Lego NXT Mindstorms -ristinollarobotti
|
|
|
- Risto Halonen
- 9 vuotta sitten
- Katselukertoja:
Transkriptio
1 Lego NXT Mindstorms -ristinollarobotti Jouko Strömmer Melissa Kasari Helsinki Java Standard Edition 6 lejos NXJ 0.7 beta Helsingin yliopisto Tietojenkäsittelytieteen laitos Robottiohjelmoinnin harjoitustyö, kevät 2009 Ohjaaja Mikko Apiola

2 Sisältö 1 Kuvaus 1 2 Pelaaminen Pelin aloittaminen Pelin kulku Pelin päättyminen Robotin rakenne Tarvittavat osat Toiminta lyhyesti Ongelmia ja ratkaisuja Kokoaminen Painikkeet Pyörät, kääntyminen Suuntaus lejosin CompassPilot-bugi Ruudukolla liikkuminen Siirron merkitseminen Ruudukon lukeminen Värisävyt Rakennusohje Runko Torni Ohjelman toiminta Luokat Robotin ohjaus Tekoäly Pelin tekoälyn toimintaperiaate Robotin toiminnot Parannettavaa 10 6 Testit 11 Liitteet Liite A: Lähdekoodin API-kuvaus Liite B: Java-lähdekoodi

3 1 Kuvaus Robotin tarkoituksena on pelata ristinollapelia ihmisvastustajan kanssa ja voittaa. Peli tapahtuu fyysisella pelilaudalla, jonka koko ja ominaisuudet voidaan ma a ritta a ohjelman alussa. Robotti kykenee lukemaan pelilaudalta ihmisen siirrot ja merkitsema a n oman siirtonsa. 2 Pelaaminen Pelaamiseen vaaditaan oikein rakennettu robotti, jonka keskusyksikko o n pita a olla asennettuna lejos1 ja peliluokka. Rakennusohje on kappaleessa 3.4. Lisa ksi robotille pita a valmistaa pelialue esimerkiksi tulostamalla 10 kappaletta ruutuja, jotka kiinniteta a n sopivalle alustalle muodostamaan ruudukko. Sopiva yhden ruudun leveys on 16 cm ja ruudut on paras tehda mustarajaisena valkoiselle pohjalle. Ihmispelaaja tarvitsee myo s oman pelimerkkinsa, ta ha n on suositeltavaa ka ytta a harmaata paperinpalasta, jonka leveys on puolet peliruudusta. Kuva 1: Esimerkki pelialueesta 2.1 Pelin aloittaminen Jotta robotti voi toimia pelissa, sen antureiden pita a olla oikein kalibroituja. Valosensori sa a deta a n ohjelman alussa na ytta ma lla sille pelissa ka ytetta va t sa vyt. Asetuksia ei tallenneta keskusyksiko n muistiin, joten sensori pita a kalibroida uudestaan kussakin ka ynnistyksessa. Jos robotin rakenne muuttuu, pita a kompassisensori kalibroida uudelleen. Ta ha n annetaan mahdollisuus ohjelman alussa. Ohjelma esitta a ruudulla ohjeen kustakin vaiheesta ja ilmoittaa kun alustus on valmis ja robotin voi asettaa alkuruutuun

4 Alustus 1. Käynnistä ohjelma ja vastaa seuraaviin kysymyksiin painikkeilla LEFT, RIGHT ja ENTER, oletusasetukset sulkeissa: ruudukon koko, 3x3-5x5 (3x3) yhden ruudun koko, cm (16 cm) tekoälyn vaikeusaste, 1-3 (2) robotin nopeus, (500) kalibroidaanko kompassisensori aloittaako ihmispelaaja 2. Paina robotin kynäteline ala-asentoon ja kiinnitä siihen kynä esimerkiksi kuminauhoilla tai nippusiteellä niin, että kynän kärki koskettaa riittävästi alustaa. Tee tämä pelialueen ja aloitusruudun ulkopuolella, ettei niihin tule robottia harhauttavia merkintöjä. 3. Paina kosketussensoria, jolloin kynäteline kääntyy ylös, valosensorin ledi syttyy ja merkkiääni soi. 4. Valosensorin kalibrointi alkaa. Näytä robotille pelin sävyt asettamalla robotti sävyn päälle ja painamalla kosketussensoria. Sävyt luetaan seuraavassa järjestyksessä: (a) kirkkain arvo ( valkoinen ) (b) tummin arvo ( musta ) (c) tyhjä ruutu (d) ruudun reuna (e) ihmisen pelimerkki Viimeisen sävyn jälkeen robotti soittaa lyhyen melodian. 5. Jos valitsit kompassin kalibroinnin: (a) Sijoita robotti niin että sillä on tilaa kääntyä ympäri ja takana oleva pallo on asetettu oikein. (b) Paina kosketussensoria, kompassin kalibrointi alkaa ja robotti pyörähtää noin kaksi kertaa ympäri ja soittaa melodian. 6. Sijoita robotti alkuruutuun, ruudukon suuntaisesti niin, että etuosa osoittaa ylöspäin ruudukolla. Tässä on hyvä olla tarkka, koska kompassin nollakulma pelialueen pystyakseli määräytyy robotin asennosta. 7. Kosketussensoria painamalla robotti aloittaa vuoronsa. Jos ihmispelaaja valittiin aloittamaan, siirto pitää tehdä ennen painamista. 2

5 2.2 Pelin kulku Kun on ihmispelaajan vuoro, kiinnitetään pelimerkki ruudukon haluttuun kohtaan esimerkiksi sinitarralla ja painetaan kosketussensoria vuoron päättymisen ilmaisemiseksi. Peli etenee vuorotellen siten, että robotti vuoronsa alussa käy ensin tutkimassa laudan tyhjiä kohtia kunnes löytää ihmisen siirron, minkä jälkeen tekee oman siirtonsa ja palaa takaisin alkuruutuun. Tämän jälkeen ihmispelaaja asettaa haluamaansa ruutuun pelimerkin ja painaa kosketussensoria merkiksi siirtonsa päättymisestä, jolloin robotti aloittaa taas vuoronsa. Robotin ensimmäisessä siirrossa kestää vähintään joitain sekunteja. Jos 4x4- lauta on valittu, vaikeusasteella 1 ensimmäisen siirron laskemiseen menee noin 50 sekuntia, 5x5-laudalla viisi minuuttia. Jos vaikeusastetta nostetaan 3:een, viettää robotti ensimmäisen siirron laskemiseen 3x3-laudalla noin puolitoista minuuttia. 2.3 Pelin päättyminen Peli päättyy, kun robotti joko tekee voittavan siirron, huomaa ihmisen voittaneen tai toteaa pelin päätyneen tasapeliin. Tuloksen joko ruudukon läpikäynnin tai oman siirtonsa seurauksena selvitettyään robotti palaa välittömästi alkuruutuun, soittaa äänen ja vilkuttaa valosensoriaan nopeasti. Robotti näyttää vielä näytöllään pelilaudan lopputilan ja voittajan. Robotin voi tässä vaiheessa asettaa takaisin alkuruutuun ja painaa kosketussensoria uuden pelin aloittamiseksi samoilla asetuksilla. Ohjelman voi sulkea painamalla yhtä aikaa ENTER ja ESCAPE -painikkeita. 3 Robotin rakenne 3.1 Tarvittavat osat Robotin rakentamiseen riittää yksi Lego Mindstorms NXT rakennussarja 2 tai vastaavat osat, sekä HiTechnic NXT Compass Sensor (NMC1034) -kompassisensori 3. Tarvittavat NXT-komponentit: 3 servomoottoria 1 valosensori 1 kosketussensori 1 kompassisensori 6 johtoa Muita tarvikkeita: paperia ja kiinnitystarpeita ruudukkoa varten pehmeä tussi tai vastaava kynä robotin käyttöön, vaihtoehtoisesti siirrot voidaan merkitä ihmisen toimesta paperinpaloilla

6 3.2 Toiminta lyhyesti Liikkuminen tapahtuu kahdella itsenäisesti pyörivällä renkaalla. Sulavaa kääntymistä varten käytetään NXT-sarjaan kuuluvaa sinistä tai punaista palloa, johon rakennelman takaosa tukeutuu. Robotti käyttää kompassia suuntansa määrittämiseen ja valosensoria pelialueen muutosten havaitsemiseen. Siirto merkitään kynällä, jonka pidikettä ohjaa kolmas moottori. 3.3 Ongelmia ja ratkaisuja Ristinollapelin toteutukseen pohdittiin monenlaisia ratkaisuja, kukin hyvillä ja huonoilla puolillaan. Autonkaltaisessa robotissa on useita liikkeeseen virheitä aiheuttavia tekijöitä, kuten renkaiden malli ja koko, rakenteen symmetrisyys, alustan materiaali, liikkumis- ja kääntymisnopeus, rakenteen lujuus, paino sekä painopiste. Koska NXT-sarjan osilla on hyvin vaikeaa tehdä riittävän suuren lineaarisen liikkeen mahdollistavia rakennelmia, päädyttiin kuitenkin toteuttamaan peliä autonkaltaisella robotilla, koska paikallaan pysyväksi rakennettuna peli ei olisi ollut mielekkään kokoinen Kokoaminen Tarpeetonta rakennusvaivaa pyrittiin välttämään ja aloitettiin pohtimalla, miten robotin voisi rakentaa NXT-keskusyksikön ympärille. Tarvittavat tukirakenteet ja osat vaikuttivat olevan helpointa sijoittaa oikeille kohdilleen kun keskusyksikkö käännettiin painikkeet alaspäin, koska palikan takapuolella on useita kiinnitysreikiä joiden päälle voidaan rakentaa. Kiinnitykset ja tukirakenteet pyrittiin valikoimaan niin, että robotti olisi helppo koota mutta liikkuisi tasaisesti. Tämä onnistuikin melko hyvin. Robotin painopiste on matalalla ja se on yksinkertainen runsaat varusteet ja tukevuusvaatimukset huomioon ottaen Painikkeet Koska keskusyksikön painikkeet ovat robotin alla, sijoitettiin kosketussensori kätevään paikkaan korvaamaan ENTERiä. Pelin aikana painiketta tarvitaan vain vuoron vaihtuessa Pyörät, kääntyminen Yksi hankala ongelma oli, että robotin pitäisi kääntyä tarkasti ja tasaisesti paitsi yleisen tarkkuuden vuoksi, myös kompassisensorin oikean toiminnan varmistamiseksi. Ensimmäinen mieleen tuleva ratkaisu oli kääntyvät takapyörät, mutta nämä osoittautuivat liian huteriksi ja kääntyminen oli nykivää. Vankin ratkaisu tuntui olevan pallomainen pyörä, joten takapyörät korvattiin yhdellä pallolla. Pallo pyörii tukikehikon alla haluttuun suuntaan ilman suurempaa vastustusta, vaikka pallon karkaamista rajoittava rakenne voisi olla hiotumpikin Suuntaus Jotta robotilla olisi jokin luotettava reaalimaailmaan pohjautuva havainto käytössään eikä jouduttaisi luottamaan yksinomaan ajotarkkuuteen, käytetään kompassisensoria robotin osoittaman suunnan määrittämiseksi. Sensorilta voidaan 4

7 lukea kompassilukema joko absoluuttisena ilmansuuntana tai haluttuun suuntaan kiinnitettynä karteesisena kulmana. Sensorin vakaa ja suora asento on tärkeää tarkkuuden kannalta, joten tämä piti ottaa huomioon muun muassa kääntymisen nopeudessa. Robotti suuntaa kohti haluttua kulmaa laskemalla kumpaan suuntaan kääntymällä päästään kohdekulmaan nopeimmin ja kääntyessään säätää moottorin nopeutta pehmeästi hitaammaksi kun kohdekulmaa lähestytään, mikä lieventää merkittävästi pysähtymisen aiheuttamaa nykäystä. Kompassin kalibrointi osoittautui tärkeäksi. Kalibroinnista on ristiriitaista tietoa: lejosin API ohjeistaa pyörittämään HiTechnic-sensoria hyvin hitaasti 1,5-2 täyttä kierrosta 4, mutta kuitenkin luokka CompassNavigator suorittaa kalibroinnin yksinkertaisesti kääntymällä pyörillä yhden täyden kierroksen nopeammin kuin API:ssa suositellaan. Toisaalta taas kompassin omassa ohjeessa neuvotaan pyöräyttämään sitä ainakin yksi vähintään kaksi sekuntia kestävä kierros. Robotti käyttää omaa kalibrointitoimintoaan, joka suorittaa kaksi kierrosta melko hitaasti. Kompassin toimintaan vaikuttaa myös moottoreiden ja keskusyksikön aiheuttama häiriö ja ohjeissa suositellaankin sijoittamaan kompassi ainakin 15 cm etäisyydelle näistä. Tämän vuoksi kompassisensori on asetettu tornimaiseen rakennelmaan robotin päälle. Tornin pitää olla riittävän tukeva, ettei kompassi heilu kääntymisen aikana lejosin CompassPilot-bugi Suuntaamiseen ja koordinaatistossa liikkumiseen kompassin avulla on sinänsä olemassa toteutus lejosissa itsessään, mutta tässä tapauksessa törmättiin ikävään bugiin: luokan CompassPilot metodi rotateto 5 jota luokka CompassNavigator käyttää ei ikinä aloita varsinaista kääntymistä, mutta asettaa moottorin tilan kääntyväksi. Tämä johtaa siihen, että moottorin regulaattorisäie viskoo moottoria edestakaisin hulvattomasti. lejosin korjaaminen olisi ollut myös vaihtoehto, mutta turhan paneutumisen välttämiseksi toteutettiin tarvittava toiminnallisuus itse Ruudukolla liikkuminen Robotin menestyksekäs peli edellyttää toki, että se pysyy pelialueen sisällä ja sijainti vastaa ohjelman sisäistä tilaa. Tämä ratkaistiin tekemällä pahvipohjalle tulosteista 3x3-ruudukko, jonka yhden ruudun leveys on 16 cm. Ruudukon viivat havaitaan lattiaa kohti osoittavalla valosensorilla. Liikkuakseen yhden ruudullisen johonkin suuntaan, robotti kääntyy siihen kompassin avulla, sitten ajaa eteenpäin kunnes on ylittänyt viivan, minkä jälkeen korjataan suuntaa ja ajetaan vielä puoli ruudullista eteenpäin. Pelialueen ulkopuolelle vasemman alareunan viereen, koordinaatteihin (-1,0) on määritelty robotin alkupiste. Alkupiste on samanlainen ruutu kuin muutkin ja tehtyään siirron robotti palaa sinne odottamaan ihmispelaajan merkkiä suoritetusta siirrosta. Reitti valitaan laskemalla etäisyys kohteeseen pysty- ja vaakasuunnassa. Robotti siirtyy ensin tarvittavan etäisyyden ruuduissa pystysuunnassa, minkä 4 CompassSensor.html#startCalibration() 5 CompassPilot.html#rotateTo(int) 5

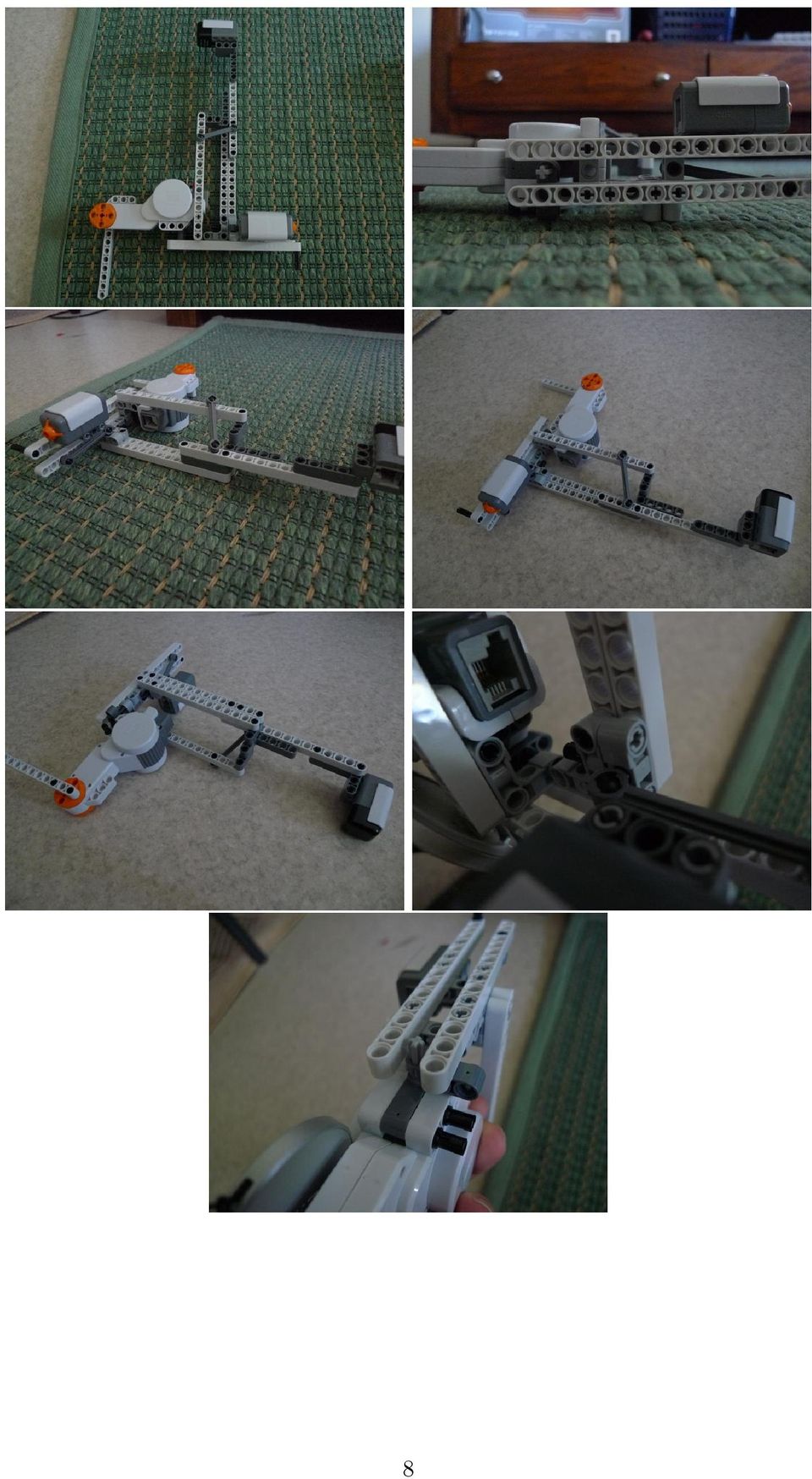
8 jälkeen suorittaa vaakasuuntaisen siirtymisen. Käytännössä tällä tavalla toimien ja valosensoria viivojen tunnistamiseen hyödyntämällä robotti korjaa omaa liikettään siirtyessään ruudusta toiseen. Tarkkuus riittää 3x3-ruudukolla pelaamiseen hyvin tiheiden käännösten vuoksi, mutta suuremmalla pelialueella voi olla tarpeen keskittää robotti tietyin välimatkoin. Paljon suurempi ruudukko vaatii kuitenkin erilaisen pelialgoritmin, koska NXT:n laskentateho ei riitä jouhevaan peliin. Ruudun keskipisteeseen pääseminen tapahtuu kääntymällä ylöspäin, ajamalla kunnes ruudun reuna tulee vastaan, peruuttamalla puoli ruutua ja tekemällä saman vasempaan päin. Näin voidaan kimmottaa robotti ruudun reunoista keskipistettä kohti. Toimintoa käytetään kun robotti on palannut alkupisteeseen ja ennen kuin se aloittaa siirtonsa merkitsemisen ruutuun Siirron merkitseminen Robotin pitää pystyä jotenkin ilmaisemaan oma siirtonsa, joten kolmas moottori ohjaa robotin etuosaan kiinnitettyä kynäpidikettä. Kun sijainti on keskitetty haluttuun ruutuun, käännetään kynä koskettamaan paperia, minkä jälkeen robotti pyörähtää täyden kierroksen ja nostaa kynän Ruudukon lukeminen Omia siirtojaan robotin ei tarvitse lukea, koska ne tiedetään jo. Ongelmaksi jääkin ihmisen siirron selvittäminen, joka on toteutettu ajamalla robotin vuorolla niihin ruutuihin, joiden sisältö on robotin muistissa merkitty tyhjäksi. Ruudut käydään läpi alhaalta ylöspäin. Kun robotti saapuu ruutuun, valosensorin arvo luetaan ja verrataan tunnettuihin sävyihin. Jos sävy on riittävän lähellä jotain tunnettua lukemaa, asetetaan sitä vastaava tila ruutuun. Jos tila oli aiemmin tyhjä, mutta nyt ruudussa havaitaan ihmisen pelimerkki, ruudukon läpikäynti lopetetaan. Ihminen merkitsee siirtonsa harmaasävyisellä, riittävän suurella, esimerkiksi 8 cm leveällä neliönmuotoisella paperinpalalla, jonka sävyn robotin valosensori voi tulkita ihmisen siirroksi. Jos ruudun tila on jokin muu kuin tyhjä, sitä ei tutkita uudestaan vaikka sen läpi kuljettaisiinkin. Robotilla kestää oletusnopeudella korkeintaan 25 sekuntia lukea koko ruudukon tila Värisävyt Selvitäkseen pelilaudalla valosensori pitää kalibroida haluttuihin sävyihin. Yksinkertaisuuden ja tulostusteknisten rajoitteiden vuoksi käytettiin mustaa ja valkoista sekä harmaan sävyä, joka erottuu näistä riittävästi. Valkoinen tarkoittaa tyhjää ruutua, musta ruudun reunaa ja harmaa ihmisen siirtoa. 3.4 Rakennusohje Robotin rakenteessa merkittävintä on kyky tasaiseen kääntymiseen ja kompassisensorin pitäminen etäällä, noin 15 cm päässä toiminnallisista osista. Tämän vuoksi robotti on matala ja kompassille on rakennettu erillinen teline. Renkaita on pyritty tukevoittamaan liittämällä moottorin ja renkaan väliin sinisiä kiinnitystappeja. 6

9 3.4.1 Runko Runko muodostuu moottoreista ja keskusyksikko a ympa ro iva sta tukirakenteesta, joka robotin takaosassa kahlitsee pallon toimimaan pyo ra na. Runko voi olla rakennettu muunkinlaiseksi, mutta la hdekoodiin on ma a ritelty ta ssa esitellyn robotin mitat: renkaan halkaisija 5,6 cm, uran leveys 16,2 cm. Todellisuudessa leveys on kenties millimetrin lyhyempi, mutta na illa parametreilla robotti tuntui ajavan parhaiten Torni Torni pita a kompassin riitta va n eta isyyden pa a ssa muista osista ha irio iden va henta miseksi. Tornin rakenne voisi olla tukevampi ja kiinnitetty eri kohtaan runkoa, mutta ta ssa esitelty toimi riitta va n hyvin ja on helppo irrottaa. Olennaista on, etta torni ei heilu ka a ntyessa ja kompassi on suorassa. Torniin kuuluu myo s kyna a liikuttava moottori ja kosketussensori. 7

10 8
11 4 Ohjelman toiminta 4.1 Luokat Ohjelman käyttämät luokat on jaettu kahteen toiminnalliseen kokonaisuuteen. Yksi hallitsee robotin liikettä ja pääohjelmaa ja toinen toteuttaa pelin tekoälyn Robotin ohjaus Auxiliary Grid RobotControl Toe Aputoimintoja käyttöliittymän toteuttamiseksi. Ruudukkoabstraktio, jonka kautta robottia ohjataan. Robotinohjausluokka, sisältää navigaation, kalibrointi- ja valosensoritoimintoja. Pelin pääohjelma, kysyy pelin parametrit, aloittaa siirrot ja tarkistuttaa voittajan Tekoäly GameTree Rules SituationScorer Luo pelipuun tilanteesta ja hakee parhaan mahdollisen siirron. Tutkii, onko peli päättynyt. Pisteyttää siirron arvon pelaajalle. 4.2 Pelin tekoälyn toimintaperiaate Tekoäly laskee lailliset siirrot haluttuun syvyyteen asti ja valitsee näistä itselleen edullisimman. Ohjelman alussa voi valita vaikeusasteen, jolloin algoritmin hakusyvyydeksi asetetaan vaikeusaste + 1. Pelitekoälyn toiminta perustuu tavalliseen Minimax-algoritmiin, jonka ideana on luoda pelipuu ja käydä läpi jokainen mahdollinen pelitilanne. Pelitilanteista valitaan paras siten, että tekoäly ottaa huomioon molempien optimaaliset siirrot. Tekoäly on toteutettu käyttäen kolmea luokkaa. Luokka GameTree luo puun ja toteuttaa Minimax-algoritmin, Rules määrittää pelin säännöt, joihin kuuluu mm. pelin päättymisen, voittajan ja luvallisten siirtojen arviointi. Luokka SituationScorer on tekoälyn kannalta tärkeä, sillä se pisteyttää siirrot. Käytännössä jokainen puun lehdestä löytyvä pelitilanne syötetään SituationScorer luokalle, joka palauttaa kyseisen tilanteen pisteytyksen robotin kannalta. Ohjelmassa on käytetty seuraavaa pisteytystä: Jos pelitilanne on voittotilanne robotille, arvo = 1000 Jos pelitilanne on voittotilanne vastustajalle, arvo = Muuten arvioidaan laudalta löytyvät kaikki suorat seuraavasti: Jos suora on valmis, arvo = 0 Jos suoralla on molempien merkkejä, eikä suoraa voi näin ollen voittaa, arvo = 0 Jos suoralla ei ole yhtään vastustajaa, arvo = 10 Jokainen oma tuo arvoa lisää +20 Jos suoralla on vain vastustajan merkkejä, arvo = -10 9

12 Jokaista seuraavaa vastustajan merkkiä kohden arvoa vähennetään -40 Pisteytys saadaan laskemalla kaikkien suorien arvot yhteen. Tällaisella pisteytyksellä pyritään luomaan tekoäly, joka osaa ennakoida paremmin vastustajan siirrot ja joka korostaa vastustajan torjuntaa. Tästä on hyötyä varsinkin jos pelilauta on suurempi kuin 3x3. Jos pelilauta on 3x3 olisi ehkä enemmän hyötyä korostaa omia siirtoja enemmän, mutta näitä arvoja on helppo muuttaa. 4.3 Robotin toiminnot Liitteenä olevassa API-kuvauksessa selitetään toiminnot tarkemmin, tässä lista tärkeimmistä: Navigointi gohome moveto movedirectlyto center movenumsquares pointto Pelitoiminnot mark examine scan printboard Sensorit calibrateshades calibrate shade palaa alkuruutuun liiku haluttuun ruutuun liiku ruutuun suorinta reittiä keskitä robotti ruutuun liiku haluttu määrä ruutuja suuntaan käännä robotti osoittamaan suuntaan merkitse siirto haluttuun ruutuun tutki yhden ruudun tila tutki koko ruudukon tila tulosta ruudukon tila näytölle kalibroi valosensoriin käytettävät sävyt kalibroi kompassi tunnista robotin alla oleva sävy 5 Parannettavaa Robotti ei kulje optimaalista reittiä tutkiessaan ruudukkoa. Ruudukon läpikäynnissä noudatetaan yksinkertaista kaavaa, joka käy joka toisen rivin ruudut läpi eri suuntaan. Tämä johtaa siihen, että jos esimerkiksi keskirivin kaikki ruudut ovat täynnä, robotti on päässyt skannauksessa oikeaan alakulmaan ja seuraava skannattava ruutu sijaitsisi vasemmassa yläkulmassa, robotti suorittaa pystysuuntaisen siirtymän yläriville, mutta sitten siirtyy ylärivin vasemmanpuolimmaiseen ruutuun, josta lähtee käymään rivin läpi. Robotti olisi tässä voinut lukea rivin tehokkaammin aloittaen oikealta. Isommalla kuin 3x3-ruudukolla voi olla tarpeen joko muuttaa liikkumiskoodia tai keskittää robottia ruutuun aika ajoin, jotta robotti ei ajautuisi pitkän matkan aikana liikaa vinoon. 10

13 Kompassi voisi olla kiinnitetty tukevammin. Jäi myös hieman askarruttamaan, oliko tornin korkeus riittävä vai aiheutuiko moottoreista kompassiin oleellista häiriötä. Tornille voisi keksiä paremman korvaajan. Liike tapahtuu aina askelissa, mikä näyttää tökkivältä. Siirtymistä voisi tehdä pehmeämmäksi laskemalla nopeutta hieman ja korjaamalla suuntaa ajon aikana eikä pysähtymällä hetkeksi tekemään sitä ruudun reunalle. Nykyisellään ruutujen pitää olla neliön muotoisia. Tämän voisi muuttaa säädettäväksi niin että robotti voi pelata sopivilla lattialaatoilla tai muulla alustalla. Suurempiin pelialueisiin tarvittaisiin tehokkaampi pelialgoritmi. Pelissä on hieman nuivat ja epäinformatiiviset äänet, joita voisi parantaa. Äänisensoria voitaisiin käyttää kosketussensorin sijaan ilmaisemaan siirron päättymistä, jotta robotti tuntuisi luonnollisemmalta pelikaverilta. Kynäpidike voisi olla hienostuneempi tai koko merkintätapa korvattu paremmalla. Testaus jäi puutteelliseksi ja koodi mitä todennäköisimmin sisältää joitain virheitä. Tasapeliin johtavaa tilannetta ei tunnisteta ennen kuin ruudukko on täyttynyt, vaikka pattitilanteet voitaisiin päätellä. 6 Testit Robottia on testattu pienissä määrin 3x3-ruudukolla ja se on tunnistanut oikein omat ja ihmisen voitot sekä tasapelit. Järjestelmällistä koodin testausta ei ole suoritettu. 11

Antitammirobotti. Antti Meriläinen Martin Pärtel 29. toukokuuta 2009
 Antitammirobotti Antti Meriläinen Martin Pärtel 29. toukokuuta 2009 Helsingin yliopisto Tietojenkäsittelytieteen laitos Robottiohjelmoinnin harjoitustyö
Antitammirobotti Antti Meriläinen Martin Pärtel 29. toukokuuta 2009 Helsingin yliopisto Tietojenkäsittelytieteen laitos Robottiohjelmoinnin harjoitustyö
Ohjeet ovat työn alla ja kirjaan niitä päivittäen ja edes takaisin lukien pari viikkoa.
 ( 1 ) Hannu Särön lautapelien ohjeita pelaajille - ( 1 ) - Sisältö. ( 2 ) - Jätkänshakki. ( 3 ) - Reversi. ( 4 ) - Tammi. ( 5 ) - Mylly. ( 6 ) - Shakki. ( 7 ) - Shakki, uudet napit ja uudet laudat. Ohjeet
( 1 ) Hannu Särön lautapelien ohjeita pelaajille - ( 1 ) - Sisältö. ( 2 ) - Jätkänshakki. ( 3 ) - Reversi. ( 4 ) - Tammi. ( 5 ) - Mylly. ( 6 ) - Shakki. ( 7 ) - Shakki, uudet napit ja uudet laudat. Ohjeet
SUMO-ROBOTTI. Tehtävä
 SUMO-ROBOTTI Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla yksinkertainen Sumorobotti. Robotti ohjelmoidaan liikkumaan autonomisesti (ilman ohjausta) ja tunnistamaan mustan ottelualustan
SUMO-ROBOTTI Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla yksinkertainen Sumorobotti. Robotti ohjelmoidaan liikkumaan autonomisesti (ilman ohjausta) ja tunnistamaan mustan ottelualustan
HiTechnic -kompassisensorin käyttäminen NXT-G -ympäristössä
 NXT -kompassisensori NXT -roboteihin on saatavilla kahdenlaisia kompasseja: Wiltronics kompassit (tilaukset: http://www.wiltronics.com.au/) ja HiTechnic kompassit (NMC1034 Compass) (tilaukset: http://www.hitechnic.com/products).
NXT -kompassisensori NXT -roboteihin on saatavilla kahdenlaisia kompasseja: Wiltronics kompassit (tilaukset: http://www.wiltronics.com.au/) ja HiTechnic kompassit (NMC1034 Compass) (tilaukset: http://www.hitechnic.com/products).
Pelaajat siirtävät nappuloitaan vastakkaisiin suuntiin pelilaudalla. Peli alkaa näin. Tuplauskuutio asetetaan yhtä kauas kummastakin pelaajasta.
 DVD Backgammon Pelin tavoite Pelin tavoitteena on siirtää kaikki omat pelinappulat omalle sisäkentälle ja sieltä pois laudalta. Se pelaaja, joka ensimmäisenä on poistanut kaikki pelinappulansa pelilaudalta,
DVD Backgammon Pelin tavoite Pelin tavoitteena on siirtää kaikki omat pelinappulat omalle sisäkentälle ja sieltä pois laudalta. Se pelaaja, joka ensimmäisenä on poistanut kaikki pelinappulansa pelilaudalta,
TIEA343 - Robottiohjelmointi 2011
 Samuli Rahkonen 6.7.2011 TIEA343 - Robottiohjelmointi 2011 Tämä on Jyväskylän yliopistossa järjestetyn robottiohjelmointikurssin harjoitustyön dokumentaatio. Robotin tarkoitus Robotin tarkoitus on ampua
Samuli Rahkonen 6.7.2011 TIEA343 - Robottiohjelmointi 2011 Tämä on Jyväskylän yliopistossa järjestetyn robottiohjelmointikurssin harjoitustyön dokumentaatio. Robotin tarkoitus Robotin tarkoitus on ampua
Puzzle SM 2005 15. 25.7.2005. Pistelasku
 Puzzle SM 005 5. 5.7.005 Pistelasku Jokaisesta oikein ratkotusta tehtävästä saa yhden () pisteen, minkä lisäksi saa yhden () bonuspisteen jokaisesta muusta ratkojasta, joka ei ole osannut ratkoa tehtävää.
Puzzle SM 005 5. 5.7.005 Pistelasku Jokaisesta oikein ratkotusta tehtävästä saa yhden () pisteen, minkä lisäksi saa yhden () bonuspisteen jokaisesta muusta ratkojasta, joka ei ole osannut ratkoa tehtävää.
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS ROBOTIIKKA TEKOÄLYN GRAND CHALLENGE YHDISTÄÄ LÄHES KAIKKI TEKOÄLYN OSA-ALUEET: ROBOTIIKKA TEKOÄLYN GRAND CHALLENGE YHDISTÄÄ LÄHES KAIKKI TEKOÄLYN OSA-ALUEET: AKTUAATTORIT:
JOHDATUS TEKOÄLYYN TEEMU ROOS ROBOTIIKKA TEKOÄLYN GRAND CHALLENGE YHDISTÄÄ LÄHES KAIKKI TEKOÄLYN OSA-ALUEET: ROBOTIIKKA TEKOÄLYN GRAND CHALLENGE YHDISTÄÄ LÄHES KAIKKI TEKOÄLYN OSA-ALUEET: AKTUAATTORIT:
Ohjeissa pyydetään toisinaan katsomaan koodia esimerkkiprojekteista (esim. Liikkuva_Tausta1). Saat esimerkkiprojektit opettajalta.
. Saat esimerkkiprojektit opettajalta.") Ohjeissa pyydetään toisinaan katsomaan koodia esimerkkiprojekteista (esim. Liikkuva_Tausta1). Saat esimerkkiprojektit opettajalta. Vastauksia kysymyksiin Miten hahmon saa hyppäämään? Yksinkertaisen hypyn
Ohjeissa pyydetään toisinaan katsomaan koodia esimerkkiprojekteista (esim. Liikkuva_Tausta1). Saat esimerkkiprojektit opettajalta. Vastauksia kysymyksiin Miten hahmon saa hyppäämään? Yksinkertaisen hypyn
Tasohyppelypeli. Piirrä grafiikat. Toteuta pelihahmon putoaminen ja alustalle jääminen:
 Tasohyppelypeli 1 Pelissä ohjaat liikkuvaa ja hyppivää hahmoa vaihtelevanmuotoisessa maastossa tavoitteenasi päästä maaliin. Mallipelinä Yhden levelin tasohyppely, tekijänä Antonbury Piirrä grafiikat Pelaajan
Tasohyppelypeli 1 Pelissä ohjaat liikkuvaa ja hyppivää hahmoa vaihtelevanmuotoisessa maastossa tavoitteenasi päästä maaliin. Mallipelinä Yhden levelin tasohyppely, tekijänä Antonbury Piirrä grafiikat Pelaajan
Pyramidin yleiset säännöt
 Pyramidin yleiset säännöt 1. Biljardivälineet ja tarvikkeet Seuraavassa kuvattuihin pyramidi -pelin versioiden pelaamiseen tarvittavat välineet ovat biljardipöytä, pallot sekä apuvälineet (mm. resti).
Pyramidin yleiset säännöt 1. Biljardivälineet ja tarvikkeet Seuraavassa kuvattuihin pyramidi -pelin versioiden pelaamiseen tarvittavat välineet ovat biljardipöytä, pallot sekä apuvälineet (mm. resti).
Scratch ohjeita. Perusteet
 Perusteet Scratch ohjeita Scratch on graafinen ohjelmointiympäristö koodauksen opetteluun. Se soveltuu hyvin alakouluista yläkouluunkin asti, sillä Scratchin käyttömahdollisuudet ovat monipuoliset. Scratch
Perusteet Scratch ohjeita Scratch on graafinen ohjelmointiympäristö koodauksen opetteluun. Se soveltuu hyvin alakouluista yläkouluunkin asti, sillä Scratchin käyttömahdollisuudet ovat monipuoliset. Scratch
SÄÄNNÖT. Language: English / Suomi
 Rules of Coerceo by Coerceo Company Finnish translation by Janne Henriksson SÄÄNNÖT Language: English / Suomi Tekijänoikeus Mitään tämän dokumentin osaa ei saa jäljentää, kopioida tai välittää missään
Rules of Coerceo by Coerceo Company Finnish translation by Janne Henriksson SÄÄNNÖT Language: English / Suomi Tekijänoikeus Mitään tämän dokumentin osaa ei saa jäljentää, kopioida tai välittää missään
Äänellä vauhtia robottiin
 Äänellä vauhtia robottiin Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla robotti, joka väistää esteitä ja kulkee sitä nopeampaa mitä kovempi ääni sen lähistöllä on. Robotti tunnistaa esteet
Äänellä vauhtia robottiin Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla robotti, joka väistää esteitä ja kulkee sitä nopeampaa mitä kovempi ääni sen lähistöllä on. Robotti tunnistaa esteet
Johdatus go-peliin. 25. joulukuuta 2011
 Johdatus go-peliin 25. joulukuuta 2011 Tämän dokumentin tarkoitus on toimia johdatuksena go-lautapeliin. Lähestymistapamme poikkeaa tavallisista go-johdatuksista, koska tässä dokumentissa neuvotaan ensin
Johdatus go-peliin 25. joulukuuta 2011 Tämän dokumentin tarkoitus on toimia johdatuksena go-lautapeliin. Lähestymistapamme poikkeaa tavallisista go-johdatuksista, koska tässä dokumentissa neuvotaan ensin
Lego Mindstorms NXT robottien etenemissuunnitelma
 Lego Mindstorms NXT robottien etenemissuunnitelma Ohjelmointi on yleisesti koettu luokanopettajien keskuudessa erääksi merkittävimmiksi uudistuksiksi, joita OPS 2016 tarjoaa. Tässä oppaassa on meidän koulumme
Lego Mindstorms NXT robottien etenemissuunnitelma Ohjelmointi on yleisesti koettu luokanopettajien keskuudessa erääksi merkittävimmiksi uudistuksiksi, joita OPS 2016 tarjoaa. Tässä oppaassa on meidän koulumme
Avaruuden muoto. Kuvaus: Tehtävässä pohditaan avaruuden muotoa ja pelataan ristinollaa erilaisilla pinnoilla.
 Avaruuden muoto Avainsanat: torus, Kleinin pullo, topologia Luokkataso: 6.-9. luokka, lukio Välineet: kyniä, pelilaudat (liitteenä) Kuvaus: Tehtävässä pohditaan avaruuden muotoa ja pelataan ristinollaa
Avaruuden muoto Avainsanat: torus, Kleinin pullo, topologia Luokkataso: 6.-9. luokka, lukio Välineet: kyniä, pelilaudat (liitteenä) Kuvaus: Tehtävässä pohditaan avaruuden muotoa ja pelataan ristinollaa
A* Reitinhaku Aloittelijoille
 A* Reitinhaku Aloittelijoille Alkuperäisen artikkelin kirjoittanut Patrick Lester, suomentanut Antti Veräjänkorva. Suom. huom. Tätä kääntäessäni olen pyrkinyt pitämään saman alkuperäisen tyylin ja kerronnan.
A* Reitinhaku Aloittelijoille Alkuperäisen artikkelin kirjoittanut Patrick Lester, suomentanut Antti Veräjänkorva. Suom. huom. Tätä kääntäessäni olen pyrkinyt pitämään saman alkuperäisen tyylin ja kerronnan.
SAC RDS Futurline MAX Tupla-robotin ohjeet näytteenottoon ja päivämaidon lähetykseen
 RDS - ohjeet 1 (18) SAC RDS Futurline MAX Tupla-robotin ohjeet näytteenottoon ja päivämaidon lähetykseen Näytteenoton aloittaminen Shuttlen säädöt robotilla Telineen vaihto Näytteenoton lopettaminen Näyteraportin
RDS - ohjeet 1 (18) SAC RDS Futurline MAX Tupla-robotin ohjeet näytteenottoon ja päivämaidon lähetykseen Näytteenoton aloittaminen Shuttlen säädöt robotilla Telineen vaihto Näytteenoton lopettaminen Näyteraportin
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS ROBOTIIKKA TEKOÄLYN GRAND CHALLENGE YHDISTÄÄ LÄHES KAIKKI TEKOÄLYN OSA-ALUEET: ROBOTIIKKA TEKOÄLYN GRAND CHALLENGE YHDISTÄÄ LÄHES KAIKKI TEKOÄLYN OSA-ALUEET: AIVOT : + KONENÄKÖ
JOHDATUS TEKOÄLYYN TEEMU ROOS ROBOTIIKKA TEKOÄLYN GRAND CHALLENGE YHDISTÄÄ LÄHES KAIKKI TEKOÄLYN OSA-ALUEET: ROBOTIIKKA TEKOÄLYN GRAND CHALLENGE YHDISTÄÄ LÄHES KAIKKI TEKOÄLYN OSA-ALUEET: AIVOT : + KONENÄKÖ
KOKO PERHEEN HAUSKA STRATEGIAPELI OHJEET
 KOKO PERHEEN HAUSKA STRATEGIAPELI OHJEET ROBOGEM_Ohjevihko_148x210mm.indd 1 PELIN TAVOITE Robotit laskeutuvat kaukaiselle planeetalle etsimään timantteja, joista saavat lisää virtaa aluksiinsa. Ohjelmoi
KOKO PERHEEN HAUSKA STRATEGIAPELI OHJEET ROBOGEM_Ohjevihko_148x210mm.indd 1 PELIN TAVOITE Robotit laskeutuvat kaukaiselle planeetalle etsimään timantteja, joista saavat lisää virtaa aluksiinsa. Ohjelmoi
Lego Mindstorms NXT. OPH oppimisympäristöjen kehittämishanke 2011-2013. (C) 2012 Oppimiskeskus Innokas! All Rights Reserved 1
 2012 Oppimiskeskus Innokas! All Rights Reserved 1") Lego Mindstorms NXT OPH oppimisympäristöjen kehittämishanke 2011-2013 (C) 2012 Oppimiskeskus Innokas! All Rights Reserved 1 Anturi- ja moottoriportit A B C 1 2 3 4 (C) 2012 Oppimiskeskus Innokas! All Rights
Lego Mindstorms NXT OPH oppimisympäristöjen kehittämishanke 2011-2013 (C) 2012 Oppimiskeskus Innokas! All Rights Reserved 1 Anturi- ja moottoriportit A B C 1 2 3 4 (C) 2012 Oppimiskeskus Innokas! All Rights
Impedanssitomografia-peli
 Impedanssitomografia-peli Avainsanat: inversio-ongelmat, päättely, satunnaisuus Luokkataso: 3.-5. luokka, 6.-9. luokka, lukio, yliopisto Välineet: kynä, paperia, 2 pelinappulaa, 4 kolikkoa tai kolikonheittokortit
Impedanssitomografia-peli Avainsanat: inversio-ongelmat, päättely, satunnaisuus Luokkataso: 3.-5. luokka, 6.-9. luokka, lukio, yliopisto Välineet: kynä, paperia, 2 pelinappulaa, 4 kolikkoa tai kolikonheittokortit
PELIAIKASEURANTAOHJELMAN KÄYTTÖOHJE
 PELIAIKASEURANTAOHJELMAN KÄYTTÖOHJE SISÄLLYSLUETTELO 1. YLEISTÄ 2. ENNEN OTTELUN ALKUA Kirjautuminen 3. TILASTOINTI Näkymän muokkaus Kokoonpanot Pelaajien vaihtaminen Maali Rangaistukset Poista -toiminto
PELIAIKASEURANTAOHJELMAN KÄYTTÖOHJE SISÄLLYSLUETTELO 1. YLEISTÄ 2. ENNEN OTTELUN ALKUA Kirjautuminen 3. TILASTOINTI Näkymän muokkaus Kokoonpanot Pelaajien vaihtaminen Maali Rangaistukset Poista -toiminto
Kenguru 2013 Cadet (8. ja 9. luokka)
") sivu 1 / 12 3 pistettä 1. Annalla on neliöistä koostuva ruutupaperiarkki. Hän leikkaa paperista ruutujen viivoja pitkin mahdollisimman monta oikeanpuoleisessa kuvassa näkyvää kuviota. Kuinka monta ruutua
sivu 1 / 12 3 pistettä 1. Annalla on neliöistä koostuva ruutupaperiarkki. Hän leikkaa paperista ruutujen viivoja pitkin mahdollisimman monta oikeanpuoleisessa kuvassa näkyvää kuviota. Kuinka monta ruutua
LUMATE-tiedekerhokerta, suunnitelma AIHE: PELIT JA TAKTIIKAT
 LUMATE-tiedekerhokerta, suunnitelma AIHE: PELIT JA TAKTIIKAT 1. Alkupohdintaa Mitä lempipelejä oppilailla on? Ovatko ne pohjimmiltaan matemaattisia? (laskeminen, todennäköisyys ) Mitä taktiikoita esimerkiksi
LUMATE-tiedekerhokerta, suunnitelma AIHE: PELIT JA TAKTIIKAT 1. Alkupohdintaa Mitä lempipelejä oppilailla on? Ovatko ne pohjimmiltaan matemaattisia? (laskeminen, todennäköisyys ) Mitä taktiikoita esimerkiksi
Puzzle-SM 2000. Loppukilpailu 18.6.2000 Oulu
 Puzzle-SM Loppukilpailu 8.6. Oulu Puzzle Ratkontaaikaa tunti Ratkontaaikaa tunti tsi palat 6 Varjokuva 7 Parinmuodostus 7 Paikallista 7 Metris 7 ominopalapeli Kerrostalot Pisteestä toiseen Heinäsirkka
Puzzle-SM Loppukilpailu 8.6. Oulu Puzzle Ratkontaaikaa tunti Ratkontaaikaa tunti tsi palat 6 Varjokuva 7 Parinmuodostus 7 Paikallista 7 Metris 7 ominopalapeli Kerrostalot Pisteestä toiseen Heinäsirkka
1/6 TEKNIIKKA JA LIIKENNE FYSIIKAN LABORATORIO V1.31 9.2011
 1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
Avainsanat: peli, matematiikka, polynomi, yhteen- ja vähennyslasku, kertolasku
 Pasi Leppäniemi OuLUMA, sivu 1 POLYNOMIPELI Avainsanat: peli, matematiikka, polynomi, yhteen- ja vähennyslasku, kertolasku Luokkataso: 8-9 lk Välineet: pelilauta, polynomikortit, monomikortit, tuloskortit,
Pasi Leppäniemi OuLUMA, sivu 1 POLYNOMIPELI Avainsanat: peli, matematiikka, polynomi, yhteen- ja vähennyslasku, kertolasku Luokkataso: 8-9 lk Välineet: pelilauta, polynomikortit, monomikortit, tuloskortit,
PELIAIKASEURANTAOHJELMAN KÄYTTÖOHJE
 PELIAIKASEURANTAOHJELMAN KÄYTTÖOHJE SISÄLLYSLUETTELO 1. YLEISTÄ 3 2. ENNEN OTTELUN ALKUA Kirjautuminen 3 3. TILASTOINTI Aloitusnäkymä ja kokoonpanot 4 Pelaajien vaihtaminen 6 Maali 7 Rangaistukset 8 Poista
PELIAIKASEURANTAOHJELMAN KÄYTTÖOHJE SISÄLLYSLUETTELO 1. YLEISTÄ 3 2. ENNEN OTTELUN ALKUA Kirjautuminen 3 3. TILASTOINTI Aloitusnäkymä ja kokoonpanot 4 Pelaajien vaihtaminen 6 Maali 7 Rangaistukset 8 Poista
Tarvikkeet: A5-kokoisia papereita, valmiiksi piirrettyjä yksinkertaisia kuvioita, kyniä
 LUMATE-tiedekerhokerta, suunnitelma AIHE: OHJELMOINTI 1. Alkupohdinta: Mitä ohjelmointi on? Keskustellaan siitä, mitä ohjelmointi on (käskyjen antamista tietokoneelle). Miten käskyjen antaminen tietokoneelle
LUMATE-tiedekerhokerta, suunnitelma AIHE: OHJELMOINTI 1. Alkupohdinta: Mitä ohjelmointi on? Keskustellaan siitä, mitä ohjelmointi on (käskyjen antamista tietokoneelle). Miten käskyjen antaminen tietokoneelle
NXT Infrapuna-sensori
 NXT Infrapuna-sensori Joissakin tilanteissa on hyödyllistä, jos robotti tunnistaa ympäristöstä tulevaa infrapunavaloa. Tämä tieto on välttämätön esim. RCJ:n robottijalkapallossa. Tässä esitellään vain
NXT Infrapuna-sensori Joissakin tilanteissa on hyödyllistä, jos robotti tunnistaa ympäristöstä tulevaa infrapunavaloa. Tämä tieto on välttämätön esim. RCJ:n robottijalkapallossa. Tässä esitellään vain
Merkkijono on palindromi, jos se säilyy samana, vaikka sen kääntää väärinpäin.
 A Palindromi Sinulle annetaan merkkijono, ja tehtäväsi on poistaa siitä tarkalleen yksi merkki, minkä jälkeen merkkijonon tulisi olla palindromi. Onko tehtäväsi mahdollinen? Merkkijono on palindromi, jos
A Palindromi Sinulle annetaan merkkijono, ja tehtäväsi on poistaa siitä tarkalleen yksi merkki, minkä jälkeen merkkijonon tulisi olla palindromi. Onko tehtäväsi mahdollinen? Merkkijono on palindromi, jos
Kärkipallo sijoitetaan alapisteelle, ja muut pallot sen taakse kiinni toisiinsa.
 (Nämä säännöt ovat lyhennelmä virallisesta sääntökirjasta). Yleiset säännöt 1.1 PÖYTÄ Ennen pelin aloittamista pöytä merkitään seuraavasti: 1. Yläpiste 4. Alapiste 2. Ylälinja 5. Pakan paikka (3. Keskipiste)
(Nämä säännöt ovat lyhennelmä virallisesta sääntökirjasta). Yleiset säännöt 1.1 PÖYTÄ Ennen pelin aloittamista pöytä merkitään seuraavasti: 1. Yläpiste 4. Alapiste 2. Ylälinja 5. Pakan paikka (3. Keskipiste)
PROBYTE kallistusnäyttöautomatiikka
 PROBYTE kallistusnäyttöautomatiikka 1 Toimintaperiaate PROBYTE kallistusnäyttöautomatiikka on tarkoitettu puoliautomaattiseksi tiekoneiden kallistuskulmamittariksi. Laite ohjaa käyttäjää äänimerkeillä
PROBYTE kallistusnäyttöautomatiikka 1 Toimintaperiaate PROBYTE kallistusnäyttöautomatiikka on tarkoitettu puoliautomaattiseksi tiekoneiden kallistuskulmamittariksi. Laite ohjaa käyttäjää äänimerkeillä
1 PÖYDÄT JA PALLOT 1. Kilpailuissa tulee käyttää Suomen Biljardiliiton hyväksymiä pöytiä ja palloja.
 KARAMBOLEN SÄÄNNÖT Kolmen vallin kara Yhden vallin kara Suora kara - Cadre YHTEISET SÄÄNNÖT KAIKILLE PELIMUODOILLE 1 PÖYDÄT JA PALLOT 1. Kilpailuissa tulee käyttää Suomen Biljardiliiton hyväksymiä pöytiä
KARAMBOLEN SÄÄNNÖT Kolmen vallin kara Yhden vallin kara Suora kara - Cadre YHTEISET SÄÄNNÖT KAIKILLE PELIMUODOILLE 1 PÖYDÄT JA PALLOT 1. Kilpailuissa tulee käyttää Suomen Biljardiliiton hyväksymiä pöytiä
Pelivaihtoehtoja. Enemmän vaihtelua peliin saa käyttämällä erikoislaattoja. Jännittävimmillään Alfapet on, kun miinusruudut ovat mukana pelissä!
 Pelivaihtoehtoja Yksinkertaisin vaihtoehto: lfapetia voi pelata monella eri tavalla. Yksinkertaisimmassa vaihtoehdossa käytetään ainoastaan kirjainlaattoja. Pelilaudan miinusruudut ovat tavallisia ruutuja,
Pelivaihtoehtoja Yksinkertaisin vaihtoehto: lfapetia voi pelata monella eri tavalla. Yksinkertaisimmassa vaihtoehdossa käytetään ainoastaan kirjainlaattoja. Pelilaudan miinusruudut ovat tavallisia ruutuja,
Matinteko (1 / 10) Matinteko (2 / 10) Helpointa matin tekeminen on kahdella raskaalla upseerilla (esim. kuningattarella ja tornilla).
 Matinteko (2 / 10) Helpointa matin tekeminen on kahdella raskaalla upseerilla (esim. kuningattarella ja tornilla).") Shakkinappuloiden voimasuhteet Matinteko (1 / 10) Kuningas on pelin tärkein nappula, ilman kuningasta peli on hävitty. 1. Kuningas + Daami + Torni vs Kuningas Matinteko (2 / 10) Helpointa matin tekeminen
Shakkinappuloiden voimasuhteet Matinteko (1 / 10) Kuningas on pelin tärkein nappula, ilman kuningasta peli on hävitty. 1. Kuningas + Daami + Torni vs Kuningas Matinteko (2 / 10) Helpointa matin tekeminen
Datatähti 2009 -alkukilpailu
 Datatähti 2009 -alkukilpailu Ohjelmointitehtävä 1/3: Hissimatka HUOM: Tutustuthan huolellisesti tehtävien sääntöihin ja palautusohjeisiin (sivu 7) Joukko ohjelmoijia on talon pohjakerroksessa, ja he haluavat
Datatähti 2009 -alkukilpailu Ohjelmointitehtävä 1/3: Hissimatka HUOM: Tutustuthan huolellisesti tehtävien sääntöihin ja palautusohjeisiin (sivu 7) Joukko ohjelmoijia on talon pohjakerroksessa, ja he haluavat
Muumion kirous. Pelisuunnitteludokumentti. Veikkauksen pelisuunnittelukilpailua (Peliskaba2015) varten
 varten") Pelisuunnitteludokumentti Muumion kirous Veikkauksen pelisuunnittelukilpailua (Peliskaba2015) varten Tekijä: Esko Vankka Osoite: Yliopistonkatu 39 E 51, 33500 Tampere Puh: 0400 832 907 Email: esko.pj.vankka@gmail.com
Pelisuunnitteludokumentti Muumion kirous Veikkauksen pelisuunnittelukilpailua (Peliskaba2015) varten Tekijä: Esko Vankka Osoite: Yliopistonkatu 39 E 51, 33500 Tampere Puh: 0400 832 907 Email: esko.pj.vankka@gmail.com
2.1 Yksinkertaisen geometrian luonti
 2.1 Yksinkertaisen geometrian luonti Kuva 2.1 Tiedon portaat Kuva 2.2 Ohjelman käyttöliittymä suoran luonnissa 1. Valitse Luo, Suora, Luo suora päätepistein. 2. Valitse Pystysuora 3. Valitse Origo Origon
2.1 Yksinkertaisen geometrian luonti Kuva 2.1 Tiedon portaat Kuva 2.2 Ohjelman käyttöliittymä suoran luonnissa 1. Valitse Luo, Suora, Luo suora päätepistein. 2. Valitse Pystysuora 3. Valitse Origo Origon
Tämän monisteen tarkoitus on tutustua pikamaski -toimintoon GIMP:issä.
 Gimp alkeet XVII 9 luokan ATK-työt/HaJa Sivu 1 / 5 Tutustuminen pikamaskiin Tämän monisteen tarkoitus on tutustua pikamaski -toimintoon GIMP:issä. Pikamaski on tehokas keino rajata alueita ja copypasteta
Gimp alkeet XVII 9 luokan ATK-työt/HaJa Sivu 1 / 5 Tutustuminen pikamaskiin Tämän monisteen tarkoitus on tutustua pikamaski -toimintoon GIMP:issä. Pikamaski on tehokas keino rajata alueita ja copypasteta
VIRUSKAAPPARI-PELI - KURKISTUS OHJELMOINNILLISEEN AJATTELUUN
 VIRUSKAAPPARI-PELI - KURKISTUS OHJELMOINNILLISEEN AJATTELUUN Tämä teos on lisensoitu Creative Commons CC BY 4.0 Kansainvälinen -käyttöluvalla. Tarkastele käyttölupaa osoitteessa http://creativecommons.org/licenses/by/4.0/.
VIRUSKAAPPARI-PELI - KURKISTUS OHJELMOINNILLISEEN AJATTELUUN Tämä teos on lisensoitu Creative Commons CC BY 4.0 Kansainvälinen -käyttöluvalla. Tarkastele käyttölupaa osoitteessa http://creativecommons.org/licenses/by/4.0/.
Säännöt. Pelivalmistelut
 Haasteet Haasteet 1. Lusikka kuppiin 2. Posse Pong 3. Räkäpallo 4. Syömäpuikkohaaste 5. hamsteriposket 6. Lattian kautta kuppiin 7. Korttipalapeli 8. Lajitteluhaaste 9. Pingis ristinolla 10. Lusikkaflipperi
Haasteet Haasteet 1. Lusikka kuppiin 2. Posse Pong 3. Räkäpallo 4. Syömäpuikkohaaste 5. hamsteriposket 6. Lattian kautta kuppiin 7. Korttipalapeli 8. Lajitteluhaaste 9. Pingis ristinolla 10. Lusikkaflipperi
Eye Pal Solo. Käyttöohje
 Eye Pal Solo Käyttöohje 1 Eye Pal Solon käyttöönotto Eye Pal Solon pakkauksessa tulee kolme osaa: 1. Peruslaite, joka toimii varsinaisena lukijana ja jonka etureunassa on laitteen ohjainpainikkeet. 2.
Eye Pal Solo Käyttöohje 1 Eye Pal Solon käyttöönotto Eye Pal Solon pakkauksessa tulee kolme osaa: 1. Peruslaite, joka toimii varsinaisena lukijana ja jonka etureunassa on laitteen ohjainpainikkeet. 2.
Kenguru 2013 Cadet (8. ja 9. luokka)
") sivu 1 / 7 NIMI LUOKKA Pisteet: Kenguruloikan pituus: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto. Väärästä vastauksesta saat miinuspisteitä
sivu 1 / 7 NIMI LUOKKA Pisteet: Kenguruloikan pituus: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto. Väärästä vastauksesta saat miinuspisteitä
P6SLite ohjaus- ja zoom komennot
 1, Ohjaus zoom -toiminnot P6SLite ohjaus- ja zoom komennot Osa 1 pikanäppäintoiminnon Valitse APP-käyttöliittymää ja APP ilmestyy toimintopainikkeeseen. Paina + = ZOOM +, paina - = ZOOM-. 2, Manuaalinen
1, Ohjaus zoom -toiminnot P6SLite ohjaus- ja zoom komennot Osa 1 pikanäppäintoiminnon Valitse APP-käyttöliittymää ja APP ilmestyy toimintopainikkeeseen. Paina + = ZOOM +, paina - = ZOOM-. 2, Manuaalinen
http://www.nelostuote.fi/suomi/rummikubsaan.html
 Sivu 1/5 Pelin sisältö 104 numeroitua laattaa (numeroitu 1-13) 2 laattaa kutakin neljää väriä (musta, oranssi, sininen ja punainen) 2 jokerilaattaa, 4 laattatelinettä, pelisäännöt Pelin tavoite Tavoitteena
Sivu 1/5 Pelin sisältö 104 numeroitua laattaa (numeroitu 1-13) 2 laattaa kutakin neljää väriä (musta, oranssi, sininen ja punainen) 2 jokerilaattaa, 4 laattatelinettä, pelisäännöt Pelin tavoite Tavoitteena
KÄYTTÖOHJE ELTRIP-R6. puh. 08-6121 651 fax 08-6130 874 www.trippi.fi seppo.rasanen@trippi.fi. PL 163 87101 Kajaani
 KÄYTTÖOHJE ELTRIP-R6 PL 163 87101 Kajaani puh. 08-6121 651 fax 08-6130 874 www.trippi.fi seppo.rasanen@trippi.fi SISÄLLYSLUETTELO 1. TEKNISIÄ TIETOJA 2. ELTRIP-R6:n ASENNUS 2.1. Mittarin asennus 2.2. Anturi-
KÄYTTÖOHJE ELTRIP-R6 PL 163 87101 Kajaani puh. 08-6121 651 fax 08-6130 874 www.trippi.fi seppo.rasanen@trippi.fi SISÄLLYSLUETTELO 1. TEKNISIÄ TIETOJA 2. ELTRIP-R6:n ASENNUS 2.1. Mittarin asennus 2.2. Anturi-
Pong-peli, vaihe Koordinaatistosta. Muilla kielillä: English Suomi. Tämä on Pong-pelin tutoriaalin osa 2/7. Tämän vaiheen aikana
 Muilla kielillä: English Suomi Pong-peli, vaihe 2 Tämä on Pong-pelin tutoriaalin osa 2/7. Tämän vaiheen aikana Laitetaan pallo liikkeelle Tehdään kentälle reunat Vaihdetaan kentän taustaväri Zoomataan
Muilla kielillä: English Suomi Pong-peli, vaihe 2 Tämä on Pong-pelin tutoriaalin osa 2/7. Tämän vaiheen aikana Laitetaan pallo liikkeelle Tehdään kentälle reunat Vaihdetaan kentän taustaväri Zoomataan
dametric AGS-anturi HUOLTOKÄSIKIRJA AGS-XXX Service Manual FI.docx Lokakuu 12, 2010 / BL Sivu 1 (8)
") dametric AGS-anturi AGS-XXX Service Manual FI.docx Lokakuu 12, 2010 / BL Sivu 1 (8) Sisältö 1 Yleistä... 2 2 Anturin asennus ja poisto... 3 3 Kotelon ja putken välinen liitos... 4 4 Kärjen ja kotelon välinen
dametric AGS-anturi AGS-XXX Service Manual FI.docx Lokakuu 12, 2010 / BL Sivu 1 (8) Sisältö 1 Yleistä... 2 2 Anturin asennus ja poisto... 3 3 Kotelon ja putken välinen liitos... 4 4 Kärjen ja kotelon välinen
- 4 aloituslaattaa pelaajien väreissä molemmille puolille on kuvattu vesialtaat, joista lähtee eri määrä akvedukteja.
 AQUA ROMANA Vesi oli elintärkeä ja keskeinen edellytys Rooman imperiumin kehitykselle. Vedensaannin turvaamiseksi taitavimmat rakennusmestarit rakensivat valtavan pitkiä akvedukteja, joita pidetään antiikin
AQUA ROMANA Vesi oli elintärkeä ja keskeinen edellytys Rooman imperiumin kehitykselle. Vedensaannin turvaamiseksi taitavimmat rakennusmestarit rakensivat valtavan pitkiä akvedukteja, joita pidetään antiikin
Sukelluskeräily, Pelihahmon liikuttaminen. Tee uusi hahmo: Pelihahmo. Nimeä se. Testaa ikuisesti -silmukassa peräkkäisinä testeinä (jos) onko jokin
 onko jokin") Versio 1.0 1 Sukelluskeräily Tässä pelissä keräilet erilaisia aarteita ja väistelet vihollista. Tämän lisäksi pelaajan pitää käydä välillä pinnalla hengittelemässä. Peliin lisätään myös häiriötekijäksi
Versio 1.0 1 Sukelluskeräily Tässä pelissä keräilet erilaisia aarteita ja väistelet vihollista. Tämän lisäksi pelaajan pitää käydä välillä pinnalla hengittelemässä. Peliin lisätään myös häiriötekijäksi
Pong-peli, vaihe Aliohjelman tekeminen. Muilla kielillä: English Suomi. Tämä on Pong-pelin tutoriaalin osa 3/7. Tämän vaiheen aikana
 Muilla kielillä: English Suomi Pong-peli, vaihe 3 Tämä on Pong-pelin tutoriaalin osa 3/7. Tämän vaiheen aikana Jaetaan ohjelma pienempiin palasiin (aliohjelmiin) Lisätään peliin maila (jota ei voi vielä
Muilla kielillä: English Suomi Pong-peli, vaihe 3 Tämä on Pong-pelin tutoriaalin osa 3/7. Tämän vaiheen aikana Jaetaan ohjelma pienempiin palasiin (aliohjelmiin) Lisätään peliin maila (jota ei voi vielä
Program matopeli; uses graph,grafiikka,crt; VAR. merkkiluettu,herkkutarkistettu : boolean;
 {Matopeli} {Yksinkertainen TurboPascalilla ohjelmoitu matopeli} {Julkaistu GPLv3 lisenssillã } {https://www.gnu.org/licenses/gpl-3.0.html} {Ilari Kuoppala 9D} Program matopeli; uses graph,grafiikka,crt;
{Matopeli} {Yksinkertainen TurboPascalilla ohjelmoitu matopeli} {Julkaistu GPLv3 lisenssillã } {https://www.gnu.org/licenses/gpl-3.0.html} {Ilari Kuoppala 9D} Program matopeli; uses graph,grafiikka,crt;
Ajotaitomerkkisäännöt matkailuautolle voimaan 1.1.2012
 Ajotaitomerkkisäännöt matkailuautolle voimaan..202 Tarkoitus on saada jokainen karavaanari kiinnostumaan ajotaitonsa kehittämisestä oman ajoneuvonsa käsittelyssä. On tärkeää, että mahdollisimman moni kokee
Ajotaitomerkkisäännöt matkailuautolle voimaan..202 Tarkoitus on saada jokainen karavaanari kiinnostumaan ajotaitonsa kehittämisestä oman ajoneuvonsa käsittelyssä. On tärkeää, että mahdollisimman moni kokee
Ratkaiseva päätöskierros
 Nuoli pysähtyy lippukortin kohdalle: Pelaaja, joka pyöräytti nuolta katsoo lippukorttiaan ja päättää mikä maanosa on kyseessä kierroksen aikana (Eurooppa, Etelä-merikka, Pohjois-merikka, frikka, asia vai
Nuoli pysähtyy lippukortin kohdalle: Pelaaja, joka pyöräytti nuolta katsoo lippukorttiaan ja päättää mikä maanosa on kyseessä kierroksen aikana (Eurooppa, Etelä-merikka, Pohjois-merikka, frikka, asia vai
Uolevin reitti. Kuvaus. Syöte (stdin) Tuloste (stdout) Esimerkki 1. Esimerkki 2
 Tuloste (stdout) Esimerkki 1. Esimerkki 2") Uolevin reitti Kuvaus Uolevi on ruudukon vasemmassa ylänurkassa ja haluaisi päästä oikeaan alanurkkaan. Uolevi voi liikkua joka askeleella ruudun verran vasemmalle, oikealle, ylöspäin tai alaspäin. Lisäksi
Uolevin reitti Kuvaus Uolevi on ruudukon vasemmassa ylänurkassa ja haluaisi päästä oikeaan alanurkkaan. Uolevi voi liikkua joka askeleella ruudun verran vasemmalle, oikealle, ylöspäin tai alaspäin. Lisäksi
Messilä Golfin paikallissäännöt
 Messilä Golfin paikallissäännöt Messilän kentän paikallissäännöt sisältävät toistaiseksi voimassa olevat paikallissäännöt LIITE 1 - Pelialueen rajat ja merkinnät - Etäisyysmittarin käyttö - Kentän polut/tiet
Messilä Golfin paikallissäännöt Messilän kentän paikallissäännöt sisältävät toistaiseksi voimassa olevat paikallissäännöt LIITE 1 - Pelialueen rajat ja merkinnät - Etäisyysmittarin käyttö - Kentän polut/tiet
Kenguru 2011 Cadet RATKAISUT (8. ja 9. luokka)
") sivu / 2 IKET VSTUSVIHTEHDT N LLEVIIVTTU. 3 pistettä. Minkä laskun tulos on suurin? () 20 (B) 20 (C) 20 (D) + 20 (E) : 20 20 20, 20, 20 20 20 202 ( suurin ) ja : 20 0,0005 2. Hamsteri Fridolin suuntaa
sivu / 2 IKET VSTUSVIHTEHDT N LLEVIIVTTU. 3 pistettä. Minkä laskun tulos on suurin? () 20 (B) 20 (C) 20 (D) + 20 (E) : 20 20 20, 20, 20 20 20 202 ( suurin ) ja : 20 0,0005 2. Hamsteri Fridolin suuntaa
Käyttöönotto-opas RT Controller
 Käyttöönotto-opas RT Controller Pikaopas RT-järjestelmän käyttöönottoa varten Aloitusopas RT Controller Versio 1.3 (090831) (Käytä tämän pikaoppaan kanssa opasta User Manual RT Controller, versio 2.1 tai
Käyttöönotto-opas RT Controller Pikaopas RT-järjestelmän käyttöönottoa varten Aloitusopas RT Controller Versio 1.3 (090831) (Käytä tämän pikaoppaan kanssa opasta User Manual RT Controller, versio 2.1 tai
Garmin GPSmap 60CSx -laite
 Garmin GPSmap 60CSx -laite GPS koulutus 20.6.2007 PAIKKATIETOPAJA -hanke Näppäimet ja laitteen osat Power - virta päälle/pois, taustavalon säätö Keinunäppäin valitse vaihtoehtoja / kenttiä, syötä tietoja,
Garmin GPSmap 60CSx -laite GPS koulutus 20.6.2007 PAIKKATIETOPAJA -hanke Näppäimet ja laitteen osat Power - virta päälle/pois, taustavalon säätö Keinunäppäin valitse vaihtoehtoja / kenttiä, syötä tietoja,
Alkeispelastuksen sa a nno t 2015 2015-01-13
 Alkeispelastuksen sa a nno t 2015 2015-01-13 Oleelliset muutokset vuoden 2014 sa a nto ihin: 1.5 Hidasteet osa on päivitetty. 2.3 Rakentaminen osa on pa ivitetty. Muita muutoksia ei ole. Johdanto Alue
Alkeispelastuksen sa a nno t 2015 2015-01-13 Oleelliset muutokset vuoden 2014 sa a nto ihin: 1.5 Hidasteet osa on päivitetty. 2.3 Rakentaminen osa on pa ivitetty. Muita muutoksia ei ole. Johdanto Alue
Sisällysluettelo. 1. Johdanto
 Säännöt Sisällysluettelo 1. Johdanto 3 2. Sisältö 4 3. Alkuvalmistelut 5 4. Pelin aloitus ja kulku 6 5. Pelin lopetus 9 6. Vaikea peli ja muut pelimuunnelmat 10 1. Johdanto Pelilauta on 25 ruudusta muodostuva
Säännöt Sisällysluettelo 1. Johdanto 3 2. Sisältö 4 3. Alkuvalmistelut 5 4. Pelin aloitus ja kulku 6 5. Pelin lopetus 9 6. Vaikea peli ja muut pelimuunnelmat 10 1. Johdanto Pelilauta on 25 ruudusta muodostuva
Asennusohje SureStep PUR, SafeStep, SafeStep Grip & SafeStep R12
 Kaikkein paraskaan lattiapäällyste ei ole hyvännäköinen tai toimiva, jos sitä ei asenneta ja hoideta oikein tai jos alusta ei ole ihanteellinen. Lue tämän vuoksi asennusohje huolellisesti, ennen kuin aloitat
Kaikkein paraskaan lattiapäällyste ei ole hyvännäköinen tai toimiva, jos sitä ei asenneta ja hoideta oikein tai jos alusta ei ole ihanteellinen. Lue tämän vuoksi asennusohje huolellisesti, ennen kuin aloitat
VIISIPALLO PELI JOKA KEHITTÄÄ YHTENÄISYYTTÄ YHTEISTYÖTÄ YHTEISÖÄ
 VIISIPALLO PELI JOKA KEHITTÄÄ YHTENÄISYYTTÄ YHTEISTYÖTÄ YHTEISÖÄ LYHYESTI VIISIPALLOSTA Viisipallo muistuttaa pohjimmiltaan paljon polttopalloa: Siinä on sisäjoukkue ja ulkojoukkue. Sisäjoukkue lyö pallon
VIISIPALLO PELI JOKA KEHITTÄÄ YHTENÄISYYTTÄ YHTEISTYÖTÄ YHTEISÖÄ LYHYESTI VIISIPALLOSTA Viisipallo muistuttaa pohjimmiltaan paljon polttopalloa: Siinä on sisäjoukkue ja ulkojoukkue. Sisäjoukkue lyö pallon
Pro 57 UM/S Setelilaskuri
 Pro 57 UM/S Setelilaskuri Turvallisuusohjeet ja huoltoa koskevat säännökset Lue tämä käyttöohje ennen laitteen käyttöönottoa Laite pitää asentaa tasaiselle vaakasuoralle alustalle, pois vedestä ja vaarallisia
Pro 57 UM/S Setelilaskuri Turvallisuusohjeet ja huoltoa koskevat säännökset Lue tämä käyttöohje ennen laitteen käyttöönottoa Laite pitää asentaa tasaiselle vaakasuoralle alustalle, pois vedestä ja vaarallisia
N S. ta tai m ä. BLÄUER 2003 www.kasityo.com versio 1.0
 N S ta tai m ä BLÄUER 2003 www.kasityo.com versio 1.0 ONNISTUNUT SALKKU Salkkuja on eri kokoisia, muotoisia ja värisiä. Huomiota kiinnitetään seuraaviin kohtiin. SALKUN AUKAISEMINEN PYÖRÖSAHALLA JA SEN
N S ta tai m ä BLÄUER 2003 www.kasityo.com versio 1.0 ONNISTUNUT SALKKU Salkkuja on eri kokoisia, muotoisia ja värisiä. Huomiota kiinnitetään seuraaviin kohtiin. SALKUN AUKAISEMINEN PYÖRÖSAHALLA JA SEN
KAUKOVALVONTAOHJELMA CARELAY CONTROL WPREMOTE
 KAUKOVALVONTAOHJELMA CARELAY CONTROL WPREMOTE Tämä kuvaus on tarkoitettu Carelay - tuotteen Waterpumps WP:n ja Power Factor::n sovelluskohteisiin. Yleistä Carelay Control Wpremote on kaukovalvontaohjelma,
KAUKOVALVONTAOHJELMA CARELAY CONTROL WPREMOTE Tämä kuvaus on tarkoitettu Carelay - tuotteen Waterpumps WP:n ja Power Factor::n sovelluskohteisiin. Yleistä Carelay Control Wpremote on kaukovalvontaohjelma,
Sinulle on annettu bittijono, ja tehtäväsi on muuttaa jonoa niin, että jokainen bitti on 0.
 A Bittien nollaus Sinulle on annettu bittijono, ja tehtäväsi on muuttaa jonoa niin, että jokainen bitti on 0. Saat käyttää seuraavia operaatioita: muuta jokin bitti vastakkaiseksi (0 1 tai 1 0) muuta kaikki
A Bittien nollaus Sinulle on annettu bittijono, ja tehtäväsi on muuttaa jonoa niin, että jokainen bitti on 0. Saat käyttää seuraavia operaatioita: muuta jokin bitti vastakkaiseksi (0 1 tai 1 0) muuta kaikki
Tutustu. Innostu. Luo! www.villihelmi.fi. 2013 VilliHelmi Oy
 1 Yhteen rannekoruun tarvitset: Erilaisia tsekkiläisiä lasihelmiä 30-60g tai 80-120 kpl siemenhelmiä (jos teet pitkiä, varrellisia kukkalinkkejä) isolenkkistä ketjua tasapäisiä korupiikkejä (pituus helmien
1 Yhteen rannekoruun tarvitset: Erilaisia tsekkiläisiä lasihelmiä 30-60g tai 80-120 kpl siemenhelmiä (jos teet pitkiä, varrellisia kukkalinkkejä) isolenkkistä ketjua tasapäisiä korupiikkejä (pituus helmien
Peilaus pisteen ja suoran suhteen Pythonin Turtle moduulilla
 Peilaus pisteen ja suoran suhteen Pythonin Turtle moduulilla ALKUHARJOITUS Kynän ja paperin avulla peilaaminen koordinaatistossa a) Peilaa pisteen (0,0) suhteen koordinaatistossa sijaitseva - neliö, jonka
Peilaus pisteen ja suoran suhteen Pythonin Turtle moduulilla ALKUHARJOITUS Kynän ja paperin avulla peilaaminen koordinaatistossa a) Peilaa pisteen (0,0) suhteen koordinaatistossa sijaitseva - neliö, jonka
... 5 ... 5 ... 5 ... 6 ... 7 ... 8 ... 8 ... 9 ... 11 ... 12
 BILJARDI 2 3 SISÄLLYSLUETTELO 1. YLEISTÄ... 5 1.1 KOLMIO/ 9-KEHIKKO... 5 2. PELIN ALOITUS... 5 3. LYÖNTIVUORON VAIHTO... 5 4. VIRHELYÖNNIT... 6 4.1 ERILAISET VIRHEET... 6 4.2 RANGAISTUS VIRHEESTÄ... 7
BILJARDI 2 3 SISÄLLYSLUETTELO 1. YLEISTÄ... 5 1.1 KOLMIO/ 9-KEHIKKO... 5 2. PELIN ALOITUS... 5 3. LYÖNTIVUORON VAIHTO... 5 4. VIRHELYÖNNIT... 6 4.1 ERILAISET VIRHEET... 6 4.2 RANGAISTUS VIRHEESTÄ... 7
Lego Mindstorms NXT robottien etenemissuunnitelma
 Lego Mindstorms NXT robottien etenemissuunnitelma Ohjelmointi on yleisesti koettu luokanopettajien keskuudessa erääksi merkittävimmiksi uudistuksiksi, joita OPS 2016 tarjoaa. Tässä oppaassa on meidän koulumme
Lego Mindstorms NXT robottien etenemissuunnitelma Ohjelmointi on yleisesti koettu luokanopettajien keskuudessa erääksi merkittävimmiksi uudistuksiksi, joita OPS 2016 tarjoaa. Tässä oppaassa on meidän koulumme
Kenguru 2011 Cadet (8. ja 9. luokka)
") sivu 1 / 7 NIMI LUOKKA/RYHMÄ Pisteet: Kenguruloikan pituus: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto. Jätä ruutu tyhjäksi, jos et halua
sivu 1 / 7 NIMI LUOKKA/RYHMÄ Pisteet: Kenguruloikan pituus: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto. Jätä ruutu tyhjäksi, jos et halua
Sukelluskeräily. Pelihahmon liikuttaminen. Aarre ja pisteet
 Sukelluskeräily 1 Tässä pelissä keräilet erilaisia aarteita ja väistelet vihollista. Tämän lisäksi pelaajan pitää käydä välillä pinnalla hengittelemässä. Peliin lisätään myös häiriötekijäksi esim. parvi
Sukelluskeräily 1 Tässä pelissä keräilet erilaisia aarteita ja väistelet vihollista. Tämän lisäksi pelaajan pitää käydä välillä pinnalla hengittelemässä. Peliin lisätään myös häiriötekijäksi esim. parvi
Kenguru 2012 Junior sivu 1 / 8 (lukion 1. vuosi)
") Kenguru 2012 Junior sivu 1 / 8 Nimi Ryhmä Pisteet: Kenguruloikan pituus: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto. Väärästä vastauksesta
Kenguru 2012 Junior sivu 1 / 8 Nimi Ryhmä Pisteet: Kenguruloikan pituus: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto. Väärästä vastauksesta
Asuinalue (ruskea tausta) Kalatori Viljatori
 Kalatori Viljatori") Carcassonne Die Stadt Pelin osat: 70 muuria 2 lyhyttä muuria (käytetään portin vieressä silloin kun tavallinen muuri olisi liian pitkä) 12 tornia 1 portti 32 asukasta - 4 eri väriä 2 kangaspussia kaupunkilaattojen
Carcassonne Die Stadt Pelin osat: 70 muuria 2 lyhyttä muuria (käytetään portin vieressä silloin kun tavallinen muuri olisi liian pitkä) 12 tornia 1 portti 32 asukasta - 4 eri väriä 2 kangaspussia kaupunkilaattojen
1 Asentaminen. 2 Yleistä ja simuloinnin aloitus 12/2006 1.1.1
 1 Asentaminen...2 2 Yleistä ja simuloinnin aloitus...2 2.1 PI-säätimet...3 2.2 Trendit...4 3 Lämpölaitoksen ohjaus...5 4 Voimalan alkuarvojen muuttaminen...6 5 Tulostus...8 6 Mahdollisia ongelmia...8 6.1
1 Asentaminen...2 2 Yleistä ja simuloinnin aloitus...2 2.1 PI-säätimet...3 2.2 Trendit...4 3 Lämpölaitoksen ohjaus...5 4 Voimalan alkuarvojen muuttaminen...6 5 Tulostus...8 6 Mahdollisia ongelmia...8 6.1
Kenguru 2019 Mini-Ecolier 2. ja 3. luokka
 Sivu 0 / 7 NIMI LUOKKA Pisteet: Kenguruloikan pituus: Koodi: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto. Oikeasta vastauksesta saa 3, 4 tai
Sivu 0 / 7 NIMI LUOKKA Pisteet: Kenguruloikan pituus: Koodi: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto. Oikeasta vastauksesta saa 3, 4 tai
250 arkin vakiolokeron täyttäminen
 Pikaopas Paperin ja erikoismateriaalin lisääminen Tässä osassa kerrotaan, miten 250 ja 550 arkin lokerot sekä käsinsyöttölokero täytetään.lisäksi siinä on tietoja Paperikoko- ja Paperilaji-asetuksista.
Pikaopas Paperin ja erikoismateriaalin lisääminen Tässä osassa kerrotaan, miten 250 ja 550 arkin lokerot sekä käsinsyöttölokero täytetään.lisäksi siinä on tietoja Paperikoko- ja Paperilaji-asetuksista.
FOCUS 650 KÄYTTÖOHJE
 FOCUS 650 KÄYTTÖOHJE Oikeus teknisiin muutoksiin pidätetään Z oom työtelineet ovat paljon enemmän kuin pelkkä työteline. Telineen kiinniytspaloja voidaan liikuttaa portaattomasti pöytäurissa ja pöydän
FOCUS 650 KÄYTTÖOHJE Oikeus teknisiin muutoksiin pidätetään Z oom työtelineet ovat paljon enemmän kuin pelkkä työteline. Telineen kiinniytspaloja voidaan liikuttaa portaattomasti pöytäurissa ja pöydän
VSP webmail palvelun ka yttö öhje
 VSP webmail palvelun ka yttö öhje Kirjaudu webmailiin osoitteessa https://webmail.net.vsp.fi Webmailin kirjautumissivu, kirjoita sähköpostiosoitteesi ja salasanasi: Sähköpostin päänäkymä: 1: Kansiolistaus
VSP webmail palvelun ka yttö öhje Kirjaudu webmailiin osoitteessa https://webmail.net.vsp.fi Webmailin kirjautumissivu, kirjoita sähköpostiosoitteesi ja salasanasi: Sähköpostin päänäkymä: 1: Kansiolistaus
Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto.
 Sivu 0 / 9 NIMI LUOKKA Pisteet: Kenguruloikan pituus: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto. Oikeasta vastauksesta saa 3, 4 tai 5 pistettä.
Sivu 0 / 9 NIMI LUOKKA Pisteet: Kenguruloikan pituus: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto. Oikeasta vastauksesta saa 3, 4 tai 5 pistettä.
OMATOIMIKAUDEN HARJOITUSOHJELMA HARJOITUS 1. OHJEITA OMATOIMIKAUDELLE:
 OMATOIMIKAUDEN HARJOITUSOHJELMA OHJEITA OMATOIMIKAUDELLE: Harjoittele omatoimikauden aikana omia kehityskohteitasi tavoitteesi mukaisesti ja tee joukkueen omatoimiharjoitukset. Suunnittele viikon harjoittelu
OMATOIMIKAUDEN HARJOITUSOHJELMA OHJEITA OMATOIMIKAUDELLE: Harjoittele omatoimikauden aikana omia kehityskohteitasi tavoitteesi mukaisesti ja tee joukkueen omatoimiharjoitukset. Suunnittele viikon harjoittelu
AKTIVOI KESKIVARTALO. Keskivartalolihasten hallinta ja vahvistaminen Opas yläkouluikäisten tyttöjen lentopallovalmentajille
 AKTIVOI KESKIVARTALO Keskivartalolihasten hallinta ja vahvistaminen Opas yläkouluikäisten tyttöjen lentopallovalmentajille VALMENTAJALLE Lentopallo vaatii pelaajalta monipuolista kehonhallintaa ja vakautta.
AKTIVOI KESKIVARTALO Keskivartalolihasten hallinta ja vahvistaminen Opas yläkouluikäisten tyttöjen lentopallovalmentajille VALMENTAJALLE Lentopallo vaatii pelaajalta monipuolista kehonhallintaa ja vakautta.
Luku 6. Dynaaminen ohjelmointi. 6.1 Funktion muisti
 Luku 6 Dynaaminen ohjelmointi Dynaamisessa ohjelmoinnissa on ideana jakaa ongelman ratkaisu pienempiin osaongelmiin, jotka voidaan ratkaista toisistaan riippumattomasti. Jokaisen osaongelman ratkaisu tallennetaan
Luku 6 Dynaaminen ohjelmointi Dynaamisessa ohjelmoinnissa on ideana jakaa ongelman ratkaisu pienempiin osaongelmiin, jotka voidaan ratkaista toisistaan riippumattomasti. Jokaisen osaongelman ratkaisu tallennetaan
Oliosuunnitteluesimerkki: Yrityksen palkanlaskentajärjestelmä
 Oliosuunnitteluesimerkki: Yrityksen palkanlaskentajärjestelmä Matti Luukkainen 10.12.2009 Tässä esitetty esimerkki on mukaelma ja lyhennelmä Robert Martinin kirjasta Agile and Iterative Development löytyvästä
Oliosuunnitteluesimerkki: Yrityksen palkanlaskentajärjestelmä Matti Luukkainen 10.12.2009 Tässä esitetty esimerkki on mukaelma ja lyhennelmä Robert Martinin kirjasta Agile and Iterative Development löytyvästä
Kohdissa 2 ja 3 jos lukujen valintaan on useita vaihtoehtoja, valitaan sellaiset luvut, jotka ovat mahdollisimman lähellä listan alkua.
 A Lista Aikaraja: 1 s Uolevi sai käsiinsä listan kokonaislukuja. Hän päätti laskea listan luvuista yhden luvun käyttäen seuraavaa algoritmia: 1. Jos listalla on vain yksi luku, pysäytä algoritmi. 2. Jos
A Lista Aikaraja: 1 s Uolevi sai käsiinsä listan kokonaislukuja. Hän päätti laskea listan luvuista yhden luvun käyttäen seuraavaa algoritmia: 1. Jos listalla on vain yksi luku, pysäytä algoritmi. 2. Jos
ASENNUSOHJEET. Moduleo - lukkopontilliset vinyylilattiat. Ruukinkuja 2, 02330 ESPOO 09 260660 orientoccident.fi
 ASENNUSOHJEET Moduleo - lukkopontilliset vinyylilattiat Ruukinkuja 2, 02330 ESPOO 09 260660 orientoccident.fi SISÄLLYS Yleistä... 2 Vastaanotto ja säilytys... 2 Tasaannuttaminen... 3 Asennusolosuhteet...
ASENNUSOHJEET Moduleo - lukkopontilliset vinyylilattiat Ruukinkuja 2, 02330 ESPOO 09 260660 orientoccident.fi SISÄLLYS Yleistä... 2 Vastaanotto ja säilytys... 2 Tasaannuttaminen... 3 Asennusolosuhteet...
Valmistelut: Aseta kartiot numerojärjestykseen pienimmästä suurimpaan (alkeisopiskelu) tai sekalaiseen järjestykseen (pidemmälle edenneet oppilaat).
 tai sekalaiseen järjestykseen (pidemmälle edenneet oppilaat).") Laske kymmeneen Tavoite: Oppilaat osaavat laskea yhdestä kymmeneen ja kymmenestä yhteen. Osallistujamäärä: Vähintään 10 oppilasta kartioita, joissa on numerot yhdestä kymmeneen. (Käytä 0-numeroidun kartion
Laske kymmeneen Tavoite: Oppilaat osaavat laskea yhdestä kymmeneen ja kymmenestä yhteen. Osallistujamäärä: Vähintään 10 oppilasta kartioita, joissa on numerot yhdestä kymmeneen. (Käytä 0-numeroidun kartion
Todettu kokeissa FCC:n standardien mukaiseksi. Yhdysvalloissa saatu patentti 7 199 792.
 Todettu kokeissa FCC:n standardien mukaiseksi. Yhdysvalloissa saatu patentti 7 199 792. Onnea uuden hankinnan johdosta 2 3 Pakkauksen sisältö Perustoiminnot A. RollerMouse Free2 B. Integroitu rannetuki
Todettu kokeissa FCC:n standardien mukaiseksi. Yhdysvalloissa saatu patentti 7 199 792. Onnea uuden hankinnan johdosta 2 3 Pakkauksen sisältö Perustoiminnot A. RollerMouse Free2 B. Integroitu rannetuki
Kenguru 2019 Mini-Ecolier 2. ja 3. luokka Ratkaisut Sivu 0 / 11
 Sivu 0 / 11 3 pistettä TEHTÄVÄ 1 2 3 4 5 6 VASTAUS D C E C A C 4 pistettä TEHTÄVÄ 7 8 9 10 11 12 VASTAUS E B A E B D 5 pistettä TEHTÄVÄ 13 14 15 16 17 18 VASTAUS D A D B D D Kilpailu pidetään aikaisintaan
Sivu 0 / 11 3 pistettä TEHTÄVÄ 1 2 3 4 5 6 VASTAUS D C E C A C 4 pistettä TEHTÄVÄ 7 8 9 10 11 12 VASTAUS E B A E B D 5 pistettä TEHTÄVÄ 13 14 15 16 17 18 VASTAUS D A D B D D Kilpailu pidetään aikaisintaan
Lue ohjeet huolellisesti ennen laitteen käyttöä.
 1 Valokuvien, diojen ja filminegatiivien skannaus ION PICS 2 PC Lue ohjeet huolellisesti ennen laitteen käyttöä. ION PICS 2 PC skannerilla voit skannata valokuvia, dioja ja filminegatiiveja tietokoneelle
1 Valokuvien, diojen ja filminegatiivien skannaus ION PICS 2 PC Lue ohjeet huolellisesti ennen laitteen käyttöä. ION PICS 2 PC skannerilla voit skannata valokuvia, dioja ja filminegatiiveja tietokoneelle
Jahtipaikat.fi Käyttöohje
 Jahtipaikat.fi Käyttöohje versio 2.0 Sisällysluettelo 1. Kirjautuminen...3 2. Näyttöruudun osat...3 3. Kartta-alusta...4 4. Kartan sisällön määrittely...4 5. Työkalut...5 5.1 Keskitä kartta koko Suomeen...5
Jahtipaikat.fi Käyttöohje versio 2.0 Sisällysluettelo 1. Kirjautuminen...3 2. Näyttöruudun osat...3 3. Kartta-alusta...4 4. Kartan sisällön määrittely...4 5. Työkalut...5 5.1 Keskitä kartta koko Suomeen...5
Ympäristöpeli Kipinä. Ympäristöpeli Kipinä on saatavilla sähköisenä osoitteessa: www.kierratyskeskus.fi/vety/julkaisut
 Ympäristöpeli Kipinä Ympäristöpeli Kipinä on kevyt ja hauska tapa käsitellä ympäristötietoa. Se on suunnattu aikuisille, ja siinä on kahdeksan perusteemaa. Pelin kortteihin voivat tarttua ihan tavalliset
Ympäristöpeli Kipinä Ympäristöpeli Kipinä on kevyt ja hauska tapa käsitellä ympäristötietoa. Se on suunnattu aikuisille, ja siinä on kahdeksan perusteemaa. Pelin kortteihin voivat tarttua ihan tavalliset
GOLFIN ETIKETTI 1. Mitä on golfpelin henki? a) Pelaan omaa peliäni välittämättä muista pelikavereista. b) Olen oman pelini tuomari
 Pelaan omaa peliäni välittämättä muista pelikavereista. b) Olen oman pelini tuomari") GOLFIN ETIKETTI 1 Mitä on golfpelin henki? a) Pelaan omaa peliäni välittämättä muista pelikavereista b) Olen oman pelini tuomari c)huomioin toiset pelaajat Oikea vastaus B ja C GOLFIN ETIKETTI 2 Mitä seuraavista
GOLFIN ETIKETTI 1 Mitä on golfpelin henki? a) Pelaan omaa peliäni välittämättä muista pelikavereista b) Olen oman pelini tuomari c)huomioin toiset pelaajat Oikea vastaus B ja C GOLFIN ETIKETTI 2 Mitä seuraavista
Z O K E R OHJEET REGLER PÅ SVENSKA XL 3 XL 3 M4 1 L4 1 XL 3 M 23 XL 1 XL 4 ML 4 M 41 L4 3 L 1 S4 1 XL 2 XL 1 2 1 M 14 M 4 XL 3 LS 4 XL 3 L 3 S L3
 X3 X X X X X X X X 3 3 3 X X 3 X X 3X 3 3 3 X 3 3 X 3 X 3 X X X X X 3 3 3 3 3 3 X 3 3 X X X 3 X X X 3 3 REGER PÅ VENK 3 www.zoker.org/se/regler X X X X X X X 3 X X 3 3 X X X 3 3 3 X 3 X X 3 3 3 3 3 3 3
X3 X X X X X X X X 3 3 3 X X 3 X X 3X 3 3 3 X 3 3 X 3 X 3 X X X X X 3 3 3 3 3 3 X 3 3 X X X 3 X X X 3 3 REGER PÅ VENK 3 www.zoker.org/se/regler X X X X X X X 3 X X 3 3 X X X 3 3 3 X 3 X X 3 3 3 3 3 3 3
Soveltuvuustutkimus Lifebelt-ohjelman ideologian käytettävyydestä olioorientoituneeseen
 Soveltuvuustutkimus Lifebelt-ohjelman ideologian käytettävyydestä olioorientoituneeseen ohjelmointiin Jukka Talvitie Valvoja: Professori Jorma Jormakka Paikka: TietoEnator oyj Ongelma Ideologia Lifebelt
Soveltuvuustutkimus Lifebelt-ohjelman ideologian käytettävyydestä olioorientoituneeseen ohjelmointiin Jukka Talvitie Valvoja: Professori Jorma Jormakka Paikka: TietoEnator oyj Ongelma Ideologia Lifebelt
Muodonmuutostila hum 30.8.13
 Muodonmuutostila Tarkastellaan kuvan 1 kappaletta Ω, jonka pisteet siirtvät ulkoisen kuormituksen johdosta siten, että siirtmien tapahduttua ne muodostavat kappaleen Ω'. Esimerkiksi piste A siirt asemaan
Muodonmuutostila Tarkastellaan kuvan 1 kappaletta Ω, jonka pisteet siirtvät ulkoisen kuormituksen johdosta siten, että siirtmien tapahduttua ne muodostavat kappaleen Ω'. Esimerkiksi piste A siirt asemaan