Magneettilaakerisäädön toteutus dspace+fpga ympäristössä
|
|
|
- Niina Hukkanen
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 LAPPEENRANNAN TEKNILLINEN YLIOPISTO TEKNILLINEN TIEDEKUNTA LUT ENERGIA SÄHKÖTEKNIIKAN OSASTO Magneettilaakerisäädön toteutus dspace+fpga ympäristössä Pekko Jaatinen

2 SISÄLLYSLUETTELO 1 JOHDANTO 4 2 AKTIIVIMAGNEETTILAAKERIT Toimintaperiaate Aktiivimagneettilaakeroinnin hyödyt Esimerkit 6 3 PROJEKTI 7 4 JÄRJESTELMÄ Järjestelmän kuvaus dspace FPGA Servo-ohjain Paikkasensoriohjain 10 5 VAATIMUSMÄÄRITTELY Tavoitteet Kuvaus 11 6 TOIMINNALLINEN MÄÄRITTELY Systeemin käynnistys AMB systeemin identifiointi Kalibrointi 15 7 TEKNINEN MÄÄRITTELY Käytännön toteutus dspace-ympäristössä 17 8 TEKNINEN TOTEUTUS Paikkatiedon lukeminen FPGA:n avulla Debuggaus 19 9 YHTEENVETO 20 LÄHTEET 22

3 AMB DSP FRF VHDL Active magnetic bearing Digital signal prosessor Frequency response function Very high speed integrate circuit hardware description language

4 1 JOHDANTO Työssä tutustutaan aktiivimagneettilaakerijärjestelmän rakenteeseen ja toimintaan, sekä suunnitellaan käyttöliittymän rakennetta. Käyttöliittymään keskitytään tärkeimpien toiminnalliset ominaisuuksien rakenteeseen. Käytännöntoteutus esitellään Simulink/dSpace-ympäristössä. Lopuksi käsitellään paikkatiedon lukeamista FPGApiirin avulla. 2 AKTIIVIMAGNEETTILAAKERIT 2.1 Toimintaperiaate Aktiivimagneettilaakerien toiminta perustuu sähkömagneettien tuottamaan magneettikenttään, jonka avulla roottori saadaan leijumaan ilmassa. Kuva 1 esittää yksinkertaisen toimintamallin yhden vapausasteen tilanteessa. Paikkasensori mittaa roottorin siirtymää halutusta paikasta. Kontrolleri laskee paikkasensorilta saadun tiedon perusteella ohjaussignaalin vahvistimelle, joka vahvistaa sen ohjausvirraksi. Virta muodostaa sähkömagneetissa magneettikentän, joka pyrkii pitämään roottorin halutussa asemassa. (Schweitzer and Maslen,2009). Kuva 1. Yksinkertainen malli laakerin toiminnasta (Schweitzer and Maslen, 2009). 4

5 Käytännön sovelluksissa käytetään yleensä kuvan 2 mukaista radiaalilaakeria. Laakeri koostuu kahdesta sähkömagneetti parista, joita ohjataan differentiaalisesti. Kuva 2. Radiaalilaakerin toimintaperiaate (Lösch, 2002). Tyypillisessä aktiivimagneettilaakerisysteemissä roottoria kannattelee kaksi radiaalilaakeria ja yksi aksiaalilaakeri. Näiden avulla roottoria voidaan ohjata viiden eri vapausasteen suuntaan. Turvalaakerit estävät vahinkojen aiheutumisen roottorille, jos jostain syystä magneettilaakerointi pettää. 5

6 Kuva 3. Tyypillinen aktiivimagneettilaakereilla kannatetun roottorin rakenne (Jastrzebski, 2009). 2.2 Aktiivimagneettilaakeroinnin hyödyt Roottorin pyörimisnopeutta ei rajoita fyysisien laakerien ominaisuudet, joten voidaan roottoria voidaan pyörittää suurilla nopeuksilla. Rajoittava tekijä on roottorin materiaalin vahvuus. Järjestelmä ei tarvitse voitelua, joten sitä voidaan käyttää vaativissa ympäristöissä esimerkiksi tyhjiö, puhdastilat, kaasun käsittely, syövyttävät nesteet ja korkeat lämpötilat (Schweitzer and Maslen, 2009). 2.3 Esimerkit Käyttökohteina ovat erilaiset turbokäytöt, työstökoneet, tyhjiö sekä lääketieteelliset sovellukset. Esimerkkinä turbokäytöistä Man Diesel & Turbo:n valmistama Mopicokompressori järjestelmä kaasuputkille. Kompressori pystyy tuottamaan 150 baarin paineen. Kaasu kulkee kompressorin läpi, joka samalla jäähdyttää moottoria ja magneettilaakereita(man Turbo & Diesel). 6

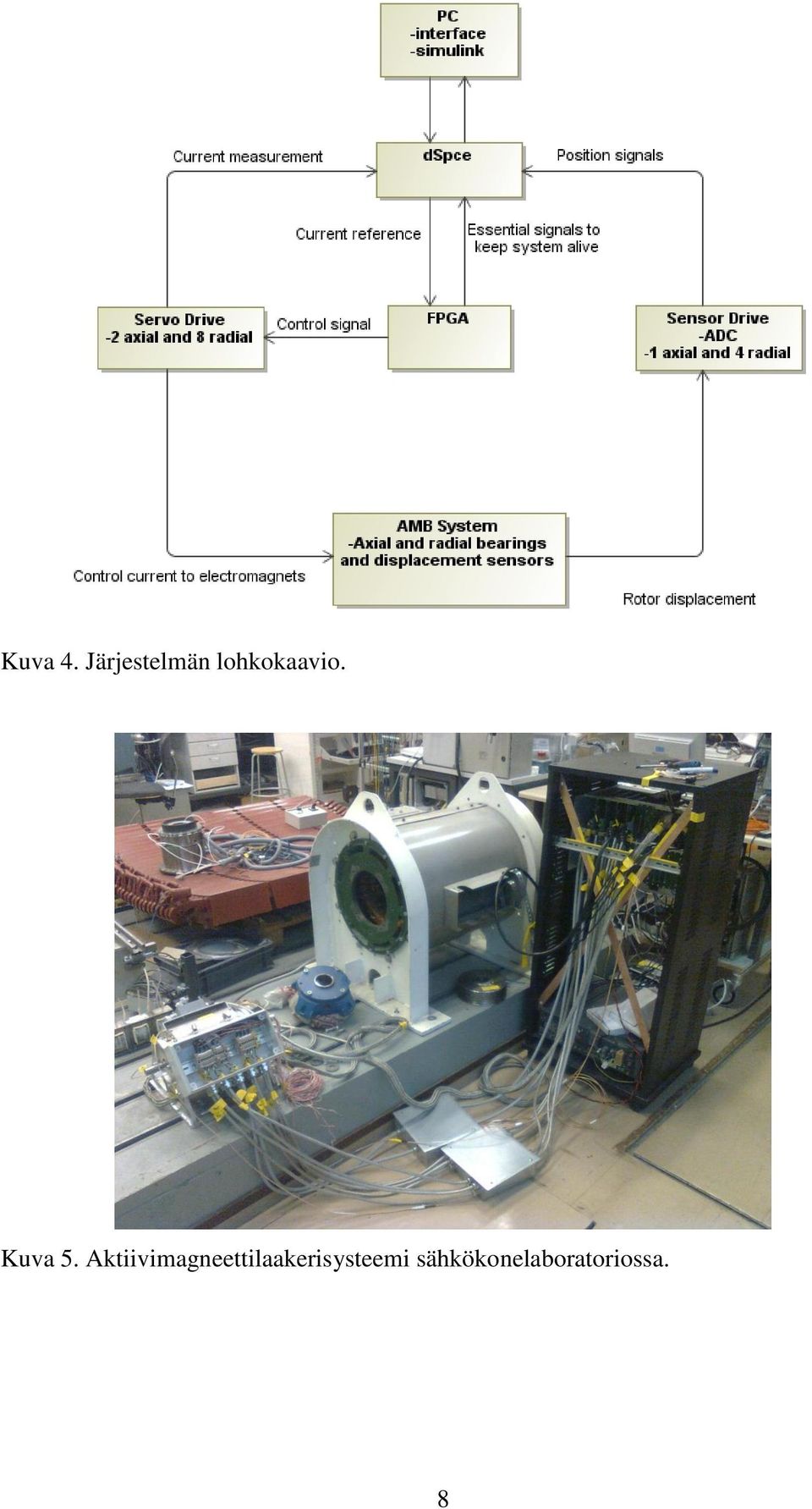
7 3 PROJEKTI Projektin tarkoituksena on toteuttaa suurnopeuspuhallin, joka kykenee toimimaan korkeissa lämpöolosuhteissa (~300 C). Projekti on toteutetaan yhteistyössä Saimaan ammattikorkeakoulun kanssa. Saimia:n vastuualueena on ollut moottorin ja magneettilaakerien mekaaninen suunnittelu ja käytännön toteutus. Yliopisto on toteuttanut sähkö- ja säätötekniset järjestelmät. 4 JÄRJESTELMÄ 4.1 Järjestelmän kuvaus Aktiivimagneettilaakerijärjestelmä koostuu useista eri komponenteista, jotka on liitetty toisiinsa kuvan 4 mukaisesti. Järjestelmän ytimenä toimi dspace, joka suorittaa reaaliaikaisesti Simulink- ohjelmistolla muodostettua säätömallia. DSpace lähettää FPGA-piirille virtaohjeen, jonka perusteella se ohjaa haluttuja servo-ohjaimia. Servoohjaimet syöttävät virtaa sähkömagneeteille, joiden muodostamien magneettikenttien avulla roottori saadaan leijumaan. Roottorin asento saadaan selville pyörrevirta-anturien avulla, joiden mittausten perusteella säätäjä pystyy pitämään roottorin halutussa asennossa. 7


8 Kuva 4. Järjestelmän lohkokaavio. Kuva 5. Aktiivimagneettilaakerisysteemi sähkökonelaboratoriossa. 8
9 4.2 dspace DSpace-järjestelmä koostuu prosessorikortista ja liitäntäkorteista (kuva 6). Prosessorikortti DS1005 sisältää 800 MHz PowerPC-prosessorin. Digitaalisen tiedonsiirtoon dspace:ssa on kaksi kappaletta DS4003 digitaalista I/O-korttia. Analogisen tiedon vastaanottamiseen järjestelmässä on neljä kappaletta DS2001 ADCkorttia. Tiedonsiirto tietokoneen ja dspace:n väillä tapahtuu valokuitua pitkin. ControlDesk-ohjelmalla voidaan muodostaa käyttöliittymä suoritettavalle Simulinkmallille. Kuva 6. Kuvassa näkyy dspace:n räkkikotelo, jossa sijaitsevat prossori- ja liitäntäkortit. 4.3 FPGA FPGA- ohjausalustana käytetään Lappeenrannan teknillisen yliopiston elektroniikan suunnittelukeskuksen tekemää DSP-FPGA-alustaa (Kuva 7). Alusta koostuu Virtex-4 FPGA- piiristä sekä TMS320C6727 ja TMS320F2806 digitaalisista signaaliprosessoreista. Tällä hetkellä käytössä on ainoastaan Virtex-4 FPGA- piiri, jota käytetään servo-ohjainten ohjaamiseen (Salli, 2009). 9


10 Kuva 7. DSP-FPGA-alustan lohkokaavio (Salli, 2009). 4.4 Servo-ohjain Järjestelmä sisältää viisi kappaletta servo-ohjainkortteja. Jokaisessa kortissa on kaksi kappaletta Advanced Motion Controls:n valmistamia 10A8 PWM servo-ohjaimia. Ohjaimen ulostulojännite on 20-80V ja se kykenee syöttämään jatkuvaa virtaa 6A. Kytkentätaajuus on 33kHz (AMC). 4.5 Paikkasensoriohjain Paikkasensoreina käytetään SKF:n valmistamia CMSS 65 pyörrevirta-antureita. Kyseiset anturit tarvitsevat toimiakseen SKF CMSS 665 ohjaimet. Järjestelmä sisältää kaksi paikkasensoriohjainkorttia joissa on paikat kahdeksalle ohjainyksikölle. Tällä hetkellä 7 yksikköä on käytössä. 10

11 5 VAATIMUSMÄÄRITTELY 5.1 Tavoitteet Suunnitella käyttöliittymä joka sisältää automatisoituja ohjaus-,testaus- sekä tiedonkeruutoimintoja, jotka helpottavat tutkimuksen tekemistä. Selkeä ja informatiivinen käyttöliittymä antaa paremman kuvan järjestelmän toiminnasta, jota voidaan hyödyntää esimerkiksi näytettäessä järjestelmän toimintaa opiskelijoille tai muille vieraille. 5.2 Kuvaus Käyttäjä pystyy käyttöliittymän avulla käynnistämään ja sammuttamaan järjestelmän. Käynnissä olevalle järjestelmälle voidaan suorittaa identifiointi taajuusvastefunktion avulla. Voidaan suorittaa kalibrointi ja diagnostiikka toimintoja, joista tallennettava tieto on luettavissa jälkeenpäin. Kuva 8. Käyttöliittymän toimintoja. 11

12 6 TOIMINNALLINEN MÄÄRITTELY 6.1 Systeemin käynnistys Systeemi käynnistetään painikkeesta, jonka jälkeen testataan systeemin käyttökunto. Jos havaitaan jokin vika tehdään vikailmoitus ja lopetetaan systeemin käyttö. Käynnistysparametrit valitaan manuaalisesti tai tiedostosta. Parametrit sisältävät muun muassa taajuusmuuttajan nopeusohjeen. Ohjelma tutkii löytyykö aikaisemmin tallennettuja kalibrointitietoja. Jos tietoja ei löydy suoritetaan kalibrointi. Kalibroinnin voi suorittaa halutessaan uudestaan. Kun roottori leijuu voidaan käynnistää moottori tai sammuttaa järjestelmä. Käynnistäminen tapahtuu nappia painamalla jolloin lähetetään käsky taajuusmuuttajalle, joka aloittaa pyörittämään moottoria. Jos roottori tippuu turvalaakerien varaan pysäytetään roottorin pyörittäminen ja tehdään vikailmoitus sekä ajetaan järjestelmä alas. Kuva 9. Systeemin käynnistyksen ja sammutuksen tilakone. 12

13 6.2 AMB systeemin identifiointi Käytettäessä mallipohjaista säätöä vaaditaan vakaaseen toimintaa tarkka systeemimalli. Kaikkia dynaamisia ominaisuuksia on hyvin vaikea analyyttisesti mallintaa, joten mallin muodostamiseen käytetään kokeellista identifiointia taajuusvastefunktion avulla (Hynynen, 2011) Taajuusvastefunktio Taajuusvastefunktiota (FRF) käytetään värähtely- ja moodianalyysiin. Moodianalyysillä selvitetään mitattavan rakenteen dynaamiset ominaisuudet eli ominaistaajuudet, värähtelymuodot ja muotojen vaimennussuhteet. Taajuusvastefunktiomalli muodostetaan yksinkertaisesti syöttämällä systeemin sisääntuloon herätesignaali ja mittaamalla systeemin ulostulo. Mitattujen sisään ja ulostulojen perusteella voidaan muodostaa systeemin malli (Suuronen 2011) Identifiointi monitaajuusherätteellä Monitaajuinen herätesignaali sisältää useita sinisignaaleja ja sitä kutsutaan multisineherätteeksi. Monitaajuisen herätteen etuna on lyhyempi mittausaika verrattuna askelherätteeseen. Herätesignaalin taajuudet ja amplitudit pyritään valitsemaan siten, että systeemin muodostamat harmoniset signaalit eivät vääristä tulosta (Hynynen, 2011). Systeemin identifiointi tapahtuu syöttämällä herätesignaali kontrollivirran sekaan ja mittaamalla roottorin paikan muutos (Kuva 10). Mitattujen sisään- ja ulostulojen perusteella muodostetaan systeemin malli. 13

14 Kuva 10. Herätesignaalin syöttäminen systeemiin. Identifiointia voidaan käyttää myös käytönaikaiseen kunnonvalvontaan. Tällä voidaan havaita esimerkiksi roottorin rakenteellinen vika. Tämän perusteella voidaan tehdä tarvittavat kunnossapito toimenpiteet ennen kuin vika ilmenee käytännössä Identifioin toteutuksen kuvaus Identifiointi käynnistetään painikkeesta, jonka jälkeen valitaan parametrit tiedostosta tai määritellään manuaalisesti. Manuaalisesti valittaessa määritellään haluttu taajuusalue, jonka jälkeen ohjelma laskee herätesignaaleille sopivat amplitudien arvot. Kuva 11. Identifioinnin suorittaminen monitaajuusherätteellä. 14

15 Vaihtoehtoisesti parametrit voidaan valita tiedostosta. Parametrien asetuksen jälkeen syötetään herätesignaali systeemiin ja mitataan sisään- sekä ulostulot. Mittausarvot tallennetaan tiedostoon, jonka jälkeen niille voidaan tehdä haluttu jatkokäsittely. 6.3 Kalibrointi Roottorin geometrisen- ja magneettisenkeskipisteen kalibroiminen manuaalisesti on aikaa vievää ja altis virheille. Geometristä keskipistettä tarvitaan massakeskipistekompensaattoriin. Geometrisen keskipisteen määrittäminen tapahtuu syöttämällä virtaa jokaiseen sähkömagneettiin peräjälkeen ja mittaamalla koordinaatit. Lisäksi virtaa ajetaan sähkömagneeteille niin, että saadaan roottorin paikka kunkin sähkömagneetin välistä. Saatujen koodinaattien perusteella voidaan laskea geometrinen keskipiste (Kuva 12). Kuva 12. Geometrisen keskipisteen määrittäminen. 15

16 Magneettinen keskipiste on optimaalinen toimintapiste roottorin leijuttamiseen. Tämä piste löydetään kun akselien X ja Y offset-arvoista saadaan laskettua nollat. Kuva 13. Magneettisen keskipisteen määrittäminen. Magneettinen keskipiste määritetään syöttämällä eri suuruisia bias-virtoja eri akselien suuntaan ja mittaamalla kontrollivirrat (Kuva 13). Bias- ja kontrollivirtojen, ilmavälin, permeabiliteetin sekä arvioidun vuon kulkureitin avulla voidaan laskea akselien offsetarvot. Jotta löydetään roottorin oikea toimintapiste joudutaan tekemään useita iteraatioita. (Prins, 2007) 16


17 7 TEKNINEN MÄÄRITTELY 7.1 Käytännön toteutus dspace-ympäristössä Käyttöliittymä voidaan toteuttaa samassa Matlab/Simulink-ympäristössä kuten magneettilaakerien säätömalli. Ohjelmointi toteutetaan Simulink:in eri blokkeja käyttäen. Eräs toteutuksen kannalta hyödyllinen blokki on Embedded MATTLAB Function. Kyseisellä blokilla voidaan tarvittavia Matlab-kielisiä laskutoimituksia lisätä Simulink-ympäristöön ja sitä kautta reaaliaikaprosessorille(quijano, 2002). Simulinkmallin ja dspace:n isään- ja ulostulojen rajapintana toimi dspace:n RTI (Real-time interface) blokkivalikoima(kuva 14). Kuva 14. Esimerkki A/D-muuntimen RTI-blokista. ControlDesk-ohjelman avulla Simulink-mallista muodostetaan c-kielinen koodi, joka käännetään suoritettavaksi tiedostoksi dspace-kortin prossorille. Kyseisellä ohjelmalla voidaan tehdä graafinen käyttöliittymä raahaa ja pudota menetelmällä. 17
 blokkivalikoima(kuva 14). Kuva 14. Esimerkki A/D-muuntimen RTI-blokista.")

18 Kuva 15. ControlDesk:in graafisen käyttöliittymän rakennuskomponentteja. Kun käyttöliittymän ulkoasu on muodostettu halutun laiseksi voidaan mikä tahansa Simulin-mallin muuttuja linkittää käyttöliittymän toiminnalliseen objektiin. Tällä tavalla voidaan sijoittaa eri mittaustietoja graafisiin mittareihin, jotka helpottavat tiedon lukua. 8 TEKNINEN TOTEUTUS 8.1 Paikkatiedon lukeminen FPGA:n avulla Tällä hetkellä roottorin paikkatieto kulkee sensoriohjaimelta suoraan dspace:n ADCkorttiin. Kortilla muunnetaan analoginen paikkatieto digitaaliseksi. Digitaalinen paikkatieto skaalataan Simulik:in avulla mikrometreiksi. Integraation lisäämiseksi ja dspace:n sisääntulojen vapauttamiseksi muuhun käyttöön voidaan paikkatieto lukea 18

19 ohjaimelta FPGA-piirin avulla. DSP-FPGA-alustan pohjakortti sisältää kaksi kappaletta kuusi kanavaista LTC ADC-piiriä. ADC-piireillä muutetaan paikkatieto digitaaliseksi, joka luetaan FPGA-piirillä ja lähetetään dspace:n digitaalisiin tuloihin. FPGA:lle on valmiiksi kirjoitettu VHDL-kielinen ohjelma paikkatiedon lukemista ja lähettämistä varten. Ongelmana on, että paikkatieto ei saavu selväkielisenä ControlDesk:ille asti. Kuva 16. Tiedonkulku paikka-anturilta dspacelle. 8.2 Debuggaus Vian selvittäminen aloitettiin simuloimalla VHDL-koodia Xilinx ISE-ohjelman ISimsimulaattorilla. Simuloinnissa vertailtiin A/D-muuntimelta saatavaa ja dspace:lle menevää dataa. Kuvia 17 ja 18 vertailemalla voidaan havaita, että bitit ovat päinvastaisessa järjestyksessä. Bittien järjestyksen kääntö tapahtuu helposti, mutta tulee huomata dspace:lle menevän datan kanavissa kaksi ja neljä jakautuvan kolmen eri 32- bittisen ulostulon kesken. Kyseisten kanavien bitit tulee kääntää manuaalisesti oikein päin. 19

20 Kuva 17. A/D-muuntimen ulostulo. Kuva 18. dspace:lle menevä paikkatieto. Paikkatietoa vastaanottavaa Simulink-mallia testattiin syöttämällä siihen dspce:lta tulevat oikeinpäin käännetyt bittijonot. Malli erottelee 14-bitin paikkatiedot 32-bitin tuloista ja muuntaa ne 16-bitin kokonaisluvuiksi. Muuntamalla syötettyjen kanavien bittijonot kokonaisluvuiksi ja vertaamalla niitä Simulink-mallin ulostuloihin voitiin havaita, että syötetty ja ulostuleva paikkatieto täsmää. 9 YHTEENVETO Työssä käsiteltiin Lappeenrannan teknillisen yliopiston, sekä Saimaan ammattikorkeakoulun yhteistyössä tekemää aktiivimagneettijärjestelmää. Järjestelmä nopeamman käytettävyyden parantamiseksi esiteltiin käyttöliittymän automaattisia toimintoja suorittavia osia. Tehtäessä käyttöliittymää tulisi kiinnittää huomiota käyttöliittymän selkeään ulkoasuun. 20

21 Simulink- ja dspace-ympäristö soveltuu kehitysasteella olevan järjestelmän tutkimiseen helppokäyttöisyyden ja nopean muokattavuuden ansiosta. 21
22 LÄHTEET Schweitzer, G. and Maslen, E.H. 2009, Magnetic Bearings, Theory, Design, and Application to Rotating Machinery, Springer. Lösch, F. 2002, Identification and automated controller design for active magnetic bearing sytems Salli, J. 2009, Rtos framework for real-time control system Suuronen, A. 2011, Moodianalyysilaitteiston kartoitus ja käyttöönottotuulivoimageneraattoreita valmistavassa yrityksessä AMC, Luettu: ControlDesk, Luettu: Prins, R. 2007, A System identification technique using bias current perturbation for determining the effective rotor origin of active magnetic bearings Hynynen, K. 2011, Broadband excitation in the system identification of active magnetic bearing rotor systems Shapovalov, N. 2011, Methodology for an AMB system commissioning Jastrzebski, R. 2007, Desing and implementation of FPGA-based LQ control of active magnetic bearings Quijano, N. 2002, A tutorial introductio to Control systems development adn implementation with dspace Man Turbo & Diesel, Luettu:
S-108.3020 Elektroniikan häiriökysymykset. Laboratoriotyö, kevät 2010
 1/7 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö, kevät 2010 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä Viimeksi päivitetty 25.2.2010 / MO 2/7 Johdanto Sähköisiä
1/7 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö, kevät 2010 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä Viimeksi päivitetty 25.2.2010 / MO 2/7 Johdanto Sähköisiä
Kojemeteorologia. Sami Haapanala syksy 2013. Fysiikan laitos, Ilmakehätieteiden osasto
 Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Kojemeteorologia, 3 op 9 luentoa, 3 laskuharjoitukset ja vierailu mittausasemalle Tentti Oppikirjana Rinne & Haapanala:
Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Kojemeteorologia, 3 op 9 luentoa, 3 laskuharjoitukset ja vierailu mittausasemalle Tentti Oppikirjana Rinne & Haapanala:
Ohjelmistoradio. Mikä se on:
 1 Mikä se on: SDR = Software Defined Radio radio, jossa ohjelmisto määrittelee toiminnot ja ominaisuudet: otaajuusalue olähetelajit (modulaatio) olähetysteho etuna joustavuus, jota tarvitaan sovelluksissa,
1 Mikä se on: SDR = Software Defined Radio radio, jossa ohjelmisto määrittelee toiminnot ja ominaisuudet: otaajuusalue olähetelajit (modulaatio) olähetysteho etuna joustavuus, jota tarvitaan sovelluksissa,
S-108.3020. Elektroniikan häiriökysymykset. Laboratoriotyö 1
 1/8 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö 1 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä 13.9.2007 TJ 2/8 3/8 Johdanto Sähköisiä häiriöitä on kaikkialla ja
1/8 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö 1 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä 13.9.2007 TJ 2/8 3/8 Johdanto Sähköisiä häiriöitä on kaikkialla ja
Tiedonkeruu ja analysointi
 Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat laakerit,
Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat laakerit,
Kojemeteorologia. Sami Haapanala syksy 2013. Fysiikan laitos, Ilmakehätieteiden osasto
 Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Datan käsittely ja tallentaminen Käytännössä kaikkien mittalaitteiden ensisijainen signaali on analoginen Jotta tämä
Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Datan käsittely ja tallentaminen Käytännössä kaikkien mittalaitteiden ensisijainen signaali on analoginen Jotta tämä
- Käyttäjä voi valita halutun sisääntulon signaalin asetusvalikosta (esim. 0 5V, 0 10 V tai 4 20 ma)
") LE PDX DIN kiskokiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 4 numeroinen LED näyttö - Selkeä rakenne, yksinkertainen käyttää
LE PDX DIN kiskokiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 4 numeroinen LED näyttö - Selkeä rakenne, yksinkertainen käyttää
Tiedonkeruu ja analysointi
 Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala 30.9.2015 ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat
Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala 30.9.2015 ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat
- Käyttäjä voi valita halutun sisääntulon signaalin asetusvalikosta (esim. 0 5V, 0 10 V tai 4 20 ma)
") LE PSX DIN kisko kiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 3 numeron LED näyttö - Selkeä rakenne, yksinkertainen käyttää
LE PSX DIN kisko kiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 3 numeron LED näyttö - Selkeä rakenne, yksinkertainen käyttää
SÄHKÖKÄYTÖN EMULOINTI SIMULINK-DSPACE-M1 -YMPÄRISTÖSSÄ
 Sillanpää Teemu SÄHKÖKÄYTÖN EMULOINTI SIMULINK-DSPACE-M1 -YMPÄRISTÖSSÄ Seminaarityön loppuraportti, joka on jätetty tarkastettavaksi kurssin Sulautettujen järjestelmien seminaarikurssi osasuorituksena.
Sillanpää Teemu SÄHKÖKÄYTÖN EMULOINTI SIMULINK-DSPACE-M1 -YMPÄRISTÖSSÄ Seminaarityön loppuraportti, joka on jätetty tarkastettavaksi kurssin Sulautettujen järjestelmien seminaarikurssi osasuorituksena.
S11-09 Control System for an. Autonomous Household Robot Platform
 S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
DCU RM1 VAL0100517 / SKC9103180 DISPLAY AND CONTROL UNIT RMS-MITTAUSJÄRJESTELMÄLLE KÄSIKIRJA. DCU-RM1 FI.docx 2001-11-02 / BL 1(9) metso
 metso") DCU RM1 VAL0100517 / SKC9103180 DISPLAY AND CONTROL UNIT RMS-MITTAUSJÄRJESTELMÄLLE KÄSIKIRJA metso FI.docx 2001-11-02 / BL 1(9) SISÄLTÖ 1. KOMPONENTTIEN SIJAINTI 2. KUVAUS 3. TEKNISET TIEDOT 5. ASETUS
DCU RM1 VAL0100517 / SKC9103180 DISPLAY AND CONTROL UNIT RMS-MITTAUSJÄRJESTELMÄLLE KÄSIKIRJA metso FI.docx 2001-11-02 / BL 1(9) SISÄLTÖ 1. KOMPONENTTIEN SIJAINTI 2. KUVAUS 3. TEKNISET TIEDOT 5. ASETUS
TIEP114 Tietokoneen rakenne ja arkkitehtuuri, 3 op. FT Ari Viinikainen
 TIEP114 Tietokoneen rakenne ja arkkitehtuuri, 3 op FT Ari Viinikainen Tietokoneen rakenne Keskusyksikkö, CPU Keskusmuisti Aritmeettislooginen yksikkö I/O-laitteet Kontrolliyksikkö Tyypillinen Von Neumann
TIEP114 Tietokoneen rakenne ja arkkitehtuuri, 3 op FT Ari Viinikainen Tietokoneen rakenne Keskusyksikkö, CPU Keskusmuisti Aritmeettislooginen yksikkö I/O-laitteet Kontrolliyksikkö Tyypillinen Von Neumann
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
RockID-varastonhallintajärjestelmän käyttöohje. v. 1.0
 RockID-varastonhallintajärjestelmän käyttöohje v. 1.0 Yleistä Rockstar lukijakäyttöliittymä Tuotteiden lukeminen lähtevään tilaukseen Tilaukseen kuulumattomat tuotteet Tuotteiden lukeminen tilauksesta
RockID-varastonhallintajärjestelmän käyttöohje v. 1.0 Yleistä Rockstar lukijakäyttöliittymä Tuotteiden lukeminen lähtevään tilaukseen Tilaukseen kuulumattomat tuotteet Tuotteiden lukeminen tilauksesta
FYSP105 / K3 RC-SUODATTIMET
 FYSP105 / K3 R-SODATTIMET Työn tavoitteita tutustua R-suodattimien toimintaan oppia mitoittamaan tutkittava kytkentä laiterajoitusten mukaisesti kerrata oskilloskoopin käyttöä vaihtosähkömittauksissa Työssä
FYSP105 / K3 R-SODATTIMET Työn tavoitteita tutustua R-suodattimien toimintaan oppia mitoittamaan tutkittava kytkentä laiterajoitusten mukaisesti kerrata oskilloskoopin käyttöä vaihtosähkömittauksissa Työssä
Tekniikka ja liikenne (5) Tietoliikennetekniikan laboratorio
 Tietoliikennetekniikan laboratorio") Tekniikka ja liikenne 4.4.2011 1 (5) Tietoliikennetekniikan laboratorio Työ 1 PCM-työ Työn tarkoitus Työssä tutustutaan pulssikoodimodulaation tekniseen toteutustapaan. Samalla nähdään, miten A/Dmuunnin
Tekniikka ja liikenne 4.4.2011 1 (5) Tietoliikennetekniikan laboratorio Työ 1 PCM-työ Työn tarkoitus Työssä tutustutaan pulssikoodimodulaation tekniseen toteutustapaan. Samalla nähdään, miten A/Dmuunnin
Oikeanlaisten virtapihtien valinta Aloita vastaamalla seuraaviin kysymyksiin löytääksesi oikeantyyppiset virtapihdit haluamaasi käyttökohteeseen.
 Oikeanlaisten virtapihtien valinta Aloita vastaamalla seuraaviin kysymyksiin löytääksesi oikeantyyppiset virtapihdit haluamaasi käyttökohteeseen. 1. Tuletko mittaamaan AC tai DC -virtaa? (DC -pihdit luokitellaan
Oikeanlaisten virtapihtien valinta Aloita vastaamalla seuraaviin kysymyksiin löytääksesi oikeantyyppiset virtapihdit haluamaasi käyttökohteeseen. 1. Tuletko mittaamaan AC tai DC -virtaa? (DC -pihdit luokitellaan
83950 Tietoliikennetekniikan työkurssi Monitorointivastaanottimen perusmittaukset
 TAMPEREEN TEKNILLINEN KORKEAKOULU 83950 Tietoliikennetekniikan työkurssi Monitorointivastaanottimen perusmittaukset email: ari.asp@tut.fi Huone: TG 212 puh 3115 3811 1. ESISELOSTUS Vastaanottimen yleisiä
TAMPEREEN TEKNILLINEN KORKEAKOULU 83950 Tietoliikennetekniikan työkurssi Monitorointivastaanottimen perusmittaukset email: ari.asp@tut.fi Huone: TG 212 puh 3115 3811 1. ESISELOSTUS Vastaanottimen yleisiä
VHDL/Verilog/SystemC. Jukka Jokelainen 20.10.2009
 VHDL/Verilog/SystemC Jukka Jokelainen 20.10.2009 Sisältö Mitä ihmettä on hardwaren ohjelmointi? VHDL Verilog SystemC Analogiaelektroniikan yhdistäminen digitaaliseen maailmaan Yhteenveto ja pohdintaa Hardwaren
VHDL/Verilog/SystemC Jukka Jokelainen 20.10.2009 Sisältö Mitä ihmettä on hardwaren ohjelmointi? VHDL Verilog SystemC Analogiaelektroniikan yhdistäminen digitaaliseen maailmaan Yhteenveto ja pohdintaa Hardwaren
VIM RM1 VAL0123136 / SKC9068201 VIBRATION MONITOR RMS-MITTAUSJÄRJESTELMÄLLE KÄSIKIRJA. VIM-RM1 FI.docx 1998-06-04 / BL 1(5)
") VIM RM1 VAL0123136 / SKC9068201 VIBRATION MONITOR RMS-MITTAUSJÄRJESTELMÄLLE KÄSIKIRJA FI.docx 1998-06-04 / BL 1(5) SISÄLTÖ 1. KOMPONENTTIEN SIJAINTI 2. TOIMINNAN KUVAUS 3. TEKNISET TIEDOT 4. SÄÄTÖ 5. KALIBROINTI
VIM RM1 VAL0123136 / SKC9068201 VIBRATION MONITOR RMS-MITTAUSJÄRJESTELMÄLLE KÄSIKIRJA FI.docx 1998-06-04 / BL 1(5) SISÄLTÖ 1. KOMPONENTTIEN SIJAINTI 2. TOIMINNAN KUVAUS 3. TEKNISET TIEDOT 4. SÄÄTÖ 5. KALIBROINTI
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA. Jouko Esko n85748 Juho Jaakkola n86633. Dynaaminen Kenttäteoria GENERAATTORI.
 VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Jouko Esko n85748 Juho Jaakkola n86633 Dynaaminen Kenttäteoria GENERAATTORI Sivumäärä: 10 Jätetty tarkastettavaksi: 06.03.2008 Työn tarkastaja Maarit
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Jouko Esko n85748 Juho Jaakkola n86633 Dynaaminen Kenttäteoria GENERAATTORI Sivumäärä: 10 Jätetty tarkastettavaksi: 06.03.2008 Työn tarkastaja Maarit
KÄYTTÖOHJE LÄMPÖTILA-ANEMOMETRI DT-619
 KÄYTTÖOHJE LÄMPÖTILA-ANEMOMETRI DT-619 2007 S&A MATINTUPA 1. ILMAVIRTAUKSEN MITTAUS Suora, 1:n pisteen mittaus a) Kytke mittalaitteeseen virta. b) Paina UNITS - näppäintä ja valitse haluttu mittayksikkö
KÄYTTÖOHJE LÄMPÖTILA-ANEMOMETRI DT-619 2007 S&A MATINTUPA 1. ILMAVIRTAUKSEN MITTAUS Suora, 1:n pisteen mittaus a) Kytke mittalaitteeseen virta. b) Paina UNITS - näppäintä ja valitse haluttu mittayksikkö
Flash AD-muunnin. Ominaisuudet. +nopea -> voidaan käyttää korkeataajuuksisen signaalin muuntamiseen (GHz) +yksinkertainen
 +yksinkertainen") Flash AD-muunnin Koostuu vastusverkosta ja komparaattoreista. Komparaattorit vertailevat vastuksien jännitteitä referenssiin. Tilanteesta riippuen kompraattori antaa ykkösen tai nollan ja näistä kootaan
Flash AD-muunnin Koostuu vastusverkosta ja komparaattoreista. Komparaattorit vertailevat vastuksien jännitteitä referenssiin. Tilanteesta riippuen kompraattori antaa ykkösen tai nollan ja näistä kootaan
Väliraportti: Vesipistekohtainen veden kulutuksen seuranta, syksy Mikko Kyllönen Matti Marttinen Vili Tuomisaari
 Väliraportti: Vesipistekohtainen veden kulutuksen seuranta, syksy 2015 Mikko Kyllönen Matti Marttinen Vili Tuomisaari Projektin eteneminen Projekti on edennyt syksyn aikana melko vaikeasti. Aikataulujen
Väliraportti: Vesipistekohtainen veden kulutuksen seuranta, syksy 2015 Mikko Kyllönen Matti Marttinen Vili Tuomisaari Projektin eteneminen Projekti on edennyt syksyn aikana melko vaikeasti. Aikataulujen
Signaalien datamuunnokset
 Signaalien datamuunnokset Datamuunnosten teoriaa Muunnosten taustaa Muunnosten teoriaa Muunnosten rajoituksia ja ongelmia Petri Kärhä 06/02/2004 Luento 4a: Signaalien datamuunnokset 1 Digitaalitekniikan
Signaalien datamuunnokset Datamuunnosten teoriaa Muunnosten taustaa Muunnosten teoriaa Muunnosten rajoituksia ja ongelmia Petri Kärhä 06/02/2004 Luento 4a: Signaalien datamuunnokset 1 Digitaalitekniikan
Signaalien datamuunnokset. Digitaalitekniikan edut
 Signaalien datamuunnokset Datamuunnosten teoriaa Muunnosten taustaa Muunnosten teoriaa Muunnosten rajoituksia ja ongelmia Petri Kärhä 09/02/2009 Signaalien datamuunnokset 1 Digitaalitekniikan edut Tarkoituksena
Signaalien datamuunnokset Datamuunnosten teoriaa Muunnosten taustaa Muunnosten teoriaa Muunnosten rajoituksia ja ongelmia Petri Kärhä 09/02/2009 Signaalien datamuunnokset 1 Digitaalitekniikan edut Tarkoituksena
Koesuunnitelma. ViDRoM Virtual Design of Rotating Machines. Raine Viitala
 Koesuunnitelma ViDRoM Virtual Design of Rotating Machines Raine Viitala ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat laakerit, kolmikulmaiset
Koesuunnitelma ViDRoM Virtual Design of Rotating Machines Raine Viitala ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat laakerit, kolmikulmaiset
DIODIN OMINAISKÄYRÄ TRANSISTORIN OMINAISKÄYRÄSTÖ
 1 IOIN OMINAISKÄYRÄ JA TRANSISTORIN OMINAISKÄYRÄSTÖ MOTIVOINTI Työ opettaa mittaamaan erityyppisten diodien ominaiskäyrät käyttämällä oskilloskooppia XYpiirturina Työssä opetellaan mittaamaan transistorin
1 IOIN OMINAISKÄYRÄ JA TRANSISTORIN OMINAISKÄYRÄSTÖ MOTIVOINTI Työ opettaa mittaamaan erityyppisten diodien ominaiskäyrät käyttämällä oskilloskooppia XYpiirturina Työssä opetellaan mittaamaan transistorin
Laskuharjoitus 9, tehtävä 6
 Aalto-yliopiston perustieteiden korkeakoulu Jouni Pousi Systeemianalyysin laboratorio Mat-2.4129 Systeemien identifiointi Laskuharjoitus 9, tehtävä 6 Tämä ohje sisältää vaihtoehtoisen tavan laskuharjoituksen
Aalto-yliopiston perustieteiden korkeakoulu Jouni Pousi Systeemianalyysin laboratorio Mat-2.4129 Systeemien identifiointi Laskuharjoitus 9, tehtävä 6 Tämä ohje sisältää vaihtoehtoisen tavan laskuharjoituksen
Operaatiovahvistimen vahvistus voidaan säätää halutun suuruiseksi käyttämällä takaisinkytkentävastusta.
 TYÖ 11. Operaatiovahvistin Operaatiovahvistin on mikropiiri ( koostuu useista transistoreista, vastuksista ja kondensaattoreista juotettuna pienelle piipalaselle ), jota voidaan käyttää useisiin eri kytkentöihin.
TYÖ 11. Operaatiovahvistin Operaatiovahvistin on mikropiiri ( koostuu useista transistoreista, vastuksista ja kondensaattoreista juotettuna pienelle piipalaselle ), jota voidaan käyttää useisiin eri kytkentöihin.
Ch4 NMR Spectrometer
 Ch4 NMR Spectrometer Tässä luvussa esitellään yleistajuisesti NMR spektrometrin tärkeimmät osat NMR-signaalin mittaaminen edellyttää spektrometriltä suurta herkkyyttä (kykyä mitata hyvin heikko SM-signaali
Ch4 NMR Spectrometer Tässä luvussa esitellään yleistajuisesti NMR spektrometrin tärkeimmät osat NMR-signaalin mittaaminen edellyttää spektrometriltä suurta herkkyyttä (kykyä mitata hyvin heikko SM-signaali
Nimi: Muiden ryhmäläisten nimet:
 Nimi: Muiden ryhmäläisten nimet: PALKKIANTURI Työssä tutustutaan palkkianturin toimintaan ja havainnollistetaan sen avulla pienten ainepitoisuuksien havainnointia. Työn mittaukset on jaettu kolmeen osaan,
Nimi: Muiden ryhmäläisten nimet: PALKKIANTURI Työssä tutustutaan palkkianturin toimintaan ja havainnollistetaan sen avulla pienten ainepitoisuuksien havainnointia. Työn mittaukset on jaettu kolmeen osaan,
TIES530 TIES530. Moniprosessorijärjestelmät. Moniprosessorijärjestelmät. Miksi moniprosessorijärjestelmä?
 Miksi moniprosessorijärjestelmä? Laskentaa voidaan hajauttaa useammille prosessoreille nopeuden, modulaarisuuden ja luotettavuuden vaatimuksesta tai hajauttaminen voi helpottaa ohjelmointia. Voi olla järkevää
Miksi moniprosessorijärjestelmä? Laskentaa voidaan hajauttaa useammille prosessoreille nopeuden, modulaarisuuden ja luotettavuuden vaatimuksesta tai hajauttaminen voi helpottaa ohjelmointia. Voi olla järkevää
Teknillinen korkeakoulu T Tietojenkäsittelyopin ohjelmatyö. Testitapaukset - Siirtoprotokolla
 Testitapaukset - Siirtoprotokolla Sisällysluettelo 1. Johdanto...3 2. Testattava järjestelmä...4 3. Testitapaukset...5 3.1 Ohjelma-ajan lukeminen...5 3.2 Koordinaattidatan lukeminen...5 3.3 Lähetysajan
Testitapaukset - Siirtoprotokolla Sisällysluettelo 1. Johdanto...3 2. Testattava järjestelmä...4 3. Testitapaukset...5 3.1 Ohjelma-ajan lukeminen...5 3.2 Koordinaattidatan lukeminen...5 3.3 Lähetysajan
Ilmanvirtauksen mittarit
 Swema 3000 yleismittari/monitoimimittari sisäilmastomittauksiin Ilmastoinnin yleismittari, Vahva metallirunkoinen Swema 3000 on suunniteltu ilmastoinnin, sisäilmaston ja olosuhdemittausten tarpeisiin erityisesti
Swema 3000 yleismittari/monitoimimittari sisäilmastomittauksiin Ilmastoinnin yleismittari, Vahva metallirunkoinen Swema 3000 on suunniteltu ilmastoinnin, sisäilmaston ja olosuhdemittausten tarpeisiin erityisesti
DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä
 1 DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä JK 23.10.2007 Johdanto Harrasteroboteissa käytetään useimmiten voimanlähteenä DC-moottoria. Tämä moottorityyppi on monessa suhteessa kätevä
1 DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä JK 23.10.2007 Johdanto Harrasteroboteissa käytetään useimmiten voimanlähteenä DC-moottoria. Tämä moottorityyppi on monessa suhteessa kätevä
Supply jännite: Ei kuormaa Tuuletin Vastus Molemmat DC AC Taajuus/taajuudet
 S-108.3020 Elektroniikan häiriökysymykset 1/5 Ryhmän nro: Nimet/op.nro: Tarvittavat mittalaitteet: - Oskilloskooppi - Yleismittari, 2 kpl - Ohjaus- ja etäyksiköt Huom. Arvot mitataan pääasiassa lämmityksen
S-108.3020 Elektroniikan häiriökysymykset 1/5 Ryhmän nro: Nimet/op.nro: Tarvittavat mittalaitteet: - Oskilloskooppi - Yleismittari, 2 kpl - Ohjaus- ja etäyksiköt Huom. Arvot mitataan pääasiassa lämmityksen
DIPLOMITYÖESITELMÄ. VALOKAARISUOJAN KEHITTÄMINEN FPGA-TEKNIIKALLA Laajennuskortti VAMP 50 -suojareleeseen. Vaasassa 5.5.2010
 DIPLOMITYÖESITELMÄ VALOKAARISUOJAN KEHITTÄMINEN FPGA-TEKNIIKALLA Laajennuskortti VAMP 50 -suojareleeseen Vaasassa 5.5.2010 Toni Harju Vaasan yliopisto Käsiteltäviä kohtia Taustatietoa Työn vaatimukset
DIPLOMITYÖESITELMÄ VALOKAARISUOJAN KEHITTÄMINEN FPGA-TEKNIIKALLA Laajennuskortti VAMP 50 -suojareleeseen Vaasassa 5.5.2010 Toni Harju Vaasan yliopisto Käsiteltäviä kohtia Taustatietoa Työn vaatimukset
Pyöräkuormaajasimulaattori
 Pyöräkuormaajasimulaattori Pyöräkuormaajasimulaattori Valmistaja MeVea, Lappeenranta Hankittu Varian logistiikkaosastolle 31.12.2013 Hinta 27 000 euroa Fyysisesti pakettiin kuuluu: 55 TV, joka toimii pyöräkuormaajan
Pyöräkuormaajasimulaattori Pyöräkuormaajasimulaattori Valmistaja MeVea, Lappeenranta Hankittu Varian logistiikkaosastolle 31.12.2013 Hinta 27 000 euroa Fyysisesti pakettiin kuuluu: 55 TV, joka toimii pyöräkuormaajan
Signaalien generointi
 Signaalinkäsittelyssä joudutaan usein generoimaan erilaisia signaaleja keinotekoisesti. Tyypillisimpiä generoitavia aaltomuotoja ovat eritaajuiset sinimuotoiset signaalit (modulointi) sekä normaalijakautunut
Signaalinkäsittelyssä joudutaan usein generoimaan erilaisia signaaleja keinotekoisesti. Tyypillisimpiä generoitavia aaltomuotoja ovat eritaajuiset sinimuotoiset signaalit (modulointi) sekä normaalijakautunut
1. Yleistä. 2. Ominaisuudet. 3. Liitännät
 1. Yleistä SerIO on mittaus ja ohjaustehtäviin tarkoitettu prosessorikortti. Se voi ohjemistosta riippuen toimia itsenäisenä yksikkönä tai tietokoneen ohjaamana. Jälkimmäisessä tapauksessa mittaus ja ohjauskomennot
1. Yleistä SerIO on mittaus ja ohjaustehtäviin tarkoitettu prosessorikortti. Se voi ohjemistosta riippuen toimia itsenäisenä yksikkönä tai tietokoneen ohjaamana. Jälkimmäisessä tapauksessa mittaus ja ohjauskomennot
KALIBROINTI RMS EX1. RMS-EX1 KAL FI.docx / BL 1(8)
") KALIBROINTI RMS EX1 RMS-EX1 KAL FI.docx 2002-02-01 / BL 1(8) SISLTÖ 1. KALIBROINTI 1.1. RMC ROTOR POSITION CONTROL 1.2. POT-50 ROTOR POSITION SENSOR 2. SÄÄTÖ 2.1. CMI-RM1 CONTROL MOTOR INTERFACE 2.2. VIM-RM1
KALIBROINTI RMS EX1 RMS-EX1 KAL FI.docx 2002-02-01 / BL 1(8) SISLTÖ 1. KALIBROINTI 1.1. RMC ROTOR POSITION CONTROL 1.2. POT-50 ROTOR POSITION SENSOR 2. SÄÄTÖ 2.1. CMI-RM1 CONTROL MOTOR INTERFACE 2.2. VIM-RM1
DumpDbox-ohjelmiston asennus- ja käyttöohjeet Sisällys
 DumpDbox-ohjelmiston asennus- ja käyttöohjeet Sisällys 1. Esittely... 2 2. Asennusohjeet... 2 3. Yleiskuva ohjelmistosta... 3 4. Tietojen siirtäminen D-Boxin avulla... 4 4.1. Piirturitiedostojen siirtäminen...
DumpDbox-ohjelmiston asennus- ja käyttöohjeet Sisällys 1. Esittely... 2 2. Asennusohjeet... 2 3. Yleiskuva ohjelmistosta... 3 4. Tietojen siirtäminen D-Boxin avulla... 4 4.1. Piirturitiedostojen siirtäminen...
HARJOITUSTYÖ: Mikropunnitus kvartsikideanturilla
 Tämä työohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: Mikropunnitus kvartsikideanturilla Tarvittavat laitteet: 2 kpl
Tämä työohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: Mikropunnitus kvartsikideanturilla Tarvittavat laitteet: 2 kpl
Inputs: b; x= b 010. x=0. Elektroniikkajärjestelmät ETT_2068
 Elektroniikkajärjestelmät ETT_2068 tentti 1) Oheisessa sekvenssilogiikassa tiloille on jo annettu bittivaste 000, 001 jne. Tehtävänäsi on nyt konstruoda sekvenssilogiikka vaihe vaiheelta standarditavalla.
Elektroniikkajärjestelmät ETT_2068 tentti 1) Oheisessa sekvenssilogiikassa tiloille on jo annettu bittivaste 000, 001 jne. Tehtävänäsi on nyt konstruoda sekvenssilogiikka vaihe vaiheelta standarditavalla.
TTS kannattavuuslaskentaohjelma
 TTS kannattavuuslaskentaohjelma Käyttöönotto TTS kannattavuuslaskentaohjelma on suunniteltu yrittäjän apuvälineeksi yrityksen keskeisten kannattavuuden, maksuvalmiuden ja vakavaraisuuden tunnuslukujen
TTS kannattavuuslaskentaohjelma Käyttöönotto TTS kannattavuuslaskentaohjelma on suunniteltu yrittäjän apuvälineeksi yrityksen keskeisten kannattavuuden, maksuvalmiuden ja vakavaraisuuden tunnuslukujen
Ulkoiset mediakortit. Asiakirjan osanumero: Tässä oppaassa kerrotaan ulkoisten tallennusvälinekorttien käytöstä.
 Ulkoiset mediakortit Asiakirjan osanumero: 393506-351 Lokakuu 2005 Tässä oppaassa kerrotaan ulkoisten tallennusvälinekorttien käytöstä. Sisällysluettelo 1 Digitaalisten tallennusvälineiden korttipaikassa
Ulkoiset mediakortit Asiakirjan osanumero: 393506-351 Lokakuu 2005 Tässä oppaassa kerrotaan ulkoisten tallennusvälinekorttien käytöstä. Sisällysluettelo 1 Digitaalisten tallennusvälineiden korttipaikassa
Satelliittipaikannus
 Kolme maailmalaajuista järjestelmää 1. GPS (USAn puolustusministeriö) Täydessä laajuudessaan toiminnassa v. 1994. http://www.navcen.uscg.gov/gps/default.htm 2. GLONASS (Venäjän hallitus) Ilmeisesti 11
Kolme maailmalaajuista järjestelmää 1. GPS (USAn puolustusministeriö) Täydessä laajuudessaan toiminnassa v. 1994. http://www.navcen.uscg.gov/gps/default.htm 2. GLONASS (Venäjän hallitus) Ilmeisesti 11
KON C3004 14.10.2015 H03 Ryhmä G Samppa Salmi, 84431S Joel Tolonen, 298618. Koesuunnitelma
 KON C3004 14.10.2015 H03 Ryhmä G Samppa Salmi, 84431S Joel Tolonen, 298618 Koesuunnitelma Sisällysluettelo Sisällysluettelo 1 1 Tutkimusongelma ja tutkimuksen tavoit e 2 2 Tutkimusmenetelmät 3 5 2.1 Käytännön
KON C3004 14.10.2015 H03 Ryhmä G Samppa Salmi, 84431S Joel Tolonen, 298618 Koesuunnitelma Sisällysluettelo Sisällysluettelo 1 1 Tutkimusongelma ja tutkimuksen tavoit e 2 2 Tutkimusmenetelmät 3 5 2.1 Käytännön
Anturit ja Arduino. ELEC-A4010 Sähköpaja Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka
 Anturit ja Arduino Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka Anturit ja Arduino Luennon sisältö 1. Taustaa 2. Antureiden ominaisuudet 3. AD-muunnos 4. Antureiden lukeminen Arduinolla
Anturit ja Arduino Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka Anturit ja Arduino Luennon sisältö 1. Taustaa 2. Antureiden ominaisuudet 3. AD-muunnos 4. Antureiden lukeminen Arduinolla
ELEC-C5070 Elektroniikkapaja (5 op)
") (5 op) Luento 5 A/D- ja D/A-muunnokset ja niiden vaikutus signaaleihin Signaalin A/D-muunnos Analogia-digitaalimuunnin (A/D-muunnin) muuttaa analogisen signaalin digitaaliseen muotoon, joka voidaan lukea
(5 op) Luento 5 A/D- ja D/A-muunnokset ja niiden vaikutus signaaleihin Signaalin A/D-muunnos Analogia-digitaalimuunnin (A/D-muunnin) muuttaa analogisen signaalin digitaaliseen muotoon, joka voidaan lukea
Eye Pal Solo. Käyttöohje
 Eye Pal Solo Käyttöohje 1 Eye Pal Solon käyttöönotto Eye Pal Solon pakkauksessa tulee kolme osaa: 1. Peruslaite, joka toimii varsinaisena lukijana ja jonka etureunassa on laitteen ohjainpainikkeet. 2.
Eye Pal Solo Käyttöohje 1 Eye Pal Solon käyttöönotto Eye Pal Solon pakkauksessa tulee kolme osaa: 1. Peruslaite, joka toimii varsinaisena lukijana ja jonka etureunassa on laitteen ohjainpainikkeet. 2.
JOHDATUS ELEKTRONIIKKAAN. Oppitunti 2 Elektroniikan järjestelmät
 JOHDATUS ELEKTRONIIKKAAN Oppitunti 2 Elektroniikan järjestelmät 2 ELEKTRONIIKAN JÄRJESTELMÄT Aktiivisuusranneke Mittaa liikettä Keskustelee käyttäjän kanssa ledeillä ja värinällä Keskustelee radioiden
JOHDATUS ELEKTRONIIKKAAN Oppitunti 2 Elektroniikan järjestelmät 2 ELEKTRONIIKAN JÄRJESTELMÄT Aktiivisuusranneke Mittaa liikettä Keskustelee käyttäjän kanssa ledeillä ja värinällä Keskustelee radioiden
MultiBoot. Käyttöopas
 MultiBoot Käyttöopas Copyright 2006 Hewlett-Packard Development Company, L.P. Tässä olevat tiedot voivat muuttua ilman ennakkoilmoitusta. Ainoat HP:n tuotteita ja palveluja koskevat takuut mainitaan erikseen
MultiBoot Käyttöopas Copyright 2006 Hewlett-Packard Development Company, L.P. Tässä olevat tiedot voivat muuttua ilman ennakkoilmoitusta. Ainoat HP:n tuotteita ja palveluja koskevat takuut mainitaan erikseen
HARJOITUSTYÖ: LabVIEW, Kiihtyvyysanturi
 Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: LabVIEW, Kiihtyvyysanturi Tarvittavat laitteet: PC Labview
Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: LabVIEW, Kiihtyvyysanturi Tarvittavat laitteet: PC Labview
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-03 USB-käyttöinen syvyysanturi 5op 13.9.2011-29.11.2011 Johan Backlund Ohjaaja: Johan Grönholm Johdanto Projektin tavoitteena oli suunnitella
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-03 USB-käyttöinen syvyysanturi 5op 13.9.2011-29.11.2011 Johan Backlund Ohjaaja: Johan Grönholm Johdanto Projektin tavoitteena oli suunnitella
Elektroniikkalajin semifinaalitehtävien kuvaukset
 Elektroniikkalajin semifinaalitehtävien kuvaukset Kilpailija rakentaa ja testaa mikrokontrollerilla ohjattavaa jännitereferenssiä hyödyntävän sovelluksen. Toteutus koostuu useasta elektroniikkamoduulista.
Elektroniikkalajin semifinaalitehtävien kuvaukset Kilpailija rakentaa ja testaa mikrokontrollerilla ohjattavaa jännitereferenssiä hyödyntävän sovelluksen. Toteutus koostuu useasta elektroniikkamoduulista.
Ulkoiset mediakortit. Käyttöopas
 Ulkoiset mediakortit Käyttöopas Copyright 2006 Hewlett-Packard Development Company, L.P. SD-logo on omistajansa tavaramerkki. Java on Sun Microsystems, Inc:n tavaramerkki Yhdysvalloissa. Tässä olevat tiedot
Ulkoiset mediakortit Käyttöopas Copyright 2006 Hewlett-Packard Development Company, L.P. SD-logo on omistajansa tavaramerkki. Java on Sun Microsystems, Inc:n tavaramerkki Yhdysvalloissa. Tässä olevat tiedot
1. Yleistä. Kuva 1. Graafinen ohjauspaneeli LCD-näytöllä. Taajuusmuuttajan tila. Panel Ready. 3 Motor Current 3.4 A PAINONÄPPÄIMET
 VACON CX/CXL/CXS Graafinen ohjauspaneeli Sivu 1 1. Yleistä Taajuusmuuttajan tila Panel / Remote = Aktiivinen ohjauspaikka Ready = Syöttöjännitte on kytketty ja taajuusmuuttaja on valmis käyttöön Fault
VACON CX/CXL/CXS Graafinen ohjauspaneeli Sivu 1 1. Yleistä Taajuusmuuttajan tila Panel / Remote = Aktiivinen ohjauspaikka Ready = Syöttöjännitte on kytketty ja taajuusmuuttaja on valmis käyttöön Fault
Digitaalinen signaalinkäsittely Johdanto, näytteistys
 Digitaalinen signaalinkäsittely Johdanto, näytteistys Teemu Saarelainen, teemu.saarelainen@kyamk.fi Lähteet: Ifeachor, Jervis, Digital Signal Processing: A Practical Approach H.Huttunen, Signaalinkäsittelyn
Digitaalinen signaalinkäsittely Johdanto, näytteistys Teemu Saarelainen, teemu.saarelainen@kyamk.fi Lähteet: Ifeachor, Jervis, Digital Signal Processing: A Practical Approach H.Huttunen, Signaalinkäsittelyn
SATE1050 PIIRIANALYYSI II / MAARIT VESAPUISTO: APLAC, MATLAB JA SIMULINK -HARJOITUSTYÖ / SYKSY 2015
 1 SAT1050 PANAYYS / MAAT VSAPUSTO: APA, MATAB JA SMUNK -HAJOTUSTYÖ / SYKSY 2015 Harjoitustyön tarkoituksena on ensisijaisesti tutustua Aplac-, Matab ja Simulink simulointiohjelmistojen ominaisuuksiin ja
1 SAT1050 PANAYYS / MAAT VSAPUSTO: APA, MATAB JA SMUNK -HAJOTUSTYÖ / SYKSY 2015 Harjoitustyön tarkoituksena on ensisijaisesti tutustua Aplac-, Matab ja Simulink simulointiohjelmistojen ominaisuuksiin ja
Matlab-tietokoneharjoitus
 Matlab-tietokoneharjoitus Tämän harjoituksen tavoitteena on: Opettaa yksinkertaisia piirikaavio- ja yksikkömuunnoslaskuja. Opettaa Matlabin perustyökaluja mittausten analysoimiseen. Havainnollistaa näytteenottotaajuuden,
Matlab-tietokoneharjoitus Tämän harjoituksen tavoitteena on: Opettaa yksinkertaisia piirikaavio- ja yksikkömuunnoslaskuja. Opettaa Matlabin perustyökaluja mittausten analysoimiseen. Havainnollistaa näytteenottotaajuuden,
Emerson Process Management Oy. kouluttaa Ä L Y L Ä H E M M Ä S P R O S E S S I A. Sisällysluettelo. sivu. Koulutuspalvelujemme esittely 2
 Emerson Process Management Oy kouluttaa 2008 2009 Sisällysluettelo sivu Koulutuspalvelujemme esittely 2 Räätälöidyt kurssit 2 AMS Kentänhallintaohjelmisto 3 DeltaV Automaatiojärjestelmä 3 Virtaus & Analysointi
Emerson Process Management Oy kouluttaa 2008 2009 Sisällysluettelo sivu Koulutuspalvelujemme esittely 2 Räätälöidyt kurssit 2 AMS Kentänhallintaohjelmisto 3 DeltaV Automaatiojärjestelmä 3 Virtaus & Analysointi
PR 3100 -SARJA ASENNUS JA KYTKENTÄ
 PR 3100 SARJA ASENNUS JA KYTKENTÄ 3100V105 3114V101 FIN Yksiköitä voi syöttää 24 VDC ± 30 % jännitteellä suoraan johdottamalla tai johdottamalla maks. 130 yksikköä rinnakkain toisiinsa. 3405tehonliitäntäyksikkö
PR 3100 SARJA ASENNUS JA KYTKENTÄ 3100V105 3114V101 FIN Yksiköitä voi syöttää 24 VDC ± 30 % jännitteellä suoraan johdottamalla tai johdottamalla maks. 130 yksikköä rinnakkain toisiinsa. 3405tehonliitäntäyksikkö
Alkuraportti. LAPPEENRANNAN TEKNILLINEN YLIOPISTO TIETOJENKÄSITTELYN LAITOS CT10A4000 - Kandidaatintyö ja seminaari
 LAPPEENRANNAN TEKNILLINEN YLIOPISTO TIETOJENKÄSITTELYN LAITOS CT10A4000 - Kandidaatintyö ja seminaari Alkuraportti Avoimen lähdekoodin käyttö WWW-sovelluspalvelujen toteutuksessa Lappeenranta, 30.3.2008,
LAPPEENRANNAN TEKNILLINEN YLIOPISTO TIETOJENKÄSITTELYN LAITOS CT10A4000 - Kandidaatintyö ja seminaari Alkuraportti Avoimen lähdekoodin käyttö WWW-sovelluspalvelujen toteutuksessa Lappeenranta, 30.3.2008,
Signaalien datamuunnokset. Näytteenotto ja pito -piirit
 Signaalien datamuunnokset Muunnoskomponentit Näytteenotto ja pitopiirit Multiplekserit A/D-muuntimet Jännitereferenssit D/A-muuntimet Petri Kärhä 26/02/2008 Signaalien datamuunnokset 1 Näytteenotto ja
Signaalien datamuunnokset Muunnoskomponentit Näytteenotto ja pitopiirit Multiplekserit A/D-muuntimet Jännitereferenssit D/A-muuntimet Petri Kärhä 26/02/2008 Signaalien datamuunnokset 1 Näytteenotto ja
LIIKE Pikakäyttöohje: kokoonpanotietojen syöttäminen
 1 (8) LIIKE Pikakäyttöohje: kokoonpanotietojen syöttäminen 1. Yleistä kokoonpanotietojen syöttämisestä... 2 2. Kokoonpanotietojen syöttäminen kiireellistä kapasiteettia haettaessa... 3 3. Kokoonpanotietojen
1 (8) LIIKE Pikakäyttöohje: kokoonpanotietojen syöttäminen 1. Yleistä kokoonpanotietojen syöttämisestä... 2 2. Kokoonpanotietojen syöttäminen kiireellistä kapasiteettia haettaessa... 3 3. Kokoonpanotietojen
5.6.2013. a. Tavallisesti
 Fysiikan oppilaslaboratorio 5.6.2013 Katja Kuitunenn LOGGER PRO 1 Johdanto KÄYTTÖOHJE Fysiikan oppilaslaboratoriossa useissa töissä käytössä oleva Logger Pro 3 on ohjelma, jolla ohjetaan tietotokoneistettuja
Fysiikan oppilaslaboratorio 5.6.2013 Katja Kuitunenn LOGGER PRO 1 Johdanto KÄYTTÖOHJE Fysiikan oppilaslaboratoriossa useissa töissä käytössä oleva Logger Pro 3 on ohjelma, jolla ohjetaan tietotokoneistettuja
Flash AD-muunnin. suurin kaistanleveys muista muuntimista (gigahertsejä) pieni resoluutio (max 8) kalliita
 pieni resoluutio (max 8) kalliita") Flash AD-muunnin Flash AD-muunnin koostuu monesta peräkkäisestä komparaattorista, joista jokainen vertaa muunnettavaa signaalia omaan referenssijännitteeseensä. Referenssijännite aikaansaadaan jännitteenjaolla:
Flash AD-muunnin Flash AD-muunnin koostuu monesta peräkkäisestä komparaattorista, joista jokainen vertaa muunnettavaa signaalia omaan referenssijännitteeseensä. Referenssijännite aikaansaadaan jännitteenjaolla:
LEGO EV3 Datalogging mittauksia
 LEGO EV3 Datalogging mittauksia Tehtäväkortit 19.2017 Energiamittari/ Tehtäväkortti / 2017Innokas 1 Ledin palamisajan määrittäminen Generaattorin kytkeminen Kytke generaattori energiamittarin sisääntuloon
LEGO EV3 Datalogging mittauksia Tehtäväkortit 19.2017 Energiamittari/ Tehtäväkortti / 2017Innokas 1 Ledin palamisajan määrittäminen Generaattorin kytkeminen Kytke generaattori energiamittarin sisääntuloon
LIIKE Pikakäyttöohje: kokoonpanotietojen syöttäminen
 1 (7) LIIKE Pikakäyttöohje: kokoonpanotietojen syöttäminen 1. Yleistä kokoonpanotietojen syöttämisestä... 2 2. Kokoonpanotietojen syöttäminen kiireellistä kapasiteettia haettaessa... 3 3. Kokoonpanotietojen
1 (7) LIIKE Pikakäyttöohje: kokoonpanotietojen syöttäminen 1. Yleistä kokoonpanotietojen syöttämisestä... 2 2. Kokoonpanotietojen syöttäminen kiireellistä kapasiteettia haettaessa... 3 3. Kokoonpanotietojen
Virtualisointiympäristössä on kolme pääosaa: isäntä (host), virtualisointikerros ja vieras (guest).
, virtualisointikerros ja vieras (guest).") 1 Virtualisoinnin avulla voidaan purkaa suora linkki suoritettavan sovelluksen (tai käyttöjärjestelmän tms.) ja sitä suorittavan laitteiston välillä. Näin saavutetaan joustavuutta laitteiston käytössä.
1 Virtualisoinnin avulla voidaan purkaa suora linkki suoritettavan sovelluksen (tai käyttöjärjestelmän tms.) ja sitä suorittavan laitteiston välillä. Näin saavutetaan joustavuutta laitteiston käytössä.
OPTYMA Control Kylmäjärjestelmän ohjauskeskus
 OPTYMA Control Kylmäjärjestelmän ohjauskeskus Käyttöopas Sisällysluettelo Tuotteet & Sovellukset... 3 Käyttöliittymä... 4 Näyttö... 5 Ohjelmointi... 6 Asetusarvon asettaminen... 6 Hälytykset... 6 Perusasetukset...
OPTYMA Control Kylmäjärjestelmän ohjauskeskus Käyttöopas Sisällysluettelo Tuotteet & Sovellukset... 3 Käyttöliittymä... 4 Näyttö... 5 Ohjelmointi... 6 Asetusarvon asettaminen... 6 Hälytykset... 6 Perusasetukset...
Titta-palvelun käyttöohje
 LUONNOS 2 (12) Sisällysluettelo 1 Rekisteröityminen... 4 2 Kirjautuminen... 5 2.1 Unohtunut salasana... 5 2.2 Unohtunut käyttäjätunnus... 6 3 Etusivu... 6 4 Käyttäjätoiminnot... 6 4.1 Salasanan vaihtaminen...
LUONNOS 2 (12) Sisällysluettelo 1 Rekisteröityminen... 4 2 Kirjautuminen... 5 2.1 Unohtunut salasana... 5 2.2 Unohtunut käyttäjätunnus... 6 3 Etusivu... 6 4 Käyttäjätoiminnot... 6 4.1 Salasanan vaihtaminen...
VAATIMUKSIA YKSINKERTAISILLE VIKAILMAISIMILLE HSV:N KJ-VERKOSSA
 VAATIMUKSIA YKSINKERTAISILLE VIKAILMAISIMILLE HSV:N KJ-VERKOSSA Versio 30.4.2012 Tavoitteena on kehittää Helen Sähköverkko Oy:n keskijännitteiseen kaapeliverkkoon vikailmaisin, joka voitaisiin asentaa
VAATIMUKSIA YKSINKERTAISILLE VIKAILMAISIMILLE HSV:N KJ-VERKOSSA Versio 30.4.2012 Tavoitteena on kehittää Helen Sähköverkko Oy:n keskijännitteiseen kaapeliverkkoon vikailmaisin, joka voitaisiin asentaa
Ohje luottamuksellista tietoa sisältävien sähköpostiviestien lähettämiseen ja vastaanottamiseen
 Ohje luottamuksellista tietoa sisältävien sähköpostiviestien lähettämiseen ja vastaanottamiseen Liikenteen turvallisuusvirasto 27.9.2012 Sisällysluettelo Luottamuksellista tietoa sisältävien sähköpostiviestien
Ohje luottamuksellista tietoa sisältävien sähköpostiviestien lähettämiseen ja vastaanottamiseen Liikenteen turvallisuusvirasto 27.9.2012 Sisällysluettelo Luottamuksellista tietoa sisältävien sähköpostiviestien
KAUKOVALVONTAOHJELMA CARELAY CONTROL WPREMOTE
 KAUKOVALVONTAOHJELMA CARELAY CONTROL WPREMOTE Tämä kuvaus on tarkoitettu Carelay - tuotteen Waterpumps WP:n ja Power Factor::n sovelluskohteisiin. Yleistä Carelay Control Wpremote on kaukovalvontaohjelma,
KAUKOVALVONTAOHJELMA CARELAY CONTROL WPREMOTE Tämä kuvaus on tarkoitettu Carelay - tuotteen Waterpumps WP:n ja Power Factor::n sovelluskohteisiin. Yleistä Carelay Control Wpremote on kaukovalvontaohjelma,
Samurai helppokäyttöinen ohjelma melun ja värähtelyjen mittauksiin
 Samurai helppokäyttöinen ohjelma melun ja värähtelyjen mittauksiin SAMURAI on SINUS Messtechnik GmbH:n uusin ohjelmisto melun ja tärinän mittauksiin ja reaaliaikaiseen analysointiin. Tiedonkeruulaitteena
Samurai helppokäyttöinen ohjelma melun ja värähtelyjen mittauksiin SAMURAI on SINUS Messtechnik GmbH:n uusin ohjelmisto melun ja tärinän mittauksiin ja reaaliaikaiseen analysointiin. Tiedonkeruulaitteena
Tietorakenteet ja algoritmit
 Tietorakenteet ja algoritmit Kurssin sisältö pääpiirteittäin Tarvittavat pohjatiedot Avainsanat Abstraktio Esimerkkiohjelman tehtäväkuvaus Abstraktion käyttö tehtävässä Abstrakti tietotyyppi Hyötyjä ADT:n
Tietorakenteet ja algoritmit Kurssin sisältö pääpiirteittäin Tarvittavat pohjatiedot Avainsanat Abstraktio Esimerkkiohjelman tehtäväkuvaus Abstraktion käyttö tehtävässä Abstrakti tietotyyppi Hyötyjä ADT:n
PM10OUT2A-kortti. Ohje
 PM10OUT2A-kortti Ohje Dokumentin ID 6903 V3 13.4.2015 Sisällysluettelo Sisällysluettelo... 2 Esittely... 3 Kortti ja rekisterit... 3 Lähtöviestit... 4 Signaalien kytkeminen... 4 Käyttö... 4 Asetusten tekeminen...
PM10OUT2A-kortti Ohje Dokumentin ID 6903 V3 13.4.2015 Sisällysluettelo Sisällysluettelo... 2 Esittely... 3 Kortti ja rekisterit... 3 Lähtöviestit... 4 Signaalien kytkeminen... 4 Käyttö... 4 Asetusten tekeminen...
OHJELMOINTILAITE 10/50
 OHJELMOINTILAITE 10/50 1 2 3 4 5 6 17 16 15 7 14 8 13 12 11 10 9 1) Näyttö 1 taivutuksen nro. 2) Näyttö 2 kulma 3) LED merkkivalo MANUAALI 4) OFF-SET. 5) Taivutussuunta. 6) Palautus 7) Käynnistys ja resetointi.
OHJELMOINTILAITE 10/50 1 2 3 4 5 6 17 16 15 7 14 8 13 12 11 10 9 1) Näyttö 1 taivutuksen nro. 2) Näyttö 2 kulma 3) LED merkkivalo MANUAALI 4) OFF-SET. 5) Taivutussuunta. 6) Palautus 7) Käynnistys ja resetointi.
Sääasema Probyte JUNIOR
 Sääasema Probyte JUNIOR JUNIOR sääanturi COM1 12VDC RS-232 signaali PC W9x Excel-tiedosto PROBYTE JUNIOR sääanturin toimintaperiaate Yleistä Probyte SÄÄASEMA JUNIOR1 on sään mittaukseen tarkoitettu ulkoanturi,
Sääasema Probyte JUNIOR JUNIOR sääanturi COM1 12VDC RS-232 signaali PC W9x Excel-tiedosto PROBYTE JUNIOR sääanturin toimintaperiaate Yleistä Probyte SÄÄASEMA JUNIOR1 on sään mittaukseen tarkoitettu ulkoanturi,
MPCC-työkalua voidaan käyttää yhden laitteen valvontaan ja yhden tai useamman laitteen konfigurointiin (Modbus broadcast, osoite 0).
.") V1.0.0 (14.10.2015) 1 (7) KYTKENTÄ HUOM: toimii Modbus-masterina. Tämän vuoksi toinen mahdollinen Modbus-master on irrotettava verkosta, kun kytketään valmiiseen Modbus-verkkoon. Produalin Modbus-laitteiden
V1.0.0 (14.10.2015) 1 (7) KYTKENTÄ HUOM: toimii Modbus-masterina. Tämän vuoksi toinen mahdollinen Modbus-master on irrotettava verkosta, kun kytketään valmiiseen Modbus-verkkoon. Produalin Modbus-laitteiden
Phantom / H3-3D Gimbal Kalibrointiohjeet. Aloitus:
 Phantom / H3-3D Gimbal Kalibrointiohjeet - Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset - IMU kalibrointi
Phantom / H3-3D Gimbal Kalibrointiohjeet - Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset - IMU kalibrointi
6. Analogisen signaalin liittäminen mikroprosessoriin 2 6.1 Näytteenotto analogisesta signaalista 2 6.2. DA-muuntimet 4
 Datamuuntimet 1 Pekka antala 19.11.2012 Datamuuntimet 6. Analogisen signaalin liittäminen mikroprosessoriin 2 6.1 Näytteenotto analogisesta signaalista 2 6.2. DA-muuntimet 4 7. AD-muuntimet 5 7.1 Analoginen
Datamuuntimet 1 Pekka antala 19.11.2012 Datamuuntimet 6. Analogisen signaalin liittäminen mikroprosessoriin 2 6.1 Näytteenotto analogisesta signaalista 2 6.2. DA-muuntimet 4 7. AD-muuntimet 5 7.1 Analoginen
Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla.
 Speedohealer V4 Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla. 1. Esipuhe Onnittelemme sinua Speedohealer laitteen oston johdosta. HealTech Electronics Ltd. on omistautunut
Speedohealer V4 Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla. 1. Esipuhe Onnittelemme sinua Speedohealer laitteen oston johdosta. HealTech Electronics Ltd. on omistautunut
Ulkoiset laitteet Käyttöopas
 Ulkoiset laitteet Käyttöopas Copyright 2008 Hewlett-Packard Development Company, L.P. Tässä olevat tiedot voivat muuttua ilman ennakkoilmoitusta. Ainoat HP:n tuotteita ja palveluja koskevat takuut mainitaan
Ulkoiset laitteet Käyttöopas Copyright 2008 Hewlett-Packard Development Company, L.P. Tässä olevat tiedot voivat muuttua ilman ennakkoilmoitusta. Ainoat HP:n tuotteita ja palveluja koskevat takuut mainitaan
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA. Lauri Karppi j82095. SATE.2010 Dynaaminen kenttäteoria DIPOLIRYHMÄANTENNI.
 VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Oskari Uitto i78966 Lauri Karppi j82095 SATE.2010 Dynaaminen kenttäteoria DIPOLIRYHMÄANTENNI Sivumäärä: 14 Jätetty tarkastettavaksi: 25.02.2008 Työn
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Oskari Uitto i78966 Lauri Karppi j82095 SATE.2010 Dynaaminen kenttäteoria DIPOLIRYHMÄANTENNI Sivumäärä: 14 Jätetty tarkastettavaksi: 25.02.2008 Työn
seppo.vehviläinen@electrix.fi
 moduuli Seppo Vehviläinen MX Electrix Oy seppo.vehviläinen@electrix.fi 1 eql sähkön laadun hallinta MITTAUKSESTA RAPORTOINTIIN Jännitetasot Välkyntä Jännitekatkot Jännitekuopat Kokonaissäröt Harmoniset
moduuli Seppo Vehviläinen MX Electrix Oy seppo.vehviläinen@electrix.fi 1 eql sähkön laadun hallinta MITTAUKSESTA RAPORTOINTIIN Jännitetasot Välkyntä Jännitekatkot Jännitekuopat Kokonaissäröt Harmoniset
Varauspumppu-PLL. Taulukko 1: ulostulot sisääntulojen funktiona
 Varauspumppu-PLL Vaihevertailija vertaa kelloreunoja aikatasossa. Jos sisääntulo A:n taajuus on korkeampi tai vaihe edellä verrattuna sisääntulo B:hen, ulostulo A on ylhäällä ja ulostulo B alhaalla ja
Varauspumppu-PLL Vaihevertailija vertaa kelloreunoja aikatasossa. Jos sisääntulo A:n taajuus on korkeampi tai vaihe edellä verrattuna sisääntulo B:hen, ulostulo A on ylhäällä ja ulostulo B alhaalla ja
Peltorobotin akselimoduulin kontrolleri
 Peltorobotin akselimoduulin kontrolleri Automaatio- ja systeemitekniikan projektityöt B.Sc. Joni Rannisto (Mech.) Janne Hafrén (Mech.) Matti Koskinen (Mech.) Esitelmän rakenne 1. Tehtävänanto ja vaatimukset
Peltorobotin akselimoduulin kontrolleri Automaatio- ja systeemitekniikan projektityöt B.Sc. Joni Rannisto (Mech.) Janne Hafrén (Mech.) Matti Koskinen (Mech.) Esitelmän rakenne 1. Tehtävänanto ja vaatimukset
GSM OHJAIN FF KÄYTTÖOHJE PLC MAX S03
 GSM OHJAIN FF KÄYTTÖOHJE PLC MAX S03 TRIFITEK FINLAND OY 2012 V1.0 1. OHJELMISTO; ASENTAMINEN, KÄYTTÖ 1.1 Ohjelmiston asentaminen tietokoneeseen, Ajurin asentaminen Laitteen mukana toimitetaan muistitikulla
GSM OHJAIN FF KÄYTTÖOHJE PLC MAX S03 TRIFITEK FINLAND OY 2012 V1.0 1. OHJELMISTO; ASENTAMINEN, KÄYTTÖ 1.1 Ohjelmiston asentaminen tietokoneeseen, Ajurin asentaminen Laitteen mukana toimitetaan muistitikulla
1 YLEISTÄ. Taitaja2002, Imatra Teollisuuselektroniikkatyö Protorakentelu 1.1 PROJEKTIN TARKOITUS
 Taitaja2002, Imatra Teollisuuselektroniikkatyö Protorakentelu 1 YLEISTÄ 1.1 PROJEKTIN TARKOITUS Tämä projekti on mikrokontrollerilla toteutettu lämpötilan seuranta kortti. Kortti kerää lämpöantureilta
Taitaja2002, Imatra Teollisuuselektroniikkatyö Protorakentelu 1 YLEISTÄ 1.1 PROJEKTIN TARKOITUS Tämä projekti on mikrokontrollerilla toteutettu lämpötilan seuranta kortti. Kortti kerää lämpöantureilta
Moottorin kierrosnopeus Tämän harjoituksen jälkeen:
 Moottorin kierrosnopeus Tämän harjoituksen jälkeen: osaat määrittää moottorin kierrosnopeuden pulssianturin ja Counter-sisääntulon avulla, osaat siirtää manuaalisesti mittaustiedoston LabVIEW:sta MATLABiin,
Moottorin kierrosnopeus Tämän harjoituksen jälkeen: osaat määrittää moottorin kierrosnopeuden pulssianturin ja Counter-sisääntulon avulla, osaat siirtää manuaalisesti mittaustiedoston LabVIEW:sta MATLABiin,
Taajuusmittauskilpailu Hertsien herruus 2008. Mittausraportti
 Taajuusmittauskilpailu Hertsien herruus 2008 1. MITTAUSJÄRJESTELMÄ Mittausraportti Petri Kotilainen OH3MCK Mittausjärjestelmän lohkokaavio on kuvattu alla. Vastaanottoon käytettiin magneettisilmukkaantennia
Taajuusmittauskilpailu Hertsien herruus 2008 1. MITTAUSJÄRJESTELMÄ Mittausraportti Petri Kotilainen OH3MCK Mittausjärjestelmän lohkokaavio on kuvattu alla. Vastaanottoon käytettiin magneettisilmukkaantennia
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 2.3.2009 T-106.1208 Ohjelmoinnin perusteet Y 2.3.2009 1 / 28 Puhelinluettelo, koodi def lue_puhelinnumerot(): print "Anna lisattavat nimet ja numerot." print
Ohjelmoinnin perusteet Y Python T-106.1208 2.3.2009 T-106.1208 Ohjelmoinnin perusteet Y 2.3.2009 1 / 28 Puhelinluettelo, koodi def lue_puhelinnumerot(): print "Anna lisattavat nimet ja numerot." print
Fluke 170 -sarjan digitaaliset True-RMS-yleismittarit
 TEKNISET TIEDOT Fluke 170 -sarjan digitaaliset True-RMS-yleismittarit Digitaaliset Fluke 170 -sarjan yleismittarit ovat alan ammattilaisten luottolaitteet sähkö- ja elektroniikkajärjestelmien vianhakuun
TEKNISET TIEDOT Fluke 170 -sarjan digitaaliset True-RMS-yleismittarit Digitaaliset Fluke 170 -sarjan yleismittarit ovat alan ammattilaisten luottolaitteet sähkö- ja elektroniikkajärjestelmien vianhakuun
Asennusopas. Huomautus. Observit RSS
 Asennusopas Observit RSS Versio 5.3 Huomautus Tämä opas on uusia asennuksia varten. Axis-kamerapaketti sisältää käytettävän lehtisen. Jos sinulla on kysyttävää, ota yhteyttä tukeen: +46 60 61 67 50. Tarjoaja:
Asennusopas Observit RSS Versio 5.3 Huomautus Tämä opas on uusia asennuksia varten. Axis-kamerapaketti sisältää käytettävän lehtisen. Jos sinulla on kysyttävää, ota yhteyttä tukeen: +46 60 61 67 50. Tarjoaja:
Käytännön radiotekniikkaa: Epälineaarinen komponentti ja signaalien siirtely taajuusalueessa (+ laboratoriotyön 2 esittely)
") Käytännön radiotekniikkaa: Epälineaarinen komponentti ja signaalien siirtely taajuusalueessa (+ laboratoriotyön 2 esittely) ELEC-C5070 Elektroniikkapaja, 21.9.2015 Huom: Kurssissa on myöhemmin erikseen
Käytännön radiotekniikkaa: Epälineaarinen komponentti ja signaalien siirtely taajuusalueessa (+ laboratoriotyön 2 esittely) ELEC-C5070 Elektroniikkapaja, 21.9.2015 Huom: Kurssissa on myöhemmin erikseen