Robotiikka, (Konenäkö), Mobiili robotiikka. Teknologiademot on the Road
|
|
|
- Sanna Uotila
- 8 vuotta sitten
- Katselukertoja:
Transkriptio

1 Robotiikka, (Konenäkö), Mobiili robotiikka Teknologiademot on the Road
2 Robottityypit ja mekaaninen rakenne J. Pakkanen 2015, T. Koukkari 2016 Standardin SFS-EN ISO mukaan robotti on: Automaattisesti ohjattu Uudelleen ohjelmoitava Monikäyttöinen toimilaite Kolme tai useampia vapausasteita Kiinteästi asennettu tai liikuteltava
3 Robottien käyttö teollisuudessa Yleisin tuotantotapa on kiinteän automaation ja ihmistyövoiman yhdistelmä Robotisaatio tarjoaa vaihtoehdon! Robotisoinnin tavoitteet Tasaisempi laatu Korkeampi kapasiteetti Vaarallisten, vaikeiden tai tylsien työvaiheiden poistaminen
4 Manipulaattorit Manipulaattori on laite, joka siirtää osia, kappaleita tai laitteita noudattaen yksinkertaista toistuvaa rutiinia. Mikäli rutiinit ovat monimutkaisia ja niitä voidaan muutella, puhutaan robotista.


5 Robottityypit ja -rakenteet PicRef: Toshiba, Fanuc, adept, ETF Robotics

6 PicRef: ABB, Motoman, adept, Robottityypit ja -rakenteet
7 Portaalirobotti Yksinkertainen ja modulaarinen rakenne Rakenne mahdollistaa laajat työalueet Pystyy käsittelemään suuria massoja Helppo ohjelmoida Tyypilliset tehtävät: Konepalvelu Pakkaus Kokoonpano PicRef: Bosch Rexroth
8 SCARA ROBOT Jäykkä vertikaalinen rakenne Erittäin nopea Tyypilliset tehtävät: Kokoonpano elektroniikka PicRef: 3D CAD Browser
9 RINNAKKAISRAKENTEINEN ROBOTTI Useita rinnakkaisia niveliä Jäykempi rakenne, mutta silti erittäin nopea Suht rajallinen liikealue Yksi perussovellus on Stewardin alusta, jossa kaksi levyä on liitetty toisiinsa kuudella lineaarisella nivelellä. PicRef: adept, Fanuc Tyypilliset tehtävät: Pakkaus Kokoonpano/asennus
10 KÄSITTELYLAITTEET (Ulkoiset akselit) PicRef: ML Material
11 Kinematiikka Suora kinematiikka työkalun aseman laskenta vapausasteiden paikkatietojen perusteella missä on robotin työkalupiste tällä hetkellä Käänteinen kinematiikka vapausasteiden paikka-arvojen laskenta työkalun aseman perusteella miten robotti saavuttaa tietyn pisteen liikeavaruudessaan
12 J. Pakkanen 2015 Teollisuusrobotti
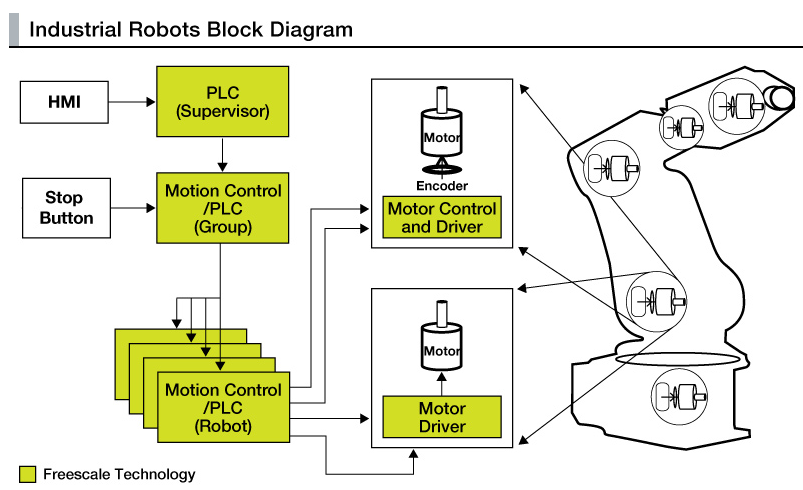
13 Robotin perusrakenne Ohjelmointiyksikkö Ohjain Manipulaattori

14 Teollisuusrobotti Joint 4 Joint 5 Joint 6 Joint 3 Joint 2 Joint 1
15 Mekaaninen rakenne
16 Robotin koordinaattijärjestelmät J. Pakkanen 2015
17 Koordinaattijärjestelmä Robottikäden liikkeet on kuvattu useassa eri koordinaattijärjestelmässä peruskoordinaatisto maailmankoordinaatisto käyttäjäkoordinaatisto kohteen koordinaatisto (kappale) työkalukoordinaatisto Jokainen koordinaatisto viittaa eri fyysiseen sijaintiin.
18 Koordinaattijärjestelmä
19 Robotiikka ABB Robotin ohjelmointi, joitain esimerkkejä J. Pakkanen 2015
20 Liikekäsky sisältää : TCP:n paikkatieto (X,Y,Z ja työkalun asento) Paikka voi olla tähtenä (*) tai sille voi antaa nimen. MoveL * v 1000, Z50, Tool0, Wob 0 Liikekäskytyyppi Nopeus Työkaludata Työkappaledata Paikoitustarkkuus
21 Liikekäskyt: MoveL Lineaariliike. Liikkeen aikana työkalun orientaatio pysyy samana MoveL * v 1000, Z50, tool0 A B Aloituspiste (edellinen piste).
22 Liikekäskyt: MoveJ Join-liike. Jokaista robotin akseli ohjataan yhtäaikaa siten että kaikki akselit saavuttavat nivelarvon samanaikaisesti. MoveJ * v 1000, Z50, tool0 A B Aloituspiste (edellinen piste).
23 Liikekäskyt: MoveC Ympyränkaari liike. Työkalun orientaatio pysyy samana liikkeen ajan MoveC, käsky tarvitsee kaksi paikkatietoa. MoveC *, * v 1000, Z50, tool0 Aloitus. Edellisen käskyn paikka.
24 Offset-poikkeaman ohjelmointi Esimerkki p1 100mm 80mm MoveL p1, MoveL offs(p1, 0, 100, 0), MoveL offs(p1, 80, 100, 0), MoveL offs(p1, 80, 0, 0), MoveL p1,...
25 Kommunikointi käyttäjän kanssa Kommunikointikäskyillä voidaan ohjelmakulun aikana esittää kysymyksiä tai antaa informaatiota ohjelmointilaitteen näytöllä. Vastaukset annetaan ohjelmointilaitteen numeronäppäimillä. TPReadNum TPReadFK TPWrite vastaukset tallentuvat halutun muuttujan arvoksi. TPErase
26 Ohjelman kulun kontrollointi Ohjelman kulku käskyillä määritellään missä järjestyksessä RAPID koodi toteutetaan. Ohjelman kulkuun vaikuttavia käskyjä: TEST WHILE IF FOR Compact IF GOTO EXIT,STOP BREAK
27 Ohjelman kulun kontrollointi Tulon odottaminen WaitDI DI10_1, 1 odota kunnes digitaalinen tulo DI10_1 = 1 ts. Ohjelmasuoritus jatkuu vasta kun DI10_1:n arvo on 1 WaitUntil DI10_1 = 1 AND DI10_2 = 1 käytetään useampien tulojen odottamiseen
28 Teollisuusrobotin offline-ohjelmointi
 suunnittelu ja testaus (Virtual Commissioning) Robottisimulaatio Robottikoodi")
29 Offline-ohjelmointi Offline-ohjelmointi: Luodaan simulointimallin perusteella robottivalmistajakohtaiset robottikoodit robottiohjaimeen Robottien seisokkiaikojen minimointi Ohjelmoinnin turvallisuus Ohjelman validointi ja testaus Laadun parantuminen ja vakiintuminen Robottisolun ohjauksen (PLC) suunnittelu ja testaus (Virtual Commissioning) Robottisimulaatio Robottikoodi robottiohjaimelle
30 Robottiturvallisuus ja yhteistyörobotiikka T. Koukkari 2016
31 Robottiturvallisuus perinteisesti PicRef: Suomen Robotiikkayhdistys Ry Turvaluokitellut komponentit Turvallisuus taataan erottamalla ihminen ja robotti toisistaan
32 Robottiturvallisuus, vaatimukset Robottiturvallisuuteen (automatisoitu tuotantosolu/kone) vaikuttavat säädökset lyhyesti Konedirektiivi 2006/42/EY Harmonisoi EU/ETA-alueella ensimmäistä kertaa markkinoille saatettavia tai käyttöön otettavia koneita koskevat säädökset SFS-EN ISO Koneturvallisuus. Yleiset suunnitteluperiaatteet, riskin arviointi ja riskin pienentäminen. SFS-EN ISO Koneturvallisuus. Turvallisuuteen liittyvät ohjausjärjestelmien osat. Osa 1: Yleiset suunnitteluperiaatteet SFS-EN ISO Robots and robotic devices - Safety requirements for industrial robots - Part 1: Robots SFS-EN ISO Robots and robotic devices - Safety requirements for industrial robots - Part 2: Robot systems and integration ISO/TS Robots and robotic devices Collaborative robots Yleistietoa standardeista:
33 Yhteistyörobotti Collaborative Robot Standardin SFS-EN ISO ja teknisen spesifikaation ISO/TS vaatimukset täyttävä robotti Suunniteltu toimimaan samassa tilassa ihmisen kanssa Robotti tunnistaa törmäyksen ja sen ympäristöönsä aiheuttamaa maksimivoimaa voidaan säätää aktiivisesti Etuja verrattuna perinteisiin teollisuusrobotteihin Nopeita asentaa ja käyttöönottaa, turvallisuusvälineiden kuten aitojen ja valoverhojen suunnittelulta voidaan välttyä Toimiminen yhdessä ihmisen kanssa
34 Yhteistyörobotiikka Collaborative Robotics Turvallisuusnäkökulmaa ei kuitenkaan voi unohtaa, vaan käyttökohteen turvallisuutta on tarkasteltava kokonaisuutena. Riskiarvio SFS-EN ISO mukaan on tehtävä. Esim. asioita joita täytyy ottaa huomioon: Raajojen jääminen robottien nivelten väliin saksiotteeseen Turvalliset liikenopeudet eri tilanteissa Tarttujan tartuntavoima Työkappaleiden ja tarttujan terävät lävistävät reunat Painavan työkuorman aiheuttama riski Jne.
35 Yhteistyörobotiikka, yhteistyörobotteja Universal Robots: UR-series Fanuc CR-35iA ja CR-7iA Joiden lisäksi saatavana tai tulossa: Yaskawa: HC Rethink Robotics MABI Robotic KUKA: LBR iiwa-series PicRef: Universal Robots, Fanuc, ABB, KUKA ABB YuMi


36 Yhteistyörobotiikka, turvallista ja joustavaa tarttujatekniikkaa Robotiq On Robot RG2 Schunk Co-act PicRef: On Robot, Robotiq, Schunk
37 Konenäkö robotin yhteydessä T. Koukkari 2016
38 Lavalta poiminta, 2D-kappaleenkäsittely Poimittavan kappaleen paikoitus on mahdollista toteuttaa yhden konenäkökameran avulla kun tartuttavat kappaleet ovat pinottavissa. Tartunnan syvyyssuunta (korkeus) voidaan hoitaa robotin ohjelmassa kun kappaleiden paksuus tunnetaan. Tapahtumasarja on seuraava: Konenäkökamera ottaa kuvan tasolta jossa kappaleet sijaitsevat. Konenäköohjelmisto etsii sille opetettuja muotoja kuvasta ja palauttaa robotille muodon xy-koordinaatit sekä kiertokulman z- akselin ympäri. Robotti käyttää kuvattavalle tasolle muodostettua käyttäjäkoordinaatistoa jossa robotti paikoitetaan kameralta tulevan tiedon perusteella.
39 Kasasta poiminta (bin picking), 3D-kappaleenkäsittely Kasasta poimittaessa kappaleiden orientaatiota ja syvyyssuuntaista sijaintia ei tunneta etukäteen. Tässä yhteydessä käytetään usein 3D-konenäkötekniikoita kuten stereokameroita ja rakenteista valoa. Kasasta muodostetaan siis pistepilvi josta ohjelmallisesti etsitään etukäteen opetettuja 3D-muotoja. Robotille palautetaan tässä tapauksessa siis kaikki xyzkoordinaatit sekä kiertokulmatieto kaikkien kolmen akselin suhteen. Esimerkkejä tämänkaltaisista laitteistoista: Fanuc irvision 3D Area Sensor Sick PLB vision system Pick-it camera system Yaskawa MotoSight 3D CanonVision
40 Mobiilit teollisuusrobotit - Mobile industrial robots T. Koukkari 2016
41 Mobiilit teollisuusrobotit Mobiili teollisuusrobotti on teollisuuskäyttöön tarkoitettu ohjelmoitava itsenäisesti liikkuva alusta jota käytetään esimerkiksi sisälogistiikan automatisointiin. Navigointi perustuu usein laserskannereihin eikä välttämättä vaadi ympäristöön asennettavia navigointiapuja (kuten lattiaan upotettava johdin tai tilan nurkkiin liimattavat heijastimet) Käytössä teollisuudessa ja esimerkiksi sairaalaympäristöissä.


42 Mobiilit teollisuusrobotit Esimerkkejä mobiileista roboteista: Mobile Industrial Robots ApS: MIR100 Adept: Courier KUKA: KMR iiwa Swisslog: RoboCourier Aethon: TUG Mobile Industrial Robots ApS: MIR100 Itsenäisesti navigoiva Max 100 kg kantavuus Toiminta-aika 10 h / 20 km Maksimi nopeus 1,5 m/s Rajapinta tietojärjestelmiin liittymiseksi PicRef: MIR
Konenäkö & Robotiikka Teknologiademot on the Road
 Konenäkö & Robotiikka Teknologiademot on the Road 1. Mitä konenäkö on? Automatisoitua digitaalisista kuvista tehtävää halutun tiedon analysointia ja tähän tietoon perustuvaa päätöksentekoa. Käytännössä
Konenäkö & Robotiikka Teknologiademot on the Road 1. Mitä konenäkö on? Automatisoitua digitaalisista kuvista tehtävää halutun tiedon analysointia ja tähän tietoon perustuvaa päätöksentekoa. Käytännössä
Mitä ovat yhteistyörobotit. Yhteistyörobotit ovat uusia työkavereita, robotteja jotka on tehty työskentelemään yhdessä ihmisten kanssa.
 Yhteistyörobotiikka Mitä ovat yhteistyörobotit Yhteistyörobotit ovat uusia työkavereita, robotteja jotka on tehty työskentelemään yhdessä ihmisten kanssa. Yhteistyörobotit saapuvat juuri oikeaan aikaan
Yhteistyörobotiikka Mitä ovat yhteistyörobotit Yhteistyörobotit ovat uusia työkavereita, robotteja jotka on tehty työskentelemään yhdessä ihmisten kanssa. Yhteistyörobotit saapuvat juuri oikeaan aikaan
ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2015
 v. 2015") ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2015 Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Robotin tehtävänä on
ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2015 Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Robotin tehtävänä on
Robotiikan tulevaisuus ja turvallisuus
 Robotiikan tulevaisuus ja turvallisuus NWE 2014 Satelliittiseminaari 4.11.2014 Jyrki Latokartano TTY Kone- ja Tuotantotekniikan laitos Suomen Robotiikkayhdistys ry Robottiturvallisuus? Kohti ihmisen ja
Robotiikan tulevaisuus ja turvallisuus NWE 2014 Satelliittiseminaari 4.11.2014 Jyrki Latokartano TTY Kone- ja Tuotantotekniikan laitos Suomen Robotiikkayhdistys ry Robottiturvallisuus? Kohti ihmisen ja
Digitaalinen valmistus. Teknologiademot on the Road
 Digitaalinen valmistus Teknologiademot on the Road 29.11.2016 CAM, Computer-aided Manufacturing Koneistus: 3D-mallin käyttö työstökoneiden ohjelmoinnissa (CAM) Ohjelmistoja käytetään erilaisten työstökeskusten
Digitaalinen valmistus Teknologiademot on the Road 29.11.2016 CAM, Computer-aided Manufacturing Koneistus: 3D-mallin käyttö työstökoneiden ohjelmoinnissa (CAM) Ohjelmistoja käytetään erilaisten työstökeskusten
Yhteistyörobotiikan tutkimus MoRo-hankkeen aloitusseminaari Ilari Marstio
 TEKNOLOGIAN TUTKIMUSKESKUS VTT OY Yhteistyörobotiikan tutkimus MoRo-hankkeen aloitusseminaari 26.10.2016 Ilari Marstio Yhteistyörobotiikka Miksi nyt? Perinteinen automaatio ei vastaa nykytuotannon tarpeisiin
TEKNOLOGIAN TUTKIMUSKESKUS VTT OY Yhteistyörobotiikan tutkimus MoRo-hankkeen aloitusseminaari 26.10.2016 Ilari Marstio Yhteistyörobotiikka Miksi nyt? Perinteinen automaatio ei vastaa nykytuotannon tarpeisiin
S11-09 Control System for an. Autonomous Household Robot Platform
 S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
 Työstäminen robotilla Zenex perustettu 1986 Erikoistunut teknisiin ohjelmistoihin Mastercam CAM-ohjelmisto Mathcad laskentaohjelmisto KeyCreator CAD (ent. CADKEY) Työstörataohjelmien hallinta, DNC etc.
Työstäminen robotilla Zenex perustettu 1986 Erikoistunut teknisiin ohjelmistoihin Mastercam CAM-ohjelmisto Mathcad laskentaohjelmisto KeyCreator CAD (ent. CADKEY) Työstörataohjelmien hallinta, DNC etc.
Aleksi Kyllönen ROBOTSTUDION KÄYTTÖ OPETUK- SESSA
 Aleksi Kyllönen ROBOTSTUDION KÄYTTÖ OPETUK- SESSA Tekniikka ja liikenne 2015 2 VAASAN AMMATTIKORKEAKOULU Konetekniikka TIIVISTELMÄ Tekijä Aleksi Kyllönen Opinnäytetyön nimi RobotStudion käyttö opetuksessa
Aleksi Kyllönen ROBOTSTUDION KÄYTTÖ OPETUK- SESSA Tekniikka ja liikenne 2015 2 VAASAN AMMATTIKORKEAKOULU Konetekniikka TIIVISTELMÄ Tekijä Aleksi Kyllönen Opinnäytetyön nimi RobotStudion käyttö opetuksessa
Teemu Rantala, ABB Oy, Robotics YuMi - Robotti ja ihminen yhdessä
 Teemu Rantala, ABB Oy, Robotics YuMi - Robotti ja ihminen yhdessä 3.11.2016 YuMi - Robotti ja ihminen yhdessä Digitalisaatio ja robotiikka teollisuudessa ABB Oy, Robotics YuMi-yhteistyörobotti Sovelluskohteita
Teemu Rantala, ABB Oy, Robotics YuMi - Robotti ja ihminen yhdessä 3.11.2016 YuMi - Robotti ja ihminen yhdessä Digitalisaatio ja robotiikka teollisuudessa ABB Oy, Robotics YuMi-yhteistyörobotti Sovelluskohteita
ROBOTIIKAN LABORATORIOTYÖ 2 ( )
") ROBOTIIKAN LABORATORIOTYÖ 2 (2016 17) Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Robotin tehtävänä on tyhjentää lava. Laatikot
ROBOTIIKAN LABORATORIOTYÖ 2 (2016 17) Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Robotin tehtävänä on tyhjentää lava. Laatikot
RAPID-ohjelmointikielen peruskäskyjä ja rakenteita
 RAPID-ohjelmointikielen peruskäskyjä ja rakenteita Ohjelmamoduli, Mainmodule Ohjelmadata Num Numeeriset arvot (rekisterit, laskurit) Bool Loogiset arvot (tosi/epätosi, true/false) Robtarget Paikoitusdata
RAPID-ohjelmointikielen peruskäskyjä ja rakenteita Ohjelmamoduli, Mainmodule Ohjelmadata Num Numeeriset arvot (rekisterit, laskurit) Bool Loogiset arvot (tosi/epätosi, true/false) Robtarget Paikoitusdata
Keräilyrobotit. Helander, Koskimäki, Saari, Turunen. Aalto-yliopisto Insinööritieteiden korkeakoulu Kon Tuotantoautomaatio
 Keräilyrobotit Helander, Koskimäki, Saari, Turunen Aalto-yliopisto Insinööritieteiden korkeakoulu Kon-15.4119 Tuotantoautomaatio 21.10.2015 Agenda 1. Yleistä robotisoinnista 2. Keräilyrobotit - Nivelvarsirobotti
Keräilyrobotit Helander, Koskimäki, Saari, Turunen Aalto-yliopisto Insinööritieteiden korkeakoulu Kon-15.4119 Tuotantoautomaatio 21.10.2015 Agenda 1. Yleistä robotisoinnista 2. Keräilyrobotit - Nivelvarsirobotti
Helppokäyttöistä ja joustavaa robotiikkaa
 Helppokäyttöistä ja joustavaa robotiikkaa Jyrki Latokartano TTY Kone- ja Tuotantotekniikan laitos Suomen Robotiikkayhdistys ry Takeoff! Seminaari, Savonia, Kuopio Jyrki Latokartano - Takeoff! Robottiautomaation
Helppokäyttöistä ja joustavaa robotiikkaa Jyrki Latokartano TTY Kone- ja Tuotantotekniikan laitos Suomen Robotiikkayhdistys ry Takeoff! Seminaari, Savonia, Kuopio Jyrki Latokartano - Takeoff! Robottiautomaation
Altus RTS. 1 Tekniset tiedot: 2 Lähetin: Telis 1 Telis 4 Centralis RTS
 Viitteet 000071 - Fi ASENNUS ohje Altus RTS Elektronisesti ohjattu putkimoottori, jossa RTSradiovastaanotin, aurinko- & tuuliautomatiikka SOMFY Altus RTS on putkimoottori, jonka rakenteeseen kuuluvat RTS-radiovastaanotin,
Viitteet 000071 - Fi ASENNUS ohje Altus RTS Elektronisesti ohjattu putkimoottori, jossa RTSradiovastaanotin, aurinko- & tuuliautomatiikka SOMFY Altus RTS on putkimoottori, jonka rakenteeseen kuuluvat RTS-radiovastaanotin,
VUOROVAIKUTTEISEN ROBOTIIKAN TURVALLISUUS
 MASINA loppuseminaari 14.5.2008 Tampere talo Timo Malm VUOROVAIKUTTEISEN ROBOTIIKAN TURVALLISUUS PUOLIAUTOMAATIORATKAISUT IHMINEN KONE JÄRJESTELMISSÄ (PATRA) Kesto: 5/2006 12/2007 Resurssit: n. 39 htkk;
MASINA loppuseminaari 14.5.2008 Tampere talo Timo Malm VUOROVAIKUTTEISEN ROBOTIIKAN TURVALLISUUS PUOLIAUTOMAATIORATKAISUT IHMINEN KONE JÄRJESTELMISSÄ (PATRA) Kesto: 5/2006 12/2007 Resurssit: n. 39 htkk;
Turvallisuus koneautomaatiossa
 Turvallisuus koneautomaatiossa Uusittu konedirektiivi ja sen soveltaminen Koneen valmistajan velvollisuudet Kone- ja pienjännitedirektiivin soveltaminen Koneyhdistelmä Koneen dokumentit ja CE -merkintä
Turvallisuus koneautomaatiossa Uusittu konedirektiivi ja sen soveltaminen Koneen valmistajan velvollisuudet Kone- ja pienjännitedirektiivin soveltaminen Koneyhdistelmä Koneen dokumentit ja CE -merkintä
Motoman XRC (tripla)
") Motoman XRC (tripla) Sisällys Johdanto ohjeeseen... 3 Motoman robottien käynnistys, ajo ja lopetus... 3 Robotin ajo ohjelmointipaneelilla... 3 Pihdin leuat kiinni/ auki... 3 Ohjelman ajo yhden kerran...
Motoman XRC (tripla) Sisällys Johdanto ohjeeseen... 3 Motoman robottien käynnistys, ajo ja lopetus... 3 Robotin ajo ohjelmointipaneelilla... 3 Pihdin leuat kiinni/ auki... 3 Ohjelman ajo yhden kerran...
Miten piensarjatuotantoon saadaan joustavuutta?
 Miten piensarjatuotantoon saadaan joustavuutta? Jyrki Latokartano, Tampereen teknillinen yliopisto Modernin robottitekniikan mahdollisuudet tuotannossa SeAMK 4.4.2017 kello 12.30-16.00 Miten piensarjatuotantoon
Miten piensarjatuotantoon saadaan joustavuutta? Jyrki Latokartano, Tampereen teknillinen yliopisto Modernin robottitekniikan mahdollisuudet tuotannossa SeAMK 4.4.2017 kello 12.30-16.00 Miten piensarjatuotantoon
Lasermerkkaimen robotisointi
 Karppinen Ville Lasermerkkaimen robotisointi Insinööri (AMK) Konetekniikka Kevät 2018 Tiivistelmä Tekijä(t): Karppinen Ville Työn nimi: Lasermerkkaimen robotisointi Tutkintonimike: Insinööri (AMK), konetekniikka
Karppinen Ville Lasermerkkaimen robotisointi Insinööri (AMK) Konetekniikka Kevät 2018 Tiivistelmä Tekijä(t): Karppinen Ville Työn nimi: Lasermerkkaimen robotisointi Tutkintonimike: Insinööri (AMK), konetekniikka
Petri Rinta-Jaskari TEOLLISUUSROBOTIN ETÄOHJEL- MOINTIYMPÄRISTÖN KEHITYS VISU- AL COMPONENTS 4.0 -OHJELMALLA
 Petri Rinta-Jaskari TEOLLISUUSROBOTIN ETÄOHJEL- MOINTIYMPÄRISTÖN KEHITYS VISU- AL COMPONENTS 4.0 -OHJELMALLA Tekniikka 2018 VAASAN AMMATTIKORKEAKOULU Konetekniikka TIIVISTELMÄ Tekijä Petri Rinta-Jaskari
Petri Rinta-Jaskari TEOLLISUUSROBOTIN ETÄOHJEL- MOINTIYMPÄRISTÖN KEHITYS VISU- AL COMPONENTS 4.0 -OHJELMALLA Tekniikka 2018 VAASAN AMMATTIKORKEAKOULU Konetekniikka TIIVISTELMÄ Tekijä Petri Rinta-Jaskari
ETÄOHJELMOINTIYMPÄRISTÖN LUOMINEN
 Tony Puharinen ETÄOHJELMOINTIYMPÄRISTÖN LUOMINEN T Tekniikka 2017 VAASAN AMMATTIKORKEAKOULU Kone- ja tuotantotekniikka TIIVISTELMÄ Tekijä Tony Puharinen Opinnäytetyön nimi Etäohjelmointiympäristön luominen
Tony Puharinen ETÄOHJELMOINTIYMPÄRISTÖN LUOMINEN T Tekniikka 2017 VAASAN AMMATTIKORKEAKOULU Kone- ja tuotantotekniikka TIIVISTELMÄ Tekijä Tony Puharinen Opinnäytetyön nimi Etäohjelmointiympäristön luominen
Robotteja liikenteessä
 Robotteja liikenteessä Mikä on robotti? Hoitaako robotit tulevaisuudessa ihmisten työt? Kuinka monta robottia tarvitaan vaihtamaan lamppu? PROJEKTITÖIDEN AIHEET (noin 3 hlöä/ryhmä) Teollisuusrobotit (industrial
Robotteja liikenteessä Mikä on robotti? Hoitaako robotit tulevaisuudessa ihmisten työt? Kuinka monta robottia tarvitaan vaihtamaan lamppu? PROJEKTITÖIDEN AIHEET (noin 3 hlöä/ryhmä) Teollisuusrobotit (industrial
Hyvinvointiteknologiaan painottuva koulutusohjelma- /osaamisalakokeilu TUTKINNON PERUSTEET KOKEILUA VARTEN
 Hyvinvointiteknologiaan painottuva koulutusohjelma- /osaamisalakokeilu TUTKINNON PERUSTEET KOKEILUA VARTEN Hyvinvointiteknologian koulutuskokeilujen yhteistyöpäivä 26.9.2014 Voimarinne, Sastamalan Karkku
Hyvinvointiteknologiaan painottuva koulutusohjelma- /osaamisalakokeilu TUTKINNON PERUSTEET KOKEILUA VARTEN Hyvinvointiteknologian koulutuskokeilujen yhteistyöpäivä 26.9.2014 Voimarinne, Sastamalan Karkku
Laboratoriotyö. 1. Laitteisto. 1.1 Kamera
 Laboratoriotyö 1. Laitteisto 1.1 Kamera Järjestelmän kamerassa (Hitachi, VK-C77E) on CCD -kenno ja mahdollisuus kuvan asynkroniseen päivitykseen. Kamerassa on sarjaliitäntä, jonka kautta voidaan ohjata
Laboratoriotyö 1. Laitteisto 1.1 Kamera Järjestelmän kamerassa (Hitachi, VK-C77E) on CCD -kenno ja mahdollisuus kuvan asynkroniseen päivitykseen. Kamerassa on sarjaliitäntä, jonka kautta voidaan ohjata
KUORMALAVAHYLLY ALFA
 KUORMALAVAHYLLY ALFA EAB KUORMALAVAHYLLY EAB:n kuormalavahylly kattaa vakiona laajan valikoiman eri levyisiä, syvyisiä ja korkuisia hyllyjä. Monipuolisilla lisävarusteilla rakennetaan tehokas ja toimiva
KUORMALAVAHYLLY ALFA EAB KUORMALAVAHYLLY EAB:n kuormalavahylly kattaa vakiona laajan valikoiman eri levyisiä, syvyisiä ja korkuisia hyllyjä. Monipuolisilla lisävarusteilla rakennetaan tehokas ja toimiva
Teollisuusrobotin simulointi Delmia-ohjelmistolla
 Teollisuusrobotin simulointi Delmia-ohjelmistolla Toni Ahonen Maaliskuu 2015 Automaatiotekniikan koulutusohjelma Tekniikan ja liikenteen ala Kuvailulehti Tekijä(t) AHONEN, Toni Julkaisun laji Opinnäytetyö
Teollisuusrobotin simulointi Delmia-ohjelmistolla Toni Ahonen Maaliskuu 2015 Automaatiotekniikan koulutusohjelma Tekniikan ja liikenteen ala Kuvailulehti Tekijä(t) AHONEN, Toni Julkaisun laji Opinnäytetyö
ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2014
 v. 2014") ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2014 Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Kuljettimelle 10 saapuva
ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2014 Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Kuljettimelle 10 saapuva
SIMULOINTIYMPÄRISTÖJEN SOVELTAMINEN OPETUKSESSA SIMULOINNILLA TUOTANTOA KEHITTÄMÄÄN-SEMINAARI TIMO SUVELA
 SOVELTAMINEN OPETUKSESSA SIMULOINNILLA TUOTANTOA KEHITTÄMÄÄN-SEMINAARI 2.12. TIMO SUVELA KUKA OLEN? Timo Suvela lehtori, sähkö- ja automaatiotekniikka (timo.suvela@samk.fi, 044-7103275) Nykyisyys SAMK:iin
SOVELTAMINEN OPETUKSESSA SIMULOINNILLA TUOTANTOA KEHITTÄMÄÄN-SEMINAARI 2.12. TIMO SUVELA KUKA OLEN? Timo Suvela lehtori, sähkö- ja automaatiotekniikka (timo.suvela@samk.fi, 044-7103275) Nykyisyys SAMK:iin
ABB ROBOTS IRC-5 Yleisohje
 ABB ROBOTS IRC-5 Yleisohje www.abb.com 2015 - M.Billing - Copyright 1 SISÄLLYSLUETTELO Järjestelmän osat ja koordinaatistot.... 3 Robottiturvallisuus..10 Ohjauskaappi ja Käsiohjain........ 16 Robotin käynnistys,
ABB ROBOTS IRC-5 Yleisohje www.abb.com 2015 - M.Billing - Copyright 1 SISÄLLYSLUETTELO Järjestelmän osat ja koordinaatistot.... 3 Robottiturvallisuus..10 Ohjauskaappi ja Käsiohjain........ 16 Robotin käynnistys,
FANUC ROBOTIT Yleisohje
 FANUC ROBOTIT Yleisohje www.fanucrobotics.com 1 Järjestelmän osat YLÄKÄSIVARSI KÄSIOHJAIN ALAKÄSIVARSI TYÖKALULAIPPA OHJAUSKAAPPI JALUSTA 2 Pääakselit Akselit (JOINT) J1, J2 ja J3 ovat robotin pääakselit.
FANUC ROBOTIT Yleisohje www.fanucrobotics.com 1 Järjestelmän osat YLÄKÄSIVARSI KÄSIOHJAIN ALAKÄSIVARSI TYÖKALULAIPPA OHJAUSKAAPPI JALUSTA 2 Pääakselit Akselit (JOINT) J1, J2 ja J3 ovat robotin pääakselit.
Oviverhopuhaltimet FLOWAIR.COM
 Oviverhopuhaltimet FLOWAIR.COM ILMAN LÄMPÖTILAN JAKAUTUMINEN HUONEISSA Ilman oviverhopuhallinta Oviverhopuhaltimella -1 C 22 C 2 C 21 C 2 C 22 C -8 C -6 C -4 C -2 C 19 C C 1 C 1 C 6 C C C 6 C 1 C 1 C 18
Oviverhopuhaltimet FLOWAIR.COM ILMAN LÄMPÖTILAN JAKAUTUMINEN HUONEISSA Ilman oviverhopuhallinta Oviverhopuhaltimella -1 C 22 C 2 C 21 C 2 C 22 C -8 C -6 C -4 C -2 C 19 C C 1 C 1 C 6 C C C 6 C 1 C 1 C 18
KOOSTE ROBOTTISOLULTA VAADITTAVISTA EHDOTTOMISTA OMINAISUUKSISTA
 LIITE 1. KOOSTE ROBOTTISOLULTA AADITTAISTA EHDOTTOMISTA OMINAISUUKSISTA Pyydämme täyttämään oheiseen taulukkoon vastaako tarjoamanne robottisolun järjestelmältä vaadittavia ehdottomia vaatimuksia. Täytetty
LIITE 1. KOOSTE ROBOTTISOLULTA AADITTAISTA EHDOTTOMISTA OMINAISUUKSISTA Pyydämme täyttämään oheiseen taulukkoon vastaako tarjoamanne robottisolun järjestelmältä vaadittavia ehdottomia vaatimuksia. Täytetty
Veli-Matti Pukkinen. Robottisolun simulointi. Opinnäytetyö Kevät 2011 Tekniikan yksikkö, Seinäjoki Tietotekniikka Mekatroniikka
 1 Veli-Matti Pukkinen Robottisolun simulointi Opinnäytetyö Kevät 2011 Tekniikan yksikkö, Seinäjoki Tietotekniikka Mekatroniikka 2 SEINÄJOEN AMMATTIKORKEAKOULU Opinnäytetyön tiivistelmä Koulutusyksikkö:
1 Veli-Matti Pukkinen Robottisolun simulointi Opinnäytetyö Kevät 2011 Tekniikan yksikkö, Seinäjoki Tietotekniikka Mekatroniikka 2 SEINÄJOEN AMMATTIKORKEAKOULU Opinnäytetyön tiivistelmä Koulutusyksikkö:
Robottien etäohjelmointiprojektin toteutus
 Robottien etäohjelmointiprojektin toteutus Moduuli 4: Hitsausprosessit ja hitsausrobotin ohjelmointi Robottihitsauksen tuottavuus ja tehokas käyttö Heikki Aalto ja Ari Lylynoja Esitelmän sisältö Mikä on
Robottien etäohjelmointiprojektin toteutus Moduuli 4: Hitsausprosessit ja hitsausrobotin ohjelmointi Robottihitsauksen tuottavuus ja tehokas käyttö Heikki Aalto ja Ari Lylynoja Esitelmän sisältö Mikä on
Robotit Suomessa toimialaselvitys
 AALTO-YLIOPISTO Insinööritieteiden korkeakoulu Kon-15.4119 Tuotantoautomaatio Robotit Suomessa toimialaselvitys Fanny Syrjänen 84460F Työ palautettu 21.10.2015 1 Sisällysluettelo 1. Johdanto... 3 2. Robotit...
AALTO-YLIOPISTO Insinööritieteiden korkeakoulu Kon-15.4119 Tuotantoautomaatio Robotit Suomessa toimialaselvitys Fanny Syrjänen 84460F Työ palautettu 21.10.2015 1 Sisällysluettelo 1. Johdanto... 3 2. Robotit...
YHTEISTYÖROBOTIN KÄYTTÖÖN- OTTO TESTAUSSOLUSSA
 Joonas Haapala YHTEISTYÖROBOTIN KÄYTTÖÖN- OTTO TESTAUSSOLUSSA Ampner Oy Tekniikka 2018 VAASAN AMMATTIKORKEAKOULU Kone- ja tuotantotekniikka TIIVISTELMÄ Tekijä Joonas Haapala Opinnäytetyön nimi Yhteistyörobotin
Joonas Haapala YHTEISTYÖROBOTIN KÄYTTÖÖN- OTTO TESTAUSSOLUSSA Ampner Oy Tekniikka 2018 VAASAN AMMATTIKORKEAKOULU Kone- ja tuotantotekniikka TIIVISTELMÄ Tekijä Joonas Haapala Opinnäytetyön nimi Yhteistyörobotin
lineaariyksikkö KR Kuvaus
 Moottori Lineaariliike Lineaariyksiköt lineaariyksikkö KR Erittäin kompakti ja jäykkä rakenne Kestää saman kuormituksen kaikissa neljässä suunnassa Suuri nopeus ja korkea kuormituskyky Kuvaus KR-lineaariyksikkö
Moottori Lineaariliike Lineaariyksiköt lineaariyksikkö KR Erittäin kompakti ja jäykkä rakenne Kestää saman kuormituksen kaikissa neljässä suunnassa Suuri nopeus ja korkea kuormituskyky Kuvaus KR-lineaariyksikkö
Hyvinvointiteknologiaan painottuva osaamisalakokeilu TUTKINTOJEN PERUSTEET KOKEILUA VARTEN
 Hyvinvointiteknologiaan painottuva osaamisalakokeilu TUTKINTOJEN PERUSTEET KOKEILUA VARTEN Väinehuollon, perustason ensihoidon ja hyvinvointiteknologian koulutuskokeilujen verkostopäivä 21.11.2014 Stadin
Hyvinvointiteknologiaan painottuva osaamisalakokeilu TUTKINTOJEN PERUSTEET KOKEILUA VARTEN Väinehuollon, perustason ensihoidon ja hyvinvointiteknologian koulutuskokeilujen verkostopäivä 21.11.2014 Stadin
Teollisuusrobotin käyttöönotto ja ohjelmointi
 Tommi Tuunanen Teollisuusrobotin käyttöönotto ja ohjelmointi Opinnäytetyö Sähkötekniikka Toukokuu 2014 KUVAILULEHTI Opinnäytetyön päivämäärä 7.5.2014 Tekijä(t) Tommi Tuunanen Koulutusohjelma ja suuntautuminen
Tommi Tuunanen Teollisuusrobotin käyttöönotto ja ohjelmointi Opinnäytetyö Sähkötekniikka Toukokuu 2014 KUVAILULEHTI Opinnäytetyön päivämäärä 7.5.2014 Tekijä(t) Tommi Tuunanen Koulutusohjelma ja suuntautuminen
ERGOLATOR. Henkilökohtainen nostoapulaite. 15 200 kg. ERGOLATOR erilaisten rullien käsittelyyn
 Henkilökohtainen nostoapulaite 5 00 kg ERGOLATOR erilaisten rullien käsittelyyn Henkilökohtainen nostoapulaite Jokaiselle oikea työskentelykorkeus ei turhaa kumartelua tai kurottamista. Portaaton nostonopeus
Henkilökohtainen nostoapulaite 5 00 kg ERGOLATOR erilaisten rullien käsittelyyn Henkilökohtainen nostoapulaite Jokaiselle oikea työskentelykorkeus ei turhaa kumartelua tai kurottamista. Portaaton nostonopeus
EAB Built to last Tarkkuus ja laatu ovat mukana kaikessa toiminnassamme, raakamateriaalin valinnassa,
 KUORMALAVAHYLLY EAB KUORMALAVAHYLLY 1 EAB:n kuormalavahylly kattaa vakiona laajan valikoiman eri levyisiä, syvyisiä ja korkuisia hyllyjä. Monipuolisilla lisävarusteilla rakennetaan tehokas ja toimiva varasto.
KUORMALAVAHYLLY EAB KUORMALAVAHYLLY 1 EAB:n kuormalavahylly kattaa vakiona laajan valikoiman eri levyisiä, syvyisiä ja korkuisia hyllyjä. Monipuolisilla lisävarusteilla rakennetaan tehokas ja toimiva varasto.
Miehittämätön laserleikkaus - käsin koskematta levystä lavalle 1/6
 Miehittämätön laserleikkaus - käsin koskematta levystä lavalle 1/6 2/6 Tietoa yrityksestä ASTES4 on Balernessa, Etelä-Sveitsissä, sijaitseva teolliseen automaatioon keskittynyt riippumaton yritys. ASTES4
Miehittämätön laserleikkaus - käsin koskematta levystä lavalle 1/6 2/6 Tietoa yrityksestä ASTES4 on Balernessa, Etelä-Sveitsissä, sijaitseva teolliseen automaatioon keskittynyt riippumaton yritys. ASTES4
ROBOTIIKKA. M.Billing 2015
 ROBOTIIKKA M.Billing 2015 ROBOTIT Mikä on robotti Minkälaisia robotteja on käytössä Minkälaisissa asioissa robotteja hyödynnetään. Kaikki robotit hyödyntävät automaatiota monipuolisesti ja ovat osa automaatiota.
ROBOTIIKKA M.Billing 2015 ROBOTIT Mikä on robotti Minkälaisia robotteja on käytössä Minkälaisissa asioissa robotteja hyödynnetään. Kaikki robotit hyödyntävät automaatiota monipuolisesti ja ovat osa automaatiota.
Standardisointikatsaus
 Standardisointikatsaus 4.6.2015 ISO/TC 199 Koneturvallisuus työryhmät WG 5 General principles for the design of machinery and risk assessment Suomen edustaja: Sari Kojo, Wärtsilä Finland Oy WG 6 Safety
Standardisointikatsaus 4.6.2015 ISO/TC 199 Koneturvallisuus työryhmät WG 5 General principles for the design of machinery and risk assessment Suomen edustaja: Sari Kojo, Wärtsilä Finland Oy WG 6 Safety
LTC 2605/91 -videonhallintalaite
 CCTV LTC 2605/91 -videonhallintalaite LTC 2605/91 -videonhallintalaite Keskitetty näyttöjen ja multiplekserien hallinta Ohjaa enintään 16 digitaalista Divar-videotallenninta tai System4-multiplekseriä
CCTV LTC 2605/91 -videonhallintalaite LTC 2605/91 -videonhallintalaite Keskitetty näyttöjen ja multiplekserien hallinta Ohjaa enintään 16 digitaalista Divar-videotallenninta tai System4-multiplekseriä
PAKKAUSROBOTTISOLUN SUUNNITTELU
 Jussi-Pekka Ojala PAKKAUSROBOTTISOLUN SUUNNITTELU Jurvan Jousi Oy Tekniikka 2016 VAASAN AMMATTIKORKEAKOULU Konetekniikka TIIVISTELMÄ Tekijä Jussi-Pekka Ojala Opinnäytetyön nimi Pakkausrobotti solun suunnittelu
Jussi-Pekka Ojala PAKKAUSROBOTTISOLUN SUUNNITTELU Jurvan Jousi Oy Tekniikka 2016 VAASAN AMMATTIKORKEAKOULU Konetekniikka TIIVISTELMÄ Tekijä Jussi-Pekka Ojala Opinnäytetyön nimi Pakkausrobotti solun suunnittelu
Palauta jokainen funktio-tiedosto. Esitä myös funktiot vastauspaperissasi.
 Tehtävä 1 Kirjoita neljä eri funktiota (1/2 pistettä/funktio): 1. Funktio T tra saa herätteenä 3x1-kokoisen paikkavektorin p. Se palauttaa 4x4 muunnosmatriisin, johon sijoitettu p:n koordinaattien mukainen
Tehtävä 1 Kirjoita neljä eri funktiota (1/2 pistettä/funktio): 1. Funktio T tra saa herätteenä 3x1-kokoisen paikkavektorin p. Se palauttaa 4x4 muunnosmatriisin, johon sijoitettu p:n koordinaattien mukainen
KUORMALAVAHYLLY ALFA
 KUORMALAVAHYLLY ALFA EAB KUORMALAVAHYLLY EAB:n kuormalavahylly kattaa vakiona laajan valikoiman eri levyisiä, syvyisiä ja korkuisia hyllyjä. Monipuolisilla lisävarusteilla rakennetaan tehokas ja toimiva
KUORMALAVAHYLLY ALFA EAB KUORMALAVAHYLLY EAB:n kuormalavahylly kattaa vakiona laajan valikoiman eri levyisiä, syvyisiä ja korkuisia hyllyjä. Monipuolisilla lisävarusteilla rakennetaan tehokas ja toimiva
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
ELEC-C1110 Automaatio- ja systeemitekniikan. Luento 11 Esimerkki automaation soveltamisesta
 ELEC-C1110 Automaatio- ja systeemitekniikan perusteet Luento 11 Esimerkki automaation soveltamisesta Tämän luennon aihe Esimerkki automaation soveltamisesta käytännössä: WorkPartner-palvelurobotti WorkPartner
ELEC-C1110 Automaatio- ja systeemitekniikan perusteet Luento 11 Esimerkki automaation soveltamisesta Tämän luennon aihe Esimerkki automaation soveltamisesta käytännössä: WorkPartner-palvelurobotti WorkPartner
Teollisuusautomaation standardit Osio 9
 Teollisuusautomaation standardit Osio 9 Osio 1: SESKOn Komitea SK 65: Teollisuusprosessien ohjaus Osio 2: Toiminnallinen turvallisuus: periaatteet Osio 3: Toiminnallinen turvallisuus: standardisarja IEC
Teollisuusautomaation standardit Osio 9 Osio 1: SESKOn Komitea SK 65: Teollisuusprosessien ohjaus Osio 2: Toiminnallinen turvallisuus: periaatteet Osio 3: Toiminnallinen turvallisuus: standardisarja IEC
Metropolia Engagement Day IHMINEN JA ROBOTIIKKA (European Robotics Week 2017)
") Järjestäjät: Suomen Robotiikkayhdistys ry, Metropolia Ammattikorkeakoulu, Vantaan kaupunki Tapahtuma on osa European Robotics Week 2017 -tapahtumaa. Tilaisuus on maksuton. Avoin kaikille teemasta ja aiheesta
Järjestäjät: Suomen Robotiikkayhdistys ry, Metropolia Ammattikorkeakoulu, Vantaan kaupunki Tapahtuma on osa European Robotics Week 2017 -tapahtumaa. Tilaisuus on maksuton. Avoin kaikille teemasta ja aiheesta
1. TEKNISET TIEDOT 2. LED-TOIMINNOT JA SÄÄDÖT
 KÄYTTÖOHJE LITHOS SISÄLLYSLUETTELO: 1. TEKNISET TIEDOT...3 2. LED-TOIMINNOT JA SÄÄDÖT...3 3. OVIPANEELIEN OHJELMOINTI VAS/01 KANSSA...4 3.1 Kytkentäesimerkkejä...4 3.2 Liitinrima...4 3.3 Ovipaneelin manuaalinen
KÄYTTÖOHJE LITHOS SISÄLLYSLUETTELO: 1. TEKNISET TIEDOT...3 2. LED-TOIMINNOT JA SÄÄDÖT...3 3. OVIPANEELIEN OHJELMOINTI VAS/01 KANSSA...4 3.1 Kytkentäesimerkkejä...4 3.2 Liitinrima...4 3.3 Ovipaneelin manuaalinen
A11-02 Infrapunasuodinautomatiikka kameralle
 A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
Robottialustan instrumentointi ja käyttöönotto
 Niilo Heinonen Hannu Häyrinen Matias Katajamäki Tuomas Pylvänen Robottialustan instrumentointi ja käyttöönotto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt 1. Projektin tavoite Projektin puitteissa
Niilo Heinonen Hannu Häyrinen Matias Katajamäki Tuomas Pylvänen Robottialustan instrumentointi ja käyttöönotto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt 1. Projektin tavoite Projektin puitteissa
Futura kuivaimen edut takaavat patentoidut tekniset ratkaisut
 Kuivain Futura Kuivain Futura Eurooppalainen patentti EP nro. 1029211 19 patenttia todistavat laitteen teknisten ratkaisujen omaperäisyyden pistettä ja teknisten ratkaisujen Futura, kansainväliset innovatiivisuuspalkinnot
Kuivain Futura Kuivain Futura Eurooppalainen patentti EP nro. 1029211 19 patenttia todistavat laitteen teknisten ratkaisujen omaperäisyyden pistettä ja teknisten ratkaisujen Futura, kansainväliset innovatiivisuuspalkinnot
Kokoonpanorobotisointi konepaja- teollisuudessa Assembly robotics in industry
 Lappeenrannan teknillinen yliopisto Teknillinen tiedekunta Konetekniikan koulutusohjelma BK10A0400 Kandidaatintyö Kokoonpanorobotisointi konepaja- teollisuudessa Assembly robotics in industry Työn tarkastaja
Lappeenrannan teknillinen yliopisto Teknillinen tiedekunta Konetekniikan koulutusohjelma BK10A0400 Kandidaatintyö Kokoonpanorobotisointi konepaja- teollisuudessa Assembly robotics in industry Työn tarkastaja
Robottien etäohjelmointi
 Aalto-yliopisto Insinööritieteiden korkeakoulu Tuotantoautomaatio Kon-15.4119 Robottien etäohjelmointi Harjoitustyö 21.10.2015 Janica Aula Sakari Ilvesniemi Karri Vehviläinen Ville Paakkunainen Sisällysluettelo
Aalto-yliopisto Insinööritieteiden korkeakoulu Tuotantoautomaatio Kon-15.4119 Robottien etäohjelmointi Harjoitustyö 21.10.2015 Janica Aula Sakari Ilvesniemi Karri Vehviläinen Ville Paakkunainen Sisällysluettelo
Tuotepakkauksen tarkastus teollisuusrobotilla
 Tuotepakkauksen tarkastus teollisuusrobotilla ja konenäöllä Joel Keski-Kuha Opinnäytetyö Marraskuu 2016 Tekniikan ja liikenteen ala Insinööri (AMK), Automaatiotekniikan tutkinto-ohjelma Kuvailulehti Tekijä(t)
Tuotepakkauksen tarkastus teollisuusrobotilla ja konenäöllä Joel Keski-Kuha Opinnäytetyö Marraskuu 2016 Tekniikan ja liikenteen ala Insinööri (AMK), Automaatiotekniikan tutkinto-ohjelma Kuvailulehti Tekijä(t)
JARNO ARKKO TEOLLISUUSROBOTIIKKA AMK OPETUKSESSA; TYÖELÄMÄN VAATIMUKSET. Diplomityö
 JARNO ARKKO TEOLLISUUSROBOTIIKKA AMK OPETUKSESSA; TYÖELÄMÄN VAATIMUKSET Diplomityö Tarkastaja: professori Minna Lanz Tarkastaja ja aihe hyväksytty Teknisten tieteiden tiedekuntaneuvoston kokouksessa 5.
JARNO ARKKO TEOLLISUUSROBOTIIKKA AMK OPETUKSESSA; TYÖELÄMÄN VAATIMUKSET Diplomityö Tarkastaja: professori Minna Lanz Tarkastaja ja aihe hyväksytty Teknisten tieteiden tiedekuntaneuvoston kokouksessa 5.
ROBOTISOIDUN HIONNAN SUORITUSKYKYANALYYSI VAATIVAN GEOMETRIAN VIIMEISTELYSSÄ
 LUT-YLIOPISTO LUT School of Energy Systems LUT Kone Juhani Nordström ROBOTISOIDUN HIONNAN SUORITUSKYKYANALYYSI VAATIVAN GEOMETRIAN VIIMEISTELYSSÄ Tarkastajat: Professori Harri Eskelinen Professori Juha
LUT-YLIOPISTO LUT School of Energy Systems LUT Kone Juhani Nordström ROBOTISOIDUN HIONNAN SUORITUSKYKYANALYYSI VAATIVAN GEOMETRIAN VIIMEISTELYSSÄ Tarkastajat: Professori Harri Eskelinen Professori Juha
Kolmipisteohjauksen toimimoottorit
 Tekninen esite Kolmipisteohjauksen toimimoottorit AMV 10, AMV 20, AMV 30 AMV 13, AMV 23, AMV 33 - DIN EN 14597 sertifioitu turvatoiminto (jousi alas) Kuvaus AMV 10 AMV 13 AMV 20, AMV 30 AMV 23, AMV 33
Tekninen esite Kolmipisteohjauksen toimimoottorit AMV 10, AMV 20, AMV 30 AMV 13, AMV 23, AMV 33 - DIN EN 14597 sertifioitu turvatoiminto (jousi alas) Kuvaus AMV 10 AMV 13 AMV 20, AMV 30 AMV 23, AMV 33
MACCO BF Haarukkavaunu KÄYTTÖOHJEET. Oy Machine Tool Co
 MACCO BF Haarukkavaunu KÄYTTÖOHJEET Oy Machine Tool Co 1. Käyttökohteet Käsikäyttöinen MACCO BF -haarukkavaunu on matalarakenteinen, vain kuormalavalla olevan, kovilla pinnoilla liikuteltavan tavaran siirtelyyn
MACCO BF Haarukkavaunu KÄYTTÖOHJEET Oy Machine Tool Co 1. Käyttökohteet Käsikäyttöinen MACCO BF -haarukkavaunu on matalarakenteinen, vain kuormalavalla olevan, kovilla pinnoilla liikuteltavan tavaran siirtelyyn
VIRTUAALISTEN ROBOTTISOLUJEN KEHITYS
 Opinnäytetyö (AMK) Kone- ja tuotantotekniikka Koneautomaatio 2016 Otto Kurkijärvi VIRTUAALISTEN ROBOTTISOLUJEN KEHITYS OPINNÄYTETYÖ (AMK) TIIVISTELMÄ TURUN AMMATTIKORKEAKOULU Kone- ja tuotantotekniikka
Opinnäytetyö (AMK) Kone- ja tuotantotekniikka Koneautomaatio 2016 Otto Kurkijärvi VIRTUAALISTEN ROBOTTISOLUJEN KEHITYS OPINNÄYTETYÖ (AMK) TIIVISTELMÄ TURUN AMMATTIKORKEAKOULU Kone- ja tuotantotekniikka
UUDEN ROBOTTISOLUN OHJELMOINTITAVAN MAHDOLLISUUDET PIENILLE JA KESKISUURILLE YRITYKSILLE
 Lappeenrannan teknillinen yliopisto Teknillinen tiedekunta Konetekniikan koulutusohjelma Esko Pekkanen UUDEN ROBOTTISOLUN OHJELMOINTITAVAN MAHDOLLISUUDET PIENILLE JA KESKISUURILLE YRITYKSILLE Tarkastajat
Lappeenrannan teknillinen yliopisto Teknillinen tiedekunta Konetekniikan koulutusohjelma Esko Pekkanen UUDEN ROBOTTISOLUN OHJELMOINTITAVAN MAHDOLLISUUDET PIENILLE JA KESKISUURILLE YRITYKSILLE Tarkastajat
We move everything. Tekniikan Trendit 2016
 We move everything 1 Monta teknologiaa. Yksi ratkaisu. 2 Hydrauliikka Koneikot Pumput Perusventtiilit Säätöventtiilit Venttiiliryhmät Venttiiliohjaimet Akseliohjaimet Sylinterit Nopeakäyntiset moottorit
We move everything 1 Monta teknologiaa. Yksi ratkaisu. 2 Hydrauliikka Koneikot Pumput Perusventtiilit Säätöventtiilit Venttiiliryhmät Venttiiliohjaimet Akseliohjaimet Sylinterit Nopeakäyntiset moottorit
Millainen on menestyvä digitaalinen palvelu?
 Millainen on menestyvä digitaalinen palvelu? TOIMIVA ÄLYKÄS ILAHDUTTAVA Ohjelmistokehitys Testaus ja laadunvarmistus Ohjelmistorobotiikka Tekoäly Käyttöliittymäsuunnittelu Käyttäjäkokemussuunnittelu 1
Millainen on menestyvä digitaalinen palvelu? TOIMIVA ÄLYKÄS ILAHDUTTAVA Ohjelmistokehitys Testaus ja laadunvarmistus Ohjelmistorobotiikka Tekoäly Käyttöliittymäsuunnittelu Käyttäjäkokemussuunnittelu 1
Suurempi Kapasiteetti: VM-30/35 isoilla poikkiliikkeellä optimoitu suorituskyky isoihin kappaleisiin.
 Pystykarainen koneistuskeskus DIGIMA BM VM 35 Suurempi Kapasiteetti: VM-30/35 isoilla poikkiliikkeellä optimoitu suorituskyky isoihin kappaleisiin. VM-30/35 on paras valinta isoille ja raskaille muoteille.
Pystykarainen koneistuskeskus DIGIMA BM VM 35 Suurempi Kapasiteetti: VM-30/35 isoilla poikkiliikkeellä optimoitu suorituskyky isoihin kappaleisiin. VM-30/35 on paras valinta isoille ja raskaille muoteille.
KESKEISET NC-KOODIT TOIMINNAN MUKAAN RYHMITELLEN
 KESKEISET NC-KOODIT TOIMINNAN MUKAAN RYHMITELLEN Tämän dokumentin lopussa on teollisuudessa hyvin yleisen Fanucohjauksen NC-koodia oppilaitoksen laboratoriossa olevalle kolmiakseliselle Robodrill-työstökoneelle.
KESKEISET NC-KOODIT TOIMINNAN MUKAAN RYHMITELLEN Tämän dokumentin lopussa on teollisuudessa hyvin yleisen Fanucohjauksen NC-koodia oppilaitoksen laboratoriossa olevalle kolmiakseliselle Robodrill-työstökoneelle.
Istukkaventtiilit (PN 16) VS 2 2-tieventtiili, ulkokierre
 VS 2 2-tieventtiili, ulkokierre") Tekninen esite Istukkaventtiilit (PN 16) VS 2 2-tieventtiili, ulkokierre Kuvaus Ominaisuudet: Jaettu ominaiskäyrä kehitetty vaativimpiin sovelluksiin (DN 20 ja DN 25) Useita k VS -arvoja Painantaliitännän
Tekninen esite Istukkaventtiilit (PN 16) VS 2 2-tieventtiili, ulkokierre Kuvaus Ominaisuudet: Jaettu ominaiskäyrä kehitetty vaativimpiin sovelluksiin (DN 20 ja DN 25) Useita k VS -arvoja Painantaliitännän
Antti Heikkilä HIONTATYÖVAIHEEN AUTOMATISOINTI TUOTANNOSSA
 Antti Heikkilä HIONTATYÖVAIHEEN AUTOMATISOINTI TUOTANNOSSA HIONTATYÖVAIHEEN AUTOMATISOINTI TUOTANNOSSA Antti Heikkilä Opinnäytetyö Kevät 2017 Kone- ja tuotantotekniikka Oulun ammattikorkeakoulu TIIVISTELMÄ
Antti Heikkilä HIONTATYÖVAIHEEN AUTOMATISOINTI TUOTANNOSSA HIONTATYÖVAIHEEN AUTOMATISOINTI TUOTANNOSSA Antti Heikkilä Opinnäytetyö Kevät 2017 Kone- ja tuotantotekniikka Oulun ammattikorkeakoulu TIIVISTELMÄ
RumbleTools Oy. Imatralainen korkean teknologian yritys Ydinosaamisemme on prosessien automatisointi robotiikan ja ohjelmistokehityksen avulla
 RumbleTools Oy Imatralainen korkean teknologian yritys Ydinosaamisemme on prosessien automatisointi robotiikan ja ohjelmistokehityksen avulla Perustettu: 2016 Rahoittajina: Pääomistaja Arto Koivuharju,
RumbleTools Oy Imatralainen korkean teknologian yritys Ydinosaamisemme on prosessien automatisointi robotiikan ja ohjelmistokehityksen avulla Perustettu: 2016 Rahoittajina: Pääomistaja Arto Koivuharju,
FAMOS PROTEC. Edistykselliset. Kuumasaumaajat
 Edistykselliset FAMOS PROTEC Kuumasaumaajat Hygieenistä muotoilua yhdistettynä nykyaikaisen välinehuollon toiminnalliset vaatimukset täyttäviin teknisiin ominaisuuksiin! F108 PROTEC F108 T PROTEC F108
Edistykselliset FAMOS PROTEC Kuumasaumaajat Hygieenistä muotoilua yhdistettynä nykyaikaisen välinehuollon toiminnalliset vaatimukset täyttäviin teknisiin ominaisuuksiin! F108 PROTEC F108 T PROTEC F108
Täydellinen valvonta. Jäähdytysjärjestelmän on siten kyettävä kommunikoimaan erilaisten ohjausjärjestelmien kanssa.
 Täydellinen valvonta ATK-konesalit ovat monimutkaisia ympäristöjä: Tarjoamalla täydellisiä integroiduista elementeistä koostuvia ratkaisuja taataan yhteensopivuus ja strateginen säätöjärjestelmän integrointi.
Täydellinen valvonta ATK-konesalit ovat monimutkaisia ympäristöjä: Tarjoamalla täydellisiä integroiduista elementeistä koostuvia ratkaisuja taataan yhteensopivuus ja strateginen säätöjärjestelmän integrointi.
Algoritmit. Ohjelman tekemisen hahmottamisessa käytetään
 Ohjelmointi Ohjelmoinnissa koneelle annetaan tarkkoja käskyjä siitä, mitä koneen tulisi tehdä. Ohjelmointikieliä on olemassa useita satoja. Ohjelmoinnissa on oleellista asioiden hyvä suunnittelu etukäteen.
Ohjelmointi Ohjelmoinnissa koneelle annetaan tarkkoja käskyjä siitä, mitä koneen tulisi tehdä. Ohjelmointikieliä on olemassa useita satoja. Ohjelmoinnissa on oleellista asioiden hyvä suunnittelu etukäteen.
SISÄÄNRAKENNETTU TURVALLISUUS- JÄRJESTELMÄ CE-HYVÄKSYTTY PIENI JA ÄLYKÄS ... CALL ME COWELDER 1 YHTEISTYÖHITSAUSROBOTTI
 SISÄÄNRAKENNETTU TURVALLISUUS- JÄRJESTELMÄ CE-HYVÄKSYTTY PIENI JA ÄLYKÄS CALL ME COWELDER 1 YHTEISTYÖHITSAUSROBOTTI SISÄLTÖ Uusi hitsausapulainen 3 Hitsauskoneiden tekniset tiedot 4 Tekniset tiedot, UR5
SISÄÄNRAKENNETTU TURVALLISUUS- JÄRJESTELMÄ CE-HYVÄKSYTTY PIENI JA ÄLYKÄS CALL ME COWELDER 1 YHTEISTYÖHITSAUSROBOTTI SISÄLTÖ Uusi hitsausapulainen 3 Hitsauskoneiden tekniset tiedot 4 Tekniset tiedot, UR5
LAURI POIKOLAINEN YHTEISTYÖROBOTIIKAN OPPIMISSOLU
 LAURI POIKOLAINEN YHTEISTYÖROBOTIIKAN OPPIMISSOLU Kandidaatintyö Tarkastaja: projektipäällikkö Jyrki Latokartano i TIIVISTELMÄ Lauri Poikolainen: Yhteistyörobotiikan oppimissolu Tampereen teknillinen yliopisto
LAURI POIKOLAINEN YHTEISTYÖROBOTIIKAN OPPIMISSOLU Kandidaatintyö Tarkastaja: projektipäällikkö Jyrki Latokartano i TIIVISTELMÄ Lauri Poikolainen: Yhteistyörobotiikan oppimissolu Tampereen teknillinen yliopisto
UV - Tasotulostin ratkaisut
 UV - Tasotulostin ratkaisut Koskueentie 7, 19700 Sysmä harri.hynynen@printmedia.fi Puh. 0440-875 020 www.printmedia.fi Docan tulostimet yleisesti: - Viimeistellyt Docan tulostimet omaavat luotettavan toiminnan
UV - Tasotulostin ratkaisut Koskueentie 7, 19700 Sysmä harri.hynynen@printmedia.fi Puh. 0440-875 020 www.printmedia.fi Docan tulostimet yleisesti: - Viimeistellyt Docan tulostimet omaavat luotettavan toiminnan
ROBOTIN LAVAUSSOLU. LAHDEN AMMATTIKORKEAKOULU Tekniikan ala Kone- ja tuotantotekniikka Mekatroniikka Opinnäytetyö Kevät 2018 Vesa Utela
 ROBOTIN LAVAUSSOLU LAHDEN AMMATTIKORKEAKOULU Tekniikan ala Kone- ja tuotantotekniikka Mekatroniikka Opinnäytetyö Kevät 2018 Vesa Utela Lahden ammattikorkeakoulu Kone- ja tuotantotekniikan koulutusohjelma
ROBOTIN LAVAUSSOLU LAHDEN AMMATTIKORKEAKOULU Tekniikan ala Kone- ja tuotantotekniikka Mekatroniikka Opinnäytetyö Kevät 2018 Vesa Utela Lahden ammattikorkeakoulu Kone- ja tuotantotekniikan koulutusohjelma
Työstökoneliike M. Koskela Oy Jänismaantie 28 67800 Kokkola FINLAND. MVD inan ibend A Särmäyspuristin
 Työstökoneliike M. Koskela Oy Konya Organize Sanayi Bölgesi Evrenköy Cad. 1 Nolu Sokak No: 3 42050 Konya / Türkiye MVD inan ibend A Särmäyspuristin +90 332 239 21 21 37 58 59 N, 32 36 34 E www.mvd.com.tr
Työstökoneliike M. Koskela Oy Konya Organize Sanayi Bölgesi Evrenköy Cad. 1 Nolu Sokak No: 3 42050 Konya / Türkiye MVD inan ibend A Särmäyspuristin +90 332 239 21 21 37 58 59 N, 32 36 34 E www.mvd.com.tr
Koodaamme uutta todellisuutta FM Maarit Savolainen https://blog.edu.turku.fi/matikkaajakoodausta/
 Koodaamme uutta todellisuutta FM Maarit Savolainen 19.1.2017 https://blog.edu.turku.fi/matikkaajakoodausta/ Mitä on koodaaminen? Koodaus on puhetta tietokoneille. Koodaus on käskyjen antamista tietokoneelle.
Koodaamme uutta todellisuutta FM Maarit Savolainen 19.1.2017 https://blog.edu.turku.fi/matikkaajakoodausta/ Mitä on koodaaminen? Koodaus on puhetta tietokoneille. Koodaus on käskyjen antamista tietokoneelle.
TYÖKOORDINAATISTON MÄÄRITTELY MITSUI SEIKI HR5B -KONEISTUS- KESKUKSELLA
 TYÖKOORDINAATISTON MÄÄRITTELY MITSUI SEIKI HR5B -KONEISTUS- KESKUKSELLA Tässä ohjeessa on esitetty, miten työkoordinaatisto määritellään Mitsui Seiki -koneistuskeskuksessa. Määrittely tapahtuu siten, että
TYÖKOORDINAATISTON MÄÄRITTELY MITSUI SEIKI HR5B -KONEISTUS- KESKUKSELLA Tässä ohjeessa on esitetty, miten työkoordinaatisto määritellään Mitsui Seiki -koneistuskeskuksessa. Määrittely tapahtuu siten, että
ROBOTIIKKA SISÄLLYSLUETTELO:
 ROBOTIIKKA SISÄLLYSLUETTELO: 1. JOHDANTO JA HISTORIAA...2 2. ROBOTTITYYPIT JA RAKENTEET...5 2.1 Yleistä... 5 2.2 Robottityypit ja rakenteet... 1 2.2.1 Suorakulmaiset robotit... 1 2.2.2 Scara - robotit...
ROBOTIIKKA SISÄLLYSLUETTELO: 1. JOHDANTO JA HISTORIAA...2 2. ROBOTTITYYPIT JA RAKENTEET...5 2.1 Yleistä... 5 2.2 Robottityypit ja rakenteet... 1 2.2.1 Suorakulmaiset robotit... 1 2.2.2 Scara - robotit...
- Käyttäjä voi valita halutun sisääntulon signaalin asetusvalikosta (esim. 0 5V, 0 10 V tai 4 20 ma)
") LE PSX DIN kisko kiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 3 numeron LED näyttö - Selkeä rakenne, yksinkertainen käyttää
LE PSX DIN kisko kiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 3 numeron LED näyttö - Selkeä rakenne, yksinkertainen käyttää
Siirtohyllystöt renkaiden ja rengassarjojen varastointiin Optimaalinen säilytyskapasiteetti ja turvallinen käsittely
 Siirtohyllystöt renkaiden ja rengassarjojen varastointiin Optimaalinen säilytyskapasiteetti ja turvallinen käsittely Tehokasta tilankäyttöä ja tehokkuutta Renkaiden ja rengassarjojen optimaalinen säilytys
Siirtohyllystöt renkaiden ja rengassarjojen varastointiin Optimaalinen säilytyskapasiteetti ja turvallinen käsittely Tehokasta tilankäyttöä ja tehokkuutta Renkaiden ja rengassarjojen optimaalinen säilytys
RÖNTGENDIFFRAKTIOROBOTTIEN TARKKUUSMITTAUKSET
 RÖNTGENDIFFRAKTIOROBOTTIEN TARKKUUSMITTAUKSET Sauli Lappalainen Opinnäytetyö Helmikuu 2016 Kone- ja tuotantotekniikka Kone- ja laiteautomaatio TIIVISTELMÄ Tampereen ammattikorkeakoulu Kone- ja tuotantotekniikka
RÖNTGENDIFFRAKTIOROBOTTIEN TARKKUUSMITTAUKSET Sauli Lappalainen Opinnäytetyö Helmikuu 2016 Kone- ja tuotantotekniikka Kone- ja laiteautomaatio TIIVISTELMÄ Tampereen ammattikorkeakoulu Kone- ja tuotantotekniikka
Satelliittipaikannus
 Kolme maailmalaajuista järjestelmää 1. GPS (USAn puolustusministeriö) Täydessä laajuudessaan toiminnassa v. 1994. http://www.navcen.uscg.gov/gps/default.htm 2. GLONASS (Venäjän hallitus) Ilmeisesti 11
Kolme maailmalaajuista järjestelmää 1. GPS (USAn puolustusministeriö) Täydessä laajuudessaan toiminnassa v. 1994. http://www.navcen.uscg.gov/gps/default.htm 2. GLONASS (Venäjän hallitus) Ilmeisesti 11
DIGITALISAATIO LOUHINNAN DIGITALISAATIO KIVIAINESTUOTANNOSSA Digitaalisen tietotekniikan yleistyminen arkielämän toiminnoissa [Wikipedia]
![DIGITALISAATIO LOUHINNAN DIGITALISAATIO KIVIAINESTUOTANNOSSA Digitaalisen tietotekniikan yleistyminen arkielämän toiminnoissa [Wikipedia]](/thumbs/92/107955133.jpg "DIGITALISAATIO LOUHINNAN DIGITALISAATIO KIVIAINESTUOTANNOSSA Digitaalisen tietotekniikan yleistyminen arkielämän toiminnoissa [Wikipedia]") LOUHINNAN DIGITALISAATIO KIVIAINESTUOTANNOSSA Kiviaines- ja murskauspäivät 19.1.2018 Tuomo Pirinen Sandvik Mining and Rock Technology tuomo.pirinen@sandvik.com DIGITALISAATIO Digitaalisen tietotekniikan
LOUHINNAN DIGITALISAATIO KIVIAINESTUOTANNOSSA Kiviaines- ja murskauspäivät 19.1.2018 Tuomo Pirinen Sandvik Mining and Rock Technology tuomo.pirinen@sandvik.com DIGITALISAATIO Digitaalisen tietotekniikan
TUNTOREUNAT. Kuvaus. Ominaisuudet ja edut
 TUNTOREUNAT Kuvaus Tapeswitch tuntoreunat on kosketukseen perustuvia turvaantureita jotka on suunniteltu suojaamaan henkilöitä ja laitteita erilaisissa ympäristöissä. Tapeswitch tuntoreunojen toiminta
TUNTOREUNAT Kuvaus Tapeswitch tuntoreunat on kosketukseen perustuvia turvaantureita jotka on suunniteltu suojaamaan henkilöitä ja laitteita erilaisissa ympäristöissä. Tapeswitch tuntoreunojen toiminta
KÄYTTÖOHJE INVANOSTIN LIFTMAN 400
 KÄYTTÖOHJE INVANOSTIN LIFTMAN 400 Laitteen osat 1. Kädensija 2. Päänostotaso 3. Nostotaso 4. Sähköyksikkö jossa päävirtakatkaisija 5. Kiinnityselementti 6. Sähkösylinteri 7. Sisäänajoluiska 8. Sisäänajoluiskanohjaus
KÄYTTÖOHJE INVANOSTIN LIFTMAN 400 Laitteen osat 1. Kädensija 2. Päänostotaso 3. Nostotaso 4. Sähköyksikkö jossa päävirtakatkaisija 5. Kiinnityselementti 6. Sähkösylinteri 7. Sisäänajoluiska 8. Sisäänajoluiskanohjaus
MIKAEL BILLING OPPIMISYMPÄRISTÖ ROBOTIIKAN JA ETÄOHJELMOINNIN OPETUKSEEN. Diplomityö
 MIKAEL BILLING OPPIMISYMPÄRISTÖ ROBOTIIKAN JA ETÄOHJELMOINNIN OPETUKSEEN Diplomityö Tarkastaja: professori Reijo Tuokko Tarkastaja ja aihe hyväksytty automaatio-, kone- ja materiaalitekniikan tiedekuntaneuvoston
MIKAEL BILLING OPPIMISYMPÄRISTÖ ROBOTIIKAN JA ETÄOHJELMOINNIN OPETUKSEEN Diplomityö Tarkastaja: professori Reijo Tuokko Tarkastaja ja aihe hyväksytty automaatio-, kone- ja materiaalitekniikan tiedekuntaneuvoston
OUM6410C4037 3-pisteohjattu venttiilimoottori 24 VAC
 OUM6410C4037 3-pisteohjattu venttiilimoottori 24 VAC TUOTETIEDOT YLEISTÄ OUM6410C venttiilimoottori soveltuu hitaiden säätöprosessien ohjaamiseen, esim. lämmityspiirien säätöön. Venttiilimoottori ei tarvitse
OUM6410C4037 3-pisteohjattu venttiilimoottori 24 VAC TUOTETIEDOT YLEISTÄ OUM6410C venttiilimoottori soveltuu hitaiden säätöprosessien ohjaamiseen, esim. lämmityspiirien säätöön. Venttiilimoottori ei tarvitse
Rockfon System G Direct
 Part of the ROCKWOOL Group Järjestelmän kuvaus G-Reunamuoto -- Suoraan asennettava järjestelmä -- Nopea ja tehokas asennusprosessi -- Oikea valinta mataliin huoneisiin -- Tyylikäs ja yhtenäinen ilme alakattoon
Part of the ROCKWOOL Group Järjestelmän kuvaus G-Reunamuoto -- Suoraan asennettava järjestelmä -- Nopea ja tehokas asennusprosessi -- Oikea valinta mataliin huoneisiin -- Tyylikäs ja yhtenäinen ilme alakattoon
Juha Harju. Konenäkö-opetussovellus. Opinnäytetyö Kevät 2012 Tekniikan yksikkö Tietotekniikan koulutusohjelma Mekatroniikan suuntautumisvaihtoehto
 1 Juha Harju Konenäkö-opetussovellus Opinnäytetyö Kevät 2012 Tekniikan yksikkö Tietotekniikan koulutusohjelma Mekatroniikan suuntautumisvaihtoehto 2 SEINÄJOEN AMMATTIKORKEAKOULU OPINNÄYTETYÖN TIIVISTELMÄ
1 Juha Harju Konenäkö-opetussovellus Opinnäytetyö Kevät 2012 Tekniikan yksikkö Tietotekniikan koulutusohjelma Mekatroniikan suuntautumisvaihtoehto 2 SEINÄJOEN AMMATTIKORKEAKOULU OPINNÄYTETYÖN TIIVISTELMÄ
MILTON ROY - ANNOSTUSPUMPUT
 Mekaanisesti toimiva kalvo Sähkömagneettiset LMI ROYTRONIC -sarjan pumput Maksimaalinen muunneltavuus: Uusi annostuspään rakenne - FastPrime & AutoPrime; nopea ja helppo pumpun käyttöönotto Tarkempi kemikaalien
Mekaanisesti toimiva kalvo Sähkömagneettiset LMI ROYTRONIC -sarjan pumput Maksimaalinen muunneltavuus: Uusi annostuspään rakenne - FastPrime & AutoPrime; nopea ja helppo pumpun käyttöönotto Tarkempi kemikaalien
Co-Automation on alansa edelläkävijä automaation ja robotiikan hyödyntämisessä valmistavan teollisuuden automaatioratkaisuissa.
 Co-Automation on alansa edelläkävijä automaation ja robotiikan hyödyntämisessä valmistavan teollisuuden automaatioratkaisuissa. Haemme nyt kasvun vauhdittamiseksi lisää kokeneita ammattilaisia. Työpaikkasi
Co-Automation on alansa edelläkävijä automaation ja robotiikan hyödyntämisessä valmistavan teollisuuden automaatioratkaisuissa. Haemme nyt kasvun vauhdittamiseksi lisää kokeneita ammattilaisia. Työpaikkasi
Teollisuusautomaation standardit. Osio 2:
 Teollisuusautomaation standardit Osio 2 Osio 1: SESKOn komitea SK 65: Teollisuusprosessien ohjaus Osio 2: Toiminnallinen turvallisuus: periaatteet Osio 3: Toiminnallinen turvallisuus: standardisarja IEC
Teollisuusautomaation standardit Osio 2 Osio 1: SESKOn komitea SK 65: Teollisuusprosessien ohjaus Osio 2: Toiminnallinen turvallisuus: periaatteet Osio 3: Toiminnallinen turvallisuus: standardisarja IEC
Mitä vanhan laitteen modernisoinnissa kannattaa huomioida? Kiwa Inspecta Katri Tytykoski
 [presentation title] via >Insert >Header & Footer KONEEN JATKOAIKA Mitä vanhan laitteen modernisoinnissa kannattaa huomioida? Kiwa Inspecta Katri Tytykoski Johtava asiantuntija Inspecta Tarkastus Oy Koneen
[presentation title] via >Insert >Header & Footer KONEEN JATKOAIKA Mitä vanhan laitteen modernisoinnissa kannattaa huomioida? Kiwa Inspecta Katri Tytykoski Johtava asiantuntija Inspecta Tarkastus Oy Koneen
MILTON ROY -ANNOSTUSPUMPUT
 MILTON ROY -ANNOSTUSPUMPUT MILTON ROY MEKAANISET KALVOPUMPUT SÄHKÖMAGNEETTINEN LMI-SARJA sähkömagneettiset kalvoannostelupumput monipuoliseen ja tarkkaan kemikaalien annosteluun kapasiteettialue 1 ml/h
MILTON ROY -ANNOSTUSPUMPUT MILTON ROY MEKAANISET KALVOPUMPUT SÄHKÖMAGNEETTINEN LMI-SARJA sähkömagneettiset kalvoannostelupumput monipuoliseen ja tarkkaan kemikaalien annosteluun kapasiteettialue 1 ml/h