Fotogrammetris geodeettinen menetelmä metsäalueen tarkkaan kartoittamiseen sekä syitä ja muita keinoja maastoaineiston tarkkaan paikantamiseen
|
|
|
- Timo-Jaakko Hakola
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 Fotogrammetris geodeettinen menetelmä metsäalueen tarkkaan kartoittamiseen sekä syitä ja muita keinoja maastoaineiston tarkkaan paikantamiseen.. Fotogrammetrian perusteet.. LiDARin perusteet.. STRS menetelmät.. Aluepohjaiset menetelmät.. Tulosten validointi maasto otoksen paikantaminen.. Yhteenveto

2 Esimerkkiongelmat (Sisältö): 1. Meillä on kaukokartoitushavaintoja passiivisella optisella sensorilla ja/tai laserkeilaimella ja haluaisimme tarkasti tietää mistä kohteista havaintomme ovat. Geometrinen epävarmuus vaikuttaa analyyseihimme. Minimoidaan maastohavaintojen geom. virheet. 2. Meillä on tarkka kaukokartoitus, mutta vain yksi maastomittaaja, jolle on 500 mittavälineet. Haluaisimme kartoittaa ja mitata suurialaisen metsäalueen/koealan suoraan globaaliin koordinaatistoon (metsikkökoeala, pysyvä inventointiala) s.e. geom. tarkkuus on hyvä lokaalisti ja globaalisti.
3 1. Geometrinen epävarmuus mallinnus/validointi Havaintotaso: Puu Piste/Koeala Metsikkö/Alue Puu > kartoituksen tarkkuuden tulisi olla < 0.3 m, lokaalisti ja globaalisti Koeala > tarkkuusvaatimukseen vaikuttaa tunnusten autokorrelaatio annetulla koealakoolla, sisäistä kartoitusta ei tarvita. Y = f(x), esim. V = f(kuvapiirteet), Y = Y + ε(mittaus, sijainti, malliv.) X = X + ε(sijaintiv.,..) Kaukokartoitushavainnot 2D vai 3D? Näiden tarkkuus? Geometrinen kohina + harha MINIMOI / EVALUOI VAIKUTUS

4 Puutaso, Kun kaikki on ± kunnossa

5 Oikaisu vai orientointi? Orto oikaisu toimii vain nadirissa tai pinnanmyötaisille kohteille
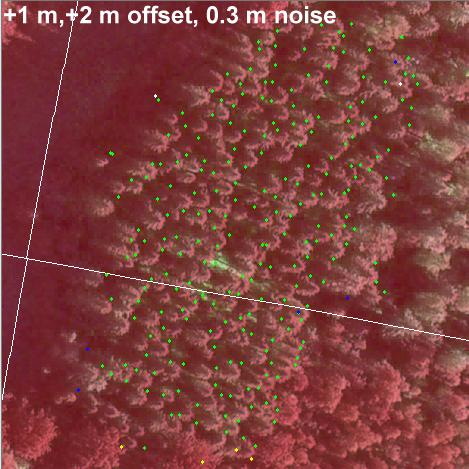
6 Maastoaineiston virheet, XY
")
")
7 Eri aineistojen geometria, XYZ Maastoaineisto, latvat, teema (h) m Maastoaineisto, latvat, teema (h) Kaksi LiDAR aineistoa, teema (Z DEM)


8 2. Vain yksi maastomittaaja 500 välineet s.e. tarkkuus on hyvä lokaalisti ja globaalisti. Hyvä SE(XY) < 0.3 m.

9 RTK paikannus taimikoissa jos puusto < 4 m ei pahoja katveita SE(X,Y,Z) < 0.1 m, 5 sek/hav 100 /pvä + muut kulut Antennin saa lähelle kohdetta GNSS Latvuston alla alhainen signaalikohinasuhde korkea #DOP monitieheijastuksia jatkuvasti muuttuva satelliittijoukko Kunnon vastaanottimella (>5000 ) ja jälkikorjauksella, SE(XY) m, pitkät havaintojaksot, satelliittisää. Antennin sijoittaminen?
10 Lokaalisti ja globaalisti tarkka kartoitus latvuston alla Kartta metsästä takymetrillä lokaalisti tarkka GPS:llä paikka ja orientaatio Yksin hankalaa, suuret tai peitteiset alat ongelmallisia. Pienet alat napakoordinaatistossa, jos laser EDM toimii. Tukipisteille GPS havaintoja N kpl. Orientoidun kartan tarkkuus on ~#/sqrt(n), jossa # on GPS:n satunnaisvirhe. Systemaattiset virheet? Paikka ja orientaatio: esim. xy = f(xy), jossa f on esimerkiksi 6 parametrinen affiini tasomuunnos, olettaen takymetrillä saadut xy koordinaatit tarkoiksi, eli OLS estimointi järjestyksessä XY=g(x,y) + ε Affiini.xls VAIHTOEHTO Jos käytössä on ilmakuvia/lidar, käytetään niiltä mitattuja puita GPS:llä mitattujen tukipisteiden korvikkeena ja kartoitetaan muu näillä tukipisteillä Fotogrammetris geodeettinen menetelmä
11 Fotogrammetris geodeettinen menetelmä Kaukokartoituspuut XYtukipisteinä. Muiden kohteiden kartoitus niiden avulla 1. Paikanna latvapisteet ilmakuvilta 2. Paikanna samat puut maastossa 3. Trilateroi ja/tai kolmioi uusia pisteitä
 Manuaalista")

12 1. Paikanna latvapisteet (ilmakuvilta/lidar) Manuaalista puoliautomaattista. Tarkkuus = f(kuvien mittakaava, lukumäärä, kuvasäteiden geometria, latvapisteen yksikäsitteisyys)

13 2. Paikanna (kiintopiste ) puut maastossa GPS:llä paikalle. Puiden identifiointi apuna ennakkoon lasketut suuntimat / etäisyydet, metsässä kolmioidaan.
 pisteeltä tunnetuille (P A ).")
14 3. Trilateroi ja/tai kolmioi uusia pisteitä Havaitse vaakaetäisyyksiä (d) ja/tai bussolisuuntia (atsimuutteja, α) tuntemattomalta (P O ) pisteeltä tunnetuille (P A ). Laske tasoituslaskulla tuntemattomien estimaatit ja virhe estimaattorit, heti kun redundanssi sallii.
15 Tasoituslaskennan matematiikkaa Tuntemattomia Uuden pisteen X 0 ja Y 0 Kiintopisteiden X A ja Y A (Bussolikorjaus, BK) Havaintoja Kiintopisteiden X A ja Y A, ε X,Y ~N(0, σ 2 ) Atsimuutit, α i, ε α ~N(0, σ α2 ) Etäisyydet, d j, ε d ~N(0, σ d2 ) (1) (4) ovat havaintoyhtälöt (ilman bussolikorjausta) Havaintoyhtälöistä lasketaan virhevektori (havaintojen poikkeamat ratkaisusta): metrejä, radiaaneja ja metrejä. Tuntemattomien arvot ratkaistaan painotetulla epälineaarisella regressiolla, tasoituslaskuna.
16 Tasoituslaskun vaiheet 6. Tarkkuusestimaattorit ja virheiden haku σ Q 0 xx = = y T Py r (A σ Xi = σ 0 T PA) 1 diag(q xx ) Keskivirheet eig(q xx ) Virhe ellipsit Ominaisvektoreista kierto Ominaisarvoista puoliakselit Q w vv j = = 1 P AQ A T σ 0 y j q j xx Karkeiden virheiden etsintä ja eliminointi
17 Verkkotasoitus!
 ja maastossa mitataan (laserrelaskoopilla) napakoordinatistossa puukartta (d, α, dbh, Sp) GPS pisteen (X")
18 Puiden identifiointi on työläs vaihe. Jos ilmakuvilta / LiDARilta on päävalta lisävalta ja välipuiden kartta (X, Y, h, Sp) ja maastossa mitataan (laserrelaskoopilla) napakoordinatistossa puukartta (d, α, dbh, Sp) GPS pisteen (X GPS,Y GPS ) ympäriltä, voidaan koealan tarkka sijainti ratkaista useimmissa tapauksissa yksikäsitteisesti: Missä ollaan mitta ( X, Y α) Y (45 m) X (45 m)

19 Yhteenveto Geometrinen kohina ja harha tulisi tuntea ja minimoida mahdollisuuksien mukaan, jos vaikutus tuloksiin (hyöty) on merkittävä. Metsä on kompleksi 3D kohde Satelliittipaikannuksen tarkkuus ei riitä puutason analyyseihin latvuston alla. Ilmakuvilla ja LiDARilla voidaan tuoda geometria lasvuston alle käyttämällä puita tukipisteinä, kunhan puut ovat sopivia. Redundanteilla mittauksilla voidaan tarkkuutta parantaa ja mitata kohteet halutulla tarkkuudella. Labra Tutkitaan (taso) trilateroinnin ja kolmioinnin perusteita simulaattorin avulla. Ohjeet tietokoneluokassa. Tutkitaan takymetrillä perustetun koelan orientointia GPS havainnoin. Affiini.xls
20 Labra. Vastaa (simulaattoria käyttäen), seuraaviin kysymyksiin Mikä on harhaisen etäisyysmittauksen vaikutus tuloksiin, Kun kiintopisteitä on kaikissa suunnissa? Kun kiintopisteitä on vain jostain puolitasosta? Miten suuntimien mukanaolo vaikuttaa? 2. Paljonko 10 asteen harha bussolissa siirtää pisteitä, Kun mukana on/ei ole etäisyyksiä? Miten kiintopisteiden geometria vaikuttaa? 3. Jos ilmakuvalta paikannettujen pisteiden koordinaattien tarkkuus on 0.3 m, Kuinka monta pelkkää suuntahavaintoa tarvitaan, jotta uusien pisteiden tarkkuus olisi 0.3 m ja miten suuntahavaintojen tarkkuus vaikuttaa määrään? Kuinka monta pelkkää etäisyyshavaintoa tarvitaan 0.3 m tarkkuuteen? 4. Tutki, kuinka tarkkaan paikannukseen bussolilla pääsee, jos kiintopisteet ovat m etäisyydellä. Jos käytössä on 0.05 m etäisyysmittari, onko 1 asteen suuntimista hyötyä? Muokkaa Affiini.xls tiedostoa ja lisää riippumattomia GPS havaintoja 16:een. (Myös Helmert muunnoksen saa toteuttaa) Tutki tarkkuutta verratuna 4:ään havaintoon. Lisää GPS havaintoihin trendi, xyharha joka muuttuu ajan mukana. Miten se vaikuttaa tarkkuuteen.
21 Labra 6. Fotogrammetris geodeettisen menetelmästä esitettiin visio versiosta, jossa kaukokartoituksella saatua puukarttaa, jossa on puille x ja y koordinaatit, puulaji ja pituustietoa, käytetään GPS:n ± 5 m virheen eliminointiin dm tasolle, kun metsässä tehdään havaintoja puista. Pohdi, minkälaiseen logiikkaan / algoritmiin tarkennus voisi perustua ja mitä ongelmia aiheutuu Kaukokartoituksen paikannusvirheistä Siitä, ettei puukartta ilmasta tai maasta ole täydellinen (esim. relaskooppi) Puuston tilajärjestyksestä Kuinka maastossa tehtyjä rungon läpimitta ja puulajihavaintoja voisi hyödyntää? 7. Sinulla on RTK GPS joka antaa taimikossa 3 cm tarkkuudella XYZ sijainnin. Tarvitset sijainnin kuitenkin noin 70 m päässä kuviorajalta varttuneen puuston alla, jossa RTK GPS ei toimi. Sinulla on bussoli ja laseretäisyysmittari. Kuinka viet tarkan XY pisteen taimikosta varttuneeseen metsään? Tee piirros + selite. Halutessasi kokeile laskentaa simulaattorin avulla.
"Karuselli", 4 kohdetta, 4 ryhmää per kohde, min. Mukana kuljetettavat ryhmäkohtaiset varusteet ja kohteella annettavat välineet.
 MARV1, 2009 KE-ip Metsikkökoeala - harjoittelu muistokoivikossa "Karuselli", 4 kohdetta, 4 ryhmää per kohde, 25 + 5 min. Mukana kuljetettavat ryhmäkohtaiset varusteet ja kohteella annettavat välineet.
MARV1, 2009 KE-ip Metsikkökoeala - harjoittelu muistokoivikossa "Karuselli", 4 kohdetta, 4 ryhmää per kohde, 25 + 5 min. Mukana kuljetettavat ryhmäkohtaiset varusteet ja kohteella annettavat välineet.
Satelliittipaikannuksen tarkkuus hakkuukoneessa. Timo Melkas Mika Salmi Jarmo Hämäläinen
 Satelliittipaikannuksen tarkkuus hakkuukoneessa Timo Melkas Mika Salmi Jarmo Hämäläinen Tavoite Tutkimuksen tavoite oli selvittää nykyisten hakkuukoneissa vakiovarusteena olevien satelliittivastaanottimien
Satelliittipaikannuksen tarkkuus hakkuukoneessa Timo Melkas Mika Salmi Jarmo Hämäläinen Tavoite Tutkimuksen tavoite oli selvittää nykyisten hakkuukoneissa vakiovarusteena olevien satelliittivastaanottimien
Mittaushavaintojen täsmällinen käsittelymenenetelmä
 Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Puukarttajärjestelmä hakkuun tehostamisessa. Timo Melkas Mikko Miettinen Jarmo Hämäläinen Kalle Einola
 Puukarttajärjestelmä hakkuun tehostamisessa Timo Melkas Mikko Miettinen Jarmo Hämäläinen Kalle Einola Tavoite Tutkimuksessa selvitettiin hakkuukoneeseen kehitetyn puukarttajärjestelmän (Optical Tree Measurement
Puukarttajärjestelmä hakkuun tehostamisessa Timo Melkas Mikko Miettinen Jarmo Hämäläinen Kalle Einola Tavoite Tutkimuksessa selvitettiin hakkuukoneeseen kehitetyn puukarttajärjestelmän (Optical Tree Measurement
TTY Mittausten koekenttä. Käyttö. Sijainti
 TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
Jos ohjeessa on jotain epäselvää, on otettava yhteys Mänttä-Vilppulan kaupungin kiinteistö- ja mittauspalveluihin.
 Kartoitusohje Johdanto Tämä ohje määrittää Mänttä-Vilppulan kaupungille tehtävien kaapelien ja putkien kartoitustyön vaatimukset sekä antaa ohjeet kartoitustyön suorittamiseen. Ohjeessa määritellään kartoituksen
Kartoitusohje Johdanto Tämä ohje määrittää Mänttä-Vilppulan kaupungille tehtävien kaapelien ja putkien kartoitustyön vaatimukset sekä antaa ohjeet kartoitustyön suorittamiseen. Ohjeessa määritellään kartoituksen
Maanmittauspäivät 2014 Seinäjoki
 Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006
 Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006 Satelliittimittauksen tulevaisuus GPS:n modernisointi, L2C, L5 GALILEO GLONASS GNSS GPS:n modernisointi L2C uusi siviilikoodi L5 uusi taajuus Block
Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006 Satelliittimittauksen tulevaisuus GPS:n modernisointi, L2C, L5 GALILEO GLONASS GNSS GPS:n modernisointi L2C uusi siviilikoodi L5 uusi taajuus Block
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta
 Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen
 Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen Mittausten laadun tarkastus ja muunnoskertoimien laskenta Kyösti Laamanen 2.0 4.10.2013 Prosito 1 (9) SISÄLTÖ 1 YLEISTÄ...
Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen Mittausten laadun tarkastus ja muunnoskertoimien laskenta Kyösti Laamanen 2.0 4.10.2013 Prosito 1 (9) SISÄLTÖ 1 YLEISTÄ...
EUREF-FIN/N2000 käyttöönotto Helsingissä
 EUREF-FIN/N2000 käyttöönotto Helsingissä http://www.hel.fi/hki/kv/fi/kaupunkimittausosasto/kartat+ja+paikkatiedot/koordinaatisto Muutokset Helsngissä: Korkeusjärjestelmä: Tasokoordinaatisto: Pohjoiskoordinaatti
EUREF-FIN/N2000 käyttöönotto Helsingissä http://www.hel.fi/hki/kv/fi/kaupunkimittausosasto/kartat+ja+paikkatiedot/koordinaatisto Muutokset Helsngissä: Korkeusjärjestelmä: Tasokoordinaatisto: Pohjoiskoordinaatti
5 syytä hyödyntää ensiluokkaista paikannustarkkuutta maastotyöskentelyssä
 5 syytä hyödyntää ensiluokkaista paikannustarkkuutta maastotyöskentelyssä Taskukokoinen, maastokelpoinen Trimble R1 GNSS -vastaanotin mahdollistaa ammattitasoisen paikkatiedonkeruun. Kun R1 yhdistetään
5 syytä hyödyntää ensiluokkaista paikannustarkkuutta maastotyöskentelyssä Taskukokoinen, maastokelpoinen Trimble R1 GNSS -vastaanotin mahdollistaa ammattitasoisen paikkatiedonkeruun. Kun R1 yhdistetään
Radiotekniikan sovelluksia
 Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
2. Metsikön puuston arviointi
 2. Metsikön puuston arviointi 2.1 Metsikkökoealaharjoituksen tavoitteet Harjoitellaan metsikön puustotunnusten määrittämistä puutunnuksiin perustuen erilaisten kiinteä- ja vaihtuvaalaisten koealojen avulla.
2. Metsikön puuston arviointi 2.1 Metsikkökoealaharjoituksen tavoitteet Harjoitellaan metsikön puustotunnusten määrittämistä puutunnuksiin perustuen erilaisten kiinteä- ja vaihtuvaalaisten koealojen avulla.
EUREF-FIN/N2000-MUUNNOKSET HELSINGIN KAUPUNGISSA
 1 (10) EUREF-FIN/N2000-MUUNNOKSET HELSINGIN KAUPUNGISSA 5.3.2012 2 (10) Sisältö: 1 Johdanto... 3 1.1 Muunnosasetukset paikkatieto-ohjelmistoissa... 3 1.2 Lisätiedot... 3 2 Korkeusjärjestelmän muunnos NN
1 (10) EUREF-FIN/N2000-MUUNNOKSET HELSINGIN KAUPUNGISSA 5.3.2012 2 (10) Sisältö: 1 Johdanto... 3 1.1 Muunnosasetukset paikkatieto-ohjelmistoissa... 3 1.2 Lisätiedot... 3 2 Korkeusjärjestelmän muunnos NN
Algoritmi I kuvioiden ja niille johtavien ajourien erottelu. Metsätehon tuloskalvosarja 7a/2018 LIITE 1 Timo Melkas Kirsi Riekki Metsäteho Oy
 Algoritmi I kuvioiden ja niille johtavien ajourien erottelu Metsätehon tuloskalvosarja 7a/2018 LIITE 1 Timo Melkas Kirsi Riekki Metsäteho Oy Algoritmi I kuvioiden ja niille johtavien ajourien erottelu
Algoritmi I kuvioiden ja niille johtavien ajourien erottelu Metsätehon tuloskalvosarja 7a/2018 LIITE 1 Timo Melkas Kirsi Riekki Metsäteho Oy Algoritmi I kuvioiden ja niille johtavien ajourien erottelu
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 4 Georeferointi
 Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Metsätehon tuloskalvosarja 9/2017 Timo Melkas Kirsi Riekki Metsäteho Oy
 Puiden paikannustarkkuus hakkuukoneen tallennettuun sijaintiin ja kouran anturointiin perustuen laskennallinen algoritmi kouran sijainnin tarkentamiseksi Metsätehon tuloskalvosarja 9/2017 Timo Melkas Kirsi
Puiden paikannustarkkuus hakkuukoneen tallennettuun sijaintiin ja kouran anturointiin perustuen laskennallinen algoritmi kouran sijainnin tarkentamiseksi Metsätehon tuloskalvosarja 9/2017 Timo Melkas Kirsi
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Estimointi. Vilkkumaa / Kuusinen 1
 Estimointi Vilkkumaa / Kuusinen 1 Motivointi Tilastollisessa tutkimuksessa oletetaan jonkin jakauman generoineen tutkimuksen kohteena olevaa ilmiötä koskevat havainnot Tämän mallina käytettävän todennäköisyysjakauman
Estimointi Vilkkumaa / Kuusinen 1 Motivointi Tilastollisessa tutkimuksessa oletetaan jonkin jakauman generoineen tutkimuksen kohteena olevaa ilmiötä koskevat havainnot Tämän mallina käytettävän todennäköisyysjakauman
Matematiikka ja teknologia, kevät 2011
 Matematiikka ja teknologia, kevät 2011 Peter Hästö 13. tammikuuta 2011 Matemaattisten tieteiden laitos Tarkoitus Kurssin tarkoituksena on tutustuttaa ja käydä läpi eräisiin teknologisiin sovelluksiin liittyvää
Matematiikka ja teknologia, kevät 2011 Peter Hästö 13. tammikuuta 2011 Matemaattisten tieteiden laitos Tarkoitus Kurssin tarkoituksena on tutustuttaa ja käydä läpi eräisiin teknologisiin sovelluksiin liittyvää
Luento 4 Georeferointi Maa Fotogrammetrian perusteet 1
 Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
MARV Metsikkökoealaharjoitus Aluepohjaiset laserpiirteet puustotunnusten selittäjinä. Ruuduille lasketut puustotunnukset:
 MARV1-11 Metsikkökoealaharjoitus Aluepohjaiset laserpiirteet puustotunnusten selittäjinä Metsikkökoealojen puuston mittaukseen käytetty menetelmä, jossa puut etsitään laseraineistosta/ilmakuvilta ja mitataan
MARV1-11 Metsikkökoealaharjoitus Aluepohjaiset laserpiirteet puustotunnusten selittäjinä Metsikkökoealojen puuston mittaukseen käytetty menetelmä, jossa puut etsitään laseraineistosta/ilmakuvilta ja mitataan
MARV Metsikkökoealaharjoitus
 MARV1 2011 - Metsikkökoealaharjoitus Ilkka Korpela, H89 Yliopistojen tehtävänä on edistää vapaata tutkimusta sekä tieteellistä ja taiteellista sivistystä, antaa tutkimukseen perustuvaa ylintä opetusta
MARV1 2011 - Metsikkökoealaharjoitus Ilkka Korpela, H89 Yliopistojen tehtävänä on edistää vapaata tutkimusta sekä tieteellistä ja taiteellista sivistystä, antaa tutkimukseen perustuvaa ylintä opetusta
ETRS89- kiintopisteistön nykyisyys ja tulevaisuus. Jyrki Puupponen Kartastoinsinööri Etelä-Suomen maanmittaustoimisto
 ETRS89- kiintopisteistön nykyisyys ja tulevaisuus Jyrki Puupponen Kartastoinsinööri Etelä-Suomen maanmittaustoimisto Valtakunnalliset kolmiomittaukset alkavat. Helsingin järjestelmä (vanha valtion järjestelmä)
ETRS89- kiintopisteistön nykyisyys ja tulevaisuus Jyrki Puupponen Kartastoinsinööri Etelä-Suomen maanmittaustoimisto Valtakunnalliset kolmiomittaukset alkavat. Helsingin järjestelmä (vanha valtion järjestelmä)
Luento 7: Fotogrammetrinen mittausprosessi
 7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
Puun kasvu ja runkomuodon muutokset
 Puun kasvu ja runkomuodon muutokset Laserkeilaus metsätieteissä 6.10.2017 Ville Luoma Helsingin yliopisto Centre of Excellence in Laser Scanning Research Taustaa Päätöksentekijät tarvitsevat tarkkaa tietoa
Puun kasvu ja runkomuodon muutokset Laserkeilaus metsätieteissä 6.10.2017 Ville Luoma Helsingin yliopisto Centre of Excellence in Laser Scanning Research Taustaa Päätöksentekijät tarvitsevat tarkkaa tietoa
JHS-suositus(luonnos): Kiintopistemittaus EUREF-FIN koordinaattijärjestelmässä
: Kiintopistemittaus EUREF-FIN koordinaattijärjestelmässä") JHS-suositus(luonnos): Kiintopistemittaus EUREF-FIN koordinaattijärjestelmässä EUREF-II -päivä 2012 Marko Ollikainen Kehittämiskeskus Maanmittauslaitos MAANMITTAUSLAITOS TIETOA MAASTA Mittausohjeiden uudistamisesta
JHS-suositus(luonnos): Kiintopistemittaus EUREF-FIN koordinaattijärjestelmässä EUREF-II -päivä 2012 Marko Ollikainen Kehittämiskeskus Maanmittauslaitos MAANMITTAUSLAITOS TIETOA MAASTA Mittausohjeiden uudistamisesta
Luento 11: Stereomallin ulkoinen orientointi
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Satelliittipaikannuksen perusteet
 Satelliittipaikannuksen perusteet 21.02.2018 Koulutuskeskus Sedu, Ilmajoki Satelliittipaikannus tarkoittaa vastaanottimen sijainninmääritystä satelliittijärjestelmien lähettämien radiosignaalien perusteella.
Satelliittipaikannuksen perusteet 21.02.2018 Koulutuskeskus Sedu, Ilmajoki Satelliittipaikannus tarkoittaa vastaanottimen sijainninmääritystä satelliittijärjestelmien lähettämien radiosignaalien perusteella.
Metsävaratieto ja sen käytön mahdollisuudet. 4.12.2014 Raito Paananen Metsätietopäällikkö Suomen metsäkeskus Julkiset palvelut, Keski-Suomi
 Metsävaratieto ja sen käytön mahdollisuudet 4.12.2014 Raito Paananen Metsätietopäällikkö Suomen metsäkeskus Julkiset palvelut, Keski-Suomi Sisältö 1. Julkisin varoin kerättävien metsävaratietojen keruun
Metsävaratieto ja sen käytön mahdollisuudet 4.12.2014 Raito Paananen Metsätietopäällikkö Suomen metsäkeskus Julkiset palvelut, Keski-Suomi Sisältö 1. Julkisin varoin kerättävien metsävaratietojen keruun
Metsäkoneiden sensoritekniikka kehittyy. Heikki Hyyti, Aalto-yliopisto
 Metsäkoneiden sensoritekniikka kehittyy, Metsäkoneiden sensoritekniikka kehittyy Miksi uutta sensoritekniikkaa? Tarkka paikkatieto metsässä Metsäkoneen ja puomin asennon mittaus Konenäkö Laserkeilaus Tietolähteiden
Metsäkoneiden sensoritekniikka kehittyy, Metsäkoneiden sensoritekniikka kehittyy Miksi uutta sensoritekniikkaa? Tarkka paikkatieto metsässä Metsäkoneen ja puomin asennon mittaus Konenäkö Laserkeilaus Tietolähteiden
Korkeusjärjestelmän muutos ja niiden sijoittuminen tulevaisuuteen
 Rakennusvalvontamittaus 15.02.2010-> Korkeusjärjestelmän muutos ja niiden sijoittuminen tulevaisuuteen Ongelmat suurimmillaan parin vuoden kuluttua, kun maastossa on yhtä paljon uuden korkeusjärjestelmän
Rakennusvalvontamittaus 15.02.2010-> Korkeusjärjestelmän muutos ja niiden sijoittuminen tulevaisuuteen Ongelmat suurimmillaan parin vuoden kuluttua, kun maastossa on yhtä paljon uuden korkeusjärjestelmän
Luento 10: Optinen 3-D mittaus ja laserkeilaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Luento 8: Kolmiointi AIHEITA. Kolmiointi. Maa-57.301 Fotogrammetrian yleiskurssi. Luento-ohjelma 1 2 3 4 5 6 7 8 9 10
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Tiheäpulssinen ja monikanavainen laserkeilausaineisto puulajeittaisessa inventoinnissa
 Metsätieto ja sähköiset palvelut -hankkeen lopputulosseminaari Helsinki, 22.1.2019 Tiheäpulssinen ja monikanavainen laserkeilausaineisto puulajeittaisessa inventoinnissa Petteri Packalen, Eetu Kotivuori,
Metsätieto ja sähköiset palvelut -hankkeen lopputulosseminaari Helsinki, 22.1.2019 Tiheäpulssinen ja monikanavainen laserkeilausaineisto puulajeittaisessa inventoinnissa Petteri Packalen, Eetu Kotivuori,
Markku.Poutanen@fgi.fi
 Global Navigation Satellite Systems GNSS Markku.Poutanen@fgi.fi Kirjallisuutta Poutanen: GPS paikanmääritys, Ursa HUOM: osin vanhentunut, ajantasaistukseen luennolla ilmoitettava materiaali (erit. suomalaiset
Global Navigation Satellite Systems GNSS Markku.Poutanen@fgi.fi Kirjallisuutta Poutanen: GPS paikanmääritys, Ursa HUOM: osin vanhentunut, ajantasaistukseen luennolla ilmoitettava materiaali (erit. suomalaiset
Uusi koordinaatti- ja korkeusjärjestelmä
 Uusi koordinaatti- ja korkeusjärjestelmä Markku Poutanen Geodeettinen laitos Uusi koordinaatti- ja korkeusjärjestelmä Taustaa Uuden koordinaattijärjestelmän perusteet JHS ja käyttöönotto Uusi korkeusjärjestelmä
Uusi koordinaatti- ja korkeusjärjestelmä Markku Poutanen Geodeettinen laitos Uusi koordinaatti- ja korkeusjärjestelmä Taustaa Uuden koordinaattijärjestelmän perusteet JHS ja käyttöönotto Uusi korkeusjärjestelmä
17. Differentiaaliyhtälösysteemien laadullista teoriaa.
 99 17. Differentiaaliyhtälösysteemien laadullista teoriaa. Differentiaaliyhtälön x'(t) = f(x(t),t), x(t) n määrittelemän systeemin sanotaan olevan autonominen, jos oikea puoli ei eksplisiittisesti riipu
99 17. Differentiaaliyhtälösysteemien laadullista teoriaa. Differentiaaliyhtälön x'(t) = f(x(t),t), x(t) n määrittelemän systeemin sanotaan olevan autonominen, jos oikea puoli ei eksplisiittisesti riipu
Laserkeilaus yksityismetsien inventoinnissa
 Kuvat Arbonaut Oy Laserkeilaus yksityismetsien inventoinnissa Laserkeilaus ja korkeusmallit Maanmittauslaitoksen seminaari 9.10.2009 Juho Heikkilä Metsätalouden kehittämiskeskus Tapio Sisältö Kuva Metla
Kuvat Arbonaut Oy Laserkeilaus yksityismetsien inventoinnissa Laserkeilaus ja korkeusmallit Maanmittauslaitoksen seminaari 9.10.2009 Juho Heikkilä Metsätalouden kehittämiskeskus Tapio Sisältö Kuva Metla
Laserkokeiluja Hyytiälän metsissä ja soilla
 Laserkokeiluja Hyytiälän metsissä ja soilla 2004-2010 Ilkka Korpela (HY, ISY) ilkka.korpela@helsinki.fi www.helsinki.fi/~korpela MML laserkeilausseminaari 8.10.2010 Jukka Laine Sisältö Hyytiälä Sijainti,
Laserkokeiluja Hyytiälän metsissä ja soilla 2004-2010 Ilkka Korpela (HY, ISY) ilkka.korpela@helsinki.fi www.helsinki.fi/~korpela MML laserkeilausseminaari 8.10.2010 Jukka Laine Sisältö Hyytiälä Sijainti,
Numeeriset menetelmät
 Numeeriset menetelmät Luento 6 To 22.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 6 To 22.9.2011 p. 1/38 p. 1/38 Ominaisarvotehtävät Monet sovellukset johtavat ominaisarvotehtäviin Yksi
Numeeriset menetelmät Luento 6 To 22.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 6 To 22.9.2011 p. 1/38 p. 1/38 Ominaisarvotehtävät Monet sovellukset johtavat ominaisarvotehtäviin Yksi
GPS:n käyttö pinta-alan mittauksessa
 Osakkaiden yhteishanke GPS:n käyttö pinta-alan mittauksessa Pikatesti kahdella GPS-laitteella Timo Hokka Metsätehon raportti 98 10.10.2000 GPS:n käyttö pinta-alan mittauksessa Pikatesti kahdella GPS-laitteella
Osakkaiden yhteishanke GPS:n käyttö pinta-alan mittauksessa Pikatesti kahdella GPS-laitteella Timo Hokka Metsätehon raportti 98 10.10.2000 GPS:n käyttö pinta-alan mittauksessa Pikatesti kahdella GPS-laitteella
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
GPS:n käyttö suunnistuskartoituksessa
 GPS:n käyttö suunnistuskartoituksessa SSL karttapäivä 16.2.2008, Varala Esa Toivonen, TarpS 30 vuotta IT systeemien parissa opiskelun ja työn merkeissä 25 vuotta harrastuksena suunnistus, 83 Epilän Esa,
GPS:n käyttö suunnistuskartoituksessa SSL karttapäivä 16.2.2008, Varala Esa Toivonen, TarpS 30 vuotta IT systeemien parissa opiskelun ja työn merkeissä 25 vuotta harrastuksena suunnistus, 83 Epilän Esa,
MS-C1340 Lineaarialgebra ja
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Matriisinormi, häiriöalttius Riikka Kangaslampi Kevät 2017 Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Matriisinormi Matriisinormi Matriiseille
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Matriisinormi, häiriöalttius Riikka Kangaslampi Kevät 2017 Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Matriisinormi Matriisinormi Matriiseille
TURKU. http://fi.wikipedia.org/wiki/turku
 Turun kaupungin maastomittauspalvelut ja koordinaaattijärjestelmän vaihto käytännössä Tampereen seutukunnan maanmittauspäivät Ikaalisten kylpylässä 17.-18.3.2010, Harri Kottonen Kuka Harri Kottonen, Mittaustyöpäällikkö
Turun kaupungin maastomittauspalvelut ja koordinaaattijärjestelmän vaihto käytännössä Tampereen seutukunnan maanmittauspäivät Ikaalisten kylpylässä 17.-18.3.2010, Harri Kottonen Kuka Harri Kottonen, Mittaustyöpäällikkö
Biomassatulkinta LiDARilta
 Biomassatulkinta LiDARilta 1 Biomassatulkinta LiDARilta Jarno Hämäläinen (MMM) Kestävän kehityksen metsävarapalveluiden yksikkö (REDD and Sustainable Forestry Services) 2 Sisältö Referenssit Johdanto Mikä
Biomassatulkinta LiDARilta 1 Biomassatulkinta LiDARilta Jarno Hämäläinen (MMM) Kestävän kehityksen metsävarapalveluiden yksikkö (REDD and Sustainable Forestry Services) 2 Sisältö Referenssit Johdanto Mikä
RAPORTTI 04013522 12lUMVl2001. Urpo Vihreäpuu. Jakelu. OKMElOutokumpu 2 kpl PAMPALON RTK-KIINTOPISTEET. Sijainti 1:50 000. Avainsanat: RTK-mittaus
 RAPORTTI 04013522 12lUMVl2001 Urpo Vihreäpuu Jakelu OKMElOutokumpu 2 kpl PAMPALON RTK-KIINTOPISTEET - 4333 07 Sijainti 1:50 000 Avainsanat: RTK-mittaus OUTOKUMPU MINING OY Mairninetsnnta RAPORTTI 04013522
RAPORTTI 04013522 12lUMVl2001 Urpo Vihreäpuu Jakelu OKMElOutokumpu 2 kpl PAMPALON RTK-KIINTOPISTEET - 4333 07 Sijainti 1:50 000 Avainsanat: RTK-mittaus OUTOKUMPU MINING OY Mairninetsnnta RAPORTTI 04013522
Paikannuksen matematiikka MAT
 TA M P E R E U N I V E R S I T Y O F T E C H N O L O G Y M a t h e m a t i c s Paikannuksen matematiikka MAT-45800 4..008. p.1/4 Käytännön järjestelyt Kotisivu: http://math.tut.fi/courses/mat-45800/ Luennot:
TA M P E R E U N I V E R S I T Y O F T E C H N O L O G Y M a t h e m a t i c s Paikannuksen matematiikka MAT-45800 4..008. p.1/4 Käytännön järjestelyt Kotisivu: http://math.tut.fi/courses/mat-45800/ Luennot:
Tehtävä 1. Jatka loogisesti oheisia jonoja kahdella seuraavaksi tulevalla termillä. Perustele vastauksesi
 Tehtävä. Jatka loogisesti oheisia jonoja kahdella seuraavaksi tulevalla termillä. Perustele vastauksesi lyhyesti. a) a, c, e, g, b),,, 7,, Ratkaisut: a) i ja k - oikea perustelu ja oikeat kirjaimet, annetaan
Tehtävä. Jatka loogisesti oheisia jonoja kahdella seuraavaksi tulevalla termillä. Perustele vastauksesi lyhyesti. a) a, c, e, g, b),,, 7,, Ratkaisut: a) i ja k - oikea perustelu ja oikeat kirjaimet, annetaan
ENERGIAPUUKOHTEEN TUNNISTAMINEN JA OHJAAMINEN MARKKINOILLE
 ENERGIAPUUKOHTEEN TUNNISTAMINEN JA OHJAAMINEN MARKKINOILLE METSÄ metsänomistajat PROMOOTTORI metsäsuunnittelu ja -neuvonta MARKKINAT polttopuu- ja lämpöyrittäjät metsäpalveluyrittäjät energiayhtiöt metsänhoitoyhdistykset
ENERGIAPUUKOHTEEN TUNNISTAMINEN JA OHJAAMINEN MARKKINOILLE METSÄ metsänomistajat PROMOOTTORI metsäsuunnittelu ja -neuvonta MARKKINAT polttopuu- ja lämpöyrittäjät metsäpalveluyrittäjät energiayhtiöt metsänhoitoyhdistykset
Muutoksen arviointi differentiaalin avulla
 Muutoksen arviointi differentiaalin avulla y y = f (x) y = f (x + x) f (x) dy y dy = f (x) x x x x x + x Luento 7 1 of 15 Matematiikan ja tilastotieteen laitos Turun yliopisto Muutoksen arviointi differentiaalin
Muutoksen arviointi differentiaalin avulla y y = f (x) y = f (x + x) f (x) dy y dy = f (x) x x x x x + x Luento 7 1 of 15 Matematiikan ja tilastotieteen laitos Turun yliopisto Muutoksen arviointi differentiaalin
Suomen metsäkeskus. SMK:n ja VMI:n inventointien yhteistyömahdollisuuksia. Taksaattoriklubin kevätseminaari Helsinki, 20.3.
 Suomen metsäkeskus SMK:n ja VMI:n inventointien yhteistyömahdollisuuksia Taksaattoriklubin kevätseminaari Helsinki, 20.3.2015 Juho Heikkilä Sisältöä 1. SMK:n metsävaratiedosta lyhyesti 2. VMI-SMK yhteistyön
Suomen metsäkeskus SMK:n ja VMI:n inventointien yhteistyömahdollisuuksia Taksaattoriklubin kevätseminaari Helsinki, 20.3.2015 Juho Heikkilä Sisältöä 1. SMK:n metsävaratiedosta lyhyesti 2. VMI-SMK yhteistyön
Maastomallit ympäristö- ja maanrakennusalan suunnittelussa
 Maastomallit ympäristö- ja maanrakennusalan suunnittelussa timo takala, luento teknillisen korkeakoulun arkkitehtiosastolla, kadut ja aukiot kurssi 12.12.2006 Maastomalli = tietokoneelle luotu kolmiulotteinen
Maastomallit ympäristö- ja maanrakennusalan suunnittelussa timo takala, luento teknillisen korkeakoulun arkkitehtiosastolla, kadut ja aukiot kurssi 12.12.2006 Maastomalli = tietokoneelle luotu kolmiulotteinen
OUTOKUMPU OY 0 K MALMINETSINTA
 Q OUTOKUMPU OY 0 K MALMINETSINTA TUTKIMUSRUNGON MITTAUS SUOMUSSALMEN AITTOJARVELLA Vanha lin joitus Alueella oli tavanomainen geofysikaalisia mittauksia varten tehty linjoitus, johon myös kairaus on sidottu.
Q OUTOKUMPU OY 0 K MALMINETSINTA TUTKIMUSRUNGON MITTAUS SUOMUSSALMEN AITTOJARVELLA Vanha lin joitus Alueella oli tavanomainen geofysikaalisia mittauksia varten tehty linjoitus, johon myös kairaus on sidottu.
Olvassuon luonnonpuiston paloselvitys Selvitys: Olvassuon alueen metsäpalohistoriasta huhtikuussa 2003
 Olvassuon luonnonpuiston paloselvitys Selvitys: Olvassuon alueen metsäpalohistoriasta huhtikuussa 2003 Hannu Herva ja Rauno Ovaskainen, Metsäntutkimuslaitos Kolarin Tutkimusasema Kansikuva Olvassuon luonnonpuisto.
Olvassuon luonnonpuiston paloselvitys Selvitys: Olvassuon alueen metsäpalohistoriasta huhtikuussa 2003 Hannu Herva ja Rauno Ovaskainen, Metsäntutkimuslaitos Kolarin Tutkimusasema Kansikuva Olvassuon luonnonpuisto.
Riistapäivät 2015 Markus Melin Itä Suomen Yliopisto Metsätieteiden osasto markus.melin@uef.fi
 Riistapäivät 2015 Markus Melin Itä Suomen Yliopisto Metsätieteiden osasto markus.melin@uef.fi Laserkeilaus pähkinänkuoressa Aktiivista kaukokartoitusta, joka tuottaa 3D aineistoa (vrt. satelliitti- ja
Riistapäivät 2015 Markus Melin Itä Suomen Yliopisto Metsätieteiden osasto markus.melin@uef.fi Laserkeilaus pähkinänkuoressa Aktiivista kaukokartoitusta, joka tuottaa 3D aineistoa (vrt. satelliitti- ja
Laitetekniset vaatimukset ammattimaiselle dronetoiminnalle. Sakari Mäenpää
 Laitetekniset vaatimukset ammattimaiselle dronetoiminnalle Sakari Mäenpää Lopputulokseen vaikuttavat tekijät Kalusto Olosuhteet Ammattitaito Kuvauskohde Hyvä suunnitelma = onnistunut lopputulos Olosuhteet,
Laitetekniset vaatimukset ammattimaiselle dronetoiminnalle Sakari Mäenpää Lopputulokseen vaikuttavat tekijät Kalusto Olosuhteet Ammattitaito Kuvauskohde Hyvä suunnitelma = onnistunut lopputulos Olosuhteet,
JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit
 JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit Versio: 1.0 Julkaistu: 6.9.2019 Voimassaoloaika: toistaiseksi 1 FIN2005N00 1.1 Mallin luonti ja tarkkuus FIN2005N00 on korkeusmuunnospinta,
JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit Versio: 1.0 Julkaistu: 6.9.2019 Voimassaoloaika: toistaiseksi 1 FIN2005N00 1.1 Mallin luonti ja tarkkuus FIN2005N00 on korkeusmuunnospinta,
VMI-koealatiedon ja laserkeilausaineiston yhdistäminen metsäsuunnittelua varten
 VMI-koealatiedon ja laserkeilausaineiston yhdistäminen metsäsuunnittelua varten Kuortaneen metsäsuunnitteluseminaari 10.09.2007 Aki Suvanto, Joensuun yliopisto Petteri Packalén, Joensuun yliopisto Matti
VMI-koealatiedon ja laserkeilausaineiston yhdistäminen metsäsuunnittelua varten Kuortaneen metsäsuunnitteluseminaari 10.09.2007 Aki Suvanto, Joensuun yliopisto Petteri Packalén, Joensuun yliopisto Matti
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.
 Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
2. Uskottavuus ja informaatio
 2. Uskottavuus ja informaatio Aluksi käsittelemme uskottavuus- ja log-uskottavuusfunktioita Seuraavaksi esittelemme suurimman uskottavuuden estimointimenetelmän Ensi viikolla perehdymme aiheeseen lisääkö
2. Uskottavuus ja informaatio Aluksi käsittelemme uskottavuus- ja log-uskottavuusfunktioita Seuraavaksi esittelemme suurimman uskottavuuden estimointimenetelmän Ensi viikolla perehdymme aiheeseen lisääkö
Stereopaikannusjärjestelmän tarkkuus (3 op)
") Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Korjuujäljen seuranta energiapuun korjuun laadun mittarina. Mikko Korhonen Suomen metsäkeskus 23.5.2014
 Korjuujäljen seuranta energiapuun korjuun laadun mittarina Mikko Korhonen Suomen metsäkeskus 23.5.2014 Mitä on korjuujälki? Metsikön puuston ja maaperän tila puunkorjuun jälkeen. 2 23.5.2014 3 Korjuujäljen
Korjuujäljen seuranta energiapuun korjuun laadun mittarina Mikko Korhonen Suomen metsäkeskus 23.5.2014 Mitä on korjuujälki? Metsikön puuston ja maaperän tila puunkorjuun jälkeen. 2 23.5.2014 3 Korjuujäljen
Laserkeilaus puustotunnusten arvioinnissa
 Uusi Teknologia mullistaa puun mittauksen Metsäpäivät 7.11.2008 Laserkeilaus puustotunnusten arvioinnissa Markus Holopainen Helsingin yliopisto Metsävarojen käytön laitos markus.holopainen@helsinki.fi
Uusi Teknologia mullistaa puun mittauksen Metsäpäivät 7.11.2008 Laserkeilaus puustotunnusten arvioinnissa Markus Holopainen Helsingin yliopisto Metsävarojen käytön laitos markus.holopainen@helsinki.fi
Sovellettu todennäköisyyslaskenta B
 Sovellettu todennäköisyyslaskenta B Antti Rasila 30. lokakuuta 2007 Antti Rasila () TodB 30. lokakuuta 2007 1 / 23 1 Otos ja otosjakaumat (jatkoa) Frekvenssi ja suhteellinen frekvenssi Frekvenssien odotusarvo
Sovellettu todennäköisyyslaskenta B Antti Rasila 30. lokakuuta 2007 Antti Rasila () TodB 30. lokakuuta 2007 1 / 23 1 Otos ja otosjakaumat (jatkoa) Frekvenssi ja suhteellinen frekvenssi Frekvenssien odotusarvo
Puustotietojen keruun tekniset vaihtoehdot, kustannustehokkuus ja tarkkuus
 Puustotietojen keruun tekniset vaihtoehdot, kustannustehokkuus ja tarkkuus Janne Uuttera Metsätehon seminaari 8.5.2007 Metsävaratietojärjestelmien tulevaisuus Tausta Tietojohtamisen välineissä, kuten metsävaratietojärjestelmissä,
Puustotietojen keruun tekniset vaihtoehdot, kustannustehokkuus ja tarkkuus Janne Uuttera Metsätehon seminaari 8.5.2007 Metsävaratietojärjestelmien tulevaisuus Tausta Tietojohtamisen välineissä, kuten metsävaratietojärjestelmissä,
Virhearviointi. Fysiikassa on tärkeää tietää tulosten tarkkuus.
 Virhearviointi Fysiikassa on tärkeää tietää tulosten tarkkuus. Virhelajit A. Tilastolliset virheet= satunnaisvirheet, joita voi arvioida tilastollisin menetelmin B. Systemaattiset virheet = virheet, joita
Virhearviointi Fysiikassa on tärkeää tietää tulosten tarkkuus. Virhelajit A. Tilastolliset virheet= satunnaisvirheet, joita voi arvioida tilastollisin menetelmin B. Systemaattiset virheet = virheet, joita
Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta
 Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta Sanna Kaasalainen Kaukokartoituksen ja Fotogrammetrian Osasto Ilmastonmuutos ja ääriarvot 13.9.2012 Ympäristön Aktiivinen
Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta Sanna Kaasalainen Kaukokartoituksen ja Fotogrammetrian Osasto Ilmastonmuutos ja ääriarvot 13.9.2012 Ympäristön Aktiivinen
Access. Käyttöturva. Rahoitus. Assistant. Paikkatieto. VRSnet. GIS-mobiilipalvelut
 Access Käyttöturva Rahoitus Assistant VRSnet Paikkatieto GIS-mobiilipalvelut Mittaustiedon hallinta Trimble Access Tuo maasto ja toimisto lähemmäksi toisiaan Trimble Access Joustava tiedon jakaminen Toimistosta
Access Käyttöturva Rahoitus Assistant VRSnet Paikkatieto GIS-mobiilipalvelut Mittaustiedon hallinta Trimble Access Tuo maasto ja toimisto lähemmäksi toisiaan Trimble Access Joustava tiedon jakaminen Toimistosta
Sovellettu todennäköisyyslaskenta B
 Sovellettu todennäköisyyslaskenta B Antti Rasila 30. marraskuuta 2007 Antti Rasila () TodB 30. marraskuuta 2007 1 / 19 1 Lineaarinen regressiomalli ja suurimman uskottavuuden menetelmä Minimin löytäminen
Sovellettu todennäköisyyslaskenta B Antti Rasila 30. marraskuuta 2007 Antti Rasila () TodB 30. marraskuuta 2007 1 / 19 1 Lineaarinen regressiomalli ja suurimman uskottavuuden menetelmä Minimin löytäminen
Ryhmät & uudet mahdollisuudet
 www.terrasolid.com Ryhmät & uudet mahdollisuudet Arttu Soininen 22.08.2017 Uudet mahdollisuudet ryhmien avulla Parempi maanpinnan yläpuolisten kohteiden luokittelu Maanpäällisten kohteiden luokittelu toimii
www.terrasolid.com Ryhmät & uudet mahdollisuudet Arttu Soininen 22.08.2017 Uudet mahdollisuudet ryhmien avulla Parempi maanpinnan yläpuolisten kohteiden luokittelu Maanpäällisten kohteiden luokittelu toimii
Maastokartta pistepilvenä Harri Kaartinen, Maanmittauspäivät
 Maastokartta pistepilvenä 22.3.2018 Harri Kaartinen, Maanmittauspäivät 2018 1 Sisältö Pistepilvi aineistolähteenä Aineiston keruu Aineistojen yhdistäminen ja käsittely Sovellukset 22.3.2018 Harri Kaartinen,
Maastokartta pistepilvenä 22.3.2018 Harri Kaartinen, Maanmittauspäivät 2018 1 Sisältö Pistepilvi aineistolähteenä Aineiston keruu Aineistojen yhdistäminen ja käsittely Sovellukset 22.3.2018 Harri Kaartinen,
1. Tutkitaan regressiomallia Y i = β 0 + β 1 X i + u i ja oletetaan, että tavanomaiset
 TA7, Ekonometrian johdantokurssi HARJOITUS 7 RATKAISUEHDOTUKSET 16.3.2015 1. Tutkitaan regressiomallia Y i = β 0 + X i + u i ja oletetaan, että tavanomaiset regressiomallin oletukset pätevät (Key Concept
TA7, Ekonometrian johdantokurssi HARJOITUS 7 RATKAISUEHDOTUKSET 16.3.2015 1. Tutkitaan regressiomallia Y i = β 0 + X i + u i ja oletetaan, että tavanomaiset regressiomallin oletukset pätevät (Key Concept
EUREF ja GPS. Matti Ollikainen Geodeettinen laitos. EUREF-päivä 29.1.2004 Teknillinen korkeakoulu Espoo
 EUREF ja GPS Matti Ollikainen Geodeettinen laitos EUREF-päivä 29.1.2004 Teknillinen korkeakoulu Espoo Kuinka EUREF sai alkunsa? EUREF (European Reference Frame) o Perustettiin Kansainvälisen geodeettisen
EUREF ja GPS Matti Ollikainen Geodeettinen laitos EUREF-päivä 29.1.2004 Teknillinen korkeakoulu Espoo Kuinka EUREF sai alkunsa? EUREF (European Reference Frame) o Perustettiin Kansainvälisen geodeettisen
Luento 3: Kuvahavainnot
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Harjoitus 7: NCSS - Tilastollinen analyysi
 Harjoitus 7: NCSS - Tilastollinen analyysi Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tilastollinen testaus Testaukseen
Harjoitus 7: NCSS - Tilastollinen analyysi Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tilastollinen testaus Testaukseen
Harha mallin arvioinnissa
 Esitelmä 12 Antti Toppila sivu 1/18 Optimointiopin seminaari Syksy 2010 Harha mallin arvioinnissa Antti Toppila 13.10.2010 Esitelmä 12 Antti Toppila sivu 2/18 Optimointiopin seminaari Syksy 2010 Sisältö
Esitelmä 12 Antti Toppila sivu 1/18 Optimointiopin seminaari Syksy 2010 Harha mallin arvioinnissa Antti Toppila 13.10.2010 Esitelmä 12 Antti Toppila sivu 2/18 Optimointiopin seminaari Syksy 2010 Sisältö
Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos
 Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Malinen/Vesanen MS-A0205/6 Differentiaali- ja integraalilaskenta 2, kevät 2017 Laskuharjoitus 4A (Vastaukset) alkuviikolla
Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Malinen/Vesanen MS-A0205/6 Differentiaali- ja integraalilaskenta 2, kevät 2017 Laskuharjoitus 4A (Vastaukset) alkuviikolla
6. Differentiaaliyhtälösysteemien laadullista teoriaa.
 1 MAT-13450 LAAJA MATEMATIIKKA 5 Tampereen teknillinen yliopisto Risto Silvennoinen Kevät 2010 6. Differentiaaliyhtälösysteemien laadullista teoriaa. Olemme keskittyneet tässä kurssissa ensimmäisen kertaluvun
1 MAT-13450 LAAJA MATEMATIIKKA 5 Tampereen teknillinen yliopisto Risto Silvennoinen Kevät 2010 6. Differentiaaliyhtälösysteemien laadullista teoriaa. Olemme keskittyneet tässä kurssissa ensimmäisen kertaluvun
Miehittämättömän lennokin ottamien ilmakuvien käyttö energiakäyttöön soveltuvien biomassojen määrän nopeassa arvioinnissa
 Miehittämättömän lennokin ottamien ilmakuvien käyttö energiakäyttöön soveltuvien biomassojen määrän nopeassa arvioinnissa Anna Lopatina, Itä-Suomen yliopisto, Metsätieteiden osasto, Anna.lopatina@uef.fi
Miehittämättömän lennokin ottamien ilmakuvien käyttö energiakäyttöön soveltuvien biomassojen määrän nopeassa arvioinnissa Anna Lopatina, Itä-Suomen yliopisto, Metsätieteiden osasto, Anna.lopatina@uef.fi
Maximum likelihood-estimointi Alkeet
 Maximum likelihood-estimointi Alkeet Keijo Ruotsalainen Oulun yliopisto, Teknillinen tiedekunta Matematiikan jaos Maximum likelihood-estimointi p.1/20 Maximum Likelihood-estimointi satunnaismuuttujan X
Maximum likelihood-estimointi Alkeet Keijo Ruotsalainen Oulun yliopisto, Teknillinen tiedekunta Matematiikan jaos Maximum likelihood-estimointi p.1/20 Maximum Likelihood-estimointi satunnaismuuttujan X
Luento 5. Stereomittauksen tarkkuus Maa Fotogrammetrian perusteet 1
 Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
1 = radiaania. MARV Metsikkökoeala Harjoitus pihapiirissä. Kulku bussolin ohjaamana: Tavoitteista
 MARV1-2011 Metsikkökoeala Harjoitus pihapiirissä Tavoitteista Metsikkökoealaharjoituksen ensisijainen tavoite on oppia käyttämään erilaisia koealoja, puumittauksia, koepuuotantaa ja puumalleja puustotunnusten
MARV1-2011 Metsikkökoeala Harjoitus pihapiirissä Tavoitteista Metsikkökoealaharjoituksen ensisijainen tavoite on oppia käyttämään erilaisia koealoja, puumittauksia, koepuuotantaa ja puumalleja puustotunnusten
Metsien kaukokartoitus ja avoimet aineistot
 Geoinformatiikan valtakunnallinen tutkimuspäivä 2013 Metsien kaukokartoitus ja avoimet aineistot Sakari Tuominen, MMT METLA Valtakunnan metsien inventointi Metsäntutkimuslaitos Skogsforskningsinstitutet
Geoinformatiikan valtakunnallinen tutkimuspäivä 2013 Metsien kaukokartoitus ja avoimet aineistot Sakari Tuominen, MMT METLA Valtakunnan metsien inventointi Metsäntutkimuslaitos Skogsforskningsinstitutet
Tilastollinen aineisto Luottamusväli
 Tilastollinen aineisto Luottamusväli Keijo Ruotsalainen Oulun yliopisto, Teknillinen tiedekunta Matematiikan jaos Tilastollinen aineisto p.1/20 Johdanto Kokeellisessa tutkimuksessa tutkittavien suureiden
Tilastollinen aineisto Luottamusväli Keijo Ruotsalainen Oulun yliopisto, Teknillinen tiedekunta Matematiikan jaos Tilastollinen aineisto p.1/20 Johdanto Kokeellisessa tutkimuksessa tutkittavien suureiden
Harjoitustyö 3. Heiluri-vaunusysteemin parametrien estimointi
 Aalto-yliopiston perustieteiden korkeakoulu Systeemianalyysin laboratorio Mat-2.4129 Systeemien identifiointi Harjoitustyö 3 Heiluri-vaunusysteemin parametrien estimointi Yleistä Systeemianalyysin laboratoriossa
Aalto-yliopiston perustieteiden korkeakoulu Systeemianalyysin laboratorio Mat-2.4129 Systeemien identifiointi Harjoitustyö 3 Heiluri-vaunusysteemin parametrien estimointi Yleistä Systeemianalyysin laboratoriossa
Regressioanalyysi. Vilkkumaa / Kuusinen 1
 Regressioanalyysi Vilkkumaa / Kuusinen 1 Regressioanalyysin idea ja tavoitteet Regressioanalyysin idea: Halutaan selittää selitettävän muuttujan havaittujen arvojen vaihtelua selittävien muuttujien havaittujen
Regressioanalyysi Vilkkumaa / Kuusinen 1 Regressioanalyysin idea ja tavoitteet Regressioanalyysin idea: Halutaan selittää selitettävän muuttujan havaittujen arvojen vaihtelua selittävien muuttujien havaittujen
Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos
 Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Malinen/Ojalammi MS-A0203 Differentiaali- ja integraalilaskenta 2, kevät 2016 Laskuharjoitus 4A (Vastaukset) alkuviikolla
Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Malinen/Ojalammi MS-A0203 Differentiaali- ja integraalilaskenta 2, kevät 2016 Laskuharjoitus 4A (Vastaukset) alkuviikolla
Laserkeilauspohjaiset laskentasovellukset
 Laserkeilauspohjaiset laskentasovellukset Petteri Packalén Matti Maltamo Laseraineiston käsittely: Ohjelmistot, formaatit ja standardit Ei kovin monia ohjelmia laserpisteaineiston käsittelyyn» Terrasolid
Laserkeilauspohjaiset laskentasovellukset Petteri Packalén Matti Maltamo Laseraineiston käsittely: Ohjelmistot, formaatit ja standardit Ei kovin monia ohjelmia laserpisteaineiston käsittelyyn» Terrasolid
EUREF-FIN JA KORKEUDET. Pasi Häkli Geodeettinen laitos 10.3.2010
 EUREF-FIN JA KORKEUDET Pasi Häkli Geodeettinen laitos 10.3.2010 EUREF-FIN:n joitain pääominaisuuksia ITRF96-koordinaatiston kautta globaalin koordinaattijärjestelmän paikallinen/kansallinen realisaatio
EUREF-FIN JA KORKEUDET Pasi Häkli Geodeettinen laitos 10.3.2010 EUREF-FIN:n joitain pääominaisuuksia ITRF96-koordinaatiston kautta globaalin koordinaattijärjestelmän paikallinen/kansallinen realisaatio
805306A Johdatus monimuuttujamenetelmiin, 5 op
 monimuuttujamenetelmiin, 5 op syksy 2018 Matemaattisten tieteiden laitos Lineaarinen erotteluanalyysi (LDA, Linear discriminant analysis) Erotteluanalyysin avulla pyritään muodostamaan selittävistä muuttujista
monimuuttujamenetelmiin, 5 op syksy 2018 Matemaattisten tieteiden laitos Lineaarinen erotteluanalyysi (LDA, Linear discriminant analysis) Erotteluanalyysin avulla pyritään muodostamaan selittävistä muuttujista
KONTTIJARVEN ALUEEN KIINTOPISTEET JA KAIRAREIKIEN KOORDINAATIT KKJ-KOORDINAATISTOSSA
 RAPORTTI 04013522 12lUMVl2001 Urpo Vihreapuu Jakelu OKMElOutokumpu 1 kpl OKMElRovaniemi 2 kpl KONTTIJARVEN ALUEEN KIINTOPISTEET JA KAIRAREIKIEN KOORDINAATIT KKJ-KOORDINAATISTOSSA Sijainti 1:50 000 Avainsanat:
RAPORTTI 04013522 12lUMVl2001 Urpo Vihreapuu Jakelu OKMElOutokumpu 1 kpl OKMElRovaniemi 2 kpl KONTTIJARVEN ALUEEN KIINTOPISTEET JA KAIRAREIKIEN KOORDINAATIT KKJ-KOORDINAATISTOSSA Sijainti 1:50 000 Avainsanat:
031021P Tilastomatematiikka (5 op) kertausta 2. vk:een
 kertausta 2. vk:een") 031021P Tilastomatematiikka (5 op) kertausta 2. vk:een Jukka Kemppainen Mathematics Division 2. välikokeeseen Toinen välikoe on la 5.4.2014 klo. 9.00-12.00 saleissa L1,L3 Koealue: luentojen luvut 7-11
031021P Tilastomatematiikka (5 op) kertausta 2. vk:een Jukka Kemppainen Mathematics Division 2. välikokeeseen Toinen välikoe on la 5.4.2014 klo. 9.00-12.00 saleissa L1,L3 Koealue: luentojen luvut 7-11
LIITE 1 VIRHEEN ARVIOINNISTA
 1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
Puuston mittaus etäisyyden- ja kulmanmittauslaitteella
 Metsätieteen aikakauskirja t i e d o n a n t o Jouko Laasasenaho Jouko Laasasenaho, Jyrki Koivuniemi, Timo Melkas ja Minna Räty Puuston mittaus etäisyyden- ja kulmanmittauslaitteella Laasasenho, J., Koivuniemi,
Metsätieteen aikakauskirja t i e d o n a n t o Jouko Laasasenaho Jouko Laasasenaho, Jyrki Koivuniemi, Timo Melkas ja Minna Räty Puuston mittaus etäisyyden- ja kulmanmittauslaitteella Laasasenho, J., Koivuniemi,
Sovellettu todennäköisyyslaskenta B
 Sovellettu todennäköisyyslaskenta B Antti Rasila 16. marraskuuta 2007 Antti Rasila () TodB 16. marraskuuta 2007 1 / 15 1 Epäparametrisia testejä χ 2 -yhteensopivuustesti Homogeenisuuden testaaminen Antti
Sovellettu todennäköisyyslaskenta B Antti Rasila 16. marraskuuta 2007 Antti Rasila () TodB 16. marraskuuta 2007 1 / 15 1 Epäparametrisia testejä χ 2 -yhteensopivuustesti Homogeenisuuden testaaminen Antti