKT. HEW-ohjeet ver 1.0
 Johdanto Nämä ohjeet opastavat sinut tekemään kurssiin TKT-1110 Mikroprosessorit liittyvät harjoitustyöt. Ohjeet sisältävät kolme osiota. Ensimmäisenä esitellään projektin luonti, mikä tehdään ainoastaan
Johdanto Nämä ohjeet opastavat sinut tekemään kurssiin TKT-1110 Mikroprosessorit liittyvät harjoitustyöt. Ohjeet sisältävät kolme osiota. Ensimmäisenä esitellään projektin luonti, mikä tehdään ainoastaan
Peilittömien kameroiden, NIKKOR Z-objektiivien ja yhteensopivien lisävarusteiden laiteohjelmiston päivitys
 Peilittömien kameroiden, NIKKOR Z-objektiivien ja yhteensopivien lisävarusteiden laiteohjelmiston päivitys Kiitos, että valitsit Nikon-tuotteen. Tässä oppaassa kuvataan kuinka päivitetään Nikonin peilittömien
Peilittömien kameroiden, NIKKOR Z-objektiivien ja yhteensopivien lisävarusteiden laiteohjelmiston päivitys Kiitos, että valitsit Nikon-tuotteen. Tässä oppaassa kuvataan kuinka päivitetään Nikonin peilittömien
CABAS. Perusominaisuuksien käyttö
 CABAS Perusominaisuuksien käyttö Aloitussivu s.3-4 Laskelman luominen s.5-6 Omistajan/Ajoneuvon tiedot s.7-8 Vahinkotiedot s.9 Veloitukset s.10 Korjauskohteet s.11 Toimenpiteet/korjauskohteet s.12-14 Pintaoikaisu
CABAS Perusominaisuuksien käyttö Aloitussivu s.3-4 Laskelman luominen s.5-6 Omistajan/Ajoneuvon tiedot s.7-8 Vahinkotiedot s.9 Veloitukset s.10 Korjauskohteet s.11 Toimenpiteet/korjauskohteet s.12-14 Pintaoikaisu
Vehicle Security System VSS3 - Alarm system remote
 Vehicle Security System VSS3 - Alarm system remote Hälytysjärjestelmän kauko-ohjain Asetusopas - Finnish Arvoisa asiakas Tässä oppaassa on tietoja ja ohjeita siitä, miten eräitä toimintoja otetaan käyttöön
Vehicle Security System VSS3 - Alarm system remote Hälytysjärjestelmän kauko-ohjain Asetusopas - Finnish Arvoisa asiakas Tässä oppaassa on tietoja ja ohjeita siitä, miten eräitä toimintoja otetaan käyttöön
Yleishimmentimellä varustetun, uppoasennettavan WMR-252-vastaanottimen käyttöopas
 Yleishimmentimellä varustetun, uppoasennettavan WMR-252-vastaanottimen käyttöopas Ainutlaatuinen, himmennystoiminnolla varustettu langaton yleisvastaanotin esimerkiksi himmennettävien 230 voltin LEDvalojen,
Yleishimmentimellä varustetun, uppoasennettavan WMR-252-vastaanottimen käyttöopas Ainutlaatuinen, himmennystoiminnolla varustettu langaton yleisvastaanotin esimerkiksi himmennettävien 230 voltin LEDvalojen,
Internet Explorer 7 & 8 pop-up asetukset
 Sivu 1(8) Internet Explorer 7 & 8 pop-up asetukset www.procountor.com Internet Explorer 7 ja 8 sisältää pop-up ikkunoiden esto toiminnon. ProCountor -Taloushallintoohjelmistossa voidaan raportit tulostaa
Sivu 1(8) Internet Explorer 7 & 8 pop-up asetukset www.procountor.com Internet Explorer 7 ja 8 sisältää pop-up ikkunoiden esto toiminnon. ProCountor -Taloushallintoohjelmistossa voidaan raportit tulostaa
JOVISION IP-KAMERA Käyttöohje
 JOVISION IP-KAMERA Käyttöohje 1 Yleistä... 2 2 Kameran kytkeminen verkkoon... 2 2.1 Tietokoneella... 2 2.2 Älypuhelimella / tabletilla... 5 3 Salasanan vaihtaminen... 8 3.1 Salasanan vaihtaminen Windows
JOVISION IP-KAMERA Käyttöohje 1 Yleistä... 2 2 Kameran kytkeminen verkkoon... 2 2.1 Tietokoneella... 2 2.2 Älypuhelimella / tabletilla... 5 3 Salasanan vaihtaminen... 8 3.1 Salasanan vaihtaminen Windows
Käyttöpaneelin käyttäminen
 Tässä jaksossa on tietoja käyttöpaneelin käytöstä, tulostimen asetusten muuttamisesta ja käyttöpaneelin valikoiden sisällöstä. 1 Useimpia tulostimen asetuksia voi muuttaa sovellusohjelmasta tai tulostinajurista.
Tässä jaksossa on tietoja käyttöpaneelin käytöstä, tulostimen asetusten muuttamisesta ja käyttöpaneelin valikoiden sisällöstä. 1 Useimpia tulostimen asetuksia voi muuttaa sovellusohjelmasta tai tulostinajurista.
sivu 1 Verkkopäätteen muuttaminen Anvian uuteen tekniikkaan Ohje käy seuraaviin verkkopäätteisiin
 sivu 1 Verkkopäätteen muuttaminen Anvian uuteen tekniikkaan Ohje käy seuraaviin verkkopäätteisiin Zyxel Prestige 645 ISP Zyxel Prestige 645 WEB Zyxel Prestige 645R Zyxel Prestige 645 Ennen aloitusta tarkista,
sivu 1 Verkkopäätteen muuttaminen Anvian uuteen tekniikkaan Ohje käy seuraaviin verkkopäätteisiin Zyxel Prestige 645 ISP Zyxel Prestige 645 WEB Zyxel Prestige 645R Zyxel Prestige 645 Ennen aloitusta tarkista,
Fixcom Webmail ohje. Allekirjoitus. Voit lisätä yhden tai useamman allekirjoituksen.
 Webmail on monipuolinen työkalu jolla voi tehdä paljon muutakin kuin lukea sähköpostia. Tässä ohjeessa on lyhyesti esitelty joitakin sen ominaisuuksia. Peruspostilaatikossa ei ole kaikkia ominaisuuksia,
Webmail on monipuolinen työkalu jolla voi tehdä paljon muutakin kuin lukea sähköpostia. Tässä ohjeessa on lyhyesti esitelty joitakin sen ominaisuuksia. Peruspostilaatikossa ei ole kaikkia ominaisuuksia,
Yleistä. Probyte GSM-PLUG PROBYTE OY
 Probyte GSM-PLUG PROBYTE OY Yleistä PROBYTE GSM PLUG on reaaliaikainen ja interaktiivinen GSM-ohjauslaite, jolla käyttäjä voi helposti ohjata puhelimen välityksellä verkkokäyttöistä laittetta. Käyttäjä
Probyte GSM-PLUG PROBYTE OY Yleistä PROBYTE GSM PLUG on reaaliaikainen ja interaktiivinen GSM-ohjauslaite, jolla käyttäjä voi helposti ohjata puhelimen välityksellä verkkokäyttöistä laittetta. Käyttäjä
Sähköpostitilin käyttöönotto. Versio 2.0
 Sähköpostitilin käyttöönotto Versio 2.0 Sivu 1 / 10 Jarno Parkkinen jarno@atflow.fi 1 Johdanto... 2 2 Thunderbird ohjelman lataus ja asennus... 3 3 Sähköpostitilin lisääminen ja käyttöönotto... 4 3.1 Tietojen
Sähköpostitilin käyttöönotto Versio 2.0 Sivu 1 / 10 Jarno Parkkinen jarno@atflow.fi 1 Johdanto... 2 2 Thunderbird ohjelman lataus ja asennus... 3 3 Sähköpostitilin lisääminen ja käyttöönotto... 4 3.1 Tietojen
HDS Gen3 Pikaopas. Yleiskuvaus. Nro Näppäin Toiminto
 HDS Gen3 Pikaopas FI Yleiskuvaus 1 4 6 5 7 2 3 8 9 10 11 Nro Näppäin Toiminto 1 Kosketusnäyttö 2 Sivut-näppäin Aktivoi aloitussivun Kohdistin- Siirtää kohdistinta, siirtyy valikkokohteissa ja säätää arvoja
HDS Gen3 Pikaopas FI Yleiskuvaus 1 4 6 5 7 2 3 8 9 10 11 Nro Näppäin Toiminto 1 Kosketusnäyttö 2 Sivut-näppäin Aktivoi aloitussivun Kohdistin- Siirtää kohdistinta, siirtyy valikkokohteissa ja säätää arvoja
Salasanojen hallinta. Salasanojen hallintaopas RESTAURANT ENTERPRISE SOLUTION
 Salasanojen hallinta Salasanojen hallintaopas RESTAURANT ENTERPRISE SOLUTION Restaurant Enterprise Solution Asiakirjan tarkoitus Tämä asiakirja kertoo tarvittavat säännöt kuinka hallinnoida RES salasanoja
Salasanojen hallinta Salasanojen hallintaopas RESTAURANT ENTERPRISE SOLUTION Restaurant Enterprise Solution Asiakirjan tarkoitus Tämä asiakirja kertoo tarvittavat säännöt kuinka hallinnoida RES salasanoja
Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla.
 Speedohealer V4 Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla. 1. Esipuhe Onnittelemme sinua Speedohealer laitteen oston johdosta. HealTech Electronics Ltd. on omistautunut
Speedohealer V4 Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla. 1. Esipuhe Onnittelemme sinua Speedohealer laitteen oston johdosta. HealTech Electronics Ltd. on omistautunut
OpenOffice.org Impress 3.1.0
 OpenOffice.org Impress 3.1.0 Sisällysluettelo 1 Esityksen luominen...1 2 Dian rakenne...2 3 Dian lisääminen, poistaminen, siirtäminen ja kopioiminen...3 4 Diojen koon muuttaminen...3 5 Pohjatyylisivut...4
OpenOffice.org Impress 3.1.0 Sisällysluettelo 1 Esityksen luominen...1 2 Dian rakenne...2 3 Dian lisääminen, poistaminen, siirtäminen ja kopioiminen...3 4 Diojen koon muuttaminen...3 5 Pohjatyylisivut...4
Phantom / H3-3D Gimbal Kalibrointiohjeet. Aloitus:
 Phantom / H3-3D Gimbal Kalibrointiohjeet - Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset - IMU kalibrointi
Phantom / H3-3D Gimbal Kalibrointiohjeet - Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset - IMU kalibrointi
3.3 Kurssin palauttaminen
 3.3 Kurssin palauttaminen Yleistä kurssin palauttamisesta Kurssipohjan tulee olla luotuna Moodleen ennen kuin sen päälle voi palauttaa varmuuskopion. Yleensä palauttaminen kannattaa tehdä siten, että entisen
3.3 Kurssin palauttaminen Yleistä kurssin palauttamisesta Kurssipohjan tulee olla luotuna Moodleen ennen kuin sen päälle voi palauttaa varmuuskopion. Yleensä palauttaminen kannattaa tehdä siten, että entisen
Skype for Business ohjelman asennus- ja käyttöohje Sisällys
 Skype for Business ohjelman asennus- ja käyttöohje Sisällys Kirjautuminen Office 365 -palveluun... 2 Skype for Business ohjelman asentaminen... 3 Yhteyshenkilöiden lisääminen Skype for Business ohjelmassa...
Skype for Business ohjelman asennus- ja käyttöohje Sisällys Kirjautuminen Office 365 -palveluun... 2 Skype for Business ohjelman asentaminen... 3 Yhteyshenkilöiden lisääminen Skype for Business ohjelmassa...
Yale Doorman -käyttöohje Sector Alarm -hälytysjärjestelmään yhdistetyn Yale Doorman -älylukon käyttöohje
 Yale Doorman -käyttöohje Sector Alarm -hälytysjärjestelmään yhdistetyn Yale Doorman -älylukon käyttöohje Valo- ja äänimerkit koodinäppäimistöllä, kun älylukkoa käytetään ulkopuolelta Lukittaessa näppäimistön
Yale Doorman -käyttöohje Sector Alarm -hälytysjärjestelmään yhdistetyn Yale Doorman -älylukon käyttöohje Valo- ja äänimerkit koodinäppäimistöllä, kun älylukkoa käytetään ulkopuolelta Lukittaessa näppäimistön
Office 365 palvelujen käyttöohje Sisällys
 Office 365 palvelujen käyttöohje Sisällys Sisäänkirjautuminen... 2 Office 365:n käyttöliittymä... 3 Salasanan vaihto... 5 Outlook-sähköpostin käyttö... 7 Outlook-kalenterin käyttö... 10 OneDriven käyttö...
Office 365 palvelujen käyttöohje Sisällys Sisäänkirjautuminen... 2 Office 365:n käyttöliittymä... 3 Salasanan vaihto... 5 Outlook-sähköpostin käyttö... 7 Outlook-kalenterin käyttö... 10 OneDriven käyttö...
DumpDbox-ohjelmiston asennus- ja käyttöohjeet Sisällys
 DumpDbox-ohjelmiston asennus- ja käyttöohjeet Sisällys 1. Esittely... 2 2. Asennusohjeet... 2 3. Yleiskuva ohjelmistosta... 3 4. Tietojen siirtäminen D-Boxin avulla... 4 4.1. Piirturitiedostojen siirtäminen...
DumpDbox-ohjelmiston asennus- ja käyttöohjeet Sisällys 1. Esittely... 2 2. Asennusohjeet... 2 3. Yleiskuva ohjelmistosta... 3 4. Tietojen siirtäminen D-Boxin avulla... 4 4.1. Piirturitiedostojen siirtäminen...
Sport In The Box Käyttöohje
 Sport In The Box Käyttöohje Esivalmistelut: Kytke käytössä oleva pelikello/konsoli kiinni USBkaapelilla tietokoneeseen ennen virran kytkemistä pelikelloon/konsoliin. Odota että laite on asennettu käyttövalmiiksi,
Sport In The Box Käyttöohje Esivalmistelut: Kytke käytössä oleva pelikello/konsoli kiinni USBkaapelilla tietokoneeseen ennen virran kytkemistä pelikelloon/konsoliin. Odota että laite on asennettu käyttövalmiiksi,