Kameran kuvanprosessointi
|
|
|
- Sami Kouki
- 9 vuotta sitten
- Katselukertoja:
Transkriptio
1 Kameran kuvanprosessointi T Kuvaus- ja näyttötekniikka Mikko Nuutinen, Luennon sisältö: Valotuksen ja tarkennuksen säätö Valkotasapaino, interpolointi ja värisäätö Muita kuvanprosessointiin liittyviä menetelmiä

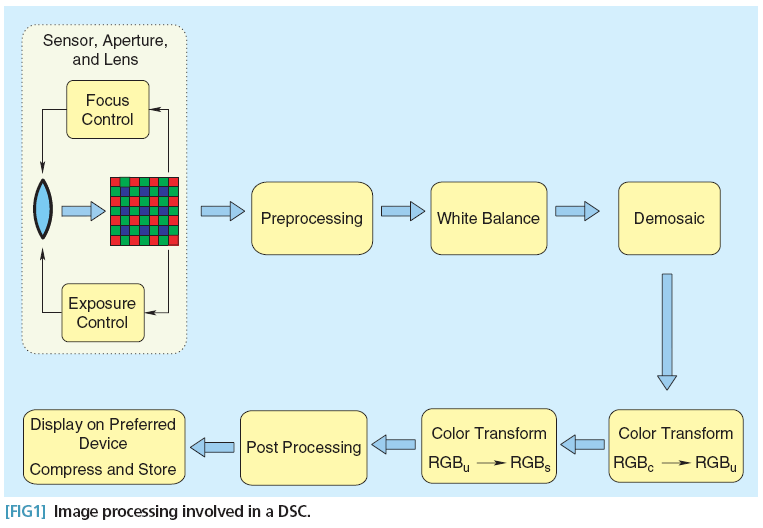
2 Tyypillisen digitaalikameran komponenttidiagrammi Kameran ohjauselektroniikka ohjaa kuvaustoimintoja, kuten valotus- sekä tarkennussäätöjä. Kameran signaalinkäsittely muuntaa kuvasensorin raakasignaalin sopivaan muotoon ulostuloa varten Digital Color Image Handbook, CRC Press 2003

3 Kuvanprosessointiketju (image processing pipe) IEEE Signal Processing Magazine 22(2005)1, pp
1, pp.")
4 Kuluttajatason digitaalikameran kuvanprosessointiketju Kuluttajakamera tuottaa standardeja kuvatiedostoja JPEG-formaatti (24 bittinen RGB-data, Exif-metadata) Metadatasta voidaan lukea esimerkiksi se, että tiedosto kuuluu esittää srgb-standardin mukaisesti Kamera Komponenttien järjestys valmistajakohtainen valinta (vertaa edellisen kalvon kaavioon) Digital Color Image Handbook, CRC Press 2003
 Digital Color Image")
5 Ammattitason (& harrastajatason) digitaalikameran kuvanprosessointiketju Ammattikameroissa (+ kehittyneemmät kuluttajakamerat) työnkulku voidaan jakaa sekä kamerassa että tietokoneella suoritettaviin osiin Kamerassa mahdollisuus renderöimättömään kuvanprosessointiin Tiedostoformaattina kameramerkkikohtainen RAW (esim. Canon.CR2 ja Nikon.NEF) Ulostulo myös haluttaessa JPEG-formaatissa Kamera Huom: Talletus yleensä valmistajan RAW-formaattiin Tietokone Digital Color Image Handbook, CRC Press 2003
 Ulostulo myös haluttaessa JPEG-formaatissa Kamera Huom: Talletus yleensä valmistajan RAW-formaattiin Tietokone Digital")
6 Esimerkki EXIF-metadatasta 1 Filename : Canon_IXUS_1000_HS_Cluster5_5600K_5200lux_200cm.jpg JFIF_APP1 : Exif JFIF_APP1 : http Main Information ImageDescription : Make : Canon Model : Canon IXUS 1000HS DateTime : 2010:11:25 13:11:11 Sub Information ExposureTime : 1/640Sec FNumber : F3.4 ISOSpeedRatings : 320 ExifVersion : 0230 DateTimeOriginal : 2010:11:25 13:11:11 DateTimeDigitized : 2010:11:25 13:11:11 CompressedBitsPerPixel : 3/1 (bit/pixel) ShutterSpeedValue : 1/636Sec ApertureValue : F3.4 ExposureBiasValue : EV0.0 MaxApertureValue : F3.4 MeteringMode : Division Flash : Not fired(auto) FocalLength : 6.30(mm) UserComment : ExifImageWidth : 3648 ExifImageHeight : 2736 ExposureMode : Auto WhiteBalance : Auto DigitalZoomRatio : 3648/3648 SceneCaptureType : Standard Vendor Original Information MacroMode : Off Self-timer : Off Quality : Fine FlashMode : Red-Eye Reducing Auto Drive Mode : Single-frame Focus Mode : Single ImageSize : Large Easy shooting mode : Full auto Digital Zoom : Off Contrast : Normal Saturation : Normal Sharpness : Normal CCD Sensitivity : AUTO MeteringMode : Evaluative FocusType : Auto AF point selected : Unknown (16390) ExposureProgram : Easy shooting Focal length of lens : (mm) Long Shutter Mode : Off White Balance : Auto Sequence number(continuous mode) : 0 Flash bias : 0 EV Image type : IMG:IXUS1000HSJPEG Firmware version : FirmwareVersion1.00 Image Number : Owner name :
 FocalLength : 6.")
7 Esimerkki EXIF-metadatasta 2 Filename : Apple_iPhone_4_Cluster6_5700K_10000lux_Landscape.jpg JFIF_APP1 : Exif Main Information Make : Apple Model : iphone 4 Software : 4.1 DateTime : 2010:11:25 12:44:48 Sub Information ExposureTime : 1/838Sec FNumber : F2.8 ExposureProgram : Program Normal ISOSpeedRatings : 80 ExifVersion : 0221 DateTimeOriginal : 2010:11:25 12:44:48 DateTimeDigitized : 2010:11:25 12:44:48 ShutterSpeedValue : 1/838Sec ApertureValue : F2.8 MeteringMode : Average Flash : Not fired(auto) FocalLength : 3.85(mm) ExifImageWidth : 2592 ExifImageHeight : 1936 ExposureMode : Auto WhiteBalance : Auto SceneCaptureType : Standard Sharpness : Hard GPS Information GPSLatitudeRef : N GPSLatitude : [DM] 60 11' 5.40" [DMS] GPSLongitudeRef : E GPSLongitude : [DM] 24 49' 47.40" [DMS] GPSAltitudeRef : Sea level GPSAltitude : 11566/421 meters GPSTimeStamp : 12:45:01 GPSImgDirectionRef : Magnetic direction GPSImgDirection :
 FocalLength : 3.")
8 Valotuksen säätö
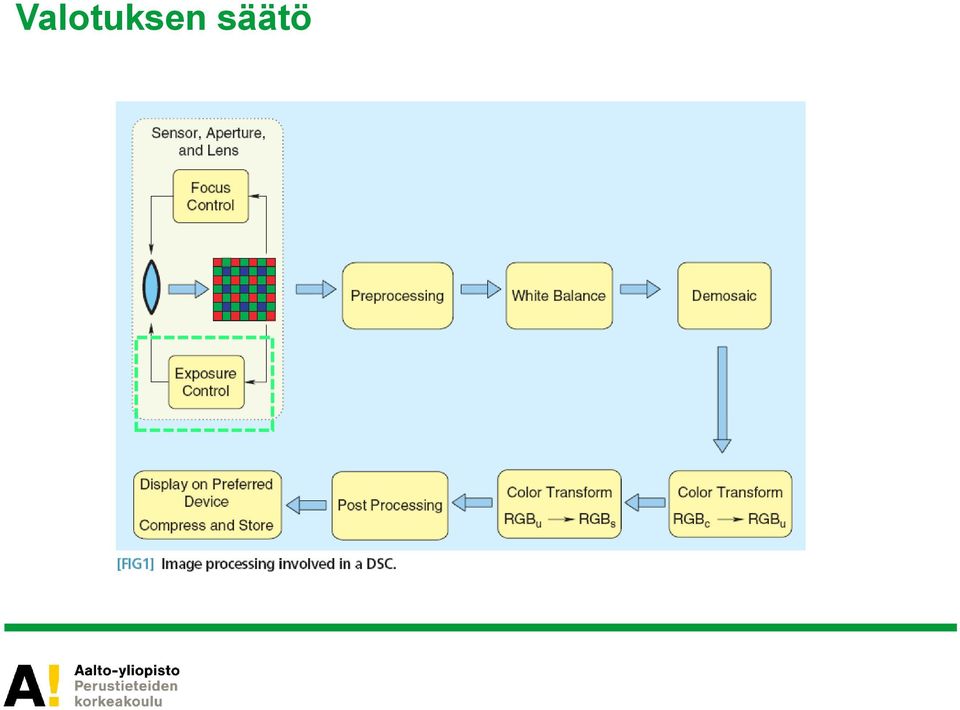
9 Valotuksen säätö Automaattinen valotus mittaa optimaalisen valotusarvon aukkokoon, valotusajan sekä vahvistuksen kombinaatiolla Kuvasensori tulee valottaa niin, että kohteen kirkkaat yksityiskohdat eivät saturoidu Lisäksi valotuksen tulee olla riittävä, jotta kohteen tummien kohtien signaalitaso on riittävä (yli kohinatason tummien alueiden yksityiskohdat detektoituvat)

10 Valotuksen säätö Signaalin vahvistus (ISO-luku) Filmikameroissa filmin ISO-nopeus määrittää filmin herkkyyttä valolle suuremman ISO-luvun filmeissä hopeahalidikiteiden pinta-ala on suurempi kuvan rakeisuus (kohinaisuus) on suurempi Digitaalikameroissa ISO-luku määrittää signaalin vahvistuskertoimen (gain) Kun ISO-luku kasvaa, vahvistetaan signaalia enemmän tuotetun kuvan rakeisuus lisääntyy, koska signaalin vahvistus vahvistaa vastaavasti myös kuvan kohinaa ISO 100 ISO 800

11 Valotuksen automaattinen säätö Valotuksensäätö mittaa kohteen valoisuuden Kohteen valoisuus (brightness) ja valotusaika; perusriippuvuus (vastaa kysymykseen millä valotussäädöillä kohde tulee kuvata jotta se valottuu oikein) B = ka 2 /(TS) ; T = ka 2 /(BS) B k A T S kohteen valoisuus vakio on linssin F-arvo aukko/polttoväli valotusaika signaalin vahvistus Usein valoisuus mitataan RGB-sensoridatasta lasketusta luminanssiarvosta. Vaihtoehtoisesti G-kanavan arvo estimoi melko tarkasti luminanssiarvoa. Jos kamerassa on tarkennussensorit, voidaan valoisuutta usein mitata niiden avulla.

12 Valotuksen automaattinen säätö Kasvatetaan aukon fyysistä kokoa, pidennetään valotusaikaa ja/tai kasvatetaan signaalin vahvistuskerrointa Kohde kuvantuu liian tummana Kohde kuvantuu sopivan kirkkaana

13 Valotuksen automaattinen säätö Kohteen valoisuuden mittaus Keskustapainotteinen mittaus: kuva-alan luminanssitasot mitataan, mutta valotus painottaa keskustaalueen luminanssitasoja soveltuu esim. henkilökuvaukseen Pistemittaus valoisuus mitataan manuaalisesti kuvaalalle asetetun pisteen perusteella

 valotusmäärän valinta perustuu valmistajakohtaisten algoritmien käyttöön, jotka vertaavat blokkien luminanssitasojen jakaumaa")
 Uudempi lähestymistapa on kasvojentunnistus ja kasvojen")
14 Valotuksen automaattinen säätö Matriisimittaus: monimutkaisempi ja enemmän laskentaa vaativa menetelmä kuva jaetaan blokkeihin, joiden keskimääräinen luminanssi mitataan (kuva a) valotusmäärän valinta perustuu valmistajakohtaisten algoritmien käyttöön, jotka vertaavat blokkien luminanssitasojen jakaumaa tyypillisten näkymien jakaumiin esim. luminanssitasojen avulla voidaan määrittää onko kohde valaistu etu- vai takapuolelta (kuva b) Uudempi lähestymistapa on kasvojentunnistus ja kasvojen perusteella toteutettu valotuksen mittaus (tai tarkennus tai värikorjaus) B IEEE Signal Processing Magazine 22(2005)1, pp
 Uudempi lähestymistapa on kasvojentunnistus ja kasvojen")
15 Tarkennuksen säätö
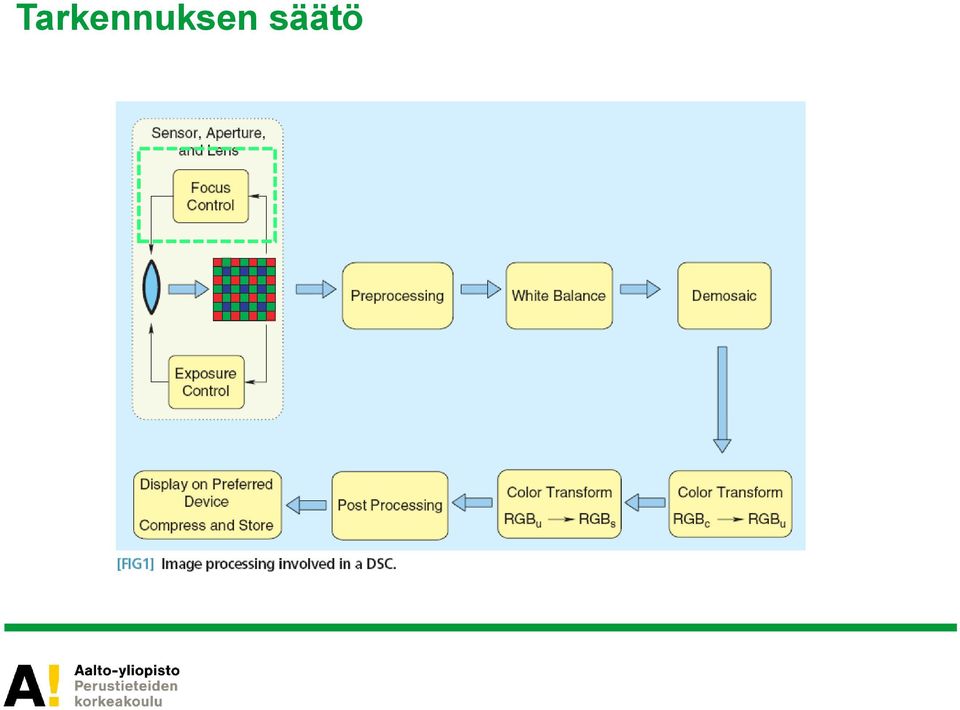

16 Tarkennuksen säätö Perusajatus: säädetään linssisysteemin paikka siten, että kohde tarkentuu kuvatasolle Automaattinen tarkennuksensäätö; aktiivinen ja passiivinen toteutus

17 Tarkennuksen automaattinen säätö Aktiivinen toteutus Infrapunavaloon perustuva automaattitarkennus Kamera lähettää infrapunasäteen ja detektoi heijastuneen säteen Säteen paluukulmasta tai säteen paluuseen kuluvasta ajasta lasketaan kohteen etäisyys Kun kohteen etäisyys tunnetaan, voidaan säätää linssien paikat Ultraääneen perustuva automaattitarkennus Kamera lähettää yhtä tai useampaa ultraäänitaajuutta samanaikaisesti objektiivi tarkentaa kohti äärettömyyttä Kun ultraääntä heijastuu takaisin kameraan, objektiivi on tarkennettu kohteeseen

18 Tarkennuksen automaattinen säätö Passiivinen toteutus (taajuus) Spatiaalisia taajuuksia mittaava menetelmä Menetelmä olettaa, että tarkka kuva sisältää enemmän korkeita taajuuksia kuin epätarkka Linssisysteemin sijainnin funktiona mitataan kuvasignaalista esim. gradienttiarvoja Gradientti mitataan vain tarkennusalueista (vertaa valotuksen mittaukseen) CMOS-sensorista voidaan mitata vain osa pikseleistä, mikä tekee sen säädöstä nopean IEEE Signal Processing Magazine 22(2005)1, pp
 CMOS-sensorista voidaan mitata")
 Vaihe-ero mitataan tarkennussensoreilla tarkennussensoreita on vähintään kaksi jokaista tarkennuspistettä kohden Kuvan ollessa tarkka, linssin eri puolilta tulevat")
19 Tarkennuksen automaattinen säätö Passiivinen toteutus (vaihe) Vaihe-eroa mittaava menetelmä Vaihe-eroa mittaava menetelmä määrittää linssien sijainnin, jossa linssin eri puolilta tulevat valonsäteet yhdistyvät (kuva a ja b) Vaihe-ero mitataan tarkennussensoreilla tarkennussensoreita on vähintään kaksi jokaista tarkennuspistettä kohden Kuvan ollessa tarkka, linssin eri puolilta tulevat valonsäteet osuvat samalle sijainnille tarkennussensoriparilla Sijaintierosta voidaan suoraan laskea tarkennusetäisyys -> linssisysteemiä tarvitsee säätää vain yhden kerran jotta kohde tarkentuu sensorille IEEE Signal Processing Magazine 22(2005)1, pp

20 Tarkennuksen automaattinen säätö Puoliläpäisevä peili päästää osan valosta, joka johdetaan peilien ja linssien avulla tarkennussensoreille 9 ristikkäistyyppistä tarkennuspistettä. Lisäksi keskipisteelle on asetettu herkkyys 45 asteen kulmiin.

21 Raakadatan esikäsittely
22 Raakadatan esikäsittely Sensorin raakasignaalia esikäsitellään ennen muita operaatioita 1. Viallisten pikselien korjaus; jotkut pikselit eivät toimi (oikeiden arvojen estimointi) 2. Signaalin linearisointi (yleensä sensorin vaste on kuitenkin lineaarista) 3. Mustan tason säätö Pimeänvirran (dark current) kompensointi; joko sensori sisältää valolta suojattuja mittapisteitä, tuotetaan pimeä kuva tai vähennetään vakiointensiteetti Hajavalon (flare) kompensointi; tuleva valo heijastelee optiikassa; kompensoidaan esim. vähentämällä tietystä pikselistä naapuripikselien keskimääräisen intensiteetin tietty osa tai vähennetään vakiointensiteetti 4. Kohinasuodatus: kamerassa useita kohinalähteitä, joiden vaikutusta suodatetaan ennen muita kuvanprosessointioperaatioita Mielellään adaptiivinen menetelmä, koska kuvan yksityiskohdat suodattuvat helposti
23 Valkotasapainonsäätö
24 Valkotasapainonsäätö Kanavakohtainen vahvistus niin, että valkoinen esine kuvausympäristössä havaitaan näytöllä tai tulosteessa valkoisena katseluympäristössä Perusteena ihmissilmän adaptoituminen ympäristön valoon eli valkoinen pinta koetaan valkoisena, vaikka ympäristön valaistus olisi esim. punertava hehkulamppu Sensoritekniikka ei adaptoidu vastaavalla tavalla Ihmissilmän adaptaatio joskus epätäydellinen, jota mallinnetaan myös kameroissa esim. Canon jättää hehkulampun valaistuksessa tuotetut kuvat hieman lämpimiksi Useimmat kamerat jättävät kynttilän- tai takanvalossa tuotetut kuvat lämpimiksi
25 Valkotasapainonsäätö Auringonvalo Käsittelemätön kuva Valkotasapainotettu kuva
26 Valkotasapainonsäätö Manuaalinen säätö: 1. neutraalin pinnan osoitus kameralle 2. värilämpötilan / oletetun valaistuksen asetus hehkulamppu K (punertava) auringonlaskuhämärä K fluoresenssilamput K salama K auringonvalo K pilvinen taivas K varjo tai erittäin pilvinen taivas K (sinertävä)
27 Valkotasapainonsäätö Kuluttajakameroissa vaatimuksena automaattinen säätö Kaksivaiheinen prosessi: 1. näkymän värilämpötilan mittaus; 2. pikseliarvojen säätö Maximum RGB oletuksena, että kuvassa oleva valkoinen alue tuottaa maksimi-intensiteetin valkotasapainotettu kuva saadaan kertoimilla R/Rmax, G/Gmax ja B/Bmax Virheellinen säätö, jos kuvassa ei ole valkoista aluetta Gray world oletuksena, että kuvan värien keskimääräinen sävy on keskiharmaa ( gray world ) valkotasapainotettu kuva saadaan kertoimilla krr, G ja kbb, kun kr = Gmean / Rmean ja kb = Gmean / Bmean Virheellinen säätö, jos kuva muodostuu suurelta osin tietystä väristä
28 Valkotasapainonsäätö gray world menetelmä määrittää valkotasapainon väärin, jos kuva-ala muodostuu suurelta osin tietystä väristä Matherson, K., Wueller, D. The Image Pipeline and How It Influences Quality Measurements Based on Existing ISO Standards, Kurssimateriaali, IS&T/SPIE 19th Annual Symposium, , San Jose, Kalifornia.
29 Valkotasapainonsäätö Toteutusesimerkkejä jatkuu.. Kuva jaetaan blokkeihin ja blokkien keskiarvoisista RGB-arvoista lasketaan blokkikohtaiset värierot (R-Y ja B-Y). Värieroarvot sijoitetaan värieroavaruuteen. Värieroarvojen sijoittumisen perusteella määritetään ympäristön valaistus IEEE Trans. Consumer Electronics 41(1995)3
30 Puuttuvien väriarvojen interpolointi (demosaic)

31 Puuttuvien väriarvojen interpolointi (demosaic) Pikselin puuttuvat väriarvot estimoidaan perustuen naapuripikseli-informaatioon Laskennallisesti usein intensiivisin osa kuvanprosessointiketjussa Yleisesti algoritmit ovat kameravalmistajien liikesalaisuuksia Hyvä algoritmi tuottaa terävän kuvan, ilman vääristymiä, eikä kasvata signaalikohinaa Matherson, K., Wueller, D. The Image Pipeline and How It Influences Quality Measurements Based on Existing ISO Standards, Kurssimateriaali, IS&T/SPIE 19th Annual Symposium, , San Jose, Kalifornia.
32 Puuttuvien väriarvojen interpolointi (demosaic) Keskiarvoistus tai bilineaarinen tekniikka ehkä yksinkertaisin menetelmä Alentaa kuvan terävyyttä sekä tuottaa reuna-alueille värivirheitä PICS 2001 pp
33 Puuttuvien väriarvojen interpolointi (demosaic) Reunan tunnistava keskiarvostus: puuttuva vihreän pikselin arvo luokitellaan kolmeen ryhmään: tasainen alue, vertikaalinen reuna, horisontaalinen reuna perustuen luokitteluun puuttuva vihreä pikseliarvo lasketaan joko neljän naapuripikselin keskiarvona tai kahden vertikaali- tai horisontaalissuuntaisten pikselien keskiarvona punainen ja sininen pikseliarvo lasketaan normaalilla keskiarvoistuksella Digital Color Image Handbook, CRC Press 2003
34 Puuttuvien väriarvojen interpolointi (demosaic) Bilineaarinen tekniikka Reunan tunnistava keskiarvostus Matherson, K., Wueller, D. The Image Pipeline and How It Influences Quality Measurements Based on Existing ISO Standards, Kurssimateriaali, IS&T/SPIE 19th Annual Symposium, , San Jose, Kalifornia.
35 Puuttuvien väriarvojen interpolointi (demosaic) Bilineaarinen tekniikka Reunan tunnistava keskiarvostus Matherson, K., Wueller, D. The Image Pipeline and How It Influences Quality Measurements Based on Existing ISO Standards, Kurssimateriaali, IS&T/SPIE 19th Annual Symposium, , San Jose, Kalifornia.
36 Väri- ja sävymuunnokset
37 RGB-kuvasignaalin muunnosprosessi Sensorin raaka-data on sensorikohtainen esitys kohteesta, eikä sillä ole suoraa visuaalista arvoa esityksen kannalta Raaka-data tulee muuntaa sopivaksi tulostukseen tai näytölle: 1. laitekohtainen muunnos: sensoriavaruus laitteistoriippumaton avaruus (esim. RGBc CIEXYZ) 2. sävy-/värimuunnokset laitteistoriippumattomassa avaruudessa 3. Laitteistoriippumaton avaruus esityslaitteen avaruus (esim. CIEXYZ srgb) Digital Color Image Handbook, CRC Press 2003
38 RGB-kuvasignaalin muunnosprosessi Sensoriavaruus sensorin kaappaama spatiaalinen intensiteettijakauma sensori- ja kuvausympäristöriippuvainen kameramallikohtainen (mahdollisesti kamerakohtainen) Laitteistoriippumaton avaruus tarkoituksena esittää signaali avaruudessa, joka säilyttää kaiken sensorille taltioituneen informaation käyttäen kolorimetrisia väriarvoja muunnos: (pikselien interpolaatio) valkopisteen valinta sovitus laitteistoriippumattomaan avaruuteen (esim. CIEXYZ) Mikä on renderöimätön avaruus? kun kuva esitetään renderöimättömässä avaruudessa, voidaan sitä tulevaisuudessa prosessoida halutulla tavalla (esim. kameroiden RAW-formaatti sekä CIEXYZ), eli informaatiota ei ole vielä hävinnyt Renderöimätön vs. kolorimetrinen avaruus? Molemmissa kaikki data tallella, mutta kolorimetrisessa avaruudessa intensiteettiarvoille on standardoitu yhteys fysikaalisiin väriarvoihin
39 Sensoriavaruus laitteistoriippumaton avaruus Lineaarinen muunnos sensoriavaruudesta (RGB) laitteistoriippumattomaan avaruuteen (CIEXYZ) Lineaarinen muunnos on approksimaatio ja sisältää aina virhettä Virhe yritetään levittää vähemmän kriittisille väreille Lineaarinen muunnos M1 voidaan laskea kameralle, kun tunnetaan N värinäytteen arvot, minimoimalla muuttuja J1 (kyseessä sensorin kalibrointi), F^-1 liittyy raakadatan linearisointiin Lineaarinen muunnos M2, joka varmistaa lisärajoitteella valkopisteen (tw) oikean toiston lasketaan minimoimalla muuttuja J2 Vaikka J2 on usein suurempi kuin J1, takaa muunnos M2 varmuudella haluttujen väriarvojen oikeellisen toiston J X Y Z 1 i N 1 M 3x3 M F 1 1 R G B c c c c i t i 2 J 2 i N 1 M 2 F 1 c i t i 2 M 2 F 1 c w t w 2
40 Sävy-/värimuunnokset / värirenderöinti Sävy-/värimuunnokset: kuvan esitysympäristön luminanssi yleensä matalampi kuin kuvausympäristön kuvan kokonaiskontrastia kasvatetaan kuvan käyttäjät muistavat yleensä tietyt värit puhtaampina kuin ne todellisuudessa olivat kuvaushetkellä tiettyjä väriarvoja tulee muuntaa (yleensä saturaatiota hieman nostetaan) Kuvausympäristön dynaaminen alue on yleensä suuri joitakin kuvan yksityiskohtia kirkkaassa sekä tummassa päässä tulee pakata Tavoitteena muuntaa kuva mahdollisimman miellyttäväksi kuvan käyttäjän näkökulmasta, vaikka lopputulos ei aina vastaa todellisuutta
41 Gamma-korjaus Tyypillisesti näytöt on kalibroitu standardigammaan, esimerkiksi noudattamaan Rec709 tai SMPTE240M standardeja Kun kuvanprosessointi säädetään samaan gammaan, niin näytölle saadaan haluttu toisto IEEE world academy of Science, Engineering and Technology 59, 2009
42 Sävy-/värimuunnossäätö Esimerkki sävytoiston modifioinnista Matherson, K., Wueller, D. The Image Pipeline and How It Influences Quality Measurements Based on Existing ISO Standards, Kurssimateriaali, IS&T/SPIE 19th Annual Symposium, , San Jose, Kalifornia.
43 Renderöimätön avaruus renderöity avaruus Renderöity avaruus ero renderöimättömään avaruuteen on usein rajoittunut gamut signaali-informaatiota tiivistetään sopimaan avaruuden dynaamiseen alueeseen (12-16 bittiä 8 bittiin) ja gamuttiin käänteinen muunnos ei yleensä mahdollinen Yleisiä renderöityjä väriavaruuksia ovat srgb ja adobe RGB muunnos vielä mahdollisesti johonkin laitekohtaiseen avaruuteen, kuten CMYK (eli tulostimien väriavaruuteen) IS&T/SID 5th Color Imaging Conf. pp
44 srgb-standardi srgb-avaruus on yleinen multimedialaitteiden standardi Standardi määrittää muunnoksen XYZavaruudesta srgb-avaruuteen Lisäksi standardi määrittää katseluolosuhteet sekä näytön ominaisuuksia srgb-standardin mukainen toisto ei perustu yksittäiseen gamma-arvoon (kuten useat muut RGB-avaruudet), vaan gammaarvo saa kokonaisuudessaan approksimaation 2,2 Toisto sisältää lineaarisen osuuden (gamma-arvo = 1) sekä epälineaariset osuudet joissa gamma-arvo on 2,4 sekä ja Csrgb on Rsrgb, Gsrgb tai Bsrgb välillä 1,0-2,3 Parametri Arvo kromaattisuus R G B W x y z R G B C linear linear linear srgb kun a C (1 a) C 0.055, C linear 1/ 2.4 linear linear Näytön luminanssi Näytön valkopiste Taustan heijastus Ympäristön valaistusvoimakkuus Ympäristön valaistuksen valkopiste, a, on R C C linear linear linear, G linear tai B * X Y Z linear 80 cd/m^2 x=0.3127, y= (D65) 20% (~keskiharmaa) 64 lux x=0.3457, y= (D50)
45 Datan jälkikäsittelyä
46 Datan jälkikäsittelyä Kuvanprosessoinnin eri vaiheet saattavat tuottaa näkyviä vääristymiä kuviin Vääristymiä korjataan erilaisilla jälkikäsittelyoperaatioilla Interpolointi saattaa aiheuttaa zipper vääristymää erityisesti kuvassa esiintyvien reunojen alueilla Yleensä kuluttajat suosivat teräviä reunoja kuvissa, joten kuvadatalle toteutetaan yleensä terävöitystä erityisesti vertikaaliseen ja horisontaaliseen suuntaan Lisäksi kuvasta pyritään poistamaan kohinaa
47 Kuvanprosessointiketju kuvina esitettynä Raakakuva Linearisointi, pimeänvirran poisto, valkotasapainonsäätö Interpolointi Kuvat jotka on esitetty renderöimättömissä avaruuksissa on skaalattu esitystarkoituksessa välille 0-1 Muunnos ISO RGB -avaruuteen Muunnos srgb avaruuteen ja 3x3- mediaanisuodatus (kohinanpoisto) IEEE Signal Processing Magazine 22(2005)1, pp
48 Kuvanprosessointiketjun suunnittelijan kompromisseja 1. Implementaatio näkökulma kuvanottoviiveet, tehonkulutus, tarkennusnopeus vs. -tarkkuus, prosessointikomponenttien järjestys 2. Väritieteen ja signaaliprosessoinnin näkökulma alipäästösuotimen ja värisuodinmatriisien herkkyyksien sekä värisuodinmatriisin mallin valinta sekä näistä seuraavan interpolointitekniikan valinta automaattisen tarkennuksen, valotuksen ja valkotasapainoalgoritmien valinta sekä prosessointiavaruuksien valinta Lähde: IEEE Signal Processing Magazine 22(2005)1, pp. 42

 ja yaw- (kallistus) suuntien kiertymistä, koska niillä on suurin")
49 Muita kuvanprosessointiin / optiikkaan liittyviä menetelmiä Kuvanvakain Motivaatio syntyy tarpeesta käyttää pidempiä valotusaikoja jolloin kuva tärähtää helposti (hämärä ympäristö, pienet pikselit..) Kamera voi liikkua sivu-, pysty- tai syvyyssuunnassa sekä kiertyä kolmen akselin ympäri (jalusta eliminoi liikkeen) Käytännössä kuvanvakain kompensoi vain pitch- (nousu) ja yaw- (kallistus) suuntien kiertymistä, koska niillä on suurin vaikutus kuvauskulmaan + pitch yaw - + Kuvat:
50 Muita kuvanprosessointiin / optiikkaan liittyviä menetelmiä Optinen kuvanvakain Optinen kuvanvakain mittaa objektiivin liikettä ylos/alas (pitch) sekä vasemmalle/oikealle (yaw) ja pyrkii kompensoimaan liikkeen vaikutusta kuvaan Mittaus tehdään kahdella gyroskoopilla, joista toinen mittaa pysty- ja toinen vaakasuuntaista kiertoa Kuluttajakameroissa gyroskooppi voi perustua pieneen hiukkaseen, jonka liikerata muuttuu rotaation vaikutuksesta (Coriolisvoima) Coriolis-voima kohdistaa hiukkaseen kiihtyvyyden, joka mitataan ja mitta-arvo toimii liikettä kompensoivien komponenttien ohjaussignaalina Kompensointiin sekä optinen tekniikka (siirrettään linssiryhmää) että mekaaninen tekniikka (siirretään sensoria) Optinen tekniikka (Canon ja Nikon käyttää) Mekaaninen tekniikka (Sony, Pentax ja Olympus käyttää)
51 Muita kuvanprosessointiin / optiikkaan liittyviä menetelmiä Elektroninen kuvanvakain Elektroninen/digitaalinen kuvanvakain perustuu algoritmeihin, jotka prosessoi kuvasignaalia niin, että tärinän aiheuttama liike kompensoituu ulostulokuvasta Huomaa ero: optinen vakain ohjaa valonsädettä, kun taas elektroninen vakain siirtää jo detektoidun signaalin paikkasijaintia Käyttö enemmän videokameroissa Käytännössä sensorin kuva-alasta käytetään vain osa ja keskipistettä siirretään perustuen laskettuun liikkeeseen Toteutus reaaliaikaisena kamerassa perustuen gyroskoopin mittadataan tai jälkikäsittelyoperaationa (digitaalisella filtterillä) videolle Käden tärinä aiheuttaa että videon yksittäinen kuva tallettaa liikkuvaan kohteeseen tärinää Digitaalinen kuvanvakain kroppaa joka kuvasta vain tietyn alueen jolloin liike tallettuu suorempana
52 Muita kuvanprosessointiin / optiikkaan liittyviä menetelmiä Elektroninen kuvanvakain Jälkikäsittelyyn perustuva digitaalinen kuvanvakain (stabilisointifiltteri) laskee videon kuvien välille esimerkiksi vastinpisteitä, joiden perusteella lasketaan liikevektorit ja estimoidaan videon tärinä Stabilisoitu video muodostetaan kropatuista kuvista Alkuperäiset kuvat Estimoidun tärinän perusteella kropatut kuvat Stabiloidut kuvat DEMO: Kuvien lähde:
53 Muita kuvanprosessointiin liittyviä menetelmiä Kasvojen tunnistus Kuluttajakameroiden kuvista 70 % sisältää kasvoja Kasvojen tunnistusalgoritmi etsii näkymästä kasvot ja säätää kuvan tarkennuksen ja valotuksen kasvoalueen perusteella Eräs uusi ominaisuus on kasvojen identifiointi, joka voidaan opettaa tunnistamaan henkilöt kuvassa
 Esimerkiksi Lai ja Li esitti menetelmän, joka perustuu ihoalueiden segmentointiin ja naama-alueen verifiointiin Opetettu piirre on")

54 Muita kuvanprosessointiin liittyviä menetelmiä Kasvojen tunnistus Kasvojen tunnistusalgoritmit pohjautuu opetettuihin piirteisiin (väri ja muoto) Esimerkiksi Lai ja Li esitti menetelmän, joka perustuu ihoalueiden segmentointiin ja naama-alueen verifiointiin Opetettu piirre on ihonväri-jakauma, joka on sovitettu gaussiseen malliin. Malli antaa pikselikohtaisen todennäköisyysarvon Todennäköisyyskuva binarisoidaan perustuen kynnysarvoon T Naama-alueen verifiointi perustuu naaman piirteiden mittasuhteisiin IEEE proc. of int. conf. on video and signal based surveillance 2006


55 Muita kuvanprosessointiin liittyviä menetelmiä Punasilmäisyyden poisto Punasilmäisyys on tyypillinen artifakti kameroissa joissa salama on sijoitettu lähelle optiikkaa Punasilmäisyys johtuu siitä että salaman valo heijastuu retinasta sensorille Eräs tapa vähentää punasilmäisyyttä on kasvattaa salaman etäisyyttä objektiivista, toinen tapa on käyttää vilkkuvaa esisalamaa joka pienentää pupillia Usein nykyaikaiset kompaktikamerat sisältää digitaalisen punasilmäisyyden poiston IS&T PICS 2001


56 Muita kuvanprosessointiin liittyviä menetelmiä Punasilmäisyyden poisto Digitaalista punasilmäisyyden poistoa vaikeuttaa että silmien muoto ja väri vaihtelee Suoraviivainen tapa on tunnistaa silmäalue, identifioida väri joka on todennäköisesti punasilmäisyyttä, binarisoida kuva perustuen väriin, sumentaa alueen reunat ja korjata punasilmäisyys IS&T PICS 2001
Digitaalikameran optiikka ja värinmuodostus
 Digitaalikameran optiikka ja värinmuodostus T-75.5100 Kuvaus- ja näyttötekniikka Mikko Nuutinen, 14.9.2012 Luennon sisältö: Optiikka: polttoväli, valovoima, linssivirheet Värillisyys: värisuodinmatriisi,
Digitaalikameran optiikka ja värinmuodostus T-75.5100 Kuvaus- ja näyttötekniikka Mikko Nuutinen, 14.9.2012 Luennon sisältö: Optiikka: polttoväli, valovoima, linssivirheet Värillisyys: värisuodinmatriisi,
Kuvanlaadunparantaminen. Mikko Nuutinen 21.3.2013
 Kuvanlaadunparantaminen Mikko Nuutinen 21.3.2013 Luennon sisältö Termistöä Kuvanentisöinti Terävyys unsharp masking Kohina non-local means Linssivääristymän korjaus Kuvanlaadunehostaminen Kontrasti Auto-levels
Kuvanlaadunparantaminen Mikko Nuutinen 21.3.2013 Luennon sisältö Termistöä Kuvanentisöinti Terävyys unsharp masking Kohina non-local means Linssivääristymän korjaus Kuvanlaadunehostaminen Kontrasti Auto-levels
Värinhallinta ja -mittalaitteet. Mikko Nuutinen 7.2.2012
 Värinhallinta ja -mittalaitteet Mikko Nuutinen 7.2.2012 Luennon oppimistavoitteet Värinhallinta Käsitteet lähde- ja kohdelaitteen profiili sekä yhdysavaruus Näköistystavat (rendering intent) Värinmittalaitteet
Värinhallinta ja -mittalaitteet Mikko Nuutinen 7.2.2012 Luennon oppimistavoitteet Värinhallinta Käsitteet lähde- ja kohdelaitteen profiili sekä yhdysavaruus Näköistystavat (rendering intent) Värinmittalaitteet
Uudet ominaisuudet. Versio 3.00
 Uudet ominaisuudet Versio 3.00 Tämän tuotteen mukana toimitetun asiakirjan sisältämät kuvaukset eivät enää välttämättä vastaa laiteohjelmistopäivitysten seurauksena lisättyjä tai muutettuja ominaisuuksia.
Uudet ominaisuudet Versio 3.00 Tämän tuotteen mukana toimitetun asiakirjan sisältämät kuvaukset eivät enää välttämättä vastaa laiteohjelmistopäivitysten seurauksena lisättyjä tai muutettuja ominaisuuksia.
TEKSTI // POUL SIERSBÆK. Opi käyttämään AUKON ESIVALINTAA. ƒ2.8. ƒ1.4 ƒ2. ƒ4 ƒ5.6 ƒ8 ƒ11 ƒ16 ƒ22 ƒ32. Digikuva 2015
 TEKSTI // POUL SIERSBÆK Opi käyttämään AUKON ESIVALINTAA ƒ2.8 ƒ1 ƒ1.4 ƒ2 ƒ4 ƒ5.6 ƒ8 ƒ11 ƒ16 ƒ22 ƒ32 36 LUE uudistunut Digikuva Kuvassa käytettiin suurta aukkoa. Näin tausta pehmeni kauniisti ja valokohdat
TEKSTI // POUL SIERSBÆK Opi käyttämään AUKON ESIVALINTAA ƒ2.8 ƒ1 ƒ1.4 ƒ2 ƒ4 ƒ5.6 ƒ8 ƒ11 ƒ16 ƒ22 ƒ32 36 LUE uudistunut Digikuva Kuvassa käytettiin suurta aukkoa. Näin tausta pehmeni kauniisti ja valokohdat
NIKON COOLPIX S3000 NIKON DSLR D3100 AP-SYSTEMS - KAMERATARJOUKSET. Tarjoushinta 139,- Nikon 3100 + Tamron 18-200 mm pakettihintaan 599,-
 Sivu 1 NIKON COOLPIX S3000 139,- 5640000172 NIKON COOLPIX S3000 SORT VMA541E1 EAN: 018208918966 139 NIKON DSLR D3100 Nikon 3100 + Tamron 18-200 mm pakettihintaan 599,- Sivu 2 PENTAX OPTIO S1 139,50 PENTAX
Sivu 1 NIKON COOLPIX S3000 139,- 5640000172 NIKON COOLPIX S3000 SORT VMA541E1 EAN: 018208918966 139 NIKON DSLR D3100 Nikon 3100 + Tamron 18-200 mm pakettihintaan 599,- Sivu 2 PENTAX OPTIO S1 139,50 PENTAX
Digitaalinen signaalinkäsittely Kuvankäsittely
 Digitaalinen signaalinkäsittely Kuvankäsittely Teemu Saarelainen, teemu.saarelainen@kyamk.fi Lähteet: Ifeachor, Jervis, Digital Signal Processing: A Practical Approach H.Huttunen, Signaalinkäsittelyn menetelmät,
Digitaalinen signaalinkäsittely Kuvankäsittely Teemu Saarelainen, teemu.saarelainen@kyamk.fi Lähteet: Ifeachor, Jervis, Digital Signal Processing: A Practical Approach H.Huttunen, Signaalinkäsittelyn menetelmät,
CCD-kamerat ja kuvankäsittely
 CCD-kamerat ja kuvankäsittely Kari Nilsson Finnish Centre for Astronomy with ESO (FINCA) Turun Yliopisto 6.10.2011 Kari Nilsson (FINCA) CCD-havainnot 6.10.2011 1 / 23 Sisältö 1 CCD-kamera CCD-kameran toimintaperiaate
CCD-kamerat ja kuvankäsittely Kari Nilsson Finnish Centre for Astronomy with ESO (FINCA) Turun Yliopisto 6.10.2011 Kari Nilsson (FINCA) CCD-havainnot 6.10.2011 1 / 23 Sisältö 1 CCD-kamera CCD-kameran toimintaperiaate
NEX-3/5/5C/C3 NEX-VG10/VG10E
 NEX-3/5/5C/C3 NEX-VG10/VG10E Tämän laiteohjelmapäivityksen uudet toiminnot ja niiden käyttö on kuvattu jäljempänä. Jos haluat lisätietoja, katso kameran/videokameran ja LA-EA2- kiinnityssovittimen mukana
NEX-3/5/5C/C3 NEX-VG10/VG10E Tämän laiteohjelmapäivityksen uudet toiminnot ja niiden käyttö on kuvattu jäljempänä. Jos haluat lisätietoja, katso kameran/videokameran ja LA-EA2- kiinnityssovittimen mukana
Tämän värilaatuoppaan tarkoitus on selittää, miten tulostimen toimintoja voidaan käyttää väritulosteiden säätämiseen ja mukauttamiseen.
 Sivu 1/7 Värilaatuopas Tämän värilaatuoppaan tarkoitus on selittää, miten tulostimen toimintoja voidaan käyttää väritulosteiden säätämiseen ja mukauttamiseen. Laatu-valikko Tulostustila Väri Vain musta
Sivu 1/7 Värilaatuopas Tämän värilaatuoppaan tarkoitus on selittää, miten tulostimen toimintoja voidaan käyttää väritulosteiden säätämiseen ja mukauttamiseen. Laatu-valikko Tulostustila Väri Vain musta
KUVAMUOKKAUS HARJOITUS
 KUVAMUOKKAUS HARJOITUS PUNASILMÄISYYS, VÄRI, KUVAKOKO, RAJAUS PUNASILMÄISYYS Kuvien punasilmäisyyden joutuu kohtaamaan usein huolimatta kameroiden hyvistä ominaisuuksista. Ohjelma tarjoaa hyvän työvälineen
KUVAMUOKKAUS HARJOITUS PUNASILMÄISYYS, VÄRI, KUVAKOKO, RAJAUS PUNASILMÄISYYS Kuvien punasilmäisyyden joutuu kohtaamaan usein huolimatta kameroiden hyvistä ominaisuuksista. Ohjelma tarjoaa hyvän työvälineen
Valon määrä ratkaisee Aukko
 Valon määrä ratkaisee Aukko syväterävyys Suljinaika ISO liike ja terävyys valoherkkyys ja kohina Valon määrä ratkaisee / ajan esivalinta Bulb käytössä M-tilassa, valottaa niin kauan kuin painetaan laukaisinta
Valon määrä ratkaisee Aukko syväterävyys Suljinaika ISO liike ja terävyys valoherkkyys ja kohina Valon määrä ratkaisee / ajan esivalinta Bulb käytössä M-tilassa, valottaa niin kauan kuin painetaan laukaisinta
Valaisukurssi. TT-Kamerat, kevät 2010 Jari Huilla. Lisenssi: Creative Commons Nimeä-Epäkaupallinen-Tarttuva 1.0 Suomi
 Valaisukurssi TT-Kamerat, kevät 2010 Jari Huilla Lisenssi: Creative Commons Nimeä-Epäkaupallinen-Tarttuva 1.0 Suomi Aikataulusta 12.4.: Salamavalaisun perusasiat ja yhden salaman käyttö potrettivalaisussa
Valaisukurssi TT-Kamerat, kevät 2010 Jari Huilla Lisenssi: Creative Commons Nimeä-Epäkaupallinen-Tarttuva 1.0 Suomi Aikataulusta 12.4.: Salamavalaisun perusasiat ja yhden salaman käyttö potrettivalaisussa
EF70-200mm f/4l USM FIN. Käyttöohjeet
 EF70-200mm f/4l USM FIN Käyttöohjeet Kiitämme Canon-tuotteen hankinnasta. Canon EF70-200mm f/4l USM -objektiivi on Canon EOS -kameroille kehitetty pienikokoinen, tehokas telezoom-objektiivi. USM on lyhennys
EF70-200mm f/4l USM FIN Käyttöohjeet Kiitämme Canon-tuotteen hankinnasta. Canon EF70-200mm f/4l USM -objektiivi on Canon EOS -kameroille kehitetty pienikokoinen, tehokas telezoom-objektiivi. USM on lyhennys
6.6. Tasoitus ja terävöinti
 6.6. Tasoitus ja terävöinti Seuraavassa muutetaan pikselin arvoa perustuen mpäristön pikselien ominaisuuksiin. Kuvan 6.18.a nojalla ja Lukujen 3.4. ja 3.5. harmaasävjen käsittelssä esitellillä menetelmillä
6.6. Tasoitus ja terävöinti Seuraavassa muutetaan pikselin arvoa perustuen mpäristön pikselien ominaisuuksiin. Kuvan 6.18.a nojalla ja Lukujen 3.4. ja 3.5. harmaasävjen käsittelssä esitellillä menetelmillä
S11-04 Kompaktikamerat stereokamerajärjestelmässä. Projektisuunnitelma
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
Digikamera tutuksi 2016/12
 Digikamera tutuksi 2016/12 Ohjelma 9-11 teoria ja oman kameran asetukset 11.00 harjoitustehtävät, ryhmäjako opettajien esittely 11-11.30 tauko paikalla eväät tai kahvila 12-n.14 kuvausharjoituksia, puoli
Digikamera tutuksi 2016/12 Ohjelma 9-11 teoria ja oman kameran asetukset 11.00 harjoitustehtävät, ryhmäjako opettajien esittely 11-11.30 tauko paikalla eväät tai kahvila 12-n.14 kuvausharjoituksia, puoli
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
Uudet ominaisuudet BL F00
 Uudet ominaisuudet Versio 2.00 Tämän tuotteen mukana toimitetun asiakirjan sisältämät kuvaukset eivät enää välttämättä vastaa laiteohjelmistopäivitysten seurauksena lisättyjä tai muutettuja ominaisuuksia.
Uudet ominaisuudet Versio 2.00 Tämän tuotteen mukana toimitetun asiakirjan sisältämät kuvaukset eivät enää välttämättä vastaa laiteohjelmistopäivitysten seurauksena lisättyjä tai muutettuja ominaisuuksia.
Version 2. Lue tämä esite yhdessä kameran käyttöohjeen kanssa.
 Version 2 Tämä osa selostaa muutokset, jotka ovat tulleet kameran käyttöympäristön uuteen versioon - Dimâge EX Operating Environment Version 2. (kameran sisäinen käyttöohjelma) Lue tämä esite yhdessä kameran
Version 2 Tämä osa selostaa muutokset, jotka ovat tulleet kameran käyttöympäristön uuteen versioon - Dimâge EX Operating Environment Version 2. (kameran sisäinen käyttöohjelma) Lue tämä esite yhdessä kameran
Kuvaus- ja näyttöperiaatteet. Mikko Nuutinen 24.1.2013
 Kuvaus- ja näyttöperiaatteet Mikko Nuutinen 24.1.2013 Luennon oppimistavoitteet ja sisältö Kuvaus- ja näyttöketju Oppimistavoite on ymmärtää miten spektraalinen informaatio (n dim) detektoidaan 3-komponentiseksi
Kuvaus- ja näyttöperiaatteet Mikko Nuutinen 24.1.2013 Luennon oppimistavoitteet ja sisältö Kuvaus- ja näyttöketju Oppimistavoite on ymmärtää miten spektraalinen informaatio (n dim) detektoidaan 3-komponentiseksi
Kuvan- ja videontiivistys. Mikko Nuutinen 14.2.2013
 Kuvan- ja videontiivistys Mikko Nuutinen 14.2.2013 Oppimistavoitteet Redundanssi kuvissa: esimerkkitapauksina koodaus-, pikseleiden välinen sekä psykovisuaalinen redundanssi Kuvantiivistys: JPEG-koodauksen
Kuvan- ja videontiivistys Mikko Nuutinen 14.2.2013 Oppimistavoitteet Redundanssi kuvissa: esimerkkitapauksina koodaus-, pikseleiden välinen sekä psykovisuaalinen redundanssi Kuvantiivistys: JPEG-koodauksen
Valon havaitseminen. Näkövirheet ja silmän sairaudet. Silmä Näkö ja optiikka. Taittuminen. Valo. Heijastuminen
 Näkö Valon havaitseminen Silmä Näkö ja optiikka Näkövirheet ja silmän sairaudet Valo Taittuminen Heijastuminen Silmä Mitä silmän osia tunnistat? Värikalvo? Pupilli? Sarveiskalvo? Kovakalvo? Suonikalvo?
Näkö Valon havaitseminen Silmä Näkö ja optiikka Näkövirheet ja silmän sairaudet Valo Taittuminen Heijastuminen Silmä Mitä silmän osia tunnistat? Värikalvo? Pupilli? Sarveiskalvo? Kovakalvo? Suonikalvo?
X-Pro2 Uudet ominaisuudet
 BL00004958-F00 FI DIGITAL CAMERA X-Pro2 Uudet ominaisuudet Versio 4.00 Tämän tuotteen mukana toimitetun asiakirjan sisältämät kuvaukset eivät enää välttämättä vastaa laiteohjelmistopäivitysten seurauksena
BL00004958-F00 FI DIGITAL CAMERA X-Pro2 Uudet ominaisuudet Versio 4.00 Tämän tuotteen mukana toimitetun asiakirjan sisältämät kuvaukset eivät enää välttämättä vastaa laiteohjelmistopäivitysten seurauksena
Picasa 3 -kuvankäsittelyopas, osa 1, valokuvien muokkaus tutuksi
 Picasa 3 -kuvankäsittelyopas, osa 1, valokuvien muokkaus tutuksi Valokuvien muokkaaminen Käynnistettyäsi Picasa-ohjelman, eteesi avautuu niin sanottu arkistonäkymä. Näet täältä olemassa olevia valokuvia.
Picasa 3 -kuvankäsittelyopas, osa 1, valokuvien muokkaus tutuksi Valokuvien muokkaaminen Käynnistettyäsi Picasa-ohjelman, eteesi avautuu niin sanottu arkistonäkymä. Näet täältä olemassa olevia valokuvia.
Malleja ja menetelmiä geometriseen tietokonenäköön
 Malleja ja menetelmiä geometriseen tietokonenäköön Juho Kannala 7.5.2010 Johdanto Tietokonenäkö on ala, joka kehittää menetelmiä automaattiseen kuvien sisällön tulkintaan Tietokonenäkö on ajankohtainen
Malleja ja menetelmiä geometriseen tietokonenäköön Juho Kannala 7.5.2010 Johdanto Tietokonenäkö on ala, joka kehittää menetelmiä automaattiseen kuvien sisällön tulkintaan Tietokonenäkö on ajankohtainen
T-75.4100 Digitaalinen kuvatekniikka Kevät 2015 Harjoitus 1: Kameran kuvanprosessointi
 T-75.4100 Digitaalinen kuvatekniikka Kevät 2015 Harjoitus 1: Kameran kuvanprosessointi Palautus: 1.3.2015 1 1 Tavoite Työssä tutkitaan kolmea kameran kuvanprosessointiketjun vaihetta: tarkennusta, mosaiikkikuvan
T-75.4100 Digitaalinen kuvatekniikka Kevät 2015 Harjoitus 1: Kameran kuvanprosessointi Palautus: 1.3.2015 1 1 Tavoite Työssä tutkitaan kolmea kameran kuvanprosessointiketjun vaihetta: tarkennusta, mosaiikkikuvan
Ratkaisu: Maksimivalovoiman lauseke koostuu heijastimen maksimivalovoimasta ja valonlähteestä suoraan (ilman heijastumista) tulevasta valovoimasta:
 tulevasta valovoimasta:") LASKUHARJOITUS 1 VALAISIMIEN OPTIIKKA Tehtävä 1 Pistemäinen valonlähde (Φ = 1000 lm, valokappaleen luminanssi L = 2500 kcd/m 2 ) sijoitetaan 15 cm suuruisen pyörähdysparaboloidin muotoisen peiliheijastimen
LASKUHARJOITUS 1 VALAISIMIEN OPTIIKKA Tehtävä 1 Pistemäinen valonlähde (Φ = 1000 lm, valokappaleen luminanssi L = 2500 kcd/m 2 ) sijoitetaan 15 cm suuruisen pyörähdysparaboloidin muotoisen peiliheijastimen
IHMEEL- LINEN KUU TEKSTI // KRISTOFFER ENGBO
 IHMEEL- LINEN KUU TEKSTI // KRISTOFFER ENGBO Ennemmin tai myöhemmin moni kuvaaja innostuu yötaivaan valopilkusta. Keräsimme vinkkejä, joiden avulla onnistut kuukuvauksessa. Mukana on myös tärkeitä päivämääriä.
IHMEEL- LINEN KUU TEKSTI // KRISTOFFER ENGBO Ennemmin tai myöhemmin moni kuvaaja innostuu yötaivaan valopilkusta. Keräsimme vinkkejä, joiden avulla onnistut kuukuvauksessa. Mukana on myös tärkeitä päivämääriä.
Uudet ominaisuudet. Versio 2.00
 Uudet ominaisuudet Versio 2.00 Tämän tuotteen mukana toimitetun asiakirjan sisältämät kuvaukset eivät enää välttämättä vastaa laiteohjelmistopäivitysten seurauksena lisättyjä tai muutettuja ominaisuuksia.
Uudet ominaisuudet Versio 2.00 Tämän tuotteen mukana toimitetun asiakirjan sisältämät kuvaukset eivät enää välttämättä vastaa laiteohjelmistopäivitysten seurauksena lisättyjä tai muutettuja ominaisuuksia.
Tampereen yliopisto Tietokonegrafiikka 2013 Tietojenkäsittelytiede Harjoitus
 Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
Laskuharjoitus 9, tehtävä 6
 Aalto-yliopiston perustieteiden korkeakoulu Jouni Pousi Systeemianalyysin laboratorio Mat-2.4129 Systeemien identifiointi Laskuharjoitus 9, tehtävä 6 Tämä ohje sisältää vaihtoehtoisen tavan laskuharjoituksen
Aalto-yliopiston perustieteiden korkeakoulu Jouni Pousi Systeemianalyysin laboratorio Mat-2.4129 Systeemien identifiointi Laskuharjoitus 9, tehtävä 6 Tämä ohje sisältää vaihtoehtoisen tavan laskuharjoituksen
 Digitaalisen järjestelmäkameran käyttö Kuva-Artesaani Marko Koivistoinen http://www.peda.net/veraja/kuopio/kansalaisopisto/kuvataide/valokuvaus Kurssin sisältö Järjestelmäkameran perusrakenne Toiminta
Digitaalisen järjestelmäkameran käyttö Kuva-Artesaani Marko Koivistoinen http://www.peda.net/veraja/kuopio/kansalaisopisto/kuvataide/valokuvaus Kurssin sisältö Järjestelmäkameran perusrakenne Toiminta
PANASONIC NV-GS120EG. Digitaalivideokamera. Käyttöohje
 PANASONIC NV-GS120EG Digitaalivideokamera Käyttöohje Sodankylän kunta puh 040 73 511 63 Elokuvakasvatus Sodankylässä fax 016 618 155 Vasantie 11 email tommi.nevala@sodankyla.fi 99600 SODANKYLÄ 1 PANASONIC
PANASONIC NV-GS120EG Digitaalivideokamera Käyttöohje Sodankylän kunta puh 040 73 511 63 Elokuvakasvatus Sodankylässä fax 016 618 155 Vasantie 11 email tommi.nevala@sodankyla.fi 99600 SODANKYLÄ 1 PANASONIC
S-108-2110 OPTIIKKA 1/10 Laboratoriotyö: Polarisaatio POLARISAATIO. Laboratoriotyö
 S-108-2110 OPTIIKKA 1/10 POLARISAATIO Laboratoriotyö S-108-2110 OPTIIKKA 2/10 SISÄLLYSLUETTELO 1 Polarisaatio...3 2 Työn suoritus...6 2.1 Työvälineet...6 2.2 Mittaukset...6 2.2.1 Malus:in laki...6 2.2.2
S-108-2110 OPTIIKKA 1/10 POLARISAATIO Laboratoriotyö S-108-2110 OPTIIKKA 2/10 SISÄLLYSLUETTELO 1 Polarisaatio...3 2 Työn suoritus...6 2.1 Työvälineet...6 2.2 Mittaukset...6 2.2.1 Malus:in laki...6 2.2.2
VERTAILU: 55-TUUMAISET TELEVISIOT Oheisia kuvasäätöjä käytettiin Tekniikan Maailman numerossa 1/15 julkaistussa vertailussa.
 VERTAILU: 55-TUUMAISET TELEVISIOT Oheisia kuvasäätöjä käytettiin Tekniikan Maailman numerossa 1/15 julkaistussa vertailussa. LG 55UB850V digi-tv hdmi 2 KUVA Kuvatila Expert1 Expert1 Kuvan säätö Taustavalo
VERTAILU: 55-TUUMAISET TELEVISIOT Oheisia kuvasäätöjä käytettiin Tekniikan Maailman numerossa 1/15 julkaistussa vertailussa. LG 55UB850V digi-tv hdmi 2 KUVA Kuvatila Expert1 Expert1 Kuvan säätö Taustavalo
NEX-3/NEX-5/NEX-5C A-DTS-100-12(1) 2010 Sony Corporation
 2010 Sony Corporation") NEX-3/NEX-5/NEX-5C Tämän laiteohjelmistopäivityksen uudet toiminnot ja niiden toiminta on kuvattu tässä. Käyttöopas ja mukana toimitetulla CD-ROM-levyllä oleva α-käsikirja sisältävät lisätietoja. 2010
NEX-3/NEX-5/NEX-5C Tämän laiteohjelmistopäivityksen uudet toiminnot ja niiden toiminta on kuvattu tässä. Käyttöopas ja mukana toimitetulla CD-ROM-levyllä oleva α-käsikirja sisältävät lisätietoja. 2010
Kuvankäsi*ely 1. Digitaaliset kuvat ja niiden peruskäsi3eet. Kimmo Koskinen
 Kuvankäsi*ely 1 Digitaaliset kuvat ja niiden peruskäsi3eet Kimmo Koskinen Mitä kuvankäsi3ely on? Digitaalisten kuvien monipuolista muokkausta: - korjailua: roskien poisto, punaiset silmät jne - muuntelua:
Kuvankäsi*ely 1 Digitaaliset kuvat ja niiden peruskäsi3eet Kimmo Koskinen Mitä kuvankäsi3ely on? Digitaalisten kuvien monipuolista muokkausta: - korjailua: roskien poisto, punaiset silmät jne - muuntelua:
Kameroiden suorituskykymittaus
 Kameroiden suorituskykymittaus T-75.5100 Kuvaus- ja näyttötekniikka Mikko Nuutinen, 1.9.01 Luennon sisältö: Mitä kuvanlaatu on? Mittoja / menetelmiä: resoluutio, kohina, oecf, dynaaminen alue, värintoisto,
Kameroiden suorituskykymittaus T-75.5100 Kuvaus- ja näyttötekniikka Mikko Nuutinen, 1.9.01 Luennon sisältö: Mitä kuvanlaatu on? Mittoja / menetelmiä: resoluutio, kohina, oecf, dynaaminen alue, värintoisto,
7. Kuvankäsittely. 1. CCD havainnot. 2. CCD kuvien jälkikäsittely 3. FITS. 4. Kuvankatseluohjelmistoja. 5. Kuvankäsittelyohjelmistoja. 6.
 7. Kuvankäsittely 1. CCD havainnot 2. CCD kuvien jälkikäsittely 3. FITS 4. Kuvankatseluohjelmistoja 5. Kuvankäsittelyohjelmistoja 6. Demo 7.1 CCD havainnot 1. Jäähdytys 2. Darkit (jos tarpeen) 3. Biakset
7. Kuvankäsittely 1. CCD havainnot 2. CCD kuvien jälkikäsittely 3. FITS 4. Kuvankatseluohjelmistoja 5. Kuvankäsittelyohjelmistoja 6. Demo 7.1 CCD havainnot 1. Jäähdytys 2. Darkit (jos tarpeen) 3. Biakset
TAPAA. TARKENTAA Nils Wille Christoffersen
 KOLME TAPAA TARKENTAA Nils Wille Christoffersen Uusi hybriditarkennus toimii erittäin nopeasti. Sen ansiosta KUVAAJA PYSYY TAHDISSA NOPEISSAKIN TILANTEISSA. Tässä artikkelissa kerrotaan, miten hybriditarkennus
KOLME TAPAA TARKENTAA Nils Wille Christoffersen Uusi hybriditarkennus toimii erittäin nopeasti. Sen ansiosta KUVAAJA PYSYY TAHDISSA NOPEISSAKIN TILANTEISSA. Tässä artikkelissa kerrotaan, miten hybriditarkennus
Kojemeteorologia. Sami Haapanala syksy 2013. Fysiikan laitos, Ilmakehätieteiden osasto
 Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Datan käsittely ja tallentaminen Käytännössä kaikkien mittalaitteiden ensisijainen signaali on analoginen Jotta tämä
Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Datan käsittely ja tallentaminen Käytännössä kaikkien mittalaitteiden ensisijainen signaali on analoginen Jotta tämä
hp photosmart 930 -sarjan digitaalikamera
 hp photosmart 930 -sarjan digitaalikamera user's manual käyttöopas Tavaramerkki- ja tekijänoikeustiedot Copyright 2003 Hewlett-Packard Company Kaikki oikeudet pidätetään. Mitään tämän asiakirjan osaa
hp photosmart 930 -sarjan digitaalikamera user's manual käyttöopas Tavaramerkki- ja tekijänoikeustiedot Copyright 2003 Hewlett-Packard Company Kaikki oikeudet pidätetään. Mitään tämän asiakirjan osaa
10.2. Säteenjäljitys ja radiositeettialgoritmi. Säteenjäljitys
 10.2. Säteenjäljitys ja radiositeettialgoritmi Säteenjäljitys Säteenjäljityksessä (T. Whitted 1980) valonsäteiden kulkema reitti etsitään käänteisessä järjestyksessä katsojan silmästä takaisin kuvaan valolähteeseen
10.2. Säteenjäljitys ja radiositeettialgoritmi Säteenjäljitys Säteenjäljityksessä (T. Whitted 1980) valonsäteiden kulkema reitti etsitään käänteisessä järjestyksessä katsojan silmästä takaisin kuvaan valolähteeseen
LENS EF28 135mm f/3.5 5.6 IS USM. Käyttöohjeet
 LENS EF28 135mm f/3.5 5.6 IS USM FIN Käyttöohjeet Suomenkieliset käyttöohjeet Kiitämme Canon-tuotteen hankinnasta. Canon EF28 135mm f/3,5 5,6 IS USM on EOSkameroihin kehitetty tehokas objektiivi, joka
LENS EF28 135mm f/3.5 5.6 IS USM FIN Käyttöohjeet Suomenkieliset käyttöohjeet Kiitämme Canon-tuotteen hankinnasta. Canon EF28 135mm f/3,5 5,6 IS USM on EOSkameroihin kehitetty tehokas objektiivi, joka
Asiat jotka sinun pitäisi tietää ja hallita ennen hyvien valokuvien ottamista
 Kunnon Kuvan ABC Asiat jotka sinun pitäisi tietää ja hallita ennen hyvien valokuvien ottamista Kamerassa on himmennin, jolla määrätään aukon koko. Suljin taas määrää kuinka kauan valoa päästetään kennolle.
Kunnon Kuvan ABC Asiat jotka sinun pitäisi tietää ja hallita ennen hyvien valokuvien ottamista Kamerassa on himmennin, jolla määrätään aukon koko. Suljin taas määrää kuinka kauan valoa päästetään kennolle.
Valokuvauksen opintopiiri
 Valokuvauksen opintopiiri Valokuvaus on maalaamista valolla kameraa käyttäen. (tuntematon ajattelija) Valokuvaus on menetelmä, jossa valokuvia talletetaan valoherkälle materiaalille kameran avulla. Perinteisessä
Valokuvauksen opintopiiri Valokuvaus on maalaamista valolla kameraa käyttäen. (tuntematon ajattelija) Valokuvaus on menetelmä, jossa valokuvia talletetaan valoherkälle materiaalille kameran avulla. Perinteisessä
Digikuvan peruskäsittelyn. sittelyn työnkulku. Soukan Kamerat 22.1.2007. Soukan Kamerat/SV
 Digikuvan peruskäsittelyn sittelyn työnkulku Soukan Kamerat 22.1.2007 Sisält ltö Digikuvan siirtäminen kamerasta tietokoneelle Skannaus Kuvan kääntäminen Värien säätö Sävyjen säätö Kuvan koko ja resoluutio
Digikuvan peruskäsittelyn sittelyn työnkulku Soukan Kamerat 22.1.2007 Sisält ltö Digikuvan siirtäminen kamerasta tietokoneelle Skannaus Kuvan kääntäminen Värien säätö Sävyjen säätö Kuvan koko ja resoluutio
12. Kuvankäsittely. 1. CCD havainnot. 2. CCD kuvien jälkikäsittely 3. FITS. 4. Kuvankatseluohjelmistoja. 5. Kuvankäsittelyohjelmistoja. 6.
 12. Kuvankäsittely 1. CCD havainnot 2. CCD kuvien jälkikäsittely 3. FITS 4. Kuvankatseluohjelmistoja 5. Kuvankäsittelyohjelmistoja 6. Demo 12.1 CCD havainnot 1. Jäähdytys 2. Darkit (jos tarpeen) 3. Biakset
12. Kuvankäsittely 1. CCD havainnot 2. CCD kuvien jälkikäsittely 3. FITS 4. Kuvankatseluohjelmistoja 5. Kuvankäsittelyohjelmistoja 6. Demo 12.1 CCD havainnot 1. Jäähdytys 2. Darkit (jos tarpeen) 3. Biakset
TEKSTI // POUL SIERSBÆK. Ohjeet ja tekniikka. Kun eläimiä kuvataan piilokojusta, voi tarkennus lukittua. Digikuva 2015
 TEKSTI // POUL SIERSBÆK Kun eläimiä kuvataan piilokojusta, voi tarkennus lukittua esimerkiksi ruohoon. Se vältetään tarkentamalla käsin. Ohjeet ja tekniikka TARKENNA 72 KÄSIN Käsin tarkentamalla pärjäät
TEKSTI // POUL SIERSBÆK Kun eläimiä kuvataan piilokojusta, voi tarkennus lukittua esimerkiksi ruohoon. Se vältetään tarkentamalla käsin. Ohjeet ja tekniikka TARKENNA 72 KÄSIN Käsin tarkentamalla pärjäät
TEKSTI // FRANK SEBASTIAN HANSEN. Hallitse KUVATYYLIT A S P N F M. Digikuva 2016
 TEKSTI // FRANK SEBASTIAN HANSEN Hallitse KUVATYYLIT A S P N F M L 34 Kuvatyylillä Maisema tulee taivaan sinisestä ja kasvien vihreästä kylläisiä. 1/200 SEKUNTI F10 ISO 200 24 MM Jo kuvausvaiheessa voit
TEKSTI // FRANK SEBASTIAN HANSEN Hallitse KUVATYYLIT A S P N F M L 34 Kuvatyylillä Maisema tulee taivaan sinisestä ja kasvien vihreästä kylläisiä. 1/200 SEKUNTI F10 ISO 200 24 MM Jo kuvausvaiheessa voit
404 CAMCORDER CAMCORDERIN & KAMERAN TOIMINTA
 Suomi Finnish 404 CAMCORDER CAMCORDERIN & KAMERAN TOIMINTA Liitteet ARCHOS 404 -käyttöoppaaseen Katso www.archos.com/manuals ladataksesi tämän käyttöoppaan viimeisimnman version. Versio 1.1 Tämä käyttöopas
Suomi Finnish 404 CAMCORDER CAMCORDERIN & KAMERAN TOIMINTA Liitteet ARCHOS 404 -käyttöoppaaseen Katso www.archos.com/manuals ladataksesi tämän käyttöoppaan viimeisimnman version. Versio 1.1 Tämä käyttöopas
S09 04 Kohteiden tunnistaminen 3D datasta
 AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
VALOKUVAUKSEN PERUSTEET
 VALOKUVAUKSEN PERUSTEET Sampsa Sulonen sampsa.sulonen@suomenlatu.fi +358408343174 @sampsasulo Kameroiden ominaisuudet Kennon koko ja sen vaikutukset Megapikselimäärät Peilitön tai peilillinen Tarkennuksen
VALOKUVAUKSEN PERUSTEET Sampsa Sulonen sampsa.sulonen@suomenlatu.fi +358408343174 @sampsasulo Kameroiden ominaisuudet Kennon koko ja sen vaikutukset Megapikselimäärät Peilitön tai peilillinen Tarkennuksen
Täydennyskoulutus Hermanni Lehtomäki
 Täydennyskoulutus 2.2.2017 Hermanni Lehtomäki 4.2.2017 1 Vaaralantie 20 01230 Vantaa 098761011 info@infradex.fi Täydennyskoulutus 2.2.2017 Uudet FLIR tuotteet Lämpökameroiden uudet ominaisuudet RT-kortti
Täydennyskoulutus 2.2.2017 Hermanni Lehtomäki 4.2.2017 1 Vaaralantie 20 01230 Vantaa 098761011 info@infradex.fi Täydennyskoulutus 2.2.2017 Uudet FLIR tuotteet Lämpökameroiden uudet ominaisuudet RT-kortti
Upeita kuvia heikossakin valossa
 Tiedote 6.8.2009 Upeita kuvia heikossakin valossa Uudet TX1 ja WX1 -mallit ovat yhteensopivia oman henkilökohtaisen valokuvaajan, Party-shot IPT-DS1:n kanssa. Sonyn Cyber-shot TX1 ja WX1 -kamerat esittelevät
Tiedote 6.8.2009 Upeita kuvia heikossakin valossa Uudet TX1 ja WX1 -mallit ovat yhteensopivia oman henkilökohtaisen valokuvaajan, Party-shot IPT-DS1:n kanssa. Sonyn Cyber-shot TX1 ja WX1 -kamerat esittelevät
Loistavien kuvien ottaminen ON helppoa! Parempia kuvia Image Stabilizer (kuvanvakain) -objektiiveilla
 -objektiiveilla") Loistavien kuvien ottaminen ON helppoa! Parempia kuvia Image Stabilizer (kuvanvakain) -objektiiveilla Tuleeko kuvistasi usein epäselviä? Ratkaisu on Canon IS* -objektiivi! Hieno kuva! Vai onko? Kun suurennat
Loistavien kuvien ottaminen ON helppoa! Parempia kuvia Image Stabilizer (kuvanvakain) -objektiiveilla Tuleeko kuvistasi usein epäselviä? Ratkaisu on Canon IS* -objektiivi! Hieno kuva! Vai onko? Kun suurennat
Kauniaisten kaupunki
 Kauniaisten kaupunki Keskusurheilukenttä Valaistuslaskenta RAPORTTI LiCon-AT Oy Matleena Sirkiä Hyvinkää 13.3.2013 Sisällys 1 KÄSITTEET... 1 1.1 Valovirta... 1 1.2 Valovoima... 1 1.3 Valaistusvoimakkuus...
Kauniaisten kaupunki Keskusurheilukenttä Valaistuslaskenta RAPORTTI LiCon-AT Oy Matleena Sirkiä Hyvinkää 13.3.2013 Sisällys 1 KÄSITTEET... 1 1.1 Valovirta... 1 1.2 Valovoima... 1 1.3 Valaistusvoimakkuus...
Successive approximation AD-muunnin
 AD-muunnin Koostuu neljästä osasta: näytteenotto- ja pitopiiristä, (sample and hold S/H) komparaattorista, digitaali-analogiamuuntimesta (DAC) ja siirtorekisteristä. (successive approximation register
AD-muunnin Koostuu neljästä osasta: näytteenotto- ja pitopiiristä, (sample and hold S/H) komparaattorista, digitaali-analogiamuuntimesta (DAC) ja siirtorekisteristä. (successive approximation register
Uusi α850 - Lompakolle ystävällinen digijärkkäri kaikilla mausteilla
 Helsinki, 27.8. 2009 Uusi α850 - Lompakolle ystävällinen digijärkkäri kaikilla mausteilla Täysikokoinen, 24,6 megapikselin Exmor CMOS -kenno ja kaksinkertaiset BIONZ-prosessorit mahdollistavat yksityiskohtaiset
Helsinki, 27.8. 2009 Uusi α850 - Lompakolle ystävällinen digijärkkäri kaikilla mausteilla Täysikokoinen, 24,6 megapikselin Exmor CMOS -kenno ja kaksinkertaiset BIONZ-prosessorit mahdollistavat yksityiskohtaiset
DSLR-A900/DSLR-A850 A-DWD-100-11(1) 2010 Sony Corporation
 2010 Sony Corporation") DSLR-A900/DSLR-A850 Tämän päivityksen uudet toiminnot ja niiden toiminta on kuvattu tässä. Jos haluat lisätietoja, lue kameran mukana toimitettu Käyttöopas. 2010 Sony Corporation A-DWD-100-11(1) Tämän
DSLR-A900/DSLR-A850 Tämän päivityksen uudet toiminnot ja niiden toiminta on kuvattu tässä. Jos haluat lisätietoja, lue kameran mukana toimitettu Käyttöopas. 2010 Sony Corporation A-DWD-100-11(1) Tämän
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
T10xx-sarjan pikaopas (2016)
") Kameran etupuolen toiminnot Kuva oikealta 1.Etsimen diopterikorjauksen säätönuppi. 2.Käsihihna. 3.Digitaalisen zoomauksen painike. 4.Tallennuspainike (painapohjaan). Huom! Lämpökameran voi määrittää tarkentamaan
Kameran etupuolen toiminnot Kuva oikealta 1.Etsimen diopterikorjauksen säätönuppi. 2.Käsihihna. 3.Digitaalisen zoomauksen painike. 4.Tallennuspainike (painapohjaan). Huom! Lämpökameran voi määrittää tarkentamaan
Uudet ominaisuudet. Versio 2.00
 Uudet ominaisuudet Versio 2.00 Tämän tuotteen mukana toimitetun asiakirjan sisältämät kuvaukset eivät enää välttämättä vastaa laiteohjelmistopäivitysten seurauksena lisättyjä tai muutettuja ominaisuuksia.
Uudet ominaisuudet Versio 2.00 Tämän tuotteen mukana toimitetun asiakirjan sisältämät kuvaukset eivät enää välttämättä vastaa laiteohjelmistopäivitysten seurauksena lisättyjä tai muutettuja ominaisuuksia.
RATKAISUT: 16. Peilit ja linssit
 Physica 9 1 painos 1(6) : 161 a) Kupera linssi on linssi, jonka on keskeltä paksumpi kuin reunoilta b) Kupera peili on peili, jossa heijastava pinta on kaarevan pinnan ulkopinnalla c) Polttopiste on piste,
Physica 9 1 painos 1(6) : 161 a) Kupera linssi on linssi, jonka on keskeltä paksumpi kuin reunoilta b) Kupera peili on peili, jossa heijastava pinta on kaarevan pinnan ulkopinnalla c) Polttopiste on piste,
LED VALON KÄYTTÖSOVELLUKSIA.
 LED VALON KÄYTTÖSOVELLUKSIA. PALJONKO LED VALO ANTAA VALOA? MITÄ EROJA ON ERI LINSSEILLÄ? Onko LED -valosta haastajaksi halogeenivalolle? Linssien avautumiskulma ja valoteho 8 (LED 3K, LED 6K ja halogeeni
LED VALON KÄYTTÖSOVELLUKSIA. PALJONKO LED VALO ANTAA VALOA? MITÄ EROJA ON ERI LINSSEILLÄ? Onko LED -valosta haastajaksi halogeenivalolle? Linssien avautumiskulma ja valoteho 8 (LED 3K, LED 6K ja halogeeni
1080p:n TruVision HD- TVI-wedge-kameran määritysohj
 1080p:n TruVision HD- TVI-wedge-kameran määritysohj P/N 1073184-FI REV A ISS 22MAR17 Copyright Tavaramerkit ja patentit Valmistaja Yhteystiedot Asiakaspalvelu 2017 United Technologies Corporation. Interlogix
1080p:n TruVision HD- TVI-wedge-kameran määritysohj P/N 1073184-FI REV A ISS 22MAR17 Copyright Tavaramerkit ja patentit Valmistaja Yhteystiedot Asiakaspalvelu 2017 United Technologies Corporation. Interlogix
High Dynamic Range. Simo Veikkolainen 6.9.2010
 High Dynamic Range Simo Veikkolainen 6.9.2010 High Dynamic Range High Dynamic Range: kuvantamista jossa kuvaan saadaan laajempi dynamiikka kuin mitä kamera pystyy tallentamaan Dynamiikalla tarkoitetaan
High Dynamic Range Simo Veikkolainen 6.9.2010 High Dynamic Range High Dynamic Range: kuvantamista jossa kuvaan saadaan laajempi dynamiikka kuin mitä kamera pystyy tallentamaan Dynamiikalla tarkoitetaan
Valo, valonsäde, väri
 Kokeellista fysiikkaa luokanopettajille Ari Hämäläinen kevät 2005 Valo, valonsäde, väri Näkeminen, valonlähteet Pimeässä ei ole valoa, eikä pimeässä näe. Näkeminen perustuu esineiden lähettämään valoon,
Kokeellista fysiikkaa luokanopettajille Ari Hämäläinen kevät 2005 Valo, valonsäde, väri Näkeminen, valonlähteet Pimeässä ei ole valoa, eikä pimeässä näe. Näkeminen perustuu esineiden lähettämään valoon,
Kun yritän luoda täydellisen kuvan, käytän aina tarkoin määriteltyjä
 Täydellisen kuvan niksit Kun yritän luoda täydellisen kuvan, käytän aina tarkoin määriteltyjä suuntaviivoja. Kutsun niitä 9 elementiksi. Tässä artikkelissa käyn läpi mitä tarvitsen ja mitä otan huomioon
Täydellisen kuvan niksit Kun yritän luoda täydellisen kuvan, käytän aina tarkoin määriteltyjä suuntaviivoja. Kutsun niitä 9 elementiksi. Tässä artikkelissa käyn läpi mitä tarvitsen ja mitä otan huomioon
E-520. Tekniset tiedot. Tyyppi. Kuvakenno. Prosessori. Suodin. Sisäänrakennettu kuvanvakaaja kaikille objektiiveille
 E-520 Sisäänrakennettu kuvanvakaaja kaikille objektiiveille Loistava pölynpoistojärjestelmä Ammattimaiset toiminnot 10 megapikselin Live MOS -kenno Helppokäyttöinen Live View - suorakatselu kiitos nopean
E-520 Sisäänrakennettu kuvanvakaaja kaikille objektiiveille Loistava pölynpoistojärjestelmä Ammattimaiset toiminnot 10 megapikselin Live MOS -kenno Helppokäyttöinen Live View - suorakatselu kiitos nopean
S85 laseretäisyysanturi
 Anturi Valokennot Etäisyysanturit S85 laseretäisyysanturi Laser 2-luokan näkyvä valo helpottaa asennusta Tunnistusetäisyys 10 tai 20 m, tarkkuus 7 mm, toistotarkkuus 1 mm 4-20 ma tai 0-10 V skaalattava
Anturi Valokennot Etäisyysanturit S85 laseretäisyysanturi Laser 2-luokan näkyvä valo helpottaa asennusta Tunnistusetäisyys 10 tai 20 m, tarkkuus 7 mm, toistotarkkuus 1 mm 4-20 ma tai 0-10 V skaalattava
Näyttö. 460.000 kuvapistettä 10 linssiä / 8 ryhmää Asfäärisiä linssielementtejä
 TG 860 Vesitiivis 15m**, iskunkestävä 2.1m***, puristuksenkesto 100kg**** ja pakkasenkestävä - 10 C 16 megapikselin taustavalaistu CMOS 7,6 cm/3,0" 460 000 kuvapisteen kallistuva LCD-näyttö 5-akselinen
TG 860 Vesitiivis 15m**, iskunkestävä 2.1m***, puristuksenkesto 100kg**** ja pakkasenkestävä - 10 C 16 megapikselin taustavalaistu CMOS 7,6 cm/3,0" 460 000 kuvapisteen kallistuva LCD-näyttö 5-akselinen
Mini0801 Dash Kamera
 Käyttöohje Mini0801 Dash Kamera Lue tämä käyttöohje huolellisesti ennen käyttöä. 1. X24 FullHD ajoneuvokamera (Mini0801) 1.1 X24 Dash kamera pakkauksen sisältö Kamerayksikkä (vaatii lisäksi erillisen muistikortin)
Käyttöohje Mini0801 Dash Kamera Lue tämä käyttöohje huolellisesti ennen käyttöä. 1. X24 FullHD ajoneuvokamera (Mini0801) 1.1 X24 Dash kamera pakkauksen sisältö Kamerayksikkä (vaatii lisäksi erillisen muistikortin)
LAS-TIEDOSTON SISÄLTÖ LIITE 2/1
 LAS-TIEDOSTON SISÄLTÖ LIITE 2/1 LAS-TIEDOSTON SISÄLTÖ Las-tiedoston version 1.4 mukainen runko koostuu neljästä eri lohkosta, ja jokaiseen lohkoon voidaan tallentaa vain standardissa sovittua tietoa ja
LAS-TIEDOSTON SISÄLTÖ LIITE 2/1 LAS-TIEDOSTON SISÄLTÖ Las-tiedoston version 1.4 mukainen runko koostuu neljästä eri lohkosta, ja jokaiseen lohkoon voidaan tallentaa vain standardissa sovittua tietoa ja
6. Analogisen signaalin liittäminen mikroprosessoriin 2 6.1 Näytteenotto analogisesta signaalista 2 6.2. DA-muuntimet 4
 Datamuuntimet 1 Pekka antala 19.11.2012 Datamuuntimet 6. Analogisen signaalin liittäminen mikroprosessoriin 2 6.1 Näytteenotto analogisesta signaalista 2 6.2. DA-muuntimet 4 7. AD-muuntimet 5 7.1 Analoginen
Datamuuntimet 1 Pekka antala 19.11.2012 Datamuuntimet 6. Analogisen signaalin liittäminen mikroprosessoriin 2 6.1 Näytteenotto analogisesta signaalista 2 6.2. DA-muuntimet 4 7. AD-muuntimet 5 7.1 Analoginen
Uudet ominaisuudet. Versio 2.10 BL F00
 Uudet ominaisuudet Versio 2.10 Tämän tuotteen mukana toimitetun asiakirjan sisältämät kuvaukset eivät enää välttämättä vastaa laiteohjelmistopäivitysten seurauksena lisättyjä tai muutettuja ominaisuuksia.
Uudet ominaisuudet Versio 2.10 Tämän tuotteen mukana toimitetun asiakirjan sisältämät kuvaukset eivät enää välttämättä vastaa laiteohjelmistopäivitysten seurauksena lisättyjä tai muutettuja ominaisuuksia.
VALAISTUSTA VALOSTA. Fysiikan ja kemian perusteet ja pedagogiikka. Kari Sormunen Kevät 2014
 VALAISTUSTA VALOSTA Fysiikan ja kemian perusteet ja pedagogiikka Kari Sormunen Kevät 2014 OPPILAIDEN KÄSITYKSIÄ VALOSTA Oppilaat kuvittelevat, että valo etenee katsojan silmästä katsottavaan kohteeseen.
VALAISTUSTA VALOSTA Fysiikan ja kemian perusteet ja pedagogiikka Kari Sormunen Kevät 2014 OPPILAIDEN KÄSITYKSIÄ VALOSTA Oppilaat kuvittelevat, että valo etenee katsojan silmästä katsottavaan kohteeseen.
2D piirrelaskennan alkeet, osa I
 2D piirrelaskennan alkeet, osa I Ville Tirronen aleator@jyu.fi University of Jyväskylä 18. syyskuuta 2008 Näkökulma Aiheet Tarkastellaan yksinkertaisia 2D kuvankäsittelyoperaattoreita Näkökulmana on tunnistava
2D piirrelaskennan alkeet, osa I Ville Tirronen aleator@jyu.fi University of Jyväskylä 18. syyskuuta 2008 Näkökulma Aiheet Tarkastellaan yksinkertaisia 2D kuvankäsittelyoperaattoreita Näkökulmana on tunnistava
A11-07 Measurements with machine vision Projektisuunnitelma
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-07 Measurements with machine vision Projektisuunnitelma Niko Nyrhilä 25.9.2011 Niko Nyrhilä 2 1 Projektityön tavoite Projektityön tavoitteena
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-07 Measurements with machine vision Projektisuunnitelma Niko Nyrhilä 25.9.2011 Niko Nyrhilä 2 1 Projektityön tavoite Projektityön tavoitteena
EF24-105mm f/4l IS USM
 EF24-105mm f/4l IS USM FIN Käyttöohjeet Kiitämme Canon-tuotteen hankinnasta. Canon EF24-105mm f/4l IS USM objektiivi on EOS-kameroille kehitetty korkealaatuinen, standardi zoom-objektiivi. Siinä on kuvan
EF24-105mm f/4l IS USM FIN Käyttöohjeet Kiitämme Canon-tuotteen hankinnasta. Canon EF24-105mm f/4l IS USM objektiivi on EOS-kameroille kehitetty korkealaatuinen, standardi zoom-objektiivi. Siinä on kuvan
VÄRISPEKTRIKUVIEN TEHOKAS SIIRTO TIETOVERKOISSA
 VÄRISPEKTRIKUVIEN TEHOKAS SIIRTO TIETOVERKOISSA Juha Lehtonen 20.3.2002 Joensuun yliopisto Tietojenkäsittelytiede Kandidaatintutkielma ESIPUHE Olen kirjoittanut tämän kandidaatintutkielman Joensuun yliopistossa
VÄRISPEKTRIKUVIEN TEHOKAS SIIRTO TIETOVERKOISSA Juha Lehtonen 20.3.2002 Joensuun yliopisto Tietojenkäsittelytiede Kandidaatintutkielma ESIPUHE Olen kirjoittanut tämän kandidaatintutkielman Joensuun yliopistossa
3D-kuvauksen tekniikat ja sovelluskohteet. Mikael Hornborg
 3D-kuvauksen tekniikat ja sovelluskohteet Mikael Hornborg Luennon sisältö 1. Optiset koordinaattimittauskoneet 2. 3D skannerit 3. Sovelluskohteet Johdanto Optiset mittaustekniikat perustuvat valoon ja
3D-kuvauksen tekniikat ja sovelluskohteet Mikael Hornborg Luennon sisältö 1. Optiset koordinaattimittauskoneet 2. 3D skannerit 3. Sovelluskohteet Johdanto Optiset mittaustekniikat perustuvat valoon ja
Havaitsevan tähtitieteen peruskurssi I, yhteenveto
 Havaitsevan tähtitieteen peruskurssi I, yhteenveto Luento 23.4.2009, T. Hackman & J. Näränen 1. Yleisesti tärkeätä Peruskäsitteet Mitä havaintomenetelmää kannatta käyttää? Minkälaista teleskooppia millekin
Havaitsevan tähtitieteen peruskurssi I, yhteenveto Luento 23.4.2009, T. Hackman & J. Näränen 1. Yleisesti tärkeätä Peruskäsitteet Mitä havaintomenetelmää kannatta käyttää? Minkälaista teleskooppia millekin
ENERGY SAVING LAMPS. Energiansäästölamput 2008
 Energiansäästölamput 2008 GP Saving Lamps Edut Säästää ympäristöä, vähentää hiilidioksidipäästöjä CO². Kestää 8-12 kertaa kauemmin* Vähentää kotitalouksien sähkönkulutusta jopa 80%* ja näin ollen myös
Energiansäästölamput 2008 GP Saving Lamps Edut Säästää ympäristöä, vähentää hiilidioksidipäästöjä CO². Kestää 8-12 kertaa kauemmin* Vähentää kotitalouksien sähkönkulutusta jopa 80%* ja näin ollen myös
Nauti muistoista enemmän Sonyn. PlayMemories-sovellusperheellä
 osokuna Lehdistötiedote Julkaisuvapaa 29.8.2012 klo 17.45 Nauti muistoista enemmän Sonyn PlayMemories-sovellusperheellä Sonyn PlayMemories-sovellusperhe monipuolistaa kameraan, älypuhelimeen ja tablettiin
osokuna Lehdistötiedote Julkaisuvapaa 29.8.2012 klo 17.45 Nauti muistoista enemmän Sonyn PlayMemories-sovellusperheellä Sonyn PlayMemories-sovellusperhe monipuolistaa kameraan, älypuhelimeen ja tablettiin
Anatomisia taitekohtia kannattaa varoa. Anatomisia taitekohtia ovat nilkat, polvet, haarus, kyynärpää ja yleensä vartalon taitekohdat.
 1 2 Dokumentin aiheen totuus on usein laajempi kuin mitä videolle on voitu vangita. Siksi dokumentin ennakkotutkimusvaihe on olennainen dokumentin lopullisen totuudellisuuden kannalta. Tässä vaiheessa
1 2 Dokumentin aiheen totuus on usein laajempi kuin mitä videolle on voitu vangita. Siksi dokumentin ennakkotutkimusvaihe on olennainen dokumentin lopullisen totuudellisuuden kannalta. Tässä vaiheessa
Mini0801 Dash Kamera
 Käyttöohje Mini0801 Dash Kamera Lue tämä käyttöohje huolellisesti ennen käyttöä. 1. X24 Super HD ajoneuvokamera (Mini0801) 1.1 X24 Dash kamera pakkauksen sisältö Kamerayksikkä (vaatii lisäksi erillisen
Käyttöohje Mini0801 Dash Kamera Lue tämä käyttöohje huolellisesti ennen käyttöä. 1. X24 Super HD ajoneuvokamera (Mini0801) 1.1 X24 Dash kamera pakkauksen sisältö Kamerayksikkä (vaatii lisäksi erillisen
Havaitsevan tähtitieteen pk 1 luento 12, Kalvot: Jyri Näränen & Mikael Granvik
 Havaitsevan tähtitieteen pk 1 luento 12, Kalvot: Jyri Näränen & Mikael Granvik 7. Kuvankäsittely 7. Kuvankäsittely 1. CCD kuvien jälkikäsittely 7. Kuvankäsittely 1. CCD kuvien jälkikäsittely 2. CCD havaintojen
Havaitsevan tähtitieteen pk 1 luento 12, Kalvot: Jyri Näränen & Mikael Granvik 7. Kuvankäsittely 7. Kuvankäsittely 1. CCD kuvien jälkikäsittely 7. Kuvankäsittely 1. CCD kuvien jälkikäsittely 2. CCD havaintojen
DYNAAMINEN ULOTTUVUUS DIGITAALISESSA VALOKUVAUKSESSA
 DYNAAMINEN ULOTTUVUUS DIGITAALISESSA VALOKUVAUKSESSA LAHDEN AMMATTIKORKEAKOULU Mediatekniikan koulutusohjelma Teknisen visualisoinnin suuntautumisvaihtoehto Opinnäytetyö 10.5.2010 Heikki Laaninen Lahden
DYNAAMINEN ULOTTUVUUS DIGITAALISESSA VALOKUVAUKSESSA LAHDEN AMMATTIKORKEAKOULU Mediatekniikan koulutusohjelma Teknisen visualisoinnin suuntautumisvaihtoehto Opinnäytetyö 10.5.2010 Heikki Laaninen Lahden
EF300mm f/4l IS USM FIN. Käyttöohjeet
 EF300mm f/4l IS USM FIN Käyttöohjeet Kiitämme Canon-tuotteen hankinnasta. Canon EF300mm f/4l IS USM objektiivi on EOS -kameroille kehitetty tehokas telezoomobjektiivi, joka on varustettu kuvan vakaajalla.
EF300mm f/4l IS USM FIN Käyttöohjeet Kiitämme Canon-tuotteen hankinnasta. Canon EF300mm f/4l IS USM objektiivi on EOS -kameroille kehitetty tehokas telezoomobjektiivi, joka on varustettu kuvan vakaajalla.
valo Valokuvauksessa käytettävien valonlähteiden
 Vallitseva valo Valokuvauksessa käytettävien valonlähteiden joukossa kotien, työpaikkojen, katujen ja julkisten tilojen keinovalaistusta ei pidetä juuri arvossa. Päivänvalo on luonnollisin valonlähde.
Vallitseva valo Valokuvauksessa käytettävien valonlähteiden joukossa kotien, työpaikkojen, katujen ja julkisten tilojen keinovalaistusta ei pidetä juuri arvossa. Päivänvalo on luonnollisin valonlähde.
1. Polarimetria. voidaan tutkia mm. planeettojen ilmakehien ja tähtien välistä pölyä.
 Polarimetria Tekijät: Immonen Antti, Nieminen Anni, Partti Jussi, Pylkkänen Kaisa ja Viljakainen Antton Koulut: Mikkelin Lyseon lukio ja Mikkelin Yhteiskoulun lukio Päiväys: 21.11.2008 Lukion oppiaine:
Polarimetria Tekijät: Immonen Antti, Nieminen Anni, Partti Jussi, Pylkkänen Kaisa ja Viljakainen Antton Koulut: Mikkelin Lyseon lukio ja Mikkelin Yhteiskoulun lukio Päiväys: 21.11.2008 Lukion oppiaine:
VALOKUVAAMINEN PITKÄLLÄ SULJINAJALLA Tomi Mäkelä
 VALOKUVAAMINEN PITKÄLLÄ SULJINAJALLA Tomi Mäkelä Opinnäytetyö Jyväskylän ammattiopisto, Tekniikan ja liikenteen yksikkö AV-viestintä Maaliskuu 2015 SISÄLLYSLUETTELO 1 Johdanto 3 2 Välineet 3 3 Kuvaaminen
VALOKUVAAMINEN PITKÄLLÄ SULJINAJALLA Tomi Mäkelä Opinnäytetyö Jyväskylän ammattiopisto, Tekniikan ja liikenteen yksikkö AV-viestintä Maaliskuu 2015 SISÄLLYSLUETTELO 1 Johdanto 3 2 Välineet 3 3 Kuvaaminen
Dynamiikan hallinta Lähde: Zölzer. Digital audio signal processing. Wiley & Sons, 2008. Zölzer (ed.) DAFX Digital Audio Effects. Wiley & Sons, 2002.
 DAFX Digital Audio Effects. Wiley & Sons, 2002.") Dynamiikan hallinta Lähde: Zölzer. Digital audio signal processing. Wiley & Sons, 2008. Zölzer (ed. DAFX Digital Audio Effects. Wiley & Sons, 2002. Sisältö:! Johdanto!! Ajallinen käyttäytyminen! oteutus!
Dynamiikan hallinta Lähde: Zölzer. Digital audio signal processing. Wiley & Sons, 2008. Zölzer (ed. DAFX Digital Audio Effects. Wiley & Sons, 2002. Sisältö:! Johdanto!! Ajallinen käyttäytyminen! oteutus!
Värijärjestelmät. Väritulostuksen esittely. Tulostaminen. Värien käyttäminen. Paperinkäsittely. Huolto. Vianmääritys. Ylläpito.
 Tällä tulostimella voidaan tulostaa värillisiä asiakirjoja. Värituloste herättää huomiota, lisää arvostusta ja tulosteen tai tietojen arvoa. käyttö lisää lukijoiden määrää, sillä väritulosteet luetaan
Tällä tulostimella voidaan tulostaa värillisiä asiakirjoja. Värituloste herättää huomiota, lisää arvostusta ja tulosteen tai tietojen arvoa. käyttö lisää lukijoiden määrää, sillä väritulosteet luetaan
Canon 430EX salamaopas
 Canon 430EX salamaopas Sisällysluettelo Canon 430EX salamaopas 1 Salaman osat 2 Paristojen asennus ja salaman kiinnittäminen kameraan 3 Slave valinta 3 Salaman käynnistäminen / sammuttaminen 3 Salman toiminto
Canon 430EX salamaopas Sisällysluettelo Canon 430EX salamaopas 1 Salaman osat 2 Paristojen asennus ja salaman kiinnittäminen kameraan 3 Slave valinta 3 Salaman käynnistäminen / sammuttaminen 3 Salman toiminto
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN