ABB IRB 140 robottisolun käyttöönotto
|
|
|
- Anita Auvinen
- 7 vuotta sitten
- Katselukertoja:
Transkriptio

1 ABB IRB 140 robottisolun käyttöönotto Mikko Lindholm Opinnäytetyö Maaliskuu 2011 Kone- ja tuotantotekniikka Kone- ja laiteautomaatio Tampereen ammattikorkeakoulu
2 TAMPEREEN AMMATTIKORKEAKOULU Kone- ja tuotantotekniikka Kone- ja laiteautomaatio Tekijä Lindholm, Mikko Työn nimi ABB IRB 140 robottisolun käyttöönotto Sivumäärä 69 sivua + 19 liitesivua Valmistumisaika Maaliskuu 2011 Työn ohjaaja Yliopettaja, TkL Olavi Kopponen Työn tilaaja TAMK, Laboratorioinsinööri Seppo Mäkelä Tiivistelmä Tämän opinnäytetyöni tavoitteena oli saada Trimaster OY:ssä ollut, solustaan purettu robotti käyttökuntoon Tampereen ammattikorkeakoulun opiskelijoiden robotiikkaharjoituksia varten. Työhön kuului robotin saaminen käyttökuntoon ja robottisolun muuttaminen opiskeluympäristöön sopivaksi. Työni on kaksiosainen. Ensimmäisessä osassa on teoriaosuus, jossa käsitellään robotin ohjelmoinnissa käytettyjen käskyjen-, ja ohjelman rakennetta. Osiossa myös perehdytään niiden käyttämiseen esimerkkien avulla. Liikekäsky on purettu auki muotokielen muodossa, jolloin siitä näkee kuinka robotti käsittelee käskyä ja minkälainen on käskyn rakenne ohjelmoinnissa käytettyjen parametrien osalta. Työni toisessa osassa on käsitelty robotin käyttöönoton aikana tekemiäni muutoksia ja ongelmia työni aikana. Suurimmat ongelmat koskivat robotin turvallista käsittelyä ja robottisolusta poistettujen ominaisuuksien aiheuttamia muutoksia. Avainsanat ABB, robotti, käyttöönotto, robotiikka
3 TAMK UNIVERSITY OF APPLIED SCIENCES Mechanical and industrial engineering Machine automation Writer Mikko Lindholm Thesis Introduction of ABB IRB 140 robot cell Engineering thesis 69 pages + 19 appendices Graduating time April 2011 Thesis supervisor Olavi Kopponen Co-operating Company Tampere University of Applied Sciences Abstract The target of my master s thesis was to build working robot cell for the students to practice with. The robot was disassembled and needed some changes. The main changes to the robot cell were building new tools, adding some safety equipment and removing unnecessary parts. Finally the robot cell was suitable to the studying environment. My thesis is in two parts. The first part is a theory, which deals with the programming of the robot, and the structures of commands and program used. The section also focuses on their use through examples and one of the main move commands is opened as syntax. It gives the opportunity to see how the robot handles the commands. The second part of my work deals with the changes to the robot and problems that occurred during the process. The main problems occurred in robots safe handling and the changes that occurred while editing the robot cell. Keywords ABB, robot, robotics, introduction
4 Symboliluettelo I/O DI DO In/Out Put Sisä/ulos tulot Digital input Tulo Digital output Lähtö o Asteen merkintätyyli Sanasto Resistiivinen kosketusnäyttö Resistiivinen kosketusnäyttö on tarkempi kuin kapasitiivinen, mutta ei mahdollista moni kosketusta. Lisäksi resistiivistä kosketusnäyttöä voidaan käsitellä myös hanskat kädessä tai kynsillä, kun taas kapasitiivinen tarvitsee ihokosketuksen tai erillisen ohjaintikun. Servo Asemointiin tarkoitettu toimilaitteen ohjauspiiri, jossa on takaisinkytkentä asemaanturiin. Mitä kauempana servo-ohjattu laite on tavoiteasemasta, sitä suuremmalla voimalla se pyrkii siihen. Syntaksi Lauseoppi, johon sisältyy varattujen sanojen tunnistus.
5 Alkusanat Opinnäytetyön tekeminen Tampereen ammattikorkeakoululle oli minulle luonnollinen valinta, koska sain mielenkiintoisen ja haastavan aiheen. Aihe oli minulle henkilökohtaisesti kiinnostava, koska olen ollut aina kiinnostunut tekniikasta ja nyt pääsin suoraan tutustumaan robottiin alusta alkaen. Suuret kiitokset Tampereen ammattikorkeakoulun osaaville opettajille, Trimaster OY:lle ja ABB:n Juha Mainiolle, joilta kaikilta sain tukea ja inspiraatiota Mikko Lindholm
6 Sisällysluettelo Johdanto Robottijärjestelmä Robotti IRB Tekniset tiedot Irb Ohjausmoduuli Käsiajotila Testaustila (100% nopeus) Automaattiajotila (tuotantotila) Liitännät ja käyttöpainikkeet Käsiohjain Robotin käsiajo Lineaarinen käsiajo Askellusliike (inkrementti) Ohjelmointi RAPID-ohjelmointi Varatut sanat Ohjelman rakenne Pääohjelma Aliohjelma Ohjelmadata Käskyt Modulit Järjestelmämoduuli Ohjelmamoduuli Ohjelman lataaminen... 36
7 3.5.1 Ohjelman lataaminen vaiheittain Datatyypit Muuttuja Muuttujan ominaisuudet Muuttujan määrittely Muuttujan arvojen antaminen Pysyvä muuttuja Pysyvän muuttujan määrittely Vakio Vakioarvon käyttö Käskyjen rakenne Liikekäskyn rakenne Termien selitykset Käyttöönotto Robottisolun kokoaminen Työkalunvaihtaja Työkalut Kaksoistarrain Kääntyvätarrain Työkalunvaihtajan teline Paineilmaliitännän lisääminen Turvaratkaisut Valoverho Turvarele Ovien rajakytkimet Robotin ohjelmiston päivittäminen Havaintoja ja ongelmia... 65
8 8 Yhteenveto Lähteet Liitteet... 69
9 9 (88) Johdanto Tämän opinnäytetyön tarkoituksena oli ottaa käyttöön Tampereen ammattikorkeakoulun robottiluokassa sijaitseva ABB-robotin robottisolu. Solu oli alun perin käytössä messuesittelyissä ja se muokattiin opetuskäyttöön sopivaksi. Alkuperäisessä sovelluksessa robotti poimi hihnakuljettimelta muistitikun, siirsi sen lasertulostinyksikköön, jossa siihen tulostettiin asiakkaan haluama teksti. Tämän jälkeen muistitikku otettiin lasertulostusyksiköstä pois ja siirrettiin asiakkaan otettavaksi. Kappaleen paikantaminen kuljetinhihnalta toteutettiin konenäköohjelmiston ja pulssianturin avulla. Aikaisempaan kokoonpanoon jouduttiin tekemään huomattavia muutoksia, mm. konenäkö ominaisuuden poisjättämisen ja robotin työkalujen muuttamisen takia. Myös robottisolun rakenteita muutettiin huomattavasti. Robottijärjestelmää tullaan käyttämään opetustarkoituksessa, laboratoriotöiden yhteydessä.
10 10 (88) 2. Robottijärjestelmä Robottijärjestelmä on kokonaisuus, jossa robotti poimii tasolta tai kuljettimelta kappaleita ja siirtää ne haluttuun paikkaan. Tätä kokonaisuutta on mahdollista tulevaisuudessa laajentaa toisella robotilla tai muilla laitteilla. Tässä opinnäytetyössä robotti toimii omana yksikkönään kappaleenkäsittelijänä joka poimii kappaleita kuljettimelta palettiin erilaisten vaihdettavien työkalujen avulla. Robotissa on käytössä kaksi erilaista paineilmakäyttöistä tartuntatyökalua, joiden avulla saadaan toteutettua kappaleiden siirtäminen erilaisiin asentoihin ja paikkoihin harjoitustöiden vaatimalla tavalla. Järjestelmää on mahdollista laajentaa myös konenäköominaisuudella, mutta järjestelmän laajuuden takia se jätettiin tästä opinnäytetyöstä pois. Kappaleiden ominaisuuksien ja paikkatiedon määrittämiseksi järjestelmään voidaan kehittää lisäämällä erilaisia kappaleen ominaisuuksia tai paikkaa ilmaisevia antureita, mutta ne jätettiin tuleviin kehityshankkeisiin toteutettavaksi.





























11 11 (88) Kuvio 1. Robottijärjestelmä Robottijärjestelmä koostuu neljästä osasta (Kuvio 1): Robotti, R ohjainyksikkö, käsioh- Ope- jain ja tietokone. Ohjainyksikkö ja tietokone sijaitsevat sivummalla, eivätkä siksi näy Kuviossa. tuskäyttöää varten tähän robottiinn hankittiin työkalunvai ihtaja ja rakennettiin kaksi erilaista paineilmakäyttöistä tartuntatyökalua joiden avulla robotti pystyy poimimaan tavaroita kuljettimelta tai tasolta. 2.1 Robotti IRB-140 IRB-140 (Kuvio 2) on ABB:n toiseksi pienin kappaleen käsittelyyn tarkoitettu 6- akselinen robotti. Robottia valmistetaan sekä viiden, että e kuudenn kilogramman nos-












12 12 (88) tokyvyllä. Koululle hankitun robotin nostokyky on kuusi kilogrammaa. Robotin kaikkia akseleita voidaan liikuttaa samaan aikaan. Tämä mahdollistaa tehokkaat ja sulavat liikkeet. Robottia voidaan ajaa käsiajolla joko akseli kerrallaan tai antamalla paikkapiste muuttamalla XYZ-koordinaatteja. Robotille voidaan myös opettaa reittipisteet (flyby), joiden kautta robottii kulkee määrätyssä järjestyksessä. Tässää tapauksessa on kuitenkin huomioitava, että käyttää oikeaa työkalua määrityksissä kolarin välttämiseksi. Pisteet voidaan ohjelmoida syöttämällä ne käsin,, RobotStudio ohjelman avulla taii käyttämällä opetustoimintoa, jolloin robotti ajetaan haluttuun asentoon ja paikkaan sekä tallennetaan paikkapiste. Nämä paikkapisteet tallentuvat t ohjelmadataan ja ovat kaikkien rutiinien käytettävis- sä. Kuvio 2. ABB IRB-140 robotti
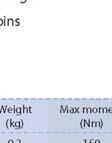
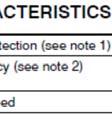
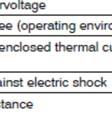
13 13 (88) Tekniset tiedot Irb-140 Vapausasteita: 6 (Kuvio 3) Suurin kuormitettavuus: 6 kg Toistotarkkuus: 0.03mm Ulottuvuus: 810 mm mm Maksiminopeus: 2500 s Liikeradat: 1-akseli 2-akseli 3-akseli 4-akseli 5-akseli 360 o 200 o 280 o 400 o 240 o 6-akseli 800 o Paino: käsivarren 98 kg ja koko yksikön 250 kg IP luokitus: 67 Käyttölämpötila: 5-45 o C Käyttökosteus: 95 % m Maksimi kiihtyvyys: 20 2 s Kiihtyvyysaika 0-1 s m : 0.15 s Verkkojännite 400 AC Muuntaja 260 VAC Tasasuuntaaja 260 VAC ja 370 VDC Virtalähde 370 VDC Robottimoottoreiden virtalähde 370 VDC



.")














14 14 (88) Kuvio 3. Robotin vapausasteet 2.2 Ohjausmoduuli Ohjausmoduuli on robotin ohjausyksikkö (Kuvio 4). Tässä osassa tapahtuu varsinai- lähetetään ohjainyksikölle, jonnee ne tallentuvat. Ohjausmoduuli sijaitsee robotin alla nen robotin ohjaus. Tietokoneell la tai käsiohjaimella tehdyt ja muokatut ohjelmat olevassa kaapissa. Ohjausmoduulin etupaneelissa on tärkeimmät painikkeet ja avain, millä vaihdetaan ohjausyksikön tilaa. Käytettävissä ovat seuraavatt kolme tilaa: Kä- siajotila, testaustila ja automaattiajotila.






















15 15 (88) Kuvio 4. Robotin ohjausyksikköö Käsiajotila Käsiajotilassa robotti voi liikkuaa vain käyttämällä alennettua ja turvallista nopeutta (25% maksimi nopeudesta).tässä tilassa käyttö tapahtuu ainoastaan käsin ohjaten. Käsiajotilaa valitaan ohjainyksikön käyttötapakytkimestä (Kuvio 5) ). Käsinajoaa käyte- tään ohjelmien luomiseen ja robottijärjestelmä käyttöönottoon. Kuvio 5. Käyttötapakytkin
.")





 Täyden")


16 16 (88) Robotin servomoottorit aktivoidaan painamalla sallintakytkintä (Kuvio 6). Käsiajoti- laa käytetään useimmiten ohjelmaa luotaessa ja robottijärjestelmänn käyttöönotossa. Käsiajotilassa voidaan: - Peruuttaaa robottia ohjelmapolkua pitkin hätäseis-tilanteen jälkeenn - Muuttaa I/O-signaalien arvoja vikatilanteiden jälkeenn - Luoda ja editoida RAPID-ohjel lmia - Muuttaa ohjelmoitua paikkapisteitä /1, s 43/ Kuvio 6. Sallintakytkin ( kuolleen miehen kytkin ) Testaustila (100% nopeus) Täyden nopeuden käsiajoa käytetään ohjelman testaamiseen luonnollisessa tilantees- sa, verrattuna käsiajotilan normaaliin alennettuun nopeuteen. Tämä tila on käyttökel- vali- poinen robotin ja käsittelylaitteenn välistä synkronointiaa testatessa. Testaustilaa taan ohjainyksikön käyttötapakytkimestä (Kuvio 7)
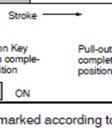
17 17 (88) Testaustilassa voi ajaa täydellä nopeudella ja käytössä on myös ohjelmaeditorin anei ole tama virheiden poistomahdollisuus, mitä tuotantotilassaa ei ole. VAARA Testaaminen täydellää nopeudellaa on vaarallista. Varmista, että turva-alueella ihmisiä käynnistäessäsi ohjelman. Ulkoiset turvalaitteet, kuten valoverho, ovirajat, ynnä muut eivät ole käytössä ohjelman suorittamisen aikana. a /1, s. 43/ Kuvio 7. Testaustilan valinta Automaattiajotila (tuotantotila) Automaattiajossa sallintakytkin (Kuvio 6) on toimeton, jolloin robotti voi liikkua ilman ihmisen ohjaamista. Tuotannossa robottijärjestelmä toimii yleensä automaatti- oh- tilassa. Robottijärjestelmää voidaan ohjata kauko-ohjau uksella, esim. käyttämällä jaimen I/O signaaleja. Tulosignaali voi esimerkiksi käynnistää tai pysäyttää RAPID- ohjelman, aktivoida robottijärjesr stelmä moottoreita, ja niin n edespäin. Tuotantotila otetaan käyttöön valitsemalla käyttötapakytkimestä tuotantotilan asento (Kuvio 8). Automaattiajotilassa käytetään monia lisäturvalaitteita,, kuten valoverhoa ja rajakyt- kimiä turvallisuuden lisäämiseksi. Nämä lisäturvalaitteet eivät ole käytössä käsiajoti- loissa. /1, s.44/
18 18 (88) Rajoituksia Käsiajo ei ole mahdollinen automaattitilassa. Automaattiajossa voidaan: - Käynnistää ja pysäyttää prosesseja - Ladata, käynnistää ja pysäyttää RAPID-ohjelmiaa - Peruuttaa robottia ohjelmapolkua pitkin hätäseis-tilanteen - Palauttaa varmuustallennuksia - Puhdistaa työkaluja - Valmistella ja vaihtaa työkohteita - Suorittaa muitaa prosessiin liittyviä tehtäviä VAARA! jälkeen - Ottaa järjestelmästä varmuustallennuksia Automaattitilassa robotti voi liikkua ilman ennakkovar oitusta Varmista, että turva-alueella ei ole ihmisiä Kuvio 8. Tuotantotilan valinta
19 19 (88) Liitännät ja käyttöpainikkeet Ohjausyksikössä löytyvät seuraavat kytkimet ja käyttöpainikkeet (Kuvio 9): 1. Päävirtakytkin - Tästä kytketään robottiin virrat päälle 2. Hätäseis nappi - Hätätilanteessa robotin saa pysäytettyä 3. Kuittausnappi - Kuitataan, että kaikki on valmista automaattiajoa varten 4. Valintakytkin - Kytkimestä valitaan haluttu käyttötapa kolmesta eri vaihtoehdosta. Vaihtoehdot ovat käsiajo, käsiajo tuotantonopeudella ja automaattiajo 5. USB-liitin - varmuuskopioiden ottamista ja ohjelmien siirtämistä varten 6. Service pc ethernet liitin, - Liitetään robotti online-ohjelmointia varten tietokoneeseen. Tämän liitännän kautta myös Picmaster konenäköohjelma käsittelee ja antaa komentoja robotille. /1, s. 4/

















20 20 (88) 1. Päävirtakytkin 2. Hätäseis kytkin 3. Kuittausnappi 4. Valintakytkinn 5. Merkkivalot 6. USB-liitin 7. Verkkoliitin Kuvio 9. Liitännät ja käyttöpainikkeet Kuvio 10. Robotin jarrujen vapautus Robotti on myös varustettu jarrujen vapautus painikkeella (Kuvio 10). Tämän pai- nikkeen avulla voidaan vapauttaaa robotin kaikkien akselien jarrut. Tämä mahdollis- pai- taa hankalaan asentoon jumittuneen robotin liikuttamisen lihasvoimilla. Nappia nettaessa on huomioitava, että robotin käsivartta ei saa päästää hallitsemattomasti putoamaan. Pudottaminen voi aiheuttaa henkilö tai kalustovahinkoja. /1, s. 13/
21 21 (88) 2.3 Käsiohjain Ohjausyksikköön liitettiin myös käsiohjain, eli kädessä pidettävä opetusyksikkö (Kuvio 11). Ohjaimessa on suurikokoinen resistiivinen kosketusnäyttö (Kuvio 12) jonka avulla pystytään määrittämään tai muuttamaan robotille ohjelmoituja paikkapisteitä. Ohjaimessa on myös kolmisuuntainen ohjainsauva (Kuvio 12), jonka avulla voidaan ohjata robottia manuaalisesti ja samanaikaisesti useiden akselien liikettä. Käsiohjainta käytetään muun muassa paikkapisteiden määrittämiseen, robotin liikeratojen ja ohjelman toimivuuden testaamiseen, tarvittaessa virhetilanteiden korjaamiseen suoraan robotin vieressä. Tällainen tilanne on esimerkiksi vuorovaikutteinen ohjelman kierto. Tällöin käsiohjaimen näytön avulla tiedustellaan operaattorilta, montako kappaletta tuotetaan. Käsiohjain on erityisesti kätevä silloin, kun tarvitsee päästä kohteen lähelle tarkkailemaan samalla kun ohjataan robottia. /1, s. 8/ Käsiohjaimella tapahtuvaa robotin ajoa varten tulee avain kääntää ohjainyksikössä käsiajotilaan asentoon (Kuvio 5) Tämän lisäksi tulee ohjaimesta painaa kolmiasentoinen sallintakytkin (Kuvio 6) keskiasentoon, jolloin servot käynnistyvät. Sallintakytkin on robottia ohjattaessa pidettävä jatkuviosti keskiasennossa, koska muuten robotin servot sammuvat. Sallintakytkin on varotoimenpide, jolla estetään ohjaavan henkilön puristumien robotin ja jonkin rakenteen väliin. Samalla varmistetaan se, että robotti ei liiku vahingossa painettaessa laitepainikkeita (Kuvio 12). Lisäksi ohjaimesta löytyy neljä esiohjelmoitavaa nappia, joilla saa valittua lähtöjä päälle tai pois. Näitä nappeja on kätevä käyttää mm. kappaleiden noukkimiseen oikean paikkapisteen löytämiseksi (Kuvio 13). /2, s. 44/

















22 22 (88) Kuvio 11.. Käsiohjain Kuvio 12. Ohjausyksikön laitepainikkeet A Ohjausyksikön liitin B Resistiivinen kosketusnäyttö C Hätäseiss kytkin D Kuolleenmiehen kytkin E Kolmisuuntainen ohjaussauva






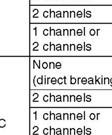
23 23 (88) Kuvio 13. Ohjausyksikön ohjelmapainikkeet A-D E F G H Ohjelmoitavat pikapainikkeet 1-4 Aja painike Askellus eteen Askellus taakse Seis painike Ohjelmoitavien pikapainikkeidenn määrittäminen tapahtuu ABB valikon Ohjauspa- voidaan määrittää neljälle pikanäppäimelle haluttu tyyppi: Ei mitään, m tulo, lähtö tai järjestel- mä. neeli välilehdeltä. Lehdeltä valitaan ohjelmoitavat näppäimet valikko, jossa Mikäli valitaan tyypiksi lähtö, voidaan valita seuraavista tapahtumavaihtoehdoista (Kuvio 14): 1. Vaihto Vaihtaa signaalin arvon toiseksi. Esim Aseta arvoksi 1 Asettaa lähdölle arvon 1











24 24 (88) 3. Aseta arvoksi 0 Asettaa lähdölle arvoksi 0 4. Paina/Vapautaa Painettaessa vaihtaa signaalin arvoksi 1 (Huomioi, että ä invertoitu signaali antaa arvon 0). 5. Pulssi Signaalin arvo tekee yhden pulssin Kuvio 14. Pikanäppäinten ohjelmointi 2.4 Robotin käsiajo Robottia voidaan ohjata ohjausyksikön avulla pitämällää sitä joko vasemmallaa tai oikealla kädellä. Oikeanlaiset ohjausyksikön käsittelyotteet näkyvät kuvioista 15 ja 16. Käsiajo tarkoittaa robotin tai ulkoisten akselien ohjaamista ohjausyksikön kol- misuuntaisella ohjaussauvalla. Käsiajo on mahdollista vain v käsiajo tiloissa, mutta ei samanaikaisesti kun robotti r suorittaa ohjelmaa. Yleensää käsiajo suoritetaan suorina liikelinjoina, esimerkiksi lineaariliikkeenä paikkapistee estä A paikkapisteeseen B.
. Valittava koordinaatisto määräy- tyy valittavan tehtävän mukaisesti. /2, s.")


25 25 (88) Lineaariliike suhteutuu valittavaan koordinaatistoon (maailma-, työkalu-, perus-, käyttäjä-, ohjelmasiirros tai kohdekoordinaatisto). Valittava koordinaatisto määräy- tyy valittavan tehtävän mukaisesti. /2, s. 42/ Voit myös liikuttaa robottia yksii akseli kerrallaan. Akseli kerrallaan liike ei kuiten- kaan kohdistu mihinkään koordinaatistoon. Tällöin menetetään työkalun kohdistus- tiedot, mikä voi vaikuttaa myöhempiin toimintoihin. HUOM! Robotin liikerata käsiajossa ei ole yleensä sama kuin ohjelman ohjaama rata. Ohjel- kah- ma ohjaa robottia käyttämään nopeinta ja lyhintä suoraa tai kaarevaa liikerataa den paikkapisteen välillä. Tämä on huomioitava mahdollisia törmäyksien välttämi- seksi. /1, s. 15/ Kuvio 15.. Ohjausyksikön pitäminen vasemmalla kädellä Kuvio 16. Ohjausyksikön pitäminen oikealla kädellä

26 26 (88) Lineaarinen käsiajo Valittu liike ja/tai koordinaatisto määrittää robotin liikkeet. Lineaariliikkeessä työkalupiste liikkuu suoria viivoja pitkin avaruudessa esimerkiksi pisteen A ja B välin. Työkalupiste liikkuu valitun koordinaatiston akselien mukaisesti. /1, s. 16/ B A C D E F A mekaanisen yksikön valinta painike B Valittu mekaaninen yksikkö C Liiketavan asetukset D Työkaluasetukset E koordinaatisto asetukset Kuvio 17. Liiketavan valinta
27 27 (88) Ohjaussauvan toiminta määräytyy valitun liiketavan mukaan (Kuvio 17). Vaihtoeh- toina ovat (Kuvio 18) ): 1. akselit akselit Lineaarinen 4. Uudelleen orientointi Kuvio 18. Liikuteltavien akselien valitseminen Ohjaussauvan liikkeiden toiminta näkyy ikkunassa ohjaussauvan suunnat valinnan jälkeen. Huomioi kuitenkin, että ohjaussauvan suunta ei e aina vastaa mekaanisen yk- ohja- sikön liikesuuntaa. Varmista ainaa liikesuunnan oikeellisuus käyttämällä lyhyitä ussauvan liikkeitä, varmistaaksesi mekaanisen yksikönn todellisen liikesuunnan. /1, s. 17/ Askellusliike (inkrementti) Askellusliikettä voidaan käyttää robotin paikantamiseen. Aina kunn ohjaussauvaa käännetään, robotti siirtyy yhdenn askeleen ( inkrementti). Mikäli ohjaussauvaaa käänniin kauan kuin ohjaussauvaa pidetään käännettynä, robotinn liikerata saavuttaa rajansa tai netään sekunnin tai pidempään, niin robotti askeltaa (10 askelta sekunnissa) tulee osuma rakenteisiin. /1, s. 19/



 Kulmaliike")




28 28 (88) Kuvio 19. Inkrementit Käytössä olevat askelkoot liittyen kuvioon 19. Askelkoko Matka (mm) Kulmaliike (astetta) Pieni Keskisuuri Suuri Käyttäjän määritte- lemä 0, ,5-10,0 0,005 0,02 0,2 Akselit 0,01-0,20 Uudelleen orientointi 0,03-0,50
29 29 (88) 3. Ohjelmointi Tässä kappaleessa käsitellään Rapid-ohjelmointiin liittyvää ohjelmarakennetta. Rakenteeseen kuuluu oleellisesti varattuja sanoja, joita ei tule käyttää ohjelman osien nimeämiseen. Lisäksi käsittelen muita robotin ohjelmoinnin mahdollistavia ohjelmia ja niiden puutteita verrattuna RAPID editoriin. 3.1 RAPID-ohjelmointi Mikäli haluat tietokoneen tekevän jotain, tarvitaan ohjelma. RAPID on ohjelmakieli, kuten C-kieli, joita käytetään ohjelman kirjoittamiseen. Tietokoneen perusohjelma sisältää vain ykkösiä ja nollia. Tätä ohjelmatyyppiä on ihmisten mahdotonta ymmärtää. Tämän vuoksi tietokoneiden ohjelmoinnin helpottamiseksi on kehitetty erilaisia korkeantason ohjelmointi kieliä. RAPID on yksi tällainen korkeantason ohjelmointikieli. Se sisältää joitakin englanninkielisiä sanoja, kuten (IF ja FOR), jotta siitä on saatu helpommin ymmärrettävä. /3/ s.11 RAPID ohjelmointia on mahdollista tehdä usealla eri ohjelmalla. Kaikkein helpointa se on RobotStudion liitetyllä RAPID Editor nimisellä ohjelmaeditorilla. Tätä käytettäessä editori näyttää esimerkiksi MoveL käskyn jälkeen sallitut lisäkomennot (Kuvio 20). Toinen yksinkertainen tapa muokata ohjelmaa on käyttää käsiohjaimen ohjelmaeditoria (Kuvio 21), jolloin ohjelma itsessään pitää huolen muotokielen oikeellisuudesta. Molemmat ABB:n ohjelmaeditorit ehdottavat seuraavaa käskyyn liittyvää parametria, mitä tarvitaan käskyn suorittamiseen ja sisältävät myös virheenkorjaus toiminnon, joka näyttää missä kohdassa ohjelmaa on muotokielen (syntaksin) vastainen osa. RobotStudiota käytettäessä on myös mahdollista simuloida robotin toimintaa ja liikkeitä kuten myös tehdä törmäystarkastelu, mikäli ohjelmaan on tuotu esimerkiksi









30 30 (88) autocad:illä tehtyjä kappaleita. Tämä mahdollistaa tuotannon kokoo prosessivaiheen simuloinnin ja työkierron hiomisen mahdollisimman hyväksi. RobotStudion avulla on myös mahdollista tehdä Onlinee ohjelmointia, eli robottiin ollaan yhteydessä ethernet yhteyden avulla. Tämä kuitenkin edellyttää, että robottiin on aktivoitu kyseinenn ominaisuus. Jokaiseen ABB:n valmistamaann robottiin saa s tä- oh- män ominaisuuden maksua vastaan käyttöön. Online-ohjelmointi mahdollistaa jelmoinnin, ilman että operaattori on fyysisesti läsnä robotin luona. Ohjelmia on mahdollista kirjoittaa ja muokata myös perustason tekstieditorilla kuten Notepad. Tällöin pitää olla tarkkana tekstin muotopuolesta (syntaksi), koska RAPID ohjelmointikieltä ymmärtävää virheenkorjausta ei ole käytettävissäk ä normaalissa teks- tieditorissa. Notepad on hyvin suosittu tapa editoida yksinkertaisiaa kappaleen siirto- arvoja muutellaan. /5/ ohjelmia, jossa useissa soluissa käytetään saman ohjelman pohjaa ja vain joitakin Kuvio 20. RAPID Editor














31 31 (88) Kuvio 21. Käsiohjaimen ohjelmaeditori 3.1 Varatut sanat Alla olevaan listaukseen on kerätty sanat, jotka ovat varattuja robotin ohjausjärjes- saa s telmässä. Niillä on erityinen tarkoitus RAPID ohjelmointikielessä,, eikä niitä käyttää identifioimiseen. Listassa on myös joukko ennaltaa määrättyjää nimiä eri datatyypeilled e, systeemi datalle, funktioille ja ohjeille. Näitä ei saa missään tapauksessa a käyttää nimeämiseen. Näiden sanojen käyttäminen muissa, kuin sanoille tarkoitetuiss sa toiminnoissa, aiheuttaa vir- he- tai jopa vaaratilanteita ohjelmaa suoritettaessa. /4, s. s 17/
32 32 (88) ALIAS AND BACKWARD CASE CONNECT CONST DEFAULT DIV DO ELSE ELSEIF ENDFOR ENDFUNC ENDIF ENDMODULE ENDPROC ENDRECORD ENDTEST ENDTRAP ENDWHILE ERROR EXIT FALSE FOR FROM FUNC GOTO IF INOUT LOCAL MOD MODULE NOSTEPIN NOT NOVIEW OR PERS PROC RAISE READONLY RECORD RETRY RETURN STEP SYSMODULE TEST THEN TO TRAP TRUE TRYNEXT UNDO VAR VIEWONLY WHILE WITH XOR 3.2 Ohjelman rakenne Ohjelma koostuu robottia ja oheislaitteita määrätyllä tavalla ohjaavasta RAPIDkielellä ohjelmoiduista käskyistä ja datasta. Ohjelma muodostuu yleensä neljästä erilaisesta osasta (Kuvio 22): Päärutiini (pääohjelma) Useita alirutiineja (aliohjelmia) Ohjelmadata Järjestelmämoduleista








33 33 (88) Kuvio 22. Ohjelman rakenne Pääohjelma Ohjelman suoritus alkaa aina päärutiinista. Päärutiini on hyvä pitää mahdollisimman yksinkertaisena ja helposti luettavana, eli tehdä kaikki ohjelmat aina alirutiineiksi. Tällöin ohjelmaa on yksinkertais sempi lukea ja muokataa virhetilanteiden sattuessa. Päärutiini koostuu useista alirutiineista, jotka vastaavatt robotin työkiertoa Aliohjelma Aliohjelmaa käytetään ohjelmann jakamiseksi pienempiin ja helpommin luettaviin osiin, jolloin muodostuu helpostii luettava modulaarinen n ohjelma. Alirutiineja kutsu- taan päärutiinista tai muista alirutiineista. Kun rutiini on suoritettuu loppuun, ohjel- man suoritus palaa kutsuneen rutiinin seuraavaan käskyyn.
34 34 (88) Ohjelmadata Dataa käytetään sijaintien, numeraalisten arvojen (rekisterien, laskurien, ym.), koordinaattijärjestelmien, jne. määrittämiseen. Dataa voidaan muuttaa manuaalisesti, mutta se voi muuttua myös ohjelman toimesta (esimerkiksi laskurit). Datatyyppejä on useita, joista tärkeimmän esittely kappaleessa 3.3 Datatyypit Käskyt Käsky määrittää tietyn toiminnan, joka täytyy tapahtua käskyä suorittaessa. Esimerkiksi robotin liikuttaminen (MoveJ), lähtöarvon asettaminen (reg1:=5;), datan muuttaminen, jne. Ohjelman käskyt suoritetaan yksi kerrallaan siinä järjestyksessä, missä ne on ohjelmoitu Modulit Moduulia voi ajatella eräänlaisena hakemistona tai kansiona, joka sisältää ohjelmia ja ohjelmadataa. Moduuleita voidaan tallentaa erikseen ja tarpeettomat moduulit voidaan poistaa robotin käyttömuistista. Jos moduuleita ei ole erikseen tallennettu ja ne poistetaan muistista, häviävät moduulit pysyvästi.
35 35 (88) Järjestelmämoduuli Robotin muistiin on tallennettu järjestelmämoduuli, joka sisältää järjestelmässä tarvittavia toistuvia toimintoja. Näitä toimintoja ovat muun muassa Työkalujen määrittelyt, kotiasemaan ajot, työkalun esimerkiksi tarraimen ohjaus ja työkalunvaihtorutiinit. Nämä tiedot eivät häviä robotin muistista ohjelmia poistettaessa Ohjelmamoduuli Ohjelmamoduuleita voi olla ohjaimeen ladattuna useita samalla hetkellä, mutta vain yksi voi olla nimeltään main, eli pääohjelma. Myöskään muiden moduulien välillä ei saa esiintyä nimiristiriitoja, eli samoja nimiä kahteen tai useampaan kertaan. Ohjelmamoduuli sisältää ohjelmadataa ja ohjelmia. Robotin ohjelma voidaan jakaa ohjelmamoduuleihin, joista jokainen sisältää joukon rutiineja ja dataa. Tämän lisäksi voidaan käyttää aina läsnäolevia järjestelmämoduuleita. Moduulit voivat sisältää esimerkiksi: Yleisiä rutiineja monille eri asennuksille CAD:lla tuotettuja sijainteja Oheislaitteille, esimerkiksi työkappaleen käsittelijälle, tarkoitettuja rutiineja. Järjestelmämoduulit voivat sisältää kaikkien robotin ohjelmien käyttämää dataa (työkaludata). Sekä järjestelmä että ohjelmamoduulit toimivat samalla tavalla, kun ne on ladattu muistiin. Kaikkia moduuleita voidaan normaalisti editoida ohjelmointiyksiköstä,
36 36 (88) mutta järjestelmämoduulin ollessa normaalisti kirjoitussuojattu, täytyy suojaus ensin poistaa. 3.5 Ohjelman lataaminen Tässä luvussa kerrotaan, kuinka ohjelma ladataan robotille. Ohjelma muodostuu yleensä kolmesta osasta: päärutiinista (mikä on aina mukana), joukosta alirutiineja ja ohjelmadatasta. Ohjelmassa voi olla vain yksi päärutiini Ohjelman lataaminen vaiheittain Seuraavaksi kuvataan aiemmin luodun ohjelman lataaminen vaihe vaiheelta. ABB-valikossa paina Ohjelmaeditori Paina Taskit ja ohjelmat Mikäli tehtäväikkunassa ei ole ladattua ohjelmaa, dialogi-ikkuna avautuu (Kuvio 23). Paina Uusi, ellei ohjelmaa ole ja uusi ohjelma luodaan. Paina Lataa, jos aikaisemmin kirjoitettu ohjelma käytetään. Tilan tekemiseksi uudelle ohjelmalle, vanha ohjelma on ensin poistettava. Käytä tiedostonhaku työkalua ladattavan ohjelmatiedoston hakemiseen (Kuvio 24).





37 37 (88) Kuvio 23. Ohjelman lataaminenn Kuvio 24.. Ohjelman lataaminen n 2 Paina Ok..





38 38 (88) Kun ohjelma on latautunut, näytössä näkyy esimerkiksi seuraavaa (Kuvio 25) ). Kuvio 25. Ohjelma ladattuna
39 39 (88) 4 Datatyypit Seuraavissa kappaleissa on esitetty tärkeimmät datatyypit. Datatyypeistä käydään läpi niiden ominaisuuksia ja käyttötarkoituksia. 4.1 Muuttuja Numeraaliset (Num) Voivat sisältää kokonaislukuja tai desimaalilukuja. Esimerkiksi 10 tai Jono (String) Tekstijono esim. tämä on merkkijono. Voi sisältää korkeintaan 80 merkkiä Boolen muuttuja (Bool) Boolen muuttuja. Voivat saada vain arvot TRUE (tosi) tai FALSE (epätosi) Kaikki robottiohjelmoinnissa käytettävät muut datatyypit (Liite 1) perustuvat näihin kolmeen eri datatyyppiin (Num, String ja Bool). Mikäli ymmärrät näiden datatyyppien käyttämisen ohjelmoinnissa, mahdollistaa se muiden mutkikkaampien datatyyppien käytön. /3, s. 12/
40 40 (88) Muuttujan ominaisuudet Muuttuja sisältää data-arvon. Jos ohjelma on pysäytetty ja aloitettu uudelleen, muuttuja pitää arvonsa. Mutta mikäli ohjelman osoitin on siirretty päärutiiniin, niin olemassa ollut data arvo menetetään. Esimerkiksi työpäivän aikana valmiiksi saatujen kappaleiden lukumäärä menetetään ja laskuri aloittaa laskemisen taas alusta. /3, s. 12/ Muuttujan määrittely Muuttujaa määriteltäessä on tapana määrittää nimi ja datatyyppi, jota muuttuja käyttää. Muuttuja määritetään käyttämällä avainsanaa VAR, välttääksemme ohjelmavirheitä. /3, s. 12/ VAR datatyyppi nimi Esimerkki VAR num length; VAR string name; VAR bool finished; Muuttujan arvojen antaminen Arvo annetaan muuttujalle käyttämällä käskyä := length := 10; name := "John" finished := TRUE;
41 41 (88) Huomaa, että := ei ole matematiikassa käytetty yhtä suurta tarkoittava merkki. Se tarkoittaa, että lauseke oikealla ohjaa muuttujaa vasemmalla. := merkin vasemmalla puolella voi olla vain muuttuja. Esimerkiksi, alla olevat ovat virheettömiä RAPID koodeja jolla reg1 saa arvon 3. reg1 := 2; reg1 := reg1 + 1; Määrittely voidaan myös tehdä samaan aikaan muuttujan määrittelyn kanssa. VAR num length := 10; VAR string name := "John"; VAR bool finished := TRUE; 4.2 Pysyvä muuttuja Pysyvä muuttuja (Persistent variables) )on yksinkertaisuudessaan samanlainen kuin tavallinen muuttuja. Tärkein ero on, että tämä muuttuja muistaa arvonsa, vaikka ohjelma lopetettaisiin ja aloitettaisiin taas alusta päärutiinista. /3, s. 13/ Pysyvän muuttujan määrittely Pysyvä muuttuja on eritelty avainsanalla PERS. Käskyssä alkuperäinen arvo on ilmoitettava Esimerkki. Tarkastele seuraavaa koodiesimerkkiä. PERS num nbr := 1; PROC main()
42 42 (88) nbr := 2; ENDPROC Jos tämä ohjelma suoritetaan, olemassa oleva arvo on vaihdettu kahdeksi (2). Seuraavan kerran kun ohjelma suoritetaan, ohjelman koodi tulee näyttämään tältä: PERS num nbr := 2; PROC main() nbr := 2; ENDPROC 4.3 Vakio Vakio (Constants) sisältää arvoja, kuten muuttuja, mutta arvo on aina annettu määrittelynä (esim tai 9.81), arvoa ei voi sen jälkeen enää muuttaa ohjelman aikana. Vakioarvoa voidaan käyttää muuten ohjelmassa samalla lailla kuin muuttujaa. /3, s. 14/ Vakioarvo on määritetty avainsanalla CONST, jota seuraa datatyppi, identifiointi ja määritetty arvo. CONST num gravity := 9.81; CONST string greating := "Hello"
43 43 (88) Vakioarvon käyttö Käyttämällä vakioarvoa muuttujana, varmistutaan siitä, että arvo ei muutu jossakin vaiheessa ohjelmassa. On parempi käyttää pysyvää muuttujaa, mikäli ohjelmaa tarvitsee päivittää jollakin muulla pysyvän muuttujan arvolla. Tällöin tarvitsee muuttaa vain yhteen paikkaan arvo ja voit olla varma, että et ole unohtanut päivittää arvoa minnekään muualle ohjelmaan. /3, s. 14/
44 44 (88) 5. Käskyjen rakenne Tässä kappaleessa käsittelen liikekäskyn rakennetta hieman perusteellisemmin. Kappaleessa on avattu käskyn syntaksi ja kerrottu mitä käsky pitää sisällään robotin ohjelmoinnin näkökulmasta. 5.1 Liikekäskyn rakenne Esimerkissä käyn läpi robotin yhdistetyn liikekäskyn syntaksin eli muotokielen. MoveJ Liikuttaa robottia yhdistetyllä liikkeellä MoveJ [\Conc] ToPoint [\ID] Speed [\V] [\T] Zone [\Z] [\Inpos] Tool [\WObj] Yläpuolella oleva teksti on robotin liikekäskyn malli, minkä mukaan robotin operaattori määrittää haluamansa toiminnot. Seuraavaksi teksti kertoo mitä mikäkin käskyn osa pitää sisällään robotin kannalta (syntaksi). Suluissa lihavoituna olevan osan jälkeen näkyy muuttajan tallennusmuoto. /6, s.249/ MoveJ [ \ Conc, ] [ ToPoint := ] < expression (IN) of robtarget > [ \ ID := < expression (IN) of identno >], [ Speed := ] < expression (IN) of speeddata > [ \ V := < expression (IN) of num > ] [ \ := < expression (IN) of num > ], [Zone := ] < expression (IN) of zonedata > [ \ Z := < expression (IN) of num > ] [ \ Inpos := < expression (IN) of stoppointdata > ],
45 45 (88) [ Tool := ] < persistent (PERS) of tooldata > [ \ WObj := < persistent (PERS) of wobjdata > ] ; Termien selitykset [\Conc] (Rinnakkainen suoritus) Datatyyppi switch Myöhemmät käskyt toteutetaan, robotin yhä ollessa liikkeessä. Argumenttia ei yleensä käytetä. Sitä voidaan kuitenkin käyttää, välttääkseen ei haluttuja pysähdyksiä. Nämä pysähdykset johtuvat robotin prosessorin ylikuormituksesta, kun käytetään liikeratapisteitä. Tämä komento on käytännöllinen, kun ohjelmoidut pisteet ovat lähellä toisiaan ja robotti liikkuu kovalla nopeudella. Toinen käyttökohde on, kun kommunikoidaan ulkoisten akselien kanssa ja synkronointi ulkoisen akselin ja robotin välillä ei ole välttämätöntä. Kun käytetään argumenttia \Conc, jaksossa olevat liikekäskyt ovat rajattu viiteen. Ohjelmaosuus, joka sisältää Storepath-Restorepath argumentteja, \Conc argumentin käyttö on kielletty. Jos tämä argumentti on jätetty pois ja kohdepiste ei ole pysähdyspaikka, niin seuraavat käskyt suoritetaan hieman ennen, kuin robotti on saavuttanut ohjelmoidun alueen (zone). ToPoint (kohdepiste) Datatyyppi: Robtarget Kohdepiste robotille ja ulkoisille akseleille. Se on määritetty nimettynä kohteena (esim. p_koti) tai ohjelmoitu suoraan ohjeesta (merkattu *)
46 46 (88) [\ID] (Synkronointi ID) Datatyyppi: identno Tätä argumenttia täytyy käyttää Moniajo systeemissä (Useamman robotin välisessä), mikäli koordinoidaan synkronoitua liikuttelua. Ei ole sallittu missään muussa tapauksessa. Määrätty ID numero pitää olla sama kaikissa yhteistyö ohjelma taskeissa. Id numero takaa sen, etteivät liikkeet eivät sekoitu ajon aikana. Speed (nopeus) Datatyyppi: speeddata Nopeusdata, jota sovelletaan liikkeeseen. Nopeusdata määrittää työkalun keskipisteen nopeuden, työkalun uudelleen orientoitumiselle ja ulkoisille akseleille. [\V] Velocity Datatyyppi: num Tätä argumenttia on käytetty määräämään nopeutta TCP:lle (Tool Center Point/työkalupiste) suoraan ohjeissa. Se korvaa siten nopeuden, joka on määritetty nopeusdatassa (speed data). [\T] Time Data type: num Tätä argumenttia käytetään määrittämään kokonaisaikaa sekunteina jonka robotti käyttää liikkumiseen. Se korvaa siten nopeuden nopeusdatassa (speeddata). Zone alue Data type: zonedata Aluedata liikkeelle. Aluedata Kuvioa generoidun liikeradan tarkkuutta (minkä alueen sisällä robotti tekee halutun liikkeen liikepolulla).
47 47 (88) [\Z] Data type: num Argumenttia käytetään spesifioimaan paikan virheettömyys TCP:lle suoraan ohjeissa. Säde on annettu millimetreinä ja se vastaa aluetta joka on määrätty alue datassa (zone data). Esimerkiksi Z50 tarkoittaa että robotin työkalupiste kulkee 50 mm sisällä ohjelmoidusta pisteestä. [\Inpos] In position (kohteessa) Data type: stoppointdata Argumenttia käytetään spesifioimaan lähestymiskriteeriä robotin TCP:lle pysäytys pisteessä. Pysäytys pistedata (stop point data) vastaa alueparametria. Tool (työkalu) Data type: tooldata Työkalu, jota käytetään robotin liikkuessa. Työkalun keskipiste liikkuu määrättyyn kohdepisteeseen. [\WObj] Work Object (työkohde) Data type: wobjdata Työkohde (koordinaatisto systeemi), johon robotin asento ja kohdistus liittyy. Tämä argumentti voidaan jättää pois, jolloin asento on yhteydessä maailmakoordinaatistoon. Mikäli käytetään liikkumatonta työkalupistettä (TCP), tai koordinoidut ulkoiset akselit ovat käytössä, tämä argumentti pitää olla määritelty.




















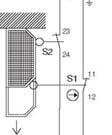
48 48 (88) 6 Käyttöönotto Tämä osioo pitää sisällään varsinaisen työn osuuden, jossa vanhaa järjestelmäää lähde- huo- tään muokkaamaan koulun tarkoitukseen sopivaksi. Osio pitää sisällään myöss mioita ja ongelmia mitä projektinn aikana ilmaantui. Tampereen ammattikorkeakoulun ostama käytetty robottisolu oli purettuna Trimaster Oy:n hallissa (Kuvio 26). Solun alkuperäisenä tarkoituksena oli toimia demonstraa- so- tio ympäristönä erilaisissa messutapahtumissa. Tämän jälkeen robotti oli purettu lusta, koska sitä oli testattu erilaisissa kappaleenkäsittely tarkoituksissa Trimaster Oy:ssä. Kehityshanke alkoi osaltani Trimaster Oy:n hallissa, missä m robottisolu oli purettuna ja toimimattomana. Kuvio 26. Robotti solusta purettuna




















49 49 (88) Kuvio 27. Tuleva alusta 6.1 Robottisolun kokoaminen Robottisolun kokoamisen aloitinn raivaamalla kaikki irrotetut johdot, pultit ynna muut irtotavaratt solun sisäpuolelta pois (Kuvio 27). Tämän jälkeen solun yksi hajanainen seinämä purettiin ja tarpeettomiaa tukirakenteita poistettiin. Hajanaisen seinänn tilalle päätettiin asentaa valoverho esteettömän koulutuskäytön mahdollistamiseksi. Solusta poistettiin myös viisi halogeenivalaisinta ja aikaisemmin käytössä ä olleita työtasoja. Robotti oli hallissa pakattuna siirtolavalle (Kuvio 26). Myös robotin ohjauskaappi ja soluosa olivat irrotettu toisistaann (Kuvio 28) ). Robottisolun kokoamisen aloitin nostamalla hallinosturin avulla robottisolun ohjainkaapin päälle. p Tämän jälkeen Itse I

, tehtiinn")


. Koska robotti")










50 50 (88) robotti nostettiin paikoilleen soluun (Kuvio 29), tehtiinn tarvittavat sähkökytkennät ja jatkettiin ylimääräisten osien poistamista (Kuvio 30). Koska robotti oli ollut käytössä aikaisemmissa projekteissa ja nimenomaan ko- nenäkösovelluksissa, ei I/O kytkentöjä tehty aluksi mitenkään koulua ajatellen loogi- käytettiin vanhoja tulojen ja lähtöjen nimiä. semmaksi. Kaikki johdot kytkettiin vanhoihin I/O paikkoihin ja robotin testauksessa Koululle tullessa robottisolussa oli vielä käytössä konenäkötoiminto, mutta se jätet- tiin pois ästä työstä aiheen laajuuden takia. Kuvio 28. Robotin ohjauskaappii
















































51 51 (88) Kuvio 29. Robotti kiinnitettynä alustaansa Kuvio 30. Solun siistimistä




")


")
.")




, joihin jokaiseen voidaan")
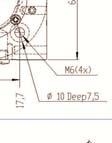
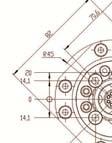
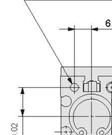
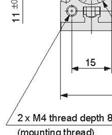
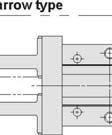
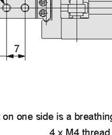
52 52 (88) 6.2 Työkalunvaihtaja Robottisolun monikäyttöisyydenn parantamiseksi robottisoluun päätettiin hankkia työkalunvaihtaja (Kuvio 31). Tämä RSP robot system:sin 20 kg:n nostokyvynn omaa- va vaihtajaa (M0107-1) mahdollistaa useiden erilaisten työkalujen t käytön robot- (M5 tisolussa. Työkalunvaihtaja sisältää mahdollisuuden neljälle paineilmalähdölle liitäntä) ja neljälle elektroniselle liitännälle (M8). Järjestelmässä itsessään on kuusi paineilmaliitäntää, mutta kaksi niistä on varattu työkalun kiinnipitämiseen / irrotta- miseen. /7, s. 5/ Kuvio 31. Työkalunvaihtaja Robottisoluun hankittiin neljä adapteriosaa (Kuvio 32), joihin jokaiseen voidaan ra- on kentaa oma työkalu liitäntöjen mahdollistavalla tavalla. Työkalujaa suunniteltaessa huomioitava paineilmaliitäntöjenn toiminta. Liitännät toimivat pareittain, jolloin käy-




 mallisia paineilmatoimisia tarttujia.")
 teetettiin la- taa opetuskäytössä")
53 53 (88) tettäessä esimerkiksi vain kahta paineilmaliitäntää on kaksi k jäljellee jäänyttä paikkaa tukittava, paineilman karkaamisen estämiseksi. Työkalunvaihtajann mitat ja tiedot löytyvät liitteestä 2. Kuvio 32. Työkalunvaihtajan adapteriosa 6.3 Työkalut Robottiin suunniteltiin kokonaann uudet työkalut, koskaa vanhassa rakenteessa oli kiinteästi asennettunaa kääntyvävartinen tarrain. Tämän työkalun käyttö työkalun- liittämistää vaihtajan kanssa oli mahdotonta,, koska vanha rakenne ei mahdollistanut paineilman työkaluun Kaksoistarrain Kaksoistarraimessa (Kuvio 34) tarttujina käytettiin SMC:n MHZ2-16D2 (Kuvio 33) mallisia paineilmatoimisia tarttujia. Kahden tarttujan rakenne työkalussa mahdollis- harjoittelun oppimisympäristössä. Kaksoistarraimen runko (Kuvioo 35) teetettiin la- taa opetuskäytössä monipuolisien n liikeratojen ja tehokkaan objektien poimimisen serleikattuna HT-laserilla ja koottiin koululla. Tarttujann tiedot löytyvät liitteestä 3.



























54 54 (88) Kuvio 33. Tarttuja MHZ2-16D2 2 Kuvio 34. Kaksoistarrain






55 55 (88) Kuvio 35. Kaksoistarraimen suunnitelma Kääntyvätarrain Robottisolussa oli alun perin vainn yksi työkalu, joka olii kiinteästi asennettu kääntyvä tarrain. Tätä työkaluaa päätettiin käyttää hyväksi niin paljon kuin mahdollista, vaikka sen alkuperäinen rakenne ei suoraan mahdollistanut työkalun käyttämistä työkalun- kiinnitys työkalunvaihtajaan sopivaksi. Ratkaisuna päädyttiin tekemään siihen sopi- vaihtajan kanssa. Alkuperäinen kääntyvä tarrain piti aluksi purkaa kokonaan ja suunnitella tarttujan van adapterin (Kuvio 36), mikä mahdollisti vanhan työkalun rungon kiinnittämisen työkalunvaihtajan adapteriosaan. Tämä uusi työkalu (Kuviot 37 jaa 38) mahdollistaa esineiden poimimisen erilaisista asennoista verrattuna kiinteään k kaksoistarraimeen.

























56 56 (88) Kuvio 36. Adapteri Kuvio 37. Kääntyvä tarrain sivusta
















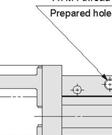
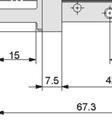
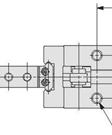
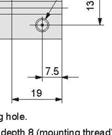
57 57 (88) Kuvio 38.. Kääntyvä tarrain t edestä Työkalunvaihtajan telinee Robottisoluun suunniteltiin työkalunvaihtajaa varten teline, johon työkalunvaihtajas- ta voidaan varastoidaa erilaisia työkaluja. Suunnittelussaa käytettiin hyväksi työkalun- vaihtajaan hankittavaksi tarkoitettujen työkalunpitimienn rakennettaa (Kuvio 39), jonka pohjalta robottisoluun suunniteltiin oma nelipaikkainenn työkaluteline (Kuvio 40). Telineen koon määräsi valmiidenn kiinnitysreikien paikka robottisolun pohjalevyssä.






















58 58 (88) Kuvio 39. Alkuperäinen työkaluteline Kuvio 40.. Nelipaikkainen työkaluteline Paineilmaliitännän lisääminen Koska robottisolussa ei ollut mitään mielekkäästi toteutettua paineilmaliitäntää, oli soluun mietittävä liitännälle hyvää paikka ja toteutus. Solun ulkopuolella löytyi ohja- usyksikön ovien vierestä hyvä paikka paineilmaletkun kiinnittämiseksi. Solun seiolpa- nään porattiin reikä ja kiinnitettiin sopiva pikaliitin (Kuvio 41). Tämä paikka ras, koska se mahdollisti luontevimman kiinnityksen huoltoyksikölle.










59 59 (88) Kuvio 41. Paineilmaletkun kiinnitys Solun ohjauskaapin sisäpuolelle kiinnitettiinn huoltoyksikkö. Huoltoyksikkö sisältää ilmankuivaimen ja paineenalennusventtiilinn (Kuvio 42) ), joidenka tarkoituksena on estää ylipaineen muodostumisenn ja kosteuden kertymisen robotin paineilmajärjes- robotin paineilmaliitäntään (Kuvio telmään. Paineeksi säädettiin 7 baarin paine. Huoltoyksiköstä johdettiin käyttöpaine 43).



























60 60 (88) Kuvio 42. Huoltoyksikkö Kuvio 43. Paineilmaliitäntä robotille
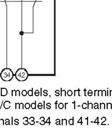
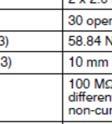
61 61 (88) 6.4 Turvaratkaisut Robottisolun turvallisuusasiat ovat ensiarvoisen tärkeitä, jotta vältytään robotin käsittelyn aikana onnettomuuksilta. Robottisolun turvallista käyttöä lisääviä turvaratkaisuja ovat muun muassa: turvareleet, valoverhot, rajakytkimet ja muut robotin liikealueelle menemistä estävät esteet. Tässä kappaleessa käsitellään robottisolussa käytettäviä turvaratkaisuja Valoverho Koska robottisolusta poistettiin yksi robotin työskentelyalueelle pääsyn estävä muoviseinä, päätettiin robotin työskentelyalueelle pääsyä ja koulutuskäyttöä helpottamaan hankkia turvallisuusratkaisuksi valoverho (Kuvio 44). Erilaisia vaihtoehtoja katsottaessa ja robottisolun hankintaan varatussa budjetissa päädyimme rahavaroja hallinnoivan tahon kanssa Omronin MS-4800 malliseen valoverhoon. Tämä turvakategorian luokan neljä valoverhona (sormisuojaus) on riittävä tämän robottisolun suojaamiseksi henkilövahingoilta (maksimi etäisyys 7m, resoluutio 14mm). Valoverhon kytkentäkaavio löytyy liitteestä 4.


























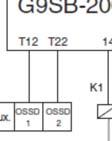
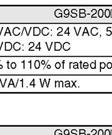
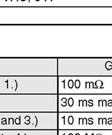
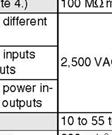
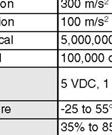
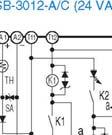
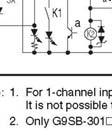
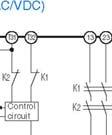
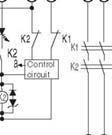
62 62 (88) HUOM! Valoverhoo ei ole käytössä käsiajotilassa Kuvio 44. Valoverhoo Turvarele Robottisoluun hankittiin ensin Omronin G9SB-200-d mallinen m kapea turvareleyksik- toisen kö (Kuvio 45). Yksikköä liitettäessä robottiin ongelmaksi muodostui robotin AS (Amergy Stop) piirin laukeaminen. Koska kyseisellä turvareleellä ei saatu motästä lempia AS-piirejä laukaistua samaan aikaan, jätettiin kyseinen turvarele pois työstä. Turvarele lisättiin toisenaa oppilastyönä robottisoluun. Käytössä olleen turva- releen tiedot löytyvätt liitteestä 5..























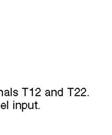
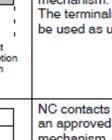
63 63 (88) Kuvio 45. Omronin turvareleykst sikkö Ovien rajakytkimet Alkuperäiseen robottisolun oviinn oli kytkettynä kaksi ovikytkintä. o Näiden tarkoituk- Ovikytkimet jätettiin robottisoluun toimivana turvaratkaisuna. Ovikytkimien mallina sena on estää henkilövahingot, mikäli ovet avataan kesken ohjelman suorittamisen. on Omron D4DS-15FS (Kuvio 46). Ovirajoen toimintakaavio löytyy liitteestä 6.



















64 64 (88) Kuvio 46. Ovien rajakytkimet 6.5 Robotin ohjelmiston päivittäminenn Robotin ohjelma päivitettiin uusimpaan versioon koska robottisolu oli hankittu sillä edellytyksellä, että ä siinä on uusimmat saatavilla olevat ohjelmat. Robotin ohjelmaversio oli hankittaessa Päivitys toteutettiin yhteistyössä ä ABB:n Juha Mainion kanssa puhelintukena. Saman päivityksen kanssa robottiin lisättiin uutena optiona worldzones, mikä estää ohjel- mallisesti robotin kolaroimisen rakenteiden kanssa. Tällöin robotille määritetään alue, jonka ulko-, tai sisäpuolellee robotin käsivarsi ei saa mennä missään tilanteessa. Aluksi vanhasta kokoonpanosta otettiin varmuuskopio,, jotta ongelmatilanteiden il- kohdan maantuessa saataisiin solu taas toimimaan vanhalla ohjelmistolla. Tämän jälkeen puhelinohjeistuksen kanssa loin robot studion System Builderr avulla uuden järjestelmä kokoonpanon. Uuden aktivointiavaimen sain puhelimen välityksellä. Uuden järjestelmän latauksen jälkeen robotti käynnistettiin I-startilla, jolloin robotin uusi ohjelmisto tuli toimivaksi. Päivitetyn ohjelmiston tiedot löytyvät liitteestä 7. /8/
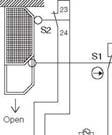
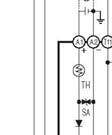
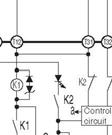
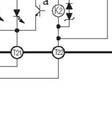
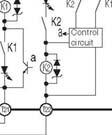
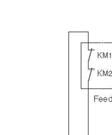
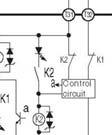
65 65 (88) 7 Havaintoja ja ongelmia Robottisolun käyttöönotossa ilmeni useita ongelmia. Ongelmat johtuivat pääsääntöisesti siitä, että käyttöönotossa pyrittiin käyttämään mahdollisimman paljon olemassa olevia asetuksia ja välineitä. Robottisolussa oli oikaistu useissa I/O kytkennöissä, koska robottisolua oli käytetty pääsääntöisesti messuesittelyissä. Ovien turvakytkimet olivat kytketty sarjaan, vaikka molempien ovien kytkimet olisi pitänyt kytkeä erikseen robotille. Näin oli toimittu sen takia, että robotille ei tarvinnut asentaa muun muassa turvarelettä ja robottisolu oli saatu nopeasti toimintakuntoon messuesittelyjä varten. Koska robottisolussa ei ollut muita turvallisuuteen vaikuttavia kytkimiä, oli robotti silloin helppo ohjelmoida toimimaan oikein. Nämä kytkennät aiheuttivat ongelmia turvareleen kanssa, kun robottisoluun oli lisätty valoverho. Kun ovi tai valoverho laukaisi hälytyksen kesken robotin automaattiajon, laukaisi se vain toisen AS (Amergy stop) piirin. Tällöin robotti ilmoitti virheilmoituksena että vain toinen piiri on lauennut, vaikka molemmat näyttivät olevan lauenneet (Kuvio 47). Syy ilmoitukseen oli, että molempien piirien piti laueta samalla hetkellä. Tätä ongelmaa ei saatu korjattua ensimmäiseksi ostetulla turvareleellä, koska molemmat AS piirit tulisi laukaista yhtä aikaa, riippumatta siitä aiheuttiko ovet vai valoverho hälytyksen. Hankittu turvarele sisälsi vain yhden kanavan, jolloin molempien AS piirien laukaisemista ei pystytty toteuttamaan minkäänlaisella kytkennällä kyseisellä releellä (Kuvio 48). Turvarele korvattiin oppilastyönä tehtynä ohjelmoitavalla turvareleellä. Toinen ongelma oli robottisolussa käytetty konenäköominaisuus. Robotissa oli aikaisempien ohjelmointien seurauksena melkein kolmekymmentä hankalasti nimettyä I/O:ta, joiden nimeämistä ei voinut muuttaa opetuskäyttöön sopiviksi, koska silloin konenäkö ei toiminut oikein. Tämän takia konenäköominaisuus jätettiin tästä työstä pois ja samalla I/O:t saatiin nimettyä opetuskäyttöön paremmin sopiviksi. Ko-


























66 66 (88) nenäköohjelmisto määräsi tarkasti miten eri laitteet pitää nimetä, jotta se olisii toimi- va kyseisellä kokoonpanolla. Kuvio 47. AS piirien merkkivalot Kuvio 48. AS piirien kytkentä paikka
67 67 (88) 8 Yhteenveto Työn valmistuttua voidaan sanoa, että se oli huomattavasti haasteellisempi, kuin osasin odottaa. Aihe oli minulle entuudestaan vähän vieras ja manuaaleista opiskelu ei heti tuottanut toivottua tulosta. ABB:n Juha mainion pidettyä koulutuspäivän robotin toiminnoista ja ohjelmoinnin peruskomentojen selvittyä alkoi työ vasta toden teolla edistyä. Työn olisi voinut toteuttaa muillakin tavoilla, mutta koska tarkoitus oli saada robottisolu toimimaan opetusympäristössä käyttäen mahdollisimman paljon robottisolun vanhoja tarvikkeita päädyin nykyiseen ratkaisuun.
68 68 (88) Lähteet /1/ IRC5 ohjelmoinnin perusteet /2/ IRCwithFlexPendant /3/ Introduction to RAPID /4/ Technical reference manual /5/ Keskustelut Trimaster Oy:n henkilöstön kanssa /6/ Rapid reference manual /7/ Product Manual Swivel with Tool Changer 20 kg /8/ Puhelinkeskustelu ABB:n Juha Mainion kanssa
69 69 (88) Liitteet 1. Muut käytettävissä olevat datatyypit 2. Työkalunvaihtaja 3. Tarttujan tiedot 4. Valoverhon kytkentä 5. Turvareleen tiedot 6. Ovirajojen toiminta ja tiedot 7. Robotin ohjelmiston tiedot
70 70 (88) Liite 1: Muut käytettävissä olevat datatyypit aiotrigg - Analog I/O trigger condition btnres - Push button result data busstate - State of I/O bus buttondata - Push button data byte - Integer values clock - Time measurement confdata - Robot configuration data corrdescr - Correction generator descriptor datapos - Enclosing block for a data object dionum - Digital values (0-1) dir - File directory structure dnum - Double numeric values errdomain - Error domain errnum - Error number errstr - Error string errtype - Error type event_type - Event routine type exec_level - Execution level extjoint - Position of external joints handler_type - Type of execution handler icondata - Icon display data
71 71 (88) identno - Identity for move instructions intnum - Interrupt identity iodev - Serial channels and files iounit_state - State of I/O unit 3.27 jointtarget - Joint position data listitem - List item data structure loaddata - Load data loadidnum - Type of load identification loadsession - Program load session mecunit - Mechanical unit motsetdata - Motion settings data opcalc - Arithmetic Operator opnum - Comparison operator orient - Orientation paridnum - Type of parameter identification paridvalidnum - Result of ParIdRobValid pathrecid - Path recorder identifier pos - Positions (only X, Y and Z) pose - Coordinate transformations progdisp - Program displacement rawbytes - Raw data restartdata - Restart data for trigg signals rmqheader - RAPID Message Queue Message header
72 72 (88) rmqmessage - RAPID Message Queue message rmqslot - Identity number of an RMQ client robjoint - Joint position of robot axes robtarget - Position data shapedata - World zone shape data signalxx - Digital and analog signals socketdev - Socket device socketstatus - Socket communication status speeddata - Speed data stoppointdata - Stop point data stringdig - String with only digits switch - Optional parameters symnum - Symbolic number syncident - Identity for synchronization point System data - Current RAPID system data settings taskid - Task identification tasks - RAPID program tasks testsignal - Test signal tooldata - Tool data tpnum - FlexPendant window number trapdata - Interrupt data for current TRAP triggdata - Positioning events, trigg triggios - Positioning events, trigg
73 73 (88) triggstrgo - Positioning events, trigg tunetype - Servo tune type uishownum - Instance ID for UIShow wobjdata - Work object data wzstationary - Stationary world zone data wztemporary - Temporary world zone data zonedata - Zone data











74 Liite 2: Työkalunvaihtaja 74 (88)

















75 75 (88)

")



76 Liite 3: Tarttujan tiedot 76 (88)

77 Liite 4: Valoverhon kytkentä 77 (88)












78 Liite 5: Turvareleen tiedot 78 (88)


79 79 (88)



80 80 (88)






81 81 (88)


82 82 (88)









83 83 (88)


84 84 (88)
85 85 (88)







86 Liite 6: Ovirajojen toiminta ja tiedot 86 (88)
ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2014
 v. 2014") ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2014 Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Kuljettimelle 10 saapuva
ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2014 Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Kuljettimelle 10 saapuva
Liikeradan luonti geometriasta ja synkronointi oikean robotin IRB6620 kanssa
 ROBOTIIKAN JATKOKURSSI Sisältö: 1. RAPID ohjelmointikieli (4 x 3 h) Kertausta (Rapidkertaus.docx) Uudet käskyt ja funktiot Robottien konfigurointi (Virtuaalirobotilla harjoitellaan) Laboraatiot (IRB 4400
ROBOTIIKAN JATKOKURSSI Sisältö: 1. RAPID ohjelmointikieli (4 x 3 h) Kertausta (Rapidkertaus.docx) Uudet käskyt ja funktiot Robottien konfigurointi (Virtuaalirobotilla harjoitellaan) Laboraatiot (IRB 4400
ROBOTIIKAN LABORATORIOTYÖ 2 ( )
") ROBOTIIKAN LABORATORIOTYÖ 2 (2016 17) Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Robotin tehtävänä on tyhjentää lava. Laatikot
ROBOTIIKAN LABORATORIOTYÖ 2 (2016 17) Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Robotin tehtävänä on tyhjentää lava. Laatikot
GSM OHJAIN FF KÄYTTÖOHJE PLC MAX S03
 GSM OHJAIN FF KÄYTTÖOHJE PLC MAX S03 TRIFITEK FINLAND OY 2012 V1.0 1. OHJELMISTO; ASENTAMINEN, KÄYTTÖ 1.1 Ohjelmiston asentaminen tietokoneeseen, Ajurin asentaminen Laitteen mukana toimitetaan muistitikulla
GSM OHJAIN FF KÄYTTÖOHJE PLC MAX S03 TRIFITEK FINLAND OY 2012 V1.0 1. OHJELMISTO; ASENTAMINEN, KÄYTTÖ 1.1 Ohjelmiston asentaminen tietokoneeseen, Ajurin asentaminen Laitteen mukana toimitetaan muistitikulla
Tulosta yrityksesi tuloslaskelma ja tase myöhempää tarkastusta varten. Ota varmuuskopio tilanteesta ennen tilimuunnosta.
 Tilimuunnosohje 1 (5) Tilimuunnosajo Tilimuunnosajo täytyy tehdä jos halutaan vaihtaa yritykselle tilikartta ja säilyttää tilien tapahtumat. Tilikartan vaihtoa varten perustetaan uusi yritys, jonne muunnosajossa
Tilimuunnosohje 1 (5) Tilimuunnosajo Tilimuunnosajo täytyy tehdä jos halutaan vaihtaa yritykselle tilikartta ja säilyttää tilien tapahtumat. Tilikartan vaihtoa varten perustetaan uusi yritys, jonne muunnosajossa
ATK tähtitieteessä. Osa 3 - IDL proseduurit ja rakenteet. 18. syyskuuta 2014
 18. syyskuuta 2014 IDL - proseduurit Viimeksi käsiteltiin IDL:n interaktiivista käyttöä, mutta tämä on hyvin kömpelöä monimutkaisempia asioita tehtäessä. IDL:llä on mahdollista tehdä ns. proseduuri-tiedostoja,
18. syyskuuta 2014 IDL - proseduurit Viimeksi käsiteltiin IDL:n interaktiivista käyttöä, mutta tämä on hyvin kömpelöä monimutkaisempia asioita tehtäessä. IDL:llä on mahdollista tehdä ns. proseduuri-tiedostoja,
ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2015
 v. 2015") ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2015 Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Robotin tehtävänä on
ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2015 Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Robotin tehtävänä on
MultiBoot. Käyttöopas
 MultiBoot Käyttöopas Copyright 2006 Hewlett-Packard Development Company, L.P. Tässä olevat tiedot voivat muuttua ilman ennakkoilmoitusta. Ainoat HP:n tuotteita ja palveluja koskevat takuut mainitaan erikseen
MultiBoot Käyttöopas Copyright 2006 Hewlett-Packard Development Company, L.P. Tässä olevat tiedot voivat muuttua ilman ennakkoilmoitusta. Ainoat HP:n tuotteita ja palveluja koskevat takuut mainitaan erikseen
XCRANE OMINAISUUDET KUUSI KULJETTAJA-PROFIILIA VENTTIILIEN SÄÄDÖT
 XCRANE OMINAISUUDET KUUSI KULJETTAJA-PROFIILIA Jokaiseen kuljettajaprofiiliin voi tallentaa omat säädöt seuraaville ominaisuuksille Venttiilin parametrit o Miniminopeus (ma) o Maksiminopeus (%) o Rampit
XCRANE OMINAISUUDET KUUSI KULJETTAJA-PROFIILIA Jokaiseen kuljettajaprofiiliin voi tallentaa omat säädöt seuraaville ominaisuuksille Venttiilin parametrit o Miniminopeus (ma) o Maksiminopeus (%) o Rampit
MASSER Loader V2.00. käyttö- ja asennusohje 5.5.2014
 MASSER Loader V2.00 käyttö- ja asennusohje 5.5.2014 Masser Oy Tel. +358 400 904 500 BID No 0665142-9 Jämytie 1 Fax. +358 16 282 554 VAT No. FI06651429 FI-96910 Rovaniemi, Finland Domicile Rovaniemi OHJELMAN
MASSER Loader V2.00 käyttö- ja asennusohje 5.5.2014 Masser Oy Tel. +358 400 904 500 BID No 0665142-9 Jämytie 1 Fax. +358 16 282 554 VAT No. FI06651429 FI-96910 Rovaniemi, Finland Domicile Rovaniemi OHJELMAN
IDL - proseduurit. ATK tähtitieteessä. IDL - proseduurit
 IDL - proseduurit 25. huhtikuuta 2017 Viimeksi käsiteltiin IDL:n interaktiivista käyttöä, mutta tämä on hyvin kömpelöä monimutkaisempia asioita tehtäessä. IDL:llä on mahdollista tehdä ns. proseduuri-tiedostoja,
IDL - proseduurit 25. huhtikuuta 2017 Viimeksi käsiteltiin IDL:n interaktiivista käyttöä, mutta tämä on hyvin kömpelöä monimutkaisempia asioita tehtäessä. IDL:llä on mahdollista tehdä ns. proseduuri-tiedostoja,
Topfieldin sarjaporttipäivitystyökalun asennus(rs232)
") Topfieldin sarjaporttipäivitystyökalun asennus(rs232) Oheinen kuvasarja selitysteksteineen opastaa sinut onnistuneesti päivittämään Topfield -vastaanottimesi. - Lataa sarjaportti -päivitystyökalu -sivustolta
Topfieldin sarjaporttipäivitystyökalun asennus(rs232) Oheinen kuvasarja selitysteksteineen opastaa sinut onnistuneesti päivittämään Topfield -vastaanottimesi. - Lataa sarjaportti -päivitystyökalu -sivustolta
Turvallinen veneily -näyttö. VesselView-ohjelmiston päivittäminen. Automaattinen WiFi-haku. Micro SD -kortin käyttäminen. Osa 1 - Alkuvalmistelut
 Turvallinen veneily -näyttö Kun VesselView käynnistetään sen oltua sammutettuna vähintään 30 sekuntia, näyttöön tulee turvalliseen veneilyyn liittyviä ohjeita sisältävä ikkuna. Jatka painamalla Accept
Turvallinen veneily -näyttö Kun VesselView käynnistetään sen oltua sammutettuna vähintään 30 sekuntia, näyttöön tulee turvalliseen veneilyyn liittyviä ohjeita sisältävä ikkuna. Jatka painamalla Accept
Kopioi cd-levyt kiintolevylle, niin fyysiset levyt joutavat eläkkeelle.
 TEE KONEESTA CD-VARASTO: Kopioi cd-levyt kiintolevylle, niin fyysiset levyt joutavat eläkkeelle. Siirrä cd-levysi TIETOJA Kopioi cd-levyt kiintolevylle levykuviksi, niin pääset sisältöön nopeasti käsiksi
TEE KONEESTA CD-VARASTO: Kopioi cd-levyt kiintolevylle, niin fyysiset levyt joutavat eläkkeelle. Siirrä cd-levysi TIETOJA Kopioi cd-levyt kiintolevylle levykuviksi, niin pääset sisältöön nopeasti käsiksi
MPCC-työkalua voidaan käyttää yhden laitteen valvontaan ja yhden tai useamman laitteen konfigurointiin (Modbus broadcast, osoite 0).
.") V1.0.0 (14.10.2015) 1 (7) KYTKENTÄ HUOM: toimii Modbus-masterina. Tämän vuoksi toinen mahdollinen Modbus-master on irrotettava verkosta, kun kytketään valmiiseen Modbus-verkkoon. Produalin Modbus-laitteiden
V1.0.0 (14.10.2015) 1 (7) KYTKENTÄ HUOM: toimii Modbus-masterina. Tämän vuoksi toinen mahdollinen Modbus-master on irrotettava verkosta, kun kytketään valmiiseen Modbus-verkkoon. Produalin Modbus-laitteiden
Käyttöohje Vallox MagiCAD konfiguraattori
 Käyttöohje Vallox MagiCAD konfiguraattori Version 2011.9.1 Sisältö Vallox Konfiguraattori... 1 Konfiguraattorin asentaminen... 1 Tarvittavat ohjelmat... 1 Asennus... 1 Ohjelman käynnistäminen... 2 Konfiguraattorin
Käyttöohje Vallox MagiCAD konfiguraattori Version 2011.9.1 Sisältö Vallox Konfiguraattori... 1 Konfiguraattorin asentaminen... 1 Tarvittavat ohjelmat... 1 Asennus... 1 Ohjelman käynnistäminen... 2 Konfiguraattorin
OptimePortal ja OptimeEvent versioiden yhteenveto joulukuu
 OptimePortal 1.12.2 ja OptimeEvent 1.16.1 versioiden yhteenveto joulukuu 2016 www.helsinki.fi/yliopisto 1 Tilavaraus Tilavarauspyyntöä luotaessa laskutusyksikkö (ns. H-koodi) voidaan nyt valita viimeisessä
OptimePortal 1.12.2 ja OptimeEvent 1.16.1 versioiden yhteenveto joulukuu 2016 www.helsinki.fi/yliopisto 1 Tilavaraus Tilavarauspyyntöä luotaessa laskutusyksikkö (ns. H-koodi) voidaan nyt valita viimeisessä
RAPID-ohjelmointikielen peruskäskyjä ja rakenteita
 RAPID-ohjelmointikielen peruskäskyjä ja rakenteita Ohjelmamoduli, Mainmodule Ohjelmadata Num Numeeriset arvot (rekisterit, laskurit) Bool Loogiset arvot (tosi/epätosi, true/false) Robtarget Paikoitusdata
RAPID-ohjelmointikielen peruskäskyjä ja rakenteita Ohjelmamoduli, Mainmodule Ohjelmadata Num Numeeriset arvot (rekisterit, laskurit) Bool Loogiset arvot (tosi/epätosi, true/false) Robtarget Paikoitusdata
Maastotietokannan torrent-jakelun shapefile-tiedostojen purkaminen zip-arkistoista Windows-komentojonoilla
 Maastotietokannan torrent-jakelun shapefile-tiedostojen purkaminen zip-arkistoista Windows-komentojonoilla Viimeksi muokattu 5. toukokuuta 2012 Maastotietokannan torrent-jakeluun sisältyy yli 5000 zip-arkistoa,
Maastotietokannan torrent-jakelun shapefile-tiedostojen purkaminen zip-arkistoista Windows-komentojonoilla Viimeksi muokattu 5. toukokuuta 2012 Maastotietokannan torrent-jakeluun sisältyy yli 5000 zip-arkistoa,
Moottorin kierrosnopeus Tämän harjoituksen jälkeen:
 Moottorin kierrosnopeus Tämän harjoituksen jälkeen: osaat määrittää moottorin kierrosnopeuden pulssianturin ja Counter-sisääntulon avulla, osaat siirtää manuaalisesti mittaustiedoston LabVIEW:sta MATLABiin,
Moottorin kierrosnopeus Tämän harjoituksen jälkeen: osaat määrittää moottorin kierrosnopeuden pulssianturin ja Counter-sisääntulon avulla, osaat siirtää manuaalisesti mittaustiedoston LabVIEW:sta MATLABiin,
Ohjeet e kirjan ostajalle
 1 Ohjeet e kirjan ostajalle 1. Ostaminen ja käyttöönotto 1.1. Näin saat e kirjan käyttöösi Lataa tietokoneellesi Adobe Digital Editions (ADE) ohjelma täältä: http://www.adobe.com/products/digitaleditions/.
1 Ohjeet e kirjan ostajalle 1. Ostaminen ja käyttöönotto 1.1. Näin saat e kirjan käyttöösi Lataa tietokoneellesi Adobe Digital Editions (ADE) ohjelma täältä: http://www.adobe.com/products/digitaleditions/.
TALLENNETAAN MUISTITIKULLE JA MUISTIKORTILLE
 TALLENNETAAN MUISTITIKULLE JA MUISTIKORTILLE HERVANNAN KIRJASTON TIETOTORI Insinöörinkatu 38 33720 Tampere 040 800 7805 tietotori.hervanta@tampere.fi TALLENNETAAN MUISTIKULLE JA MUISTIKORTILLE 1 Muistitikun
TALLENNETAAN MUISTITIKULLE JA MUISTIKORTILLE HERVANNAN KIRJASTON TIETOTORI Insinöörinkatu 38 33720 Tampere 040 800 7805 tietotori.hervanta@tampere.fi TALLENNETAAN MUISTIKULLE JA MUISTIKORTILLE 1 Muistitikun
erasmartcardkortinlukijaohjelmiston
 erasmartcardkortinlukijaohjelmiston asennusohje Sisällysluettelo 1. erasmartcard... 2 2. erasmartcard-ohjelmiston normaali asennus... 3 2.1. Ennen asennusta... 3 2.2. Asennus... 3 3. Muut asennustavat...
erasmartcardkortinlukijaohjelmiston asennusohje Sisällysluettelo 1. erasmartcard... 2 2. erasmartcard-ohjelmiston normaali asennus... 3 2.1. Ennen asennusta... 3 2.2. Asennus... 3 3. Muut asennustavat...
TIETOKONETEKNIIKAN LABORAATIOT V2.0 VHDL ohjelmoinnin perusteet
 TIETOKONETEKNIIKAN LABORAATIOT V2.0 VHDL ohjelmoinnin perusteet Työ: VHDL ohjelmoinnin perusteet & Quartus II ohjelmiston käyttöönotto Tehnyt: Kari Huovinen Pvm: 26.4.2006 Lisäyksiä: Harri Honkanen 13.09.2007
TIETOKONETEKNIIKAN LABORAATIOT V2.0 VHDL ohjelmoinnin perusteet Työ: VHDL ohjelmoinnin perusteet & Quartus II ohjelmiston käyttöönotto Tehnyt: Kari Huovinen Pvm: 26.4.2006 Lisäyksiä: Harri Honkanen 13.09.2007
Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla.
 Speedohealer V4 Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla. 1. Esipuhe Onnittelemme sinua Speedohealer laitteen oston johdosta. HealTech Electronics Ltd. on omistautunut
Speedohealer V4 Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla. 1. Esipuhe Onnittelemme sinua Speedohealer laitteen oston johdosta. HealTech Electronics Ltd. on omistautunut
D-Link DSL-504T ADSL Reitittimen Asennusohje ver. 1.0
 D-Link DSL-504T ADSL Reitittimen Asennusohje ver. 1.0 Tervetuloa D-Link ADSL reitittimen omistajaksi. Tämän ohjeen avulla saat reitittimesi helposti ja nopeasti toimimaan. Tämä ohje kannattaa lukea läpi
D-Link DSL-504T ADSL Reitittimen Asennusohje ver. 1.0 Tervetuloa D-Link ADSL reitittimen omistajaksi. Tämän ohjeen avulla saat reitittimesi helposti ja nopeasti toimimaan. Tämä ohje kannattaa lukea läpi
Riistakameran käyttöohje
 Riistakameran käyttöohje Sisällysluettelo I. Pikakäyttöönotto... 2 1. Etupaneeli... 2 2. Alaosa ja virtakytkin... 3 Automaattinen infrapunakuvaustila... 3 Testitila... 3 Liitännät... 3 3. Patterin asettaminen...
Riistakameran käyttöohje Sisällysluettelo I. Pikakäyttöönotto... 2 1. Etupaneeli... 2 2. Alaosa ja virtakytkin... 3 Automaattinen infrapunakuvaustila... 3 Testitila... 3 Liitännät... 3 3. Patterin asettaminen...
Konfiguraatiotyökalun päivitys
 Konfiguraatiotyökalun päivitys Kuinka aloitan? Konfiguraatiotyökalu avataan niin kuin aiemminkin suoraan Tenstar clientin käyttöliittymästä, tai harjoituksen ollessa käynnissä. Kuinka aloitan konfiguraatiotyökalun
Konfiguraatiotyökalun päivitys Kuinka aloitan? Konfiguraatiotyökalu avataan niin kuin aiemminkin suoraan Tenstar clientin käyttöliittymästä, tai harjoituksen ollessa käynnissä. Kuinka aloitan konfiguraatiotyökalun
T&M Autori Versio Series 60 -puhelimiin
 T&M Autori Versio 5.0.0 Series 60 -puhelimiin Asennusohje 19. huhtikuuta 2010 TIETOMEKKA T&M Autori asennusohje - 2 SISÄLLYSLUETTELO SISÄLLYSLUETTELO 2 1. YLEISTÄ 3 2. UUDEN MUISTIKORTIN ASENNUS 3 3. T&M
T&M Autori Versio 5.0.0 Series 60 -puhelimiin Asennusohje 19. huhtikuuta 2010 TIETOMEKKA T&M Autori asennusohje - 2 SISÄLLYSLUETTELO SISÄLLYSLUETTELO 2 1. YLEISTÄ 3 2. UUDEN MUISTIKORTIN ASENNUS 3 3. T&M
Tämä on PicoLog Windows ohjelman suomenkielinen pikaohje.
 Tämä on PicoLog Windows ohjelman suomenkielinen pikaohje. Asennus: HUOM. Tarkemmat ohjeet ADC-16 englanninkielisessä User Manual issa. Oletetaan että muuntimen kaikki johdot on kytketty anturiin, käyttöjännite
Tämä on PicoLog Windows ohjelman suomenkielinen pikaohje. Asennus: HUOM. Tarkemmat ohjeet ADC-16 englanninkielisessä User Manual issa. Oletetaan että muuntimen kaikki johdot on kytketty anturiin, käyttöjännite
NAVITA BUDJETTIJÄRJESTELMÄN ENSIASENNUS PALVELIMELLE
 NAVITA BUDJETTIJÄRJESTELMÄN ENSIASENNUS PALVELIMELLE Ennen palvelinohjelman asennusta perustetaan tarvittavat kansiot. Oikeustasoista share- tai security-tason oikeudet riittävät; molempien oikeustasojen
NAVITA BUDJETTIJÄRJESTELMÄN ENSIASENNUS PALVELIMELLE Ennen palvelinohjelman asennusta perustetaan tarvittavat kansiot. Oikeustasoista share- tai security-tason oikeudet riittävät; molempien oikeustasojen
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 2.3.2009 T-106.1208 Ohjelmoinnin perusteet Y 2.3.2009 1 / 28 Puhelinluettelo, koodi def lue_puhelinnumerot(): print "Anna lisattavat nimet ja numerot." print
Ohjelmoinnin perusteet Y Python T-106.1208 2.3.2009 T-106.1208 Ohjelmoinnin perusteet Y 2.3.2009 1 / 28 Puhelinluettelo, koodi def lue_puhelinnumerot(): print "Anna lisattavat nimet ja numerot." print
Modulaatio-ohjauksen toimimoottori AME 85QM
 Modulaatio-ohjauksen toimimoottori AME 85QM Kuvaus AME 85QM -toimimoottoria käytetään AB-QM DN 200- ja DN 250 -automaattiisissa virtauksenrajoitin ja säätöventtiileissä. Ominaisuudet: asennon ilmaisu automaattinen
Modulaatio-ohjauksen toimimoottori AME 85QM Kuvaus AME 85QM -toimimoottoria käytetään AB-QM DN 200- ja DN 250 -automaattiisissa virtauksenrajoitin ja säätöventtiileissä. Ominaisuudet: asennon ilmaisu automaattinen
Visma Fivaldi -käsikirja Tehtävienhallinta- ohje käyttäjälle
 Visma Fivaldi -käsikirja Tehtävienhallinta- ohje käyttäjälle 2 Sisällys 1 Palvelunhallinta... 3 1.1 Käyttäjäryhmän luominen... 3 2 Tehtävienhallinta- perustiedot... 4 2.1 Yhtiön perustiedot... 4 2.2 Tehtävä-/
Visma Fivaldi -käsikirja Tehtävienhallinta- ohje käyttäjälle 2 Sisällys 1 Palvelunhallinta... 3 1.1 Käyttäjäryhmän luominen... 3 2 Tehtävienhallinta- perustiedot... 4 2.1 Yhtiön perustiedot... 4 2.2 Tehtävä-/
TRUST AMI MOUSE WIRELESS 300
 TRUST AMI MOUSE WIRELESS 300 Pika-asennusohje Versio 1.0 1 1. Johdanto Tämä käyttöohje on tarkoitettu Trust Ami Mouse Wireless 300 -tuotteen käyttäjille.voit liikkua hiiren avulla kaikissa lempisovelluksissasi
TRUST AMI MOUSE WIRELESS 300 Pika-asennusohje Versio 1.0 1 1. Johdanto Tämä käyttöohje on tarkoitettu Trust Ami Mouse Wireless 300 -tuotteen käyttäjille.voit liikkua hiiren avulla kaikissa lempisovelluksissasi
KONEISTUSKOKOONPANON TEKEMINEN NX10-YMPÄRISTÖSSÄ
 KONEISTUSKOKOONPANON TEKEMINEN NX10-YMPÄRISTÖSSÄ https://community.plm.automation.siemens.com/t5/tech-tips- Knowledge-Base-NX/How-to-simulate-any-G-code-file-in-NX- CAM/ta-p/3340 Koneistusympäristön määrittely
KONEISTUSKOKOONPANON TEKEMINEN NX10-YMPÄRISTÖSSÄ https://community.plm.automation.siemens.com/t5/tech-tips- Knowledge-Base-NX/How-to-simulate-any-G-code-file-in-NX- CAM/ta-p/3340 Koneistusympäristön määrittely
Finnish. Osien nimet. Tarkistuslaiteyksikkö. Sähkökaapelin tarkistuslaite. Vaihtokytkimen tarkistuslaite SM-EC79 HAKEMISTO
 SM-EC79 HAKEMISTO Tarkistuslaitteen käyttö Ongelman sijainnin määritys tarkistuslaitteella 136 Ongelma etuvaihtajassa tai takavaihtajassa 137 Ongelma SM-EW79A + ST-7970:n toiminnassa 139 SM-EW79A tarkistus
SM-EC79 HAKEMISTO Tarkistuslaitteen käyttö Ongelman sijainnin määritys tarkistuslaitteella 136 Ongelma etuvaihtajassa tai takavaihtajassa 137 Ongelma SM-EW79A + ST-7970:n toiminnassa 139 SM-EW79A tarkistus
Telecrane F24 Käyttö-ohje
 1 Telecrane F24 Käyttö-ohje Sisällysluettelo - F24 Takuu & turvallisuusohjeet 3 - Käyttöönotto / paristot / vastaanottimen virtalähde 4 - Tunnistuskoodin vaihto 6 - Vastaanottimen virtalähteen jännitteen
1 Telecrane F24 Käyttö-ohje Sisällysluettelo - F24 Takuu & turvallisuusohjeet 3 - Käyttöönotto / paristot / vastaanottimen virtalähde 4 - Tunnistuskoodin vaihto 6 - Vastaanottimen virtalähteen jännitteen
kokoaminen 1. Ota ASPER ajanottolaitteisto 1- kentän laatikosta ja siirrä kisakentälle 2. Kokoa yleisönäyttö sopivaa paikkaan ja vedä sille sähkö
 pikaopas ASPER ajanoton kokoaminen 1. Ota ASPER ajanottolaitteisto 1- kentän laatikosta ja siirrä kisakentälle 2. Kokoa yleisönäyttö sopivaa paikkaan ja vedä sille sähkö Sähköjenkytkentästä oma kohta.
pikaopas ASPER ajanoton kokoaminen 1. Ota ASPER ajanottolaitteisto 1- kentän laatikosta ja siirrä kisakentälle 2. Kokoa yleisönäyttö sopivaa paikkaan ja vedä sille sähkö Sähköjenkytkentästä oma kohta.
Videon tallentaminen Virtual Mapista
 Videon tallentaminen Virtual Mapista Kamera-ajon tekeminen Karkean kamera ajon teko onnistuu nopeammin Katseluohjelmassa (Navigointi > Näkymät > Tallenna polku). Liikeradan ja nopeuden tarkka hallinta
Videon tallentaminen Virtual Mapista Kamera-ajon tekeminen Karkean kamera ajon teko onnistuu nopeammin Katseluohjelmassa (Navigointi > Näkymät > Tallenna polku). Liikeradan ja nopeuden tarkka hallinta
Ohjeistus Auditorion laitteiden käyttämiseksi.
 Ohjeistus Auditorion laitteiden käyttämiseksi. Jatkuu seuraavalla sivulla Huomioi ensimmäiseksi nämä asiat: Kuvassa näkyvissä liitinlaatikoissa tulisi olla kaikki johdot paikallaan. Mikäli jokin kuvassa
Ohjeistus Auditorion laitteiden käyttämiseksi. Jatkuu seuraavalla sivulla Huomioi ensimmäiseksi nämä asiat: Kuvassa näkyvissä liitinlaatikoissa tulisi olla kaikki johdot paikallaan. Mikäli jokin kuvassa
1.3 Lohkorakenne muodostetaan käyttämällä a) puolipistettä b) aaltosulkeita c) BEGIN ja END lausekkeita d) sisennystä
 puolipistettä b) aaltosulkeita c) BEGIN ja END lausekkeita d) sisennystä") OULUN YLIOPISTO Tietojenkäsittelytieteiden laitos Johdatus ohjelmointiin 811122P (5 op.) 12.12.2005 Ohjelmointikieli on Java. Tentissä saa olla materiaali mukana. Tenttitulokset julkaistaan aikaisintaan
OULUN YLIOPISTO Tietojenkäsittelytieteiden laitos Johdatus ohjelmointiin 811122P (5 op.) 12.12.2005 Ohjelmointikieli on Java. Tentissä saa olla materiaali mukana. Tenttitulokset julkaistaan aikaisintaan
KÄYTTÖOHJE. M2M Point - to - Point
 KÄYTTÖOHJE M2M Point - to - Point M2M Paketti SISÄLLYSLUETTELO YLEISTÄ 1 KÄYTTÖÖNOTTO 1.1 LAITTEISTON ASENNUS 2 TULOJEN JA LÄHTÖJEN KYTKENTÄ 2.1 TILATIETOKYTKENNÄT 2.2 ANALOGIAKYTKENNÄT 3 KANAVANVAIHTO
KÄYTTÖOHJE M2M Point - to - Point M2M Paketti SISÄLLYSLUETTELO YLEISTÄ 1 KÄYTTÖÖNOTTO 1.1 LAITTEISTON ASENNUS 2 TULOJEN JA LÄHTÖJEN KYTKENTÄ 2.1 TILATIETOKYTKENNÄT 2.2 ANALOGIAKYTKENNÄT 3 KANAVANVAIHTO
Mikäli olet saanut e-kirjan latauslinkin sähköpostilla, seuraa näitä ohjeita e-kirjan lataamisessa.
 E-kirjan latausohje Mikäli olet saanut e-kirjan latauslinkin sähköpostilla, seuraa näitä ohjeita e-kirjan lataamisessa. Pikaohjeet 1. Varmista että tietokoneellesi on asennettu Adobe Digital Editions ohjelma.
E-kirjan latausohje Mikäli olet saanut e-kirjan latauslinkin sähköpostilla, seuraa näitä ohjeita e-kirjan lataamisessa. Pikaohjeet 1. Varmista että tietokoneellesi on asennettu Adobe Digital Editions ohjelma.
ASCII-taidetta. Intro: Python
 Python 1 ASCII-taidetta All Code Clubs must be registered. Registered clubs appear on the map at codeclubworld.org - if your club is not on the map then visit jumpto.cc/18cplpy to find out what to do.
Python 1 ASCII-taidetta All Code Clubs must be registered. Registered clubs appear on the map at codeclubworld.org - if your club is not on the map then visit jumpto.cc/18cplpy to find out what to do.
Pika-asennusohjeet Suomeksi
 Pika-asennusohjeet Suomeksi (Virallinen ohje löytyy asennuslevyltä Englanninkielisenä) Tulosta tämä ohje asennuksen avuksi. Ensiksi asennetaan itse ohjelma, sitten rekisteröidytään testerin käyttäjäksi
Pika-asennusohjeet Suomeksi (Virallinen ohje löytyy asennuslevyltä Englanninkielisenä) Tulosta tämä ohje asennuksen avuksi. Ensiksi asennetaan itse ohjelma, sitten rekisteröidytään testerin käyttäjäksi
WehoFloor RF LCD 868MHz & laajennusmoduuli 4 tai 6 kanavalle
 WehoFloor RF LCD 868MHz & laajennusmoduuli 4 tai 6 kanavalle KÄYTTÖOHJE WehoFloor RF LCD langaton kytkentäyksikkö (6 kanavalle) & laajennusmoduuli (4 tai 6 kanavalle) 868 MHz 2-6 1. KÄYTTÖOHJE WFHC langaton
WehoFloor RF LCD 868MHz & laajennusmoduuli 4 tai 6 kanavalle KÄYTTÖOHJE WehoFloor RF LCD langaton kytkentäyksikkö (6 kanavalle) & laajennusmoduuli (4 tai 6 kanavalle) 868 MHz 2-6 1. KÄYTTÖOHJE WFHC langaton
Windows Server 2012 asentaminen ja käyttöönotto, Serverin pyörittämisen takia tarvitaan
 Aram Abdulla Hassan Windows Server 2012 asentaminen ja käyttö 1 Windows Server 2012 asentaminen ja käyttöönotto, Serverin pyörittämisen takia tarvitaan Hyper-V ohjelma. Riipu minkälaista Serveria yritämme
Aram Abdulla Hassan Windows Server 2012 asentaminen ja käyttö 1 Windows Server 2012 asentaminen ja käyttöönotto, Serverin pyörittämisen takia tarvitaan Hyper-V ohjelma. Riipu minkälaista Serveria yritämme
ClassPad fx-cp400 OS2-päivitys. + Manager-ohjelmisto ja Physium-sovellus
 ClassPad fx-cp400 OS2-päivitys + Manager-ohjelmisto ja Physium-sovellus Käyttöjärjestelmän ja Add-in sovellusten päivityksestä Casio suosittelee aina viimeisimmän käyttöjärjestelmän asentamista. Tällöin
ClassPad fx-cp400 OS2-päivitys + Manager-ohjelmisto ja Physium-sovellus Käyttöjärjestelmän ja Add-in sovellusten päivityksestä Casio suosittelee aina viimeisimmän käyttöjärjestelmän asentamista. Tällöin
Kamera ohjelmoidaan ensin tunnistamaan kortit ja lähettämään tieto sarjaliikenneporttiin Data-linkin avulla.
 Ohjausjärjestelmien jatkokurssi kevät 2006 Laboraatiot 7-12 Laboraatio 7. Konenäkö robotiikassa Konenäkökamera liitetään robottiohjaimeen. Järjestelmä ohjelmoidaan niin, että robotti lajittelee kappaleita
Ohjausjärjestelmien jatkokurssi kevät 2006 Laboraatiot 7-12 Laboraatio 7. Konenäkö robotiikassa Konenäkökamera liitetään robottiohjaimeen. Järjestelmä ohjelmoidaan niin, että robotti lajittelee kappaleita
Väylään liitettävä laite: Pheonix Contact ILB PB DI8 DIO8
 Väylään liitettävä laite: Pheonix Contact ILB PB DI8 DIO8 Laite on DP-väylään kytketkettävä Digitaalinen 16-porttinen IO-moduuli. Porteista 8 on Inputteja ja toiset 8 valittavissa inputeksi tai outputeiksi.
Väylään liitettävä laite: Pheonix Contact ILB PB DI8 DIO8 Laite on DP-väylään kytketkettävä Digitaalinen 16-porttinen IO-moduuli. Porteista 8 on Inputteja ja toiset 8 valittavissa inputeksi tai outputeiksi.
Taitaja 2013, Mekatroniikka Turvalaitteet
 Taitaja 2013, Mekatroniikka Turvalaitteet Versio Tekijä Tarkastaja 1.0 PR 30.01.2013 1.1 AK 4.2.2013 1.2 PR 28.2.2013 1.3 AK 1.3.2013 Tulostettu: 2.5.2013 22:28 1(7) SÄLLYSLUETTELO 1. Perustiedot 3 1.1.
Taitaja 2013, Mekatroniikka Turvalaitteet Versio Tekijä Tarkastaja 1.0 PR 30.01.2013 1.1 AK 4.2.2013 1.2 PR 28.2.2013 1.3 AK 1.3.2013 Tulostettu: 2.5.2013 22:28 1(7) SÄLLYSLUETTELO 1. Perustiedot 3 1.1.
Käyttöpaneelin käyttäminen
 Tässä jaksossa on tietoja käyttöpaneelin käytöstä, tulostimen asetusten muuttamisesta ja käyttöpaneelin valikoiden sisällöstä. 1 Useimpia tulostimen asetuksia voi muuttaa sovellusohjelmasta tai tulostinajurista.
Tässä jaksossa on tietoja käyttöpaneelin käytöstä, tulostimen asetusten muuttamisesta ja käyttöpaneelin valikoiden sisällöstä. 1 Useimpia tulostimen asetuksia voi muuttaa sovellusohjelmasta tai tulostinajurista.
RockID-varastonhallintajärjestelmän käyttöohje. v. 1.0
 RockID-varastonhallintajärjestelmän käyttöohje v. 1.0 Yleistä Rockstar lukijakäyttöliittymä Tuotteiden lukeminen lähtevään tilaukseen Tilaukseen kuulumattomat tuotteet Tuotteiden lukeminen tilauksesta
RockID-varastonhallintajärjestelmän käyttöohje v. 1.0 Yleistä Rockstar lukijakäyttöliittymä Tuotteiden lukeminen lähtevään tilaukseen Tilaukseen kuulumattomat tuotteet Tuotteiden lukeminen tilauksesta
P6SLite ohjaus- ja zoom komennot
 1, Ohjaus zoom -toiminnot P6SLite ohjaus- ja zoom komennot Osa 1 pikanäppäintoiminnon Valitse APP-käyttöliittymää ja APP ilmestyy toimintopainikkeeseen. Paina + = ZOOM +, paina - = ZOOM-. 2, Manuaalinen
1, Ohjaus zoom -toiminnot P6SLite ohjaus- ja zoom komennot Osa 1 pikanäppäintoiminnon Valitse APP-käyttöliittymää ja APP ilmestyy toimintopainikkeeseen. Paina + = ZOOM +, paina - = ZOOM-. 2, Manuaalinen
1.3Lohkorakenne muodostetaan käyttämällä a) puolipistettä b) aaltosulkeita c) BEGIN ja END lausekkeita d) sisennystä
 puolipistettä b) aaltosulkeita c) BEGIN ja END lausekkeita d) sisennystä") OULUN YLIOPISTO Tietojenkäsittelytieteiden laitos Johdatus ohjelmointiin 81122P (4 ov.) 30.5.2005 Ohjelmointikieli on Java. Tentissä saa olla materiaali mukana. Tenttitulokset julkaistaan aikaisintaan
OULUN YLIOPISTO Tietojenkäsittelytieteiden laitos Johdatus ohjelmointiin 81122P (4 ov.) 30.5.2005 Ohjelmointikieli on Java. Tentissä saa olla materiaali mukana. Tenttitulokset julkaistaan aikaisintaan
KÄYTTÖOHJE HIRVIMATIC (2V0) 5.5.2010
 5.5.2010") 1 KÄYTTÖOHJE HIRVIMATIC (2V0) 5.5.2010 NÄPPÄIMISTÖ: Ohjelman valinta Asetukset /nollaus Ajastimen valinta (Ei vielä käytössä) Ohjaus oikealle / lisää asetusta / ajastimen käynnistys Seis / valinnan vahvistus
1 KÄYTTÖOHJE HIRVIMATIC (2V0) 5.5.2010 NÄPPÄIMISTÖ: Ohjelman valinta Asetukset /nollaus Ajastimen valinta (Ei vielä käytössä) Ohjaus oikealle / lisää asetusta / ajastimen käynnistys Seis / valinnan vahvistus
HARJOITUSTYÖ: LabVIEW, Kiihtyvyysanturi
 Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: LabVIEW, Kiihtyvyysanturi Tarvittavat laitteet: PC Labview
Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: LabVIEW, Kiihtyvyysanturi Tarvittavat laitteet: PC Labview
Autodata-ohjelmiston käyttö FuturSoft- ohjelmien kanssa
 Autodata-ohjelmiston käyttö FuturSoft- ohjelmien kanssa Päivitetty 19.1.2006 Autodata-ohjelmiston käyttö - 1 - Sisällys YLEISTÄ... 3 AUTODATA-KUVAKKEEN KÄYTTÖ... 3 OSIEN HAKU AUTODATASTA (EI AUTODATA KOODIA)...
Autodata-ohjelmiston käyttö FuturSoft- ohjelmien kanssa Päivitetty 19.1.2006 Autodata-ohjelmiston käyttö - 1 - Sisällys YLEISTÄ... 3 AUTODATA-KUVAKKEEN KÄYTTÖ... 3 OSIEN HAKU AUTODATASTA (EI AUTODATA KOODIA)...
KÄYTTÖOHJE CELOTRON GSM LÄMPÖPUMPPUOHJAIN
 KÄYTTÖOHJE CELOTRON GSM LÄMPÖPUMPPUOHJAIN Snro: 7163630 Kiitos tuotteemme hankinnasta. Tämä älykäs gsm toiminen laite ei ainostaan ohjaa lämpöpumppua vaan se myös tarkkailee huonelämpötilaasi ja sähköverkon
KÄYTTÖOHJE CELOTRON GSM LÄMPÖPUMPPUOHJAIN Snro: 7163630 Kiitos tuotteemme hankinnasta. Tämä älykäs gsm toiminen laite ei ainostaan ohjaa lämpöpumppua vaan se myös tarkkailee huonelämpötilaasi ja sähköverkon
ITKP102 Ohjelmointi 1 (6 op)
") ITKP102 Ohjelmointi 1 (6 op) Tentaattori: Antti-Jussi Lakanen 22. huhtikuuta 2016 Vastaa kaikkiin tehtäviin. Tee jokainen tehtävä erilliselle konseptiarkille! Kirjoittamasi luokat, funktiot ja aliohjelmat
ITKP102 Ohjelmointi 1 (6 op) Tentaattori: Antti-Jussi Lakanen 22. huhtikuuta 2016 Vastaa kaikkiin tehtäviin. Tee jokainen tehtävä erilliselle konseptiarkille! Kirjoittamasi luokat, funktiot ja aliohjelmat
Tutoriaaliläsnäoloista
 Tutoriaaliläsnäoloista Tutoriaaliläsnäolokierroksella voi nyt täyttää anomuksen läsnäolon merkitsemisestä Esim. tagi ei toiminut, korvavaltimon leikkaus, yms. Hyväksyn näitä omaa harkintaa käyttäen Tarkoitus
Tutoriaaliläsnäoloista Tutoriaaliläsnäolokierroksella voi nyt täyttää anomuksen läsnäolon merkitsemisestä Esim. tagi ei toiminut, korvavaltimon leikkaus, yms. Hyväksyn näitä omaa harkintaa käyttäen Tarkoitus
MixW ja Dx-vihjeet (ohje) oh3htu 10.9.2009
 oh3htu 10.9.2009") MixW ja Dx-vihjeet (ohje) oh3htu 10.9.2009 MixW:n käyttäjille mieleen on saada DX-vihjeet MixW:n Dxcluster dialog-ikkunaan sen monipuolisuuden ansiosta. Dxcluster dialog-ikkunassa on muun muassa helposti
MixW ja Dx-vihjeet (ohje) oh3htu 10.9.2009 MixW:n käyttäjille mieleen on saada DX-vihjeet MixW:n Dxcluster dialog-ikkunaan sen monipuolisuuden ansiosta. Dxcluster dialog-ikkunassa on muun muassa helposti
Ennen varmenteen asennusta varmista seuraavat asiat:
 NAPPULA-VARMENTEEN ASENNUSOHJE 1/17 Suosittelemme käyttämään Nappulaa uusimmalla versiolla Firefox- tai Chrome- tai Applen laitteissa Safariselaimesta. Tästä dokumentista löydät varmenteen asennusohjeet
NAPPULA-VARMENTEEN ASENNUSOHJE 1/17 Suosittelemme käyttämään Nappulaa uusimmalla versiolla Firefox- tai Chrome- tai Applen laitteissa Safariselaimesta. Tästä dokumentista löydät varmenteen asennusohjeet
KODU. Lumijoen peruskoulu
 KODU Lumijoen peruskoulu Sisällysluettelo 1. Aloitus... 2 1.1 Pelin tallennuspaikka... 2 1.2 Kodu Game lab... 3 2 Maan luominen... 4 2.1. Seinän tekeminen... 5 2.2. Vesialueen tekeminen peliin... 6 2.3.
KODU Lumijoen peruskoulu Sisällysluettelo 1. Aloitus... 2 1.1 Pelin tallennuspaikka... 2 1.2 Kodu Game lab... 3 2 Maan luominen... 4 2.1. Seinän tekeminen... 5 2.2. Vesialueen tekeminen peliin... 6 2.3.
PEM1123/ 410993A. Asennus- ja käyttöohje SW/S2.5 viikkokello. ABB i-bus KNX. SW/S2.5 Viikkokello
 PEM1123/ 410993A Asennus- ja käyttöohje SW/S2.5 viikkokello ABB i-bus KNX SW/S2.5 Viikkokello Sisällysluettelo 1.0 Kuvaus 1.1 Laitteen käyttö...3 1.2 Ominaisuudet...3 1.3 Näppäimet ja osat...4 1.4 Tekniset
PEM1123/ 410993A Asennus- ja käyttöohje SW/S2.5 viikkokello ABB i-bus KNX SW/S2.5 Viikkokello Sisällysluettelo 1.0 Kuvaus 1.1 Laitteen käyttö...3 1.2 Ominaisuudet...3 1.3 Näppäimet ja osat...4 1.4 Tekniset
Altus RTS. 1 Tekniset tiedot: 2 Lähetin: Telis 1 Telis 4 Centralis RTS
 Viitteet 000071 - Fi ASENNUS ohje Altus RTS Elektronisesti ohjattu putkimoottori, jossa RTSradiovastaanotin, aurinko- & tuuliautomatiikka SOMFY Altus RTS on putkimoottori, jonka rakenteeseen kuuluvat RTS-radiovastaanotin,
Viitteet 000071 - Fi ASENNUS ohje Altus RTS Elektronisesti ohjattu putkimoottori, jossa RTSradiovastaanotin, aurinko- & tuuliautomatiikka SOMFY Altus RTS on putkimoottori, jonka rakenteeseen kuuluvat RTS-radiovastaanotin,
BL40A1810 Mikroprosessorit, harjoitus 1
 BL40A1810 Mikroprosessorit, harjoitus 1 Käytettävä laitteisto Kurssin opetuslaitteistona käytetään Legon MINDSTORMS laitteita, jonka pääosia ovat ohjelmoitava NXT-yksikkö (Atmel ARM7, 64k RAM, 256k Flash),
BL40A1810 Mikroprosessorit, harjoitus 1 Käytettävä laitteisto Kurssin opetuslaitteistona käytetään Legon MINDSTORMS laitteita, jonka pääosia ovat ohjelmoitava NXT-yksikkö (Atmel ARM7, 64k RAM, 256k Flash),
Machine Control Studio - Kuinka päästä alkuun. Ohjelmointiympäristö Unidrive M ja MCi2x0 laitteille
 Machine Control Studio - Kuinka päästä alkuun Ohjelmointiympäristö Unidrive M ja MCi2x0 laitteille Mistä aloittaa? Machine Control Studion lataaminen ja asennus. MCS käynnistys ja uuden projektin luonti.
Machine Control Studio - Kuinka päästä alkuun Ohjelmointiympäristö Unidrive M ja MCi2x0 laitteille Mistä aloittaa? Machine Control Studion lataaminen ja asennus. MCS käynnistys ja uuden projektin luonti.
Käyttöohje LogiComm ohjausjärjestelmä
 Käyttöohje LogiComm ohjausjärjestelmä P/N 797 - Finnish - Päävalikko Tässä käyttöohjeessa selostetaan yleiset tehtävät, jotka liittyvät tuotteen varmennustehtäviin ja painesäädön asettamiseen. Täydellinen
Käyttöohje LogiComm ohjausjärjestelmä P/N 797 - Finnish - Päävalikko Tässä käyttöohjeessa selostetaan yleiset tehtävät, jotka liittyvät tuotteen varmennustehtäviin ja painesäädön asettamiseen. Täydellinen
Osa 7: Hahmojen ohjelmointi ja hienosäätö
 1 Osa 7: Hahmojen ohjelmointi ja hienosäätö Tässä luvussa käymme läpi perusohjelmoinnin alkeita. - Ensimmäisenä koduhahmon ohjelmointia. 1. Program -osiossa tapahtuu itse se koodin kirjoitus, missä määrätään
1 Osa 7: Hahmojen ohjelmointi ja hienosäätö Tässä luvussa käymme läpi perusohjelmoinnin alkeita. - Ensimmäisenä koduhahmon ohjelmointia. 1. Program -osiossa tapahtuu itse se koodin kirjoitus, missä määrätään
Skype for Business ohjelman asennus- ja käyttöohje Sisällys
 Skype for Business ohjelman asennus- ja käyttöohje Sisällys Kirjautuminen Office 365 -palveluun... 2 Skype for Business ohjelman asentaminen... 3 Yhteyshenkilöiden lisääminen Skype for Business ohjelmassa...
Skype for Business ohjelman asennus- ja käyttöohje Sisällys Kirjautuminen Office 365 -palveluun... 2 Skype for Business ohjelman asentaminen... 3 Yhteyshenkilöiden lisääminen Skype for Business ohjelmassa...
Sisällysluettelo 4 ONGELMATILANTEIDEN RATKAISUT... 12
 Sisällysluettelo 1 YLEISTÄ... 2 1.1 Vastuuvapauslauseke ja takuun rajoitus... 2 1.2 Tarvittavat varusteet... 2 1.3 Etäohjattavat toiminnot... 3 2 SOVELLUKSEN ASENTAMINEN JA ALKUASETUKSET... 4 2.1 Sovelluksen
Sisällysluettelo 1 YLEISTÄ... 2 1.1 Vastuuvapauslauseke ja takuun rajoitus... 2 1.2 Tarvittavat varusteet... 2 1.3 Etäohjattavat toiminnot... 3 2 SOVELLUKSEN ASENTAMINEN JA ALKUASETUKSET... 4 2.1 Sovelluksen
Ohjelmoitava magneettivastuksellinen kuntopyörä. LCD-Näyttö BC-81295
 Ohjelmoitava magneettivastuksellinen kuntopyörä LCD-Näyttö BC-81295 Yhteenveto Tämä on tarkoitettu ainoastaan ohjelmoitavaan magneettivastukselliseen kuntopyörään. Järjestelmään kuuluu kolme (3) osaa:
Ohjelmoitava magneettivastuksellinen kuntopyörä LCD-Näyttö BC-81295 Yhteenveto Tämä on tarkoitettu ainoastaan ohjelmoitavaan magneettivastukselliseen kuntopyörään. Järjestelmään kuuluu kolme (3) osaa:
KÄYTTÖOHJE SATEL I-LINK PC POINT-TO-MULTIPOINT OHJELMISTO
 KÄYTTÖOHJE SATEL I-LINK PC POINT-TO-MULTIPOINT OHJELMISTO 1 1 OTSIKOT 1 OTSIKOT...2 2 YLEISTÄ...3 2.1 SATEL I-LINK PC...3 3 ASETUKSET...4 3.1 SATELLINE RADIOMODEEMIN JA SATEL I-LINK 100:N ASETUKSET...4
KÄYTTÖOHJE SATEL I-LINK PC POINT-TO-MULTIPOINT OHJELMISTO 1 1 OTSIKOT 1 OTSIKOT...2 2 YLEISTÄ...3 2.1 SATEL I-LINK PC...3 3 ASETUKSET...4 3.1 SATELLINE RADIOMODEEMIN JA SATEL I-LINK 100:N ASETUKSET...4
Harjoitustyö: virtuaalikone
 Harjoitustyö: virtuaalikone Toteuta alla kuvattu virtuaalikone yksinkertaiselle olio-orientoituneelle skriptauskielelle. Paketissa on testaamista varten mukana kaksi lyhyttä ohjelmaa. Ohjeita Noudata ohjelman
Harjoitustyö: virtuaalikone Toteuta alla kuvattu virtuaalikone yksinkertaiselle olio-orientoituneelle skriptauskielelle. Paketissa on testaamista varten mukana kaksi lyhyttä ohjelmaa. Ohjeita Noudata ohjelman
WCONDES OHJEET ITÄRASTEILLE (tehty Condes versiolle 8)
") WCONDES OHJEET ITÄRASTEILLE (tehty Condes versiolle 8) 1 UUDEN KILPAILUTIEDOSTON AVAUS Avaa Wcondes ohjelma tuplaklikkaamalla wcondes.lnk ikonia. Ohjelma avaa automaattisesti viimeksi tallennetun kilpailutiedoston.
WCONDES OHJEET ITÄRASTEILLE (tehty Condes versiolle 8) 1 UUDEN KILPAILUTIEDOSTON AVAUS Avaa Wcondes ohjelma tuplaklikkaamalla wcondes.lnk ikonia. Ohjelma avaa automaattisesti viimeksi tallennetun kilpailutiedoston.
JOHNSON CONTROLS. Maalämpösäädin KÄYTTÖOHJE
 JOHNSON CONTROLS Maalämpösäädin KÄYTTÖOHJE Ohjekirjassa perehdytään tarkemmin maalämpökoneen toimintaan ja asetuksiin. Noudattamalla ohjekirjan ohjeita saatte parhaimman hyödyn laitteestanne, sekä varmistatte
JOHNSON CONTROLS Maalämpösäädin KÄYTTÖOHJE Ohjekirjassa perehdytään tarkemmin maalämpökoneen toimintaan ja asetuksiin. Noudattamalla ohjekirjan ohjeita saatte parhaimman hyödyn laitteestanne, sekä varmistatte
LoCCaM. LoCCaM Cam laitteiston ohjaaminen. Dimag Ky dimag.fi
 LoCCaM LoCCaM Cam laitteiston ohjaaminen Dimag Ky janne.koski @ dimag.fi +358505907788 Laitteen lisääminen sovellukseen Sovelluksen pääsivulta valitaan oikeasta yläkulman valikosta Aloita uusi (1) Aukeavaan
LoCCaM LoCCaM Cam laitteiston ohjaaminen Dimag Ky janne.koski @ dimag.fi +358505907788 Laitteen lisääminen sovellukseen Sovelluksen pääsivulta valitaan oikeasta yläkulman valikosta Aloita uusi (1) Aukeavaan
Laboratoriotyö. 1. Laitteisto. 1.1 Kamera
 Laboratoriotyö 1. Laitteisto 1.1 Kamera Järjestelmän kamerassa (Hitachi, VK-C77E) on CCD -kenno ja mahdollisuus kuvan asynkroniseen päivitykseen. Kamerassa on sarjaliitäntä, jonka kautta voidaan ohjata
Laboratoriotyö 1. Laitteisto 1.1 Kamera Järjestelmän kamerassa (Hitachi, VK-C77E) on CCD -kenno ja mahdollisuus kuvan asynkroniseen päivitykseen. Kamerassa on sarjaliitäntä, jonka kautta voidaan ohjata
Lataussäädin 12/24V 10A. Käyttöohje
 Lataussäädin 12/24V 10A Käyttöohje 1 Yleistä Lataussäätimessä on näyttö ja sen latausmenetelmä on 3-vaiheinen PWM lataus. Siinä on myös kaksi USB liitintä pienten laitteiden lataamiseen. 2 Kytkentäkaavio
Lataussäädin 12/24V 10A Käyttöohje 1 Yleistä Lataussäätimessä on näyttö ja sen latausmenetelmä on 3-vaiheinen PWM lataus. Siinä on myös kaksi USB liitintä pienten laitteiden lataamiseen. 2 Kytkentäkaavio
ArcGIS Pro -ohjelmiston käyttöönotto. Ohje /
 ArcGIS Pro -ohjelmiston käyttöönotto Ohje / 12.7.2017 2 (14) Sisältö 1. ArcGIS Pro:n lataaminen, asennuspaketin purkaminen ja asentaminen... 3 ArcGIS Pro:n lataaminen My Esri -palvelusta... 3 Asennuspaketin
ArcGIS Pro -ohjelmiston käyttöönotto Ohje / 12.7.2017 2 (14) Sisältö 1. ArcGIS Pro:n lataaminen, asennuspaketin purkaminen ja asentaminen... 3 ArcGIS Pro:n lataaminen My Esri -palvelusta... 3 Asennuspaketin
Adafruit Circuit Playground Express
 Adafruit Circuit Playground Express Ulkoiset LEDit ja moottorit Sini Riikonen, sini.riikonen@helsinki.fi 6.6.2019 Adafruit Circuit Playground Express / Ledit ja moottorit / 2019 Innokas 1 Yleistä Circuit
Adafruit Circuit Playground Express Ulkoiset LEDit ja moottorit Sini Riikonen, sini.riikonen@helsinki.fi 6.6.2019 Adafruit Circuit Playground Express / Ledit ja moottorit / 2019 Innokas 1 Yleistä Circuit
Automaattitilausten hallinta. Automaattitilauksien uudistettu käsittely
 Automaattitilausten hallinta Raportit Saat yhteenvedon voimassa olevista automaattitilauksista ja automaatti-ilmoituksista hakemistopuun Raportit-valikon alta. PDF-napista voit ladata koneellesi yhteenvedon
Automaattitilausten hallinta Raportit Saat yhteenvedon voimassa olevista automaattitilauksista ja automaatti-ilmoituksista hakemistopuun Raportit-valikon alta. PDF-napista voit ladata koneellesi yhteenvedon
MicroStation V8i-käyttöympäristö
 MicroStation V8i-käyttöympäristö Liite 2 Pääkäyttäjän ohjeet Juha Orre Tekniikan koulutusalan opinnäytetyö Kone- ja tuotantotekniikka Insinööri (AMK) KEMI 2013 SISÄLLYS Liite 2 2(14) SISÄLLYS... 2 1 KÄYTTÖOHJEET...
MicroStation V8i-käyttöympäristö Liite 2 Pääkäyttäjän ohjeet Juha Orre Tekniikan koulutusalan opinnäytetyö Kone- ja tuotantotekniikka Insinööri (AMK) KEMI 2013 SISÄLLYS Liite 2 2(14) SISÄLLYS... 2 1 KÄYTTÖOHJEET...
OHJELMOINTILAITE 10/50
 OHJELMOINTILAITE 10/50 1 2 3 4 5 6 17 16 15 7 14 8 13 12 11 10 9 1) Näyttö 1 taivutuksen nro. 2) Näyttö 2 kulma 3) LED merkkivalo MANUAALI 4) OFF-SET. 5) Taivutussuunta. 6) Palautus 7) Käynnistys ja resetointi.
OHJELMOINTILAITE 10/50 1 2 3 4 5 6 17 16 15 7 14 8 13 12 11 10 9 1) Näyttö 1 taivutuksen nro. 2) Näyttö 2 kulma 3) LED merkkivalo MANUAALI 4) OFF-SET. 5) Taivutussuunta. 6) Palautus 7) Käynnistys ja resetointi.
GSMRELE PG-30 v 12.9.2010
 GSMRELE PG-30 v 12.9.2010 GSMRELE PG-30 on ohjaus ka hälytyslaite, joka toimii Nokia 3310 GSM-puhelimen avulla 1 Ominaisuudet Neljän releen etäohjaus, esim. termostaatin valinta mökillä. 13.9.2010 Probyte
GSMRELE PG-30 v 12.9.2010 GSMRELE PG-30 on ohjaus ka hälytyslaite, joka toimii Nokia 3310 GSM-puhelimen avulla 1 Ominaisuudet Neljän releen etäohjaus, esim. termostaatin valinta mökillä. 13.9.2010 Probyte
PIKAKÄYTTÖOHJE V S&A Matintupa
 PIKAKÄYTTÖOHJE V1.0 2007 S&A Matintupa MITTALAITE; PAINIKKEET, PORTIT, OSAT PAIKALLINEN portti (local, L) PÄÄPORTTI (master, M) LCD NÄYTTÖ PÄÄTETUNNISTIN VIRTAKYTKIN FUNKTIONÄPPÄIN Jännitteen syöttö VAHVISTUS/
PIKAKÄYTTÖOHJE V1.0 2007 S&A Matintupa MITTALAITE; PAINIKKEET, PORTIT, OSAT PAIKALLINEN portti (local, L) PÄÄPORTTI (master, M) LCD NÄYTTÖ PÄÄTETUNNISTIN VIRTAKYTKIN FUNKTIONÄPPÄIN Jännitteen syöttö VAHVISTUS/
H5P-työkalut Moodlessa
 H5P-työkalut Moodlessa 1. H5P-työkalujen käyttöönotto Moodlessa Tampereen yliopisto/tietohallinto 2017 Emma Hanhiniemi 1. Klikkaa Moodlen muokkausnäkymässä Lisää aktiviteetti tai aineisto -linkkiä. 2.
H5P-työkalut Moodlessa 1. H5P-työkalujen käyttöönotto Moodlessa Tampereen yliopisto/tietohallinto 2017 Emma Hanhiniemi 1. Klikkaa Moodlen muokkausnäkymässä Lisää aktiviteetti tai aineisto -linkkiä. 2.
TeleWell TW-LTE/4G/3G USB -modeemi Cat 4 150/50 Mbps
 TeleWell TW-LTE/4G/3G USB -modeemi Cat 4 150/50 Mbps Pikaohje Laite toimii Windows XP SP3, Windows 7,8,10 ja Mac OSx 10.5 tai käyttöjärjestelmissä, Linux tuki netistä ladattavilla ajureilla USB portin
TeleWell TW-LTE/4G/3G USB -modeemi Cat 4 150/50 Mbps Pikaohje Laite toimii Windows XP SP3, Windows 7,8,10 ja Mac OSx 10.5 tai käyttöjärjestelmissä, Linux tuki netistä ladattavilla ajureilla USB portin
Ajastin tarjoaa erilaisia toimintoja, kuten "Clock Display", "sekuntikello", "lähtölaskenta", "CountUp", "jaksoajastimen ja "Fight Gone Bad" -ajastin.
 6-DIGIT CROSSFIT TIMER Ajastin tarjoaa erilaisia toimintoja, kuten "Clock Display", "sekuntikello", "lähtölaskenta", "CountUp", "jaksoajastimen ja "Fight Gone Bad" -ajastin. Lisäksi erityiset CountUp-
6-DIGIT CROSSFIT TIMER Ajastin tarjoaa erilaisia toimintoja, kuten "Clock Display", "sekuntikello", "lähtölaskenta", "CountUp", "jaksoajastimen ja "Fight Gone Bad" -ajastin. Lisäksi erityiset CountUp-
Työ 1: Logiikka ja robotti
 AS-0.2230 Automaatio- ja systeemitekniikan laboratoriotyöt Työ 1: Logiikka ja robotti Sisältö Työn luonne... 2 Ohjelmoitava logiikka... 2 Hyllyvarasto... 3 Robotti... 4 Logiikan ohjelmointi... 5 Esiselostustehtävät...
AS-0.2230 Automaatio- ja systeemitekniikan laboratoriotyöt Työ 1: Logiikka ja robotti Sisältö Työn luonne... 2 Ohjelmoitava logiikka... 2 Hyllyvarasto... 3 Robotti... 4 Logiikan ohjelmointi... 5 Esiselostustehtävät...
PR 3100 -SARJA ASENNUS JA KYTKENTÄ
 PR 3100 SARJA ASENNUS JA KYTKENTÄ 3100V105 3114V101 FIN Yksiköitä voi syöttää 24 VDC ± 30 % jännitteellä suoraan johdottamalla tai johdottamalla maks. 130 yksikköä rinnakkain toisiinsa. 3405tehonliitäntäyksikkö
PR 3100 SARJA ASENNUS JA KYTKENTÄ 3100V105 3114V101 FIN Yksiköitä voi syöttää 24 VDC ± 30 % jännitteellä suoraan johdottamalla tai johdottamalla maks. 130 yksikköä rinnakkain toisiinsa. 3405tehonliitäntäyksikkö
HARJOITUSTYÖ: LabVIEW, Liiketunnistin
 Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: LabVIEW, Liiketunnistin Tarvittavat laitteet: PC Labview
Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: LabVIEW, Liiketunnistin Tarvittavat laitteet: PC Labview
- Käyttäjä voi valita halutun sisääntulon signaalin asetusvalikosta (esim. 0 5V, 0 10 V tai 4 20 ma)
") LE PDX DIN kiskokiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 4 numeroinen LED näyttö - Selkeä rakenne, yksinkertainen käyttää
LE PDX DIN kiskokiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 4 numeroinen LED näyttö - Selkeä rakenne, yksinkertainen käyttää
Muistimoduulit Käyttöopas
 Muistimoduulit Käyttöopas Copyright 2007 Hewlett-Packard Development Company, L.P. Tässä olevat tiedot voivat muuttua ilman ennakkoilmoitusta. Ainoat HP:n tuotteita ja palveluja koskevat takuut mainitaan
Muistimoduulit Käyttöopas Copyright 2007 Hewlett-Packard Development Company, L.P. Tässä olevat tiedot voivat muuttua ilman ennakkoilmoitusta. Ainoat HP:n tuotteita ja palveluja koskevat takuut mainitaan
Kuinka ladata tulostusprofiilit Antalis ICC Profile Centrestä
 KÄYTTÖOPAS Kuinka ladata tulostusprofiilit Antalis ICC Profile Centrestä Tämän oppaan avulla näet, kuinka helppoa on ladata materiaalien tulostusprofiilit Antalis ICC Profile Centren nettisivuilta ja siirtää
KÄYTTÖOPAS Kuinka ladata tulostusprofiilit Antalis ICC Profile Centrestä Tämän oppaan avulla näet, kuinka helppoa on ladata materiaalien tulostusprofiilit Antalis ICC Profile Centren nettisivuilta ja siirtää
Muistimoduulit Käyttöopas
 Muistimoduulit Käyttöopas Copyright 2009 Hewlett-Packard Development Company, L.P. Tässä olevat tiedot voivat muuttua ilman ennakkoilmoitusta. Ainoat HP:n tuotteita ja palveluja koskevat takuut mainitaan
Muistimoduulit Käyttöopas Copyright 2009 Hewlett-Packard Development Company, L.P. Tässä olevat tiedot voivat muuttua ilman ennakkoilmoitusta. Ainoat HP:n tuotteita ja palveluja koskevat takuut mainitaan
Videokuvan siirtäminen kamerasta tietokoneelle Windows Movie Maker -ohjelman avulla
 Videokuvan siirtäminen kamerasta tietokoneelle Windows Movie Maker -ohjelman avulla 1. Digivideokamera liitetään tietokoneeseen FireWire-piuhalla. (Liitännällä on useita eri nimiä: myös IEEE 1394, DV,
Videokuvan siirtäminen kamerasta tietokoneelle Windows Movie Maker -ohjelman avulla 1. Digivideokamera liitetään tietokoneeseen FireWire-piuhalla. (Liitännällä on useita eri nimiä: myös IEEE 1394, DV,
815338A Ohjelmointikielten periaatteet Harjoitus 2 vastaukset
 815338A Ohjelmointikielten periaatteet 2015-2016. Harjoitus 2 vastaukset Harjoituksen aiheena on BNF-merkinnän käyttö ja yhteys rekursiivisesti etenevään jäsentäjään. Tehtävä 1. Mitkä ilmaukset seuraava
815338A Ohjelmointikielten periaatteet 2015-2016. Harjoitus 2 vastaukset Harjoituksen aiheena on BNF-merkinnän käyttö ja yhteys rekursiivisesti etenevään jäsentäjään. Tehtävä 1. Mitkä ilmaukset seuraava