ABSOLUUTTISEN PAIKANNUKSEN KÄYTTÖ KARTTA- TUOTANNOSSA
|
|
|
- Anja Ketonen
- 6 vuotta sitten
- Katselukertoja:
Transkriptio
1 ABSOLUUTTISEN PAIKANNUKSEN KÄYTTÖ KARTTA- TUOTANNOSSA Kultalahti Eetu Opinnäytetyö Tekniikka ja liikenne Maanmittaustekniikka Insinööri (AMK) 2018
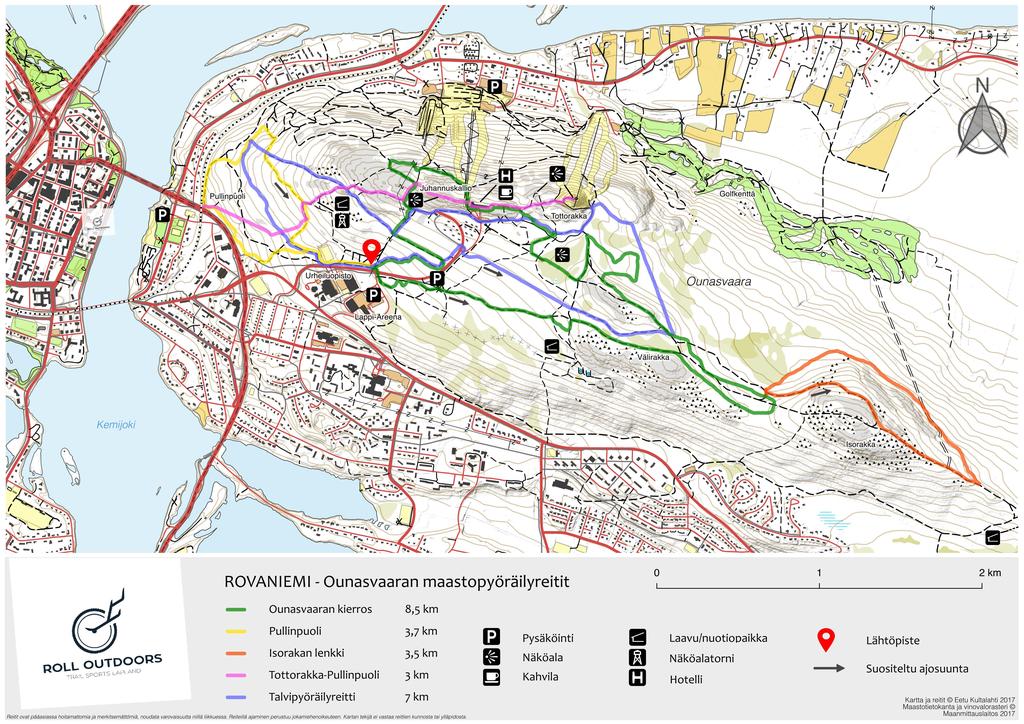
2 Opinnäytetyön tiivistelmä Tekniikka ja liikenne Maanmittaustekniikka Insinööri (AMK) Tekijä Eetu Kultalahti Vuosi 2018 Ohjaaja(t) Sami Porsanger Toimeksiantaja Roll Outdoors Työn nimi Absoluuttisen paikannuksen käyttö karttatuotannossa Sivu- ja liitesivumäärä Tässä opinnäytetyössä oli tarkoitus tutkia absoluuttisen paikannuksen ominaisuuksien riittävyyttä karttatuotannossa tehtävään paikannukseen. Työn lähtökohtana oli tarve saada luotua opaskartta Rovaniemen maastopyöräilyreiteistä. Työn tarkoituksena oli siis selvittää, riittääkö muun muassa matkapuhelimissa ja urheilukelloissa käytettävän paikannusmenetelmän tarkkuus tällaisen opaskartan reittien kartoittamiseen. Työssä myös pohdittiin menetelmän etuja ja haittoja verrattuna muihin, yleisemmin maanmittaustekniikan alalla, käytettyihin menetelmiin. Tämän työn teoriaosuudessa käytiin läpi GPS-paikannuksen teoriaa ja erilaisia paikannusmenetelmiä. Teoriaosuuden tarkoitus oli esitellä lukijalle satelliittipaikannuksen perusteet ja yleisesti käytetyt menetelmät ja niiden eroavaisuudet. Käytännön mittaukset suoritettiin käyttäen kahta erilaista paikannusvälinettä, urheilukelloa sekä älypuhelinta. Reitit kartoitettiin asettamalla molemmat paikantimet tallentamaan sijaintiaan sekunnin välein. Näistä peräkkäisistä paikannuksista laitteet muodostivat jäljen eli yhtenäisen viivan, joka kuvaa niiden kulkemaa reittiä. Opaskartta luotiin vapaan lähdetiedon ohjelmalla nimeltä QGIS. Kartan tekemiseen käytettiin Maanmittauslaitoksen tarjoamaa Maastotietokantaa, jota suodattamalla ja visualisoimalla saatiin luotua lopullinen kartta. Lopuksi kartalle sijoitettiin kartoitetut reitit ja luotiin kartasta yhtenäinen, selkeä kokonaisuus. Lähtökohtaisesti oli tiedossa, että absoluuttisen paikannuksen tarkkuus on heikompi, kuin yleisesti kartoitukseen käytetyissä menetelmissä. Kartoituksien tarkkuutta tarkasteltaessa kuitenkin huomattiin, että paikannuksen virheet pysyvät kohtuullisen pieninä. Paikannukset suoritettiin samanaikaisesti kahdella eri laitteella ja niiden dataa tarkastelemalla todettiin virheiden pysyvän reilusti alle 10m luokassa, joka ei ole tällaisessa kartassa ongelma. Absoluuttista paikannusta käyttävien laitteiden hinnan ja käytön helppouden sekä kartoituksen tarkkuuden perusteella menetelmä on hyvin sovellettavissa tällaiseen karttatuotantoon. Avainsanat Muita tietoja satelliittipaikannus, paikkatieto, kartta, GPS, QGIS, älypuhelin Työhön liittyy erillinen kartta.

3 Abstract of Thesis Technology, Communication and Transport Land Surveying Bachelor of Engineering Author Eetu Kultalahti Year 2018 Supervisor Sami Porsanger Commissioned by Roll Outdoors Subject of thesis Absolute Positioning as a Method for Trail Mapping Number of pages This thesis was written to study if the positioning accuracy of absolute positioning is accurate enough to use for mapping trails for a mountain biking map. The intention was also to discuss about the pros and cons of the used method. The thesis began with the basic theory of the GPS positioning. The trails were surveyed with two different GPS receivers to be able to compare the accuracy of the data. The map was then created with an open-source software called QGIS. The downloaded data for the map was filtered and visualized to form an informative map. The surveyed routes were then placed on the map with some other useful information to create a proper map. It was known that absolute positioning is much less accurate than some other methods. However, the biggest errors found in the data were way under 10 meters which is not a problem in a map like this. When taking account the price and the ease of use of absolute positioning it is a really suitable method for surveying trails for a map. Keywords Special remarks satellite positioning, mapping, GPS, QGIS, smartphone The thesis includes an separate map.
4 4 SISÄLLYS 1 2 JOHDANTO... 6 GPS-PAIKANNUS GPS-paikannuksen toimintaperiaate GPS-järjestelmän osat Paikannusmenetelmät GPS-paikannuksen virheet PAIKKATIETO KÄYTÄNNÖN KARTOITUS Reittien kartoittaminen Kartan luominen Kartoituksen tarkkuus JOHTOPÄÄTÖKSET POHDINTA LÄHTEET LIITE... 39
5 5 ALKUSANAT Haluan kiittää Roll Outdoorsin Heikki Stöckelliä ja Johannes Perkkiötä kiinnostuksesta tämän projektin aloittamiseen. Kiitos myös avusta ja ajoseurasta reittejä kartoittaessa. Ilman teidän reittituntemusta poluista olisi jäänyt ehkä parhaat löytymättä. Kiitos myös Joel Kauppinen korvaamattomasta avusta, neuvoista ja kommenteista koskien QGIS:n käyttöä sekä yleisesti karttojen tekemistä. Kiitos Sami Porsanger ja muut opettajat kommenteista ja neuvoista koskien opinnäytetyön aihetta ja sisältöä.
6 6 1 JOHDANTO Rovaniemellä harrastetaan paljon erilaista ulkoilua aina päiväkävelyistä ja koiran ulkoiluttamisesta polkujuoksuun ja maastopyöräilyyn. Suuri osa ulkoilusta tapahtuu metsissä ja vaaroilla, jolloin maastoon syntyy polkuja. Näitä polkuja risteileekin esimerkiksi Ounasvaaran alueella lähes loputtoman paljon ja isoa osaa niistä ei löydy kartoilta. Harrastajan voikin olla hankala löytää näistä poluista parhaat omaan käyttöönsä. Tätä taustaa vasten lähdimme yhdessä ohjelmapalveluita tarjoavan Roll Outdoors -yrityksen kanssa kehittämään opaskarttaa Ounasvaaran maastopyöräilypoluista. Tarkoituksena oli kartoittaa muutamia eritasoisia reittejä Ounasvaaran alueelta ja esittää ne kartalla, jota voi hyödyntää niin paikalliset pyöräilijät kuin Roll Outdoorsin pyöriä vuokraavat asiakkaat. Alueelta ei ollut tarkoitus kartoittaa kaikkia polkuja vaan muutama yhtenäinen lenkki, jotka sisältävät parhaita tarjolla olevia reittejä. Karttojen tekeminen on ollut jo vuosisatoja yksi maanmittareiden tärkeimmistä taidoista. Nykyaikana kartan tekemistä ei tarvitse aloittaa kuitenkaan täysin tyhjästä, vaan tehtävää helpottaa vuonna 2012 vapaaseen käyttöön avattu Maanmittauslaitoksen Maastotietokanta. Maastotietokanta sisältää kaiken karttapohjaan tarvittavan tiedon ja sitä pystyy itse visualisoimaan ja valikoimaan omaan käyttöön sopivaksi. Tätä karttaa luodessa haluttiin tarjota käyttäjälle tarkkaa tietoa maastosta, jossa polut kulkevat, joten kartta sisältää esimerkiksi kaikki kartoitetut polut, kivikot, avokalliot ja korkeuksien hahmottamista helpottavan vinovalovarjostuksen. Tässä opinnäytetyössä on opaskartan luomisen lisäksi tarkoitus tutkia absoluuttisen paikannuksen tarkkuuden riittävyyttä tällaisen paikkatiedon keruuseen käyttäen mobiili-gps -laitteita, kuten urheilukelloa ja matkapuhelinta. Tiedossa on, että laiteilla ei päästä läheskään maanmittaustasoiseen muutamien senttien tai millien tarkkuuteen vaan tarkkuus on metrien, jopa kymmenien metrien luokassa. Työssä pohditaan sitä, millaisia ongelmia tämä epätarkkuus saattaa tuoda ja toisaalta sitä, kuinka tarkemmat mittaustavat nostaisivat kuluja ja kartoitukseen käytettävää aikaa.
7 7 2 GPS-PAIKANNUS 2.1 GPS-paikannuksen toimintaperiaate Kirjainyhdistelmä GPS tulee sanoista Global Positioning System. Nimensä mukaisesti se on tarkoitettu maailmanlaajuiseksi paikannus- ja navigointijärjestelmäksi. GPS-paikannuksen historia alkaa vuodesta 1973, jolloin USA:n puolustusministeriö päätti alkaa kehittää uutta paikannusjärjestelmää sotilaalliseen käyttöön. Vuoteen 1984 asti GPS-järjestelmä olikin pelkästään USA:n armeijan käytössä, kunnes se avattiin yleiseen käyttöön. Kuitenkin, vuoteen 2000 asti oli käytössä SA-häirintä (selective availability), joka heikensi paikannuksen tarkkuutta huomattavasti. (Miettinen 2006, 9, ) Tällä hetkellä GPS-järjestelmä sisältää 32 satelliittia, jotka kiertävät maata kuudella, lähes ympyrän muotoisella, radalla (GPS Constellation Status 2017). Tämä järjestely takaa vähintään neljän satelliitin näkyvyyden käyttäjälle avoimessa ympäristössä (Federal Aviation Administration 2016a). Arkipäiväisessä puheessa GPS-kirjainyhdistelmää käytetään puhuttaessa yleisesti satelliittipaikannuksesta. Nykyään käytössä on kuitenkin USA:n järjestelmän lisäksi muun muassa venäläinen GLONASS, kiinalainen Beidou ja vielä hieman kesken oleva eurooppalainen Galileo. Nykyään monet GPS-paikantimet pystyvät käyttämään paikannuksessa GPS-satelliittien lisäksi GLONASS-satelliitteja. Tämä mahdollistaa tarkemman ja luotettavamman paikannuksen, sillä paikantamiseen käytettäviä satelliitteja on enemmän saatavilla. (Laurila 2012, ) Paikannukseen on käytettävissä muutamia eri havaintosuureita. Riippuen käytetystä menetelmästä, paikannuksessa hyödynnetään joko paikannuskoodeja tai kantoaaltoja. Käytettävissä olevat suureet ja niiden pituuden ovat: P-koodi (29,3 m) C/A-koodi (293 m) L1-kantoaalto (0,19 m) L2-kantoaalto (0,24 m). (Laurila 2012, 292.)

8 8 Satelliittipaikannus perustuu paikantimen ja satelliittien välisen etäisyyden mittaamiseen. Ensimmäisessä vaiheessa paikannin mittaa etäisyyden yhteen satelliittiin, jolloin saadaan määriteltyä pallopinta satelliitin ympärille. Tämän pallon säde on saman suuruinen kuin paikantimen mittaama etäisyys ja paikannin sijaitsee jossain tällä pallopinnalla. Ensimmäinen vaihde on esitetty kuviossa 1. (Trimble 2017.) Kuvio 1. Ensimmäinen vaihe (Trimble 2017) Seuraava mittaus määrittää toisen samanlaisen pallon, joka leikkaa osittain ensimmäisen pallon kanssa. Paikannin sijaitsee jossain näiden kahden leikkaavan pallon muodostaman ympyrän alueella. Toinen vaihe on esitetty kuviossa 2. (Trimble 2017.) Kuvio 2. Toinen vaihe (Trimble 2017) Kolmas mittaus määrittää vielä kolmannen pallon, joka leikkaa kaksi ensimmäistä palloa, antaen kaksi leikkauspistettä, joista toisessa paikannin sijaitsee. Kolmas vaihe on esitetty kuviossa 3. (Trimble 2017.)
 Jo näiden kolmen mittauksen perusteella pystytään päätellä paikantimen sijainti, sillä yleensä toinen näistä mahdollisista pisteistä sijaitsee kaukana maapallon pinnasta,")
9 9 Kuvio 3. Kolmas vaihe (Trimble 2017) Jo näiden kolmen mittauksen perusteella pystytään päätellä paikantimen sijainti, sillä yleensä toinen näistä mahdollisista pisteistä sijaitsee kaukana maapallon pinnasta, jolloin se voidaan hylätä. Neljäs mittaus on kuitenkin tarpeen paikan varmistamiseksi ja mittauksen tarkentamiseksi. (Trimble 2017.) Etäisyys satelliitteihin saadaan laskettua signaalin nopeuden ja sen kulkuun käyttämän ajan tulona. Radioaallot kulkevat tyhjiössä valonnopeutta, joten tätä käytetään kaavassa nopeutena. Aika saadaan asettamalla sekä satelliitin, että paikantimen samalla ajanhetkellä tuottama PRN-koodi (Pseudo Random Noise code) päällekkäin ja vertaamalla niiden viivettä. Viiveen selvittämiseksi on tarvitsee tietää tarkasti se ajanhetki, jolloin PRN-koodi lähetettiin satelliitista sekä aika, jolloin vastaanotin loi vastaavan koodin. Mahdollisimman tarkan ajan määrittelemiseksi satelliiteissa on käytössä atomikellot, jonka lisäksi niiden käyntiä seurataan jatkuvasti tarkkailu-asemilla ja mahdolliset viiveet välitetään korjaustietoina navigointisignaalien mukana. Tarkan ajanhetken määrityksen tärkeyttä kuvaa se, että yhden sekunnin sadasosan virhe kulkuajan laskemisessa aiheuttaa sijainninmääritykseen jopa 2800 km virheen. (Miettinen 2006, ) 2.2 GPS-järjestelmän osat GPS-järjestelmän voidaan ajatella koostuvan kolmesta osasta. Nämä osat ovat avaruusosio, valvontaosio ja käyttäjäosio. (Federal Aviation Administration 2016b.) Avaruusosioon kuuluu jo edellä mainitut satelliitit. Niitä on toiminnassa jatkuvasti vähintään 24, yleensä kuitenkin enemmän. Näistä 21 ovat varsinaisia satelliitteja ja 3 varasatelliittia. Satelliittien kiertoradat ovat noin km korkeudella

10 10 maapallon pinnasta. (Laurila 2010, ) Satelliitit saavat virtansa aurinkokennoista, jotka ne pitävät jatkuvasti suunnattuna kohti aurinkoa. Kiertoradat ovat kallistettu 55 astetta päiväntasaajaan nähden, jotta varmistetaan verkon kattavuus myös napaseuduilla. Kukin satelliitti kiertää maapallon ympäri kahdesti päivässä. (Federal Aviation Administration 2016c.) Valvontaosio koostuu USA:n Colorado Springsissä sijaitsevasta päävalvontaasemasta ja ympäri maapalloa päiväntasaajan läheisyydessä sijaitsevista seuranta-asemista ja antenneista. Kuviossa 4 on esitetty asemien ja antennien sijainnit. Päävalvonta-asema vastaa keskitetysti koko järjestelmän tarkkailusta ja toimivuudesta. Seuranta-asemat vastaavat tiedon keräämisestä satelliiteista ja ovat jatkuvassa yhteydessä päävalvonta-asemaan. Seuranta-asemat mittaavat jatkuvasti etäisyyttä satelliitteihin ja vertaavat atomikellojen aikaa. Tiedot välitetään päävalvonta-asemalle, jossa saatuja tietoja verrataan laskettuihin tietoihin, tehdään vaadittavat korjaukset ja välitetään valvonta-asemien ja antennien kautta takaisin satelliiteille ja ympäri maailmaa käyttäjien GPSpaikantimille. (Miettinen 2006, ) Kuvio 4. Valvontaosion tarkkailuasemien sijainnit (Laurila 2010, 292) Käyttäjäosio koostuu kaikista ympäri maailmaa sijaitsevista GPSvastaanottimista ja niiden käyttäjistä. Alun perin sotilaskäyttöön kehitetyllä järjestelmällä on nykyään myös valtavasti siviilikäyttöä aina maanmittauksesta ja maanviljelystä matkapuhelimien navigointisovelluksiin. Käyttö on kasvanut val-
11 11 tavasti viime vuosien aikana ja tulee jatkamaan kasvua tulevaisuudessa. (Federal Aviation Administration 2016d.) 2.3 Paikannusmenetelmät Satelliittipaikannuksessa on käytössä useita erilaisia mittausmenetelmiä. Mittaustavan valinta riippuu käyttäjän tarvitsemasta mittaustarkkuudesta, käytettävissä olevasta ajasta sekä tietenkin saatavilla olevasta mittauskalustosta. Seuraavassa esitellään hieman yleisimpiä mittaustapoja ja myöhemmin syvennytään hieman enemmän tässä työssä käytettyyn menetelmään ja verrataan niitä tarkempiin mittaustapoihin. Kaikista yleisin satelliittimittauksen muoto on absoluuttinen paikannus. Absoluuttisen paikannuksen käyttö on nykyään lähes jokapäiväistä monille ihmisille, sillä älypuhelimissa käytössä olevat GPS-paikantimet perustuvat absoluuttisen paikannuksen käyttöön. Myös kuluttajille tarjolla olevat maasto-gps:t, urheilukellot sekä auto- ja venenavigaattorit perustuvat tähän menetelmään. Menetelmässä etäisyyden mittaus pohjautuu C/A-koodihavainnon mittaamiseen signaalin viivästystekniikkaa käyttäen ja koska paikantimessa itsessään ei ole atomikelloa, korjataan kellovirhe havainnoilla ylimääräisiin satelliitteihin. Absoluuttisen paikannuksen paikannustarkkuus on noin 10 m, joskin tästä tarkkuudesta löytyy hyvin eriäviä lukuarvoja lähteestä riippuen. (Laurila 2012, ) Esimerkiksi kirjassa GNSS Global Navigation Satellite System kerrotaan C/A-koodia käyttävän paikannuksen tarkkuuden olevan todennäköisyystasolla 95 % 13m vaakasuunnassa. Kirjassa todetaan myös, että tarkkuus tulee paranemaan jopa viiteen metriin, kun GPS-satelliitteja päivitetään ja käyttöön tulee C/A-koodi myös kantoaallolle L2. (Hoffmann-Wellenhof, Lichtenegger & Wasle 2008.) Matkapuhelimien paikannuksen tarkkuutta on myös tutkittu vuonna 2014 Institution of Navigationin järjestämällä MOOC (Massive Open Online Course) onlinekurssilla. Kurssille osallistui tuhansia käyttäjiä sadoista maasta. Matkapuhelinten paikannuksen tarkkuutta tutkittiin niin avoimessa kuin urbaanissa ympäristössä. Käyttäjien tallentamien tietojen perusteella tutkijat laskivat matkapuhelimen keskimääräiseksi paikannustarkkuudeksi avoimella sijainnilla 4,9 m. (van Diggelen & Enge 2015.)
12 12 Älypuhelimet ja muut mobiililaitteet käyttävät absoluuttisen paikannuksen lisäksi nykyään A-GPS-paikannusta, eli avustettua GPS-paikannusta (assisted GPS). Avustetussa paikannuksessa sijainnin paikannus ei perustu pelkästään laitteen omaan GPS-paikantimeen, vaan siinä käytetään apuna matkapuhelinverkon kautta saatavia tietoja käytettävistä satelliiteista. Monesti matkapuhelinverkkomastoissa on GPS-vastaanotin tai niiden lähettyvillä on tukiasema. Nämä vastaanottimet vastaanottavat jatkuvasti signaalia satelliiteilta ja välittävät datan A- GPS:ää käyttävälle laitteelle. Erityisesti A-GPS:ää varten käytössä olevalla serverillä selvitetään valmiiksi, mitkä satelliitit ovat paikantimelle otollisimmat ja tehdään valmiiksi tarvittavat laskutoimet. Nämä tiedot nopeuttavat ensimmäistä paikanmääritystä. Tästä ajasta, joka kuluu ensimmäiseen paikannukseen, käytetään termiä TTFF, Time to First Fix. Laskutoimituksiin käytettävät laitteistot ovat huomattavasti tehokkaampia kuin matkapuhelimet ja koska laskentaa ei tarvitse tehdä matkapuhelimessa, paikannuksen käyttämä prosessointiteho on vähäisempi ja matkapuhelimen virrankulutus pienempi. Paikannus on myös jossain määrin mahdollista sisätiloissa ja sen tarkkuus on parempi tiheässä metsässä tai rakennusten varjostamissa paikoissa, kuin pelkkää GPS:ää käytettäessä. (Rubino 2009.) Differentiaalisessa paikannuksessa (DGPS) vaaditaan peruspaikantimen lisäksi toinen paikannin, joka pystytetään tunnetulle pisteelle. Tämän tukiaseman mittaamien tietojen avulla saadaan korjattua varsinaisen paikantimen havaitsemia tietoja ja poistettua tiettyjä mittauksen systemaattisia virheitä. Tukiasema mittaa etäisyyttä satelliitteihin ja samalla laskee tunnetun pisteen koordinaattien ja satelliitin koordinaattien välisen etäisyyden. Mitatun ja lasketun etäisyyden erotuksena saadaan laskettua virhe, joka vähennetään mitatusta etäisyydestä ja näin saadaan selville korjattu etäisyys. Näin paikannustarkkuus saadaan noin 2 m tasolle. Myös tässä menetelmässä etäisyydet satelliitteihin mitataan C/A-koodin avulla. Suomessa DGPS-menetelmää käytettäessä ei varsinaisesti tarvita toista paikanninta, sillä monet eri yritykset tarjoavat DGPS-korjauspalvelua. Tällöin tukiasematiedot välitetään käyttäjän paikantimelle eri tietoliikenneyhteyksien välityksellä. Paikantaja tarvitsee vain DGPS-yhteensopivan paikantimen ja palveluntarjoajalta ostetun korjauspalvelun. Differentiaalista paikannusta käytetään esimerkiksi ammattimaisessa auto- ja laivaliikenteessä, kun tarvitaan tarkem-
13 13 paa tietoa sijainnista, matkasta ja nopeudesta kuin absoluuttisella paikannuksella voidaan saavuttaa. Mittaustapaa käytetään yleisesti myös paikkatietojen keruussa. (Laurila 2012, ) Suhteellinen mittaus on mittaustekniikoista kaikista tarkin, mutta myös haastavin. Mittauksissa voidaan päästä jopa millimetritarkkuuksiin suhteessa tukiasemaan. Tällä tarkkuudella ei ole kuitenkaan käytännön merkitystä, sillä satelliittien radat tunnetaan selvästi tätä huonommalla tarkkuudella ja esimerkiksi ilmakehän aiheuttamat virheet täytyy ottaa myös huomioon. Suhteellisessa mittauksessa todellinen tarkkuus on muutamien senttien luokkaa, XY-tasossa hieman tarkempi kuin Z-suuntaan. Suhteellisessa mittauksessa havaintosuureena ei ole C/A-koodi, kuten edellä mainituissa, vaan kantoaalto. Kuten DGPS:ssä, myös suhteellisessa mittauksessa tarvitaan toinen paikannin, tukiasema, jonka suhteen paikantavan vastaanottimen sijainti määritetään. Suhteellisessa paikannuksessa lasketaan kahden ajankodan, vastaanottimen tai satelliittien havainnoista erotushavainto. Kun erotushavainnot mitataan samanaikaisesti neljään satelliittiin, niistä pystytään laskemaan paikantavan vastaanottimen paikkavektori. Kun tukiasema sijaitsee tunnetulla pisteellä, saadaan paikantavan mittalaitteen sijainti selville lisäämällä laskettu paikkavektori näihin tunnettuihin koordinaatteihin. Suhteellista paikannusta käytetään parasta mahdollista tarkkuutta vaativissa tehtävissä geodesian, mittaus- ja kartoitustekniikan sekä esimerkiksi koneohjauksen sovellutuksissa. Parhaimmillaan paikannustarkkuus vastaa takymetritarkkuutta. (Laurila 2012, ) Suhteellinen mittaus jakautuu vielä useisiin erilaisiin, hieman toisistaan poikkeaviin mittaustekniikoihin. Näitä eri menetelmiä on myös nimetty hieman erilailla laitevalmistajasta riippuen. Suhteelliseen mittaukseen liittyviä lisämääreitä ovat esimerkiksi RTK (Real Time Kinematic) sekä VRS (Virtual Reference Station System). RTK-mittaus perustuu tunnetulla pisteellä sijaitsevan vertailuvastaanottimen liikkuvalle, paikantavalle, vastaanottimelle lähettämiin vaihehavaintoihin. Paikantava vastaanotin käyttää näitä havaintoja avukseen saaden määriteltyä oman sijaintinsa tukiaseman suhteen. VRS-mittaus taas perustuu yksittäisen tukiaseman sijaan laajempaan tukiasemaverkkoon. Näitä tukiasemaverkkoja on Suomessakin useita, esimerkiksi Geotrimin ylläpitämä Trimnet. (Laurila 2012, 315.)
14 14 Näiden kolmen perusmittausmenetelmän ominaisuuksia ja paikannuksen tarkkuutta on esitelty taulukossa 1. Taulukossa olevat virheet on esitetty tasolla 1σ, jolloin 68 % mittausajasta virheet ovat pienempiä kuin taulukossa esitetty arvo. Taulukko 1. Perusmittaustapojen suuntaa-antavaa vertailua (mukaillen Laurila 2012, 295) Mittaustapa Paikan laskenta Virheiden hallinta Havaintosuure Tarkkuus Absoluuttinen paikannus C/A-koodi Satelliittien suhteen Mallintaminen ja toisto 5 10 m Differentiaalinen paikannus C/A-koodi Satelliittien suhteen Tukiasemakorjaus, mallintaminen ja toisto 0,5 5 m Suhteellinen mittaus L1, L2 ja L5 kantoaallot Vertailuvastaanottimen suhteen Erotushavainnot, mallintaminen ja toisto < 0,05 m 2.4 GPS-paikannuksen virheet Mittalaitteiden virheellisen toiminnan ja niitä käyttävän ihmisen tekemien virheiden lisäksi satelliittipaikannuksessa on erilaisia virhelähteitä, jotka vaikuttavat paikannuksen tarkkuuteen. Satelliittipaikannuksessa kaikkia virheitä ei pystytä poistamaan, mutta mittauksissa pyritään määrittämään systemaattiset virheet ja korjaamaan ne havainnoista. Karkeat mittausvirheet myös poistetaan virhehavaintoina ja näin mittaukseen jää jäljelle vain satunnaisia virheitä. Riippuen käytetystä mittaustekniikasta, virheiden suuruus vaihtelee huomattavasti. Esimerkiksi absoluuttisessa paikannuksessa systemaattisia virheitä ei pystytä poistamaan, vaan niistä aiheutuvat virheet jäävät paikannukseen ja huonontavat paikannuksen tarkkuutta. Differentiaalisessa mittauksessa systemaattiset virheet pystytään poistamaan ja näin havaintojen virhe pienenee jopa neljäsosaan absoluuttiseen paikannukseen verrattaessa. Taulukossa 2 esitetään absoluuttisen ja differentiaalisen paikannuksen virheitä. Virheet esitetään tasolla 1σ, joka tar-
15 15 koittaa, että todennäköisyystasolla 68 % mittausajasta virheet ovat pienempiä tai yhtä suuria kuin taulukon arvot. Taulukon arvot ovat siis keskimääräisiä virheitä, eikä niitä voi soveltaa yksittäisiin mittauksiin. Taulukossa esitetyt lukuarvot kuvaavat etäisyydenmittauksen virheitä. (Laurila 2012, ) Taulukko 2. Absoluuttisen ja differentiaalisen paikannuksen virhebudjetit (mukaillen Laurila 2012, 311) Absoluuttinen Virhelähde paikannus DGNSS Systemaattinen/m Satunnainen/m Yhteensä Ratatiedot Satelliitin kello Ionosfääri Troposfääri Monitieheijastus Vastaanotin Yhteensä
16 16 Paikannusjärjestelmä ja maapallo ovat jatkuvassa liikkeessä, joten virheiden minimoimiseksi tarvitaan mahdollisimman tarkkoja aikahavaintoja. Tämän vuoksi satelliiteissa ja valvonta-asemilla on käytössä äärimmäisen tarkat atomikellot. Näiden atomikellojen avulla havainnot pystytään ajoittamaan juuri samaan ajan hetkeen. Satelliitit lähettävät signaalien mukana myös jatkuvasti atomikelloista saatavaa kellonaikaa. Satelliitit kulkevat tunnetuilla radoilla, mutta niiden eksakti sijainti ei ole tiedossa. Ratatietojen virheellisyys saatata aiheuttaa metrien virheen paikannukseen. Äärimäistä tarkkuutta vaativissa sovellutuksissa paikannus saadaan tarkennettua vasta muutaman päivän päästä, kun satelliittien aidot ratatiedot tulevat saataville. Tavanomaisessa paikannuksessa näitä tarkennettuja ratatietoja ei ole tarvetta käyttää. (Laurila 2012, ) Ilmakehän eri kerrokset, erityisesti ionosfääri ja troposfääri vaikuttavat signaalien etenemiseen satelliiteista paikantimeen. Ionosfääriin vaikuttaa erityisesti revontulina maapallolle näkyvä auringon aktiivinen hiukkassäteily. Todella aktiivisen ionosfäärin aikana paikantaminen voi estyä kokonaan, koska signaalin kulkumatka ionosfäärin läpi vaihtelee niin paljon. Erityisesti vuoristoisella seudulla troposfäärin eli ilmakehän alimman kerroksen vaihteleva vesihöyrypitoisuus aiheuttaa virhettä varsinkin paikannuksen korkeustietoon. Ilmakehän kerroksien vaikutus signaaliin riippuu signaalin aallonpituudesta. Niinpä siitä aiheutuvia virheitä pystytään vähentämään, kun verrataan eri aallonpituuksilla saatavia havaintosuureita toisiinsa. Absoluuttisessa paikannuksessa tämä virhelähde on hankala, koska havaintoja saadaan tällä hetkellä vain yhdeltä aallonpituudelta. USA:n hallinnon virallisilla GPS-informaatio sivuilla mainitaan, että GPSjärjestelemään ollaan lisäämässä C/A-koodi myös kantoaallolle L2. Sen avulla pystytään poistamaan ionosfäärin vaikutus mittauksen virheeseen ja se tulee tarkentamaan absoluuttista paikannusta huomattavasti. Tällä hetkellä signaalin status on pre-operational ja sitä lähetetään 19 satelliitista. Suunnitelmien mukaan se tulee olemaan täysin käytössä kaikissa 24 satelliitissa vuoteen 2021 mennessä. (Laurila 2012, ; GPS.gov 2017.) Jotta satelliittipaikannus toimisi luotettavasti ja riittävällä tarkkuudella, tarvitaan hyvä näkyvyys madollisimman moneen satelliittiin. Riippuen havainnoitsijan sijainnista maapallolla ja satelliittien sen hetkisestä radoista, vaihtelee käytettävissä olevien satelliittien määrä todella paljon. Pääsääntöisesti voidaan ajatella,
17 17 että jos toimitaan esteettömässä ympäristössä, satelliittien määrä ei ole ongelma. Kaupungissa rakennukset ja metsässä tiheä puusto ja muut maastokohteet saattavat kuitenkin rajoittaa näkyvyyttä niin, että mittaus hankaloituu tai jopa estyy. Käytettävien satelliittien tulisi myös olla riittävän paljon havaitsijan horisontin yläpuolella, vähintään astetta. Muuten satelliittien lähettämä signaali tulee liian loivassa kulmassa ilmakehään ja kulkee siellä liian pitkän matkan, jolloin ilmakehän kerroksien aiheuttamat virheet kasvavat suuriksi. Paras tilanne on, jos yksi havaittavista satelliiteista on havaitsijan zeniitissä eli pystysuoraan yläpuolella ja muut satelliitit mahdollisimman hyvin hajautuneena ympäri taivasta. Satelliittigeometrian vaikutusta mittaustarkkuuteen kuvataan DOPluvuilla (Dilution of Precision). DOP-lukuihin vaikuttaa satelliittien sijainti havaitsijaan nähden. Yleisesti ottaen voidaan sanoa, että mitä pienempi DOP-luku, sitä parempi satelliittigeometria sillä hetkellä on. Satelliittigeometriaa pystytään tarkkailemaan erilaisilla laskentaohjelmilla jo etukäteen. Hankalaan paikkaan mittausta tekemään mentäessä voi olla hyvä syöttää paikan tiedot ja suunniteltu mittausaika ja -päivä ohjelmaan, joka pystyy kertomaan juuri silloin saatavilla olevan satelliittigeometrian. Näiden ennusteiden avulla pystytään valitsemaan otollisin mittaushetki. (Laurila 2012, )
18 18 3 PAIKKATIETO Paikkatieto sisältää nimensä mukaisesti tietoa kohteen sijainnista ja ominaisuuksista. Kullakin pakkatietokohteella siis on sijainti, joka yleensä määritellään osoitteen tai koordinaattien avulla, sekä erilaisia kohteesta kertovia ominaisuustietoja. Karttatiedot ovat perinteistä paikkatietoa, mutta paikkatiedon avulla esitettävissä olevia asioita on lähes loputtomasti. Esimerkkeinä paikkatiedosta voisi mainita maastotiedot, ympäristön tilan ja maankäytön tiedot tai vaikka sähköja tietoliikenneverkkoa koskevat tiedot. (Eskola & Peltoniemi 2011, 34.) Tiedon ei välttämättä tarvitse olla staattista. Esimerkiksi HSL:n, Helsingin seudun liikenteen, tarjoamat raitiovaunujen reaaliaikaiset sijaintitiedot ovat paikkatietoa (Karttakeskus 2015, 5). Pelkillä yksittäisillä paikkatiedoilla ei pääse kovin pitkälle. Erilaisten paikkatietojen käsittelyyn, tallentamiseen, järjestelyyn ja analysointiin käytetään paikkatietojärjestelmää. Paikkatietojärjestelmästä käytetään yleisesti lyhennystä GIS, joka tulee sanoista Geographig Information System. Paikkatietojärjestelmän avulla voidaan siis yhdistää erilaisia paikkatietoaineistoja haluttuun muotoon sekä tehdä ohjelmien avulla erilaisia analyysejä paikkatietoon liittyen. (Eskola & Peltoniemi 2011, 34.) Tässä opinnäytetyössä ei tarkemmin syvennytä paikkatietojärjestelmien loputtomiin mahdollisuuksiin, sillä työssä käytetty paikkatieto koostuu lähinnä yksinkertaisista karttatiedoista ja niiden visualisoinnista. Tässä työssä tehtävään karttaan käytetään Maanmittauslaitoksen tarjoamaa Maastotietokantaa. Se on Suomen ainoa, koko maan kattava, paikkatietoaineisto. Aineistoa päivitetään jatkuvasti yhteistyössä kuntien ja energiayhtiöiden kanssa esimerkiksi maastomittauksilla sekä ilmakuvilla ja laserkeilauksilla. MML:n maastotietokanta kuuluu INSPIRE-direktiivin piiriin. INSPIRE on Euroopan komission direktiivi, jolla pyritään tarjoamaan avointa, yhteiskäyttöistä, paikkatietoa. Direktiivin avulla pyritään saamaan eri maiden ja toimijoiden paikkatiedot keskenään yhteensopiviksi ja vähentämään turhaa päällekkäisyyttä. Maastotietokanta on lisensoitu Creative Commons Nimeä 4.0-lisenssillä. Se mahdollistaa aineiston vapaan käytön, myös kaupallisissa sovellutuksissa, kunhan aineiston ja sen tuottajan nimi mainitaan. (Maanmittauslaitos 2017.)
19 19 4 KÄYTÄNNÖN KARTOITUS 4.1 Reittien kartoittaminen Tämän opinnäytetyön tarkoituksena oli luoda opaskartta Rovaniemen maastopyöräreiteille sekä tutkia absoluuttisen paikannuksen kuluttajille tarkoitettujen sovellutusten tarkkuuden riittämistä tällaiseen kartoitukseen. Aikataulujen ja luonnonolosuhteiden vuoksi opaskartta kapenikin koskemaan ainoastaan Ounasvaaraa, joka on Rovaniemen maastopyöräilyn tärkein keskittymä. Ounasvaaran maasto ja mittausolosuhteet edustavat hyvin koko Rovaniemen alueen olosuhteita, joten paikannuksen tarkkuus ja käytännön mittaus eivät muuttuisi mihinkään, vaikka liikuttaisiinkin eri alueilla. Niinpä tämän työn tarkasteluihin kartoitettavan alueen supistuminen ei vaikuttanut mitenkään. Maastosta ei ollut tarkoitus paikantaa kaikkia olemassa olevia polkuja, joita Ounasvaaralla on lähes loputtomiin, vaan muutamia yhtenäisiä reittejä, jotka kulkevat parhaiksi todettuja polkuja seuraillen. Reittien kartoittamiseen käytettiin absoluuttista paikannusta, jotta voidaan tarkastella riittääkö sen tarkkuus tällaiseen kartoitukseen. Laitteina käytettiin Huawei Honor 7 Lite -älypuhelinta ja sen SportsTracker -sovellusta sekä Suunto Ambit2 -rannekelloa. Kartoitus tehtiin kahdella laitteella yhtä aikaa, jotta sen tarkkuutta ja virheitä pystytään paremmin vertailemaan. Molemmat laitteet ovat täysin harrastajille suunnattuja laitteita, joilla ei ole mitään tekemistä maanmittaustekniikan kanssa. Absoluuttista paikannusta hyödyntäviä GPS-paikantimia löytyy myös maanmittaustekniikan alalta, ja niiden tarkkuuden luvataan olevan parempi kuin kuluttajille suunnatuissa laitteissa. Esimerkiksi Trimble TDC100 -älypuhelimelle luvataan paikannustarkkuudeksi <2-5 m ja siinä on mahdollisuus yhdistää laite VRS-tekniikkaa käyttävään vastaanottimeen, jolloin tarkkuus paranee muutaman kymmenen senttimetrin luokkaan. Laitteen hinta on kuitenkin noin 5 kertaa normaalia älypuhelinta kalliimpi, eikä sen luvattu tarkkuus ilman lisävastaanotinta ja tuhansia euroja maksavaa VRS-palvelua ole vielä kovinkaan tarkka. Niinpä tässä työssä haluttiin keskittyä täysin kuluttajille suunnattujen laitteiden käyttöön. Reittien tallentaminen suoritettiin yksinkertaisesti laittamalla laitteet paikantamaan ja ajamalla reitit ympäri. Näin saatiin samalla tietoa reittien vaikeustasosta
20 20 ja polkujen kunnosta. SportsTracker ohjelmisto ja Suunnon kello tallentavat laitteen sijainta automaattisesti ja luovat näiden yksittäisten paikannusten välille viivat, joista saadaan lopputulokseksi yksi yhtenäinen jälki, joka kuvaa paikantimen kulkemaa reittiä. Suunnon asetuksista pystyy vaikuttamaan paikannuksen tarkkuuteen ja näitä kartoituksia tehdessä tarkkuus valittiin parhaimmaksi ja laite asetettiin tallentamaan sijaintinsa joka sekunti. SportsTrackerissa paikannuksen tiheyteen ei pysty vaikuttamaan, mutta aineistojen perusteella tiheys vaikuttaisi olevan samaa luokkaa. Puhelimen paikannustarkkuuteen pystyy vaikuttamaan valitsemalla asetuksista sijaintitilaksi suuri tarkkuus. Nimi saattaa vaihdella eri puhelimien välillä, mutta käytännössä tämä antaa luvan laitteelle käyttää paikannukseen satelliittien lisäksi mobiili- ja wifi-verkkoja eli tällöin käytössä on A-GPS. Laitteiden tallentamat tiedot löytyvät paikannuksen päättymisen jälkeen valmistajien tarjoamista verkkopalveluista, joissa paikannuksen tietoja pystytään tarkastelemaan. Tarjolla on kartalla esitettävän reitin lisäksi paljon erilaisia tietoja harjoituksen kestosta, nopeuksista, korkeuksista ja käytetyistä sykkeistä. Reittejä kartoitettaessa kiinnostuksen kohteena on kuitenkin vain paikantimen paikantama reittijälki. Jälki pystytään lataamaan palvelusta yleiseen.gpx-tiedostomuotoon, jolloin sen tarkastelua ja käsittelyä voidaan jatkaa toisissa ohjelmissa. 4.2 Kartan luominen Tässä työssä tehdyn kartan luomiseen käytettiin Maanmittauslaitoksen maastotietokantaa. Aineiston käsittelyyn käytettiin avoimen lähdetiedon paikkatietoohjelmistoa nimeltä QGIS. Ohjelma on ladattavissa ilmaiseksi omaan käyttöön, joka helpottaa työtä, kun kaikkea ei tarvitse tehdä koulun koneilla vaan työtä pystyy jatkamaan kotona.

21 21 Maastotietokanta sisältää todella paljon erilaisia kohdetietoja. Kun Maastotietokanta ensimmäisen kerran ladataan QGIS-ohjelmaan ei se ole kovinkaan havainnollistava. Kaikki eri kerrokset ovat satunnaisessa järjestyksessä ja kohteita kuvaavat värit ovat ohjelman satunnaisesti päättämiä. Aineiston ulkonäköä ja sisältöä sen alkuperäisessä muodossa on esitelty kuviossa 5. Kuvio 5. Maastotietokanta alkuperäisessä ulkonäössä Aineistosta täytyy valita kyseiseen työhön tarvittavat kohteet ja visualisoida ne näyttämään loogisilta. Maastotietokanta on jaettu 15 kohderyhmään, joita on muun muassa tiestö, maasto, rakennukset, korkeussuhteet ja suojelukohteet. Eri kohderyhmät jakautuvat vielä useampiin eri kohteisiin. Esimerkiksi tiestö jakautuu kohteisiin tieviiva, tiesymboli ja tieteksti. Maasto -kohderyhmä taas jakautuu lukuisiin, koko maanpinnan ja vesialueet kattaviin maastokuvioihin. Kohderyhmät täytyy siis vielä ryhmitellä kohteisiin, jotta esimerkiksi polut voidaan kuvata katkoviivalla ja tiet jatkuvalla viivalla tai avokallio pystytään visualisoimaan erottumaan suosta. Kuviossa 6 on esitetty kohderyhmä m_t4324r_p ryhmiteltynä luokkien mukaan. Se on siis karttaruudun T4323R, kohderyhmään Maasto/1 (m) kuuluvia alueita (p) sisältävä ryhmä (Maastotietokohteiden luokitus 2016).

22 22 Kuvio 6. Luokiteltu ja visualisoitu kohderyhmä Kuviossa 6 kohteet on jo myös visualisoitu eri väreillä ja tekstuureilla näyttämään oikealta kartalta. Kyseinen kuvio on kaappaus jo melko valmiista kartasta, joten myös muut kohderyhmät, kuten tiestö, on jo visualisoituna. Kuviossa 7 on tarkempi kaappaus kohteen 34700, Kivikko, visualisoinnista. Kohde on muokattu esittämään kivikkokohteet pieniä kolmioita sisältävänä alueena.

23 23 Kuvio 7. Kohteen 34700, Kivikko, visualisointi Tämä aineiston ryhmittely vie huomattavan paljon aikaa, mutta se tarvitsee tehdä vain yhdelle karttaruudulle. Jos alue ulottuu useamman karttaruudun alueelle, pystyy ryhmittelyn ja visualisoinnin kopioimaan aikaisemmasta ruudusta tähän uuteen. Näin useammasta ruudusta koostuva kartta myös saadaan yhtenäiseksi. QGIS:iin ladatussa Maastotietokannassa eri kohteet on esitetty helposti ymmärrettävien nimien sijaan numerokoodeilla. Niinpä ryhmittelyn apuna on pakko käyttää varta vasten Maastotietokantaa varten luotua selitettä. Selitteen avulla numerokoodeille on mahdollista löytää nimi ja ominaisuustiedot, jolloin pystyy päättämään, tarvitaanko kohdetta ja millaiseksi se visualisoidaan. Tätä työtä tehdessä käytettiin apuna Maastotietokannasta luotua Excelpohjaista selitettä (Maastotietokohteiden luokitus 2016). Maastotietokantaa selittävä ohje on julkaistu myös fyysisenä kirjana (Annunen ym. 2005). Karttojen visualisointi on aivan oma taiteen laji. Kartasta voidaan tehdä mahdollisimman yksinkertaisen esittämällä siinä esimerkiksi vain maaston värit ja polut katkoviivalla. Tai toisaalta siihen voi sisällyttää kaikki Maastotietokannan tarjoamista kohteista aina hakkuaukoista uponneisiin hylkyihin ja muinaismuistoihin saakka. Kartan käyttötarkoitus määrittää millainen visualisointi ja kohteiden valinta on kaikista tarkoituksenmukaisin. Tässä työssä tehtyyn karttaan haluttiin sisällyttää suhteellisen paljon tietoa. Sen suunniteltiin olevan lähtökohtaisesti
24 24 maastokartta, jotta reittien seuraaminen helpottuu. Niinpä kartan värit ja sisältö mukailevat pitkälti MML:n maastokarttoja. Kartalla on esitetty muun muassa eri kokoisia polkuja, avokallioita, rakkakivikkoja, rakennuksia ja sähkölinjoja. Kartalla ei haluttu esittää reitteinä kaikkia mahdollisia polkuja, mutta ne haluttiin kuitenkin jättää kartalle näkyviin, jotta kartan käyttäjä pystyy hyödyntämään omilla lenkeillään myös muita polkuja kartoitettujen reittien lisäksi. Monipuolisesti kartalla eritellyt maastokuviot ja maastokohteet auttavat oman paikan määrittämistä maastossa. Maastotietokannan kohteiden lisäksi kartan pohjalle ladattiin vinovalovarjostus. Yhdessä korkeuskäyrien kanssa vinovalovarjostus tarjoaa helposti hahmotettavan esityksen maston korkeussuhteista. Pelkät korkeuskäyrät ovat maastokarttoihin tottumattomalle käyttäjälle hankalasti hahmotettavissa, mutta vinovalovarjostus tuo karttaan kolmiulotteisen vaikutelman maaston korkeudesta. Aineiston visualisoinnin jälkeen pohjakartta oli valmis, minkä jälkeen kartalle ladattiin kartoitetut reitit. Reitit pystyy lataamaan QGIS:iin gpx-formaatissa. Kun vain huolehditaan, että kaikki aineisto on samassa koordinaatistossa, jälki latautuu automaattisesti oikeaan sijaintiinsa kartan päälle. Aineiston koordinaatistoa pystyy muuttamaan haluamakseen QGIS:ssä. Paikantimen tallentamaa jälkeä voi olla tarvetta muokata esimerkiksi virheellisten paikannuksien vuoksi tai vain esityksen yksinkertaistamiseksi. Maastossa olevien polkujen haluttiin erottuvan kartoitetun jäljen alta, joten jälki muokattiin hieman läpinäkyväksi, jolloin alla olevat kohteet erottuvat. Jäljestä myös poistettiin päällekkäisiä viivoja, jotka johtuivat reitiltä harhaantumisesta ja takaisin päin polkemisesta. Gpx-muotoista jälkeä ei pysty muokkaamaan QGIS:ssä, vaan se täytyy ensin muuttaa vektorimuotoiseksi. Tämän jälkeen jäljestä pystyy poistamaan virheellisiä pisteitä tai esimerkiksi yksinkertaistamaan sitä suoremmaksi. Samalla tavalla pystyy myös luomaan uusia viivoja, esimerkiksi poikkeamaan kartoitetulta reitiltä tuli- tai näköalapaikalle. Näitä poikkeamia on helppo luoda, vaikka niitä ei maastossa oltaisi kartoitettukaan, kun vain seurailee kartalta löytyviä polkuja ja muita teitä. Kartta haluttiin laatia mahdollisimman laadukkaaksi ja informatiiviseksi. Siksi kartan visualisoinnin lisäksi sen taittaminen oli tärkeää. Kartalle lisättiin selite kertomaan eri reiteistä ja muista kartalla esitettävistä kohteista, kuten tulipai-
25 25 koista ja hienoista näköaloista. Tässä työssä tehtyyn karttaan ei kirjoitettu tarkempia selityksiä reiteistä eikä niiden vaikeuksista, vaan todettiin vain ajon tapahtuvan jokamiehenoikeuksien perusteella ja omalla vastuulla. Tämä kartta tullee jäämään vain PDF-muotoiseksi esitykseksi, mutta myöhemmin karttaa on tarkoitus laajentaa kattamaan myös muita alueita Rovaniemeltä, jolloin siitä tullaan painattamaan myös myyntiin fyysinen kartta, johon luultavasti lisätään hieman kirjallistakin informaatiota Rovaniemen maastopyöräilystä ja reiteistä. 4.3 Kartoituksen tarkkuus Tämän opinnäytetyön yhteydessä paikkatiedon kartoitus siis suoritettiin käyttäen absoluuttista paikannusta ja A-GPS:ää. Absoluuttien paikannuksen tarkkuus vaihtelee yleisesti noin 7 20 m välillä, jopa 100 m virheitä yksittäisissä havainnossa sanotaan voivan esiintyä. Liitteenä olevissa kuvakaappauksissa voidaan vertailla Maanmittauslaitoksen Maastotietokannassa kartoitettuna olevia polkuja sekä Trimble R8:lla tehtyjä tarkastusmittauksia, tässä työssä mitattuihin reitteihin. Laitteet eivät mitanneet yhtäkään yksittäistä, selkeästi erottuvaa virhemittausta. Tällaiset virhemittaukset huomaisi helposti laitteen tuottamasta GPSjäljestä ja ne pystyisi editoida pois. Pääasiassa jäljet seurailevat hyvin Maastotietokantaan kartoitettua polkua, suurimpien yksittäisten poikkeusten ollessa noin 6m luokkaa. Kuviossa 8 esitetyssä kuvakaappauksessa nähdään paikantimen jäljen poikkeama Maastotietokannan polusta kohdassa, jossa poikkeama oli tässä työssä kerätyssä aineistossa suurimmillaan.
26 26 Kuvio 8. Paikantimen jälki poikkeaa hieman Maastotietokannan polusta Suoraan Maastotietokannan aineistoon verratessa saatetaan tehdä kuitenkin virheellisiä päätelmiä, sillä Maastotietokannan sijaintitarkkuus ei ole absoluuttisen oikea. Kuviossa 9 on laitettu päällekkäin Maastotietokannan polku, Maanmittauslaitoksen tarjoama ilmakuva, absoluuttista paikannusta käyttäen kartoitettu yhtenäinen jälki sekä Trimble R8 VRS-GPS -laitteella tehdyt tarkistusmittaukset. Trimblessä käytössä olevassa VRS-paikannuksessa virheiden pitäisi olla alle 10cm luokkaa, joten sillä tehtyjä kartoituksia voidaan pitää eksakteina. Kun verrataan Maastotietokantaan digitoitua polkua ilmakuvalla erottuvaan aukkoon ja Trimblellä suoritettuihin kartoituksiin, huomataan, että Maastotietokannan sijaintitarkkuuksissa todella on virheitä. Osittain näitä virheitä selittää se, että tätä työtä varten tehdyt kartoitukset on suoritettu lumen ollessa maassa, jolloin kulku-ura saattaa muodostua hieman eri kohtaan missä se kesällä kulkee. Älypuhelimella ja GPS-kellolla tehdyt kartoitukset on suoritettu pyöräillen, jolloin nopeudet ovat parhaimmillaan olleet 40 km/h. Tästä aiheutuu alla olevalta kuvi-

27 27 oltakin hyvin ilmenevää jäljen kulmikkuutta. Paikannus tapahtuu vain kerran sekunnissa, jolloin pyörä kerkeää liikkumaan hyvinkin pitkän matkan paikannusten välissä. Trimblellä suoritetut tarkastusmittaukset tehtiin staattisesti tai jatkuvaa mittausta käyttäen hyvin hitaalla kävelynopeudella, jolloin sen muodostama jälki seuraa sulavammin polkujen tiukkoja kaarteita. Trimblellä suoritettuja paikannuksia ja kevyemmällä menetelmällä tehtyjä kartoituksia verratessa huomataan, että absoluuttisellakin paikannuksella tehdyt jäljet kulkevat melko tarkkaan oikeassa sijainnissa. Alla olevilla kuvioilla Trimblellä tehdyt tarkistumittaukset on esitetty punaisilla pisteillä ja kevyillä laitteilla kartoitetut jäljet yhtenäisillä viivoilla. Kuvio 9. GPS paikannusten, maastotietokannan ja ilmakuvan vertailua Kuviossa 10 on esitetty samat aineistot kuin yllä olevassa kuviossa, sillä poikkeuksella, että siinä on kaksi, eri kerroilla, samaa polkua pitkin ajettua GPSkellolla kartoitettua jälkeä. Kuviosta huomataan, että toisella kerralla GPS-kellon jälki kulkee melkein täsmälleen oikeassa kohdassa. Sinisen jäljen ero Trimblellä kartoitettuihin pisteisiin on kymmenien senttien luokkaa. Toisaalta taas huoma-

28 28 taan, että toisella kerralla tallentunut jälki poikkeaa Trimblen koordinaateista noin 4 metriä. Tämäkään ei ole suuri poikkeama, mutta kertoo, että absoluuttista paikannusta käytettäessä kartoituksen laatu saattaa vaihdella melko paljon riippuen mittausolosuhteista ja saatavilla olevista satelliiteista. Osittain jäljissä oleva ero selittyy sillä, että toinen on ajettu kuivan maan aikaan ja toinen lumen ollessa maassa, jolloin kuten aiemmin todettiin, kulku-ura saattaa olla eri kohdassa. Kuvio 10. Absoluuttisen paikannuksen laatu vaihtelee Kuviossa 11 on esitetty kahden eri laitteen samanaikaisesti mittaamat jäljet päällekkäin, ja siitä huomataan, että ne eivät kulje täsmälleen samaa reittiä. Paikantimien tallentamien jälkien muoto on hyvin samankaltainen, mutta yksittäiset havainnot poikkesivat tätä työtä varten kerätyssä datassa suurimmillaan jopa 7 m toisistaan.

29 29 Kuvio 11. Paikantimien jäljet eroavat toisistaan Tätä opinnäytetyötä varten kerätystä aineistosta on vaikea sanoa, kumpi paikantimista on tarkempi, molempien tallentamat jäljet poikkeavat hieman maastotietokannan poluista, Trimble R8:lla tehdyistä tarkastusmittauksista sekä toisistaan. Kuvioissa 11 ja 12 esitellyistä jäljistä oranssi on tallennettu Suunnolla ja violetti on Honor -älypuhelimen jälki. Kuviossa 12 on esitetty suurin yksittäinen poikkeama, minkä paikantimien tallentamasta aineistosta löytyi. Poikkeama jälkien välillä on 7,2 m.

30 30 Kuvio 12. Suurin yksittäinen poikkeama kahden tallentimen jäljissä Aineistosta on huomattavissa se, että sankemmassa metsikössä kulkevat kohdat ovat hieman epätarkempia, kuin avonaisemmilla alueilla kulkevat osiot. Kuviossa 13 on kuvakaappaus jäljestä, joka kulkee Ounasvaaran laella, Juhannuskalliolla. Siellä maasto on hyvin avonaista, paikoin jopa avokalliota, jolloin GPS-signaali pääsee kulkemaan esteettömämmin suoraan vastaanottimeen. Mittaustarkkuuteen voi hyvin vaikuttaa myös se, että Suunto oli reittejä kartoitettaessa kiinnitettynä pyörän ohjaustankoon, kun taas älypuhelin oli takin taskussa. Parhaimman mittaustuloksen saavuttamiseksi laitteen tulisi pystyä vastaanottamaan GPS-signaali mahdollisimman esteettömästi.

31 31 Kuvio 13. Avonaisilla paikoilla paikannustarkkuus on parempi Vaikka laitteet käyttävät samaa paikannusmenetelmää, eroaa niiden käyttämä GPS-vastaanottimet toisistaan. Eri valmistajien GPS-sirut ovat ominaisuuksiltaan hieman eri tasoisia ja parhaan paikannustuloksen saavuttamiseksi tulisi pyrkiä valitsemaan parhaan vastaanottimen sisältävä laite. Tämän valinnan tekeminen on hyvin hankalaa suorittaa, muuten kuin käytännössä kokeilemalla. Laitteiden paikannustarkkuudesta on nimittäin hyvin vähän tietoa tarjolla ja eri valmistajien ilmoittamat tiedot eivät välttämättä ole keskenään vertailukelpoisia. Kohtuullisen uusien laitteiden ominaisuuksissa ei kuitenkaan pitäisi olla niin suuria eroja, että jollain laitteella tällainen kartoittaminen ja reittien seuraaminen ei onnistuisi.
32 32 5 JOHTOPÄÄTÖKSET Tätä opinnäytetyötä varten kerätystä aineistosta suurimmat löydetyt virheet olivat kaikki alle 10 m. Suurin havaittu, kahden samanaikaisesti paikantavan laitteen jäljen välinen, ero oli 7,2 m. Maastotietokannan aineistoon verrattaessa suurin havaittu virhe oli 6,3 m ja Trimble R8:lla tehtyihin tarkistusmittauksiin verrattaessa 4,3 m. Kerätystä aineistosta tuotetun kartan mittakaava tulee olemaan 1:15000, jolloin alle 10 m luokkaa olevilla virheillä ei ole käytännön merkitystä. Kartalla esitettävät reittiviivat täytyy esittää riittävän paksuina niiden havaitsemisen helpottumiseksi, jolloin kartalla esitettävä viiva jo itsessään on noin 15 m leveä mittakaavaan suhteutettuna. Tällöin pienet virheet havainnoissa ei haittaa lainkaan. Myös kuten aiemmin havaittiin, jo Maastotietokannassa olevien polkujen sijanneissa on pieniä virheitä, joten saman suuruiset virheet reittejä kartoitettaessa ovat hyväksyttävissä. Jos kartoitettua reittijälkeä halutaan käyttää GPSpaikantimessa ja seurata reittiä sen avulla, virheistä saattaa olla enemmän haittaa. Suurimmat hankaluudet tulee reitin tiukoissa mutkissa ja risteyksissä. Jos reittiä kartoittaessa on tapahtunut 10 m virhe kohdassa, jossa reitin pitäisi ristetä toisen polun kanssa ja jälki kääntyykin 10 m liian aikaisin tai liian myöhään, saattaa jälkeä seuraava pyöräilijä eksyä reitiltä. Maastopyöräreitit kulkevat kuitenkin selvästi maastossa erottuvilla poluilla, joten pienet sijaintivirheet jäljessä eivät luultavasti aiheuta suuria ongelmia. Jos jälki näyttää kääntyvän kohdasta, jossa polkua ei mene, niin luultavasti käyttäjä osaa jatkaa matkaansa eteenpäin seuraavaan maastossa erottuvaan risteykseen. Jos maastossa tiedetään olevan epäselviä kohtia, kuten monien polkujen risteämiä, voidaan niihin kiinnittää tarkempaa huomiota jälkiä käsitellessä, ja tarkistaa, että kartoitettu jälki kääntyy varmasti oikeassa kohdassa. Yleensä paikkatietoa kartoitettaessa käytettään tarkempia menetelmiä. Jos esimerkiksi kartoitetaan maastossa olevia polkuja, on tärkeää saada niiden sijainti täsmälliseksi. Tässä työssä ei kuitenkaan ollut tarkoitus kartoittaa sitä, missä polut kulkevat, vaan kartoittaa reitti, joka kulkee pääasiassa näitä jo kartoitettuja polkuja pitkin. Tässä työssä käytetyssä paikannusmenetelmässä havaintoja ei tarvitse pysähtyä tekemään paikalleen, vaan reitit pystyttiin kartoit-
33 33 tamaan ajamalla ne ympäri maastopyörällä pitäen matkapuhelimen ja kellon reittiohjelma päällä kartoittamassa kuljettua reittiä. Staattisia havaintoja pitäisi tehdä satoja, ellei tuhansia, että maastossa mutkitteleva reitti saataisiin tarkasti kartoitettua, joka nostaisi kartoitukseen menevää aikaa ja vaivaa huomattavasti. Monet laitteet tarjoavat kuitenkin jatkuvaa mittaustapaa, jolloin reitit voisi kartoitta kävelemällä ne läpi laitteen kanssa. Trimble R8:lla tehdyt tarkastusmittaukset tehtiin osittain jatkuvalla mittauksella. Paikannin asetettiin mittaamaan sijaintiaan sekunnin välein ja käveltiin laite suorassa pitäen kartoitettavaa polkua pitkin. Mittauksen yhteydessä laitteen ilmoittamia tarkkuuksia tarkastellessa niiden todettiin pysyvän noin cm luokassa. Tällä tekniikalla reitit saisi kohtalaisessa ajassa kartoitettua siis huomattavan paremmalla tarkkuudella. DGPS tai tarkastusmittauksia tehdessä käytettyä VRS -mittaustapaa käyttävät paikantimet eivät kuitenkaan ole kuluttajille suunnattuja. Niiden hankinta- ja käyttökustannukset ovat kymmeniä kertoja suuremmat kuin lähes kaikilta taskusta löytyvän älypuhelimen käyttö. Niinpä tällaista reittikarttaa omakustanteisesti tehdessä tarkemman laitteiston hankinta tai edes vuokraaminen ei ole taloudellisesti kannattavaa. Tarkempia mittaustekniikoita käyttävien laitteiden käyttö on myös monimutkaisempaa ja ne vaativat usein lisäantenneja, -sauvoja ja - vastaanottimia. Verrattaessa älypuhelimen paikannussovellukseen niiden käyttö on melko hankalaa, eikä niitä ole suunnattu tavalliselle kuluttajille. Myöskään absoluuttista paikannusta hyödyntävät, maanmittauskäyttöön tarkoitetut laitteistot eivät ole hankinta- ja käyttökustannusten puolesta käyttökelpoisia tällaisiin yksittäisiin projekteihin. Kuten aiemmin työssä huomattiin, liian suuri kulkunopeus aiheuttaa reittijälkiin kulmikkuutta. Paikannuksen tapahtuessa kerran sekunnissa nopeasti kulkeva pyörä kerkeää kulkemaan paikannusten välissä kohtuullisen pitkän matkan ja tiheästi mutkitteleva reitti ei välttämättä kuvaudu aivan oikein. Tästä aiheutuvat virheet ovat kuitenkin hyvin pieniä, mutta asia on hyvä ottaa huomioon reittejä kartoitettaessa ja mahdollisesti laskea ajonopeutta pienemmäksi. Signaalin esteetön kulku paikantimelle kannattaa ottaa myös huomioon ja asettaa paikannin mahdollisuuksien mukaan esteettömälle paikalle kuten pyörän ohjaustankoon eikä taskuun tai reppuun.
34 34 Edellä olevien pohdintojen ja mittausten perusteella sanoisin kevyiden paikantimien käyttämän absoluuttisen paikannuksen olevan riittävän tarkkaa tällaisen paikkatiedon kartoitukseen. Kartoitukseen käytetyn ajan sekä laitteiden hankinta- ja käyttökustannukset ja käytön helppous huomioon ottaen se on mielestäni myös järkevin mittausmenetelmä. Virheiden pysyessä reilusti alle 10 m luokassa ja ollen pääasiassa muutaman metrin suuruisia ei niistä aiheudu kartoituksessa ongelmia. Kun tulevaisuudessa absoluuttisen paikannuksen tarkkuus tulee vielä parantumaan uusien havaintosuureiden ja satelliittijärjestelmien tullessa käyttöön, kyseinen metodi on entistä hyödyllisempi niin reittien kartoitukseen kuin Google Maps -tyylisten kartta ohjelmien navigointiin.
35 35 6 POHDINTA Tässä työssä tehtyjen mittausten perusteella absoluuttinen paikannus sopii hyvin maastopyöräilyreittien kartoittamiseen. Mittausmenetelmän edut peittoavat selkeästi sen haitat ja ongelmakohdat. Tarvittaessa tietenkin on tarjolla tarkempia menetelmiä ja jokaisen projektin kohdalla täytyy miettiä mikä on siinä tarvittava tarkkuustaso ja projektin budjetti ja valittava mittausmenetelmä ja laitteisto sen mukaan. Tässä opinnäytetyössä saadut tulokset ovat lähinnä yksittäisiä mittaustuloksia, eikä niiden pohjalta voida tehdä tarkkoja päätelmiä matkapuhelinten ja GPSkellojen mittaustarkkuudesta. Mittaustulokset ovat kuitenkin hyvin samaa luokkaa kuin tarkemmissa tutkimuksissa on saatu todettua. Tulosten vertailu Maastotietokantaan, ilmakuviin sekä varsinkin Trimble R8:lla tehtyihin tarkastusmittauksiin antaa niille kuitenkin riittävän vankan pohjan tässä tehtyjen päätelmien tueksi. Työn tarkoitus olikin tutkia, riittääkö absoluuttisen paikannuksen tarkkuus reittien kartoittamiseen, eikä niinkään selvittää mikä laitteiden täsmällinen mittaustarkkuus on. Satelliittipaikannusteknologia on nopeassa muutoksessa juuri tällä hetkellä ja tulee luultavasti lähivuosina kehittymään entisestään tarjoten nyt vielä saavuttamattomat tarkkuudet myös kuluttajien ulottuville. Tekniikan nopean kehittymisen vuoksi asiasta tietoa etsiessä täytyy olla tarkkana, ettei esimerkiksi oleta muutama vuosi sitten kirjoitetun tiedon olevan vielä tänään paikkaansa pitävä. Opinnäytetyön tekeminen eteni sujuvasti ja sain sen tehtyä kohtuullisessa ajassa. Etenemistä edesauttoi huomattavasti se, että aihe oli niin lähellä omia kiinnostuksen kohteitani. Olen tyytyväinen työn laatuun ja tuloksiin ja uskon, että työn ohessa tehdystä reittikartasta tulee olemaan hyötyä muillekin käyttäjille. Uskon myös pohdinnan ja mittausten tarkastelun koskien älypuhelimilla tehtävää reittien kartoitusta hyödyttävän muita, sillä SportsTrackerin kaltaisten sovellusten ansiosta matkapuhelimia ja GPS-kelloja käytetään laajalti omien reittijälkien tallentamiseen ja maastossa seuraamiseen. Varsinaisesti reittien kartoittaminen ei tuonut minulle uusia kokemuksia, mutta laitteilla saatavien mittausten tarkkuudesta saatu tieto oli mielenkiintoista. Myös kartoitettujen reittien käyt-
36 36 tö kartan tekemiseen ja yleisesti karttojen laatiminen oli minulle uutta asiaa, josta sain hyviä kokemuksia työn yhteydessä. Kuten todettua, tulen luultavasti jatkamaan tätä kartoitusprojektia myös opinnäytetyön valmistumisen jälkeen omalla ajalla.
37 37 LÄHTEET Annunen, J., Jokinen, O., Kupari, P., Likitalo, E., Lämsä, J., Nevalainen, P., Nurminen, M., Oikarainen, A., Saarikoski, A., Tela, A., Tuokko, J. & Tuomien, J Maanmittauslaitoksen maastotietokohteet. Helsinki: Edita Prima Oy. Eskola, R. & Peltoniemi, H Viherympäristön mittaustekniikka ja paikkatieto. Tampere: Tammerprint Oy. Federal Aviation Administration 2016a. GNSS Frequently Asked Questions GPS. Viitattu hops/navservices/gnss/faq/gps/#ad b. Satellite Navigation - GPS - How It Works. Viitattu hops/navservices/gnss/gps/howitworks/. 2016c. Satellite Navigation - GPS - Space Segment. Viitattu hops/navservices/gnss/gps/spacesegments/ 2016d. Satellite Navigation - GPS - User Segment Viitattu hops/navservices/gnss/gps/usersegments/ GPS Constellation Status United states naval observatory (usno). Viitattu ftp://tycho.usno.navy.mil/pub/gps/gpstd.txt. GPS.GOV New civil signals. Viitattu Hoffmann-Wellenhof, Lichtenegger & Wasle GNSS Global Navigation Satellite System. Wien: Springer-Verlag. Karttakeskus Oy Mitä on paikkatieto? Laurila, P Mittaus- ja kartoitustekniikan perusteet. Jyväskylä: Kopijyvä Oy. E-kirja. Viitattu _Laurila.pdf Laurila, P Mittaus- ja kartoitustekniikan perusteet. Jyväskylä: Kopijyvä Oy. Maanmittauslaitos Maastotietokohteiden luokitus. Viitattu Maanmittauslaitos Kartat ja paikkatieto. Viitattu
38 38 Miettinen, S GPS käsikirja. Porvoo: WS Bookwell OY. Rubino, D GPS vs. agps: A quick Tutorial. Viitattu Trimble Trimble GPS Tutorial Triangulating. Viitattu van Diggelen, F., Enge, P The World s first GPS MOOC and Worldwide Laboratory using Smartphones. Viitattu
39 39 LIITE Liite 1. Kultalahti, Ounasvaaran maastopyöräilyreitit -kartta
40 LIITE 1
Satelliittipaikannus
 Kolme maailmalaajuista järjestelmää 1. GPS (USAn puolustusministeriö) Täydessä laajuudessaan toiminnassa v. 1994. http://www.navcen.uscg.gov/gps/default.htm 2. GLONASS (Venäjän hallitus) Ilmeisesti 11
Kolme maailmalaajuista järjestelmää 1. GPS (USAn puolustusministeriö) Täydessä laajuudessaan toiminnassa v. 1994. http://www.navcen.uscg.gov/gps/default.htm 2. GLONASS (Venäjän hallitus) Ilmeisesti 11
Satelliittipaikannuksen perusteet
 Satelliittipaikannuksen perusteet 21.02.2018 Koulutuskeskus Sedu, Ilmajoki Satelliittipaikannus tarkoittaa vastaanottimen sijainninmääritystä satelliittijärjestelmien lähettämien radiosignaalien perusteella.
Satelliittipaikannuksen perusteet 21.02.2018 Koulutuskeskus Sedu, Ilmajoki Satelliittipaikannus tarkoittaa vastaanottimen sijainninmääritystä satelliittijärjestelmien lähettämien radiosignaalien perusteella.
Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006
 Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006 Satelliittimittauksen tulevaisuus GPS:n modernisointi, L2C, L5 GALILEO GLONASS GNSS GPS:n modernisointi L2C uusi siviilikoodi L5 uusi taajuus Block
Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006 Satelliittimittauksen tulevaisuus GPS:n modernisointi, L2C, L5 GALILEO GLONASS GNSS GPS:n modernisointi L2C uusi siviilikoodi L5 uusi taajuus Block
Satelliittipaikannuksen tarkkuus hakkuukoneessa. Timo Melkas Mika Salmi Jarmo Hämäläinen
 Satelliittipaikannuksen tarkkuus hakkuukoneessa Timo Melkas Mika Salmi Jarmo Hämäläinen Tavoite Tutkimuksen tavoite oli selvittää nykyisten hakkuukoneissa vakiovarusteena olevien satelliittivastaanottimien
Satelliittipaikannuksen tarkkuus hakkuukoneessa Timo Melkas Mika Salmi Jarmo Hämäläinen Tavoite Tutkimuksen tavoite oli selvittää nykyisten hakkuukoneissa vakiovarusteena olevien satelliittivastaanottimien
5 syytä hyödyntää ensiluokkaista paikannustarkkuutta maastotyöskentelyssä
 5 syytä hyödyntää ensiluokkaista paikannustarkkuutta maastotyöskentelyssä Taskukokoinen, maastokelpoinen Trimble R1 GNSS -vastaanotin mahdollistaa ammattitasoisen paikkatiedonkeruun. Kun R1 yhdistetään
5 syytä hyödyntää ensiluokkaista paikannustarkkuutta maastotyöskentelyssä Taskukokoinen, maastokelpoinen Trimble R1 GNSS -vastaanotin mahdollistaa ammattitasoisen paikkatiedonkeruun. Kun R1 yhdistetään
Matematiikka ja teknologia, kevät 2011
 Matematiikka ja teknologia, kevät 2011 Peter Hästö 13. tammikuuta 2011 Matemaattisten tieteiden laitos Tarkoitus Kurssin tarkoituksena on tutustuttaa ja käydä läpi eräisiin teknologisiin sovelluksiin liittyvää
Matematiikka ja teknologia, kevät 2011 Peter Hästö 13. tammikuuta 2011 Matemaattisten tieteiden laitos Tarkoitus Kurssin tarkoituksena on tutustuttaa ja käydä läpi eräisiin teknologisiin sovelluksiin liittyvää
Markku.Poutanen@fgi.fi
 Global Navigation Satellite Systems GNSS Markku.Poutanen@fgi.fi Kirjallisuutta Poutanen: GPS paikanmääritys, Ursa HUOM: osin vanhentunut, ajantasaistukseen luennolla ilmoitettava materiaali (erit. suomalaiset
Global Navigation Satellite Systems GNSS Markku.Poutanen@fgi.fi Kirjallisuutta Poutanen: GPS paikanmääritys, Ursa HUOM: osin vanhentunut, ajantasaistukseen luennolla ilmoitettava materiaali (erit. suomalaiset
Maanmittauspäivät 2014 Seinäjoki
 Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
Satelliittipaikannuksen perusteet
 Satelliittipaikannuksen perusteet Satelliittipaikannus tarkoittaa vastaanottimen sijainninmääritystä satelliittijärjestelmien lähettämien radiosignaalien perusteella. (public domain, http://www.gps.gov/multimedia/images/constellation.gif
Satelliittipaikannuksen perusteet Satelliittipaikannus tarkoittaa vastaanottimen sijainninmääritystä satelliittijärjestelmien lähettämien radiosignaalien perusteella. (public domain, http://www.gps.gov/multimedia/images/constellation.gif
1) Maan muodon selvittäminen. 2) Leveys- ja pituuspiirit. 3) Mittaaminen
 Maan muodon selvittäminen. 2) Leveys- ja pituuspiirit. 3) Mittaaminen") 1) Maan muodon selvittäminen Nykyään on helppo sanoa, että maa on pallon muotoinen olet todennäköisesti itsekin nähnyt kuvia maasta avaruudesta kuvattuna. Mutta onko maapallomme täydellinen pallo? Tutki
1) Maan muodon selvittäminen Nykyään on helppo sanoa, että maa on pallon muotoinen olet todennäköisesti itsekin nähnyt kuvia maasta avaruudesta kuvattuna. Mutta onko maapallomme täydellinen pallo? Tutki
GPS-koulutus Eräkarkku Petri Kuusela. p
 GPS-koulutus 2018 Eräkarkku Petri Kuusela tulirauta@gmail.com p. 040 772 3720 GPS toiminnallisuudet Missä olen (koordinaatit, kartalla) Opasta minut (navigointi) Paljonko matkaa (navigointi maastossa)
GPS-koulutus 2018 Eräkarkku Petri Kuusela tulirauta@gmail.com p. 040 772 3720 GPS toiminnallisuudet Missä olen (koordinaatit, kartalla) Opasta minut (navigointi) Paljonko matkaa (navigointi maastossa)
Metsäkoneiden sensoritekniikka kehittyy. Heikki Hyyti, Aalto-yliopisto
 Metsäkoneiden sensoritekniikka kehittyy, Metsäkoneiden sensoritekniikka kehittyy Miksi uutta sensoritekniikkaa? Tarkka paikkatieto metsässä Metsäkoneen ja puomin asennon mittaus Konenäkö Laserkeilaus Tietolähteiden
Metsäkoneiden sensoritekniikka kehittyy, Metsäkoneiden sensoritekniikka kehittyy Miksi uutta sensoritekniikkaa? Tarkka paikkatieto metsässä Metsäkoneen ja puomin asennon mittaus Konenäkö Laserkeilaus Tietolähteiden
LIITE 1 VIRHEEN ARVIOINNISTA
 1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
1 Laske ympyrän kehän pituus, kun
 Ympyrään liittyviä harjoituksia 1 Laske ympyrän kehän pituus, kun a) ympyrän halkaisijan pituus on 17 cm b) ympyrän säteen pituus on 1 33 cm 3 2 Kuinka pitkä on ympyrän säde, jos sen kehä on yhden metrin
Ympyrään liittyviä harjoituksia 1 Laske ympyrän kehän pituus, kun a) ympyrän halkaisijan pituus on 17 cm b) ympyrän säteen pituus on 1 33 cm 3 2 Kuinka pitkä on ympyrän säde, jos sen kehä on yhden metrin
LIITE 1 VIRHEEN ARVIOINNISTA
 1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
LIITE 1 VIRHEEN ARVIOINNISTA
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Garmin GPSmap 60CSx -laite
 Garmin GPSmap 60CSx -laite GPS koulutus 20.6.2007 PAIKKATIETOPAJA -hanke Näppäimet ja laitteen osat Power - virta päälle/pois, taustavalon säätö Keinunäppäin valitse vaihtoehtoja / kenttiä, syötä tietoja,
Garmin GPSmap 60CSx -laite GPS koulutus 20.6.2007 PAIKKATIETOPAJA -hanke Näppäimet ja laitteen osat Power - virta päälle/pois, taustavalon säätö Keinunäppäin valitse vaihtoehtoja / kenttiä, syötä tietoja,
Maastotietokantaa käytetään muiden karttatuotteiden valmistukseen sekä erilaisissa optimoinneissa.
 1 of 5 6/20/2018, 12:21 PM Maanmittauslaitos Maastotietokanta Maanmittauslaitoksen Maastotietokanta on koko Suomen kattava maastoa kuvaava aineisto. Sen tärkeimpiä kohderyhmiä ovat liikenneverkko, rakennukset
1 of 5 6/20/2018, 12:21 PM Maanmittauslaitos Maastotietokanta Maanmittauslaitoksen Maastotietokanta on koko Suomen kattava maastoa kuvaava aineisto. Sen tärkeimpiä kohderyhmiä ovat liikenneverkko, rakennukset
Jos ohjeessa on jotain epäselvää, on otettava yhteys Mänttä-Vilppulan kaupungin kiinteistö- ja mittauspalveluihin.
 Kartoitusohje Johdanto Tämä ohje määrittää Mänttä-Vilppulan kaupungille tehtävien kaapelien ja putkien kartoitustyön vaatimukset sekä antaa ohjeet kartoitustyön suorittamiseen. Ohjeessa määritellään kartoituksen
Kartoitusohje Johdanto Tämä ohje määrittää Mänttä-Vilppulan kaupungille tehtävien kaapelien ja putkien kartoitustyön vaatimukset sekä antaa ohjeet kartoitustyön suorittamiseen. Ohjeessa määritellään kartoituksen
Katsaus VRS-teknologian nykytilaan ja tulevaisuuteen
 Seppo Tötterström Katsaus VRS-teknologian nykytilaan ja tulevaisuuteen VRS-teknologia on jo vakiintunut viime vuosina päämenetelmäksi tarkoissa GPS/GNSS-mittaussovelluksissa niin Suomessa, Euroopassa kuin
Seppo Tötterström Katsaus VRS-teknologian nykytilaan ja tulevaisuuteen VRS-teknologia on jo vakiintunut viime vuosina päämenetelmäksi tarkoissa GPS/GNSS-mittaussovelluksissa niin Suomessa, Euroopassa kuin
Access. Käyttöturva. Rahoitus. Assistant. Paikkatieto. VRSnet. GIS-mobiilipalvelut
 Access Käyttöturva Rahoitus Assistant VRSnet Paikkatieto GIS-mobiilipalvelut Mittaustiedon hallinta Trimble Access Tuo maasto ja toimisto lähemmäksi toisiaan Trimble Access Joustava tiedon jakaminen Toimistosta
Access Käyttöturva Rahoitus Assistant VRSnet Paikkatieto GIS-mobiilipalvelut Mittaustiedon hallinta Trimble Access Tuo maasto ja toimisto lähemmäksi toisiaan Trimble Access Joustava tiedon jakaminen Toimistosta
TTY Mittausten koekenttä. Käyttö. Sijainti
 TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää
 Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
PAIKANNUSLAITTEIDEN VAIKUTUKSET MAASTOSSA LIIKKUMISEN TURVALLISUUDELLE
 PAIKANNUSLAITTEIDEN VAIKUTUKSET MAASTOSSA LIIKKUMISEN TURVALLISUUDELLE Sauli Huusko Opinnäytetyö Tekniikka ja liikenne Maanmittaustekniikka Insinööri (AMK) 2016 Opinnäytetyön tiivistelmä Tekniikka ja liikenne
PAIKANNUSLAITTEIDEN VAIKUTUKSET MAASTOSSA LIIKKUMISEN TURVALLISUUDELLE Sauli Huusko Opinnäytetyö Tekniikka ja liikenne Maanmittaustekniikka Insinööri (AMK) 2016 Opinnäytetyön tiivistelmä Tekniikka ja liikenne
Paikkatiedon hyödyntäminen vesiensuojeluyhdistyksissä
 Everything happens somewhere. - Unknown Paikkatiedon hyödyntäminen vesiensuojeluyhdistyksissä Sini Pöytäniemi Paikkatietosuunnittelija Länsi-Uudenmaan vesi ja ympäristö ry 80 % (esim. julkishallinnon tuottamasta)
Everything happens somewhere. - Unknown Paikkatiedon hyödyntäminen vesiensuojeluyhdistyksissä Sini Pöytäniemi Paikkatietosuunnittelija Länsi-Uudenmaan vesi ja ympäristö ry 80 % (esim. julkishallinnon tuottamasta)
Gps-paikantimista on tullut. Satelliitti näyttää suuntaa
 BOEING Satelliitti näyttää suuntaa Gps-järjestelmä tarjoaa reaaliaikaista paikannustietoa ympäri maailman. Satelliittipohjainen navigointijärjestelmä kertoo käyttäjänsä sijainnin muutaman metrin tarkkuudella.
BOEING Satelliitti näyttää suuntaa Gps-järjestelmä tarjoaa reaaliaikaista paikannustietoa ympäri maailman. Satelliittipohjainen navigointijärjestelmä kertoo käyttäjänsä sijainnin muutaman metrin tarkkuudella.
Signaalien taajuusalueet
 Signaalien taajuusalueet 1420 MHz H 2 GPS: kaksi taajuutta, tulevaisuudessa kolme Galileo: useita taajuuksia Kuinka paikannus tehdään? Kantoaalto kahdella taajuudella L1 = 1575.42 MHz = 19.0 cm L2 = 1227.60
Signaalien taajuusalueet 1420 MHz H 2 GPS: kaksi taajuutta, tulevaisuudessa kolme Galileo: useita taajuuksia Kuinka paikannus tehdään? Kantoaalto kahdella taajuudella L1 = 1575.42 MHz = 19.0 cm L2 = 1227.60
RAPORTTI 04013522 12lUMVl2001. Urpo Vihreäpuu. Jakelu. OKMElOutokumpu 2 kpl PAMPALON RTK-KIINTOPISTEET. Sijainti 1:50 000. Avainsanat: RTK-mittaus
 RAPORTTI 04013522 12lUMVl2001 Urpo Vihreäpuu Jakelu OKMElOutokumpu 2 kpl PAMPALON RTK-KIINTOPISTEET - 4333 07 Sijainti 1:50 000 Avainsanat: RTK-mittaus OUTOKUMPU MINING OY Mairninetsnnta RAPORTTI 04013522
RAPORTTI 04013522 12lUMVl2001 Urpo Vihreäpuu Jakelu OKMElOutokumpu 2 kpl PAMPALON RTK-KIINTOPISTEET - 4333 07 Sijainti 1:50 000 Avainsanat: RTK-mittaus OUTOKUMPU MINING OY Mairninetsnnta RAPORTTI 04013522
Puukarttajärjestelmä hakkuun tehostamisessa. Timo Melkas Mikko Miettinen Jarmo Hämäläinen Kalle Einola
 Puukarttajärjestelmä hakkuun tehostamisessa Timo Melkas Mikko Miettinen Jarmo Hämäläinen Kalle Einola Tavoite Tutkimuksessa selvitettiin hakkuukoneeseen kehitetyn puukarttajärjestelmän (Optical Tree Measurement
Puukarttajärjestelmä hakkuun tehostamisessa Timo Melkas Mikko Miettinen Jarmo Hämäläinen Kalle Einola Tavoite Tutkimuksessa selvitettiin hakkuukoneeseen kehitetyn puukarttajärjestelmän (Optical Tree Measurement
Julkinen Mobiililaserkeilaukset rataverkolla
 Julkinen Tero Savolainen & Tommi Turkka 19.9.2018 Julkinen Tero Savolainen 2011 VR Track Oy Ratatekniikka DI, konetekniikka ABB Drive, mekaniikkasuunnittelu Pöyry Civil, teräsrakennesuunnittelu 2009 Infra
Julkinen Tero Savolainen & Tommi Turkka 19.9.2018 Julkinen Tero Savolainen 2011 VR Track Oy Ratatekniikka DI, konetekniikka ABB Drive, mekaniikkasuunnittelu Pöyry Civil, teräsrakennesuunnittelu 2009 Infra
Esimerkki - Näkymätön kuu
 Inversio-ongelmat Inversio = käänteinen, päinvastainen Inversio-ongelmilla tarkoitetaan (suoran) ongelman ratkaisua takaperin. Arkipäiväisiä inversio-ongelmia ovat mm. lääketieteellinen röntgentomografia
Inversio-ongelmat Inversio = käänteinen, päinvastainen Inversio-ongelmilla tarkoitetaan (suoran) ongelman ratkaisua takaperin. Arkipäiväisiä inversio-ongelmia ovat mm. lääketieteellinen röntgentomografia
MAASTOKARTOITUSAINEISTON VISUALISOINTI. Kai Lappalainen, Ramboll Finland Tampere
 MAASTOKARTOITUSAINEISTON VISUALISOINTI Kai Lappalainen, Ramboll Finland Tampere RAMBOLL FINLAND OY Perustettu vuonna 1962 Vuonna 2009 lähes 1200 työntekijää 23 paikkakunnalla Liikevaihto 89,9 M (2009)
MAASTOKARTOITUSAINEISTON VISUALISOINTI Kai Lappalainen, Ramboll Finland Tampere RAMBOLL FINLAND OY Perustettu vuonna 1962 Vuonna 2009 lähes 1200 työntekijää 23 paikkakunnalla Liikevaihto 89,9 M (2009)
Johdatus paikkatietoon
 Johdatus paikkatietoon - Paikkatieto tutuksi - PAIKKATIETOPAJA hanke 9.5.2007 Paikkatiedon määritelmiä Paikannettua kohdetta tai ilmiötä kuvaava sijaintitiedon ja ominaisuustiedon looginen kokonaisuus
Johdatus paikkatietoon - Paikkatieto tutuksi - PAIKKATIETOPAJA hanke 9.5.2007 Paikkatiedon määritelmiä Paikannettua kohdetta tai ilmiötä kuvaava sijaintitiedon ja ominaisuustiedon looginen kokonaisuus
PÄÄSET PERILLE NOPEAMMIN
 TOMTOM TRAFFICIN AVULLA PÄÄSET PERILLE NOPEAMMIN TomTom on johtava liikennepalvelujen tarjoaja. TomTom valvoo, käsittelee ja toimittaa liikennetietoa itse kehittämällään teknologialla. TomTom uskoo, että
TOMTOM TRAFFICIN AVULLA PÄÄSET PERILLE NOPEAMMIN TomTom on johtava liikennepalvelujen tarjoaja. TomTom valvoo, käsittelee ja toimittaa liikennetietoa itse kehittämällään teknologialla. TomTom uskoo, että
Käyttöohje HERE Maps. 1.0. painos FI
 Käyttöohje HERE Maps 1.0. painos FI HERE Maps HERE Maps näyttää lähellä olevat kohteet ja opastaa sinut perille. Voit etsiä kaupunkeja, katuja ja palveluja löytää perille tarkkojen reittiohjeiden avulla
Käyttöohje HERE Maps 1.0. painos FI HERE Maps HERE Maps näyttää lähellä olevat kohteet ja opastaa sinut perille. Voit etsiä kaupunkeja, katuja ja palveluja löytää perille tarkkojen reittiohjeiden avulla
Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen
 Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen Mittausten laadun tarkastus ja muunnoskertoimien laskenta Kyösti Laamanen 2.0 4.10.2013 Prosito 1 (9) SISÄLTÖ 1 YLEISTÄ...
Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen Mittausten laadun tarkastus ja muunnoskertoimien laskenta Kyösti Laamanen 2.0 4.10.2013 Prosito 1 (9) SISÄLTÖ 1 YLEISTÄ...
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta
 Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
KOORDINAATTI- JA KORKEUSJÄRJESTELMIEN VAIHTO TURUSSA 15.2.2010
 KOORDINAATTI- JA KORKEUSJÄRJESTELMIEN VAIHTO TURUSSA 15.2.2010 Ilkka Saarimäki Kaupungingeodeetti Kiinteistöliikelaitos Kaupunkimittauspalvelut ilkka.saarimaki@turku.fi VANHAT JÄRJESTELMÄT Turun kaupungissa
KOORDINAATTI- JA KORKEUSJÄRJESTELMIEN VAIHTO TURUSSA 15.2.2010 Ilkka Saarimäki Kaupungingeodeetti Kiinteistöliikelaitos Kaupunkimittauspalvelut ilkka.saarimaki@turku.fi VANHAT JÄRJESTELMÄT Turun kaupungissa
4. 10.2010 ACCELBIT KARTTASELAIN TRACKER. Karttaselaimen Tracker- sovelluksen käyttöohje versio 1.0 AccelBit Oy
 4. 10.2010 ACCELBIT OY KARTTASELAIN TRACKER Karttaselaimen Tracker- sovelluksen käyttöohje versio 1.0 AccelBit Oy Sisältö Laitteistovaatimukset...3 Yleisesittely...3 Versiohistoria...3 Karttaselain Tracker
4. 10.2010 ACCELBIT OY KARTTASELAIN TRACKER Karttaselaimen Tracker- sovelluksen käyttöohje versio 1.0 AccelBit Oy Sisältö Laitteistovaatimukset...3 Yleisesittely...3 Versiohistoria...3 Karttaselain Tracker
Lajittelumenetelmät ilmakehän kaukokartoituksen laadun tarkkailussa (valmiin työn esittely)
") Lajittelumenetelmät ilmakehän kaukokartoituksen laadun tarkkailussa (valmiin työn esittely) Viivi Halla-aho 30.9.2013 Ohjaaja: Dos. Johanna Tamminen Valvoja: Prof. Harri Ehtamo Työn saa tallentaa ja julkistaa
Lajittelumenetelmät ilmakehän kaukokartoituksen laadun tarkkailussa (valmiin työn esittely) Viivi Halla-aho 30.9.2013 Ohjaaja: Dos. Johanna Tamminen Valvoja: Prof. Harri Ehtamo Työn saa tallentaa ja julkistaa
Luonnonraaka-ainekartat - paikkatiedon hyödyntämismahdollisuudet
 Luonnonraaka-ainekartat - paikkatiedon hyödyntämismahdollisuudet Kaustinen 28.3.2017 Ron Store Runko Paikkatieto ja paikkatietojärjestelmät Raaka-ainekartat Metsänomistajakyselyn tulokset: suhtautuminen
Luonnonraaka-ainekartat - paikkatiedon hyödyntämismahdollisuudet Kaustinen 28.3.2017 Ron Store Runko Paikkatieto ja paikkatietojärjestelmät Raaka-ainekartat Metsänomistajakyselyn tulokset: suhtautuminen
Paikkatieto-ohjelmistot maataloudessa ATKO
 Paikkatieto-ohjelmistot maataloudessa ATKO 7.2.2018 Koulutuksen ohjelma Klo 17-18 Paikkatiedon teoriaa Klo 18-18.30 Maatalouden sovelluksia Klo 18.30-19 QGISin esittely Klo 19-21 QGISin käytön opettelu
Paikkatieto-ohjelmistot maataloudessa ATKO 7.2.2018 Koulutuksen ohjelma Klo 17-18 Paikkatiedon teoriaa Klo 18-18.30 Maatalouden sovelluksia Klo 18.30-19 QGISin esittely Klo 19-21 QGISin käytön opettelu
SATELLIITTIMITTAUS MAANRAKENTAMISESSA JA MAANMITTAUSKALUSTON HANKINNAN SUUNNITTELU
 OPINNÄYTETYÖ - AMMATTIKORKEAKOULUTUTKINTO TEKNIIKAN JA LIIKENTEEN ALA SATELLIITTIMITTAUS MAANRAKENTAMISESSA JA MAANMITTAUSKALUSTON HANKINNAN SUUNNITTELU T E K I J Ä : Josi Kokkonen SAVONIA-AMMATTIKORKEAKOULU
OPINNÄYTETYÖ - AMMATTIKORKEAKOULUTUTKINTO TEKNIIKAN JA LIIKENTEEN ALA SATELLIITTIMITTAUS MAANRAKENTAMISESSA JA MAANMITTAUSKALUSTON HANKINNAN SUUNNITTELU T E K I J Ä : Josi Kokkonen SAVONIA-AMMATTIKORKEAKOULU
KARELIA-AMMATTIKORKEAKOULU Metsätalouden koulutusohjelma. Niko Piironen GNSS-LAITETESTI SUOMEN METSÄKESKUKSELLE
 KARELIA-AMMATTIKORKEAKOULU Metsätalouden koulutusohjelma Niko Piironen GNSS-LAITETESTI SUOMEN METSÄKESKUKSELLE Opinnäytetyö Marraskuu 2015 OPINNÄYTETYÖ Marraskuu 2015 Metsätalouden koulutusohjelma Tekijä(t)
KARELIA-AMMATTIKORKEAKOULU Metsätalouden koulutusohjelma Niko Piironen GNSS-LAITETESTI SUOMEN METSÄKESKUKSELLE Opinnäytetyö Marraskuu 2015 OPINNÄYTETYÖ Marraskuu 2015 Metsätalouden koulutusohjelma Tekijä(t)
FINNREF- TUKIASEMAVERKKO/PAIKANNUS- PALVELU JA SEN KEHITTÄMINEN
 FINNREF- TUKIASEMAVERKKO/PAIKANNUS- PALVELU JA SEN KEHITTÄMINEN 22.3.2018 Maanmittauspäivät 2018 Marko Ollikainen 1 Esityksen sisältö: - Taustaa - Nyt - Tulevaisuutta FINNREF TUKIASEMAVERKKO JA PAIKANNUSPALVELU
FINNREF- TUKIASEMAVERKKO/PAIKANNUS- PALVELU JA SEN KEHITTÄMINEN 22.3.2018 Maanmittauspäivät 2018 Marko Ollikainen 1 Esityksen sisältö: - Taustaa - Nyt - Tulevaisuutta FINNREF TUKIASEMAVERKKO JA PAIKANNUSPALVELU
ETRS89- kiintopisteistön nykyisyys ja tulevaisuus. Jyrki Puupponen Kartastoinsinööri Etelä-Suomen maanmittaustoimisto
 ETRS89- kiintopisteistön nykyisyys ja tulevaisuus Jyrki Puupponen Kartastoinsinööri Etelä-Suomen maanmittaustoimisto Valtakunnalliset kolmiomittaukset alkavat. Helsingin järjestelmä (vanha valtion järjestelmä)
ETRS89- kiintopisteistön nykyisyys ja tulevaisuus Jyrki Puupponen Kartastoinsinööri Etelä-Suomen maanmittaustoimisto Valtakunnalliset kolmiomittaukset alkavat. Helsingin järjestelmä (vanha valtion järjestelmä)
Korkeusmallien vertailua ja käyttö nitraattiasetuksen soveltamisessa
 Korkeusmallien vertailua ja käyttö nitraattiasetuksen soveltamisessa Valtakunnallisesti kattavaa laserkeilausaineistoa ei vielä ole. Kaltevuusmallit perustuvat tällä hetkellä digitaalisen korkeusmallin
Korkeusmallien vertailua ja käyttö nitraattiasetuksen soveltamisessa Valtakunnallisesti kattavaa laserkeilausaineistoa ei vielä ole. Kaltevuusmallit perustuvat tällä hetkellä digitaalisen korkeusmallin
33 SOLENOIDIN JA TOROIDIN MAGNEETTIKENTTÄ
 TYÖOHJE 14.7.2010 JMK, TSU 33 SOLENOIDIN JA TOROIDIN MAGNEETTIKENTTÄ Laitteisto: Kuva 1. Kytkentä solenoidin ja toroidin magneettikenttien mittausta varten. Käytä samaa digitaalista jännitemittaria molempien
TYÖOHJE 14.7.2010 JMK, TSU 33 SOLENOIDIN JA TOROIDIN MAGNEETTIKENTTÄ Laitteisto: Kuva 1. Kytkentä solenoidin ja toroidin magneettikenttien mittausta varten. Käytä samaa digitaalista jännitemittaria molempien
Kolmioitten harjoituksia. Säännöllisten monikulmioitten harjoituksia. Pythagoraan lauseeseen liittyviä harjoituksia
 Kolmioitten harjoituksia Piirrä kolmio, jonka sivujen pituudet ovat 4cm, 5 cm ja 10 cm. Minkä yleisen kolmion sivujen pituuksia ja niitten eroja koskevan johtopäätöksen vedät? Määritä huippukulman α suuruus,
Kolmioitten harjoituksia Piirrä kolmio, jonka sivujen pituudet ovat 4cm, 5 cm ja 10 cm. Minkä yleisen kolmion sivujen pituuksia ja niitten eroja koskevan johtopäätöksen vedät? Määritä huippukulman α suuruus,
Videon tallentaminen Virtual Mapista
 Videon tallentaminen Virtual Mapista Kamera-ajon tekeminen Karkean kamera ajon teko onnistuu nopeammin Katseluohjelmassa (Navigointi > Näkymät > Tallenna polku). Liikeradan ja nopeuden tarkka hallinta
Videon tallentaminen Virtual Mapista Kamera-ajon tekeminen Karkean kamera ajon teko onnistuu nopeammin Katseluohjelmassa (Navigointi > Näkymät > Tallenna polku). Liikeradan ja nopeuden tarkka hallinta
Projektinhallintaa paikkatiedon avulla
 Projektinhallintaa paikkatiedon avulla Tampereen Teknillinen Yliopisto / Porin laitos Teemu Kumpumäki teemu.kumpumaki@tut.fi 25.6.2015 1 Paikkatieto ja projektinhallinta Paikkatiedon käyttäminen projektinhallinnassa
Projektinhallintaa paikkatiedon avulla Tampereen Teknillinen Yliopisto / Porin laitos Teemu Kumpumäki teemu.kumpumaki@tut.fi 25.6.2015 1 Paikkatieto ja projektinhallinta Paikkatiedon käyttäminen projektinhallinnassa
Ohjeita 2015 www.fillarirastit.com Hiiltomiehet. VERSIO 1 (2015) http://www.fillarirastit.com/ohjeet/pyorasuunnistus.
 http://www.fillarirastit.com/ohjeet/pyorasuunnistus.") Ohjeita 2015 www.fillarirastit.com Hiiltomiehet Kuva: Jari Yli-Hietanen Muutamia pyöräsuunnistuksen erityisjuttuja Polkukuvaus, kertoo polun ajettavuuden Mitä yhtenäisempi viiva sitä nopeampi sitä on ajaa
Ohjeita 2015 www.fillarirastit.com Hiiltomiehet Kuva: Jari Yli-Hietanen Muutamia pyöräsuunnistuksen erityisjuttuja Polkukuvaus, kertoo polun ajettavuuden Mitä yhtenäisempi viiva sitä nopeampi sitä on ajaa
KARTTAILTAPÄIVÄ 27.9.09 Haukkavuori Paikalla: Ari Hietanen Kari Hovi Heikki Kyyrönen Seppo Tuominen Kari Ylönen Asko Määttä.
 KARTTAILTAPÄIVÄ 27.9.09 Haukkavuori Paikalla: Ari Hietanen Kari Hovi Heikki Kyyrönen Seppo Tuominen Kari Ylönen Asko Määttä Askon jutustelu GPS:n 1 vaihe 2000-2007 Mittaukset maastossa tallentimeen; DGPS
KARTTAILTAPÄIVÄ 27.9.09 Haukkavuori Paikalla: Ari Hietanen Kari Hovi Heikki Kyyrönen Seppo Tuominen Kari Ylönen Asko Määttä Askon jutustelu GPS:n 1 vaihe 2000-2007 Mittaukset maastossa tallentimeen; DGPS
Tehtävä 1: Arjen argumentaatiota
 Tehtävä 1: Arjen argumentaatiota 1. Kerro omin sanoin, mitä argumentissa A väitetään? Entä argumentissa B? 2. Kumpi argumentti on vakuuttavampi? Mikä siitä tekee vakuuttavamman? Argumentti A: Pyörällä
Tehtävä 1: Arjen argumentaatiota 1. Kerro omin sanoin, mitä argumentissa A väitetään? Entä argumentissa B? 2. Kumpi argumentti on vakuuttavampi? Mikä siitä tekee vakuuttavamman? Argumentti A: Pyörällä
Vanhankaupunginkosken ultraäänikuvaukset Simsonar Oy Pertti Paakkolanvaara
 Vanhankaupunginkosken ultraäänikuvaukset 15.7. 14.11.2014 Simsonar Oy Pertti Paakkolanvaara Avaintulokset 2500 2000 Ylös vaellus pituusluokittain: 1500 1000 500 0 35-45 cm 45-60 cm 60-70 cm >70 cm 120
Vanhankaupunginkosken ultraäänikuvaukset 15.7. 14.11.2014 Simsonar Oy Pertti Paakkolanvaara Avaintulokset 2500 2000 Ylös vaellus pituusluokittain: 1500 1000 500 0 35-45 cm 45-60 cm 60-70 cm >70 cm 120
1 Tieteellinen esitystapa, yksiköt ja dimensiot
 1 Tieteellinen esitystapa, yksiköt ja dimensiot 1.1 Tieteellinen esitystapa Maan ja auringon välinen etäisyys on 1 AU. AU on astronomical unit, joka määritelmänsä mukaan on maan ja auringon välinen keskimääräinen
1 Tieteellinen esitystapa, yksiköt ja dimensiot 1.1 Tieteellinen esitystapa Maan ja auringon välinen etäisyys on 1 AU. AU on astronomical unit, joka määritelmänsä mukaan on maan ja auringon välinen keskimääräinen
y=-3x+2 y=2x-3 y=3x+2 x = = 6
 MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
Käyttöohje. Model #s: 36-0050 / 36-0051 / 36-0052 / 36-0053 / 35-0055 (US) 36-0060 / 36-0061 / 36-0062 / 36-0063 / 36-0065 (EU) Lit# 98-1257 / 07-08
 36-0060 / 36-0061 / 36-0062 / 36-0063 / 36-0065 (EU) Lit# 98-1257 / 07-08") Käyttöohje Model #s: 36-0050 / 36-0051 / 36-0052 / 36-0053 / 35-0055 (US) 36-0060 / 36-0061 / 36-0062 / 36-0063 / 36-0065 (EU) Lit# 98-1257 / 07-08 Näppäimet ja näyttö Suuntanuolet MERKKI/Taustavalo- näppäin
Käyttöohje Model #s: 36-0050 / 36-0051 / 36-0052 / 36-0053 / 35-0055 (US) 36-0060 / 36-0061 / 36-0062 / 36-0063 / 36-0065 (EU) Lit# 98-1257 / 07-08 Näppäimet ja näyttö Suuntanuolet MERKKI/Taustavalo- näppäin
GPS Miten opin käyttämään? Mihin käytän?
 GPS Miten opin käyttämään? Mihin käytän? Perusohjeita GPS-reitin siirtämisestä kartalle, Vinkkejä oman suunnistustekniikan analysoimiseen GPS-tiedon avulla Kuvat alla: o-training.net ja worldofo.com GPS-viiva
GPS Miten opin käyttämään? Mihin käytän? Perusohjeita GPS-reitin siirtämisestä kartalle, Vinkkejä oman suunnistustekniikan analysoimiseen GPS-tiedon avulla Kuvat alla: o-training.net ja worldofo.com GPS-viiva
Täsmäviljelyn teknologia nyt ja tulevaisuudessa. Date / Person in charge 2
 Täsmäviljelyn teknologia nyt ja tulevaisuudessa Date / Person in charge 2 Sisältö 1 Yleistilanne tarkkuusviljelyteknologiassa 2 Paikantaminen 3 Auto-Guide 3000 4 IsoBUS 5 Hyödyt 6 Tulevaisuus Date / Person
Täsmäviljelyn teknologia nyt ja tulevaisuudessa Date / Person in charge 2 Sisältö 1 Yleistilanne tarkkuusviljelyteknologiassa 2 Paikantaminen 3 Auto-Guide 3000 4 IsoBUS 5 Hyödyt 6 Tulevaisuus Date / Person
GPS lintulaskennoissa. Oriveden lintulaskijatapaaminen 12.3.2016 Heikki-Pekka Innala
 GPS lintulaskennoissa Oriveden lintulaskijatapaaminen 12.3.2016 Heikki-Pekka Innala Gps-laitteista Tarkkuus parantunut 3-4 metriin (häirinnän lopetus ja GPS + GLONASS-kaksoissatelliittijärjestelmä) paranemassa
GPS lintulaskennoissa Oriveden lintulaskijatapaaminen 12.3.2016 Heikki-Pekka Innala Gps-laitteista Tarkkuus parantunut 3-4 metriin (häirinnän lopetus ja GPS + GLONASS-kaksoissatelliittijärjestelmä) paranemassa
Karttaselain Paikannin J2ME
 Karttaselain Paikannin J2ME Käyttöohje Päivitetty 8.9.2014 Sisältö Tervetuloa...3 Tuetut laitteet...3 Sovelluksen lataaminen...3 Päänäyttö...4 Sovelluksen valikko...5 Laitetunniste (IMEI-koodi)...5 Sovelluksen
Karttaselain Paikannin J2ME Käyttöohje Päivitetty 8.9.2014 Sisältö Tervetuloa...3 Tuetut laitteet...3 Sovelluksen lataaminen...3 Päänäyttö...4 Sovelluksen valikko...5 Laitetunniste (IMEI-koodi)...5 Sovelluksen
Firmaliiga Högbacka
 Firmaliiga 16.5.2017 Högbacka Analyysi reittihärvelipiirrosten pohjalta A-rata 3-4: Pitkä väli, jossa oli useita eri reitinvalintavaihtoehtoja. Haasteita oli rastilta lähdössä ja toteutuksen sujuvuudessa.
Firmaliiga 16.5.2017 Högbacka Analyysi reittihärvelipiirrosten pohjalta A-rata 3-4: Pitkä väli, jossa oli useita eri reitinvalintavaihtoehtoja. Haasteita oli rastilta lähdössä ja toteutuksen sujuvuudessa.
Algoritmi I kuvioiden ja niille johtavien ajourien erottelu. Metsätehon tuloskalvosarja 7a/2018 LIITE 1 Timo Melkas Kirsi Riekki Metsäteho Oy
 Algoritmi I kuvioiden ja niille johtavien ajourien erottelu Metsätehon tuloskalvosarja 7a/2018 LIITE 1 Timo Melkas Kirsi Riekki Metsäteho Oy Algoritmi I kuvioiden ja niille johtavien ajourien erottelu
Algoritmi I kuvioiden ja niille johtavien ajourien erottelu Metsätehon tuloskalvosarja 7a/2018 LIITE 1 Timo Melkas Kirsi Riekki Metsäteho Oy Algoritmi I kuvioiden ja niille johtavien ajourien erottelu
PRE/InfraFINBIM tietomallivaatimukset ja ohjeet AP3 Suunnittelun ja rakentamisen uudet prosessit
 Built Environment Process Re-engineering PRE PRE/InfraFINBIM tietomallivaatimukset ja ohjeet AP3 Suunnittelun ja rakentamisen uudet prosessit 18.03.2014 Osa 12: Tietomallin hyödyntäminen infran rakentamisessa
Built Environment Process Re-engineering PRE PRE/InfraFINBIM tietomallivaatimukset ja ohjeet AP3 Suunnittelun ja rakentamisen uudet prosessit 18.03.2014 Osa 12: Tietomallin hyödyntäminen infran rakentamisessa
JHS-suositus(luonnos): Kiintopistemittaus EUREF-FIN koordinaattijärjestelmässä
: Kiintopistemittaus EUREF-FIN koordinaattijärjestelmässä") JHS-suositus(luonnos): Kiintopistemittaus EUREF-FIN koordinaattijärjestelmässä EUREF-II -päivä 2012 Marko Ollikainen Kehittämiskeskus Maanmittauslaitos MAANMITTAUSLAITOS TIETOA MAASTA Mittausohjeiden uudistamisesta
JHS-suositus(luonnos): Kiintopistemittaus EUREF-FIN koordinaattijärjestelmässä EUREF-II -päivä 2012 Marko Ollikainen Kehittämiskeskus Maanmittauslaitos MAANMITTAUSLAITOS TIETOA MAASTA Mittausohjeiden uudistamisesta
DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI
 DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI Tekijä: Marko Olli 16.10.2018 Sisällys 1 Johdanto...3 2 Hankkeen tavoitteet ja vaikuttavuus...3 3 Laitteisto ja mittaustarkkuus...3 4 Pilotointi ja
DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI Tekijä: Marko Olli 16.10.2018 Sisällys 1 Johdanto...3 2 Hankkeen tavoitteet ja vaikuttavuus...3 3 Laitteisto ja mittaustarkkuus...3 4 Pilotointi ja
GPS:n käyttö sähkönjakeluyhtiöissä
 LAPPEENRANNAN TEKNILLINEN YLIOPISTO LAPPEENRANNAN TEKNILLINEN YLIOPISTO SÄHKÖTEKNIIKAN OSASTO 080450000 Sähkömarkkinoiden seminaari SEMINAARITYÖ 31.03.2004 Vesa Pirinen 0083055 Säte 5 GPS:n käyttö sähkönjakeluyhtiöissä
LAPPEENRANNAN TEKNILLINEN YLIOPISTO LAPPEENRANNAN TEKNILLINEN YLIOPISTO SÄHKÖTEKNIIKAN OSASTO 080450000 Sähkömarkkinoiden seminaari SEMINAARITYÖ 31.03.2004 Vesa Pirinen 0083055 Säte 5 GPS:n käyttö sähkönjakeluyhtiöissä
Paikkatietojärjestelmät
 Paikkatietojärjestelmät Engl. GIS, Geographical Information Systems. Paikkatieto on tietoa, johon liittyy maantieteellinen sijainti (koordinaatit). Paikkatieto esitetään taulukkona jossa on kunkin sijainnin
Paikkatietojärjestelmät Engl. GIS, Geographical Information Systems. Paikkatieto on tietoa, johon liittyy maantieteellinen sijainti (koordinaatit). Paikkatieto esitetään taulukkona jossa on kunkin sijainnin
GPS:n käyttö pinta-alan mittauksessa
 Osakkaiden yhteishanke GPS:n käyttö pinta-alan mittauksessa Pikatesti kahdella GPS-laitteella Timo Hokka Metsätehon raportti 98 10.10.2000 GPS:n käyttö pinta-alan mittauksessa Pikatesti kahdella GPS-laitteella
Osakkaiden yhteishanke GPS:n käyttö pinta-alan mittauksessa Pikatesti kahdella GPS-laitteella Timo Hokka Metsätehon raportti 98 10.10.2000 GPS:n käyttö pinta-alan mittauksessa Pikatesti kahdella GPS-laitteella
Tuntisuunnitelma: Teema 3
 Tuntisuunnitelma: Teema 3 Aika: Oppimiskokonaisuuden 3. oppitunti Mobiililaboratorio-oppimiskokonaisuus, 7.-9. lk Aihe: Tulkitaan mittaustuloksia paikkatiedon avulla Oppitunnin tavoitteet: Oppilaat tutustuvat
Tuntisuunnitelma: Teema 3 Aika: Oppimiskokonaisuuden 3. oppitunti Mobiililaboratorio-oppimiskokonaisuus, 7.-9. lk Aihe: Tulkitaan mittaustuloksia paikkatiedon avulla Oppitunnin tavoitteet: Oppilaat tutustuvat
Kemiönsaaren Nordanån merikotkatarkkailu kesällä 2017
 Kemiönsaaren Nordanån merikotkatarkkailu kesällä 2017 Tmi Vespertilio 11.8.2017 Tiivistelmä Kemiönsaaren Nordanå-Lövbölen alueelle suunnitellaan tuulivoimapuistoa. Varsinais-Suomen ELYkeskus on vuonna
Kemiönsaaren Nordanån merikotkatarkkailu kesällä 2017 Tmi Vespertilio 11.8.2017 Tiivistelmä Kemiönsaaren Nordanå-Lövbölen alueelle suunnitellaan tuulivoimapuistoa. Varsinais-Suomen ELYkeskus on vuonna
Collector for ArcGIS. Ohje /
 Collector for ArcGIS Ohje / 10.5.2019 2 (11) Sisältö 1. Collector for ArcGIS... 3 2. Kartan luominen ArcGIS Onlinessa... 3 2.1 Karttatason luominen... 3 2.2 Ominaisuustietotaulun kenttien määrittäminen...
Collector for ArcGIS Ohje / 10.5.2019 2 (11) Sisältö 1. Collector for ArcGIS... 3 2. Kartan luominen ArcGIS Onlinessa... 3 2.1 Karttatason luominen... 3 2.2 Ominaisuustietotaulun kenttien määrittäminen...
Tervetuloa Aikuisten suunnistuskouluun 2019
 Tervetuloa Aikuisten suunnistuskouluun 2019 Koskaan ei eksy helpommin kuin silloin kun luulee tietävänsä tien Kiinalainen sananlasku Suunnistaminen on koko ajan tapahtuvaa havainnointia, analysointia ja
Tervetuloa Aikuisten suunnistuskouluun 2019 Koskaan ei eksy helpommin kuin silloin kun luulee tietävänsä tien Kiinalainen sananlasku Suunnistaminen on koko ajan tapahtuvaa havainnointia, analysointia ja
Kenguru 2012 Student sivu 1 / 8 (lukion 2. ja 3. vuosi)
") Kenguru 2012 Student sivu 1 / 8 Nimi Ryhmä Pisteet: Kenguruloikan pituus: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto. Väärästä vastauksesta
Kenguru 2012 Student sivu 1 / 8 Nimi Ryhmä Pisteet: Kenguruloikan pituus: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto. Väärästä vastauksesta
Navigointi/suunnistus
 Navigointi/suunnistus Aiheita Kartan ja kompassin käyttö Mittakaavat Koordinaatistot Karttapohjoinen/neulapohjoinen Auringon avulla suunnistaminen GPS:n käyttö Reitin/jäljen luonti tietokoneella Reittipisteet
Navigointi/suunnistus Aiheita Kartan ja kompassin käyttö Mittakaavat Koordinaatistot Karttapohjoinen/neulapohjoinen Auringon avulla suunnistaminen GPS:n käyttö Reitin/jäljen luonti tietokoneella Reittipisteet
Paikantaminen Nokia N76-1
 Paikantaminen Nokia N76-1 2007 Nokia. Kaikki oikeudet pidätetään. Nokia, Nokia Connecting People, Nseries ja N76 ovat Nokia Oyj:n tavaramerkkejä tai rekisteröityjä tavaramerkkejä. Muut tässä asiakirjassa
Paikantaminen Nokia N76-1 2007 Nokia. Kaikki oikeudet pidätetään. Nokia, Nokia Connecting People, Nseries ja N76 ovat Nokia Oyj:n tavaramerkkejä tai rekisteröityjä tavaramerkkejä. Muut tässä asiakirjassa
ASUINKERROSTALON ÄÄNITEKNISEN LAADUN ARVIOINTI. Mikko Kylliäinen
 ASUINKERROSTALON ÄÄNITEKNISEN LAADUN ARVIOINTI Mikko Kylliäinen Insinööritoimisto Heikki Helimäki Oy Dagmarinkatu 8 B 18, 00100 Helsinki kylliainen@kotiposti.net 1 JOHDANTO Suomen rakentamismääräyskokoelman
ASUINKERROSTALON ÄÄNITEKNISEN LAADUN ARVIOINTI Mikko Kylliäinen Insinööritoimisto Heikki Helimäki Oy Dagmarinkatu 8 B 18, 00100 Helsinki kylliainen@kotiposti.net 1 JOHDANTO Suomen rakentamismääräyskokoelman
KUUSAMO TEOLLISUUSALUEEN OSAYLEISKAAVA ARKEOLOGINEN INVENTOINTI 2017
 Kuusamon kaupunki KUUSAMO TEOLLISUUSALUEEN OSAYLEISKAAVA ARKEOLOGINEN INVENTOINTI 2017 Laatinut FM Kalle Luoto Kuusamo Arkeologinen inventointi SISÄLLYSLUETTELO 1 Johdanto... 1 3 Perustietoa inventointialueesta...
Kuusamon kaupunki KUUSAMO TEOLLISUUSALUEEN OSAYLEISKAAVA ARKEOLOGINEN INVENTOINTI 2017 Laatinut FM Kalle Luoto Kuusamo Arkeologinen inventointi SISÄLLYSLUETTELO 1 Johdanto... 1 3 Perustietoa inventointialueesta...
Paikkatietoon yhdistetyn koneistutuksen kehittäminen Pohjois-Pohjanmaalla
 Paikkatietoon yhdistetyn koneistutuksen kehittäminen Pohjois-Pohjanmaalla Katja Kangas ja Miia Parviainen 4.12.2014 Kuvat: Miia Parviainen/Metla Hankkeen taustaa Metsänhoidon koneellistuminen Koneelliseen
Paikkatietoon yhdistetyn koneistutuksen kehittäminen Pohjois-Pohjanmaalla Katja Kangas ja Miia Parviainen 4.12.2014 Kuvat: Miia Parviainen/Metla Hankkeen taustaa Metsänhoidon koneellistuminen Koneelliseen
Neuroverkkojen soveltaminen vakuutusdatojen luokitteluun
 Neuroverkkojen soveltaminen vakuutusdatojen luokitteluun Sami Hokuni 12 Syyskuuta, 2012 1/ 54 Sami Hokuni Neuroverkkojen soveltaminen vakuutusdatojen luokitteluun Turun Yliopisto. Gradu tehty 2012 kevään
Neuroverkkojen soveltaminen vakuutusdatojen luokitteluun Sami Hokuni 12 Syyskuuta, 2012 1/ 54 Sami Hokuni Neuroverkkojen soveltaminen vakuutusdatojen luokitteluun Turun Yliopisto. Gradu tehty 2012 kevään
Radiotekniikan sovelluksia
 Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
Muita kuvankäsittelyohjelmia on mm. Paint Shop Pro, Photoshop Elements, Microsoft Office Picture Manager
 Missio: 1. Asentaminen 2. Valokuvien tarkastelu, tallennus/formaatit, koko, tarkkuus, korjaukset/suotimet, rajaus 3. Kuvan luonti/työkalut (grafiikka kuvat) 4. Tekstin/grafiikan lisääminen kuviin, kuvien/grafiikan
Missio: 1. Asentaminen 2. Valokuvien tarkastelu, tallennus/formaatit, koko, tarkkuus, korjaukset/suotimet, rajaus 3. Kuvan luonti/työkalut (grafiikka kuvat) 4. Tekstin/grafiikan lisääminen kuviin, kuvien/grafiikan
Kelluvien turvalaitteiden. asennus- ja mittausohje
 Kelluvien turvalaitteiden asennus- ja mittausohje 2009 Versio 0.4 Sivu 1 (9) 14.9.2009 Ohjeen infosivu: Kelluvien turvalaitteiden asennus- ja mittausohje Versio: 0.3 / 28.8.2009 laatinut IK Status: Yleisohje
Kelluvien turvalaitteiden asennus- ja mittausohje 2009 Versio 0.4 Sivu 1 (9) 14.9.2009 Ohjeen infosivu: Kelluvien turvalaitteiden asennus- ja mittausohje Versio: 0.3 / 28.8.2009 laatinut IK Status: Yleisohje
Vektorien pistetulo on aina reaaliluku. Esimerkiksi vektorien v = (3, 2, 0) ja w = (1, 2, 3) pistetulo on
 ja w = (1, 2, 3) pistetulo on") 13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
Lataa Satelliittipaikannus - Markku Poutanen. Lataa
 Lataa Satelliittipaikannus - Markku Poutanen Lataa Kirjailija: Markku Poutanen ISBN: 9789525985412 Sivumäärä: 351 Formaatti: PDF Tiedoston koko: 23.50 Mb Satelliittipaikannus kertoo kattavasti paikannuslaitteiden
Lataa Satelliittipaikannus - Markku Poutanen Lataa Kirjailija: Markku Poutanen ISBN: 9789525985412 Sivumäärä: 351 Formaatti: PDF Tiedoston koko: 23.50 Mb Satelliittipaikannus kertoo kattavasti paikannuslaitteiden
KRYSP-seminaari 24.11.2011 MML:n maastotietokannan ylläpito
 KRYSP-seminaari 24.11.2011 MML:n maastotietokannan ylläpito Jurkka Tuokko Maanmittauslaitos Maastotietokanta Maanmittauslaitoksen ylläpitämä valtakunnallinen paikkatietoaineisto, joka sisältää tietoja
KRYSP-seminaari 24.11.2011 MML:n maastotietokannan ylläpito Jurkka Tuokko Maanmittauslaitos Maastotietokanta Maanmittauslaitoksen ylläpitämä valtakunnallinen paikkatietoaineisto, joka sisältää tietoja
Tilastokeskuksen postinumeroalueittaisen avoimen tiedon käyttäminen ArcGIS Onlinessa
 Tilastokeskuksen postinumeroalueittaisen avoimen tiedon käyttäminen ArcGIS Onlinessa Tilastokeskuksen postinumeroalueittaisen avoimen tiedon käyttäminen ArcGIS Onlinessa... 1 1. Mikä on Paavo-aineisto?...
Tilastokeskuksen postinumeroalueittaisen avoimen tiedon käyttäminen ArcGIS Onlinessa Tilastokeskuksen postinumeroalueittaisen avoimen tiedon käyttäminen ArcGIS Onlinessa... 1 1. Mikä on Paavo-aineisto?...
Pointer GPS 2008 matkapuhelimiin tarkoitettu maastonavigaattori.
 Yleistä Pointer GPS 2008 matkapuhelimiin tarkoitettu maastonavigaattori. Helppo ja monipuolinen maastonavigointiohjelma matkapuhelimeen. Selkeät maastokartat useissa eri mittakaavoissa, myös ulkomailla.
Yleistä Pointer GPS 2008 matkapuhelimiin tarkoitettu maastonavigaattori. Helppo ja monipuolinen maastonavigointiohjelma matkapuhelimeen. Selkeät maastokartat useissa eri mittakaavoissa, myös ulkomailla.
JHS 158 Paikkatiedon metatiedot Liite 6: Esimerkki XML-koodauksesta Versio: Julkaistu: Voimassaoloaika:
 JHS 158 Paikkatiedon metatiedot Liite 6: Esimerkki XML-koodauksesta Versio: Julkaistu: Voimassaoloaika: Esimerkki XML-koodauksesta Tässä liitteessä on annettu esimerkki metatiedon sisällöstä paikkatietoaineistoon
JHS 158 Paikkatiedon metatiedot Liite 6: Esimerkki XML-koodauksesta Versio: Julkaistu: Voimassaoloaika: Esimerkki XML-koodauksesta Tässä liitteessä on annettu esimerkki metatiedon sisällöstä paikkatietoaineistoon
Scratch ohjeita. Perusteet
 Perusteet Scratch ohjeita Scratch on graafinen ohjelmointiympäristö koodauksen opetteluun. Se soveltuu hyvin alakouluista yläkouluunkin asti, sillä Scratchin käyttömahdollisuudet ovat monipuoliset. Scratch
Perusteet Scratch ohjeita Scratch on graafinen ohjelmointiympäristö koodauksen opetteluun. Se soveltuu hyvin alakouluista yläkouluunkin asti, sillä Scratchin käyttömahdollisuudet ovat monipuoliset. Scratch
Paikkatiedon tulevaisuus
 Paikkatiedon tulevaisuus Yksityismetsätalouden metsänhoitajien vierailu TE:llä 11.10.2007 Juhani Tervo Pääarkkitehti, GIS Iso skaala erilaisia paikkatietojärjestelmiä Paikkatieto tietojärjestelmissä Paikkatietojärjestelmä
Paikkatiedon tulevaisuus Yksityismetsätalouden metsänhoitajien vierailu TE:llä 11.10.2007 Juhani Tervo Pääarkkitehti, GIS Iso skaala erilaisia paikkatietojärjestelmiä Paikkatieto tietojärjestelmissä Paikkatietojärjestelmä
Garmin etrex GPS-laite
 Garmin etrex GPS-laite GPS koulutus 20.6.2007 PAIKKATIETOPAJA -hanke Painikkeet Sisäinen GPS antenni YLÖS näppäin ALAS näppäin PAGE näppäin (Esc) POWER näppäin Ulkoinen virtalähde ja tiedon siirto PC:lle
Garmin etrex GPS-laite GPS koulutus 20.6.2007 PAIKKATIETOPAJA -hanke Painikkeet Sisäinen GPS antenni YLÖS näppäin ALAS näppäin PAGE näppäin (Esc) POWER näppäin Ulkoinen virtalähde ja tiedon siirto PC:lle
YMPÄRISTÖMELUN MITTAUSRAPORTTI
 Ympäristömelu Raportti PR3231 Y01 Sivu 1 (11) Plaana Oy Jorma Hämäläinen Turku 16.8.2014 YMPÄRISTÖMELUN MITTAUSRAPORTTI Mittaus 14.6.2014 Raportin vakuudeksi Jani Kankare Toimitusjohtaja, FM HELSINKI Porvoonkatu
Ympäristömelu Raportti PR3231 Y01 Sivu 1 (11) Plaana Oy Jorma Hämäläinen Turku 16.8.2014 YMPÄRISTÖMELUN MITTAUSRAPORTTI Mittaus 14.6.2014 Raportin vakuudeksi Jani Kankare Toimitusjohtaja, FM HELSINKI Porvoonkatu
FYSP101/K1 KINEMATIIKAN KUVAAJAT
 FYSP101/K1 KINEMATIIKAN KUVAAJAT Työn tavoitteita tutustua kattavasti DataStudio -ohjelmiston käyttöön syventää kinematiikan kuvaajien (paikka, nopeus, kiihtyvyys) hallintaa oppia yhdistämään kinematiikan
FYSP101/K1 KINEMATIIKAN KUVAAJAT Työn tavoitteita tutustua kattavasti DataStudio -ohjelmiston käyttöön syventää kinematiikan kuvaajien (paikka, nopeus, kiihtyvyys) hallintaa oppia yhdistämään kinematiikan
x 5 15 x 25 10x 40 11x x y 36 y sijoitus jompaankumpaan yhtälöön : b)
") MAA4 ratkaisut. 5 a) Itseisarvon vastauksen pitää olla aina positiivinen, joten määritelty kun 5 0 5 5 tai ( ) 5 5 5 5 0 5 5 5 5 0 5 5 0 0 9 5 9 40 5 5 5 5 0 40 5 Jälkimmäinen vastaus ei toimi määrittelyjoukon
MAA4 ratkaisut. 5 a) Itseisarvon vastauksen pitää olla aina positiivinen, joten määritelty kun 5 0 5 5 tai ( ) 5 5 5 5 0 5 5 5 5 0 5 5 0 0 9 5 9 40 5 5 5 5 0 40 5 Jälkimmäinen vastaus ei toimi määrittelyjoukon
Helsingin seitsemäsluokkalaisten matematiikkakilpailu 7.2.2013 Ratkaisuita
 Helsingin seitsemäsluokkalaisten matematiikkakilpailu..013 Ratkaisuita 1. Eräs kirjakauppa myy pokkareita yhdeksällä eurolla kappale, ja siellä on meneillään mainoskampanja, jossa seitsemän sellaista ostettuaan
Helsingin seitsemäsluokkalaisten matematiikkakilpailu..013 Ratkaisuita 1. Eräs kirjakauppa myy pokkareita yhdeksällä eurolla kappale, ja siellä on meneillään mainoskampanja, jossa seitsemän sellaista ostettuaan
Kansallinen maastotietokanta. KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä
 Kansallinen maastotietokanta KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä Projektin selvitys 1 Sisältö 1 YLEISTÄ... 2 1.1 LYHENTEISTÄ JA TERMEISTÄ... 2 2 YLEISTÄ MOBIILIKARTOITUSJÄRJESTELMISTÄ...
Kansallinen maastotietokanta KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä Projektin selvitys 1 Sisältö 1 YLEISTÄ... 2 1.1 LYHENTEISTÄ JA TERMEISTÄ... 2 2 YLEISTÄ MOBIILIKARTOITUSJÄRJESTELMISTÄ...