Hammastankohissin modernisointi
|
|
|
- Marjut Pääkkönen
- 9 vuotta sitten
- Katselukertoja:
Transkriptio
1 Hammastankohissin modernisointi Automaatio- ja systeemitekniikan projektityöt Heikki Laitasalmi

2 Sisällysluettelo Työn tavoite... 2 Suunnitelma... 2 Modernisoitavan hissin kuvaus... 3 Modernisoidun ohjausjärjestelmän rakenne... 6 Modernisoinnissa käytettävät komponentit... 7 Käytettävät kehitysympäristöt... 8 V-Malli Vaatimusmäärittely Järjestelmätoimintojen määrittely Ohjelmistotoiminnot Detaalisuunnittelu Toteutus Yksikkötestaus Tulosten arviointi Ajankäyttö Viitteet Liite 1 Hissin käyttötapaukset Liite 2 Hissin vaaran arviointi Liite 3 Esimerkkejä hissin järjestelmätoimintojen määrittely Liite 4 Esimerkkejä hissin ohjelmistotoiminnoista Liite 5 Esimerkkejä hissin ohjelmistotoimintojen toteutuksesta Liite 6 Esimerkki yksikkötestauksesta Liite 7 Matlabilla toteutettu modbus simulaattori... 50

3 Työn tavoite Työn tavoitteena on modernisoida kiinteästi asennetun seitsemänkerroksinen hammastankohissin sähkömekaaninen ohjausjärjestelmä, käyttäen hyväksi havaittua arkkitehtuuri ratkaisua ja siihen soveltuvia komponentteja. Arkkitehtuuri valinta tulee pohjautumaan hammastankohissin ohjausarkkitehtuurit - kandidaatintyön selvitykseen hissien ohjausarkkitehtuureista. Työ jakautuu kahteen osaan, joista ensimmäinen on komponenttien hankkiminen ja valitseminen ja toinen on ohjausjärjestelmän toteuttaminen. Työ pyritään suorittamaan mahdollisimman pitkälle käyttäen koneenohjausjärjestelmien V- mallia. Kevään tavoitteeksi on asetettu integraatiotestauksen valmiiksi saaminen, mikäli työt etenevät kuitenkin odotettua nopeammin pyritään testauksessa etenemään mahdollisimman pitkälle. Suunnitelma V-mallin mukaisesti aloitetaan työ vaatimusmäärittelyllä, jonka pohjana toimivat käyttötapaukset. Tämän jälkeen edetään järjestelmä toimintojen määrittelyyn, jonka kanssa tehdään osittain samanaikaisesti ohjelmisto toimintojen määrittelyä. Kun suunnittelu on saatu valmiiksi, arkkitehtuuriset ratkaisut on toivottavasti saatu valittua, joten aletaan pohtia miten kyseiset ohjelmistotoiminnot toteutetaan valitulla arkkitehtuurilla. Kun pohtimiset on pohdittu, aletaan toteuttaa suunnitelmia. Tämän jälkeen tehdään lopulliset testaussuunnitelmat ja toteutetaan testit. Aikataulu Taulukko 1.Suunniteltu aikataulu. Viikko 3 Viikko 4 Viikko 5 Viikko 6 Viikot 7-8 Viikko 9 Viikot Viikot Projektisuunnitelma, aletaan pohtia käyttötapauksia Käyttötapausten pohtiminen valmiiksi Toimintojen määrittely alkaa Toimintojen määrittely jatkuu, ohjelmistotoimintojen suunnittelu alkaa Määrittelyvaiheet jatkuvat Arkkitehtuuri on valittu, yksityiskohdat kuntoon Toteutetaan ohjelmistotoiminnot Lopullinen testaussuunnittelu ja testit Riskit Työn suurin riski liittyy alussa tehtäviin määrittelyihin. Ne pitäisi pystyä tekemään mahdollisimman kattavasti ja nopeasti, mitkä ovat toisensa pois sulkevia tekijöitä. Kummassakin tapauksessa vaikutukset ovat projektiaikatauluun välittömät. Mikäli määrittelyjä ei tehdä tarpeellisella tarkkuudella, kuluu muihin työvaiheisiin enemmän aikaa ja määrittelyihin kulunut aika on muista työvaiheista pois. Arkkitehtuuri valinnan myöhästyminen on toinen uhka. Sen myöhästyminen voi pahimmillaan pilata koko projektin, koska silloin tarpeellisia työkaluja ei saada tilattua ajoissa. Tähän täytyy kiinnittää erityistä huomiota, koska laitteiden ja ohjelmistojen saatavuus heti ei ole itsestään selvyys.

4 Modernisoitavan hissin kuvaus Hissin ohjausjärjestelmä on täysin sähköinen. Esimerkiksi kerrostunnistus tapahtuu siten, että hissiin kiinnitetty ratas pyörittää ketjua, joka pyörittää toista ratasta, johon on kiinnitetty kahteen suuntaan liipaisevia rajakytkimiä. Hissi tunnistaa kerroksen rajakatkaisijoiden asennoista. Tämän kaltaisen toteutuksen takia hissin sähkökaappi on sijoitettu alimmalle pysähdystasolle. Modernisoinnin yhteydessä sähkökaappi tullaan sijoittamaan hissikoriin. Kuva 1. Hissin sähkökaappi. Ohjausjärjestelmän kannalta olennaisinta on tietää, mitä olemassa olevia osia voidaan käyttää hyväksi projektissa. Tässä tapauksessa tultiin tulokseen, että korikaapelit ovat varsin hyvät. Viestikaapelina on 16x1 ja sen pitäisi olla johdin määrältään riittävä, mikäli kerroskutsuihin ei käytetä ns. kahdensuuntaisia kutsuja (ylös/alas). Näin ollen myös pysähdystasojen painikekotelotkin olisivat vielä ihan hyvässä kunnossa. Kuva 2. Oikealla on vapaasti roikkuva viestikaapeli, kuva on hissin katolta.

5 Aluksi ajattelin painonappikoteloiden tilalle, jotain ihan uudenaikaista, kuten kosketusnäyttöä, mutta kuvat nähtyäni huomasin, että kosketusnäytöt ovat ideana tuhoon tuomitut. Kuva 3. Korin kutsunapit. Kuten kuvasta kolme huomaa, kutsunappeja on käytetty ruuvimeisselin kärjellä, joten lienee itsestäänselvyys, että muunkinlaisia järjestelmiä kohdeltaisiin kaltoin. Kuva4. Nostomoottori, kulmavaihde, veitsikytkin ja tarrain. Kuvassa neljä on esitelty nostolaitteisto. Kuvan vasemmassa yläreunassa oleva kulmavaihde (oranssi mötikkä) välittää moottorin (vaaleansininen mötikkä) pyörimisliikkeen nostohammaspyörälle. Kuvassa on myös kaksi tärkeää turvalaitetta. Ensimmäinen on turvatarrain (kulmavaihteen alapuolella oleva harmaa mötikkä), joka toimii mekaanisesti epäkesko periaatteella (kuvernööri). Vauhdin noustessa tarpeeksi yli
 välittää moottorin (vaaleansininen mötikkä) pyörimisliikkeen nostohammaspyörälle. Kuvassa on myös kaksi tärkeää turvalaitetta.")
6 nimellisnopeuden (1,2 yleinen kerroin) tarrain laukaisee ja matkanteko loppuu siihen. Tarraimet ovat suunniteltu siten, että tarrain pystyy yksinään kannattamaan koko hissin maksimi nimelliskuorman tietyllä varmuuskertoimella. Toinen kuvassa oleva turvalaite on veitsikytkin (vaalean harmaa mötikkä, jossa vipu) Veitsikytkimen ajatuksena on toimia toimintarajakytkimenä. Tämä tarkoittaa, että veitsikytkimen vivun tielle on asetettu este toimintarajalla, mikäli veitsikytkin vääntyy, se katkaisee nostomoottorille tulevat vaiheet. Veitsikytkin on melko vanhahtava ratkaisu ja nykyään käytetään rajakatkaisijoita, jotka ohjaavat kontaktoreita.

7 Modernisoidun ohjausjärjestelmän rakenne Ohjausjärjestelmä tullaan uudistamaan käyttäen PLC-logiikkaa (PLC) ja taajuusmuuttajaa (tamu). Ensin mainittu hoitaa kutsujen käsittelyn ja jälkimmäinen hoitaa paikoituksen. Molemmille tullaan toteuttamaan tarkoitukseen sopiva ohjelma. Taajuusmuuttajan käyttämiseen päädyttiin, koska taajuusmuuttaja käyttö yksinkertaistaa hissin paikoituksen toteuttamista, se avulla paikoitus on tarkempaa, sekä pitkällä aikavälillä se säästää nostolaitteiston osia, esimerkiksi noston jarrun käyttö vähentyy huomattavasti, kun käytetään taajuusmuuttajaa. PLC:n ja tamun viestintä toteutaan käyttäen Modbus väylää. Syitä tähän on edullisuus ja toisaalta Modbus väylä on lähes standardi tamu käytössä. Kutsujärjestelmän osat tullaan pitämään ennallaan tai ne tullaan uusimaan samankaltaisiin. Ainoana lisänä pysähdystason kutsujärjestelmään lisätään hissi kutsuttu valo. Tämä johtuu siitä, että hississä on ennestään hyvä korikaapeli, jolla pysähdystasojen kutsut voidaan tuoda suoraan logiikan I/O:hon (korikaapeli on yllättävän kallista). Korin kutsujärjestelmään uutena ominaisuutena tulee huolto/kerrosnäyttö. Tarkoituksena on, että normaali käytössä näyttö näyttää hissin suunnan, kerroksen ynnä muita perustietoja, mutta sillä ei tehdä minkäänlaisia ohjaustoimintoja, joka johtuu aiemmin mainitusta ruuvimeisselien suosiosta. Näytön huoltotilan ajatuksena on taas tuoda esiin hissin vikalista ja mahdollistaa jonkin asteinen parametrointi huoltonäytön kautta. Kuva 5. Ohjausjärjestelmän periaatekuva. Kuvassa viisi on esitelty hissin ohjausjärjestelmän rakenne. Tärkeintä on huomioida, että informaation pullonkaula sijaitsee korin ja tasojen välissä. Toinen huomio on, että ohjausjärjestelmän skaalautuvuus voidaan tällä kertaa unohtaa, koska korin ja kerroksen välille ei laiteta väyläkaapelia.

8 Ohjausjärjestelmän kannalta suurimmat muutokset tullaan tekemään paikoituksen toteuttamiseen, aiemmin mainittu ratas järjestelmä poistetaan ja tilalle laitetaan joko inkrementti- tai monikierrosabsoluuttianturi. Toteutus tehdään niin, että hissin hammastangolle viedään erillinen mittahammaspyörä, joka laskee hissin paikan. Juuri mittahammaspyörän käyttö mahdollistaa absoluuttianturin käyttämisen. Asia voidaan todentaa muutamalla helpohkolla laskulla (luvut eivät ole ihan täsmällisiä, mutta ajatuksena on tuoda idea esille). Otetaan selkeyden vuoksi esimerkiksi melko yleinen 4096 kierroksen absoluuttianturi. Yleisin hammastankohisseissä käytettävä hammaspyörän moduuli on 6 (Syy tähän: SFS-EN A1: ). Oletetaan, että mittahammaspyörä on suorahampainen ( ) ja siinä on 12 hammasta (pienin, jonka löysin). Näillä tiedoilla voidaan laskea kuinka korkean nousun valittu absoluuttianturi mahdollistaa (kaavat koneenrakennustekniikka B kaavakokoelma): ja (1) Nyt siis saadaan laskettua nousu, josta (2). (3). (4) Siispä mittapyörän käyttö mahdollistaa perinteisen absoluuttianturin käyttämisen lähes tilanteessa kuin tilanteessa. Tätä voidaan verrata tilanteeseen, jossa anturi olisi kiinnitetty suoraan moottorin akseliin. Oletetaan, että moottori pyörii 1500 r/min, vaihteiston välitys 70:1, nostohammaspyörässä on 15 hammasta (nämä melko lähelle oikeaa). Nyt siis nostohammaspyörän mahdollisten kierrosten lukumäärä: Tästä saadaan nousu:. (5), (6) siis seitsemän kerroksiselle hissille saadaan, että kerrostasojen maksimi etäisyys olisi 2,3 metriä. Uskaltaisin sanoa, että tämä on liian vähän. Markkinoilta löytynee monikierrosabsoluuttiantureita, jotka pystyvät paljon parempaankin suorituskykykyyn, mutta näiden kohdalla ongelmaksi muodostuu kommunikointi taajuusmuuttajan kanssa, josta kerron tuonnempana. Mielestäni 4096 kierroksen suorituskyky on melko hyvä arvio milliampeeri tuloon (joskin melko optimistinen) kytkettävälle anturille. Modernisoinnissa käytettävät komponentit Hissin sähköinen ohjausjärjestelmä tullaan korvaamaan Mitsubishi FX3G logiikalla, Yaskawa A1000 taajuusmuuttajalla ja pulssianturilla. Lisäksi hissikoriin tulee Mitsubishin E1043 operointipääte, johon tullaan suunnittelemaan kaksi tilaa: ajo-tila, jossa näytössä esitetään hissin perustietoja, kuten kerros ja suunta ja huolto-tila, jossa huoltomies saa näkyviin vikadiagnostiikkaa ja pääsee mahdollisesti muuttamaan jotain tärkeimpiä parametreja.
.")
9 FX3G logiikkaan päädyttiin laajennusmahdollisuuksien ja melko edullisen hinnan takia. Versioksi valittiin 14 sisääntuloa ja 10 relelähtöä sisältävä versio. Mikäli osoittautuu, että versiossa on sisääntuloja liian vähän, voidaan logiikkaa laajentaa lisäkortilla. Hinnaltaan tämänkaltainen ratkaisu on edullisempi kuin ostaa 40 IO:n versio. Logiikkaan otettiin RS485 laajennuskortti, jonka avulla voidaan käyttää Modbus-väylää logiikan ja taajuusmuuttajan välillä. Yaskawa A1000 taajuusmuuttajaa ei ole vielä hankittu, mutta sellainen tullaan hankkimaan ja ohjelmisto tätä silmälläpitäen suunnittelemaan. Pääsyitä tähän ovat hyvät kokemukset Yaskawan taajuusmuuttajista ja erinomainen tuki ongelmatilanteissa. Taajuusmuuttajaan tullaan tekemään takaisinkytkentä, joko monikierrosabsoluuttianturilla milliampeerituloon (4-20mA) tai inkrementtianturilla (TTL). (Valintaa ei ole vieläkään tehty, koska tärkeää informaatiota puuttuu) Haasteet ja ongelmat Modernisointiin tarvittavien automaatiokomponenttien selvittämiseen ja hankkimiseen kului paljon aikaa. Pääasiassa ongelmana oli melko kapea kontaktipinta automaatio alan toimittajiin, sekä melko vähäinen kokemus automaatio komponenttien hankkimisesta. Lisäksi isommilla toimittajilla oli melko vähän kiinnostusta tarttua tämänkaltaiseen pikkuprojektiin. Toinen mielenkiintoinen piirre on, että taajuusmuuttajat (Yaskawa ja Mitsubishi) eivät tue vakiona SSI protokollaa, jos siis haluaa käyttää absoluuttianturia, pitää se liittää väylään tai analogiatuloon. Väylässä käytettävä olisi muuten hyvä vaihtoehto, mutta jostain ihmeellisestä syystä Yaskawan taajuusmuuttaja ei osaa lukea anturitietoa suoraan väylästä vaan se pitäisi kierrättää väylän isännän kautta, mikä taasen aiheuttaisi aivan järkyttävät viiveet. Analogia tuloon liitettävän absoluuttianturin huono puoli taas on milliampeeritekniikan epätarkkuus. Joskin hissikäytössä paikotustarkkuus on senttimetriluokassa, joten on mahdollista, että milliampeeriviesteillä toimiva absoluuttianturi on riittävä. Käytettävät kehitysympäristöt Projektin ohjelmointi ja konfigurointi työt tullaan suorittamaan komponenttitoimittajien kehitysympäristöillä. Mitsubishin ympäristö on nimeltään GX Developer ja se noudattaa IEC standardia. Ensi vaikutelma GX Developerista ovat olleet positiiviset. Ohjelma on intuitiivinen, ohjekirjan selailuun ei ole tarvinnut ainakaan vielä käyttää paljon aikaa. Erityisesti miellyttää mahdollisuus määritellä lohkojen suoritusjärjestys Networkkien avulla tarkasti. Tarkemmin sanottuna kokonainen logiikan ohjelmisto koostuu taskeista, joita erilaiset tapahtumat käynnistävät. Taskit taas koostuvat program oranization uniteista (POU). GX Developer vaikuttaa siten toteutetulta, että muutokset ohjelman ylimmilläkään tasoilla eivät välttämättä ole kovin työläitä, koska ohjelma on mahdollista pilkkoa järkeviin osiin.


10 Kuva6. GX Developer ohjelmointi ympäristö. Kuvassa kuusi on GX Developerin päänäyttö, jossa on yksi POU auki. Kuva 7. GX Simulator. GX Developerissa on myös ohjelman testausympäristö GX simulator, jonka ansiosta testausta voidaan suorittaa toivon mukaan melko pitkälle ilman, että ohjelmia ei tarvitse latailla PLC:lle. GX simulator mahdollistaa ainakin laajamittaisen IO simuloimisen. Kuva 8.GX Simulator timing chart. Kuvassa 8 on GX Simulatorin timing chart, josta voi katsoa, miten logiikka ohjelma käyttäytyy, kun tietyt inputit aktivoituvat. Inputtien aktivoitumiseen voi asettaa ehtoja, asettaa inputin olemaan aina päällä tai lisätä siihen manuaalisen painonapin. Yaskawan invertteriä ohjelmoidaan DriveWorkEz ohjelmistolla. Se ei ole IEC standardin mukainen ohjelmointiympäristö. Ensivaikutelma DriveWorksEz ohjelmistosta on hyvä. En ehtinyt projektityökurssin puitteissa aloittaa taajuusmuuttajan varsinaista ohjelmointityötä, mutta DriveWorksEZ:taa opettelin



11 käyttämään sen verran, että totesin sen muistuttavan paljon GXdeveloperia. Pääasiallisena erona on, että DriveWorksEz on räätäilöity kahden Yaskawan taajuusmuuttajamallin ohjelmointiin. Tämän takia ohjelma on melko, esimerkiksi apumuuttujien määrittely on mahdotonta. Kuva 9. DriveWorksEz Kuvassa 9 on DriveWorksEZ:tan päänäyttö. Kuvasta käy ilmi toinen ohjelman harmillinen puute, joka on networkkien puute, jotka löytyy GxDeveloperista. HMI:n suunnitteluun on myös ohjelmistonsa nimeltä E-Designer, jonka peruskäytön oppiminen oli sinällään helppoa, mutta ohjelman mahdollisuudet ovat niin laajat ja mahdollistavat monimutkaisten asioiden suorittamisen prosessinäytössä, että ohjelman opettelu on vielä kesken. Peruskäyttö onnistuu kuitenkin jo hyvin ja todennäköisesti hissiin tarvittavat visualisoinnit saadaan suoritettua kohtuullisella vaivalla. Yllättäen vaikeimmaksi asiaksi muodostui luodun ohjelman laataaminen HMI:hin. Ohjelma oli tarkoitettu ladattavaksi, joko sarjaportin tai verkkokaapelin kautta. Sarjaportti-yhteyden toimintakuntoon saattaminen osoittautui tuntemattomasta syystä mahdottomaksi. Verkkokaapelin yli ohjelman lataaminen lopulta onnistui. Tosin tietokoneen IP-asetukset piti muuttaa vastaamaan HMI:n oletusasetuksia. Jouduin painimaan ongelman kanssa tuskallisen pitkän ajan ennen kuin tajusin, miten yhteyden saa muodostettua. Kuva 10. E-designer ohjelmisto.

12 V-Malli Koneenohjausjärjestelmän V-mallin tavoitteena on sitoa ohjausjärjestelmän suunnittelu ennalta määriteltyyn toimintatapaan ja näin helpottaa ohjausjärjestelmän toteutusta ja parantaa turvallisuutta. V- mallin käyttäminen on sinänsä hieman ristiriitaista, mutta erittäin suositeltavaa. Ristiriitaista siksi, että malli olettaa, että yksi vaihe tehdään loppuun ja sitten siirrytään seuraavaan, kuten kuvassa 11 on esitetty. Kuva 11. Koneenohjausjärjestelmä suunnitteluun tarkoitettu V-malli. Huomasin kuitenkin, että varsinkin, jos ei ole kovin tarkkaan tiedossa mitä on tekemässä, kannattaa hypätä hieman vaillinaisilla tiedoilla hetkeksi seuraavaan vaiheeseen. Kun asiaa on tutkinut seuraavan vaiheen kannalta ja saanut ajateltua järjestelmän toteutusta pidemmälle, pitää siirtyä takaisin aikaisempaan vaiheeseen täydentää se valmiiksi. Kun yhden vaiheen on saanut kokonaan valmiiksi, on seuraavan vaiheen miettiminen paljon helpompaa. V-mallin hyödyt alkavat varmasti tulla vielä enemmän esiin, kun on kokemusta sen käyttämisestä ja koneen ohjausjärjestelmien suunnittelusta ylipäätään. Vaatimusmäärittely Vaatimusmäärittelyn tarkoituksena on määritellä ohjausjärjestelmän toiminta yleisellä tasolla. Erityinen huomio on ihmiseen koneen välisessä toiminnassa, jonka määrittely tapahtuu käyttötapausten avulla. Käyttötapausten pohjalta tehdään myös alustava riskiarvio, joka sisältää riskin kuvauksen, vaarallisuuden arvioinnin ja ehdotetut toimenpiteet riskin välttämiseksi. Kun vaatimusmäärittely on valmis, tulisi suunnittelijan ymmärtää koneen toiminta yleisellä tasolla ja tiedostaa koneen toimintaan liittyvät riskit.

13 Vaatimusmäärittelyt toimivat tässä työssä juurikin toivotulla tavalla. Vaikka hammastankohissit ovat tuttuja laitteita, sain käyttötapausten laatimisen jälkeen vielä syvällisemmän kuvan hissin toiminnasta. Tämän jälkeen tuntui selkeältä alkaa laatimaan järjestelmätoimintojen määrittelyä. Käyttötapaukset Käyttötapausten ajatuksena on toimia lähtötietoina riskinarvioinnille ja toimia vaatimusmäärittelyinä. Käyttötapauksissa pyritään todentamaan ihmisen ja koneen välinen vuorovaikutus. Tässä projektityössä keskitytään käyttötapauksiin, jossa on mukana hissin ohjausjärjestelmä. Ohessa lista muodostetuista käyttötapauksista: 1. Käyttöönotto 2. Pysähdystasojen kalibrointi 3. Kutsunappia painetaan 4. Hissiin siirtyminen 5. Hississä matkustaminen 6. Hissistä poistuminen 7. Huolto 8. Käytöstä pois saattaminen Käyttötapaukset esitellään liitteessä 1 kokonaisuudessaan. Niihin on suositeltavaa tutustua, koska niihin tullaan viittamaan työn kuluessa. Riskinarviointi Riskinarviointi on laaja käsite ja se voi käsittää melkein mitä tahansa, tässä työssä kuitenkin asiaa lähestytään siltä kantilta, että ensimmäisessä vaiheessa muodostetaan käyttötapausten pohjalta mahdollisia vaara tapauksia joille tehdään PHA-analyysi, jonka pohjalta määrätään vaaran SIL taso. SILtason pohjalta voidaan tehdä alustavat suositukset turvatoimenpiteistä. Tehdyt vaaran arvioinnit löytyvät liitteestä kaksi. Seuraavassa vaiheessa otetaan mukaan C-tyypin hissi standardin asettamat suoritustaso vaatimukset turvallisuus kriittisille toiminnoille. Näiden pohjalta pohditaan liittyvätkö turvallisuuskriittiset laitteet ohjausjärjestelmään. Mikäli osoittautuu, että turvallisuuskriittiset laitteet tai toiminnot liittyvät jotenkin ohjausjärjestelmän toimintoihin täytyy toiminnolle määrittää diagnostiikan kattavuuden taso (DC) ja selvittää toimintoon liittyvän kanavan vaarallinen keskimääräinen vikaantumisaika ( ). Määritettyjen tietojen avulla voidaan määrittää tarvittava turvatoiminnallisuus, joka kattaa vaaditun diagnostiikan kattavuuden tason, standardin SFS EN ISO liitteen E.1 avulla. Taulukko2. SFS-EN A1 standardin vaatimat suoritustasot turvallisuuskriittisille toiminnoille [1, Liite B].


14 Taulukossa 2 on esitetty C-tyypin hissistandardin turvallisuus kriittiset toiminnot. Liitteessä 3 on lainaus kandidaatintyöstä hammastankohissin ohjausarkkitehtuurit, joka käsittelee turvapiirin toimintaa. Tässäkin hissin modernisoinnissa käytetään turvapiiriä, jolloin ainoat mahdolliset listassa ohjausjärjestelmään liittyvät laitteet ovat korinportin lukon ohjaus ja huoltoajokytkin. Nämäkin toiminnot pyritään toteuttamaan erillisenä ohjausjärjestelmästä. Taulukko 3. Kanavan vaarallinen keskimääräinen vikaantumisaika [2,4.5.2] Taulukossa 3 on kanavan vaarallinen keskimääräisen vikaantumisaika, jota tarvitaan diagnostiikan kattavuuden lisäksi tarvittavan turvatoiminnallisuuden määrittämiseen. Tieto pitää kysyä valmistajalta, laskea SFS EN ISO liitteiden C ja D menetelmillä tai valita 10 vuotta [2]. Myöhemmin huomataan, että huoltoajokytkimelle ja korinlukon ohjaukselle (suoritustaso d) ainoastaan ensimmäinen on varteenotettava vaihtoehto. Taulukko 4. Diagnostiikan kattavuus [2,4.5.3]

15 Taulukossa 4 on määritelty diagnostiikan kattavuuden vaihteluvälit. Diagnostiikan kattavuus on tehokkuuden mitta, joka määrittää vaarallisten vikaantumisten vikaantumistaajuuden ja kaikkien vikaantumisien vikaantumistaajuuden suhteen [2, ]. Kuva 12., ja suoritustason välinen suhde nimettyihin luokkiin. Taulukoiden 2-4 avulla määritellään kuvasta 12 tarvittava diagnostiikan kattavuuden ja vaarallinen kanavan keskimääräinen vikaantumisajan suhde nimettyihin. Nimetyillä luokilla tarkoitetaan standardin SFS EN ISO kappaleessa 6.23 määriteltyjä luokkia, jotka määrittelevät ohjausjärjestelmän rakenteen. Kuten kuvasta 6 huomataan suoritustasolle d, vaaditaan rakenteelle luokka 2-4. Käytännössä luokka 2 on ainoa järkevä ratkaisu. Käytännössä tarkoittaa, että diagnostiikankattavuuden pitää tällöin olla matala tai keskimääräinen, sekä :n korkea

16 Kuva 13.Luokan 2 mukainen nimetty ohjausjärjestelmä rakenne [2, 6.2.5] Käytännössä luokan 2 vaatimus on, että komponenttien valinnan pitää noudattaa standardeja, niiden pitää kestää odotettavissa olevat vaikutukset ja turvatoiminto pitää tarkistaa tasaisin väliajoin. Turvatoiminnon menetys havaitaan tarkistuksessa. Käytännössä tämä voi tarkoittaa esimerkiksi turvarelettä, joka saattaa hissin turvalliseen tilaan (pääkontaktori päästötilaan), mikäli havaitsee anturi arvojen olevan järjettömiä. Ehkäpä tämä lyhyt katsaus PLC pohjaisten turvallisuustoimintojen validointiin osoittaa miksi hissi sovelluksissa on pääsääntöisesti järkevää käyttää turvapiiriä turvatoimintojen toteuttamiseen, ohjelmistopohjaisten sijaan. Tulot, lähdöt ja väyläsignaalit Tulojen, lähtöjen ja väyläsignaalien määrittely on myös tärkeä osa vaatimusmäärittelyä, koska suurin osa tapahtumista alkaa niiden aktivoitumisesta. Alla on esitetty alustava lista järjestelmän IO:sta. Lista tulee päivittymään ajan mukaiseksi, kun esimerkiksi tamun ja PLC:n kommunikaatiosta on enemmän tietoa. Taulukko 6. Järjestelmä tulot, lähdöt ja väyläsignaalit Status: Odottaa valmiita sähkösuunnitelmia Input Nimi Tehtävä 1 7 Kerroskutsu Ajaa hissin haluttuun kerrokseen 8 Turvapiiri_ok Tarkistaa onko turvapiiri kiinni 9 kerrosinduktiivi Todentaa, että kori on sallituissa rajoissa kerroksesta 10 Korkeusanturi Kertoo hissin paikan Output Nimi Tehtävä 2 Hissi_kutsuttu Kertoo valolla, että hissi on kutsuttu Väylä Nimi Tehtävä V1 Aja_osoitteeseen Lähettää PLC:ltä tamulle käskyn "Aja osoitteeseen x" V2 Tamun_status Tamu lähettää statuksensa PLC:lle sen muuttuessa
![6.2.5] Käytännössä luokan 2 vaatimus on, että komponenttien valinnan pitää noudattaa standardeja, niiden pitää kestää odotettavissa olevat vaikutukset ja turvatoiminto pitää tarkistaa tasaisin](/docs-images/53/16424352/images/page_16.jpg "väliajoin. Turvatoiminnon menetys havaitaan tarkistuksessa.")
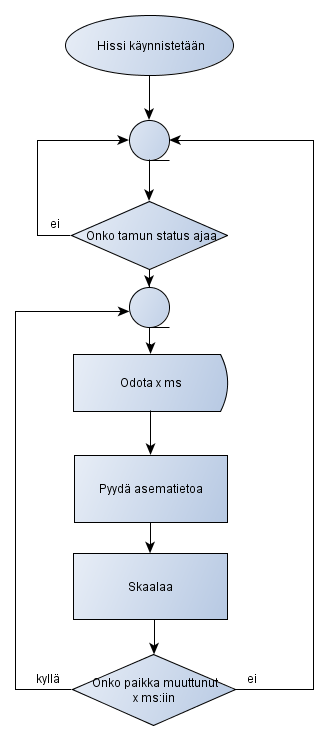
17 V3 Pulssiluku Tamu lähettää PLC:lle pulssilukua määrävälein V4 Vaihda_osoite PLC lähettää tamulle käskyn "Vaihda osoite x" V5 Vahvista_vaihdos Tamu vastaa PLC:lle "Osoite vaihdettu" tai "Vaihto hylätty", jos PLC on pyytänyt osoitetta vaihdettavaksi Järjestelmätoimintojen määrittely Järjestelmätoimintojen määrittelyn tavoitteena on määritellä toiminnot tiettyjen tapahtumien aktivoituessa. Aktivoiva tapahtuma voi olla esimerkiksi tulon, lähdön tai väyläsignaalin aktivoituminen, jonka perusteella aloitetaan esimerkiksi ohjelmatoiminnon suoritus. Alla on yksi esimerkki vaatimus määrittelystä, joka on tehty flow chartilla Kuva 14. NFunc_3 Hissin kulkusuunnan ylläpito Kuvassa 14 on esitetty hissin kulkusuunnan ylläpito toiminto, joka päivittää hissin kulkusuunnan pulssiluvun muuttumisen mukaan. Flow charttien avuksi pitää tehdä vielä vaatimusmäärittely kaavake, joka tukee niiden sisältöä. Taulukossa 5 on esitetty järjestelmätoimintojen lista, joka on jaettu laitekohtaisesti. Ratkaisu on sinällään helposti käsitettävä, mutta se sinällään vääristää arkkitehtuurin kuvaa siltä osin, että listan perusteella voisi päätellä jokaisen laitteen olevan itsenäisiä. Näin ei kuitenkaan ole vaan taajuusmuuttaja ja huoltopääte

18 toimivat PLC:n alaisuudessa ja käytännössä molempien ohjaus tapahtuu PLC:n kautta. Näin ollen tamun ja huoltopäätteen järjestelmä toimintojen määrittely ottaa kantaa lähinnä parametreihin. Taulukko 5. Järjestelmätoimintojenlista Tunniste Toiminnonnimi Logiikka PLCf_1 PLCf_2 PLCf_3 PLCf_4 PLCf_5 PLCf_6 SPLCf_1 SPLCf_2 Kerroskutsujen käsittely Kutsupino Suuntatiedon ylläpito Asematiedon ylläpito Vikadiagnostiikka Modbus master konfiguraatio Kerrosvahti Turvapiiri_OK Tamu VFDf_1 VFDf_2 VFDf_3 VFDf_4 VFDf_5 VFDf_6 Osoitteeseen ajo Osoiteen vaihto Moottorin ohjaus Ohjauksen status Pulssiluvun lähetys Modbus parametrit Huoltopääte Hfunc_1 Kerrostasojen kalibrointi Hfunc_2 Vikatietojen esittäminen Hfunc_3 Asetusten muuttaminen Hfunc_4 Testinäyttö Hfunc_5 Statusnäyttö Taulukossa viisi lihavoidut järjestelmätoiminnot on suunniteltu. Syy miksei kaikkea saatu tehtyä jakautuu kahteen osioon. Toimintojen PLCf_5, SPLCf_1 ja SPLCf_2, Hfunc_1 ja Hfunc_2 kohdalla syy on, että niiden suunnittelu vaatii tietoa, mitä tietoa logiikalle on saatavissa sähköjärjestelmältä. Koska kunnostus projektista ei ole vielä olemassa sähkökuvia, on esimerkiksi mahdotonta ottaa kantaa k uinka laajat vikadiagnostiikan ominaisuudet logiikan avulla voidaan toteuttaa. Toinen syy on ajan puute selvitellä asioita aktiivisesti sidosryhmiltä, pureudun aiheeseen kappaleessa tulosten arviointi paremmin. Taajuusmuuttajatoimintojen osalta ongelmaksi muodostui tieto anturityypin valinnasta. Korkeustiedon käsittely muuttuu melko erilaiseksi riippuen luetaanko se TTL tulosta vai analogiatulosta milliampeeriviestinä. Toinen seikka on vaillinaiset tiedot moottoreista, joita en saanut aikaiseksi selvittää. Toteutetut järjestelmätoiminnot löytyvät liitteestä 3.


19 Ohjelmistotoiminnot Ohjelmistotoiminnon tarkoitus on kuvata ohjelmiston toiminta tietyissä järjestelmätoiminnon tapauksissa. Ajatuksena on laajentaa järjestelmätoiminto toteutuskelpoiseksi määrittelemällä tarvittavat ohjelmistotoiminnot. Erityisen tarkasti pitää kirjata rajapintaan tulevat ja lähtevät signaalit, käyttäen ohjelmoinnissa käytettäviä tietotyyppejä. Lisäksi kannattaa kirjata mitä arvoja yksittäinen signaali voi saada, esittää mahdollinen signaalin skaalaussuhde, sekä selittää mitä yksittäisen signaalin arvot merkitsevät ohjelman suorituksessa. Tässä vaiheessa alkoi näkyä kokemattomuuteni V-mallin käytössä. Aluksi en ymmärtänyt, mitä hyötyä ohjelmistotoimintojen tarkasta suunnittelusta on. Näin ollen aloin kokeilemaan, miten toteutusvaihe sujuu. Hyvin äkkiä tuli seinä vastaan ja jouduin palaamaan takaisin suunnittelu vaiheeseen. Tästä oli kuitenkin se hyöty, että tajusin, että kahden päätoiminnallisuuden toteuttaminen siis Modbus-kommunikoinnin ja kutsujen käsittelyyn tarvittavan tietorakenteen osoittautui hyvin työlääksi. Sen takia päätin kurssin puitteissa vain keskittyä Modbus-kommunikaatioon. Päädyin tähän ratkaisuun, koska halusin ennen kaikkea keskittyä V-mallin opettelemiseen ja toisaalta näkemykseni mukaan Modbus-kommunikointi on arkkitehtuurin tärkein osakokonaisuus. Modbus-kommunikoinnin kohdalla tuntui luontevimmalta jakaa ohjelmistotoiminnot hierarkkisesti, mitä alemmas hierarkiassa mennään, sitä vähemmän tietoa Modbus-rajapintaan voidaan viedä ja tuoda. Kuvassa 15 käynee paremmin ilmi mitä tarkoitan hierarkkisella toteutuksella. Kuva 15. Modbus-kommunikaation hierarkkinen toteutus Liitteessä 4 on esitelty ohjelmistotoimintojen Soft_1, Soft_1_1, Soft_1_1_1 ja Soft_1_1_1_1 toteutus. Tarkoituksena on esitellä miten hierarkkinen toteutus näkyy ohjelmistotoiminnoissa. Toisaalta kyseisten toimintojen esittely riittää kattamaan testausasetelma, jotka aion esitellä.

20 Detaalisuunnittelu Detaalisuunnittelun tavoitteena on täydentää aiempia vaiheita ohjausjärjestelmän rakenteen tarkentuessa. Periaatteessa kaikki aiemmat vaiheet pitäisi pystyä tekemään ilman tietoa käytettävistä komponenteista ja sitten detaalisuunnitelussa muokattaisiin suunnittelu eri vaiheet vastaamaan valittuja komponentteja. Detaalisuunnittelu vaihe toimiikin periaatteessa juuri kyseisellä tavalla, mutta sanoisin sen painottuvan virheiden korjaamiseen ohjelmistosuunnittelussa. En myöskään usko, että komponenttien valinnan pystyy jättämään auki detaalisuunnitteluun asti, ellei ole erittäin rautaista kokemusta työkoneiden ohjelmistosuunnittelusta. Oman näkemykseni mukaan V-malli on hallittavissa, kun vaatimusmäärittelyt määrittävät tarvittavan arkkitehtuurirakenteen, järjestelmätoiminnot määrittävät valittavat komponentit ja komponentit on valittu ennen ohjelmistotoimintojen suunnittelun alkua. Toteutus Toteutus vaiheessa lähdetään lopulta toteuttamaan hyvin suunniteltuja ohjelmistotoimintoja. Homman pitäisi sujua ilman vaikeuksia. Mikäli omaa kokemusta V-mallin käytöstä aikaisemmin, homma meneekin varmasti näin. Todellisuudessa jouduin hyppimään aikaisemmissa vaiheissa useamman kerran, vaikka toteutettujen ohjelmistotoimintojen määrä ja melko vähäiseksi. Syynä tähän oli, että en ollut ennestään tuntenut Modbus-väylän toimintaa ja jouduin opettelemaan hommaa erittäin pitkän kaavan mukaan. Kun Modbus väylä oli saatu logiikan osalta toimimaan, alkoi ongelmia muodostua testaus vaiheessa vieläkin lisää. Liitteessä 5 on esitetty liitettä 4 vastaavat ohjelmistotoimintojen toteutukset. Kuvista käy ilmi hierarkkisesta ajattelusta on hyötyä. Kun esimerkiksi selvitetään PLCf_1 onko tamu virhetilassa riittää, että otetaan Soft_1_1_1_1 funktiolohko eikä taajuusmuuttajan tietoja tarvitse joka kerta erikseen määritellä toteuksiin. Yksikkötestaus Yksikkötestauksen tarkoituksena on testata yksittäisten ohjelma moduulien toimintaa. Tässä työssä otettiin testaukseen ohjelmistotoiminnossa soft_1 esiintyvä ModbusFxMaster-moduuli, koska halusin todentaa modbus-väylän toiminnan. Liitteessä 6 on esitelty testaussuunnitelma. Yleensä yksikkötestit taidetaan ajaa debugger ympäristössä. Nyt kuitenkin päädyin lataamaan softan PLC:lle, koska en keksinyt järkevää tapaa testata väylän toimintaa debugger-ympäristössä. Testaus aloitettiin laittamalla laitteisto käyttökuntoon. Kuvassa 16 on esitetty laitteisto, jota yksikkötestauksessa käytettiin. PC:llä pyöritettiin Matlabissa simulaattoria, joka kirjoittaa modbusprotokollan mukaisen vastauksen väylään. Toteutettu simulaattori on esitetty liitteessä 7. Kuva 16. Yksikkötestauksessa käytetty laitteisto.

21 Tulosten arviointi Tässä kappaleessa arvioidaan miten projekti on onnistunut yleisellä tasolla ja verrattuna suunnitelmaan. Lisäksi käsitellään saavutettiinko asetettuja oppimistavoitteita. Lisäksi kappale sisältää muutaman sanan projektin jatkumisesta. Projektityö jakautui kahteen osaan. Ensimmäinen osa oli ohjausarkkitehtuurin sopivien komponenttien valitseminen ja hankkiminen. Toinen osio oli V-mallin mukainen ohjelmistonkehitys. Molemmat osa-alueet osoittautuivat haastaviksi omalla tavallaan. Minulla on kokemusta ennestään teknisten komponenttien hankkimisesta varaosamyynnin osalta. Työssä kuitenkin osoittautui, että komponenttien hankkiminen on huomattavan paljon haastavampaa, kun pitää ensin itse määritellä kriteerit mitä tarvitsee ja sen jälkeen lähteä metsästämään halutunlaista komponenttia. Toisaalta omat hankaluutensa toi komponenttien yhteensovittaminen. Lopulta kuitenkin sopivat komponentit löytyivät korkeusanturia lukuun ottamatta (kaveri lupasi soittaa viimeistään ensi viikolla, nyt ensi viikosta on kulunut kuukausi). V-mallin osalta tilanne oli lähtökohdiltaan haastavampi. Automaation tietotekniset järjestelmät ja kappaletavaratuotannon automaatio kurssit alla ja siihen suunnittelu kokemus oikeastaan rajoittuikin. Alku oli lentävä, koska oltiin vahvalla osa-alueella. Piti määritellä hissin käyttötapaukset, jotka menivät hyvällä teknisellä asiantuntemuksella sutjakkaasti. Tämän jälkeen alkoivatkin sitten ongelmat, koska suunnittelukokemuksen puute alkoi näkyä. Ensimmäiseksi ongelmaksi muodostui, että laitteiden hommaamisessa olisi pitänyt olla paljon aktiivisempi ja saada ne hommatuksi aikaisemmin, että niitä olisi ehtinyt kokeilla rauhassa. Toinen keskeinen ongelma V-mallin toteuttamisessa oli, etten oikein osannut hahmottaa työmäärää siirtymävaiheessa, jossa siirryttiin järjestelmätoiminnoista ja ohjelmistotoimintoihin. Yleisellä tasolla työmäärän arviointi oli projektin osalta muutenkin hankalaa kuten, alussa esitetystä suunnitelmasta huomaa se on melko ympäripyöreä, koska käytännössä kyse oli projektista, jossa lähdettiin nollista liikkeelle eikä taustatietoja ollut tarjolla. Jälkeenpäin tuntuu hölmöltä, etten osannut laittaa riskeiksi, että työmäärä voi osoittautua luultua paljon suuremmaksi, koska taustatietoja ei ole tarpeeksi. Projekti onnistuminen riippuu hieman katsantokannasta. Mikäli lukee projektisuunnitelmaa, projektia voi pitää epäonnistuneena. Jos asiaa miettii laajemmasta näkökulmasta ja miettii projektin tulevaisuutta ajatellen, on projekti onnistunut. Projektintyökurssin aikana saavutettiin tarvittava taitotaso suorittamaan projekti loppuun. Tulevana kesänä on tarkoitus toteuttaa ohjausjärjestelmä loppuun ja testata sitä käytännössä. Laitteisto testaus varten on jo olemassa. Mikäli saamme alussa esitetyn hissin kunnostus projektin tehtäväksemme, tullaan ohjausjärjestelmää käyttämään myös oikeasti.
22 Ajankäyttö Myynti Komponenttien hankinta Vaatimusmäärittely Järjestelmätoiminnot Ohjelmistotoiminnot Detaalisuunnittelu Toteutus Yksikkötestaus Dokumentointi Taulukko 6. Ajankäyttö Tehtävä Käytetty aika (tuntia) Komponenttien hankinta 40 Vaatimusmäärittely 24 Järjestelmätoiminnot 36 Ohjelmistotoiminnot 48 Detaalisuunnittelu 16 Toteutus 20 Yksikkötestaus 8 Dokumentointi 18 Yhteensä 210 En pitänyt tarkkaa aikakirjanpitoa, mutta onneksi muiden kouluasioiden johdosta tein yleensä projektia kokonaisen työpäivän verran tai viikonloppuna puolikkaan työpäivän verran. Pääsiäislomalla työpäivät venyivät kymmentuntisiksi. Tämä laskutapa ei koske dokumentointia ja komponenttien hankintaa. Dokumentointiin käytin suunnitelmaan kaksi tuntia, väliraporttiin neljä tuntia ja loppuraporttiin 12 tuntia. Komponenttien hankinnassa työ oli pirstaleista, joten heitin sivistyneen arvioin, joka on todennäköisesti alakanttiin.
23 Viitteet [1] Suomen standardisoimisliitto, SFS-EN A1, Rakennushissit henkilö- ja tavarankuljetukseen pystysuoraan ohjatussa korissa [2] Suomen standardisoimisliitto, SFS EN ISO Koneturvallisuus. Turvallisuuteen liittyvät ohjausjärjestelmän osat. Osa1: Yleiset suunnittelu periaatteet
24 Liite 1 Hissin käyttötapaukset Käyttötapaus 1 Hissin käyttöönotto Elinkaarivaiheet Testaus, koulutus, asetusten teko, vianhaku, huolto ja korjaus Toimijat Laitoksen huoltohenkilökunta Muut henkilöt vaara-alueella Muu laitoksen henkilökunta Toimijan esiehdot Käyttökoulutus Käyttötapauksen esiehdot Hissi asennettu käyttökuntoon Tapauksen kulku 1. Hissin kunto tarkistetaan silmämääräisesti 2. Päävirta kytketään päälle 3. Kutsunappia painetaan 4. Hissi suorittaa käynnistymis toiminnot 5. Hissi ajaa haluttuun kerrokseen ja avaa kerroksen ja korin lukot 6. Ovet aukeavat Poikkeukset Käyttöön otto estetty mikäli turvapiiri on auki, operaatiokontaktori juuttunut tai jokin kulkuovista auki Hissin ovet eivät aukea Lopputulema Hissin ovet auki halutussa kerroksessa ja hissi käyttövalmis Suoritustaajuus Satunnaisesti kerran vuodessa Ohjeet Hissin käyttöönotto kuvataan käyttöohjekirjassa (jota ei vielä ole) Kommentit Tärkeintä päättää mitkä ovat hissin käynnistymistoiminnot Alustava riskiskenaario Hissin korkeusanturi rikki referenssi ajo menee pieleen, hissi yrittää ajaa äärirajoille. Oven lukot rikki, ovet aukevat ennen referenssiajoa Ihminen hissin katolla, kun käynnistymis toimia suoritetaan
25 Käyttötapaus 2 Pysähdystasojen kalibrointi Elinkaarivaiheet Hissin asennus, korjaus tai huolto Toimijat Laitoksen huoltohenkilökunta tai muut asentajat Muut henkilöt vaara-alueella Laitoksen muu henkilökunta Toimijan esiehdot Käyttökoulutus Käyttötapauksen esiehdot Hississä päävirta kytkettynä Tapauksen kulku 1. Mennään hissiin 2. Saatetaan hissi huoltotilaan/ohjelmointitilaan 3. Ajetaan hissi alimmalle tasolle käsiohjaimella 4. Ohjataan hissi täsmälleen pysähdystason kohdalle 5. Tallennetaan sijaintii 6. Jatketaan vaiheita 4 ja 5. kunnes kaikki tasot on ohjelmoitu 7. Saatetaan hissi normaalitilaan 8. Kokeillaan, että ohjelmoidut pysähdystasot toimivat Poikkeukset Käyttöön otto estetty mikäli turvapiiri on auki Jokin kulkuovista auki Operaatiokontaktori juuttunut Hissin ovet eivät aukea Lopputulema Hissikäyttövalmis Suoritustaajuus Ensimmäinen käyttöönotto tai kun logiikka joudutaan korjaamaan kerran viidessä vuodessa Ohjeet Tarkemmat ohjeet löytyvät käyttöohjekirjata Kommentit Alustava riskiskenaario Korkeuden mittausanturi viallinen, kerrokset ohjelmoituvat väärin Logiikassa ohjelmointivirhe
26 Käyttötapaus 3 Hissin kutsuminen pysähdystasolta Elinkaarivaiheet Normaali operointi, testaus, vian etsintä, korjaus Toimijat Laitoksen henkilökunta, revision aikaisen käyttäjät, huolto henkilökunta, asentaja Muut henkilöt vaara-alueella Ei ole Toimijan esiehdot Ei ole Käyttötapauksen esiehdot Hissi otettu käyttöön. Kts käyttätapaus hissin käyttöönotto Tapauksen kulku 1. Painetaan kutsunappia haluttuun kulkusuuntaan 2. Kutsunappi valo syttyy, kun kutsu mennyt perille 3. Mikäli hissi kori on liikkuu pysähdystason suuntaan ja hissi kutsutaan niin hissikori pysähtyy ko. pysähdystasolle Poikkeukset Kutsujärjestelmä ei toimi mikäli, turvapiiri on auki tai jossain kerroksessa ovi on jätetty auki Lopputulema Hissi saapuu kerrokseen Suoritustaajuus krt päivässä Ohjeet Ohjekirja Kommentit Alustava riskiskenaario Ei merkittäviä riskiä
27 Käyttötapaus 4 Hissin ovien aukeaminen ja hissistä poistuminen Elinkaarivaiheet Normaali operointi, testaus, vian etsintä, korjaus Toimijat Laitoksen henkilökunta, revision aikaisen käyttäjät, huolto henkilökunta, asentaja Muut henkilöt vaara-alueella Ei ole Toimijan esiehdot Ei ole Käyttötapauksen esiehdot Hissi otettu käyttöön Kutsunappia painettu Kutsunappia painettu Hissi saapunut kerrokseen Hissi on oven aukaisu alueella Tapauksen kulku 1. Pysähdystason oven lukot aukeavat 2. Hissikorin oven lukko aukeaa 3. Käyttäjä aukaiseen pysähdystason ovet 4. Käyttäjä aukaisee hissikorin oven 5. Käyttäjä siirtyy hissiin 6. Käyttäjä sulkee molemmat ovet Poikkeukset Ovet eivät aukea. Ovien lukot eivät aukea mikäli turvapiiri on auennut. Lopputulema Käyttäjä on poistunut hissistä ja sulkenut ovet Suoritustaajuus krt päivässä Ohjeet Ohjekirja Kommentit Alueelle ei pääse kuin turvallisuus koulutuksen käyneitä henkilöitä Alustava riskiskenaario Hissi lähtee liikkeelle hissin ovien ollessa auki
28 Käyttötapaus 5 Hississä matkustaminen Elinkaarivaiheet testaus, käyttöönotto, normaalioperointi, huolto, vianetsintä ja korjaus Toimijat laitoksen henkilökunta ja muut alueelle pääsevät Muut henkilöt vaara-alueella ei ole Toimijan esiehdot ei ole Käyttötapauksen esiehdot Hissi toimintakuntoinen Tapauksen kulku 1. Painetaan halutun pysähdytason kutsunappia 2. Odotellaan, että hissi siirtynyt halutelle pysähdystasolle Poikkeukset Kutsujärjestelmä ei toimi mikäli, turvapiiri on auki tai jossain kerroksessa ovi on jätetty auki Lopputulema Hissi halutulla pysähdystasolla Suoritustaajuus päivässä Ohjeet Käyttöohjekirja Kommentit Alustava riskiskenaario Mikäli hissikorin oven lukko on rikki voi se aiheuttaa mahdollisen vaaratilanteen
29 Käyttötapaus 6 Hissin ovien aukeaminen ja hissistä poistuminen Elinkaarivaiheet Normaali operointi, testaus, vian etsintä, korjaus Toimijat Laitoksen henkilökunta, revision aikaisen käyttäjät, huolto henkilökunta, asentaja Muut henkilöt vaara-alueella Ei ole Toimijan esiehdot Ei ole Käyttötapauksen esiehdot Hissi otettu käyttöön Käyttäjä on hississä Käyttäjä on painanut kerrosnappia Hissi saapunut kerrokseen Hissi on oven aukaisu alueella Tapauksen kulku 1. Pysähdystason oven lukot aukeavat 2. Hissikorin oven lukko aukeaa 3. Käyttäjä aukaisee hissikorin oven 4. Käyttäjä aukaisee pysähdystason oven 5. Käyttäjä poistuu hissistä 6. Käyttäjä sulkee molemmat ovet Poikkeukset Ovet eivät aukea. Ovien lukot eivät aukea mikäli turvapiiri on auennut. Lopputulema Käyttäjä on poistunut hissistä ja sulkenut ovet Suoritustaajuus krt päivässä Ohjeet Ohjekirja Kommentit Alueelle ei pääse kuin turvallisuuskoulutuksen käyneitä henkilöitä Alustava riskiskenaario Hissi lähtee liikkeelle hissin ovien ollessa auki
30 Käyttötapaus 7 Hissin huolto/korjaus Elinkaarivaiheet vianetsintä, korjaus, määräaikaishuolto Toimijat laitoksen huoltohenkilökunta, muut asentajat Muut henkilöt vaara-alueella Laitoksen muu henkilökunta Toimijan esiehdot Hissin käyttökoulutus, riittävä kokemus hissien korjaus ja huoltotöistä Käyttötapauksen esiehdot Hissi rikki tai määräaikaishuollon aika Tapauksen kulku 1. Testataan kerrosten kalibrointi ajamalla kerrokset läpi 2. Tehdään tarvittaessa pysähtymistasojen kalibrointi 3. Saatetaan hissi huolto/ohjelmointi tilaan 4. Tehdään huoltokirjassa määritetyt tarkastukset ja huoltopiteet 5. Saatetaan hissi normaalitilaan Poikkeukset Jos hissi rikki kutsutaan korjaajat Lopputulema Hissi toimintakuntoinen Suoritustaajuus 4 kertaa vuodessa Ohjeet Ohjekirja Kommentit Ohjausjärjestelmä poiskytketty käytetään pelkkää käsiohjaus Alustava riskiskenaario Puristumis ja leikkautumisvaara kasvanut, koska osa hissin turvalaitteista ohitettu
31 Käyttötapaus 8 Hissin käytöstä pois saattaminen Elinkaarivaiheet testaus ja epänormaalit olosuhteet Toimijat laitoksen huoltohenkilökunta, muut asentajat Muut henkilöt vaara-alueella Laitoksen muu henkilökunta Toimijan esiehdot Käyttökoulutus Käyttötapauksen esiehdot Hissi toimintakunnossa Tapauksen kulku 1. Laitetaan kaikki hissin ja pysähdystasojen ovet kiinnit 2. Kytketään päävirta pois 3. Lukitaan päävirtakytkin Poikkeukset hississä matkustajia Lopputulema Hissi pois käytöstä Suoritustaajuus kerran vuodessa Ohjeet Käyttöohjeet Kommentit Alustava riskiskenaario Matkusjat jää hissiin
32 Liite 2 Hissin vaaran arviointi Vaaran arviointi Ohjauksen aiheuttama yllättävä liike Liittyy käyttötapaukseen Hississä matkustaminen Elinkaarivaiheet Testaus, normaalikäyttö Vaara-alue Hissikori Vaarallinen tilanne X Vaarallinen tapahtuma Hissin taajuusmuuttaja antaa tuntemattomasta syystä äkillisen ääriohjauksen. Vaara Horjahtaminen/kaatuminen Vaaran vakavuus 1 Altistumis taajuus 5 Vältettävyys 3 Esiintymis todennäköisyys 2 Cl-luokka 10 SIL-taso NONE Ehdotetut toimenpiteet Koitetaan säätää TAMU mahdollissiman hyvin
33 Vaaran arviointi Korin lukko aukeaa tahattomasti Liittyy käyttötapaukseen Hississä matkustaminen Elinkaarivaiheet Testaus ja normaalikäyttö Vaara-alue Hissikori Vaarallinen tilanne Matkustaja aukaisee oven liikkessä vahingossa/tahallaan Vaarallinen tapahtuma Korin lukko aukeaa laitehäiriön tai vian takia liikkeessä Vaara Leikkautumisvaara Vaaran vakavuus 4 Altistumis taajuus 5 Vältettävyys 1 Esiintymis todennäköisyys 2 Cl-luokka 8 SIL-taso SIL 2 Ehdotetut toimenpiteet Vaihtoehto 1 Korin turvapiiriin mekaaninen rajakatkaisija, joka tunnistaa oven auki olon Varmennetaan logiikan turvallisuus kriittiset tulot turvareleellä
34 Vaaran arviointi Tahaton napin painallus huoltotilassa Liittyy käyttötapaukseen Pysähdystasojen kalibrointi Hissin huolto Elinkaarivaiheet Testaus, käyttöönotto, vianetsintä, huolto Vaara-alue Hissin välitön läheisyys Vaarallinen tilanne Satunnainen käyttäjä painaa kutsunappia, kun hissi on huoltotilassa Vaarallinen tapahtuma Hissi lähtee liikkeelle, kun huoltomies hissin katolla tai hissikuilussa Vaara Leikkautumis- ja puristumisvaara Vaaran vakavuus 4 Altistumis taajuus 2 Vältettävyys 3 Esiintymis todennäköisyys 2 Cl-luokka 7 SIL-taso SIL 2 Ehdotetut toimenpiteet SFS-EN A1 standardin mukaisesti hissin tulee liikkua vain suoralla käsiohjauksella Tämän lisäksi kutsujärjestelmä vietävä jänniteettömään tilaan
35 Vaaran arviointi Ohjaus toiminto korin oven ollessa auki, mutta pysähdystason oven ollessa kiinni Liittyy käyttötapaukseen Hissiin siirtyminen Hissistä poistuminen Elinkaarivaiheet Testaus ja normaalikäyttö Vaara-alue Hissikori ja pysähdystasot Vaarallinen tilanne Matkustaja siirtymässä tai poistumassa hissistä Vaarallinen tapahtuma Matkustajan siirtyessä tai poistuessa hissistä, kori liikkuu tahattomasti tuntemattomasta syystä Vaara Ruhjoutumien Vaaran vakavuus 3 Altistumis taajuus 5 Vältettävyys 3 Esiintymis todennäköisyys 2 Cl-luokka 10 SIL-taso SIL 1 Ehdotetut toimenpiteet Korin turvapiiriin mekaaninen rajakatkaisija
36 Liite 3 Esimerkkejä hissin järjestelmätoimintojen määrittely PLCf_1
37 PLCf_2
38 PLCf_3
39 PLCf_4
40 Järjestelmätoiminto Modbus viestintä PLCf_6 Laatinut Heikki Laitasalmi Versio 1.0 Liittyvät käyttötapaukset 1,2,3 Sisääntulot Ei ole Lähdöt Ei ole Väyläsignaalit V1 Aja_osoitteeseen V2 Tamun_status V3 Pulssiluku V4 Vaihda_osoite V5 Vahvista_vaihdos Parametrit Nimi Asetus Selitys Protocol Non-procedural Data lenght 8-bit Parity even Stop bit 1-bit Transmission speed 9600bps vakio Header disabled Terminator disabled Control line enabled H/W type RS485 2-lankaisena Control Mode none Sum Check disabled Transmission control procedure Form1 Ei lopetus merkkejä Station number setting 00 Vakio Time out judge time 20 Testaukseen Toiminnallinen määrittely PLC luo VFD:hen sarjaväylä yhteyden, jolla se lukee ja kirjoittaa tietoa VFD:n rekistereistä Turvallisuusvaatimukset Ei varsinaisia turvallisuus vaatimuksia, järkevämpää estää tamun lähdöt
41 Järjestelmätoiminto Ohjauksen status VFDf_4 Laatinut Heikki Laitasalmi Versio 1.0 Liittyvät käyttötapaukset Sisääntulot Ei ole Lähdöt Ei ole Väyläsignaalit V2 Parametrit Datarekisteri 0020H Vastaus Selitys 0 During run 1 During reverse 2 Drive ready 3 Fault 4 Data setting error 5 Multi-function contact output (terminal M1-M2) Multi-function contact (terminal M3-6 M4) Multi-function contact (terminal M5-7 M6) 8 -> D Reserved E ComRef status F ComRef status Toiminnon tyyppi Toiminnallinen määrittely 1. PLC kysyy tamun statusta modbus protokollan yli 2. Tamu vastaa protokollan mukaisesti Turvallisuusvaatimukset Ei varsinaisia vaatimuksia
42 Järjestelmätoiminto Modbus parametrit VFDf_6 Laatinut Heikki Laitasalmi Versio Liittyvät käyttötapaukset Ei ole Sisääntulot Ei ole Lähdöt Ei ole Väyläsignaalit Ei ole Parametrit Nimi No. Asetus Selitys DriveSlaveAddress H5-01 1FH (31D) Communication speed selection H bps Communication parity selection H Even Stopping method after communication error H Hissi pysäytetään Communication fault detection selection H Drive transmit wait time H ms RTS Control Selection H Nolla, koska käytetään RS485 CE Detection Time H s Unit Selction for Modbus register 0025H H =0.1V ja 1=1V Communication Enter Function Selection H Run Command Method Selection H Toiminnon tyyppi Määritellään taajuusmuuttajan modbuskommunikaation vaatimat parametrit Toiminnallinen määrittely Turvallisuusvaatimukset
43 Liite 4 Esimerkkejä hissin ohjelmistotoiminnoista Ohjelmistotoiminto Modbus viestintämoduuli Modbus communication Koodi Soft_1 Liittyy järjestelmätoimintoihin PLCf_6 Määritellyt signaalit Tyyppi Signaalin nimi Skaalaus Arvoalue Selitys Bool NotUseFCode05h06h [0,1] 1=0FH/10H ja 0=05H/06H kirjoittamiseen Bool ReadOnlyDevicesFCode02h04h [0,1] 1=02H/04H ja 0=01H/03H funktiokoodit lukemiseen Bool Run [0,1] Pulssi joka aloittaa komennon Bool ReadOrWrite [0,1] Määritellään onko komento luku/kirjoitus Bool BitOrRegister [0,1] 1=bitti 0=rekisteri Word StationNumber Määrittele osoitteen johon kutsu lähetetään Word StartAddress Ensimmäinen luettava rekisteri Int NoDevices Kuinka monta rekisteriä tai bittiä luentaa Array word WriteData Data joka halutaan kirjoittaa laitteille Määritellyt parametrit Tyyppi Parametri Arvo Arvoalue Selitys Bool FirstScan M8002 M8002 Ensimmäinen lukukerta, M8002 signaali aktivoi Word CommFormat D8120 Määrittellään kommunikointi asetukset D8120 rekiste Int TimeoutEvalTime Lähetyksen aikakatkaisu 1=10ms Bool Echo2Wire 0 [0,1] 1=käytetään kaikua 0=ei käytetä kaikua Bool FX1N_PLC 0 [0,1] 1=Käytetään FX1N plc:tä 0=muu PLC Int MsgToMsgDelay Viestikehysten väli 1=10ms Int BroadcastDelay Broadcastin ja seuraavan komennon väli 1=10ms Int ResponseTimeout Vastauksen aikakatkaisu 1=10ms Int NoOfRetries 5 Kuinka monta kertaa viesti yritetään lähettää Toiminnallinen määrittely Ohjelmisto toiminto lähettää asetuksien ja signaalien määrittämän modbus viestin, kun RUN-liipaistaan Kun modbusin määrittelemä lähetys-vastauspari on valmis, lähetetään nousevan reunan pulssi finish lähtöön Palauttaa Tyyppi Signaalin nimi Arvoalue Selitys Bool Finish [0,1] Nouseva reunan pulssi Array word ReadData Toimilaitteelta luettu data Int ReadDataLenght Luetun datan määrä. Taulukon solujen määrä Bool Error [0,1] Aktivoidaan Finishin kanssa jos virhe Bool CommunicationError [0,1] Aktivoidaan errorin kanssa, jos aikakatkaisu tai viestintävirhe
44 Ohjelmistotoiminto Modbus lukeminen Modbus read Koodi Soft_1_1 Liittyy järjestelmätoimintoihin PLCf_6 Määritellyt signaalit Tyyppi Signaalin nimi Skaalaus Arvoalue Selitys Bool ReadOnlyDevicesFCode02h04h [0,1] 1=02H/04H ja 0=01H/03H funktiokoodit lukemiseen Bool Run [0,1] Pulssi joka aloittaa komennon Bool BitOrRegister [0,1] 1=bitti 0=rekisteri Word StationNumber Määrittele osoitteen johon kutsu lähetetään Word StartAddress Ensimmäinen luettava rekisteri Int NoDevices Kuinka monta rekisteriä tai bittiä luentaa Määritellyt parametrit Tyyppi Parametri Arvo Arvoalue Selitys Bool ReadOrWrite 1 [0,1] Asetetaan modbus lukemaan väylää Toiminnallinen määrittely Ohjelmistotoiminto välittää alemmilta tasoilta tulleen lukupyynnön ylemmälle hierarkkiatasolle toiminto palauttaa pelkästään luetun datan, virheenkäsittely toteutetaan ylemmällä tasolla Palauttaa Tyyppi Signaalin nimi Arvoalue Selitys Array word ReadData Toimilaitteelta luettu data
45 Ohjelmistotoiminto Taajuusmuuttajan status VFDStatus Koodi Soft_1_1_1 Liittyy järjestelmätoimintoihin PLCf_1, PLCf_2, PLCf_3, PLCf_4 Määritellyt signaalit Tyyppi Signaalin nimi Skaalaus Arvoalue Selitys Bool Activate [0,1] Pulssi joka aloittaa komennon Määritellyt parametrit Tyyppi Parametri Arvo Arvoalue Selitys Bool ReadOnlyDevicesFCode02h04h 0 [0,1] Käytetään funktiokoodeja 01H/03H Bool BitOrRegister 0 [0,1] Luetaan rekisteristä Word StationNumber 16#1F Taajuusmuuttajan osoite Word StartAddress 16#20 Luettava rekisteri Int NoDevices 1 Luetaan vain statustieto Toiminnallinen määrittely Activate-signaalin aktivoituessa lähetetään määritellylle taajuusmuuttajalle pyyntö statustiedosta Taajuusmuuttaja vastaa järjestelmätoiminnon VFDf_4 mukaisesti Järjestelmä toiminto palauttaa statustiedon alemmille hierarkkiatasoille heksadesimaalilukuna Palauttaa Tyyppi Signaalin nimi Arvoalue Selitys Word Status [1,F] Tamun status
Hammastankohissin modernisointi. Heikki Laitasalmi
 Hammastankohissin modernisointi Heikki Laitasalmi Loppudemossa Mitä oltiinkaan tekemässä V-malli Modbus viestintä (PLC VFD) Esitellään laitteet Lopuksi Modbusia käytännössä Hammastankohissi Arkkitehtuuri
Hammastankohissin modernisointi Heikki Laitasalmi Loppudemossa Mitä oltiinkaan tekemässä V-malli Modbus viestintä (PLC VFD) Esitellään laitteet Lopuksi Modbusia käytännössä Hammastankohissi Arkkitehtuuri
Hammastankohissin modernisointi. Heikki Laitasalmi
 Hammastankohissin modernisointi Heikki Laitasalmi Väliraportissa Modernisoitavan hissin kuvaus (Paljon kuvia) Modernisoidun järjestelmän kuvaus Esitellään käytetyt komponentit Päämäärätöntä valitusta komponenttien
Hammastankohissin modernisointi Heikki Laitasalmi Väliraportissa Modernisoitavan hissin kuvaus (Paljon kuvia) Modernisoidun järjestelmän kuvaus Esitellään käytetyt komponentit Päämäärätöntä valitusta komponenttien
Hammastankohissin ohjausjärjestelmän modernisointi
 Hammastankohissin ohjausjärjestelmän modernisointi Työn tavoite Työn tavoitteena on modernisoida kiinteästi asennetun seitsemän kerroksinen hammastankohissin sähkömekaaninen ohjausjärjestelmä, käyttäen
Hammastankohissin ohjausjärjestelmän modernisointi Työn tavoite Työn tavoitteena on modernisoida kiinteästi asennetun seitsemän kerroksinen hammastankohissin sähkömekaaninen ohjausjärjestelmä, käyttäen
A11-02 Infrapunasuodinautomatiikka kameralle
 A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
Hissi - Tehtävä. Pisteytys. Tehtävän kuvaus
 Hissi - Tehtävä Kurssin läpipääsyn kannalta ei ole tarpeen suorittaa tätä harjoitusta loppuun toimivaan PLC toteutukseen asti. Alla pisteytys luvusta käy ilmi, että huomattavan määrän irtopisteitä voi
Hissi - Tehtävä Kurssin läpipääsyn kannalta ei ole tarpeen suorittaa tätä harjoitusta loppuun toimivaan PLC toteutukseen asti. Alla pisteytys luvusta käy ilmi, että huomattavan määrän irtopisteitä voi
Turvallisuusseminaari 30.11 1.11.2006 Silja-Line
 Turvallisuusseminaari 30.11 1.11.2006 Silja-Line Koneturvallisuus ohjausjärjestelmät ja niihin liittyvät tiedonsiirtojärjestelmät Toiminnallinen turvallisuus Standardi IEC 62061 Koneturvallisuus turvallisuuteen
Turvallisuusseminaari 30.11 1.11.2006 Silja-Line Koneturvallisuus ohjausjärjestelmät ja niihin liittyvät tiedonsiirtojärjestelmät Toiminnallinen turvallisuus Standardi IEC 62061 Koneturvallisuus turvallisuuteen
S14 09 Sisäpeltorobotti AS Automaatio ja systeemitekniikan projektityöt. Antti Kulpakko, Mikko Ikonen
 S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
OP-eTraderin käyttöopas
 OP-eTraderin käyttöopas Tämä käyttöopas on lyhennetty versio virallisesta englanninkielisestä käyttöoppaasta, joka löytyy etrader - sovelluksen Help-valikosta tai painamalla sovelluksessa F1 -näppäintä.
OP-eTraderin käyttöopas Tämä käyttöopas on lyhennetty versio virallisesta englanninkielisestä käyttöoppaasta, joka löytyy etrader - sovelluksen Help-valikosta tai painamalla sovelluksessa F1 -näppäintä.
KAUKOVALVONTAOHJELMA CARELAY CONTROL WPREMOTE
 KAUKOVALVONTAOHJELMA CARELAY CONTROL WPREMOTE Tämä kuvaus on tarkoitettu Carelay - tuotteen Waterpumps WP:n ja Power Factor::n sovelluskohteisiin. Yleistä Carelay Control Wpremote on kaukovalvontaohjelma,
KAUKOVALVONTAOHJELMA CARELAY CONTROL WPREMOTE Tämä kuvaus on tarkoitettu Carelay - tuotteen Waterpumps WP:n ja Power Factor::n sovelluskohteisiin. Yleistä Carelay Control Wpremote on kaukovalvontaohjelma,
Synco TM 700 säätimen peruskäyttöohjeet
 Synco TM 700 säätimen peruskäyttöohjeet Nämä ohjeet on tarkoitettu säätimen loppukäyttäjälle ja ne toimivat sellaisenaan säätimen mallista riippumatta. Säätimessä on kolme eri käyttäjätasoa, joista jokaisessa
Synco TM 700 säätimen peruskäyttöohjeet Nämä ohjeet on tarkoitettu säätimen loppukäyttäjälle ja ne toimivat sellaisenaan säätimen mallista riippumatta. Säätimessä on kolme eri käyttäjätasoa, joista jokaisessa
Matopeli C#:lla. Aram Abdulla Hassan. Ammattiopisto Tavastia. Opinnäytetyö
 Matopeli C#:lla Aram Abdulla Hassan Ammattiopisto Tavastia Opinnäytetyö Syksy 2014 1 Sisällysluettelo 1. Johdanto... 3 2. Projektin aihe: Matopeli C#:lla... 3 3. Projektissa käytetyt menetelmät ja työkalut
Matopeli C#:lla Aram Abdulla Hassan Ammattiopisto Tavastia Opinnäytetyö Syksy 2014 1 Sisällysluettelo 1. Johdanto... 3 2. Projektin aihe: Matopeli C#:lla... 3 3. Projektissa käytetyt menetelmät ja työkalut
TAITAJA 2007 ELEKTRONIIKKAFINAALI 31.01-02.02.07 KILPAILIJAN TEHTÄVÄT. Kilpailijan nimi / Nro:
 KILPAILIJAN TEHTÄVÄT Kilpailijan nimi / Nro: Tehtävän laatinut: Hannu Laurikainen, Deltabit Oy Kilpailutehtävä Kilpailijalle annetaan tehtävässä tarvittavat ohjelmakoodit. Tämä ohjelma on tehty laitteen
KILPAILIJAN TEHTÄVÄT Kilpailijan nimi / Nro: Tehtävän laatinut: Hannu Laurikainen, Deltabit Oy Kilpailutehtävä Kilpailijalle annetaan tehtävässä tarvittavat ohjelmakoodit. Tämä ohjelma on tehty laitteen
TIETOKONE JA TIETOVERKOT TYÖVÄLINEENÄ
 aaro.leikari@hotmail.com TIETOKONE JA TIETOVERKOT TYÖVÄLINEENÄ 25.01.2016 SISÄLLYS 1. Käyttöjärjestelmän asentaminen... 1 1.1 Windowsin asettamia laitteistovaatimuksia... 1 1.2 Windowsin asentaminen...
aaro.leikari@hotmail.com TIETOKONE JA TIETOVERKOT TYÖVÄLINEENÄ 25.01.2016 SISÄLLYS 1. Käyttöjärjestelmän asentaminen... 1 1.1 Windowsin asettamia laitteistovaatimuksia... 1 1.2 Windowsin asentaminen...
 1. Algoritmi 1.1 Sisällys Algoritmin määritelmä. Aiheen pariin johdatteleva esimerkki. Muuttujat ja operaatiot (sijoitus, aritmetiikka ja vertailu). Algoritmista ohjelmaksi. 1.2 Algoritmin määritelmä Ohjelmointi
1. Algoritmi 1.1 Sisällys Algoritmin määritelmä. Aiheen pariin johdatteleva esimerkki. Muuttujat ja operaatiot (sijoitus, aritmetiikka ja vertailu). Algoritmista ohjelmaksi. 1.2 Algoritmin määritelmä Ohjelmointi
KÄYTTÖOHJE HLS 35. Versio 1.1 25.5.2010 1 (6) TOIMINTOKAAVIO
 TOIMINTOKAAVIO") KÄYTTÖOHJE HLS 35 Versio 1.1 25.5.2010 1 (6) TOIMINTOKAAVIO HLS 35 säädin on suunniteltu erityisesti huonekohtaiseen lattialämmitys/jäähdytys käyttöön. Säätimen avulla on mahdollista hyödyntää lattiajäähdytystä
KÄYTTÖOHJE HLS 35 Versio 1.1 25.5.2010 1 (6) TOIMINTOKAAVIO HLS 35 säädin on suunniteltu erityisesti huonekohtaiseen lattialämmitys/jäähdytys käyttöön. Säätimen avulla on mahdollista hyödyntää lattiajäähdytystä
Liite 1: KualiKSB skenaariot ja PoC tulokset. 1. Palvelun kehittäjän näkökulma. KualiKSB. Sivu 1. Tilanne Vaatimus Ongelma jos vaatimus ei toteudu
 Liite 1: skenaariot ja PoC tulokset 1. Palvelun kehittäjän näkökulma Tilanne Vaatimus Ongelma jos vaatimus ei toteudu Palvelun uusi versio on Palveluiden kehittäminen voitava asentaa tuotantoon vaikeutuu
Liite 1: skenaariot ja PoC tulokset 1. Palvelun kehittäjän näkökulma Tilanne Vaatimus Ongelma jos vaatimus ei toteudu Palvelun uusi versio on Palveluiden kehittäminen voitava asentaa tuotantoon vaikeutuu
etunimi, sukunimi ja opiskelijanumero ja näillä
 Sisällys 1. Algoritmi Algoritmin määritelmä. Aiheen pariin johdatteleva esimerkki. ja operaatiot (sijoitus, aritmetiikka ja vertailu). Algoritmista ohjelmaksi. 1.1 1.2 Algoritmin määritelmä Ohjelmointi
Sisällys 1. Algoritmi Algoritmin määritelmä. Aiheen pariin johdatteleva esimerkki. ja operaatiot (sijoitus, aritmetiikka ja vertailu). Algoritmista ohjelmaksi. 1.1 1.2 Algoritmin määritelmä Ohjelmointi
Autotallin ovi - Tehtävänanto
 Autotallin ovi - Tehtävänanto Pisteytys (max 9p): 1 piste per läpi mennyt testi (max 7p) Reflektointitehtävä (max 2p yksi piste jos osaa vastata edes osittain ja toinen piste tyhjentävästä vastauksesta)
Autotallin ovi - Tehtävänanto Pisteytys (max 9p): 1 piste per läpi mennyt testi (max 7p) Reflektointitehtävä (max 2p yksi piste jos osaa vastata edes osittain ja toinen piste tyhjentävästä vastauksesta)
SEPA diary. Dokumentti: SEPA_diary_PK_HS.doc Päiväys: Projekti: AgileElephant Versio: V0.3
 AgilElephant SEPA Diary Petri Kalsi 55347A Heikki Salminen 51137K Tekijä: Petri Kalsi Omistaja: ElectricSeven Aihe: PK&HS Sivu 1 / 7 Dokumenttihistoria Revisiohistoria Revision päiväys: 29.11.2004 Seuraavan
AgilElephant SEPA Diary Petri Kalsi 55347A Heikki Salminen 51137K Tekijä: Petri Kalsi Omistaja: ElectricSeven Aihe: PK&HS Sivu 1 / 7 Dokumenttihistoria Revisiohistoria Revision päiväys: 29.11.2004 Seuraavan
Teollisuusautomaation standardit. Osio 6:
 Teollisuusautomaation standardit Osio 6 Osio 1: SESKOn Komitea SK 65: Teollisuusprosessien ohjaus Osio 2: Toiminnallinen turvallisuus: periaatteet Osio 3: Toiminnallinen turvallisuus: standardisarja IEC
Teollisuusautomaation standardit Osio 6 Osio 1: SESKOn Komitea SK 65: Teollisuusprosessien ohjaus Osio 2: Toiminnallinen turvallisuus: periaatteet Osio 3: Toiminnallinen turvallisuus: standardisarja IEC
Fin v2.0. VV4 Käsikirja
 Fin v2.0 Käsikirja www.safeline.se Sisältö Sisältö Esittely 1 Asennus 3 Merkit, jotka voidaan näyttää 4 Ohjelmointi 5 Ohjelmoinnin 1. vaihe 6 Ohjelmoinnin 2. vaihe 8 Ohjelmoinnin 3. vaihe 9 Ohjelmoinnin
Fin v2.0 Käsikirja www.safeline.se Sisältö Sisältö Esittely 1 Asennus 3 Merkit, jotka voidaan näyttää 4 Ohjelmointi 5 Ohjelmoinnin 1. vaihe 6 Ohjelmoinnin 2. vaihe 8 Ohjelmoinnin 3. vaihe 9 Ohjelmoinnin
Sähköpostitilin käyttöönotto. Versio 2.0
 Sähköpostitilin käyttöönotto Versio 2.0 Sivu 1 / 10 Jarno Parkkinen jarno@atflow.fi 1 Johdanto... 2 2 Thunderbird ohjelman lataus ja asennus... 3 3 Sähköpostitilin lisääminen ja käyttöönotto... 4 3.1 Tietojen
Sähköpostitilin käyttöönotto Versio 2.0 Sivu 1 / 10 Jarno Parkkinen jarno@atflow.fi 1 Johdanto... 2 2 Thunderbird ohjelman lataus ja asennus... 3 3 Sähköpostitilin lisääminen ja käyttöönotto... 4 3.1 Tietojen
XCRANE OMINAISUUDET KUUSI KULJETTAJA-PROFIILIA VENTTIILIEN SÄÄDÖT
 XCRANE OMINAISUUDET KUUSI KULJETTAJA-PROFIILIA Jokaiseen kuljettajaprofiiliin voi tallentaa omat säädöt seuraaville ominaisuuksille Venttiilin parametrit o Miniminopeus (ma) o Maksiminopeus (%) o Rampit
XCRANE OMINAISUUDET KUUSI KULJETTAJA-PROFIILIA Jokaiseen kuljettajaprofiiliin voi tallentaa omat säädöt seuraaville ominaisuuksille Venttiilin parametrit o Miniminopeus (ma) o Maksiminopeus (%) o Rampit
838E Hands Free Varashälytin
 838E Hands Free Varashälytin Huom! - Järjestelmän saa asentaa vain ammattilainen. - Älä anna laitteen tai vastaanottimen kastua. - Lue käyttöohje kokonaan ennen laitteen asennusta. - Tämän laitteen tarkoitus
838E Hands Free Varashälytin Huom! - Järjestelmän saa asentaa vain ammattilainen. - Älä anna laitteen tai vastaanottimen kastua. - Lue käyttöohje kokonaan ennen laitteen asennusta. - Tämän laitteen tarkoitus
CEM DT-3353 Pihtimittari
 CEM DT-3353 Pihtimittari Sivu 1/5 CEM DT-3353 Pihtimittari Ongelma Mittarin ohjelmisto ilmoittaa NO DATA vaikka tiedonsiirtokaapeli on kytketty tietokoneen ja mittarin välille, mittarissa on virta päällä
CEM DT-3353 Pihtimittari Sivu 1/5 CEM DT-3353 Pihtimittari Ongelma Mittarin ohjelmisto ilmoittaa NO DATA vaikka tiedonsiirtokaapeli on kytketty tietokoneen ja mittarin välille, mittarissa on virta päällä
S11-09 Control System for an. Autonomous Household Robot Platform
 S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
Kuva 1. Jokaisen tavallisen kuvan tasotyökalussa näkyy vain yksi taso, tässä nimellä tausta.
 Gimp alkeet XII 9 luokan ATK-työt/HaJa Sivu 1 / 6 GIMP:in tasotyökalu Lue ensin nämä ohjeet! Harjoitus lopussa! GIMP:in tasotyökalu on nimensä mukaisesti työkalu, jolla hallitaan tasoja, niiden läpinäkyvyyttä,
Gimp alkeet XII 9 luokan ATK-työt/HaJa Sivu 1 / 6 GIMP:in tasotyökalu Lue ensin nämä ohjeet! Harjoitus lopussa! GIMP:in tasotyökalu on nimensä mukaisesti työkalu, jolla hallitaan tasoja, niiden läpinäkyvyyttä,
1 Muutokset piirilevylle
 1 Muutokset piirilevylle Seuraavat muutokset täytyvät olla piirilevylle tehtynä, jotta tätä käyttöohjetta voidaan käyttää. Jumppereiden JP5, JP6, JP7, sekä JP8 ja C201 väliltä puuttuvat signaalivedot on
1 Muutokset piirilevylle Seuraavat muutokset täytyvät olla piirilevylle tehtynä, jotta tätä käyttöohjetta voidaan käyttää. Jumppereiden JP5, JP6, JP7, sekä JP8 ja C201 väliltä puuttuvat signaalivedot on
S11-04 Kompaktikamerat stereokamerajärjestelmässä. Projektisuunnitelma
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-17 Ikäihmisten kotona asumista tukevien järjestelmien kehittäminen Väliraportti Joonas Aalto-Setälä Ossi Malaska 1. Projektin tavoitteet Projektin
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-17 Ikäihmisten kotona asumista tukevien järjestelmien kehittäminen Väliraportti Joonas Aalto-Setälä Ossi Malaska 1. Projektin tavoitteet Projektin
Harjoitustyö 3 - Millosemeni
 Harjoitustyö 3 - Millosemeni Tampereen kaupunki tarjoaa avoin data -sivuillaan Tampereen joukkoliikenteen aikataulut, reitit sekä rajapinnan joukkoliikenteen reaaliaikaiseen seurantaan. Näinpä erilaisille
Harjoitustyö 3 - Millosemeni Tampereen kaupunki tarjoaa avoin data -sivuillaan Tampereen joukkoliikenteen aikataulut, reitit sekä rajapinnan joukkoliikenteen reaaliaikaiseen seurantaan. Näinpä erilaisille
SÄHKÖKÄYTÖN EMULOINTI SIMULINK-DSPACE-M1 -YMPÄRISTÖSSÄ
 Sillanpää Teemu SÄHKÖKÄYTÖN EMULOINTI SIMULINK-DSPACE-M1 -YMPÄRISTÖSSÄ Seminaarityön loppuraportti, joka on jätetty tarkastettavaksi kurssin Sulautettujen järjestelmien seminaarikurssi osasuorituksena.
Sillanpää Teemu SÄHKÖKÄYTÖN EMULOINTI SIMULINK-DSPACE-M1 -YMPÄRISTÖSSÄ Seminaarityön loppuraportti, joka on jätetty tarkastettavaksi kurssin Sulautettujen järjestelmien seminaarikurssi osasuorituksena.
ABB aurinkosähköinvertterit Pikaohje PMU laajennuskortti
 ABB aurinkosähköinvertterit Pikaohje PMU laajennuskortti Tämän pikaohjeen lisäksi on turvallisuus ja asennustietojen ohjeet luettava ja niitä on noudatettava. Tekninen dokumentaatio, ja hallintaohjelmisto
ABB aurinkosähköinvertterit Pikaohje PMU laajennuskortti Tämän pikaohjeen lisäksi on turvallisuus ja asennustietojen ohjeet luettava ja niitä on noudatettava. Tekninen dokumentaatio, ja hallintaohjelmisto
Mikä on EN81-28? Jumittunut hissiin?
 Mikä on EN81-28? Jumittunut hissiin? Me voimme auttaa! Hisselektronik kehittää ja valmistaa elektroniikkaa hissiteollisuudelle. Tuotteet ovat pääasiassa hissipuhelimia sekä langalliseen puhelinverkkoon
Mikä on EN81-28? Jumittunut hissiin? Me voimme auttaa! Hisselektronik kehittää ja valmistaa elektroniikkaa hissiteollisuudelle. Tuotteet ovat pääasiassa hissipuhelimia sekä langalliseen puhelinverkkoon
2 Konekieli, aliohjelmat, keskeytykset
 ITK145 Käyttöjärjestelmät, kesä 2005 Tenttitärppejä Tässä on lueteltu suurin piirtein kaikki vuosina 2003-2005 kurssin tenteissä kysytyt kysymykset, ja mukana on myös muutama uusi. Jokaisessa kysymyksessä
ITK145 Käyttöjärjestelmät, kesä 2005 Tenttitärppejä Tässä on lueteltu suurin piirtein kaikki vuosina 2003-2005 kurssin tenteissä kysytyt kysymykset, ja mukana on myös muutama uusi. Jokaisessa kysymyksessä
Ohjeita Siemens Step7, Omron CX Programmer käyttöön
 Ohjeita Siemens Step7, Omron CX Programmer käyttöön Sisällysluettelo 1 Siemens Step7 Manager...1 1.1 Laitteistomäärittely...1 1.2 Ohjelmalohkon luonti ja toteutus...2 1.3 Ohjelman kutsu...3 2 CX-Programmer...4
Ohjeita Siemens Step7, Omron CX Programmer käyttöön Sisällysluettelo 1 Siemens Step7 Manager...1 1.1 Laitteistomäärittely...1 1.2 Ohjelmalohkon luonti ja toteutus...2 1.3 Ohjelman kutsu...3 2 CX-Programmer...4
SAC RDS Futurline MAX Tupla-robotin ohjeet näytteenottoon ja päivämaidon lähetykseen
 RDS - ohjeet 1 (18) SAC RDS Futurline MAX Tupla-robotin ohjeet näytteenottoon ja päivämaidon lähetykseen Näytteenoton aloittaminen Shuttlen säädöt robotilla Telineen vaihto Näytteenoton lopettaminen Näyteraportin
RDS - ohjeet 1 (18) SAC RDS Futurline MAX Tupla-robotin ohjeet näytteenottoon ja päivämaidon lähetykseen Näytteenoton aloittaminen Shuttlen säädöt robotilla Telineen vaihto Näytteenoton lopettaminen Näyteraportin
S12-11. Portaalinosturi AS-0.3200. Projektisuunnitelma 2012. Oleg Kovalev
 S12-11 Portaalinosturi AS-0.3200 Projektisuunnitelma 2012 Oleg Kovalev Sisällys 1. Työn tavoite... 3 2. Projektin osa-alueet... 3 2.1. Suunnittelu... 3 2.2. Komponenttien hankinta... 3 2.3. Valmistus...
S12-11 Portaalinosturi AS-0.3200 Projektisuunnitelma 2012 Oleg Kovalev Sisällys 1. Työn tavoite... 3 2. Projektin osa-alueet... 3 2.1. Suunnittelu... 3 2.2. Komponenttien hankinta... 3 2.3. Valmistus...
TOIMINNALLINEN MÄÄRITTELY MS
 TOIMINNALLINEN MÄÄRITTELY 11.11.2015 MS YLEISTÄ 1/2 jäsennelty etenee yleiskuvauksesta yksityiskohtiin kieliasultaan selkeä kuvaa myös tulevan järjestelmän ympäristöä tarpeellisella tarkkuudella kuvaa
TOIMINNALLINEN MÄÄRITTELY 11.11.2015 MS YLEISTÄ 1/2 jäsennelty etenee yleiskuvauksesta yksityiskohtiin kieliasultaan selkeä kuvaa myös tulevan järjestelmän ympäristöä tarpeellisella tarkkuudella kuvaa
Ohjelmiston testaus ja laatu. Ohjelmistotekniikka elinkaarimallit
 Ohjelmiston testaus ja laatu Ohjelmistotekniikka elinkaarimallit Vesiputousmalli - 1 Esitutkimus Määrittely mikä on ongelma, onko valmista ratkaisua, kustannukset, reunaehdot millainen järjestelmä täyttää
Ohjelmiston testaus ja laatu Ohjelmistotekniikka elinkaarimallit Vesiputousmalli - 1 Esitutkimus Määrittely mikä on ongelma, onko valmista ratkaisua, kustannukset, reunaehdot millainen järjestelmä täyttää
Elektroninen ohjaus helposti
 Elektroninen ohjaus helposti Koneiden vankka ja yksinkertainen ohjaus älykkään elektroniikan avulla IQAN-TOC2 oikotie tulevaisuuteen Helppo määritellä Helppo asentaa Helppo säätää Helppo diagnosoida Vankka
Elektroninen ohjaus helposti Koneiden vankka ja yksinkertainen ohjaus älykkään elektroniikan avulla IQAN-TOC2 oikotie tulevaisuuteen Helppo määritellä Helppo asentaa Helppo säätää Helppo diagnosoida Vankka
VSP webmail palvelun ka yttö öhje
 VSP webmail palvelun ka yttö öhje Kirjaudu webmailiin osoitteessa https://webmail.net.vsp.fi Webmailin kirjautumissivu, kirjoita sähköpostiosoitteesi ja salasanasi: Sähköpostin päänäkymä: 1: Kansiolistaus
VSP webmail palvelun ka yttö öhje Kirjaudu webmailiin osoitteessa https://webmail.net.vsp.fi Webmailin kirjautumissivu, kirjoita sähköpostiosoitteesi ja salasanasi: Sähköpostin päänäkymä: 1: Kansiolistaus
TITANIC TEMPPU, vaan ei karille
 TITANIC TEMPPU, vaan ei karille Mikko Mäkelä Tuomo Rintamäki 17/10/10 Helsinki Metropolia University of Applied Sciences 1 Metropolia- ammattikorkeakoulusta Suomen suurin ammattikorkeakoulu, joka aloitti
TITANIC TEMPPU, vaan ei karille Mikko Mäkelä Tuomo Rintamäki 17/10/10 Helsinki Metropolia University of Applied Sciences 1 Metropolia- ammattikorkeakoulusta Suomen suurin ammattikorkeakoulu, joka aloitti
LABORAATIOSELOSTUSTEN OHJE H. Honkanen
 LABORAATIOSELOSTUSTEN OHJE H. Honkanen Tämä ohje täydentää ja täsmentää osaltaan selostuskäytäntöä laboraatioiden osalta. Yleinen ohje työselostuksista löytyy intranetista, ohjeen on laatinut Eero Soininen
LABORAATIOSELOSTUSTEN OHJE H. Honkanen Tämä ohje täydentää ja täsmentää osaltaan selostuskäytäntöä laboraatioiden osalta. Yleinen ohje työselostuksista löytyy intranetista, ohjeen on laatinut Eero Soininen
PM10OUT2A-kortti. Ohje
 PM10OUT2A-kortti Ohje Dokumentin ID 6903 V3 13.4.2015 Sisällysluettelo Sisällysluettelo... 2 Esittely... 3 Kortti ja rekisterit... 3 Lähtöviestit... 4 Signaalien kytkeminen... 4 Käyttö... 4 Asetusten tekeminen...
PM10OUT2A-kortti Ohje Dokumentin ID 6903 V3 13.4.2015 Sisällysluettelo Sisällysluettelo... 2 Esittely... 3 Kortti ja rekisterit... 3 Lähtöviestit... 4 Signaalien kytkeminen... 4 Käyttö... 4 Asetusten tekeminen...
Käyttöohje. Energent MagiCAD plugin
 Käyttöohje Energent MagiCAD plugin Sisältö 1. Yleistä 1 Dokumentin sisältö... 1 Ohjelman asennus... 1 Vaadittavat ohjelmistot... 1 Asennus... 1 Ohjelman käynnistys... 2 2. Toiminnallisuudet 3 Insert Energent
Käyttöohje Energent MagiCAD plugin Sisältö 1. Yleistä 1 Dokumentin sisältö... 1 Ohjelman asennus... 1 Vaadittavat ohjelmistot... 1 Asennus... 1 Ohjelman käynnistys... 2 2. Toiminnallisuudet 3 Insert Energent
Tik-76.115 Tietojenkäsittelyopin ohjelmatyö Tietotekniikan osasto Teknillinen korkeakoulu. LiKe Liiketoiminnan kehityksen tukiprojekti
 Tik-76.115 Tietojenkäsittelyopin ohjelmatyö Tietotekniikan osasto Teknillinen korkeakoulu TESTIRAPORTTI LiKe Liiketoiminnan kehityksen tukiprojekti Versio: 1.1 Tila: hyväksytty Päivämäärä: 13.2.2001 Tekijä:
Tik-76.115 Tietojenkäsittelyopin ohjelmatyö Tietotekniikan osasto Teknillinen korkeakoulu TESTIRAPORTTI LiKe Liiketoiminnan kehityksen tukiprojekti Versio: 1.1 Tila: hyväksytty Päivämäärä: 13.2.2001 Tekijä:
GSRELE ohjeet. Yleistä
 GSRELE ohjeet Yleistä GSM rele ohjaa Nokia 3310 puhelimen avulla releitä, mittaa lämpötilaa, tekee etähälytyksiä GSM-verkon avulla. Kauko-ohjauspuhelin voi olla mikä malli tahansa tai tavallinen lankapuhelin.
GSRELE ohjeet Yleistä GSM rele ohjaa Nokia 3310 puhelimen avulla releitä, mittaa lämpötilaa, tekee etähälytyksiä GSM-verkon avulla. Kauko-ohjauspuhelin voi olla mikä malli tahansa tai tavallinen lankapuhelin.
ABB Drives and Controls, 26.05.2015 Koneenrakentajan ja laitetoimittajan yhteistoiminta toiminnallisen turvallisuuden varmistamisessa
 ABB Drives and Controls, 26.05.2015 Koneenrakentajan ja laitetoimittajan yhteistoiminta toiminnallisen turvallisuuden varmistamisessa Sisältö 1. Koneenrakentajan haasteita koneiden turvallistamisessa 2.
ABB Drives and Controls, 26.05.2015 Koneenrakentajan ja laitetoimittajan yhteistoiminta toiminnallisen turvallisuuden varmistamisessa Sisältö 1. Koneenrakentajan haasteita koneiden turvallistamisessa 2.
Pikaohje Aplisens APIS type 1X0 ja 2XO
 Pikaohje Aplisens APIS type 1X0 ja 2XO Koivupuistontie 26, 01510, Vantaa www.saato.fi, sales@saato.fi, 09-759 7850 Sisällys 1. Yleistä...3 2. Parametritilan toiminnot...4 3. Käyttöönotto pikaohje...5 1.
Pikaohje Aplisens APIS type 1X0 ja 2XO Koivupuistontie 26, 01510, Vantaa www.saato.fi, sales@saato.fi, 09-759 7850 Sisällys 1. Yleistä...3 2. Parametritilan toiminnot...4 3. Käyttöönotto pikaohje...5 1.
S09 04 Kohteiden tunnistaminen 3D datasta
 AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
Flamco www.flamcogroup.com
 ENA 7-30 liite Asennus- ja käyttöohjeiden Flamco www.flamcogroup.com Sisältö Sivu 1 Ensikäyttö 3 1.1 ENA 7-30:n käyttöönotto 3 1.2 Käyttöönottoparametrit 3 2 Laite- ja parametrivalikossa olevat kohteet
ENA 7-30 liite Asennus- ja käyttöohjeiden Flamco www.flamcogroup.com Sisältö Sivu 1 Ensikäyttö 3 1.1 ENA 7-30:n käyttöönotto 3 1.2 Käyttöönottoparametrit 3 2 Laite- ja parametrivalikossa olevat kohteet
1 Tekniset tiedot: 2 Asennus: Asennus. Liitännät
 Viitteet 000067 - Fi ASENNUS ohje inteo Soliris Sensor RTS Soliris Sensor RTS on aurinko- & tuulianturi aurinko- & tuuliautomatiikalla varustettuihin Somfy Altus RTS- ja Orea RTS -moottoreihin. Moottorit
Viitteet 000067 - Fi ASENNUS ohje inteo Soliris Sensor RTS Soliris Sensor RTS on aurinko- & tuulianturi aurinko- & tuuliautomatiikalla varustettuihin Somfy Altus RTS- ja Orea RTS -moottoreihin. Moottorit
Power Steering for ATV
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Power Steering for ATV 27.1.2014 Juuso Meriläinen Antti Alakiikonen Aleksi Vulli Meriläinen, Vulli, Alakiikonen 1/6 Projektin tavoite Projektityössä
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Power Steering for ATV 27.1.2014 Juuso Meriläinen Antti Alakiikonen Aleksi Vulli Meriläinen, Vulli, Alakiikonen 1/6 Projektin tavoite Projektityössä
Teollisuusautomaation standardit Osio 9
 Teollisuusautomaation standardit Osio 9 Osio 1: SESKOn Komitea SK 65: Teollisuusprosessien ohjaus Osio 2: Toiminnallinen turvallisuus: periaatteet Osio 3: Toiminnallinen turvallisuus: standardisarja IEC
Teollisuusautomaation standardit Osio 9 Osio 1: SESKOn Komitea SK 65: Teollisuusprosessien ohjaus Osio 2: Toiminnallinen turvallisuus: periaatteet Osio 3: Toiminnallinen turvallisuus: standardisarja IEC
1. Oppimisen ohjaamisen osaamisalue. o oppijaosaaminen o ohjausteoriaosaaminen o ohjausosaaminen. 2. Toimintaympäristöjen kehittämisen osaamisalue
 Sivu 1 / 5 Tässä raportissa kuvaan Opintojen ohjaajan koulutuksessa oppimaani suhteessa koulutukselle asetettuihin tavoitteisiin ja osaamisalueisiin. Jokaisen osaamisalueen kohdalla pohdin, miten saavutin
Sivu 1 / 5 Tässä raportissa kuvaan Opintojen ohjaajan koulutuksessa oppimaani suhteessa koulutukselle asetettuihin tavoitteisiin ja osaamisalueisiin. Jokaisen osaamisalueen kohdalla pohdin, miten saavutin
Made for efficient farmers
 Made for efficient farmers ISOMATCH TELLUS GO, work easy. be in control. Maataloudessa tarvitaan tehokkuutta. Korkeampia satoja vähemmällä vaivalla ja pienemmillä kustannuksilla. Se tarkoittaa myös tuotantopanosten
Made for efficient farmers ISOMATCH TELLUS GO, work easy. be in control. Maataloudessa tarvitaan tehokkuutta. Korkeampia satoja vähemmällä vaivalla ja pienemmillä kustannuksilla. Se tarkoittaa myös tuotantopanosten
Asko Ikävalko, k0201291 22.2.2004 TP02S-D. Ohjelmointi (C-kieli) Projektityö. Työn valvoja: Olli Hämäläinen
 Projektityö. Työn valvoja: Olli Hämäläinen") Asko Ikävalko, k0201291 22.2.2004 TP02S-D Ohjelmointi (C-kieli) Projektityö Työn valvoja: Olli Hämäläinen Asko Ikävalko LOPPURAPORTTI 1(11) Ratkaisun kuvaus Käytetyt tiedostot Tietuerakenteet Onnistuin
Asko Ikävalko, k0201291 22.2.2004 TP02S-D Ohjelmointi (C-kieli) Projektityö Työn valvoja: Olli Hämäläinen Asko Ikävalko LOPPURAPORTTI 1(11) Ratkaisun kuvaus Käytetyt tiedostot Tietuerakenteet Onnistuin
PEM1123/ 410993A. Asennus- ja käyttöohje SW/S2.5 viikkokello. ABB i-bus KNX. SW/S2.5 Viikkokello
 PEM1123/ 410993A Asennus- ja käyttöohje SW/S2.5 viikkokello ABB i-bus KNX SW/S2.5 Viikkokello Sisällysluettelo 1.0 Kuvaus 1.1 Laitteen käyttö...3 1.2 Ominaisuudet...3 1.3 Näppäimet ja osat...4 1.4 Tekniset
PEM1123/ 410993A Asennus- ja käyttöohje SW/S2.5 viikkokello ABB i-bus KNX SW/S2.5 Viikkokello Sisällysluettelo 1.0 Kuvaus 1.1 Laitteen käyttö...3 1.2 Ominaisuudet...3 1.3 Näppäimet ja osat...4 1.4 Tekniset
Safety Integrated -turvatekniset perusratkaisut. Siemens Automation
 Safety Integrated -turvatekniset perusratkaisut Siemens Automation Itsenäisen koneen turvaratkaisu toteutetaan releellä, konetta ei ole kytketty väylään Select language Exit Sivu 2 Industry Sector Turvareleet
Safety Integrated -turvatekniset perusratkaisut Siemens Automation Itsenäisen koneen turvaratkaisu toteutetaan releellä, konetta ei ole kytketty väylään Select language Exit Sivu 2 Industry Sector Turvareleet
Tuplaturvan tilaus ja asennusohje
 Tuplaturvan tilaus ja asennusohje 1. Kirjaudu lähiverkkokauppaan omilla tunnuksillasi tai luo itsellesi käyttäjätunnus rekisteröitymällä Lähiverkkokaupan käyttäjäksi. a. Käyttäjätunnus on aina sähköpostiosoitteesi.
Tuplaturvan tilaus ja asennusohje 1. Kirjaudu lähiverkkokauppaan omilla tunnuksillasi tai luo itsellesi käyttäjätunnus rekisteröitymällä Lähiverkkokaupan käyttäjäksi. a. Käyttäjätunnus on aina sähköpostiosoitteesi.
Phantom / H3-3D Gimbal Kalibrointiohjeet. Aloitus:
 Phantom / H3-3D Gimbal Kalibrointiohjeet - Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset - IMU kalibrointi
Phantom / H3-3D Gimbal Kalibrointiohjeet - Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset - IMU kalibrointi
11/20: Konepelti auki
 Ohjelmointi 1 / syksy 2007 11/20: Konepelti auki Paavo Nieminen nieminen@jyu.fi Tietotekniikan laitos Informaatioteknologian tiedekunta Jyväskylän yliopisto Ohjelmointi 1 / syksy 2007 p.1/11 Tämän luennon
Ohjelmointi 1 / syksy 2007 11/20: Konepelti auki Paavo Nieminen nieminen@jyu.fi Tietotekniikan laitos Informaatioteknologian tiedekunta Jyväskylän yliopisto Ohjelmointi 1 / syksy 2007 p.1/11 Tämän luennon
Timmi 4.1. sähköinen asiointi ohje hakijalle
 Tuusulan kunta Päivitetty 29.2.2016 Kasvatus- ja sivistystoimi Timmi 4.1. sähköinen asiointi ohje hakijalle Sisällys Rekisteröityminen yksityishenkilönä... 2 Organisaation (rekisteröityneen seuran ja yhdistyksen)
Tuusulan kunta Päivitetty 29.2.2016 Kasvatus- ja sivistystoimi Timmi 4.1. sähköinen asiointi ohje hakijalle Sisällys Rekisteröityminen yksityishenkilönä... 2 Organisaation (rekisteröityneen seuran ja yhdistyksen)
TALOMAT Light. asennus- ja käyttöohje T104
 TALOMAT Light asennus- ja käyttöohje T104 Talomat Light -järjestelmä sisältää seuraavat komponentit: ohjausyksikkö 1 kpl kytkinsovitin 2 kpl 4-os talomat -painike 1 kpl 1-os kytkimen asennuskehys 1 kpl
TALOMAT Light asennus- ja käyttöohje T104 Talomat Light -järjestelmä sisältää seuraavat komponentit: ohjausyksikkö 1 kpl kytkinsovitin 2 kpl 4-os talomat -painike 1 kpl 1-os kytkimen asennuskehys 1 kpl
Yksikkötestaus. import org.junit.test; public class LaskinTest public void testlaskimenluonti() { Laskin laskin = new Laskin(); } }
 { Laskin laskin = new Laskin(); } }") Yksikkötestauksella tarkoitetaan lähdekoodiin kuuluvien yksittäisten osien testaamista. Termi yksikkö viittaa ohjelman pienimpiin mahdollisiin testattaviin toiminnallisuuksiin, kuten olion tarjoamiin metodeihin.
Yksikkötestauksella tarkoitetaan lähdekoodiin kuuluvien yksittäisten osien testaamista. Termi yksikkö viittaa ohjelman pienimpiin mahdollisiin testattaviin toiminnallisuuksiin, kuten olion tarjoamiin metodeihin.
Nimettömien tietojen lähettäminen Lenovolle
 Nimettömien tietojen lähettäminen Lenovolle Sisältö Nimettömien tietojen lähettäminen Lenovolle... 1 Harmony... 1 Lenovo Companion 3.0... 2 Lenovo Customer Engagement Service... 3 Lenovo Experience Improvement
Nimettömien tietojen lähettäminen Lenovolle Sisältö Nimettömien tietojen lähettäminen Lenovolle... 1 Harmony... 1 Lenovo Companion 3.0... 2 Lenovo Customer Engagement Service... 3 Lenovo Experience Improvement
Talotekniikan toiminnanvarmistus. Säätö ja toiminnanvarmistus ohjekortti alustus Tomi Jäävirta Mikko Niskala
 Talotekniikan toiminnanvarmistus Säätö ja toiminnanvarmistus ohjekortti alustus Tomi Jäävirta Mikko Niskala Tarkoitus Osa Kuivaketju10 projektia Sisältöä talotekniikan toiminnanvarmistus ohjekorttiin.
Talotekniikan toiminnanvarmistus Säätö ja toiminnanvarmistus ohjekortti alustus Tomi Jäävirta Mikko Niskala Tarkoitus Osa Kuivaketju10 projektia Sisältöä talotekniikan toiminnanvarmistus ohjekorttiin.
Taitaja 2013, Mekatroniikka Turvalaitteet
 Taitaja 2013, Mekatroniikka Turvalaitteet Versio Tekijä Tarkastaja 1.0 PR 30.01.2013 1.1 AK 4.2.2013 1.2 PR 28.2.2013 1.3 AK 1.3.2013 Tulostettu: 2.5.2013 22:28 1(7) SÄLLYSLUETTELO 1. Perustiedot 3 1.1.
Taitaja 2013, Mekatroniikka Turvalaitteet Versio Tekijä Tarkastaja 1.0 PR 30.01.2013 1.1 AK 4.2.2013 1.2 PR 28.2.2013 1.3 AK 1.3.2013 Tulostettu: 2.5.2013 22:28 1(7) SÄLLYSLUETTELO 1. Perustiedot 3 1.1.
edocker PUBLISH! -paketinhallinnan käyttöohje 9/2015
 edocker PUBLISH! -paketinhallinnan käyttöohje 9/2015 Uusien EDTPLIB- ja PDF -pakettien vienti ohjatulla toiminnolla...3 Tiedoston tarkistus...3 Kohdejulkaisun valinta... 4 Numeron tiedot... 5 Yhteenveto...6
edocker PUBLISH! -paketinhallinnan käyttöohje 9/2015 Uusien EDTPLIB- ja PDF -pakettien vienti ohjatulla toiminnolla...3 Tiedoston tarkistus...3 Kohdejulkaisun valinta... 4 Numeron tiedot... 5 Yhteenveto...6
Oliosuunnitteluesimerkki: Yrityksen palkanlaskentajärjestelmä
 Oliosuunnitteluesimerkki: Yrityksen palkanlaskentajärjestelmä Matti Luukkainen 10.12.2009 Tässä esitetty esimerkki on mukaelma ja lyhennelmä Robert Martinin kirjasta Agile and Iterative Development löytyvästä
Oliosuunnitteluesimerkki: Yrityksen palkanlaskentajärjestelmä Matti Luukkainen 10.12.2009 Tässä esitetty esimerkki on mukaelma ja lyhennelmä Robert Martinin kirjasta Agile and Iterative Development löytyvästä
Kompaktisäädin KNX. Kompaktisäädin KNX
 Sertifioitu KNX, S-tilan laite Toiminta-alue.. Pa (mittausalue..5 Pa) Käyntiaika 5s Käyttöjännite AC 24V GDB8.E/KN: vääntömomentti 5 Nm -> pellin ala n..8 m2 GLB8.E/KN: vääntömomentti Nm -> pellin ala
Sertifioitu KNX, S-tilan laite Toiminta-alue.. Pa (mittausalue..5 Pa) Käyntiaika 5s Käyttöjännite AC 24V GDB8.E/KN: vääntömomentti 5 Nm -> pellin ala n..8 m2 GLB8.E/KN: vääntömomentti Nm -> pellin ala
Projektisuunnitelma Viulu
 Projektisuunnitelma Viulu Kuusela Johannes Sjöblom Teemu Suominen Osma Ohjelmistotuotantoprojekti Helsinki 23.9.2004 HELSINGIN YLIOPISTO Tietojenkäsittelytieteen laitos Versiohistoria Päivämäärä Versio
Projektisuunnitelma Viulu Kuusela Johannes Sjöblom Teemu Suominen Osma Ohjelmistotuotantoprojekti Helsinki 23.9.2004 HELSINGIN YLIOPISTO Tietojenkäsittelytieteen laitos Versiohistoria Päivämäärä Versio
Yksityisautoilijoille ABAX AJOPÄIVÄKIRJA
 The difference is ABAX Yksityisautoilijoille ABAX AJOPÄIVÄKIRJA The difference is ABAX 2 The difference is ABAX ABAX SÄHKÖINEN AJOPÄIVÄKIRJA Tähän esitteeseen on koottu vastauksia kysymyksiin, jotka liittyvät
The difference is ABAX Yksityisautoilijoille ABAX AJOPÄIVÄKIRJA The difference is ABAX 2 The difference is ABAX ABAX SÄHKÖINEN AJOPÄIVÄKIRJA Tähän esitteeseen on koottu vastauksia kysymyksiin, jotka liittyvät
Sähköisen äänestyksen pilotti
 08.02.2008 1 (26) Käyttötapausmalli Oikeusministeriö Vaalitietojärjestelmät 08.02.2008 2 (26) 1 Käyttötapaukset...3 1.1 Käyttötapaus: Vaalin perustaminen...4 1.1.1 Käyttötapauksen sanallinen kuvaus...4
08.02.2008 1 (26) Käyttötapausmalli Oikeusministeriö Vaalitietojärjestelmät 08.02.2008 2 (26) 1 Käyttötapaukset...3 1.1 Käyttötapaus: Vaalin perustaminen...4 1.1.1 Käyttötapauksen sanallinen kuvaus...4
Projektisuunnitelma. (välipalautukseen muokattu versio) Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus
 Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus") Projektisuunnitelma (välipalautukseen muokattu versio) Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus Ville Toiviainen Tomi Tuovinen Lauri af Heurlin Tavoite Projektin tarkoituksena
Projektisuunnitelma (välipalautukseen muokattu versio) Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus Ville Toiviainen Tomi Tuovinen Lauri af Heurlin Tavoite Projektin tarkoituksena
Power Steering for ATV
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Power Steering for ATV 15.1. - Loppuraportti Työn valvoja: Ville Matikainen Projektin tekijät: Juuso Meriläinen Antti Alakiikonen Aleksi Vulli Juuso
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Power Steering for ATV 15.1. - Loppuraportti Työn valvoja: Ville Matikainen Projektin tekijät: Juuso Meriläinen Antti Alakiikonen Aleksi Vulli Juuso
Tutustuminen tuotantolinjastoon
 Tutustuminen tuotantolinjastoon Hands-on harjoitus 1 1 Tehtävät 2 Tuotantolinjasto yleisesti 2.1 Asemien käsitteleminen (Kuva 1) 2.2 Tuotantolinjaston toiminta 3 Jakeluaseman kuvaus 4 Testausaseman kuvaus
Tutustuminen tuotantolinjastoon Hands-on harjoitus 1 1 Tehtävät 2 Tuotantolinjasto yleisesti 2.1 Asemien käsitteleminen (Kuva 1) 2.2 Tuotantolinjaston toiminta 3 Jakeluaseman kuvaus 4 Testausaseman kuvaus
Käyttöohje HERE Maps. 1.0. painos FI
 Käyttöohje HERE Maps 1.0. painos FI HERE Maps HERE Maps näyttää lähellä olevat kohteet ja opastaa sinut perille. Voit etsiä kaupunkeja, katuja ja palveluja löytää perille tarkkojen reittiohjeiden avulla
Käyttöohje HERE Maps 1.0. painos FI HERE Maps HERE Maps näyttää lähellä olevat kohteet ja opastaa sinut perille. Voit etsiä kaupunkeja, katuja ja palveluja löytää perille tarkkojen reittiohjeiden avulla
Teollisuusautomaation standardit. Osio 2:
 Teollisuusautomaation standardit Osio 2 Osio 1: SESKOn komitea SK 65: Teollisuusprosessien ohjaus Osio 2: Toiminnallinen turvallisuus: periaatteet Osio 3: Toiminnallinen turvallisuus: standardisarja IEC
Teollisuusautomaation standardit Osio 2 Osio 1: SESKOn komitea SK 65: Teollisuusprosessien ohjaus Osio 2: Toiminnallinen turvallisuus: periaatteet Osio 3: Toiminnallinen turvallisuus: standardisarja IEC
iloq Privus - Ohjelmointiopas
 iloq Privus - Ohjelmointiopas Hyvä Asiakkaamme, 1 Aloitusopas 4-5 1.1 Tässä oppaassa käytettävät symbolit 4 Kiitos, että olette valinneet tämän iloq tuotteen. Tutustu huolellisesti tähän ohjelmointioppaaseen
iloq Privus - Ohjelmointiopas Hyvä Asiakkaamme, 1 Aloitusopas 4-5 1.1 Tässä oppaassa käytettävät symbolit 4 Kiitos, että olette valinneet tämän iloq tuotteen. Tutustu huolellisesti tähän ohjelmointioppaaseen
Väylät. Prosessorin tie ulkomaailmaan Pienissä järjestelmissä vain yksi väylä. Osoite, data ja ohjaussignaalit Prosessori ainoa herra (master)
") Prosessorin tie ulkomaailmaan Pienissä järjestelmissä vain yksi väylä Prosessoriväylä Osoite, data ja ohjaussignaalit Prosessori ainoa herra (master) Suuremmissa erillisiä väyliä Muistiväylä Oheislaiteväylät
Prosessorin tie ulkomaailmaan Pienissä järjestelmissä vain yksi väylä Prosessoriväylä Osoite, data ja ohjaussignaalit Prosessori ainoa herra (master) Suuremmissa erillisiä väyliä Muistiväylä Oheislaiteväylät
Projektisuunnitelma: Vesipistekohtainen veden kulutuksen seuranta, syksy Mikko Kyllönen Matti Marttinen Vili Tuomisaari
 Projektisuunnitelma: Vesipistekohtainen veden kulutuksen seuranta, syksy 2015 Mikko Kyllönen Matti Marttinen Vili Tuomisaari Projektin tavoite Tämän projektin tavoitteena on kehittää prototyyppi järjestelmästä,
Projektisuunnitelma: Vesipistekohtainen veden kulutuksen seuranta, syksy 2015 Mikko Kyllönen Matti Marttinen Vili Tuomisaari Projektin tavoite Tämän projektin tavoitteena on kehittää prototyyppi järjestelmästä,
DNA Netti. Sisältö. DNA Netti - Käyttöohje v.0.1
 DNA Netti DNA Netti on Mokkuloiden yhteysohjelma. Ohjelman avulla voit hallita Mokkulan asetuksia sekä luoda yhteyden internetiin Mokkulan, WLANin tai Ethernet -yhteyden avulla. Sisältö DNA Netti - Testaa
DNA Netti DNA Netti on Mokkuloiden yhteysohjelma. Ohjelman avulla voit hallita Mokkulan asetuksia sekä luoda yhteyden internetiin Mokkulan, WLANin tai Ethernet -yhteyden avulla. Sisältö DNA Netti - Testaa
1. Sisällysluettelo 2
 1. Sisällysluettelo 2 1. Sisällysluettelo 2 2. Asennus, käyttöönotto, liittäminen 3 3. Painikkeet 4 4. Näyttö 4 5. Tehdasasetukset 5 6. Perustoiminnot 6 7. Viikonpäivien yhdisteleminen ohjelmoinnissa 7
1. Sisällysluettelo 2 1. Sisällysluettelo 2 2. Asennus, käyttöönotto, liittäminen 3 3. Painikkeet 4 4. Näyttö 4 5. Tehdasasetukset 5 6. Perustoiminnot 6 7. Viikonpäivien yhdisteleminen ohjelmoinnissa 7
+ 3 2 5 } {{ } + 2 2 2 5 2. 2 kertaa jotain
 Jaollisuustestejä (matematiikan mestariluokka, 7.11.2009, ohjattujen harjoitusten lopputuloslappu) Huom! Nämä eivät tietenkään ole ainoita jaollisuussääntöjä; ovatpahan vain hyödyllisiä ja ainakin osittain
Jaollisuustestejä (matematiikan mestariluokka, 7.11.2009, ohjattujen harjoitusten lopputuloslappu) Huom! Nämä eivät tietenkään ole ainoita jaollisuussääntöjä; ovatpahan vain hyödyllisiä ja ainakin osittain
Ohjelmoinnin peruskurssi Y1
 Ohjelmoinnin peruskurssi Y1 CSE-A1111 30.9.2015 CSE-A1111 Ohjelmoinnin peruskurssi Y1 30.9.2015 1 / 27 Mahdollisuus antaa luentopalautetta Goblinissa vasemmassa reunassa olevassa valikossa on valinta Luentopalaute.
Ohjelmoinnin peruskurssi Y1 CSE-A1111 30.9.2015 CSE-A1111 Ohjelmoinnin peruskurssi Y1 30.9.2015 1 / 27 Mahdollisuus antaa luentopalautetta Goblinissa vasemmassa reunassa olevassa valikossa on valinta Luentopalaute.
SALAKIRJOITUKSEN VAIKUTUS SUORITUSKYKYYN UBUNTU 11.10 käyttöjärjestelmässä -projekti
 Järjestelmäprojekti 1 projektisuunnitelma ICT4TN007-2 SALAKIRJOITUKSEN VAIKUTUS SUORITUSKYKYYN UBUNTU 11.10 käyttöjärjestelmässä -projekti Versio 0.1 Tekijät Keijo Nykänen Tarkastanut Hyväksynyt HAAGA-HELIA
Järjestelmäprojekti 1 projektisuunnitelma ICT4TN007-2 SALAKIRJOITUKSEN VAIKUTUS SUORITUSKYKYYN UBUNTU 11.10 käyttöjärjestelmässä -projekti Versio 0.1 Tekijät Keijo Nykänen Tarkastanut Hyväksynyt HAAGA-HELIA
TIEP114 Tietokoneen rakenne ja arkkitehtuuri, 3 op. FT Ari Viinikainen
 TIEP114 Tietokoneen rakenne ja arkkitehtuuri, 3 op FT Ari Viinikainen Tietokoneen rakenne Keskusyksikkö, CPU Keskusmuisti Aritmeettislooginen yksikkö I/O-laitteet Kontrolliyksikkö Tyypillinen Von Neumann
TIEP114 Tietokoneen rakenne ja arkkitehtuuri, 3 op FT Ari Viinikainen Tietokoneen rakenne Keskusyksikkö, CPU Keskusmuisti Aritmeettislooginen yksikkö I/O-laitteet Kontrolliyksikkö Tyypillinen Von Neumann
S14 09 Sisäpeltorobotti AS Automaatio ja systeemitekniikan projektityöt. Antti Kulpakko, Mikko Ikonen
 S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
HOITOALUE JA HOITOALUEELLA OLEVAT LAITTEET
 HOITOALUE JA HOITOALUEELLA OLEVAT LAITTEET SGS Fimko Oy Ilpo Pöyhönen Ilpo.Poyhonen@sgs.com Hermiankatu 12 B 33720 Tampere, Finland Puh. 043 8251326 MISTÄ PUHUTAAN Hoitoalue ja hoitoalueella olevat laitteet
HOITOALUE JA HOITOALUEELLA OLEVAT LAITTEET SGS Fimko Oy Ilpo Pöyhönen Ilpo.Poyhonen@sgs.com Hermiankatu 12 B 33720 Tampere, Finland Puh. 043 8251326 MISTÄ PUHUTAAN Hoitoalue ja hoitoalueella olevat laitteet
Sami Hirvonen. Ulkoasut Media Works sivustolle
 Metropolia ammattikorkeakoulu Mediatekniikan koulutusohjelma VBP07S Sami Hirvonen Ulkoasut Media Works sivustolle Loppuraportti 14.10.2010 Visuaalinen suunnittelu 2 Sisällys 1 Johdanto 3 2 Oppimisteknologiat
Metropolia ammattikorkeakoulu Mediatekniikan koulutusohjelma VBP07S Sami Hirvonen Ulkoasut Media Works sivustolle Loppuraportti 14.10.2010 Visuaalinen suunnittelu 2 Sisällys 1 Johdanto 3 2 Oppimisteknologiat
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-17 Ikäihmisten kotona asumista tukevien järjestelmien kehittäminen AikatauluValpas Salla Ojala Paula Laitio 1. Projektin tavoite 1.1 Alkuperäiset
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-17 Ikäihmisten kotona asumista tukevien järjestelmien kehittäminen AikatauluValpas Salla Ojala Paula Laitio 1. Projektin tavoite 1.1 Alkuperäiset
oppilaan kiusaamista kotitehtävillä vai oppimisen työkalu?
 Oppimispäiväkirjablogi Hannu Hämäläinen oppilaan kiusaamista kotitehtävillä vai oppimisen työkalu? Parhaimmillaan oppimispäiväkirja toimii oppilaan oppimisen arvioinnin työkaluna. Pahimmillaan se tekee
Oppimispäiväkirjablogi Hannu Hämäläinen oppilaan kiusaamista kotitehtävillä vai oppimisen työkalu? Parhaimmillaan oppimispäiväkirja toimii oppilaan oppimisen arvioinnin työkaluna. Pahimmillaan se tekee
Elektroniikkalajin semifinaalitehtävien kuvaukset
 Elektroniikkalajin semifinaalitehtävien kuvaukset Kilpailija rakentaa ja testaa mikrokontrollerilla ohjattavaa jännitereferenssiä hyödyntävän sovelluksen. Toteutus koostuu useasta elektroniikkamoduulista.
Elektroniikkalajin semifinaalitehtävien kuvaukset Kilpailija rakentaa ja testaa mikrokontrollerilla ohjattavaa jännitereferenssiä hyödyntävän sovelluksen. Toteutus koostuu useasta elektroniikkamoduulista.
KÄYTTÖOHJE ELTRIP-R6. puh. 08-6121 651 fax 08-6130 874 www.trippi.fi seppo.rasanen@trippi.fi. PL 163 87101 Kajaani
 KÄYTTÖOHJE ELTRIP-R6 PL 163 87101 Kajaani puh. 08-6121 651 fax 08-6130 874 www.trippi.fi seppo.rasanen@trippi.fi SISÄLLYSLUETTELO 1. TEKNISIÄ TIETOJA 2. ELTRIP-R6:n ASENNUS 2.1. Mittarin asennus 2.2. Anturi-
KÄYTTÖOHJE ELTRIP-R6 PL 163 87101 Kajaani puh. 08-6121 651 fax 08-6130 874 www.trippi.fi seppo.rasanen@trippi.fi SISÄLLYSLUETTELO 1. TEKNISIÄ TIETOJA 2. ELTRIP-R6:n ASENNUS 2.1. Mittarin asennus 2.2. Anturi-
Ohjelmiston kuvakkeiden kuvaus
 Ohjelmiston kuvakkeiden kuvaus Aliro-ohjelmiston kuvakkeiden esittely kattaa kaikki ohjelmistossa käytettävät kuvakkeet. Esittelyn avulla tunnistat helposti kuvakkeet ja niiden kautta käytettävät toiminnot.
Ohjelmiston kuvakkeiden kuvaus Aliro-ohjelmiston kuvakkeiden esittely kattaa kaikki ohjelmistossa käytettävät kuvakkeet. Esittelyn avulla tunnistat helposti kuvakkeet ja niiden kautta käytettävät toiminnot.
CAROUSEL PYÖRÖPORTTI Käyttäjän ohjekirja pyöröportille Ver 5 Rakenne, toiminta, perustus, logiikka ja kytkentäkuvat PUR-AIT
 www.purait.fi CAROUSEL PYÖRÖPORTTI Köyttäjän ohjekirja Ver 5 1 jps-mainos.fi PUR-AIT AIDAT - PORTIT - AUTOMATIIKKA CAROUSEL PYÖRÖPORTTI Käyttäjän ohjekirja pyöröportille Ver 5 Rakenne, toiminta, perustus,
www.purait.fi CAROUSEL PYÖRÖPORTTI Köyttäjän ohjekirja Ver 5 1 jps-mainos.fi PUR-AIT AIDAT - PORTIT - AUTOMATIIKKA CAROUSEL PYÖRÖPORTTI Käyttäjän ohjekirja pyöröportille Ver 5 Rakenne, toiminta, perustus,
- Kuvan osoittamalla tavalla klikkaa kohtaa Tallenna Tiedosto. - Esimerkissämme Firefox selaimessa latauspalkki näyttää tältä
 1 KODU OHJEET OSA 2 KODUN ASENNUS - Aloitamme asennuksen menemällä osoitteeseen www.google.fi ja sinne kirjoitamme kuvan osoittamalla tavalla kodu ja kun kuvan tapainen linkki listalta löytyy, niin siitä
1 KODU OHJEET OSA 2 KODUN ASENNUS - Aloitamme asennuksen menemällä osoitteeseen www.google.fi ja sinne kirjoitamme kuvan osoittamalla tavalla kodu ja kun kuvan tapainen linkki listalta löytyy, niin siitä
HISSIN JA TURVAKOMPONENTIN OLENNAISET TERVEYS- JA TURVALLISUUSVAATIMUKSET
 1796 Liite I HISSIN JA TURVAKOMPONENTIN OLENNAISET TERVEYS- JA TURVALLISUUSVAATIMUKSET Johdanto 1. Olennaisia terveys- ja turvallisuusvaatimuksia sovelletaan silloin, kun hissiä tai turvakomponenttia käytetään
1796 Liite I HISSIN JA TURVAKOMPONENTIN OLENNAISET TERVEYS- JA TURVALLISUUSVAATIMUKSET Johdanto 1. Olennaisia terveys- ja turvallisuusvaatimuksia sovelletaan silloin, kun hissiä tai turvakomponenttia käytetään