Vertausjärjestelmät Reference Systems. Fundamentals
|
|
|
- Raili Tikkanen
- 8 vuotta sitten
- Katselukertoja:
Transkriptio

1 Vertausjärjestelmät Reference Systems Fundamentals 1
2 Vertausjärjestelmä vertauskehys Reference System Reference Frame Vertausjärjestelmä on matemaattisten ja fysikaalisten määritelmien joukko, joiden avulla sijainti on teoreettisesti kuvattavissa. Terrestrinen vertausjärjestelmä on sidottu Maahan ja pyörii ja kääntyy Maan mukana avaruudessa. Tähtitieteellisen vertausjärjestelmän asento on sidottu ekstragalaktisiin radiolähteisiin ja ei osallistu Maan pyörimisliikkeeseen. Vertauskehys on vertausjärjestelmän realisaatio joka on luotu parametrien numeroarvojen ja/tai kiintopisteiden koordinaattien avulla. Realisaation määrittelevät origo, mittakaava ja orientaatio sekä tarvittaessa niiden lineaarinen aikariippuvuus. Reference system is a set of rules defining the principles how to describe a position, but contains no numerical values to realize it. Terrestrial R.S. is bound to Earth and has the diurnal motion in space with it. Celestial R.S. is tied to extragalactic radio sources and do not co-rotate with Earth. Reference frame is a realization of a reference system and created based on coordinates of fixed reference points. Defining values are the origin, scale, orientation, and if needed, their time variability. Nimistä ja nimityksistä I Names and conventions I Suomenkieliset nimet uudistuivat 2016 (Julkisen hallinnon suositus 196): Vertausjärjestelmä koordinaattijärjestelmä Vertauskehys koordinaatisto Geodeettiset nimitykset ja paikkatietoterminologia (GIS) poikkeavat toisistaan: (g) vertausjärjestelmä (GIS) ei vastinetta (g) vertauskehys (GIS) koordinaattijärjestelmä Names in Finnish were renewed in 2016 (don t worry in English) Naming convention in geodesy and geoinformatics (GIS) is different: (g) Reference System (GIS) no corresponding term (g) Reference Frame (GIS) Coordinate Reference System Historiallinen syy, yhtenäistäminen ei ole enää mahdollista Historical reasons, no chances anymore to unify the terminology 2
3 Nimistä ja nimityksistä II Names and conventions II Geodesiassa olemassa olevaan vertausjärjestelmään voidaan luoda useita realisaatioita esim. havaintojen tai havaintotarkkuuden lisääntyessä. Paikkatietoterminologiassa jokainen uusi vertauskehys onkin uusi koordinaattijärjestelmä. Ylätason määritelmää koordinaattijärjestelmälle ei ole. Tällä kurssilla käytetään geodesian terminologiaa. In geodesy an existing reference system can contain several realizations, and new realizations can be created with improved accuracy or increased observations. In geoinformatics each new reference frame is called coordinate reference system. There is no upper level definition. In this course we will use geodetic terminology. Satelliitin liikettä ja taivaallisten kohteiden paikkoja on helpompi kuvata järjestelmässä, joka ei pyöri Maan mukana (inertiaalijärjestelmä) Maan pinnalla asioita on helpompi kuvata järjestelmässä, joka pyörii Maan mukana. EOP (Earth Orientation Parameters) sitovat nämä toisiinsa. Motion of a satellite and positions of celestial bodies is easier to explain in a refrence system which do not rotate with Earth (inertial system) Objects on the Earth should be expressed in an Earth-fixed system. These are tied together with EOP (Earth Orientation Parameters) 3

4 Vertausjärjestelmät ja -kehykset Reference Systems and Frames Terrestrial Reference System TRS Celestial Reference System CRS ITRS International TRS ITRF International Terrestrial Reference Frame ITRF1989, ITRF2000, ITRF2008, ITRF2013 EOP Precession Nutation Polar motion UT1 ICRS International CRS ICRF International Celestial Reference Frame ICRF1 ICRF2 TRS Terrestrinen vertausjärjestelmä Terrestrinen vertausjärjestelmä, TRS (Terrestrial Reference System) määrittelee periaatteet, joiden mukaan nykyiset globaalit vertausjärjestelmät on luotu. TRS on kolmiulotteinen, Maan mukana pyörivä koordinaatisto, Origo on Maan massakeskipisteessä z-akseli yhtyy Maan pyörimisakselin suuntaan. Pituuden yksikkönä on SI-järjestelmän metri. mutta tällä ei vielä mitata mitään 4
5 TRS Terrestrial Reference System A Terrestrial Reference System (TRS) is a spatial reference system co-rotating with the Earth in its diurnal motion in space. In such a system, positions of points attached to the solid surface of the Earth have coordinates which undergo only small variations with time, due to geophysical effects (tectonic or tidal deformations). Conventional Terrestrial Reference System (CTRS) is defined by the set of conventions, algorithms and constants which provide the origin, scale and orientation of that system and their time evolution. ITRS International Terrestrial Reference System 1. ITRS on geosentrinen. Origo on Maan massakeskipisteessä, mukaan lukien meret ja ilmakehä; 2. Pituuden yksikkö on metri (SI). Aikakoordinaatti on konsistentti geosentrisen koordinaattiajan (TCG) kanssa IAG:n ja IUGG:n resoluutioiden mukaisesti. Yhteensopivuus saadaan suhteellisuusteoreettisten korjausten kautta; 3. Orientointi on BIH:n (Bureau International de l Heure) vuoden 1984 mallin mukainen; 4. Järjestelmän asennossa tapahtuvat ajalliset muutokset noudattavat einettokiertoa (no-net-rotation, NNR), joka ottaa huomioon koko maapallon tektonisten liikkeiden horisontaalikomponentin. 5
6 ITRS International Terrestrial Reference System 1. ITRS fullfills the definition of the TRS: It is geocentric, the centre of mass being defined for the whole earth, including oceans and atmosphere. 2. The unit of length is the metre (SI). This scale is consistent with the TCG (Geocentric Coordinate Time) time coordinate for a geocentric local frame, in agreement with IAU and IUGG (1991) resolutions. This is obtained by appropriate relativistic modelling. 3. Its orientation was initially given by the BIH orientation at The time evolution of the orientation is ensured by using a no-net-rotation condition with regards to horizontal tectonic motions over the whole earth. Siis mitä??? / What?? 1: Maan massakeskipiste on looginen koordinaatiston origo, koska Maata kiertävät satelliitit kiertävät nimenomaan massakeskipisteen suhteen. Ennen satelliittiaikaa massakeskipisteen paikkaa ja sen ajallista muutosta ei pystytty määrittämään tarkasti. Nykyisin paikka voidaan määrittää millimetrien tarkkuudella. 1: Mass center of the Earth is a logical place for the origin of the coordinates because satellites are orbiting around the mass center. It was not possible to precisely to measure the place and temporal variation of the mass center before the space age. Nowadays we know the place and its variation within millimeters 6
7 Siis mitä??? / What?? 2: Uppoutumatta yleiseen suhteellisuusteoriaan määritelmä kertoo, että pituuden osalta elämme euklidisessa avaruudessa, mutta aikakoordinaatti noudattaa yleisen suhteellisuusteorian periaatteita. Ajassa suhteellisuusteorian mukaiset korjaukset ovatkin niin merkittäviä, että GNSS-laskuissa ja satelliitin kellojen suunnittelussa ne täytyy ottaa huomioon. Avaruuden muuhun metriikkaan suhteellisuusteorian korjaukset ovat paljon pienemmät. 2: Without going too deep in the General Relativity, the definition tells us that length is measured in the Euclidian space whereas the time coordinate is following the general relativity. This is natural, because relativistic corrections are large enough in time that they must be taken into account in GNSS computations and satellite clocks. Relativistic effects in the geometry of space are much smaller. Siis mitä??? / What?? 3: ITRS:ää ei luonnollisesti luotu tyhjästä, vaan taustalla olivat aiemmat globaalit järjestelmät. Niistä uusimmat ja parhaat olivat BIH:n 1980-luvulla luomat realisaatiot, jotka perustuivat VLBI:n, satelliittilaserin, kuulaserin ja Doppler-satelliittien havaintoihin. Tällä määrittelyllä ITRS ja sen realisaatiot saatiin yhteensopiviksi aiempien järjestelmien kanssa. 3: ITRS is based on previous global systems, foremost those of BIH realisations in 1980 s. They based on observations of VLBI, Satellite Laser Ranging, Lunar Laser Ranging and Doppler satellites. With this definition ITRS became compatible with previous systems. BIH: Bureau International de l Heure; ceased in 1987 IERS: International Earth Rotation and Reference Systems Service, current organization to maintain ITRS/ITRF 7


8 Siis mitä??? / What?? 4: Mannerlaatat liikkuvat toistensa suhteen muutamia senttimetrejä vuodessa. Määritelmä tarkoittaa sitä, että kun kaikkien mannerlaattojen liikevektorit lasketaan yhteen, ei nettoliikettä esiinny, ts. x i 0 4: Continents are moving relative to each other a few centimeters per year. The definition means that when the velocity vectors of all continents are summed up, there will be no net rotation, ie x i 0 ITRF International Terrestrial Reference Frame The ITRS is realized by estimates of the coordinates and velocities of a set of stations observed by VLBI, LLR, GPS, SLR, and DORIS. Its name is International Terrestrial Reference Frame (ITRF). ITRF is a set of points with their 3-dimensional Cartesian coordinates which realize ITRS, as defined by the IUGG resolution No. 2 adopted in Vienna, Points defining the ITRF2008; different symbols denote different techniques (GNSS (circles), VLBI (stars), SLR (blue triangles), Doris (open triangles)) 8
9 WGS84 Compatibility The WGS 84 (G730) reference frame was shown to be in agreement, after the adjustment of a best fitting 7-parameter transformation, with the ITRF92 at a level approaching 10 cm [10]. While similar comparisons of WGS 84 (G873) and ITRF94 are still underway, extensive daily orbit comparisons between the NIMA precise ephemerides (WGS 84 (G873) reference frame) and corresponding IGS ephemerides (ITRF94 reference frame) reveal systematic differences no larger than 2 cm [40]. The day-to-day dispersion on these parameters indicates that these differences are statistically insignificant. WGS84(G1762) on senttimetritasolla yhteensopiva ITRF2008:n kanssa. Aiemmat realisaatiot olivat yhteensopivia desimetritasolla; tarkempaa yhteyttä ei voida määrittää, koska WGS84 ei ollut sen tarkemmin realisoitavissa. Vertauskehykset Reference Frames Vertausjärjestelmän realisaatio, esim. maastossa olevia pultteja, joiden koordinaatit mitattu annetun vertausjärjestelmän mukaisesti. Sisältää mittausepävarmuudet, ym. Realization of a reference system, e.g. benchmarks on ground, the coordinates of which are measured according to the definition of a reference system. cm EUREF-FIN ITRF2014 Contains e.g. measurement uncertainties. ETRF89 WGS84 Vanhat terrestriset paikalliset epätarkemmat dm Uudet globaalit tarkemmat m KKJ paikallinen/local ED50 globaali/global Old terrestrial local less precise New global more precise 9
10 Vertauskehyksiä Reference frames WGS-84: GPS:n käyttämä globaali vertauskehys, nyk. lähellä ITRF:ää Global reference frame used by GPS, close to ITRF ITRF-2014: Tarkin käytettävissä oleva globaali vertauskehys, yli 300 pysyvää GNSS-asemaa, koordinaatit ajasta riippuvia Most precisse global refrence frame, more than 300 permanent GNSS stations, coordinates are time-dependent ETRF-XX: Euraasian mannerlaattaan kiinnitettyjä vertauskehyksiä, ensimmäinen realisaatio ETRF-89; nyt ETRF2000 Refernce frame which is fixed to the Eurasian plate, first realization called ETRF-89; now ETRF2000 EUREF-FIN: Suomen kansallinen realisaatio Finnish national realization Eurooppalaiset vertauskehykset European reference frames Globaalit vertauskehykset ajasta riippuvia, eivät sovellu esim. kartoitukseen ETRS-89 määrittelee eurooppalaisen järjestelmän; yhtenevä ITRS:n kanssa hetkellä ETRF-XX (89, 90, 2000); realisoidaan Euraasian mannerlaatan deformoitumattomaan osaan mitattujen kiintopisteverkkojen avulla EPN, Euroopan pysyvä GPS-verkko nykyisin tärkein kiintopisteistö Kansalliset realisaatiot, mm. EUREF-FIN Global refrence frames are time dependent and therefore not suitable e.g. for mapping purposes ETRS-89 defines European system; equal to ITRS epoch ETRF-XX (89, 90, 2000); are realized using a network which is fixed to the stable part of the Eurasian plate EPN is the basic network in Europe EUREF-FIN = Finnish national realization 10

11 EPN ETRF and INSPIRE Up to the ITRF2000, each new realization of the ITRS (ITRFyy), was followed by a new realization of the ETRS89 (ETRFyy). After the ITRF2000, the ETRF2000 was kept as the standard ETRS89 frame. The transformation from ITRFyy to ETRF2000 contains the transformation from ITRFyy to ITRF2000, followed by the transformation from ITRF2000 to ETRF2000. A direct consequence of the ETRS89 definition is that coordinates of stations located in the stable part of Europe have minimal time dependency. The INSPIRE (INfrastructure for SPatial InfoRmation in Europe) Directive (2007 -> ) specifies ETRS89 as the coordinate reference system. (If you ever are in a position to re-define this in INSPIRE, PLEASE, keep S, (ETRS, not ETRF), otherwise huge problems!) The practical consequence of this directive is that the ETRS89 has been adopted in the majority of European countries. 11
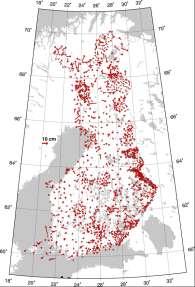
 INSPIRE-yhteensopiva Finnish national reference frame, tied to international frames via permanent GNSS network FinnRef Old triangulation points of")
12 EUREF-FIN Suomen vertauskehys; Sidottu pysyvän GNSS-verkon (FinnRef) kautta kansainvälisiin kehyksiin Vanhojen kolmiopisteiden 100 pisteen aliverkko mitattu (uudelleen 2007) sidos vanhaan järjestelmään (kkj, kartastokoordinaattijärjestelmä) INSPIRE-yhteensopiva Finnish national reference frame, tied to international frames via permanent GNSS network FinnRef Old triangulation points of 100 point network measured in (repeated 2007) to get connection to the old system (kkj, map grid coordinate system) INSPIRE compatible Euroopasta Suomeen From Europe to Finland EPN, Euref permanent GNSS network 12




13 FinnRef Global and regional efforts 13

14 Global Geodetic Reference Frame GGRF The UN Committee of Experts on Global Geospatial Information Management (UN-GGIM) decided in July 2013 to formulate and facilitate a draft resolution for a Global Geodetic Reference Frame. The United Nations General Assembly adopted resolution 69/266 on a Global Geodetic Reference Frame for Sustainable Development in February Total of 53 Member States sponsored the resolution. This decision reinforces the importance of the GGRF UN Resolution on GGRF UN General Assembly urges the sharing of geospatial data to benefit People and Planet To ensure development and sustainability of the GGRF To enhance global and multilateral cooperation To provide technical and knowledge-based assistance for developing countries in need To promote open sharing of geodetic data, standards and conventions To commit the Member States to improving and maintaining geodetic infrastructure (out of currently used best-effort maintenance of geodetic infrastructure) To develop outreach programmes 14



15 GGRF Global collaboration Global geodesy is dependent on contributions from nations all around the globe No single country can maintain the global geodetic reference frame alone We aim to change from the current system where contributions to the development of the global geodetic reference frame are undertaken on a best efforts basis to one where they are made through a multilateral collaboration under a UN mandate 15

16 GGRF: from a working group to a sub-committee on geodesy At the UN-GGIM sixth session in New York in August 2016, the UN- GGIM endorsed the GGRF Roadmap and decided to establish a permanent sub-committee on geodesy. The GGRF roadmap addresses each of the key areas of action described in the UN General Assembly resolution. GGRF Roadmap Data sharing: Development of geodetic standards and open geodetic data sharing are required to enhance and develop the GGRF. Education and capacity building: Appropriate geodetic skills and educational programs are essential for the development, sustainability and utilization of the GGRF. Geodetic infrastructure: A more homogeneous distribution of geodetic infrastructure is needed to develop and utilize an accurate GGRF. Communication and outreach: It is imperative to develop communication and outreach programmes that enable the GGRF to be more visible and understandable to society. Governance: The development and sustainability of the GGRF is reliant on an improved governance structure. 16
 Why: GGRF covers topic globally but cannot act detailed enough on regional level. Continental/regional group is needed.")

17 Expert level Policy making level Global Geodetic Reference Frame for Sustainable Development - the European Contribution: GRF-Europe Position Paper on the UN-GGIM: Europe Working Group: Geodetic Reference Frame (GRF-Europe) Why: GGRF covers topic globally but cannot act detailed enough on regional level. Continental/regional group is needed. Current georeferencing-related organizations in Europe either do not have political or economical power or they are not expert organizations in Geodetic Reference Frames. Basic principle: No new layer or entity is needed but we need an interface and expert group between different actors in the field and the UN- GGIM: Europe UN GA Resolution on GGRF UN Member States UN- GGIM UN- GGIM: Europe Sub-committee on geodesy GRF- Europe Other regional GRF groups EUREF Other European georeferencing organisations 17
 Coordinates the geodetic infrastructure and analysis to maintain refrence frames A part of global reference networks, and contributes to the IAG services The key")
18 EUREF IAG Subcommission for Reference Frames in Europe Definition, realization and maintenance of the European Reference Frame, height system and gravity Promotes the adoption of the reference systems in Europe (ETRS89, EVRS) Coordinates the geodetic infrastructure and analysis to maintain refrence frames A part of global reference networks, and contributes to the IAG services The key infrastructure: EPN EUREF Permanent GNSS Network; voluntary federation of over 100 self-funding agencies, universities, and research institutions in more than 30 European countries with more than 200 GNSS permanent stations Math 18
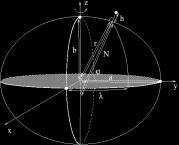
19 Vertausellipsoidi Reference ellipsoid Describes the size and shape of the Earth as well as possible Size and shape of the ellipsoid: Semimajor axis a and semiminor axis b 3D cartesian system: Origin in the mass centre of the Earth, X-axis in the Greenwich meridian, Z-axis in the direction of the CTP (Conventional Terrestrial Pole) Rotates at the angular velocity of the solid Earth Gravity defined at the equator (= normal gravity) x 2 y 2 z b 2 a Erilaisia vertausellipsoideja Various refrence ellipsoids Two ellipsoids GRS80 and WGS84. Almost the same. GRS80 is used with ITRF. 19
20 Erilaisia vertausellipsoideja Various refrence ellipsoids Nowadays geocentric (GRS80, ) Earlier (before space age) fitted to the Earth on one continent; size, shape, origin different (ED50, NAD27, ) Geoid is the actual shape of the Earth; equipotential surface of the geopotential ~ approximate shape of the free ocean surface Ellipsoidin ominaisuuksia Characteristics of an ellipsoid Litistyneisyys (geometrical flattening) Ensimmäinen eksentrisyys (first eccentricity) e Poikittaiskaarevuussäde N (radius of curvature in the prime vertical) N 2 a Geodeettiset koordinaatit / Geodetic coordinates φ = leveysaste / latitude λ = pituusaste / longitude h = korkeus ellipsoidista / height above the ellipsoid Maantieteelliset / Geographic = φ, λ a 2 2 b a a b f a a 2 2 cos b 2 sin 2 20
21 Koordinaatit ellipsoidin pinnalla Coordinates on the ellipsoid surface Geodeettisista (ellipsoidin pinnalla mitattuista) koordinaateista päästään suorakulmaisiin geosentrisiin kaavalla One can transform the geodetic coordinates (measured on the surface of the ellipsoid) to cartesian geocentric coordinates with X N h ( ) cos cos Y N h ( ) cos sin 2 Z b a N h sin 2 Opposite is more complicated Käänteistehtävä suorakulmaisista maantieteellisiin Opposite direction from cartesian to geographic is more difficult because we need to know the latitude φ to compute the radius of curvature N. One method is to use iteration. 21
22 Peruskäsitteitä: Topocentric vs. geocentric Painovoimaan liittyvät koordinaatit Gravity related coordinates Astronominen leveysaste on kulma ekvaattoritason ja luotiviivan suunnan välillä meridiaanitasossa. Astronominen pituusaste on Greenwichin meridiaanitason ja havaintopaikan välinen kulma Astronomical latitude is an angle between the equatorial plane and plumb line in the plane of meridian Astronomical longitude is an angle between the Greenwich meridian plane and the observing point Luotiviivan poikkeama / Deflection of vertical =, Geoid Surface Normal to the ellipsoid Plumb line = ( ) cos, Angle between the plumb line and the normal to the ellipsoid Ellipsoid 22
23 Tähtitieteelliset järjestelmät Celestial reference systems Tähtitieteelliset vertausjärjestelmät Celestial Reference Systems Satelliittien liikkeiden kuvaamiseen tarvitsemme järjestelmän, joka ei ole sidottu Maan pyörimisliikkeeseen. Samassa vertausjärjestelmässä voimme ilmoittaa myös muiden taivaalla olevien kohteiden paikat. Tällaista kutsutaan inertiaalijärjestelmäksi Taivaankappaleiden ja satelliittien näkymiseen maan pinnalta tarvitsemme havaitsijan paikkaan sidotun paikallisen järjestelmän. Celestial reference system can be called as an inertial system because it is not participating the rotation of the Earth. Needed e.g. for computing satellite orbits and describing the positions of celestial bodies. To describe the positions of celestial bodies as seen on the surface of the Earth we need a local system tied to the place of an observer 23
24 Peruskäsitteitä: Horisonttijärjestelmä Horizontal system Paikallinen järjestelmä, jota tarvitaan kohteen paikan ilmoittamiseen havaitsijan suhteen A local system, needed for experssing the position of a celestial body as seen by an observer A = azimuth, a = elevation Peruskäsitteitä:Ekvaattorijärjestelmä Equatorial system Tarvitaan kohteen paikan ilmoittamiseen esim. luetteloita varten. Ei riipu havaitsijan paikasta. Needed for giving the position of a body, e.g. for catalogues. Independent of the position of an observer. α = right ascension, δ = declination Tähtiaika; Sidereal time: 24
 is 3m56s shorter than synodic day (solar day) because the Earth moves on its")

25 Tähtiaika Sidereal time Synodic and sidereal day; sidereal day (actual rotation period of the Earth) is 3m56s shorter than synodic day (solar day) because the Earth moves on its orbit. Sidereal time shows the rotation angle of the Earth relative to stars. Tähtiaika Sidereal time Actual vernal equinox Mean vernal equinox Local meridian Greenwich meridian 25
26 Transformation between horizontal and equatorial coordinates.. or using rotation matrices 26
 is responsible for producing these information ICRS Its origin is located at the barycenter of the")
27 Kansainvälinen tähtitieteellinen vertausjärjestelmä ICRS HUOM: ICRS:n määritelmä ei ole sidottu Maan rataan tai asentoon, eikä siten ole ajasta riippuva! ICRS is independent of Earth position or orientation IERS (International Earth Rotation Service) is responsible for producing these information ICRS Its origin is located at the barycenter of the solar system through appropriate modelling of VLBI observations in the framework of General Relativity (HUOM. joskus voidaan käyttää myös Maan massakeskipistettä). Its pole is in the direction defined by the conventional IAU models for precession (Lieske et al., 1977) and nutation (Seidelmann, 1982). The directions of the ICRS pole and right ascensions origin are maintained fixed relative to the quasars within +/- 20 microarcseconds. The ICRS is realized by VLBI estimates of equatorial coordinates of a set of extragalactic compact radio sources, the International Celestial Reference Frame (ICRF). The ICRS can be connected to the International Terrestrial Reference System (ITRS) by use of the IERS Earth Orientation Parameters (EOP). 27

 programmes. 28")
28 ICRF, International Celestial Reference Frame, defining objects The ICRS is materialized by precise equatorial coordinates of extragalactic radio sources observed in Very Long Baseline Interferometry (VLBI) programmes. 28
29 Earth Orientation Parameters (EOP) The IERS Earth Orientation Parameters (EOP) describe the irregularities of the earth's rotation. Technically, they are the parameters which provide the rotation of the ITRS to the ICRS as a function of time. Universal time. Universal time (UT1) is the time of the earth clock, which performs one revolution in about 24h. It is practically proportional to the sidereal time. The excess revolution time is called length of day (LOD). Coordinates of the pole. x and y are the coordinates of the Celestial Ephemeris Pole (CEP) relative to the IRP, the IERS Reference Pole. The CEP differs from the instantaneous rotation axis by quasi-diurnal terms with amplitudes under 0.01" (see Seidelmann, 1982). The x-axis is in the direction of IRM, the IERS Reference Meridian; the y-axis is in the direction 90 degrees West longitude. Celestial pole offsets. Celestial pole offsets are described in the IAU Precession and Nutation models. The observed differences with respect to the conventional celestial pole position defined by the models are monitored and reported by the IERS. Maan asento avaruudessa Earth Orientation Parameters(EOP) Pyörimisakselin suunta (prekessio, nutaatio, napavariaatio) Pyörimisnopeuden vaihtelut (UT1) Tarvitaan esim. GNSS-havainnoissa Geo-VLBI korvaamaton Direction of the rotation axis (precession, nutation, polar motion) Changes in rotation speed (UT1) Needed e.g. in GNSS observations Geo-VLBI invaluable 29

30 EOP Celestial Pole offset Celestial motion of the pole: precession and nutation. The celestial pole offsets, Dpsi, Depsilon give the offsets in longitude and in obliquity of the celestial pole with respect to its position defined by the conventional IAU precession/nutation models. The observed variations reflect the difference of the actual celestial motion of the pole with the one predicted by the conventional IAU precession and nutation models. The IERS Conventions (1996) correction model matches the observations within +/ ". 30

31 Prekessio; Precession One rotation takes years. Caused by the torque of the Moon. Basic period of nutation 18.6 years, but many other periods down to fortnight. 31



32 Celestial pole offsets: motion of the celestial pole relative to the IAU 1980 Theory of Nutation ant the IAU 1976 Precession. Unit: mas (0.001") IERS Napavariaatio / Polar motion The motion of the rotation axis of the earth relative to the crust has three major components. A free oscillation with period about 435 days (Chandler wobble) and an annual oscillation forced by the seasonal displacement of air and water masses, beating which each other, give the characteristic pulsating shape of the motion. The mean pole has an irregular drift in the direction to 80deg. west 32
 Terrestrinen dynaaminen aika (TDT) Terrestrinen koordinaattiaika (TCT) Terrestrinen aika (TT) Barysentrinen dynaaminen aika (TDB) Barysentrinen koordinaattiaika (TCB) Atomikellot")

33 Ajan eri määritelmiä Time definitions Maan pyörimisliike Yleisaika (UT) Tähtiaika (Q) Earth rotation Universal time Sidereal time Kierto Auringon ympäri (inertiaalikoordinaatistossa käytettävä aika) Efemeridiaika (ET) Terrestrinen dynaaminen aika (TDT) Terrestrinen koordinaattiaika (TCT) Terrestrinen aika (TT) Barysentrinen dynaaminen aika (TDB) Barysentrinen koordinaattiaika (TCB) Atomikellot Kansainvälinen atomiaika (TAI) Koordinoitu yleisaika (UTC) GPS-aika (GPST) muut paikannussatelliittien ajat Orbiting around the Sun inertial frame ephemeris time Terrestrial dynamic time Terrestrial coordinate time terrestrial time barycentric dynamic time barycentric coordinate time Atomic clocks International Atomic time Coordinated Universal time GPS time other navigation satellites 1 cm movement at the equator corresponds 10-5 s in local sidereal time 1 cm movement in a satellite orbit corresponds 10-6 s 1 cm accuracy in range to the satellite corresponds s in time Best atomic clocks: s 33
 is counted from 0 hours at midnight.")
34 UT1 UT1 is the rotation angle about the Earth pole. UT1 can be regarded as a time determined by the rotation of the Earth. UT1 is distributed by the IERS as the difference UT1-UTC in IERS Bulletins A and B and in other data files. Universal Time (UT) is counted from 0 hours at midnight. The unit of duration is the mean solar day. UT0 is the rotational time of a particular place of observation. UT1 is computed by correcting UT0 for the effect of polar motion on the longitude of the observing site. Rotation speed of the Earth is decreasing. Therefore difference between UT1 and TAI is increasing. Clock are synchronised to TAI but following changes in UT1. Time used in civil life is called UTC; leap seconds are applied to keep UTC synchronised with UT1. 34



35 LOD ja karkaussekunnit LOD and leap seconds Vuorokauden pituuden muutokset Changes in the length of day 35



36 Muunnokset Transformations Globaalit, alueelliset ja paikalliset vertauskehykset Global, regional and local reference frames Degerby 36

.")
37 Continents are moving Now Continents are moving a few cm/year This affects on global reference systems Coordinates of stations are changing a few cm/year For practical purposes time-dependent coordinates have not been preferable BUT: how in the future? -750 M yr Plate tectonics NNR - NUVEL If the actual velocity vector (recommended) of a point is not available, use model. One of the most common is NNR-NUVEL (=No-Net-Rotation). More modern ones exist but this is sufficient in many cases, and in most precise work, models are not preferable at all. 37
 National realisations of ETRS89 (These are close enough of global, so that in smaller networks and navigation, RTK &c one can directly measure in ETRFyy)")
38 Transformations Computation should be done in the same reference frame as the satellite orbits are given IGS precise orbits: ITRF2008 / IGS08 (soon ITRF2014) Broadcast ephemeris: WGS84 (but it is within a few cm the same as ITRF2008) National realisations of ETRS89 (These are close enough of global, so that in smaller networks and navigation, RTK &c one can directly measure in ETRFyy) Transformation to the reference frame of the user Epoch shift (crustal motions) Reference frame difference (geocentric) Reference frame difference 2 (old non-geocentric systems) 38
 Results are needed in a")


39 From global to local reference frame The very basic issue in GNSS positioning: Measurements are made in a global reference frame (ITRFxx) Results are needed in a local reference frame, e.g. Jokkmokk municipality reference frame How we can do this? Depends on From local frame to local frame We are here Coordinates points here Adjusting the old coordinates to match with the new reference frame Art of coordinate transformation and uncertainties of the transformation Local crustal movements 39
40 Vertauskehysten väliset muunnokset Transformations between reference frames Yhdenmuotoisuusmuunnos (Helmert-muunnos) Similarity transformation tai Be careful when applying the rotation matrix; you have to take one above depending on which is the direction the angle is growing (clockwise/counterclockwise). Numerical values for the rotation angles e must be taken from the same source. NB: e:s are normally given in arc seconds, but they must be inserted in the formula radians! Affiininen muunnos Affine transformation Shapes of areas are not preserved; m is scale 40
41 Polynomimuunnos Polynomial transformation Polynomial transformation is handy in some cases where you can use a low-order surface (say 2nd order polynomial surface). However, when going outside the defining network, accuracy drops quickly especially if the degree of the polynomial is big. Never apply polynomial transformation outside the area where it is defined! Interpolointi Interpolation This is a dream of a consultant! Additionally, it is fast, and accuracy can be controlled by density of the grid. User sees only the grid, not how the transformation is made. Can be used in many purposes, coordinate transformation, height, geoid model, Same software, just the dataset is changed. 41

42 Example of residuals Koordinaattimuunnospalvelu Coordinate transformation service 42
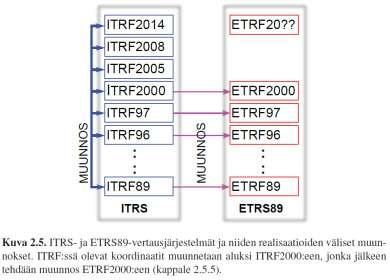
43 ITRF ETRF transformation 43


44 ETRS89 realizations 44

45 Korkeudet Heights Height Water is always flowing downhill but GNSS does not know it M.C. Escher 45



46 Geoid and GNSS W 0 = agreed value for the geopotential of the geoid Heights H are based on gravity-related equipotential surfaces One surface has a special meaning, the geoid Heights H refer to the geoid which coincides the sea surface (not quite true but that is another story) GNSS-related heights h refer to the ellipsoid To connect these two, one needs a geoid model giving the height of the geoid N from the ellipsoid H = h N Geoid and GNSS An example at the Gulf of Finland Going from Hangö to Vyborg GNSS claims the sea surface being more than 4 m lower at Vyborg Levellers and the physical reality disagree 46


47 Geoid and GNSS Several geoid models available regional and global ones Geoid models are improving all the time Differences between models even several decimeters Best and most accurate models in Fennoscandian area are the NKG geoid models They can be fitted to the National height system to get the heights directly in the national system: H gl = h N global H NKG = h N NKG H Local = h N fitted Your heights can be off by decimeters if you do not use a geoid model fitted in the local height system! e.g. in Finland FIN2005N00 is fitted to the N2000 height system to give directly N2000 heights Global geoid model EGM


48 FIN2005N00 National geoid model, fitted directly to the N2000 height system H N2000 = h GNSS N FIN2005N00 Towards Dynamic Reference Systems? 48
49 Global Reference Frame A reference frame is realized with a global network of permanent geodetic observing stations Stations defining the realization are on different continents Coordinates of stations are changing a few cm/year For practical purposes timedependent coordinates have not been preferable BUT: how in the future? Regional Reference Frames EPN; EUREF Permanent GNSS Network To overcome issues in global reference frame, regional systems / frames have been established In Europe, ETRS89 -> ETRF89/2000 Fixed on and moving with the Eurasian continent As the first approximation, station coordinates in ETRFxx will not change with time ETRS89 based reference frames are in use in European countries; Regulated by EU Directive INSPIRE 49

50 Local reference frames National and local reference frames are either based on ETRS89, or something else Traditionally, e.g. land information is based on coordinates in a local 2-D system Crustal deformation There are movements of reference points on several scales 1. Continents are moving a few cm/year absolute position on the Earth is changed Since 1989 Eurasian plate has moved on Earth surface about 80 cm 2. Wide area movements within a continent; as an example the post-glacial rebound in Fennoscandia and Canada or deformations at plate-margin areas 3. Local abrupt movements, like earthquakes or landslides 4. Local slow movements, like subsidence of ground, local tectonics, volcanos, &c To manage the temporal variation in our reference frame, we should know the movements better than 0.5 mm/year. Only case 1 is manageable, partly case 2. 50

51 Crustal deformation within a continent Horizontal and vertical deformation of Eurasian plate. There are large differences within the continent. No single model can describe the motion. Continuous monitoring the motion, improving models, updating reference frames, Traditional way to measure Fixed benchmarks, relative of which measurements are made GNSS receivers on every point (or RTK) New points are automatically in the same reference frame Coordinates need update only if the whole reference frame is changed 51
52 Measurements without external fixed points Traditionally, precise GNSS measurements are done relative to a fixed point, coordinates of which are known Accuracy = centimetres New emerging technique PPP to measure coordinates on centimetre level as an absolute position on Earth without reference points Currently used in research, long observing times (hours) With new GNSS systems (GPS + Galileo, Glonass, Beidou) can be done in a routine way and real time; expected within next 5 years Coordinates are automatically in global frame, no direct link to a local frame Measurements without external fixed points 52


53 Measurements without external fixed points We keep coordinates fixed but at every time they point on a different place! 53

54 or we keep place fixed but every time it has different coordinates Coordinates are in global reference frame at the epoch of the measurement Every time we get different coordinates for the same point due to crustal movements If we keep coordinates fixed, they point to a different place To get the measurement show the same point we must change the coordinates We should know crustal movements within 0.5 mm/yr everywhere But we don t and we can t To fix or not to fix. That s the problem We have very precise coordinates but where on the Earth they point to? Epoch ± ± ±
55 Active vs. passive reference points Passive points: traditional surveying markers attached on stable surface (bedrock, boulders, buildings, large constructions ) Keeping their coordinates fixed and measuring new points relative to them will give you the new points also in the same reference frame Network is deformed with time; periodical renewal necessary Active points: Permanent GNSS stations Coordinates up-to-date in global reference frame Models are needed to get coordinates in the local frame (e.g. ETRS89 national realization) Static/Semi Dynamic/Dynamic Static = everything in national ETRS89-/EVRS-based coordinates. Deforming crust causing deterioration of accuracies in time -> requires regular renewals of reference frames. Semi-dynamic = positioning in global (dynamic/kinematic) ITRS-based coordinates, registries in national (static) ETRS89-/EVRS-based coordinates. Transformation, including a deformation (land uplift) model, takes care of deformations and guarantees accuracy between the global and national coordinates. Dynamic = everything in global (dynamic/kinematic) ITRS-based coordinates. Physical heights should be dynamic/kinematic too, but currently no such system exist. All coordinates are available in real-time (or transformable to any epoch) and thus they are accurately reflecting reality. BTW: In reality, kinematic, not dynamic!!! 55
56 Future? Near future Now Consequences and actions if we move from static reference frames to semi-dynamic or dynamic Example: cadastre coordinate reference system + precise positioning + current registry information + legal issues Datum type Precise positioning 3 Reference system in registers Changes to current register Legal issues Static ETRS89 (regional) ETRS89, EVRS 2 None None Semidynamic ITRS (global) 1 ETRS89, EVRS 2 None None(?) N K G Dynamic ITRS (global) ITRS, EVRS(?) Improved land uplift model (3D) and practices Improved Geoid model (ETRS89 EVRS) Improved positioning (techniques) 2 Positions: N,E,H X,Y,Z,VX,VY, VZ,t 1 Changing coordinates Static: benefits and challenges Traditional situation now with fixed benchmarks and local system: + Coordinates are measured relative to other fixed benchmarks + Coordinates are in the same system as the control network + No time evolution, no need to fix an epoch + Simple to maintain registers - The whole reference system is getting old ; renewal necessary in regular intervals - Technical development and new methods allow more precise measurements; uncertainties in the old system becomes visible - Establishment of benchmarks - Renewal process slow and expensive needs to find a method to extend the lifetime of a reference system 56
57 Semi dynamic: benefits and challenges Measurements in global system, fixed reference stations included, measured to a physical fixed benchmark + Relative to other fixed benchmarks + All coordinates are transformed with the same procedure and parameters, relative accuracy maintained within the network + Simple to maintain registers - Small time dependency due to uncertainties in transformation; need to add epoch information - One needs to know crustal deformation everywhere in the area - Uncertainties increase with time - Establishment of a benchmark Dynamic: benefits and challenges Measurements with PPP, no fixed benchmarks + Cost effective, no benchmarks or network needed + One GNSS receiver only is needed + Can be measured at any time any number of points, no need for network planning or benchmark establishment - Time dependent; every time new coordinates are given to the same point - Register maintenance difficult; measurement epoch and 3-D velocity of the point must be known; all old values must be kept as well - How to identify the same point at different epochs (e.g. land owning issues ) if no physical markers 57
58 We need to do same things in every case: Static: Transformation to regional/local frame after computed vectors to local benchmarks (or active antennas ); fixed coordinates at fixed place Semi-dynamic: Transformation to regional/local frame after measurements. User will see fixed coordinates in regional/local frame Dynamic: Transformation to regional/local frame if one needs to identify the point at different epochs. User will see changing coordinates BUT: In every case we need deformation model and transformation formulae! 58
Koordinaattijärjestelmä Koordinaatisto Karttaprojektio
 Koordinaattijärjestelmä Koordinaatisto Karttaprojektio Koordinaattijärjestelmä sisältää määritelmät, koordinaatisto on sen realisaatio maastossa ja karttaprojektio tämän esitysmuoto kaksiulotteisella kartalla
Koordinaattijärjestelmä Koordinaatisto Karttaprojektio Koordinaattijärjestelmä sisältää määritelmät, koordinaatisto on sen realisaatio maastossa ja karttaprojektio tämän esitysmuoto kaksiulotteisella kartalla
Koordinaatistoista. Markku Poutanen Geodeettinen laitos. Koordinaattijärjestelmä Koordinaatisto Karttaprojektio
 Koordinaatistoista Markku Poutanen Geodeettinen laitos Koordinaattijärjestelmä Koordinaatisto Karttaprojektio Koordinaattijärjestelmä sisältää määritelmät, Reference system contains definitions koordinaatisto
Koordinaatistoista Markku Poutanen Geodeettinen laitos Koordinaattijärjestelmä Koordinaatisto Karttaprojektio Koordinaattijärjestelmä sisältää määritelmät, Reference system contains definitions koordinaatisto
Capacity Utilization
 Capacity Utilization Tim Schöneberg 28th November Agenda Introduction Fixed and variable input ressources Technical capacity utilization Price based capacity utilization measure Long run and short run
Capacity Utilization Tim Schöneberg 28th November Agenda Introduction Fixed and variable input ressources Technical capacity utilization Price based capacity utilization measure Long run and short run
Efficiency change over time
 Efficiency change over time Heikki Tikanmäki Optimointiopin seminaari 14.11.2007 Contents Introduction (11.1) Window analysis (11.2) Example, application, analysis Malmquist index (11.3) Dealing with panel
Efficiency change over time Heikki Tikanmäki Optimointiopin seminaari 14.11.2007 Contents Introduction (11.1) Window analysis (11.2) Example, application, analysis Malmquist index (11.3) Dealing with panel
Network to Get Work. Tehtäviä opiskelijoille Assignments for students. www.laurea.fi
 Network to Get Work Tehtäviä opiskelijoille Assignments for students www.laurea.fi Ohje henkilöstölle Instructions for Staff Seuraavassa on esitetty joukko tehtäviä, joista voit valita opiskelijaryhmällesi
Network to Get Work Tehtäviä opiskelijoille Assignments for students www.laurea.fi Ohje henkilöstölle Instructions for Staff Seuraavassa on esitetty joukko tehtäviä, joista voit valita opiskelijaryhmällesi
On instrument costs in decentralized macroeconomic decision making (Helsingin Kauppakorkeakoulun julkaisuja ; D-31)
") On instrument costs in decentralized macroeconomic decision making (Helsingin Kauppakorkeakoulun julkaisuja ; D-31) Juha Kahkonen Click here if your download doesn"t start automatically On instrument costs
On instrument costs in decentralized macroeconomic decision making (Helsingin Kauppakorkeakoulun julkaisuja ; D-31) Juha Kahkonen Click here if your download doesn"t start automatically On instrument costs
Gap-filling methods for CH 4 data
 Gap-filling methods for CH 4 data Sigrid Dengel University of Helsinki Outline - Ecosystems known for CH 4 emissions; - Why is gap-filling of CH 4 data not as easy and straight forward as CO 2 ; - Gap-filling
Gap-filling methods for CH 4 data Sigrid Dengel University of Helsinki Outline - Ecosystems known for CH 4 emissions; - Why is gap-filling of CH 4 data not as easy and straight forward as CO 2 ; - Gap-filling
LYTH-CONS CONSISTENCY TRANSMITTER
 LYTH-CONS CONSISTENCY TRANSMITTER LYTH-INSTRUMENT OY has generate new consistency transmitter with blade-system to meet high technical requirements in Pulp&Paper industries. Insurmountable advantages are
LYTH-CONS CONSISTENCY TRANSMITTER LYTH-INSTRUMENT OY has generate new consistency transmitter with blade-system to meet high technical requirements in Pulp&Paper industries. Insurmountable advantages are
1. SIT. The handler and dog stop with the dog sitting at heel. When the dog is sitting, the handler cues the dog to heel forward.
 START START SIT 1. SIT. The handler and dog stop with the dog sitting at heel. When the dog is sitting, the handler cues the dog to heel forward. This is a static exercise. SIT STAND 2. SIT STAND. The
START START SIT 1. SIT. The handler and dog stop with the dog sitting at heel. When the dog is sitting, the handler cues the dog to heel forward. This is a static exercise. SIT STAND 2. SIT STAND. The
7.4 Variability management
 7.4 Variability management time... space software product-line should support variability in space (different products) support variability in time (maintenance, evolution) 1 Product variation Product
7.4 Variability management time... space software product-line should support variability in space (different products) support variability in time (maintenance, evolution) 1 Product variation Product
Uusi Ajatus Löytyy Luonnosta 4 (käsikirja) (Finnish Edition)
 (Finnish Edition)") Uusi Ajatus Löytyy Luonnosta 4 (käsikirja) (Finnish Edition) Esko Jalkanen Click here if your download doesn"t start automatically Uusi Ajatus Löytyy Luonnosta 4 (käsikirja) (Finnish Edition) Esko Jalkanen
Uusi Ajatus Löytyy Luonnosta 4 (käsikirja) (Finnish Edition) Esko Jalkanen Click here if your download doesn"t start automatically Uusi Ajatus Löytyy Luonnosta 4 (käsikirja) (Finnish Edition) Esko Jalkanen
The role of 3dr sector in rural -community based- tourism - potentials, challenges
 The role of 3dr sector in rural -community based- tourism - potentials, challenges Lappeenranta, 5th September 2014 Contents of the presentation 1. SEPRA what is it and why does it exist? 2. Experiences
The role of 3dr sector in rural -community based- tourism - potentials, challenges Lappeenranta, 5th September 2014 Contents of the presentation 1. SEPRA what is it and why does it exist? 2. Experiences
Other approaches to restrict multipliers
 Other approaches to restrict multipliers Heikki Tikanmäki Optimointiopin seminaari 10.10.2007 Contents Short revision (6.2) Another Assurance Region Model (6.3) Cone-Ratio Method (6.4) An Application of
Other approaches to restrict multipliers Heikki Tikanmäki Optimointiopin seminaari 10.10.2007 Contents Short revision (6.2) Another Assurance Region Model (6.3) Cone-Ratio Method (6.4) An Application of
16. Allocation Models
 16. Allocation Models Juha Saloheimo 17.1.27 S steemianalsin Optimointiopin seminaari - Sks 27 Content Introduction Overall Efficienc with common prices and costs Cost Efficienc S steemianalsin Revenue
16. Allocation Models Juha Saloheimo 17.1.27 S steemianalsin Optimointiopin seminaari - Sks 27 Content Introduction Overall Efficienc with common prices and costs Cost Efficienc S steemianalsin Revenue
National Building Code of Finland, Part D1, Building Water Supply and Sewerage Systems, Regulations and guidelines 2007
 National Building Code of Finland, Part D1, Building Water Supply and Sewerage Systems, Regulations and guidelines 2007 Chapter 2.4 Jukka Räisä 1 WATER PIPES PLACEMENT 2.4.1 Regulation Water pipe and its
National Building Code of Finland, Part D1, Building Water Supply and Sewerage Systems, Regulations and guidelines 2007 Chapter 2.4 Jukka Räisä 1 WATER PIPES PLACEMENT 2.4.1 Regulation Water pipe and its
Information on preparing Presentation
 Information on preparing Presentation Seminar on big data management Lecturer: Spring 2017 20.1.2017 1 Agenda Hints and tips on giving a good presentation Watch two videos and discussion 22.1.2017 2 Goals
Information on preparing Presentation Seminar on big data management Lecturer: Spring 2017 20.1.2017 1 Agenda Hints and tips on giving a good presentation Watch two videos and discussion 22.1.2017 2 Goals
The CCR Model and Production Correspondence
 The CCR Model and Production Correspondence Tim Schöneberg The 19th of September Agenda Introduction Definitions Production Possiblity Set CCR Model and the Dual Problem Input excesses and output shortfalls
The CCR Model and Production Correspondence Tim Schöneberg The 19th of September Agenda Introduction Definitions Production Possiblity Set CCR Model and the Dual Problem Input excesses and output shortfalls
On instrument costs in decentralized macroeconomic decision making (Helsingin Kauppakorkeakoulun julkaisuja ; D-31)
") On instrument costs in decentralized macroeconomic decision making (Helsingin Kauppakorkeakoulun julkaisuja ; D-31) Juha Kahkonen Click here if your download doesn"t start automatically On instrument costs
On instrument costs in decentralized macroeconomic decision making (Helsingin Kauppakorkeakoulun julkaisuja ; D-31) Juha Kahkonen Click here if your download doesn"t start automatically On instrument costs
AYYE 9/ HOUSING POLICY
 AYYE 9/12 2.10.2012 HOUSING POLICY Mission for AYY Housing? What do we want to achieve by renting apartments? 1) How many apartments do we need? 2) What kind of apartments do we need? 3) To whom do we
AYYE 9/12 2.10.2012 HOUSING POLICY Mission for AYY Housing? What do we want to achieve by renting apartments? 1) How many apartments do we need? 2) What kind of apartments do we need? 3) To whom do we
Earth System Geodesy (Part 1)
") Earth System Geodesy (Part 1) Markku Poutanen Finnish Geospatial Research Institute FGI markku.poutanen@nls.fi We are living on a restless planet Precise observations are needed to measure and understand
Earth System Geodesy (Part 1) Markku Poutanen Finnish Geospatial Research Institute FGI markku.poutanen@nls.fi We are living on a restless planet Precise observations are needed to measure and understand
Bounds on non-surjective cellular automata
 Bounds on non-surjective cellular automata Jarkko Kari Pascal Vanier Thomas Zeume University of Turku LIF Marseille Universität Hannover 27 august 2009 J. Kari, P. Vanier, T. Zeume (UTU) Bounds on non-surjective
Bounds on non-surjective cellular automata Jarkko Kari Pascal Vanier Thomas Zeume University of Turku LIF Marseille Universität Hannover 27 august 2009 J. Kari, P. Vanier, T. Zeume (UTU) Bounds on non-surjective
Use of spatial data in the new production environment and in a data warehouse
 Use of spatial data in the new production environment and in a data warehouse Nordic Forum for Geostatistics 2007 Session 3, GI infrastructure and use of spatial database Statistics Finland, Population
Use of spatial data in the new production environment and in a data warehouse Nordic Forum for Geostatistics 2007 Session 3, GI infrastructure and use of spatial database Statistics Finland, Population
C++11 seminaari, kevät Johannes Koskinen
 C++11 seminaari, kevät 2012 Johannes Koskinen Sisältö Mikä onkaan ongelma? Standardidraftin luku 29: Atomiset tyypit Muistimalli Rinnakkaisuus On multicore systems, when a thread writes a value to memory,
C++11 seminaari, kevät 2012 Johannes Koskinen Sisältö Mikä onkaan ongelma? Standardidraftin luku 29: Atomiset tyypit Muistimalli Rinnakkaisuus On multicore systems, when a thread writes a value to memory,
On instrument costs in decentralized macroeconomic decision making (Helsingin Kauppakorkeakoulun julkaisuja ; D-31)
") On instrument costs in decentralized macroeconomic decision making (Helsingin Kauppakorkeakoulun julkaisuja ; D-31) Juha Kahkonen Click here if your download doesn"t start automatically On instrument costs
On instrument costs in decentralized macroeconomic decision making (Helsingin Kauppakorkeakoulun julkaisuja ; D-31) Juha Kahkonen Click here if your download doesn"t start automatically On instrument costs
Results on the new polydrug use questions in the Finnish TDI data
 Results on the new polydrug use questions in the Finnish TDI data Multi-drug use, polydrug use and problematic polydrug use Martta Forsell, Finnish Focal Point 28/09/2015 Martta Forsell 1 28/09/2015 Esityksen
Results on the new polydrug use questions in the Finnish TDI data Multi-drug use, polydrug use and problematic polydrug use Martta Forsell, Finnish Focal Point 28/09/2015 Martta Forsell 1 28/09/2015 Esityksen
Uusi koordinaatti- ja korkeusjärjestelmä
 Uusi koordinaatti- ja korkeusjärjestelmä Markku Poutanen Geodeettinen laitos Uusi koordinaatti- ja korkeusjärjestelmä Taustaa Uuden koordinaattijärjestelmän perusteet JHS ja käyttöönotto Uusi korkeusjärjestelmä
Uusi koordinaatti- ja korkeusjärjestelmä Markku Poutanen Geodeettinen laitos Uusi koordinaatti- ja korkeusjärjestelmä Taustaa Uuden koordinaattijärjestelmän perusteet JHS ja käyttöönotto Uusi korkeusjärjestelmä
Constructive Alignment in Specialisation Studies in Industrial Pharmacy in Finland
 Constructive Alignment in Specialisation Studies in Industrial Pharmacy in Finland Anne Mari Juppo, Nina Katajavuori University of Helsinki Faculty of Pharmacy 23.7.2012 1 Background Pedagogic research
Constructive Alignment in Specialisation Studies in Industrial Pharmacy in Finland Anne Mari Juppo, Nina Katajavuori University of Helsinki Faculty of Pharmacy 23.7.2012 1 Background Pedagogic research
Miksi Suomi on Suomi (Finnish Edition)
") Miksi Suomi on Suomi (Finnish Edition) Tommi Uschanov Click here if your download doesn"t start automatically Miksi Suomi on Suomi (Finnish Edition) Tommi Uschanov Miksi Suomi on Suomi (Finnish Edition)
Miksi Suomi on Suomi (Finnish Edition) Tommi Uschanov Click here if your download doesn"t start automatically Miksi Suomi on Suomi (Finnish Edition) Tommi Uschanov Miksi Suomi on Suomi (Finnish Edition)
Returns to Scale II. S ysteemianalyysin. Laboratorio. Esitelmä 8 Timo Salminen. Teknillinen korkeakoulu
 Returns to Scale II Contents Most Productive Scale Size Further Considerations Relaxation of the Convexity Condition Useful Reminder Theorem 5.5 A DMU found to be efficient with a CCR model will also be
Returns to Scale II Contents Most Productive Scale Size Further Considerations Relaxation of the Convexity Condition Useful Reminder Theorem 5.5 A DMU found to be efficient with a CCR model will also be
MEETING PEOPLE COMMUNICATIVE QUESTIONS
 Tiistilän koulu English Grades 7-9 Heikki Raevaara MEETING PEOPLE COMMUNICATIVE QUESTIONS Meeting People Hello! Hi! Good morning! Good afternoon! How do you do? Nice to meet you. / Pleased to meet you.
Tiistilän koulu English Grades 7-9 Heikki Raevaara MEETING PEOPLE COMMUNICATIVE QUESTIONS Meeting People Hello! Hi! Good morning! Good afternoon! How do you do? Nice to meet you. / Pleased to meet you.
TIEKE Verkottaja Service Tools for electronic data interchange utilizers. Heikki Laaksamo
 TIEKE Verkottaja Service Tools for electronic data interchange utilizers Heikki Laaksamo TIEKE Finnish Information Society Development Centre (TIEKE Tietoyhteiskunnan kehittämiskeskus ry) TIEKE is a neutral,
TIEKE Verkottaja Service Tools for electronic data interchange utilizers Heikki Laaksamo TIEKE Finnish Information Society Development Centre (TIEKE Tietoyhteiskunnan kehittämiskeskus ry) TIEKE is a neutral,
anna minun kertoa let me tell you
 anna minun kertoa let me tell you anna minun kertoa I OSA 1. Anna minun kertoa sinulle mitä oli. Tiedän että osaan. Kykenen siihen. Teen nyt niin. Minulla on oikeus. Sanani voivat olla puutteellisia mutta
anna minun kertoa let me tell you anna minun kertoa I OSA 1. Anna minun kertoa sinulle mitä oli. Tiedän että osaan. Kykenen siihen. Teen nyt niin. Minulla on oikeus. Sanani voivat olla puutteellisia mutta
7. Product-line architectures
 7. Product-line architectures 7.1 Introduction 7.2 Product-line basics 7.3 Layered style for product-lines 7.4 Variability management 7.5 Benefits and problems with product-lines 1 Short history of software
7. Product-line architectures 7.1 Introduction 7.2 Product-line basics 7.3 Layered style for product-lines 7.4 Variability management 7.5 Benefits and problems with product-lines 1 Short history of software
ProAgria. Opportunities For Success
 ProAgria Opportunities For Success Association of ProAgria Centres and ProAgria Centres 11 regional Finnish ProAgria Centres offer their members Leadership-, planning-, monitoring-, development- and consulting
ProAgria Opportunities For Success Association of ProAgria Centres and ProAgria Centres 11 regional Finnish ProAgria Centres offer their members Leadership-, planning-, monitoring-, development- and consulting
BLOCKCHAINS AND ODR: SMART CONTRACTS AS AN ALTERNATIVE TO ENFORCEMENT
 UNCITRAL EMERGENCE CONFERENCE 13.12.2016 Session I: Emerging Legal Issues in the Commercial Exploitation of Deep Seabed, Space and AI BLOCKCHAINS AND ODR: SMART CONTRACTS AS AN ALTERNATIVE TO ENFORCEMENT
UNCITRAL EMERGENCE CONFERENCE 13.12.2016 Session I: Emerging Legal Issues in the Commercial Exploitation of Deep Seabed, Space and AI BLOCKCHAINS AND ODR: SMART CONTRACTS AS AN ALTERNATIVE TO ENFORCEMENT
EUREF-FIN JA KORKEUDET. Pasi Häkli Geodeettinen laitos 10.3.2010
 EUREF-FIN JA KORKEUDET Pasi Häkli Geodeettinen laitos 10.3.2010 EUREF-FIN:n joitain pääominaisuuksia ITRF96-koordinaatiston kautta globaalin koordinaattijärjestelmän paikallinen/kansallinen realisaatio
EUREF-FIN JA KORKEUDET Pasi Häkli Geodeettinen laitos 10.3.2010 EUREF-FIN:n joitain pääominaisuuksia ITRF96-koordinaatiston kautta globaalin koordinaattijärjestelmän paikallinen/kansallinen realisaatio
WindPRO version joulu 2012 Printed/Page :47 / 1. SHADOW - Main Result
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
Alternative DEA Models
 Mat-2.4142 Alternative DEA Models 19.9.2007 Table of Contents Banker-Charnes-Cooper Model Additive Model Example Data Home assignment BCC Model (Banker-Charnes-Cooper) production frontiers spanned by convex
Mat-2.4142 Alternative DEA Models 19.9.2007 Table of Contents Banker-Charnes-Cooper Model Additive Model Example Data Home assignment BCC Model (Banker-Charnes-Cooper) production frontiers spanned by convex
Skene. Games Refueled. Muokkaa perustyyl. napsautt. @Games for Health, Kuopio. 2013 kari.korhonen@tekes.fi. www.tekes.fi/skene
 Skene Muokkaa perustyyl. Games Refueled napsautt. @Games for Health, Kuopio Muokkaa alaotsikon perustyyliä napsautt. 2013 kari.korhonen@tekes.fi www.tekes.fi/skene 10.9.201 3 Muokkaa Skene boosts perustyyl.
Skene Muokkaa perustyyl. Games Refueled napsautt. @Games for Health, Kuopio Muokkaa alaotsikon perustyyliä napsautt. 2013 kari.korhonen@tekes.fi www.tekes.fi/skene 10.9.201 3 Muokkaa Skene boosts perustyyl.
Tarua vai totta: sähkön vähittäismarkkina ei toimi? 11.2.2015 Satu Viljainen Professori, sähkömarkkinat
 Tarua vai totta: sähkön vähittäismarkkina ei toimi? 11.2.2015 Satu Viljainen Professori, sähkömarkkinat Esityksen sisältö: 1. EU:n energiapolitiikka on se, joka ei toimi 2. Mihin perustuu väite, etteivät
Tarua vai totta: sähkön vähittäismarkkina ei toimi? 11.2.2015 Satu Viljainen Professori, sähkömarkkinat Esityksen sisältö: 1. EU:n energiapolitiikka on se, joka ei toimi 2. Mihin perustuu väite, etteivät
Salasanan vaihto uuteen / How to change password
 Salasanan vaihto uuteen / How to change password Sisällys Salasanakäytäntö / Password policy... 2 Salasanan vaihto verkkosivulla / Change password on website... 3 Salasanan vaihto matkapuhelimella / Change
Salasanan vaihto uuteen / How to change password Sisällys Salasanakäytäntö / Password policy... 2 Salasanan vaihto verkkosivulla / Change password on website... 3 Salasanan vaihto matkapuhelimella / Change
Huom. tämä kulma on yhtä suuri kuin ohjauskulman muutos. lasketaan ajoneuvon keskipisteen ympyräkaaren jänteen pituus
 AS-84.327 Paikannus- ja navigointimenetelmät Ratkaisut 2.. a) Kun kuvan ajoneuvon kumpaakin pyörää pyöritetään tasaisella nopeudella, ajoneuvon rata on ympyränkaaren segmentin muotoinen. Hitaammin kulkeva
AS-84.327 Paikannus- ja navigointimenetelmät Ratkaisut 2.. a) Kun kuvan ajoneuvon kumpaakin pyörää pyöritetään tasaisella nopeudella, ajoneuvon rata on ympyränkaaren segmentin muotoinen. Hitaammin kulkeva
Keskeisiä näkökulmia RCE-verkoston rakentamisessa Central viewpoints to consider when constructing RCE
 Keskeisiä näkökulmia RCE-verkoston rakentamisessa Central viewpoints to consider when constructing RCE Koordinaattorin valinta ja rooli Selection and role of the coordinator Painopiste: tiede hallinto
Keskeisiä näkökulmia RCE-verkoston rakentamisessa Central viewpoints to consider when constructing RCE Koordinaattorin valinta ja rooli Selection and role of the coordinator Painopiste: tiede hallinto
Tietorakenteet ja algoritmit
 Tietorakenteet ja algoritmit Taulukon edut Taulukon haitat Taulukon haittojen välttäminen Dynaamisesti linkattu lista Linkatun listan solmun määrittelytavat Lineaarisen listan toteutus dynaamisesti linkattuna
Tietorakenteet ja algoritmit Taulukon edut Taulukon haitat Taulukon haittojen välttäminen Dynaamisesti linkattu lista Linkatun listan solmun määrittelytavat Lineaarisen listan toteutus dynaamisesti linkattuna
WindPRO version joulu 2012 Printed/Page :42 / 1. SHADOW - Main Result
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table 13.6.2013 19:42 / 1 Minimum
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table 13.6.2013 19:42 / 1 Minimum
Choose Finland-Helsinki Valitse Finland-Helsinki
 Write down the Temporary Application ID. If you do not manage to complete the form you can continue where you stopped with this ID no. Muista Temporary Application ID. Jos et onnistu täyttää lomake loppuun
Write down the Temporary Application ID. If you do not manage to complete the form you can continue where you stopped with this ID no. Muista Temporary Application ID. Jos et onnistu täyttää lomake loppuun
MUSEOT KULTTUURIPALVELUINA
 Elina Arola MUSEOT KULTTUURIPALVELUINA Tutkimuskohteena Mikkelin museot Opinnäytetyö Kulttuuripalvelujen koulutusohjelma Marraskuu 2005 KUVAILULEHTI Opinnäytetyön päivämäärä 25.11.2005 Tekijä(t) Elina
Elina Arola MUSEOT KULTTUURIPALVELUINA Tutkimuskohteena Mikkelin museot Opinnäytetyö Kulttuuripalvelujen koulutusohjelma Marraskuu 2005 KUVAILULEHTI Opinnäytetyön päivämäärä 25.11.2005 Tekijä(t) Elina
Nuku hyvin, pieni susi -????????????,?????????????????. Kaksikielinen satukirja (suomi - venäjä) (www.childrens-books-bilingual.com) (Finnish Edition)
 (www.childrens-books-bilingual.com) (Finnish Edition)") Nuku hyvin, pieni susi -????????????,?????????????????. Kaksikielinen satukirja (suomi - venäjä) (www.childrens-books-bilingual.com) (Finnish Edition) Click here if your download doesn"t start automatically
Nuku hyvin, pieni susi -????????????,?????????????????. Kaksikielinen satukirja (suomi - venäjä) (www.childrens-books-bilingual.com) (Finnish Edition) Click here if your download doesn"t start automatically
The Viking Battle - Part Version: Finnish
 The Viking Battle - Part 1 015 Version: Finnish Tehtävä 1 Olkoon kokonaisluku, ja olkoon A n joukko A n = { n k k Z, 0 k < n}. Selvitä suurin kokonaisluku M n, jota ei voi kirjoittaa yhden tai useamman
The Viking Battle - Part 1 015 Version: Finnish Tehtävä 1 Olkoon kokonaisluku, ja olkoon A n joukko A n = { n k k Z, 0 k < n}. Selvitä suurin kokonaisluku M n, jota ei voi kirjoittaa yhden tai useamman
Increase of opioid use in Finland when is there enough key indicator data to state a trend?
 Increase of opioid use in Finland when is there enough key indicator data to state a trend? Martta Forsell, Finnish Focal Point 28.9.2015 Esityksen nimi / Tekijä 1 Martta Forsell Master of Social Sciences
Increase of opioid use in Finland when is there enough key indicator data to state a trend? Martta Forsell, Finnish Focal Point 28.9.2015 Esityksen nimi / Tekijä 1 Martta Forsell Master of Social Sciences
Innovative and responsible public procurement Urban Agenda kumppanuusryhmä. public-procurement
 Innovative and responsible public procurement Urban Agenda kumppanuusryhmä https://ec.europa.eu/futurium/en/ public-procurement Julkiset hankinnat liittyvät moneen Konsortio Lähtökohdat ja tavoitteet Every
Innovative and responsible public procurement Urban Agenda kumppanuusryhmä https://ec.europa.eu/futurium/en/ public-procurement Julkiset hankinnat liittyvät moneen Konsortio Lähtökohdat ja tavoitteet Every
A new model of regional development work in habilitation of children - Good habilitation in functional networks
 A new model of regional development work in habilitation of children - Good habilitation in functional networks Salla Sipari, PhD, Principal Lecturer Helena Launiainen, M.Ed, Manager Helsinki Metropolia
A new model of regional development work in habilitation of children - Good habilitation in functional networks Salla Sipari, PhD, Principal Lecturer Helena Launiainen, M.Ed, Manager Helsinki Metropolia
JHS XXX EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa
 JHS XXX EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa Versio: 29.9.2014 (luonnos palautekierrosta varten) Julkaistu: Voimassaoloaika: toistaiseksi Sisällys 1 Johdanto...
JHS XXX EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa Versio: 29.9.2014 (luonnos palautekierrosta varten) Julkaistu: Voimassaoloaika: toistaiseksi Sisällys 1 Johdanto...
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
( ( OX2 Perkkiö. Rakennuskanta. Varjostus. 9 x N131 x HH145
 OX2 9 x N131 x HH145 Rakennuskanta Asuinrakennus Lomarakennus Liike- tai julkinen rakennus Teollinen rakennus Kirkko tai kirkollinen rak. Muu rakennus Allas Varjostus 1 h/a 8 h/a 20 h/a 0 0,5 1 1,5 2 km
OX2 9 x N131 x HH145 Rakennuskanta Asuinrakennus Lomarakennus Liike- tai julkinen rakennus Teollinen rakennus Kirkko tai kirkollinen rak. Muu rakennus Allas Varjostus 1 h/a 8 h/a 20 h/a 0 0,5 1 1,5 2 km
Hankkeiden vaikuttavuus: Työkaluja hankesuunnittelun tueksi
 Ideasta projektiksi - kumppanuushankkeen suunnittelun lähtökohdat Hankkeiden vaikuttavuus: Työkaluja hankesuunnittelun tueksi Erasmus+ -ohjelman hakuneuvonta ammatillisen koulutuksen kumppanuushanketta
Ideasta projektiksi - kumppanuushankkeen suunnittelun lähtökohdat Hankkeiden vaikuttavuus: Työkaluja hankesuunnittelun tueksi Erasmus+ -ohjelman hakuneuvonta ammatillisen koulutuksen kumppanuushanketta
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.9.269
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.9.269
Metsälamminkankaan tuulivoimapuiston osayleiskaava
 VAALAN KUNTA TUULISAIMAA OY Metsälamminkankaan tuulivoimapuiston osayleiskaava Liite 3. Varjostusmallinnus FCG SUUNNITTELU JA TEKNIIKKA OY 12.5.2015 P25370 SHADOW - Main Result Assumptions for shadow calculations
VAALAN KUNTA TUULISAIMAA OY Metsälamminkankaan tuulivoimapuiston osayleiskaava Liite 3. Varjostusmallinnus FCG SUUNNITTELU JA TEKNIIKKA OY 12.5.2015 P25370 SHADOW - Main Result Assumptions for shadow calculations
Kvanttilaskenta - 1. tehtävät
 Kvanttilaskenta -. tehtävät Johannes Verwijnen January 9, 0 edx-tehtävät Vastauksissa on käytetty edx-kurssin materiaalia.. Problem False, sillä 0 0. Problem False, sillä 0 0 0 0. Problem A quantum state
Kvanttilaskenta -. tehtävät Johannes Verwijnen January 9, 0 edx-tehtävät Vastauksissa on käytetty edx-kurssin materiaalia.. Problem False, sillä 0 0. Problem False, sillä 0 0 0 0. Problem A quantum state
Tynnyrivaara, OX2 Tuulivoimahanke. ( Layout 9 x N131 x HH145. Rakennukset Asuinrakennus Lomarakennus 9 x N131 x HH145 Varjostus 1 h/a 8 h/a 20 h/a
 , Tuulivoimahanke Layout 9 x N131 x HH145 Rakennukset Asuinrakennus Lomarakennus 9 x N131 x HH145 Varjostus 1 h/a 8 h/a 20 h/a 0 0,5 1 1,5 km 2 SHADOW - Main Result Assumptions for shadow calculations
, Tuulivoimahanke Layout 9 x N131 x HH145 Rakennukset Asuinrakennus Lomarakennus 9 x N131 x HH145 Varjostus 1 h/a 8 h/a 20 h/a 0 0,5 1 1,5 km 2 SHADOW - Main Result Assumptions for shadow calculations
Research plan for masters thesis in forest sciences. The PELLETime 2009 Symposium Mervi Juntunen
 Modelling tree and stand characteristics and estimating biomass removals and harvesting costs of lodgepole pine (Pinus contorta) plantations in Iceland Research plan for masters thesis in forest sciences
Modelling tree and stand characteristics and estimating biomass removals and harvesting costs of lodgepole pine (Pinus contorta) plantations in Iceland Research plan for masters thesis in forest sciences
EUROOPAN PARLAMENTTI
 EUROOPAN PARLAMENTTI 2004 2009 Kansalaisvapauksien sekä oikeus- ja sisäasioiden valiokunta 2008/0101(CNS) 2.9.2008 TARKISTUKSET 9-12 Mietintöluonnos Luca Romagnoli (PE409.790v01-00) ehdotuksesta neuvoston
EUROOPAN PARLAMENTTI 2004 2009 Kansalaisvapauksien sekä oikeus- ja sisäasioiden valiokunta 2008/0101(CNS) 2.9.2008 TARKISTUKSET 9-12 Mietintöluonnos Luca Romagnoli (PE409.790v01-00) ehdotuksesta neuvoston
TIETEEN PÄIVÄT OULUSSA 1.-2.9.2015
 1 TIETEEN PÄIVÄT OULUSSA 1.-2.9.2015 Oulun Yliopisto / Tieteen päivät 2015 2 TIETEEN PÄIVÄT Järjestetään Oulussa osana yliopiston avajaisviikon ohjelmaa Tieteen päivät järjestetään saman konseptin mukaisesti
1 TIETEEN PÄIVÄT OULUSSA 1.-2.9.2015 Oulun Yliopisto / Tieteen päivät 2015 2 TIETEEN PÄIVÄT Järjestetään Oulussa osana yliopiston avajaisviikon ohjelmaa Tieteen päivät järjestetään saman konseptin mukaisesti
1. Liikkuvat määreet
 1. Liikkuvat määreet Väitelauseen perussanajärjestys: SPOTPA (subj. + pred. + obj. + tapa + paikka + aika) Suora sanajärjestys = subjekti on ennen predikaattia tekijä tekeminen Alasääntö 1: Liikkuvat määreet
1. Liikkuvat määreet Väitelauseen perussanajärjestys: SPOTPA (subj. + pred. + obj. + tapa + paikka + aika) Suora sanajärjestys = subjekti on ennen predikaattia tekijä tekeminen Alasääntö 1: Liikkuvat määreet
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
,0 Yes ,0 120, ,8
 SHADOW - Main Result Calculation: Alue 2 ( x 9 x HH120) TuuliSaimaa kaavaluonnos Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered
SHADOW - Main Result Calculation: Alue 2 ( x 9 x HH120) TuuliSaimaa kaavaluonnos Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table 5.11.2013 16:44 / 1 Minimum
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table 5.11.2013 16:44 / 1 Minimum
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Calculation: N117 x 9 x HH141 Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG
SHADOW - Main Result Calculation: N117 x 9 x HH141 Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG
Oma sininen meresi (Finnish Edition)
") Oma sininen meresi (Finnish Edition) Hannu Pirilä Click here if your download doesn"t start automatically Oma sininen meresi (Finnish Edition) Hannu Pirilä Oma sininen meresi (Finnish Edition) Hannu Pirilä
Oma sininen meresi (Finnish Edition) Hannu Pirilä Click here if your download doesn"t start automatically Oma sininen meresi (Finnish Edition) Hannu Pirilä Oma sininen meresi (Finnish Edition) Hannu Pirilä
Smart specialisation for regions and international collaboration Smart Pilots Seminar
 Smart specialisation for regions and international collaboration Smart Pilots Seminar 23.5.2017 Krista Taipale Head of Internaltional Affairs Helsinki-Uusimaa Regional Council Internationalisation
Smart specialisation for regions and international collaboration Smart Pilots Seminar 23.5.2017 Krista Taipale Head of Internaltional Affairs Helsinki-Uusimaa Regional Council Internationalisation
Koordinaattimuunnospalvelut
 Koordinaattimuunnospalvelut 07.05.2010 Reino Ruotsalainen MAANMITTAUSLAITOS TIETOA MAASTA 2010 Lisätietoja: http://www.fgi.fi/julkaisut/pdf/gltiedote30.pdf Geodeettisen laitoksen tiedote 30/2009: SUOMEN
Koordinaattimuunnospalvelut 07.05.2010 Reino Ruotsalainen MAANMITTAUSLAITOS TIETOA MAASTA 2010 Lisätietoja: http://www.fgi.fi/julkaisut/pdf/gltiedote30.pdf Geodeettisen laitoksen tiedote 30/2009: SUOMEN
Särmäystyökalut kuvasto Press brake tools catalogue
 Finnish sheet metal machinery know-how since 1978 Särmäystyökalut kuvasto Press brake tools catalogue www.aliko.fi ALIKO bending chart Required capacity in kn (T) in relation to V-opening. V R A S = plates
Finnish sheet metal machinery know-how since 1978 Särmäystyökalut kuvasto Press brake tools catalogue www.aliko.fi ALIKO bending chart Required capacity in kn (T) in relation to V-opening. V R A S = plates
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
Infrastruktuurin asemoituminen kansalliseen ja kansainväliseen kenttään Outi Ala-Honkola Tiedeasiantuntija
 Infrastruktuurin asemoituminen kansalliseen ja kansainväliseen kenttään Outi Ala-Honkola Tiedeasiantuntija 1 Asemoitumisen kuvaus Hakemukset parantuneet viime vuodesta, mutta paneeli toivoi edelleen asemoitumisen
Infrastruktuurin asemoituminen kansalliseen ja kansainväliseen kenttään Outi Ala-Honkola Tiedeasiantuntija 1 Asemoitumisen kuvaus Hakemukset parantuneet viime vuodesta, mutta paneeli toivoi edelleen asemoitumisen
TM ETRS-TM35FIN-ETRS89 WTG
 VE1 SHADOW - Main Result Calculation: 8 x Nordex N131 x HH145m Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please
VE1 SHADOW - Main Result Calculation: 8 x Nordex N131 x HH145m Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please
Millaisia mahdollisuuksia kyberturva tarjoaa ja kenelle? Ja mitä on saatu aikaan?
 Millaisia mahdollisuuksia kyberturva tarjoaa ja kenelle? Ja mitä on saatu aikaan? 1 Suomen tietoturvayhtiöillä on merkityksellisiä kasvutavoitteita 2 Kyberturva on vakaasti kasvava osa perinteistä ICT:tä
Millaisia mahdollisuuksia kyberturva tarjoaa ja kenelle? Ja mitä on saatu aikaan? 1 Suomen tietoturvayhtiöillä on merkityksellisiä kasvutavoitteita 2 Kyberturva on vakaasti kasvava osa perinteistä ICT:tä
Data protection template
 Data protection template Aihe: rekisteriseloste ja informointipohja Topic: information about the register and information to users (related to General Data Protection Regulation (GDPR) (EU) 2016/679) Mallina
Data protection template Aihe: rekisteriseloste ja informointipohja Topic: information about the register and information to users (related to General Data Protection Regulation (GDPR) (EU) 2016/679) Mallina
( ,5 1 1,5 2 km
 Tuulivoimala Rakennukset Asuinrakennus Liikerak. tai Julkinen rak. Lomarakennus Teollinen rakennus Kirkollinen rakennus Varjostus "real case" h/a 1 h/a 8 h/a 20 h/a 4 5 3 1 2 6 7 8 9 10 0 0,5 1 1,5 2 km
Tuulivoimala Rakennukset Asuinrakennus Liikerak. tai Julkinen rak. Lomarakennus Teollinen rakennus Kirkollinen rakennus Varjostus "real case" h/a 1 h/a 8 h/a 20 h/a 4 5 3 1 2 6 7 8 9 10 0 0,5 1 1,5 2 km
 Digitally signed by Hans Vadbäck DN: cn=hans Vadbäck, o, ou=fcg Suunnittelu ja Tekniikka Oy, email=hans.vadback@fcg.fi, c=fi Date: 2016.12.20 15:45:35 +02'00' Jakob Kjellman Digitally signed by Jakob Kjellman
Digitally signed by Hans Vadbäck DN: cn=hans Vadbäck, o, ou=fcg Suunnittelu ja Tekniikka Oy, email=hans.vadback@fcg.fi, c=fi Date: 2016.12.20 15:45:35 +02'00' Jakob Kjellman Digitally signed by Jakob Kjellman
Information on Finnish Language Courses Spring Semester 2018 Päivi Paukku & Jenni Laine Centre for Language and Communication Studies
 Information on Finnish Language Courses Spring Semester 2018 Päivi Paukku & Jenni Laine 4.1.2018 Centre for Language and Communication Studies Puhutko suomea? -Hei! -Hei hei! -Moi! -Moi moi! -Terve! -Terve
Information on Finnish Language Courses Spring Semester 2018 Päivi Paukku & Jenni Laine 4.1.2018 Centre for Language and Communication Studies Puhutko suomea? -Hei! -Hei hei! -Moi! -Moi moi! -Terve! -Terve
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table 22.12.2014 11:33 / 1 Minimum
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table 22.12.2014 11:33 / 1 Minimum
ECVETin soveltuvuus suomalaisiin tutkinnon perusteisiin. Case:Yrittäjyyskurssi matkailualan opiskelijoille englantilaisen opettajan toteuttamana
 ECVETin soveltuvuus suomalaisiin tutkinnon perusteisiin Case:Yrittäjyyskurssi matkailualan opiskelijoille englantilaisen opettajan toteuttamana Taustaa KAO mukana FINECVET-hankeessa, jossa pilotoimme ECVETiä
ECVETin soveltuvuus suomalaisiin tutkinnon perusteisiin Case:Yrittäjyyskurssi matkailualan opiskelijoille englantilaisen opettajan toteuttamana Taustaa KAO mukana FINECVET-hankeessa, jossa pilotoimme ECVETiä
KMTK lentoestetyöpaja - Osa 2
 KMTK lentoestetyöpaja - Osa 2 Veijo Pätynen 18.10.2016 Pasila YHTEISTYÖSSÄ: Ilmailun paikkatiedon hallintamalli Ilmailun paikkatiedon hallintamalli (v0.9 4.3.2016) 4.4 Maanmittauslaitoksen rooli ja vastuut...
KMTK lentoestetyöpaja - Osa 2 Veijo Pätynen 18.10.2016 Pasila YHTEISTYÖSSÄ: Ilmailun paikkatiedon hallintamalli Ilmailun paikkatiedon hallintamalli (v0.9 4.3.2016) 4.4 Maanmittauslaitoksen rooli ja vastuut...
VUOSI 2015 / YEAR 2015
 VUOSI 2015 / YEAR 2015 Kansainvälisen opetuksen ja tutkimustoiminnan kehittäminen Developing international teaching and research activities Rehtorin strateginen rahoitus vuosille 2014-2016 / Strategic
VUOSI 2015 / YEAR 2015 Kansainvälisen opetuksen ja tutkimustoiminnan kehittäminen Developing international teaching and research activities Rehtorin strateginen rahoitus vuosille 2014-2016 / Strategic
GNSS-vastaanottimet. Havaintosuureet
 GNSS-vastaanottimet vastanottimien tyyppejä antennit signaalin havaitseminen Havaintosuureet Nyt: C/A-koodi L1 L1-kantoaalto L1 Doppler L2 kantoaalto L2 Doppler P-koodi L1 P-koodi L2 Tulevaisuudessa: C/A-koodi
GNSS-vastaanottimet vastanottimien tyyppejä antennit signaalin havaitseminen Havaintosuureet Nyt: C/A-koodi L1 L1-kantoaalto L1 Doppler L2 kantoaalto L2 Doppler P-koodi L1 P-koodi L2 Tulevaisuudessa: C/A-koodi
HITSAUKSEN TUOTTAVUUSRATKAISUT
 Kemppi ARC YOU GET WHAT YOU MEASURE OR BE CAREFUL WHAT YOU WISH FOR HITSAUKSEN TUOTTAVUUSRATKAISUT Puolitetaan hitsauskustannukset seminaari 9.4.2008 Mikko Veikkolainen, Ratkaisuliiketoimintapäällikkö
Kemppi ARC YOU GET WHAT YOU MEASURE OR BE CAREFUL WHAT YOU WISH FOR HITSAUKSEN TUOTTAVUUSRATKAISUT Puolitetaan hitsauskustannukset seminaari 9.4.2008 Mikko Veikkolainen, Ratkaisuliiketoimintapäällikkö
Fighting diffuse nutrient load: Multifunctional water management concept in natural reed beds
 PhD Anne Hemmi 14.2.2013 RRR 2013 Conference in Greifswald, Germany Fighting diffuse nutrient load: Multifunctional water management concept in natural reed beds Eutrophication in surface waters High nutrient
PhD Anne Hemmi 14.2.2013 RRR 2013 Conference in Greifswald, Germany Fighting diffuse nutrient load: Multifunctional water management concept in natural reed beds Eutrophication in surface waters High nutrient
Statistical design. Tuomas Selander
 Statistical design Tuomas Selander 28.8.2014 Introduction Biostatistician Work area KYS-erva KYS, Jyväskylä, Joensuu, Mikkeli, Savonlinna Work tasks Statistical methods, selection and quiding Data analysis
Statistical design Tuomas Selander 28.8.2014 Introduction Biostatistician Work area KYS-erva KYS, Jyväskylä, Joensuu, Mikkeli, Savonlinna Work tasks Statistical methods, selection and quiding Data analysis
Characterization of clay using x-ray and neutron scattering at the University of Helsinki and ILL
 Characterization of clay using x-ray and neutron scattering at the University of Helsinki and ILL Ville Liljeström, Micha Matusewicz, Kari Pirkkalainen, Jussi-Petteri Suuronen and Ritva Serimaa 13.3.2012
Characterization of clay using x-ray and neutron scattering at the University of Helsinki and ILL Ville Liljeström, Micha Matusewicz, Kari Pirkkalainen, Jussi-Petteri Suuronen and Ritva Serimaa 13.3.2012
Teacher's Professional Role in the Finnish Education System Katriina Maaranen Ph.D. Faculty of Educational Sciences University of Helsinki, Finland
 Teacher's Professional Role in the Finnish Education System Katriina Maaranen Ph.D. Faculty of Educational Sciences University of Helsinki, Finland www.helsinki.fi/yliopisto This presentation - Background
Teacher's Professional Role in the Finnish Education System Katriina Maaranen Ph.D. Faculty of Educational Sciences University of Helsinki, Finland www.helsinki.fi/yliopisto This presentation - Background
Copernicus, Sentinels, Finland. Erja Ämmälahti Tekes,
 Copernicus, Sentinels, Finland Erja Ämmälahti Tekes, 24.5.2016 Finnish Space industry in the European context European Space industry has been constantly growing and increasing its direct employment in
Copernicus, Sentinels, Finland Erja Ämmälahti Tekes, 24.5.2016 Finnish Space industry in the European context European Space industry has been constantly growing and increasing its direct employment in
GOOD WORK LONGER CAREER:
 Juhani Ilmarinen, Ville Ilmarinen, Pekka Huuhtanen, Veikko Louhevaara, Ove Näsman GOOD WORK LONGER CAREER: WORK WELL-BEING IN FINNISH TECHNOLOGY INDUSTRIES 2010-2015 Background Collective agreement between
Juhani Ilmarinen, Ville Ilmarinen, Pekka Huuhtanen, Veikko Louhevaara, Ove Näsman GOOD WORK LONGER CAREER: WORK WELL-BEING IN FINNISH TECHNOLOGY INDUSTRIES 2010-2015 Background Collective agreement between
Guidebook for Multicultural TUT Users
 1 Guidebook for Multicultural TUT Users WORKPLACE PIRKANMAA-hankkeen KESKUSTELUTILAISUUS 16.12.2010 Hyvää käytäntöä kehittämässä - vuorovaikutusopas kansainvälisille opiskelijoille TTY Teknis-taloudellinen
1 Guidebook for Multicultural TUT Users WORKPLACE PIRKANMAA-hankkeen KESKUSTELUTILAISUUS 16.12.2010 Hyvää käytäntöä kehittämässä - vuorovaikutusopas kansainvälisille opiskelijoille TTY Teknis-taloudellinen
Millainen on viihtyisä kaupunki ja miten sitä mitataan?
 Millainen on viihtyisä kaupunki ja miten sitä mitataan? RATKAISUJA LUONNOSTA LYNETIN TUTKIMUSPÄIVÄ 2016 Miimu Airaksinen Research professor VTT Technical Research Centre of Finland Kaupungit ovat tärkeitä
Millainen on viihtyisä kaupunki ja miten sitä mitataan? RATKAISUJA LUONNOSTA LYNETIN TUTKIMUSPÄIVÄ 2016 Miimu Airaksinen Research professor VTT Technical Research Centre of Finland Kaupungit ovat tärkeitä
Curriculum. Gym card
 A new school year Curriculum Fast Track Final Grading Gym card TET A new school year Work Ethic Detention Own work Organisation and independence Wilma TMU Support Services Well-Being CURRICULUM FAST TRACK
A new school year Curriculum Fast Track Final Grading Gym card TET A new school year Work Ethic Detention Own work Organisation and independence Wilma TMU Support Services Well-Being CURRICULUM FAST TRACK
Future and Development of the European Combined Geodetic Network ECGN
 Future and Development of the European Combined Geodetic Network ECGN Markku Poutanen & ECGN Working group *) Markku Poutanen, Martine Amalvict, Carine Bruyninx, Olivier Francis, Johannes Ihde, Ulla Kallio,
Future and Development of the European Combined Geodetic Network ECGN Markku Poutanen & ECGN Working group *) Markku Poutanen, Martine Amalvict, Carine Bruyninx, Olivier Francis, Johannes Ihde, Ulla Kallio,
MRI-sovellukset. Ryhmän 6 LH:t (8.22 & 9.25)
") MRI-sovellukset Ryhmän 6 LH:t (8.22 & 9.25) Ex. 8.22 Ex. 8.22 a) What kind of image artifact is present in image (b) Answer: The artifact in the image is aliasing artifact (phase aliasing) b) How did Joe
MRI-sovellukset Ryhmän 6 LH:t (8.22 & 9.25) Ex. 8.22 Ex. 8.22 a) What kind of image artifact is present in image (b) Answer: The artifact in the image is aliasing artifact (phase aliasing) b) How did Joe