Miten saamme tehot irti roboteista?
|
|
|
- Sanna-Kaisa Härkönen
- 7 vuotta sitten
- Katselukertoja:
Transkriptio
1 Miten saamme tehot irti roboteista? Modernin robottitekniikan mahdollisuudet tuotannossa työpaja Seinäjoki, Frami, SMACC, SeAMK ja IntoSeinäjoki Timo Salmi, VTT
2 2 Kokonaisvaltainen lähestymistapa kokonaisuus ratkaisee tuote prosessi laitteisto heikoin lenkki määrittelee kapasiteetin ja joustavuuden joustavuustarve syytä määritellä tarkemmin joustavuutta saatavissa älykkyydellä


3 3 Mistä tuotantojärjestelmä koostuu robotti käsittelee kappaleita - kappaleenkäsittelyrobotti tekee prosessivaiheita - prosessirobotiikka prosessi työkalut erillinen työstökone robotin kourassa oleva työkalu robotin kourassa oleva kappale materiaalinkäsittely järjestelmään kuljetus ja kuljetus pois puskurointi järjestelmään syöttö siirto pois prosessoinnista kiinnitys prosessoinnin ajan kuljettimet makasiinit kiinnittimet tarraimet ohjausjärjestelmät robotin ohjaus anturit antureiden ohjausjärjestelmä järjestelmäohjaus ohjelmointijärjestelmä liityntä tehdasjärjestelmiin materiaalivirran ohjaus

4 4 Sarjakoko Tuotteen elinaikana tehtävien kappaleiden määrä. Sarjakoko ohjaa tuotekohtaisia investointeja. Kapasiteettitarve Minkälaisella volyymillä tuotetta pystytään tuottamaan. Käytettävissä oleva työaika johtaa tarvittavaan tahtiaikaan. Työmäärä/tuote johtaa tarvittavien työasemien määrään: robotteja, manuaalisia työpisteitä, työstökoneita jne. Määrää myös järjestelmän rakenteen, esim. solu linja. Tahtiaika ohjaa toiminnan painopistettä akselilla prosessi materiaalinkäsittely. Eräkoko Robottijärjestelmään liittyviä vaatimuksia ja parametreja Ohjaa materiaalinkäsittelyn ratkaisuja. Tahtiajan kanssa määrittelee, kuinka joustavaa eränvaihdon on oltava. Ratkaisut asetuksien helpottamiseksi: asetusten eliminointi, automatisointi, asetusten nopeuttaminen.


5 5 Robottijärjestelmään liittyviä vaatimuksia ja parametrejä Kappaleiden geometriset ominaisuudet yksittäinen tuote ja sen geometriset ominaisuudet tuotevariaatiot tuoteperhe tuotteisto, tuotemix liityntä Kappaleiden valmistustekniset ominaisuudet valmistusmenetelmät ja niihin liittyvät ominaisuudet ja parametrit samankaltaisuus / erilaisuus kappaleiden käsiteltävyyteen liittyvät ominaisuudet
6 6 Robottijärjestelmään liittyviä vaatimuksia ja parametreja Investoinnin tulee olla kannattava Järjestelmän elinaikanaan tuoma rationalisointihyöty tulee ylittää investointikulut rahoituskuluineen. Työvoiman säästö, mahdollinen laadun tuoton paraneminen. Käyttökulut, energia huolto yms. Manuaalisen työn osuus, ml. asetukset, häiriöiden selvittäminen. Monesti tavoitellaan suhteellisen lyhyttä takaisinmaksuaikaa Ei ilmennä investoinnin kannattavuutta optimaalisesti enemmänkin rahoitusvaikutusta. Ohjaa investointeja. Tuotekohtaiset investoinnit järjestelmäkohtaiset investoinnit. Osa investoinneista kohdistuu tietyn tuotteen valmistamiseen. Tuotekohtaiset kiinnittimet, tarraimet, työkalut, ohjelmat. Tulee kattaa tuotteen elinaikana. Liittyy tuotteen volyymiin liittyvä riski. Osa investoinneista on tuotteesta riippumattomia.

7 7 Piensarjavalmistuksen haaste Tuotteiden sarjakoot ovat pieniä Tuotteista on paljon erilaisia variaatioita Tuotteista tulee jatkuvasti uusia variaatioita Tuotteiden volyymien ennustettavuus on heikkoa yksittäinen tuote tai tuoteperhekään ei riitä investoinnin pohjaksi lähtökohdat automaatiolle hankalat kuitenkin odotetaan hyvää kilpailukykyä tuotantolaitteiden tuoteriippuva osuus on oltava mahdollisimman pieni investoitava joustavaan tekniikkaan joustavuus on investointi analysoitava joustavuustarpeet tuotantoinvestointi lähtee liikkeelle strategioista tuotantostrategia tuotestrategia henkilöstöstrategia
8 8 Erilaisia joustavuuden aspekteja tuotannolliselta kannalta Joustavuus lyhyen aikavälin kuormitusvaihteluihin Joustavuus kapasiteetin suhteen Kyky saada uusia erilaisia tuotteita tuotantoon Kyky tuottaa uusia asiakasvariaatioita tuotteista Kyky tuottaa erilaisia tuotteita samalla järjestelmällä Kyky tuottaa pieniä eriä Tekniset ratkaisut näihin joustavuuksiin ovat erilaisia.


9 9 Mitä erilaiset joustavuudet merkitsevät Kyvykkyys laajaan tuotevalikoimaan tuotantovolyymi koostuu useista erilaisista tuotteista, mahdollisesti useista tuoteperheistä joko samaan aikaan tai elinkaaren aikana tuotteesta riippuva osuus oltava mahdollisimman pieni kappaleenkäsittelyyn joustavuutta (tuotteesta riippumattomuutta): kiinnittimet tarraimet syöttö, makasinointi adaptiivisuuden ja anturitekniikan hyödyntäminen Uusien tuotteiden tuotantoon ottaminen on helppoa joustavaa kappaleenkäsittelyä edistykselliset ohjelmointimenetelmät

10 10 Mitä erilaiset joustavuudet merkitsevät Erän vaihto on helppoa materiaalinkäsittelyjärjestelmät tukevat pieniä eriä asetusten teon helpottaminen asetusten eliminointi joustava mekaniikka, tuoteriippumattomuus - fiksu tuotesuunnittelu asetusten teon automatisointi Mukautuminen tuotteissa oleviin muutoksiin robotin adaptoituminen tuotteiden mittavirheisiin prosessin adaptoituminen prosessissa oleviin vaihteluihin Mukautuminen ympäristössä oleviin muutoksiin esim. paikoitukset Järjestelmän muutosten toteuttaminen helppoa modulaarinen rakenne muunneltavuutta tukeva ohjausarkkitehtuuri
11 11 Mitä vaaditaan piensarjatuotannon robotiikalta Ehdotettu lähestymistapa järjestelmän suunnitteluun Määritellyn toimintaikkunan sisällä: siirryttäessä tuotteesta toiseen ei tarvita asetuksia ollenkaan, ne ovat hyvin helppoja tai automaattisia uusien tuotteiden vaatimat investoinnit ovat olemattomat ohjelmointi täysin tai lähes automaattista Hyvät valmiudet toimintaikkunan laajennukseen helposti muuteltava rakenne rekonfigurointia tukeva suunnittelujärjestelmä suunnittelu/simulointijärjestelmää hyödynnetään järjestelmän suunnittelussa ja toimintaikkunan laajentamisessa
12 12 Kokonaisvaltainen lähestymistapa kokonaisuus ratkaisee tuote prosessi laitteisto heikoin lenkki määrittelee joustavuuden joustavuustarve syytä määritellä tarkemmin joustavuutta saatavissa älykkyydellä
13 13 Älykkyyden lisääminen havainnointi + tiedonkäsittely => ohjaus sopeutuminen ympäristön vaihteluihin kappaleiden paikat kappaleiden mitat prosessin muutokset uusien tuotteiden opettaminen mekaniikan korvaaminen elektroniikalla ja ohjelmistoilla joustavuutta ja ketteryyttä älykkyyden avulla (flexibility & agility)



14 14 konenäkö Älykkyyden lisääminen - tekniikat monenlaista tekniikkaa: 2D, 3D, stereonäkö yms. paikoitukset, poiminta joustava syöttö ns. binpicking laadunvalvonta esimerkki: kappaleen mittaaminen anturitiedon käsittely - hiontaohjelmien luominen

15 15 Älykkyyden lisääminen - tekniikat voimaohjaus rata + vakiovoima vakiorata + muuttuva nopeus hionta ja koneistus erinäisiä muita töitä FC Pressure Constant speed Controlled force FC SpeedChange Variable speed Constant force Force control Force in the sensor controlled direction and speed along the surface is constant. Path is adapted to curvature of the surface. Controlled material removal rate. Force control Force in path direction is constant. The speed is variable. Path is constant. Controlled material removal rate. Kuva ABB Kuvassa VTT:n kehittämä voimaohjaukseen pohjautuva kahva, jolla voidaan ohjata robottia nostoapuvälineenä.
16 16 Älykkyyden lisääminen - tekniikat tietomallien hyödyntäminen ohjelmien generointi tietomalleista kappeleiden kalibrointi oppivat järjestelmät tiedon kerääminen -> ohjelmien kehittyminen laadunvalvonta - luokittelijat rekonfiguroituvuus muunneltavuus itserekonfiguroituvat järjestelmät automaattinen ohjelmien generointi tuote- ja prosessimalleista järjestelmät rakentuvat älykkäistä moduuleista toiminta pohjautuu ontologioihin; moduulien kuvaukset ns. plug n play-arkkitehtuuri

17 Anturitekniikka mahdollistaa adaptiivisuuden. Materiaalinkäsittelyn laitteet ei-kappalekohtaisia anturitekniikkaa hyödyntäviä kiinnittimet tarraimet materiaalinkäsittely työkalut Automaatiosaarekkeet konsepti, kooste piensarjatuotannon robotiikan elementeistä Robotti peruslaite prosessilaite materiaalinkäsittely 17 Ohjausohjelmistot yhteydet tietojärjestelmiin työjonojen hallinta adaptiivisuus, anturitiedon käsittely asetusten hallinta Ohjaus-hardware ja kommunikointi Ohjelmointi lähes automaattista off-line CAD-pohjalta ohjelmamoduulien pohjalta anturitietojen pohjalta online



18 18 Ihmisen ja robotin turvallinen yhteistyö Kuva ABB
19 19 Ihmisen ja robotin yhteistyö Yhteistyön tilanteita ohjelmointi häiriöiden selvitys materiaalinkäsittely varsinainen ihminen-robotti-yhteistyö prosessin yhteydessä jatkuva tai yksittäiseen prosessin vaiheeseen liittyen Tärkeimmät vaarat liikkuvan robotin törmäys ihmiseen puristumisvaara lentävät esineet, kipinät yms. tarraimesta putoava kappale Vaaran aiheuttajina robotti robotin työkalut (esim. hionta, koneistus, plasmaleikkaus, laser, tarraimet) oheislaitteet (esim. kuljettimet, kääntöpöydät, kiinnittimet) solun muut laitteet (esim. palveltava työstökone ja sen oheislaitteet)
20 20 Ihmisen ja robotin yhteistyö Perinteinen lähtökohta ihmisen ja robotin eristäminen. Uudet koneturvallisuusstandardit ja uusi turvatekniikka ovat tuoneet uudenlaisia mahdollisuuksia ihmisen robotin yhteistyöhön. Teollisuusrobotit ovat väsymättömiä, ne pystyvät toistamaan samoja liikkeitä tarkasti suurillakin kuormilla. Ihminen on robottiin verrattuna älykäs, luova ja erittäin joustava. Useissa tehtävissä parhaaseen tulokseen päästään, jos robotin ja ihmisen parhaimmat puolet saadaan yhdistettyä, tällöin robotin ja ihmisen on voitava työskennellä läheisessä yhteistyössä. Osa tehtävistä on voi olla hyvin vaikeita automatisoida, jolloin yksinkertaisempi ratkaisu on ihminen-robottiyhteistyö. Keskeinen vuorovaikutteisen robotiikan yleistymisen este on ollut yhteistyön turvallisuus. Robotin ja ihmisen työskentely yhteistyökumppaneina on ollut turvallisuuden näkökulmasta vain harvoin mahdollista.
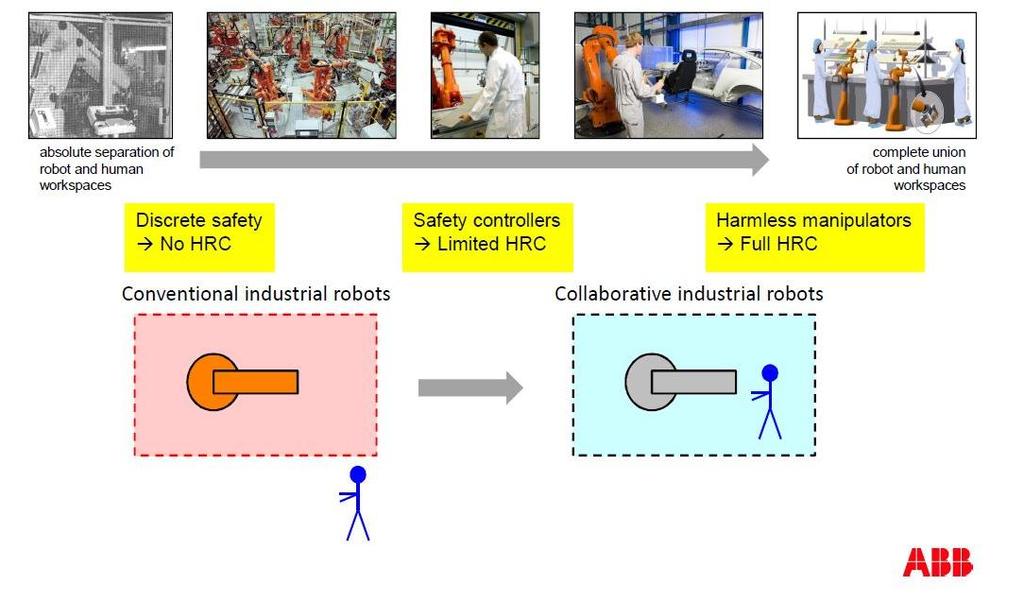
21 21 Ihminen-robottikonseptien kehityskulku
22 22 JATKUVAN SIGNAALIN KATKEAMINEN SIGNAALI SAADAAN HAVAITTAESSA KOHDE TUNTOMATTO PERINTEISIÄ TURVALAITTEITA TUNTOREUNA VALOKENNO VALOVERHO KONENÄKÖ - KAMERA LASERSKANNERI OPTINEN LÄHESTYMIS- KYTKIN MIKROAALTO- ANTURI ULTRAÄÄNI- ANTURI PASSIIVINEN INFRAPUNAILMAISIN Turvalaitteissa vikaantuminen ei aiheuta vaaratilannetta, vikaantuminen tapahtuu turvalliseen suuntaan. Vaihtoehtoisesti turvallisuus taataan kahdennetulla järjestelmällä. 22







23 23 UUTTA TURVATEKNIIKKAA Turvaohjaimet softapohjaiset ohjaimeen integroidut turvajärjestelmät alueiden rajaus, nopeuden rajaus Uusia turvalaitteita kameraan perustuvat turvajärjestelmät laserpohjaiset Luontaisesti turvalliset robottijärjestelmät kevyet robotit, hidastaminen voima-anturoidut robotit pehmustus, törmäystunnistus DLR JUSTIN DLR LWR III Pilz, Safety Eye KUKA, KR 3 SI Laser Scanner, Schmersal 23 Neuronics Katana
 infrapunalasersäteellä ja mittaa säteisiin osuneiden")


24 24 Uusia turvalaitteita - turvalaserskanneri Turvalaserskanneri on optinen anturi, joka pyyhkii ympäristöään viuhkamaisesti (kaksiulotteisesti) infrapunalasersäteellä ja mittaa säteisiin osuneiden kohteiden etäisyydet ja paikan. Turvalaserskannerin pyyhkimä alue on jopa yli 270 astetta ja mittausetäisyys on useita metrejä (esim. 4 7 m). Vaaka-asennossa on huomioitava lisäksi käden ulottuvuus. Turvaetäisyyksissä huomioitava ihmisen kulkema matka ennenkuin robotti pysähtyy: anturin reagointiaika robotin reagointiaika robotin pysähtymisaika lisäksi mahdollisesti robotin pysähtymismatka turvaetäisyydet merkittäviä kuva, häkki vs. optinen


25 25 SafetyEye - konenäköpohjainen turvajärjestelmä (Pilz) SafetyEye järjestelmässä määritellään kolmiulotteiset alueet pysäytykselle varoitukselle ja mahdollisille muille alueille. Kamera asetetaan 1,5 7,5 m korkeudelle ja se havaitsee kuvassa ihmisen kehon ja periaatteessa raajatkin. Järjestelmä sisältää kolme kameraa, kaksi tietokonetta ja turvalogiikan. Vasteaika on 300 ms ja se täyttää luokan 3 ohjausjärjestelmän vaatimukset (EN 954-1). Järjestelmä herkkä kaikenlaisille ympäristön muutoksille. 25
.")
 ohjelmallisesti rajoitetut nopeudet pysähtymisen valvonta => ohjelmallinen")
26 26 Turvaohjain -robottien alueiden pienentäminen Robotin alueen pienentäminen mekaanisilla rajoilla (hard stop). Turvaohjain ohjelmallisesti rajoitetut robotin alueet (estää rajan ylittämisen / reagoi ylittämiseen) ohjelmallisesti rajoitetut nopeudet pysähtymisen valvonta => ohjelmallinen turvallinen pysäytys mahdollista määritellä useita rajoitettuja 3D-alueita Source ABB


27 27 Esimerkkejä yhteistyöstä Vanerin laatuluokittelu Pinojen nouto trukilla, noudon kuittauspainikkeet Tarkastetut ja laatuluokitellut pinot Valvotut portit Prismapeilikennot valvovat robotin tarttujan kahta asemapaikkaa Tarkastusasema Laadunkuittauspainikkeet Ihminen tarkastaa vanerin laadun, luokittelee vanerin ja tekee tarvittavat paikkaukset. Robotti nostaa esim.120 kg painavan vanerilevyä ja asettaa sen sopivaan asentoon ihmisen tarkastusta varten. Robotti siirtää levyn laatuluokkaa vastaavaan pinoon. [Visuvesi Oy] Valokennolinjat rajaavat alueet takana, robotin ja tarkastusaseman välissä sekä kuittauspainikkeiden edustalla 27

28 28 Esimerkkejä yhteistyöstä 6D-hiirellä ohjattava robotti Työntekijä voi ohjata robottia tarttumalla tarttujaan asennettuun 6D-hiireen. 6D-hiiri soveltuu esimerkiksi robotin ohjelmointiin, opettamalla robotille kädestä pitäen reitit ja pisteet. Laitteella onnistuu myös robotin käyttö keventimenä tai nostimena, kiinnittämällä nostettava tai liikuteltava kuorma robotin tarttujaan, ja ohjaamalla sitä 6D-hiiren avulla. [Fraunhofer IPA / Reis Robotics] Vastaava ratkaisu tehtävissä voimaohjatulla robotilla, jonka tarraimessa on vapaustuskytkimet.


29 29 Liikuteltavan robotin liikuteltava turvajärjestelmä VTT:n kehittämä liikuteltava robottijärjestelmä, joka voidaan paikoittaa useisiin vaihtoehtoisiin paikkoihin. Turvajärjestelmä integroitu liikutusalustaan laserskannerit integroitu liikutusalustaan robotin turvaohjain, robotin alue rajoitettu, erilaisia nopeusvyöhykkeitä. mielekkäät turva-alueet reuna-alueiden nopeuksia rajoittamalla
30 30 Esimerkkejä mahdollisesta yhteistyöstä Robotti avustaa työntekijää, erilaisia ratkaisuja Solu, jossa robotti toimii älykkäänä jiginä kääntelee kappaletta ja ihminen tekee siihen operaatioita. (hitsaus, maalaus tai kokoonpanojigi). Kokoonpanosolu, jossa robotti tuo kokoonpantavan kappaleen ihmisen ulottuville tiettyjä robotille hankalia tai räätälöintioperaatioita varten. Kokoonpanosolu, jossa robotti ojentelee osia. Tehtävä kokoonpanotyö on niin haasteellinen ja vaatii monimutkaisia liikkeitä, joihin vain ihminen kykenee. Robotti asentaa tarkkuutta vaativan osan, työntekijän pitäessä kokoonpanoa jigiä vasten. (apuna esim. voimaohjaus, momenttirajoitus konenäkö).
31 31 Edistyksellinen ratkaisu dynaaminen turvajärjestelmä Eräs VTT:n demoama ratkaisu ihmisen ja robotin yhteistyöhön isoilla roboteilla. Lähtökohtana on robotin työaluetta lähestyvän ihmisen liikkeiden seuraaminen. Kun ihminen lähestyy robottia, sen nopeutta ja turva-aluetta pienennetään jopa robotin liikkeen pysäyttämiseen asti. Ihmisen etääntyessä turva-alueelta robotin nopeus palautuu asteittain automaattisesti. Seuranta-anturin ei tarvitse olla turvalaite, joten se vaatii rinnalle varsinaisen turvajärjestelmän, joka perustuu joustavaan turvalaitteeseen, esim. turvalaserskanneriin tai 3D-turvaskanneriin.



32 32 Robotti-ihminen yhteistyödemo VTT Kuvat vasemmalla: seurantajärjestelmä tunnistaa ihmishahmon. Kuva oikealla ylhäällä: Konenäköpohjainen turvajärjestelmä.

 Turvalaserskanneri, turva-alue (punainen) 3.")


33 33 Dynaamisen turvajärjestelmän toiminta: työntekijän seuranta ja robotin dynaaminen turva-alue 1. Työntekijä lähestyy valvontakenttää, robotti toimii täydellä nopeudella ja turva-alueella. Valvontakenttä (keltainen) Turvalaserskanneri, turva-alue (punainen) 3. Työntekijä lähestyy edelleen robottia. Robotti pienentää nopeutta ja turva-aluetta. Robotti lähtee viemään työkappaletta ihmisen ulottuville. 2. Työntekijä on valvontakentällä ja lähestyy robottia. Robotti hidastaa nopeutta ja pienentää turva-aluetta 4. Työntekijä lähestyy edelleen. Robotti vie työkappaleen ihmisen ulottuville ja pysähtyy. Turvaohjain monitoroi, että robotti on pysähtyneenä ja poistaa turva-alueen käytöstä, koska robotti on pysähtynyt.
34 34 Luontaisesti turvallisten ns. yhteistyörobottien käyttö kevyt rakenne, pehmustukset törmäysten tunnistus voima-anturointi voimien ja nopeuksien rajoittaminen vakio/erilaiset asetukset standardissa erilaiset voimat kehon eri osille turvallinen robotti ei riitä, tarvitaan turvallinen kokonaisuus käytännöt osittain vakiintumattomia

35 35 Lähde ISO/TS15066



36 36 KUKA LWR iiwa uudelleenrakennettu ja kaupallistettu DLR LWR 7-akselinen robotti, kevytrakenteinen 7 ja 14 kg kuorman versiot voima-anturointia hyödynnetään sekä turvallisuudessa että toiminnallisuudessa opettaminen johdattamalla monipuolisia turvatoimintoja alueittain määriteltävissä turvamoodi: nopea ja tarkka tai turvallinen ja hitaampi tietyn suuntainen tönäisy robottiin voi olla osa käyttöliityntää


37 37 tullee markkinoille 2015 ABB YuMi kaksikätinen robotti, 7-akselinen robotti teollisuuden kokoonpanoon soveltuva robotti, joka voi toimia yhdessä ihmisten kanssa ihmistä mukailevat käsivarret ja runko, johon on integroitu IRC5 ohjain pehmustetut kaksi käsivartta kevyt rakenne, pieni kuorma, pieni inertia, hitaat liikkeet, kaksi käsivartta älykkäät liikkeet taustalla useita tutkimuslaitoksia ja projekteja, aiemmin tunnettiin nimellä FRIDA

 käyttöjännite 230 V (perinteiset vaativat voimavirtaa) hidas, TCP-nopeus vain 1 m/s, vastaava perinteinen robotti esim.")
38 38 Universal Robots Universal Robots UR5 ja UR10 6-akselinen, hyötykuorma 3, 5 tai 10 kg kevyt, käsin nostettavissa ulottuma mm, tarkkuus ± 0,1 mm Ominaisuudet perinteiseen robottiin verrattuna: taluttamalla opettaminen sisäänrakennettuna törmäystunnistin on erittäin herkkä, robotin voi asentaa ilman turvahäkkiä ihmisten sekaan ja se täyttää EU:n turvastandardit tässä on kuitenkin tullut vastaan erilaisia tulkintoja määräyksistä edullisempi kuin perinteinen robotti käyttöliittymä on pyritty rakentamaan helppokäyttöiseksi kaikki nivelet kääntyvät 360 astetta (perinteisissä yleensä ainakin osa nivelistä vähemmän) käyttöjännite 230 V (perinteiset vaativat voimavirtaa) hidas, TCP-nopeus vain 1 m/s, vastaava perinteinen robotti esim. 2,5 m/s tarkkuus ±0,1 mm on kohtuullinen, mutta perinteisillä pienillä teollisuusroboteilla ~±0,05 mm
39 39 Uusimman tekniikan tuomat käytännön mahdollisuudet ns. turvalliset robotit älykkäät turva-anturit turvaohjaimet dynaamiset turvajärjestelmät liikuteltavan robotin turvajärjestelmä robotin ohjaaminen 6D-ohjaimella - robotti kuorman keventäjänä innovatiivisuus Uudenlaisia ratkaisuja ihmisen ja robotin yhteistyöhön.

40 40 VTT luo teknologiasta liiketoimintaa
VUOROVAIKUTTEISEN ROBOTIIKAN TURVALLISUUS
 MASINA loppuseminaari 14.5.2008 Tampere talo Timo Malm VUOROVAIKUTTEISEN ROBOTIIKAN TURVALLISUUS PUOLIAUTOMAATIORATKAISUT IHMINEN KONE JÄRJESTELMISSÄ (PATRA) Kesto: 5/2006 12/2007 Resurssit: n. 39 htkk;
MASINA loppuseminaari 14.5.2008 Tampere talo Timo Malm VUOROVAIKUTTEISEN ROBOTIIKAN TURVALLISUUS PUOLIAUTOMAATIORATKAISUT IHMINEN KONE JÄRJESTELMISSÄ (PATRA) Kesto: 5/2006 12/2007 Resurssit: n. 39 htkk;
ROBOTTIJÄRJESTELMIEN UUDET TURVALLISUUSTEKNIIKAT
 Alihankinta 2008 17.9.2008 Suomen Robotiikkayhdistys Timo Malm ROBOTTIJÄRJESTELMIEN UUDET TURVALLISUUSTEKNIIKAT PUOLIAUTOMAATIORATKAISUT IHMINEN- KONE-JÄRJESTELMISSÄ (PATRA) Kesto: 5/2006-3/2008 Resurssit:
Alihankinta 2008 17.9.2008 Suomen Robotiikkayhdistys Timo Malm ROBOTTIJÄRJESTELMIEN UUDET TURVALLISUUSTEKNIIKAT PUOLIAUTOMAATIORATKAISUT IHMINEN- KONE-JÄRJESTELMISSÄ (PATRA) Kesto: 5/2006-3/2008 Resurssit:
Mitä ovat yhteistyörobotit. Yhteistyörobotit ovat uusia työkavereita, robotteja jotka on tehty työskentelemään yhdessä ihmisten kanssa.
 Yhteistyörobotiikka Mitä ovat yhteistyörobotit Yhteistyörobotit ovat uusia työkavereita, robotteja jotka on tehty työskentelemään yhdessä ihmisten kanssa. Yhteistyörobotit saapuvat juuri oikeaan aikaan
Yhteistyörobotiikka Mitä ovat yhteistyörobotit Yhteistyörobotit ovat uusia työkavereita, robotteja jotka on tehty työskentelemään yhdessä ihmisten kanssa. Yhteistyörobotit saapuvat juuri oikeaan aikaan
Miten piensarjatuotantoon saadaan joustavuutta?
 Miten piensarjatuotantoon saadaan joustavuutta? Jyrki Latokartano, Tampereen teknillinen yliopisto Modernin robottitekniikan mahdollisuudet tuotannossa SeAMK 4.4.2017 kello 12.30-16.00 Miten piensarjatuotantoon
Miten piensarjatuotantoon saadaan joustavuutta? Jyrki Latokartano, Tampereen teknillinen yliopisto Modernin robottitekniikan mahdollisuudet tuotannossa SeAMK 4.4.2017 kello 12.30-16.00 Miten piensarjatuotantoon
Robotiikan tulevaisuus ja turvallisuus
 Robotiikan tulevaisuus ja turvallisuus NWE 2014 Satelliittiseminaari 4.11.2014 Jyrki Latokartano TTY Kone- ja Tuotantotekniikan laitos Suomen Robotiikkayhdistys ry Robottiturvallisuus? Kohti ihmisen ja
Robotiikan tulevaisuus ja turvallisuus NWE 2014 Satelliittiseminaari 4.11.2014 Jyrki Latokartano TTY Kone- ja Tuotantotekniikan laitos Suomen Robotiikkayhdistys ry Robottiturvallisuus? Kohti ihmisen ja
Yhteistyörobotiikan tutkimus MoRo-hankkeen aloitusseminaari Ilari Marstio
 TEKNOLOGIAN TUTKIMUSKESKUS VTT OY Yhteistyörobotiikan tutkimus MoRo-hankkeen aloitusseminaari 26.10.2016 Ilari Marstio Yhteistyörobotiikka Miksi nyt? Perinteinen automaatio ei vastaa nykytuotannon tarpeisiin
TEKNOLOGIAN TUTKIMUSKESKUS VTT OY Yhteistyörobotiikan tutkimus MoRo-hankkeen aloitusseminaari 26.10.2016 Ilari Marstio Yhteistyörobotiikka Miksi nyt? Perinteinen automaatio ei vastaa nykytuotannon tarpeisiin
Teemu Rantala, ABB Oy, Robotics YuMi - Robotti ja ihminen yhdessä
 Teemu Rantala, ABB Oy, Robotics YuMi - Robotti ja ihminen yhdessä 3.11.2016 YuMi - Robotti ja ihminen yhdessä Digitalisaatio ja robotiikka teollisuudessa ABB Oy, Robotics YuMi-yhteistyörobotti Sovelluskohteita
Teemu Rantala, ABB Oy, Robotics YuMi - Robotti ja ihminen yhdessä 3.11.2016 YuMi - Robotti ja ihminen yhdessä Digitalisaatio ja robotiikka teollisuudessa ABB Oy, Robotics YuMi-yhteistyörobotti Sovelluskohteita
Helppokäyttöistä ja joustavaa robotiikkaa
 Helppokäyttöistä ja joustavaa robotiikkaa Jyrki Latokartano TTY Kone- ja Tuotantotekniikan laitos Suomen Robotiikkayhdistys ry Takeoff! Seminaari, Savonia, Kuopio Jyrki Latokartano - Takeoff! Robottiautomaation
Helppokäyttöistä ja joustavaa robotiikkaa Jyrki Latokartano TTY Kone- ja Tuotantotekniikan laitos Suomen Robotiikkayhdistys ry Takeoff! Seminaari, Savonia, Kuopio Jyrki Latokartano - Takeoff! Robottiautomaation
Automaatioratkaisuja yli
 Automaatioratkaisuja yli 40 vuoden kokemuksella 1 Asiakaslähtöisiä tuotantoautomaation ratkaisuja yli 40 vuoden kokemuksella Vuonna 1976 perustettu Sermatech Group on n. 70 henkilöä työllistävä monipuolinen
Automaatioratkaisuja yli 40 vuoden kokemuksella 1 Asiakaslähtöisiä tuotantoautomaation ratkaisuja yli 40 vuoden kokemuksella Vuonna 1976 perustettu Sermatech Group on n. 70 henkilöä työllistävä monipuolinen
TigerStop Standard Digitaalinen Syöttölaite / Stoppari
 Perkkoonkatu 5 Puh. 010 420 72 72 www.keyway.fi 33850 Tampere Fax. 010 420 72 77 palvelu@keyway.fi TigerStop Standard Digitaalinen Syöttölaite / Stoppari Malli Työpituus Kokonaispituus Standardi mm mm
Perkkoonkatu 5 Puh. 010 420 72 72 www.keyway.fi 33850 Tampere Fax. 010 420 72 77 palvelu@keyway.fi TigerStop Standard Digitaalinen Syöttölaite / Stoppari Malli Työpituus Kokonaispituus Standardi mm mm
Millainen on menestyvä digitaalinen palvelu?
 Millainen on menestyvä digitaalinen palvelu? TOIMIVA ÄLYKÄS ILAHDUTTAVA Ohjelmistokehitys Testaus ja laadunvarmistus Ohjelmistorobotiikka Tekoäly Käyttöliittymäsuunnittelu Käyttäjäkokemussuunnittelu 1
Millainen on menestyvä digitaalinen palvelu? TOIMIVA ÄLYKÄS ILAHDUTTAVA Ohjelmistokehitys Testaus ja laadunvarmistus Ohjelmistorobotiikka Tekoäly Käyttöliittymäsuunnittelu Käyttäjäkokemussuunnittelu 1
ELEC-C1110 Automaatio- ja systeemitekniikan. Luento 11 Esimerkki automaation soveltamisesta
 ELEC-C1110 Automaatio- ja systeemitekniikan perusteet Luento 11 Esimerkki automaation soveltamisesta Tämän luennon aihe Esimerkki automaation soveltamisesta käytännössä: WorkPartner-palvelurobotti WorkPartner
ELEC-C1110 Automaatio- ja systeemitekniikan perusteet Luento 11 Esimerkki automaation soveltamisesta Tämän luennon aihe Esimerkki automaation soveltamisesta käytännössä: WorkPartner-palvelurobotti WorkPartner
TUNTOREUNAT. Kuvaus. Ominaisuudet ja edut
 TUNTOREUNAT Kuvaus Tapeswitch tuntoreunat on kosketukseen perustuvia turvaantureita jotka on suunniteltu suojaamaan henkilöitä ja laitteita erilaisissa ympäristöissä. Tapeswitch tuntoreunojen toiminta
TUNTOREUNAT Kuvaus Tapeswitch tuntoreunat on kosketukseen perustuvia turvaantureita jotka on suunniteltu suojaamaan henkilöitä ja laitteita erilaisissa ympäristöissä. Tapeswitch tuntoreunojen toiminta
Paloilmoitusjärjestelmän laajennusratkaisu - Sinteso Move
 www.siemens.fi/paloturvallisuus Paloilmoitusjärjestelmän laajennusratkaisu - Sinteso Move Yhdistä nykyinen paloilmoitusjärjestelmäsi Sintesoon. Se on palontorjunnan uusi ulottuvuus. Infrastructure & Cities
www.siemens.fi/paloturvallisuus Paloilmoitusjärjestelmän laajennusratkaisu - Sinteso Move Yhdistä nykyinen paloilmoitusjärjestelmäsi Sintesoon. Se on palontorjunnan uusi ulottuvuus. Infrastructure & Cities
TUOTE-ESITTELY
 TUOTE-ESITTELY 24.09.2018 KOKOONPANOKÄRRY IT-Line kokoonpanokärry suurten tuotteiden kokoonpanoon. Korkeussäädettävään kokoonpanokärryyn on vapaasti lisättävissä työtason kallistus- sekä pyöritysominaisuus,
TUOTE-ESITTELY 24.09.2018 KOKOONPANOKÄRRY IT-Line kokoonpanokärry suurten tuotteiden kokoonpanoon. Korkeussäädettävään kokoonpanokärryyn on vapaasti lisättävissä työtason kallistus- sekä pyöritysominaisuus,
 Työstäminen robotilla Zenex perustettu 1986 Erikoistunut teknisiin ohjelmistoihin Mastercam CAM-ohjelmisto Mathcad laskentaohjelmisto KeyCreator CAD (ent. CADKEY) Työstörataohjelmien hallinta, DNC etc.
Työstäminen robotilla Zenex perustettu 1986 Erikoistunut teknisiin ohjelmistoihin Mastercam CAM-ohjelmisto Mathcad laskentaohjelmisto KeyCreator CAD (ent. CADKEY) Työstörataohjelmien hallinta, DNC etc.
Ihmisen ja robotin yhteistyö haasteita ja mahdollisuuksia
 Ihmisen ja robotin yhteistyö haasteita ja mahdollisuuksia Konepajateollisuuden tulevaisuus ja tekniikat - seminaari, 30.9.2014 Timo Salmi, Otso Väätäinen, Timo Malm, Ilari Marstio, VTT Teollisuusrobotiikan
Ihmisen ja robotin yhteistyö haasteita ja mahdollisuuksia Konepajateollisuuden tulevaisuus ja tekniikat - seminaari, 30.9.2014 Timo Salmi, Otso Väätäinen, Timo Malm, Ilari Marstio, VTT Teollisuusrobotiikan
Vakautta koko työskentelyalueella
 Vakautta koko työskentelyalueella Luotettava kumppani EVS tarkkailee ajoneuvon vakautta aktiivisesti. Järjestelmä huomioi kaikki olosuhteet, ajoneuvon kuorman, nosturin kuorman sekä perän kallistuksen
Vakautta koko työskentelyalueella Luotettava kumppani EVS tarkkailee ajoneuvon vakautta aktiivisesti. Järjestelmä huomioi kaikki olosuhteet, ajoneuvon kuorman, nosturin kuorman sekä perän kallistuksen
Erikoistuminen ja automaatio teknologiateollisuudessa. Pemamek Oy Ltd Kimmo Ruottu. Sales Director, Scandinavia & Germany
 Erikoistuminen ja automaatio teknologiateollisuudessa Pemamek Oy Ltd Kimmo Ruottu Sales Director, Scandinavia & Germany kimmo.ruottu@pemamek.com www.pemamek.com 16.9.2014 Pemamek Oy Johtava yritys hitsausautomaatioratkaisuissa,
Erikoistuminen ja automaatio teknologiateollisuudessa Pemamek Oy Ltd Kimmo Ruottu Sales Director, Scandinavia & Germany kimmo.ruottu@pemamek.com www.pemamek.com 16.9.2014 Pemamek Oy Johtava yritys hitsausautomaatioratkaisuissa,
Todettu kokeissa FCC:n standardien mukaiseksi. Yhdysvalloissa saatu patentti 7 199 792.
 Todettu kokeissa FCC:n standardien mukaiseksi. Yhdysvalloissa saatu patentti 7 199 792. Onnea uuden hankinnan johdosta 2 3 Pakkauksen sisältö Perustoiminnot A. RollerMouse Free2 B. Integroitu rannetuki
Todettu kokeissa FCC:n standardien mukaiseksi. Yhdysvalloissa saatu patentti 7 199 792. Onnea uuden hankinnan johdosta 2 3 Pakkauksen sisältö Perustoiminnot A. RollerMouse Free2 B. Integroitu rannetuki
Sähkö lisää Hyvinvointia ja turvallisuutta. Sinikka Hieta-Wilkman
 Sähkö lisää Hyvinvointia ja turvallisuutta 2 Sähköistys ja langaton ohjaus leviävät uusiin asioihin ja esineisiin sekä lisäävät niiden ohjailtavuutta, tehokkuutta ja toimintoja. Esineiden internet ja paikannuksen
Sähkö lisää Hyvinvointia ja turvallisuutta 2 Sähköistys ja langaton ohjaus leviävät uusiin asioihin ja esineisiin sekä lisäävät niiden ohjailtavuutta, tehokkuutta ja toimintoja. Esineiden internet ja paikannuksen
Autonomisen liikkuvan koneen teknologiat. Hannu Mäkelä Navitec Systems Oy
 Autonomisen liikkuvan koneen teknologiat Hannu Mäkelä Navitec Systems Oy Autonomisuuden edellytykset itsenäinen toiminta ympäristön havainnointi ja mittaus liikkuminen ja paikannus toiminta mittausten
Autonomisen liikkuvan koneen teknologiat Hannu Mäkelä Navitec Systems Oy Autonomisuuden edellytykset itsenäinen toiminta ympäristön havainnointi ja mittaus liikkuminen ja paikannus toiminta mittausten
SPEED GRADER G2 Teknistä huippulaatua ja kestävyyttä
 & SPEED GRADER G2 Teknistä huippulaatua ja kestävyyttä www.pthproducts.com Tiehöylä omassa luokassaan Monikäyttöinen kiinnitysjärjestelmä Nopea asentaa Korkea laatu 2 Täydellisyyttä kahdessa eri kokoluokassa
& SPEED GRADER G2 Teknistä huippulaatua ja kestävyyttä www.pthproducts.com Tiehöylä omassa luokassaan Monikäyttöinen kiinnitysjärjestelmä Nopea asentaa Korkea laatu 2 Täydellisyyttä kahdessa eri kokoluokassa
Taitaja 2013, Mekatroniikka Turvalaitteet
 Taitaja 2013, Mekatroniikka Turvalaitteet Versio Tekijä Tarkastaja 1.0 PR 30.01.2013 1.1 AK 4.2.2013 1.2 PR 28.2.2013 1.3 AK 1.3.2013 Tulostettu: 2.5.2013 22:28 1(7) SÄLLYSLUETTELO 1. Perustiedot 3 1.1.
Taitaja 2013, Mekatroniikka Turvalaitteet Versio Tekijä Tarkastaja 1.0 PR 30.01.2013 1.1 AK 4.2.2013 1.2 PR 28.2.2013 1.3 AK 1.3.2013 Tulostettu: 2.5.2013 22:28 1(7) SÄLLYSLUETTELO 1. Perustiedot 3 1.1.
Tuotteen hitsattavuuden testaus robottisimulointiohjelmalla. Kari Solehmainen Savonia Ammattikorkeakoulu HitSavonia
 Tuotteen hitsattavuuden testaus robottisimulointiohjelmalla Kari Solehmainen Savonia Ammattikorkeakoulu HitSavonia Sisältö Yhtenäissuunnittelu (Concurrent engineering) Mallinnus ja simulointi Robottihitsauksen
Tuotteen hitsattavuuden testaus robottisimulointiohjelmalla Kari Solehmainen Savonia Ammattikorkeakoulu HitSavonia Sisältö Yhtenäissuunnittelu (Concurrent engineering) Mallinnus ja simulointi Robottihitsauksen
ERGOLATOR. Henkilökohtainen nostoapulaite. 15 200 kg. ERGOLATOR erilaisten rullien käsittelyyn
 Henkilökohtainen nostoapulaite 5 00 kg ERGOLATOR erilaisten rullien käsittelyyn Henkilökohtainen nostoapulaite Jokaiselle oikea työskentelykorkeus ei turhaa kumartelua tai kurottamista. Portaaton nostonopeus
Henkilökohtainen nostoapulaite 5 00 kg ERGOLATOR erilaisten rullien käsittelyyn Henkilökohtainen nostoapulaite Jokaiselle oikea työskentelykorkeus ei turhaa kumartelua tai kurottamista. Portaaton nostonopeus
Robottien etäohjelmointiprojektin toteutus
 Robottien etäohjelmointiprojektin toteutus Moduuli 4: Hitsausprosessit ja hitsausrobotin ohjelmointi Robottihitsauksen tuottavuus ja tehokas käyttö Heikki Aalto ja Ari Lylynoja Esitelmän sisältö Mikä on
Robottien etäohjelmointiprojektin toteutus Moduuli 4: Hitsausprosessit ja hitsausrobotin ohjelmointi Robottihitsauksen tuottavuus ja tehokas käyttö Heikki Aalto ja Ari Lylynoja Esitelmän sisältö Mikä on
Turva-automaation suunnittelu
 Tero Lehtimäki / 15.10.2006 1 (15) Tiivistelmä: Luennon tarkoituksena on käsitellä TLJ-järjestelmissä käytettävien turvaautomaatio ratkaisujen suunnittelussa huomioitavia asioita yleisellä tasolla siten,
Tero Lehtimäki / 15.10.2006 1 (15) Tiivistelmä: Luennon tarkoituksena on käsitellä TLJ-järjestelmissä käytettävien turvaautomaatio ratkaisujen suunnittelussa huomioitavia asioita yleisellä tasolla siten,
PALAX KLAPIKONEMALLISTO
 COMBI M II - 3 KS 35-6 POWER 70S - 10 POWER 100S - 14 PALAX KLAPIKONEMALLISTO Yhteiset ominaisuudet Poistokuljetin Yhteinen ominaisuus kaikille koneille on nyt uudistettu 4,3 m pitkä ja 0,2 m leveä taittuva
COMBI M II - 3 KS 35-6 POWER 70S - 10 POWER 100S - 14 PALAX KLAPIKONEMALLISTO Yhteiset ominaisuudet Poistokuljetin Yhteinen ominaisuus kaikille koneille on nyt uudistettu 4,3 m pitkä ja 0,2 m leveä taittuva
Intuitiivisen robotiikan ja mukautettavan modulaarisen pakkauslinjan tulevaisuus
 Intuitiivisen robotiikan ja mukautettavan modulaarisen pakkauslinjan tulevaisuus Samuli Bergström, Tuotemarkkinointipäällikkö Pingisrobottimme kykenee pitkäkestoisiin pallotteluihin ihmisvastustajaansa
Intuitiivisen robotiikan ja mukautettavan modulaarisen pakkauslinjan tulevaisuus Samuli Bergström, Tuotemarkkinointipäällikkö Pingisrobottimme kykenee pitkäkestoisiin pallotteluihin ihmisvastustajaansa
KONEAUTOMAATION LAATU JA TURVALLISUUS. 4.6.2015 Marko Varpunen
 KONEAUTOMAATION LAATU JA TURVALLISUUS 4.6.2015 Marko Varpunen TLJ ja automaatio Rautatie, metro, teollisuus-laitokset, kaivoskoneet, vesi, n. 90 henkeä Mikkeli Turvallisuusjohtaminen konsultointi riskienarviointi
KONEAUTOMAATION LAATU JA TURVALLISUUS 4.6.2015 Marko Varpunen TLJ ja automaatio Rautatie, metro, teollisuus-laitokset, kaivoskoneet, vesi, n. 90 henkeä Mikkeli Turvallisuusjohtaminen konsultointi riskienarviointi
Safety Integrated -turvatekniset perusratkaisut. Siemens Automation
 Safety Integrated -turvatekniset perusratkaisut Siemens Automation Itsenäisen koneen turvaratkaisu toteutetaan releellä, konetta ei ole kytketty väylään Select language Exit Sivu 2 Industry Sector Turvareleet
Safety Integrated -turvatekniset perusratkaisut Siemens Automation Itsenäisen koneen turvaratkaisu toteutetaan releellä, konetta ei ole kytketty väylään Select language Exit Sivu 2 Industry Sector Turvareleet
Liikenteen ja kuljetusten seuranta. Sami Luoma Tiehallinto - Liikenteen palvelut
 Liikenteen ja kuljetusten seuranta Sami Luoma Tiehallinto - Liikenteen palvelut 15.03.2001 Taustaa Liikenteen hallinnan toimintalinjat Peruspalvelut joukkotiedotus häiriön hallinta Painopiste ajantasainen
Liikenteen ja kuljetusten seuranta Sami Luoma Tiehallinto - Liikenteen palvelut 15.03.2001 Taustaa Liikenteen hallinnan toimintalinjat Peruspalvelut joukkotiedotus häiriön hallinta Painopiste ajantasainen
ENEMMÄN VAI FIKSUMMIN? - ÄLÄ TAPA UUSIA BISNESMAHDOLLISUUKSIA TEHOTTOMALLA TYÖLLÄ! Anssi Tikka, Business Unit Manager
 ENEMMÄN VAI FIKSUMMIN? - ÄLÄ TAPA UUSIA BISNESMAHDOLLISUUKSIA TEHOTTOMALLA TYÖLLÄ! Anssi Tikka, Business Unit Manager Näin saat palvelun laadun, nopeuden ja kannattavuuden kohtaamaan varastoissa ja logistiikkakeskuksissa.
ENEMMÄN VAI FIKSUMMIN? - ÄLÄ TAPA UUSIA BISNESMAHDOLLISUUKSIA TEHOTTOMALLA TYÖLLÄ! Anssi Tikka, Business Unit Manager Näin saat palvelun laadun, nopeuden ja kannattavuuden kohtaamaan varastoissa ja logistiikkakeskuksissa.
Agenda. Johdanto Säätäjiä. Mittaaminen. P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen
 8. Luento: Laitteiston ohjaaminen Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
8. Luento: Laitteiston ohjaaminen Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
Uusi siirtohyllystö kevyille kuormille
 HYLLYSTÖT TEHOKÄYTTÖÖN RFID-TEKNIIKALLA Uusi siirtohyllystö kevyille kuormille Sähköiset hyllyjärjestelmät Kaikki SCHÄFERin varasto- ja hyllyjärjestelmät voidaan asentaa siirrettäville alustoille. Periaate
HYLLYSTÖT TEHOKÄYTTÖÖN RFID-TEKNIIKALLA Uusi siirtohyllystö kevyille kuormille Sähköiset hyllyjärjestelmät Kaikki SCHÄFERin varasto- ja hyllyjärjestelmät voidaan asentaa siirrettäville alustoille. Periaate
Hiab XS 044 Kapasiteettiluokka 3,7 4,0 tm
 Hiab XS 044 Kapasiteettiluokka 3,7 4,0 tm Tuote-esite Ylivoimaista ulottuvuutta Hiab XS 044 on täydellinen nosturikokemus Hiab on aina yhdistetty korkeaan laatuun ja jatkuvaan kehitykseen. Erityisen ulottuvaksi
Hiab XS 044 Kapasiteettiluokka 3,7 4,0 tm Tuote-esite Ylivoimaista ulottuvuutta Hiab XS 044 on täydellinen nosturikokemus Hiab on aina yhdistetty korkeaan laatuun ja jatkuvaan kehitykseen. Erityisen ulottuvaksi
Hiab 211W Kapasiteetti 21 tm
 Hiab 211W Kapasiteetti 21 tm Tuote-esite Tekee kierrätyksestä helpompaa Nopea ja kompakti Hiabin XS 211W HiPro on erityisesti kevyempiin kierrätystöihin suunniteltu 21 tm kapasiteettiluokan nosturi. XS
Hiab 211W Kapasiteetti 21 tm Tuote-esite Tekee kierrätyksestä helpompaa Nopea ja kompakti Hiabin XS 211W HiPro on erityisesti kevyempiin kierrätystöihin suunniteltu 21 tm kapasiteettiluokan nosturi. XS
Digitaalinen valmistaminen ja palvelut tulevaisuuden Suomessa
 TEKNOLOGIAN TUTKIMUSKESKUS VTT OY Digitaalinen valmistaminen ja palvelut tulevaisuuden Suomessa Josek-VTT, Älyä koneisiin ja palveluihin digitalisaation vaikutukset valmistavassa teollisuudessa 7.2.2017
TEKNOLOGIAN TUTKIMUSKESKUS VTT OY Digitaalinen valmistaminen ja palvelut tulevaisuuden Suomessa Josek-VTT, Älyä koneisiin ja palveluihin digitalisaation vaikutukset valmistavassa teollisuudessa 7.2.2017
Hiab XS 033 Kapasiteettiluokka 2,8 3,3 tm
 Hiab XS 033 Kapasiteettiluokka 2,8 3,3 tm Tuote-esite Monipuolinen työkalu Hiab XS 033 tarjoaa enemmän Hiab XS 033 on päivittäisiin töihin sopiva suorituskykyinen ja joustava nosturi, jota on kätevä käyttää.
Hiab XS 033 Kapasiteettiluokka 2,8 3,3 tm Tuote-esite Monipuolinen työkalu Hiab XS 033 tarjoaa enemmän Hiab XS 033 on päivittäisiin töihin sopiva suorituskykyinen ja joustava nosturi, jota on kätevä käyttää.
Turvallisuus koneautomaatiossa
 Turvallisuus koneautomaatiossa Uusittu konedirektiivi ja sen soveltaminen Koneen valmistajan velvollisuudet Kone- ja pienjännitedirektiivin soveltaminen Koneyhdistelmä Koneen dokumentit ja CE -merkintä
Turvallisuus koneautomaatiossa Uusittu konedirektiivi ja sen soveltaminen Koneen valmistajan velvollisuudet Kone- ja pienjännitedirektiivin soveltaminen Koneyhdistelmä Koneen dokumentit ja CE -merkintä
VARAAJAT JATKAVAT MATKAA
 HAWKER MODULAARISET VARAAJAT JATKAVAT MATKAA VAIKKA OSA JOUKKUEESTA PUUTTUISIKIN... MODULAR: ASETTAA UUDEN STANDARDIN HUIPPUTEHOKAS JA LUOTETTAVA Varaajan algoritmi hallinnoi moduuleja, jotka tarvitsee
HAWKER MODULAARISET VARAAJAT JATKAVAT MATKAA VAIKKA OSA JOUKKUEESTA PUUTTUISIKIN... MODULAR: ASETTAA UUDEN STANDARDIN HUIPPUTEHOKAS JA LUOTETTAVA Varaajan algoritmi hallinnoi moduuleja, jotka tarvitsee
Toiminnallinen turvallisuus
 Toiminnallinen turvallisuus Mitä uutta standardeissa IEC 61508 Tekn.lis. Matti Sundquist, Sundcon Oy www.sundcon.fi matti.sundquist@sundcon.fi Mitä uutta standardeissa IEC 61508-1 ja -4? IEC 61508-1 (yleistä):
Toiminnallinen turvallisuus Mitä uutta standardeissa IEC 61508 Tekn.lis. Matti Sundquist, Sundcon Oy www.sundcon.fi matti.sundquist@sundcon.fi Mitä uutta standardeissa IEC 61508-1 ja -4? IEC 61508-1 (yleistä):
Keräilyrobotit. Helander, Koskimäki, Saari, Turunen. Aalto-yliopisto Insinööritieteiden korkeakoulu Kon Tuotantoautomaatio
 Keräilyrobotit Helander, Koskimäki, Saari, Turunen Aalto-yliopisto Insinööritieteiden korkeakoulu Kon-15.4119 Tuotantoautomaatio 21.10.2015 Agenda 1. Yleistä robotisoinnista 2. Keräilyrobotit - Nivelvarsirobotti
Keräilyrobotit Helander, Koskimäki, Saari, Turunen Aalto-yliopisto Insinööritieteiden korkeakoulu Kon-15.4119 Tuotantoautomaatio 21.10.2015 Agenda 1. Yleistä robotisoinnista 2. Keräilyrobotit - Nivelvarsirobotti
TAURUS Speed Rivet-niittaustyökalut ja G-Speed -vetoniitit
 TAURUS Speed Rivet-niittaustyökalut ja G-Speed -vetoniitit GESIPA G-Speed GESIPA -uutuus, G-Speed -vetoniitti, tarjoaa nopeutta ja luotettavuutta liittessä metallia, muovia, komposiittimateriaaleja sekä
TAURUS Speed Rivet-niittaustyökalut ja G-Speed -vetoniitit GESIPA G-Speed GESIPA -uutuus, G-Speed -vetoniitti, tarjoaa nopeutta ja luotettavuutta liittessä metallia, muovia, komposiittimateriaaleja sekä
Hissimatkustajien automaattinen tunnistaminen. Johan Backlund
 Hissimatkustajien automaattinen tunnistaminen Johan Backlund Johdanto Hissien historia pitkä Ensimmäiset maininnat voidaan jäljittää Rooman valtakuntaan Matkustaja hissien synty 1800-luvun puolessavälissä
Hissimatkustajien automaattinen tunnistaminen Johan Backlund Johdanto Hissien historia pitkä Ensimmäiset maininnat voidaan jäljittää Rooman valtakuntaan Matkustaja hissien synty 1800-luvun puolessavälissä
Mekatroniikan tutkimusverkoston kehittäminen Raumalla, METURA
 3.12.2015 1 Mekatroniikan tutkimusverkoston kehittäminen Raumalla, METURA 2 3 Mekatroniikka? Mekatroniikka tulee sanoista mekaniikka ja elektroniikka. Mekatroniikka termi keksittiin Japanissa 1970-luvulla,
3.12.2015 1 Mekatroniikan tutkimusverkoston kehittäminen Raumalla, METURA 2 3 Mekatroniikka? Mekatroniikka tulee sanoista mekaniikka ja elektroniikka. Mekatroniikka termi keksittiin Japanissa 1970-luvulla,
We move everything. Tekniikan Trendit 2016
 We move everything 1 Monta teknologiaa. Yksi ratkaisu. 2 Hydrauliikka Koneikot Pumput Perusventtiilit Säätöventtiilit Venttiiliryhmät Venttiiliohjaimet Akseliohjaimet Sylinterit Nopeakäyntiset moottorit
We move everything 1 Monta teknologiaa. Yksi ratkaisu. 2 Hydrauliikka Koneikot Pumput Perusventtiilit Säätöventtiilit Venttiiliryhmät Venttiiliohjaimet Akseliohjaimet Sylinterit Nopeakäyntiset moottorit
Valmistusautomaation uudet mahdollisuudet
 Valmistusautomaation uudet mahdollisuudet Kari Ollila Oy www.cimsolar.com 1 Oy Perustettu 1.1.2008 Pohjana Cimcorp Oy:n 2006-2007 tekemä kehitystyö ohutkalvotekniikalla valmistettavien aurinkosähköpaneelien
Valmistusautomaation uudet mahdollisuudet Kari Ollila Oy www.cimsolar.com 1 Oy Perustettu 1.1.2008 Pohjana Cimcorp Oy:n 2006-2007 tekemä kehitystyö ohutkalvotekniikalla valmistettavien aurinkosähköpaneelien
ZigBee-ohjaus kuorma-autolle
 ZigBee-ohjaus kuorma-autolle Juho Frits Petteri Koivumäki 10. helmikuuta 2010 Tavoitteet Projektityössä on tavoitteena rakentaa langaton ZigBee-ohjausverkko kaukoohjattavalle kuorma-autolle (kts. Kuva
ZigBee-ohjaus kuorma-autolle Juho Frits Petteri Koivumäki 10. helmikuuta 2010 Tavoitteet Projektityössä on tavoitteena rakentaa langaton ZigBee-ohjausverkko kaukoohjattavalle kuorma-autolle (kts. Kuva
Palautuslaite Boomerang ZHR
 Boomerang palautuslaitteen avulla yksi mies voi käyttää listoituskoneita ja/tai muita koneita ja laitteita puuntyöstössä. Ominaisuudet Arvot Työkappaleen mitat ilman kääntöyks. (mm) Pituus min. 300 max.
Boomerang palautuslaitteen avulla yksi mies voi käyttää listoituskoneita ja/tai muita koneita ja laitteita puuntyöstössä. Ominaisuudet Arvot Työkappaleen mitat ilman kääntöyks. (mm) Pituus min. 300 max.
TRANSSMART ÄLYKKÄIDEN LIIKENNEPALVELUIDEN KEHITTÄMINEN. Helsinki 10.10.2013, Matti Roine, johtava tutkija, VTT
 TRANSSMART ÄLYKKÄIDEN LIIKENNEPALVELUIDEN KEHITTÄMINEN Helsinki 10.10.2013, Matti Roine, johtava tutkija, VTT ÄLYKÄS JA VÄHÄHIILISTÄ ENERGIAA KÄYTTÄVÄ LIIKENNE VTT:N LIIKENTEEN KÄRKIOHJELMA 2013 - Liikenteen
TRANSSMART ÄLYKKÄIDEN LIIKENNEPALVELUIDEN KEHITTÄMINEN Helsinki 10.10.2013, Matti Roine, johtava tutkija, VTT ÄLYKÄS JA VÄHÄHIILISTÄ ENERGIAA KÄYTTÄVÄ LIIKENNE VTT:N LIIKENTEEN KÄRKIOHJELMA 2013 - Liikenteen
Robottihitsauksen koulutus asiantuntija- ja operaattoritasoille 19.9.2007 8.2.2008, Turku
 Robottihitsauksen koulutus asiantuntija- ja operaattoritasoille 19.9.2007 8.2.2008, Turku Tule suorittamaan kansainvälisesti hyväksytty robottihitsauksen koulutuskokonaisuus ja tutkinto. Tutkintoa voi
Robottihitsauksen koulutus asiantuntija- ja operaattoritasoille 19.9.2007 8.2.2008, Turku Tule suorittamaan kansainvälisesti hyväksytty robottihitsauksen koulutuskokonaisuus ja tutkinto. Tutkintoa voi
Hiab XS 033 Kapasiteettiluokka 2,8 3,3 tm
 Hiab XS 033 Kapasiteettiluokka 2,8 3,3 tm Tuote-esite Monipuolinen työkalu Hiab XS 033 tarjoaa enemmän Hiab XS 033 on päivittäisiin töihin sopiva suorituskykyinen ja joustava nosturi, jota on kätevä käyttää.
Hiab XS 033 Kapasiteettiluokka 2,8 3,3 tm Tuote-esite Monipuolinen työkalu Hiab XS 033 tarjoaa enemmän Hiab XS 033 on päivittäisiin töihin sopiva suorituskykyinen ja joustava nosturi, jota on kätevä käyttää.
Hitsaavan tuotannon tehostaminen SUUNNITTELEE JA VALMISTAA
 Hitsaavan tuotannon tehostaminen SUUNNITTELEE JA VALMISTAA Hitsaavan tuotannon tehostaminen TEHDASSUUNNITTELU / HITSAUKSEN TYÖPISTEET / KOKOONPANON TYÖPISTEET Miksi Suomessa ei ole taantuma, vaan menossa
Hitsaavan tuotannon tehostaminen SUUNNITTELEE JA VALMISTAA Hitsaavan tuotannon tehostaminen TEHDASSUUNNITTELU / HITSAUKSEN TYÖPISTEET / KOKOONPANON TYÖPISTEET Miksi Suomessa ei ole taantuma, vaan menossa
sawmill solutions FIN yleisesite
 sawmill solutions FIN yleisesite sahaus ja särmäys N sahalinjaosaaminen on kehittynyt jo yli 50 vuoden toimitusten perinteistä. n toimitusohjelma kattaa sahauksen linjaratkaisut ja niiden edellyttämät
sawmill solutions FIN yleisesite sahaus ja särmäys N sahalinjaosaaminen on kehittynyt jo yli 50 vuoden toimitusten perinteistä. n toimitusohjelma kattaa sahauksen linjaratkaisut ja niiden edellyttämät
Metso MX. Multi-Action-kartiomurskain
 Metso MX Multi-Action-kartiomurskain Metso MX Multi-Action-kartiomurskain +10 % parempi käyttöaste 10 % pienemmät käyttökulut Kulutusosista hyödynnetään jopa 70 % Multi-Actionteknologia Valikoiva tuotanto
Metso MX Multi-Action-kartiomurskain Metso MX Multi-Action-kartiomurskain +10 % parempi käyttöaste 10 % pienemmät käyttökulut Kulutusosista hyödynnetään jopa 70 % Multi-Actionteknologia Valikoiva tuotanto
SIMULOINTIYMPÄRISTÖJEN SOVELTAMINEN OPETUKSESSA SIMULOINNILLA TUOTANTOA KEHITTÄMÄÄN-SEMINAARI TIMO SUVELA
 SOVELTAMINEN OPETUKSESSA SIMULOINNILLA TUOTANTOA KEHITTÄMÄÄN-SEMINAARI 2.12. TIMO SUVELA KUKA OLEN? Timo Suvela lehtori, sähkö- ja automaatiotekniikka (timo.suvela@samk.fi, 044-7103275) Nykyisyys SAMK:iin
SOVELTAMINEN OPETUKSESSA SIMULOINNILLA TUOTANTOA KEHITTÄMÄÄN-SEMINAARI 2.12. TIMO SUVELA KUKA OLEN? Timo Suvela lehtori, sähkö- ja automaatiotekniikka (timo.suvela@samk.fi, 044-7103275) Nykyisyys SAMK:iin
MACHINERY on laadunvarmistaja
 MACHINERY on laadunvarmistaja Mitä tapahtuu huomenna? entä jos omaisuudelle tapahtuu jotain? entä jos kalustolle tapahtuu jotain? entä jos sinulle tapahtuu jotain? MACHINERY ennakoi, ennaltaehkäisee ja
MACHINERY on laadunvarmistaja Mitä tapahtuu huomenna? entä jos omaisuudelle tapahtuu jotain? entä jos kalustolle tapahtuu jotain? entä jos sinulle tapahtuu jotain? MACHINERY ennakoi, ennaltaehkäisee ja
www.kastowin.com Sahaus. Varastointi. Ja enemmän.
 Uusi KASTOwin Mestariteos sarjatuotantona www.astowin.com Sahaus. Varastointi. Ja enemmän. Enemmän uin ainutlaatuinen: Uusi KASTOwin. Kannattavan automaattisahausen asi täreintä teijää ovat: suuri leuuteho
Uusi KASTOwin Mestariteos sarjatuotantona www.astowin.com Sahaus. Varastointi. Ja enemmän. Enemmän uin ainutlaatuinen: Uusi KASTOwin. Kannattavan automaattisahausen asi täreintä teijää ovat: suuri leuuteho
WGS - Quick-Lock-pikavaihtojärjestelmä
 B:01 WGS Quick-Lock-pikavaihtojärjestelmän etuja WGS Quick-Lock-järjestelmä koostuu kahdesta osasta. Yksi osa (WGS QLRD) asennetaan robottiin ja toiseen osaan (WGS-QLGD) rakennat tarttujasi. Tarttujan
B:01 WGS Quick-Lock-pikavaihtojärjestelmän etuja WGS Quick-Lock-järjestelmä koostuu kahdesta osasta. Yksi osa (WGS QLRD) asennetaan robottiin ja toiseen osaan (WGS-QLGD) rakennat tarttujasi. Tarttujan
Robotit ja tekoäly terveydenhuollon työvälineinä nyt ja tulevaisuudessa työn tutkimukseen perustuva näkökulma
 VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD Robotit ja tekoäly terveydenhuollon työvälineinä nyt ja tulevaisuudessa työn tutkimukseen perustuva näkökulma Mikael Wahlström, VTT Erikoistutkija, valtiot.
VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD Robotit ja tekoäly terveydenhuollon työvälineinä nyt ja tulevaisuudessa työn tutkimukseen perustuva näkökulma Mikael Wahlström, VTT Erikoistutkija, valtiot.
Tarttujan pikavaihtojärjestelmän
 WGS - Quick-Lock Tarttujan pikavaihtojärjestelmän etuja WGS Quick-Lock-järjestelmä koostuu kahdesta osasta. Yksi osa (WGS-QLRD) asennetaan robottiin ja toiseen ( WGS- QLGD) rakennetaan tarttuja. Kun haluat
WGS - Quick-Lock Tarttujan pikavaihtojärjestelmän etuja WGS Quick-Lock-järjestelmä koostuu kahdesta osasta. Yksi osa (WGS-QLRD) asennetaan robottiin ja toiseen ( WGS- QLGD) rakennetaan tarttuja. Kun haluat
Digitaalisen tallennuksen edelläkävijä
 Digitaalisen tallennuksen edelläkävijä NUUO digitaalitallentimet edustavat analogisen ja IP-pohjaisen videovalvonnan uusinta teknologiaa. NUUO tarjoaa kehittyneitä ratkaisuja kameravalvonnan lisäksi myös
Digitaalisen tallennuksen edelläkävijä NUUO digitaalitallentimet edustavat analogisen ja IP-pohjaisen videovalvonnan uusinta teknologiaa. NUUO tarjoaa kehittyneitä ratkaisuja kameravalvonnan lisäksi myös
Tuotannon simulointi. Teknologiademot on the road -hanke
 Tuotannon simulointi Teknologiademot on the road -hanke Simulointi Seamkissa Tuotannon simulointia on tarjottu palvelutoimintana yrityksille 90-luvun puolivälistä lähtien. Toteutettuja yritysprojekteja
Tuotannon simulointi Teknologiademot on the road -hanke Simulointi Seamkissa Tuotannon simulointia on tarjottu palvelutoimintana yrityksille 90-luvun puolivälistä lähtien. Toteutettuja yritysprojekteja
Virtuoosi POS-järjestelmien joukossa
 Virtuoosi POS-järjestelmien joukossa Menestyvä liiketoiminta muistuttaa monin osin huippuunsa viritettyä orkesteria jossa eri osien sopusuhtainen vuorovaikutus ja integrointi luovat sykähdyttävän esityksen.
Virtuoosi POS-järjestelmien joukossa Menestyvä liiketoiminta muistuttaa monin osin huippuunsa viritettyä orkesteria jossa eri osien sopusuhtainen vuorovaikutus ja integrointi luovat sykähdyttävän esityksen.
Uudet tekniikat ja palvelut vastaavat sisälogistiikan muuttuneisiin tarpeisiin
 Toyota Material Handling Finland Oy Optiscan-asiakasseminaari Uudet tekniikat ja palvelut vastaavat sisälogistiikan muuttuneisiin tarpeisiin 08.10.2015 1 TOYOTA MATERIAL HANDLING FINLAND - Keitä olemme?
Toyota Material Handling Finland Oy Optiscan-asiakasseminaari Uudet tekniikat ja palvelut vastaavat sisälogistiikan muuttuneisiin tarpeisiin 08.10.2015 1 TOYOTA MATERIAL HANDLING FINLAND - Keitä olemme?
geodyna 6800 optima tasapainottamisen uusi standardi
 geodyna 6800 optima tasapainottamisen uusi standardi Täysautomaattinen tasapainotuskone 3 D-laserteknologialla Mikä on GEODYNA 6800 OPTIMA geodyna 6800 optima on täysautomaattinen pyörän tasapainotuskone
geodyna 6800 optima tasapainottamisen uusi standardi Täysautomaattinen tasapainotuskone 3 D-laserteknologialla Mikä on GEODYNA 6800 OPTIMA geodyna 6800 optima on täysautomaattinen pyörän tasapainotuskone
ERP, joka menestyy muutoksessa
 ERP, joka menestyy muutoksessa Se joustavampi ERP Agresso on toiminnanohjausjärjestelmä, joka tukee dynaamisten organisaatioiden kehitystä nopeasti muuttuvassa ympäristössä. Ohjelmistokehityksen tavoitteena
ERP, joka menestyy muutoksessa Se joustavampi ERP Agresso on toiminnanohjausjärjestelmä, joka tukee dynaamisten organisaatioiden kehitystä nopeasti muuttuvassa ympäristössä. Ohjelmistokehityksen tavoitteena
Älykkään vesihuollon järjestelmät
 Älykkään vesihuollon järjestelmät Älykkään vesihuollon järjestelmät fcgsmart.fi Älykäs vesihuolto 6. Organisaatio, johtaminen ja asiakaspalvelu 5. Tiedon yhdistäminen ja analysointi 4. Tiedon hallinta
Älykkään vesihuollon järjestelmät Älykkään vesihuollon järjestelmät fcgsmart.fi Älykäs vesihuolto 6. Organisaatio, johtaminen ja asiakaspalvelu 5. Tiedon yhdistäminen ja analysointi 4. Tiedon hallinta
ABB Drives and Controls, 26.05.2015 Koneenrakentajan ja laitetoimittajan yhteistoiminta toiminnallisen turvallisuuden varmistamisessa
 ABB Drives and Controls, 26.05.2015 Koneenrakentajan ja laitetoimittajan yhteistoiminta toiminnallisen turvallisuuden varmistamisessa Sisältö 1. Koneenrakentajan haasteita koneiden turvallistamisessa 2.
ABB Drives and Controls, 26.05.2015 Koneenrakentajan ja laitetoimittajan yhteistoiminta toiminnallisen turvallisuuden varmistamisessa Sisältö 1. Koneenrakentajan haasteita koneiden turvallistamisessa 2.
TSZ-uni ja TSZ-maxi -reunakivi tarraimet
 Reunakivien konenostot TSZ-uni TSZ-maxi TSZ-uni ja TSZ-maxi -reunakivi tarraimet TSZ-uni Kiinnitä tarrain suuresta nostolenkistä nostimeen tai kaivinkoneeseen ja voit heti nostaa reunakiviä ja muita elementtejä
Reunakivien konenostot TSZ-uni TSZ-maxi TSZ-uni ja TSZ-maxi -reunakivi tarraimet TSZ-uni Kiinnitä tarrain suuresta nostolenkistä nostimeen tai kaivinkoneeseen ja voit heti nostaa reunakiviä ja muita elementtejä
Pakkauksen sisältö. 1. Unimouse 2. Käyttöopas. Unimouse Wired
 Käyttöohje Wired Pakkauksen sisältö 1. Unimouse 2. Käyttöopas 2 1 /1 Unimousen toiminnot Vieritysrulla/-painike Vasen painike Keskipainike* Oikea painike Perusasento/kallistus Johto Taaksepäin-painike
Käyttöohje Wired Pakkauksen sisältö 1. Unimouse 2. Käyttöopas 2 1 /1 Unimousen toiminnot Vieritysrulla/-painike Vasen painike Keskipainike* Oikea painike Perusasento/kallistus Johto Taaksepäin-painike
Enterprise SOA. Nyt. Systeemi-integraattorin näkökulma
 Enterprise SOA. Nyt. Systeemi-integraattorin näkökulma 12.11.2007 Janne J. Korhonen 12.11.2007 Agenda 1. Prosessit ja palvelut, BPM ja SOA 2. BPM-projekteista yleensä 3. Prosessin elinkaarimalli 4. Kokemuksia
Enterprise SOA. Nyt. Systeemi-integraattorin näkökulma 12.11.2007 Janne J. Korhonen 12.11.2007 Agenda 1. Prosessit ja palvelut, BPM ja SOA 2. BPM-projekteista yleensä 3. Prosessin elinkaarimalli 4. Kokemuksia
JOUSTAVA YKSITTÄISVALMISTUS. Konepajamiehet 19.4.2011 Kauko Lappalainen
 JOUSTAVA YKSITTÄISVALMISTUS Konepajamiehet 19.4.2011 Joustava yksittäisvalmistusautomaatio Target Erävalmistuksen ja yksittäisvalmistuksen tavoitteiden erot Toistuva erävalmistus tai volyymituotanto tuotantolaitteiston
JOUSTAVA YKSITTÄISVALMISTUS Konepajamiehet 19.4.2011 Joustava yksittäisvalmistusautomaatio Target Erävalmistuksen ja yksittäisvalmistuksen tavoitteiden erot Toistuva erävalmistus tai volyymituotanto tuotantolaitteiston
Verkkodatalehti. C4P-SA13510A001000, C4P- EA13510A detec TURVAVALOVERHOT
 Verkkodatalehti C4P-SA13510A001000, C4P- EA13510A001000 detec A B C D E F Esimerkkikuva Tilaustiedot Järjestelmäosa Tyyppi Tuotenumero Lähetin C4P-SA13510A001000 1215663 Vastaanotin C4P-EA13510A001000
Verkkodatalehti C4P-SA13510A001000, C4P- EA13510A001000 detec A B C D E F Esimerkkikuva Tilaustiedot Järjestelmäosa Tyyppi Tuotenumero Lähetin C4P-SA13510A001000 1215663 Vastaanotin C4P-EA13510A001000
MITTAUS JA DIGITOINTI. smartscan M I T T A A E T U S I. AICON 3D Systems yritys
 MITTAUS JA DIGITOINTI smartscan M I T T A A E T U S I AICON 3D Systems yritys smartscan Sarja joustavia järjestelmiä suuren tarkkuuden 3D mittaukseen smartscan järjestelmät kaappaavat mittauskohteittesi
MITTAUS JA DIGITOINTI smartscan M I T T A A E T U S I AICON 3D Systems yritys smartscan Sarja joustavia järjestelmiä suuren tarkkuuden 3D mittaukseen smartscan järjestelmät kaappaavat mittauskohteittesi
Riskin arviointi. Peruskäsitteet- ja periaatteet. Standardissa IEC esitetyt menetelmät
 Ylitarkastaja Matti Sundquist Uudenmaan työsuojelupiiri Riskin arviointi Peruskäsitteet- ja periaatteet Standardissa IEC 61508-5 esitetyt menetelmät matti.sundquist@stm.vn.fi 2.9.2004 1 Toiminnallinen
Ylitarkastaja Matti Sundquist Uudenmaan työsuojelupiiri Riskin arviointi Peruskäsitteet- ja periaatteet Standardissa IEC 61508-5 esitetyt menetelmät matti.sundquist@stm.vn.fi 2.9.2004 1 Toiminnallinen
Kysyntäjousto Fingridin näkökulmasta. Tasevastaavailtapäivä 20.11.2014 Helsinki Jonne Jäppinen
 Kysyntäjousto Fingridin näkökulmasta Tasevastaavailtapäivä 20.11.2014 Helsinki Jonne Jäppinen 2 Sähköä ei voi varastoida: Tuotannon ja kulutuksen välinen tasapaino on pidettävä yllä joka hetki! Vuorokauden
Kysyntäjousto Fingridin näkökulmasta Tasevastaavailtapäivä 20.11.2014 Helsinki Jonne Jäppinen 2 Sähköä ei voi varastoida: Tuotannon ja kulutuksen välinen tasapaino on pidettävä yllä joka hetki! Vuorokauden
XCRANE OMINAISUUDET KUUSI KULJETTAJA-PROFIILIA VENTTIILIEN SÄÄDÖT
 XCRANE OMINAISUUDET KUUSI KULJETTAJA-PROFIILIA Jokaiseen kuljettajaprofiiliin voi tallentaa omat säädöt seuraaville ominaisuuksille Venttiilin parametrit o Miniminopeus (ma) o Maksiminopeus (%) o Rampit
XCRANE OMINAISUUDET KUUSI KULJETTAJA-PROFIILIA Jokaiseen kuljettajaprofiiliin voi tallentaa omat säädöt seuraaville ominaisuuksille Venttiilin parametrit o Miniminopeus (ma) o Maksiminopeus (%) o Rampit
Green Means -esimerkkejä. Prima Power Green Means kestävästi tuottavaa tulevaisuutta
 Prima Power Green Means kestävästi tuottavaa tulevaisuutta Prima Power -tuoteohjelman jatkuvalla kehittämisellä on pitkät perinteet. Päämäärinä ovat olleet suurempi joustavuus ja parempi käyttötalous,
Prima Power Green Means kestävästi tuottavaa tulevaisuutta Prima Power -tuoteohjelman jatkuvalla kehittämisellä on pitkät perinteet. Päämäärinä ovat olleet suurempi joustavuus ja parempi käyttötalous,
Äänellä vauhtia robottiin
 Äänellä vauhtia robottiin Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla robotti, joka väistää esteitä ja kulkee sitä nopeampaa mitä kovempi ääni sen lähistöllä on. Robotti tunnistaa esteet
Äänellä vauhtia robottiin Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla robotti, joka väistää esteitä ja kulkee sitä nopeampaa mitä kovempi ääni sen lähistöllä on. Robotti tunnistaa esteet
KUITUPOHJAISTEN PAKKAUSTEN MUODONANTO
 KUITUPOHJAISTEN PAKKAUSTEN MUODONANTO Professori Juha Varis Lappeenrannan teknillinen yliopisto TAUSTAA Lappeenrannan teknillisen yliopiston Konepajatekniikanja levytyötekniikan laboratorio ja Stora Enso
KUITUPOHJAISTEN PAKKAUSTEN MUODONANTO Professori Juha Varis Lappeenrannan teknillinen yliopisto TAUSTAA Lappeenrannan teknillisen yliopiston Konepajatekniikanja levytyötekniikan laboratorio ja Stora Enso
Beta 90X KESTÄVÄ, MUKAVA JA MONIPUOLINEN
 Beta 90X KESTÄVÄ, MUKAVA JA MONIPUOLINEN 26.12.2018 Beta 90X SUOJA HITSAUKSEEN, KATKAISUUN JA HIONTAAN Hitsauksen ammattilaisille suunnitellut Beta-kypärät on sertifioitu standardin EN175 B mukaisesti
Beta 90X KESTÄVÄ, MUKAVA JA MONIPUOLINEN 26.12.2018 Beta 90X SUOJA HITSAUKSEEN, KATKAISUUN JA HIONTAAN Hitsauksen ammattilaisille suunnitellut Beta-kypärät on sertifioitu standardin EN175 B mukaisesti
GuardShield Micro 400 /Micro400 IP
 GuardShield Micro 400 /Micro400 IP Valoverhoja on saatavana 150mm..1200mm korkeita 150mm jaolla. Pienen kokonsa ansiosta valoverho voidaan helposti asentaa esimerkiksi koneen tukirakenteiden väliin, minne
GuardShield Micro 400 /Micro400 IP Valoverhoja on saatavana 150mm..1200mm korkeita 150mm jaolla. Pienen kokonsa ansiosta valoverho voidaan helposti asentaa esimerkiksi koneen tukirakenteiden väliin, minne
Verkkodatalehti. FX3-MOC Flexi Soft / Safe EFI-pro System TURVAOHJAIMET / TURVAJÄRJESTELMÄT
 Verkkodatalehti FX3-MOC100000 Flexi Soft / Safe EFI-pro System A B C D E F H I J K L M N O P Q R S T Yksityiskohtaiset tekniset tiedot Ominaisuudet Moduuli Konfiguraatiotapa Turvatekniset ominaisuudet
Verkkodatalehti FX3-MOC100000 Flexi Soft / Safe EFI-pro System A B C D E F H I J K L M N O P Q R S T Yksityiskohtaiset tekniset tiedot Ominaisuudet Moduuli Konfiguraatiotapa Turvatekniset ominaisuudet
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää
 Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Hiab XS 022 Kapasiteettiluokka 2,2 2,6 tm
 Hiab XS 022 Kapasiteettiluokka 2,2 2,6 tm Tuote-esite Toimiva ja suorituskykyinen Hiab XS 022 helpottaa päivittäistä työtä Hiab XS 022 on pieni, kompakti ja joustava nosturi monenlaisiin käyttötarkoituksiin.
Hiab XS 022 Kapasiteettiluokka 2,2 2,6 tm Tuote-esite Toimiva ja suorituskykyinen Hiab XS 022 helpottaa päivittäistä työtä Hiab XS 022 on pieni, kompakti ja joustava nosturi monenlaisiin käyttötarkoituksiin.
Verkkodatalehti. C4P-SA06010A00 detec TURVAVALOVERHOT
 Verkkodatalehti C4P-SA06010A00 detec A B C D E F H I J K L M N O P Q R S T Esimerkkikuva Yksityiskohtaiset tekniset tiedot Ominaisuudet Käyttöalue Järjestelmäosa Toimintaetäisyys Suojakentän korkeus Ei
Verkkodatalehti C4P-SA06010A00 detec A B C D E F H I J K L M N O P Q R S T Esimerkkikuva Yksityiskohtaiset tekniset tiedot Ominaisuudet Käyttöalue Järjestelmäosa Toimintaetäisyys Suojakentän korkeus Ei
ABLOY -kääntöovikoneistoilla toimintavarmuutta automaattiseen ovien avaamiseen ja sulkemiseen. Helppokulkuisuutta, joka lisää toimintojen sujuvuutta
 R ABLOY -kääntöovikoneistoilla toimintavarmuutta automaattiseen ovien avaamiseen ja sulkemiseen. Helppokulkuisuutta, joka lisää toimintojen sujuvuutta ja ihmisten viihtyvyyttä. Turvallisuutta, joka varmistaa
R ABLOY -kääntöovikoneistoilla toimintavarmuutta automaattiseen ovien avaamiseen ja sulkemiseen. Helppokulkuisuutta, joka lisää toimintojen sujuvuutta ja ihmisten viihtyvyyttä. Turvallisuutta, joka varmistaa
Uponor C-46 -lämmönsäädin. Säätilan mukaan kompensoituva ohjain vesikiertoisiin lämmitys- ja jäähdytysjärjestelmiin
 Uponor C-46 -lämmönsäädin Säätilan mukaan kompensoituva ohjain vesikiertoisiin lämmitys- ja jäähdytysjärjestelmiin Tuotteen kuvaus Luovaa tekniikkaa helppo asentaa ja käsitellä Uponorin C-46-lämmönsäädin
Uponor C-46 -lämmönsäädin Säätilan mukaan kompensoituva ohjain vesikiertoisiin lämmitys- ja jäähdytysjärjestelmiin Tuotteen kuvaus Luovaa tekniikkaa helppo asentaa ja käsitellä Uponorin C-46-lämmönsäädin
TSZ-uni ja TSZ-maxi -reunakivi tarraimet
 Reunakivien konenostot TSZ-uni TSZ-maxi TSZ-uni ja TSZ-maxi -reunakivi tarraimet TSZ-uni Kiinnitä tarrain nostimeen tai kaivinkoneeseen ja voit heti nostaa reunakiviä ja muita elementtejä helposti. Molemmissa
Reunakivien konenostot TSZ-uni TSZ-maxi TSZ-uni ja TSZ-maxi -reunakivi tarraimet TSZ-uni Kiinnitä tarrain nostimeen tai kaivinkoneeseen ja voit heti nostaa reunakiviä ja muita elementtejä helposti. Molemmissa
Press Brake Productivity -pikaopas
 Kuinka aloitat Press Brake Productivity -pikaopas Kiitos, että olet ostanut Wilan valmistaman laatutuotteen Wila on valmistanut jo yli 80 vuotta työkalunpitimiä, työkaluja ja varusteita särmäyspuristimien
Kuinka aloitat Press Brake Productivity -pikaopas Kiitos, että olet ostanut Wilan valmistaman laatutuotteen Wila on valmistanut jo yli 80 vuotta työkalunpitimiä, työkaluja ja varusteita särmäyspuristimien
Perustietoa yrityksestä
 1 Perustietoa yrityksestä Perustettu 1996 nimellä Koneistus Kailan Oy Perheyritys Liikevaihto 2015 5,6Meur Henkilöstöä tällä hetkellä 64 Tuotteet Erilaiset sorvaus- ja jyrsintäkappaleet Hydrauliikkalohkot
1 Perustietoa yrityksestä Perustettu 1996 nimellä Koneistus Kailan Oy Perheyritys Liikevaihto 2015 5,6Meur Henkilöstöä tällä hetkellä 64 Tuotteet Erilaiset sorvaus- ja jyrsintäkappaleet Hydrauliikkalohkot
Aloita COBOTIT HELPPOA VAIHETTA
 Aloita COBOTIT 10 HELPPOA VAIHETTA cobottien käytön aloittamiseen Kustannustehokkaat, turvalliset ja joustavat yhteistyörobotit cobotit, tekevät automaatiosta helpompaa kuin koskaan, jopa pienille ja keskisuurille
Aloita COBOTIT 10 HELPPOA VAIHETTA cobottien käytön aloittamiseen Kustannustehokkaat, turvalliset ja joustavat yhteistyörobotit cobotit, tekevät automaatiosta helpompaa kuin koskaan, jopa pienille ja keskisuurille
Nopeudenhallinnan nykytila ja mahdollisuudet, NOPHA
 Nopeudenhallinnan nykytila ja mahdollisuudet, NOPHA VTT Liikenne- ja logistiikkajärjestelmät Harri Peltola, Riikka Rajamäki & Juha Luoma Lähtökohdat nopeuksien hallinnalle Vaikutukset matka-aikaan, logistiikkaan,
Nopeudenhallinnan nykytila ja mahdollisuudet, NOPHA VTT Liikenne- ja logistiikkajärjestelmät Harri Peltola, Riikka Rajamäki & Juha Luoma Lähtökohdat nopeuksien hallinnalle Vaikutukset matka-aikaan, logistiikkaan,
FastMig X vie käsinhitsauksen laatustandardit uudelle tasolle
 FastMig X vie käsinhitsauksen laatustandardit uudelle tasolle Tämän hetken älykkäin MIG-hitsauslaite Hyödyntää tehokkaasti hitsaushallinnan ohjelmistoja (KAS) ja valokaaren ominaisuuksia parantavia Wise-ohjelmistotuotteita
FastMig X vie käsinhitsauksen laatustandardit uudelle tasolle Tämän hetken älykkäin MIG-hitsauslaite Hyödyntää tehokkaasti hitsaushallinnan ohjelmistoja (KAS) ja valokaaren ominaisuuksia parantavia Wise-ohjelmistotuotteita
A7 TIG Orbital System 150
 KEMPPI K7 HITSAUSLAITTEET A7 TIG Orbital System 150 ÄLYKÄSTÄ JA HELPPOA 1.10.2017 A7 TIG Orbital System 150 NÄPPÄRÄ RATKAISU MEKANISOITUUN PUTKIEN TIG- ORBITAALIHITSAUKSEEN Suljetulla hitsauspäällä varustettu
KEMPPI K7 HITSAUSLAITTEET A7 TIG Orbital System 150 ÄLYKÄSTÄ JA HELPPOA 1.10.2017 A7 TIG Orbital System 150 NÄPPÄRÄ RATKAISU MEKANISOITUUN PUTKIEN TIG- ORBITAALIHITSAUKSEEN Suljetulla hitsauspäällä varustettu
- Älykkäitä nostolaitteita
 Ergonomisia nostoapulaitteita ainutlaatuisella ohjattavuudella ja joustavalla käytettävyydellä. Quick-Lift TUOTTEET - Älykkäitä nostolaitteita Since 1912 OTA YHTEYTTÄ! (09) 221 90 530 sales@erikkila.com
Ergonomisia nostoapulaitteita ainutlaatuisella ohjattavuudella ja joustavalla käytettävyydellä. Quick-Lift TUOTTEET - Älykkäitä nostolaitteita Since 1912 OTA YHTEYTTÄ! (09) 221 90 530 sales@erikkila.com
-Motorracing Electronics WB-NÄYTTÖ KÄYTTÖOHJE. WB-näyttö Käyttöohje v1.0 12/2011 1/7
 WB-NÄYTTÖ KÄYTTÖOHJE 1/7 SISÄLLYSLUETTELO 1. YLEISTÄ... 3 1.1. SPESIFIKAATIO...3 2. ASENNUS... 4 2.1. MEKAANINEN ASENNUS...4 2.2. SÄHKÖINEN ASENNUS...4 3. KÄYTTÖOHJE... 6 3.1. INNOVATE LC-1 OHJELMOINTI...6
WB-NÄYTTÖ KÄYTTÖOHJE 1/7 SISÄLLYSLUETTELO 1. YLEISTÄ... 3 1.1. SPESIFIKAATIO...3 2. ASENNUS... 4 2.1. MEKAANINEN ASENNUS...4 2.2. SÄHKÖINEN ASENNUS...4 3. KÄYTTÖOHJE... 6 3.1. INNOVATE LC-1 OHJELMOINTI...6