Mikrokontrollerikitit - loppuraportti
|
|
|
- Marjut Olivia Lahtinen
- 9 vuotta sitten
- Katselukertoja:
Transkriptio
1 Mikrokontrollerikitit - loppuraportti AS Automaatio- ja systeemitekniikan projektityöt Aihe: S13-04 Design and assembly of microcontroller kits Työn laajuus: 5 op Hannu Leppinen 78673R, AUT, [email protected] Petri Niemelä , AUT, [email protected] Markus Peltola 84765H, AUT, [email protected] Työn valvojat: Mika Strömman, Konsta Hölttä
2 Työn kuvaus Projektityön tarkoituksena oli koota mikrokontrollerikittejä, jotka mahdollistavat erilaisten sensorien ja toimilaitteiden helpon ja nopean kytkemisen Teensy-mikrokontrolleriin. Projektityön alussa kitteihin oli olemassa alustavat suunnitelmat ja jonkin verran hankittuja komponentteja. Projektityön puitteissa suunniteltiin ja valmistettiin piirilevyt ja kolvattiin niihin komponentit, sekä toteutettiin kolme kittejä käyttävää demoa. Työn lopputulos Työn lopputuloksena saatiin aikaiseksi 4 kpl valmista mikrokontrollerikittiä. Lisäksi saatiin aikaan dokumentaatio, joka mahdollistaa kittien käyttämisen opetuksessa sekä lisäkittien rakentamisen. Kittejä on mahdollista rakentaa ylijääneistä osista vielä 1-2 kappaletta. Työn kulku Työ käynnistyi tammikuussa 2013 suunnittelemalla aikataulua sekä tutkimalla Konsta Höltältä saatuja suunnitelmia. III periodin aikana päätettiin toteuttaa piirilevysuunnittelu, ja varsinainen kittien valmistus jäisi IV periodiin. III periodille haluttiin vähemmän kuormitusta aikatauluongelmien vuoksi. III periodissa aikataulussa päästiin jopa edelle, sillä ensimmäiset prototyypit olivat jo kurssin väliraporttiin mennessä valmiita. Loppuraporttiin mennessä kitit olivat valmiita, mutta dokumentaatio ja käyttöohje oli vielä viimeistelyä vailla. Toteutunut aikataulu Projektin suunnitellussa aikataulussa pysyttiin melko hyvin. Väliraporttiin mennessä oli jo saatu valmiiksi prototyyppiversiot kitin piirilevyistä. Lopulliset levyt tilattiin EuroCircuitsilta ja niihin kolvattiin komponentit vapun tienoilla. Samoihin aikoihin piirilevyt kiinnitettiin pleksiin ja dokumentaatiota alettiin kirjoittamaan. Työ hiottiin loppuun keskiviikon 8.5. loppudemoa edeltävänä maanantaina ja tiistaina. Toteutunut työnjako Alunperin suunniteltu työnjako oli: Piirilevysuunnittelu: Petri ja Markus Esitestaus: Markus Kokoonpano: yhteisesti Demot: Hannu, Petri Dokumentointi: yhteisesti Suunnittellussa työnjaossa eri työvaiheita oli jaettu eri ihmisille, mutta käytännössä kaikki ryhmäläiset osallistuivat kaikkiin työvaiheisiin. Myöhemmin vastuuta jaettiin toteutettavien PCB:eiden perusteella.
3 Pää-PCB (mikrokontrolleri): Petri Moottoriohjain-PCB: Markus Analogi-PCB: Hannu LCD-PCB: Hannu Vastuualueet menivät kuitenkin lopulta melko päällekkäin, ja kaikki ryhmäläiset tekivät kaikkia osa-alueita: piirilevyjen kolvailua, piirisuunnittelua, pleksin sahausta, demojen ohjelmointia, dokumentointia ja niin edelleen. Käytetyt työtunnit Tässä on kuvattu keskimääräinen projektin tekijän tuntityömäärä. Tuntimäärät saattoivat vaihdella hieman henkilöittäin riippuen päivästä. Ajankäyttö poikkesi suunnitellusta pääasiassa siten, että prototyyppi tehtiin valmiiksi ennen välidemoa ja varsinaiset kitit ennen loppudemoa. Alkuperäisessä suunnitelmassa ei mainittu prototyyppiä. 1. Suunnitelmademoon valmistautuminen, alustava kittien ja demojen suunnittelu ja materiaalien kokoaminen 10h 2. Piirilevyjen suunnittelu 20 h 3. Prototyypin valmistus 15 h 4. Välidemoon valmistautuminen 5h 5. Piirilevyjen tilaus, kolvaus, pleksien tekeminen, kittien kokoaminen 30 h 6. Demon tarkempi suunnittelu 10 h 7. Demon toteutus (ja kittien testaus) 25 h 8. Loppudemoon valmistautuminen, dokumentointi ja viimeistely 15 h Yhteensä 130 h Tuntimäärä vastaa hyvin projektiin varattua viittä opintopistettä. Työn tulokset Kitit Työn lopputuloksena syntyi 4 kappaletta kuvassa 1 näkyvän kaltaista mikrokontrollerikittiä. Lisäksi suunniteltiin kiteillä toteutettavia demoesimerkkejä kolme kappaletta. Kittejä varten myös kirjoitettiin käyttöohje. Yli jääneistä osista ja levyistä olisi mahdollista rakentaa vielä 1-2 kittiä lisää.

4 Kuva 1. Mikrokontrollerin sisältö (ilman kaapeleita): 1. Potentiometrimoduuli, 2. Moottoriohjainmoduuli, 3. Näppäinmatriisi, 4. Analogi/etäisyysmittausmoduuli, 5. Päämoduuli. Mikrokontrollerikitti koostuu mikrokontrollerin sisältävästä päälevystä sekä lisämoduuleista, jotka toimivat mikrokontrollerin ohjaamina sensoreina tai toimilaitteina. Lisämoduulit voi kytkeä 10-pinnisillä kaapeleilla suoraan päälevyyn. Kuvassa 2 on esitetty 10-pinnisen liittimen pinnijako. Mikrokontrollerikitti koostuu seuraavista moduuleista: Päämoduuli: Mikrokontrollerilevy 8 painiketta LCD-moduuli Lisämoduuli 1: Näppäinmatriisi (valmis moduuli) Lisämoduuli 2: A/D-testaus- ja haaroitinlauta potentiometreillä (valmis moduuli) Lisämoduuli 3: Etäisyysmittaus/analogimuunnoslevy Lisämoduuli 4: Servomoottorilevy

5 Kuva pinnisen liittimen pinnit, kun PCB:llä olevaa liitintä katsotaan ylhäältä päin. Pinneissä 1-8 kulkevat analogi- ja digitaalisignaalit, VCC on käyttöjännite ja GND on maa. Vaikka lisämoduulit 1 ja 2 olivat kaupasta ostettuja, tehtiin myös niihin jalusta pleksistä. Pleksit suunniteltiin, mitattiin, sahattiin ja porattiin, Lisämoduulit voidaan kytkeä päämoduuleihin 10-pinnisellä liittimellä, jonka pinnijako on joka kitissä sama. (8 signaalia, käyttöjännite ja maa). Yhdessä päämoduulin liittimistä on kuitenkin myös analogimahdollisuus, jota lisämoduulit 2 ja 3 hyödyntävät. Päämoduulin mikrokontrollerilevyssä on mikrokontrollerin lisäksi virtaliitin, 8 lediä, RS232 - UART-muunnin ja I2C-liitäntä, JTAG-liitin debuggaukseen ja jännitereferenssiliitin. Kaksi päälevyistä toteutettiin ulkoiselle virtalähteelle tarkoitetuksi ja kaksi USB-virransyötölle. USB-virransyöttö havaittiin riittäväksi jopa moottoreita käytettäessä. Demot Työssä suunniteltiin kolme mikrokontrollerikiteillä toteutettavaa demoa, jotka esittelevät kittien mahdollisuuksia. Demoilla voidaan myös testata, että kitit toimivat suunnitellulla tavalla. Kuvassa 3 on nähtävissä demon 3 prototyyppiversio. Demojen koodit ovat liitteessä 2. Demojen toteutus on kuvattu tässä melko ylimalkaisesti, ja käyttöohjeeseen tulee tarkempi kuvaus. 1. Ledien vilkutus Mikrokontrolleri vilkuttelee päälevyn ledejä Knight Rider -tyyliin. Demossa tarvitaan ainoastaan päämoduulia. 2. Etäisyys LCD-näytöllä LCD-näyttö näyttää infrapunaetäisyyssensorin mittaaman etäisyyden. Etäisyys lasketaan kolmen mittauksen keskiarvosta. Toimii huonevalaistuksessa käytännössä n cm etäisyyksillä suht tarkasti. Demossa käytetään päämoduulia ja analogi/etäisyysmittausmoduulia. Analogi/etäisyysmittausmoduuli kytketään analogisignaalin vuoksi päämoduulin porttiin F.

6 3. Moottorin pyörimisnopeus LCD-näytöllä Moottorin pyörimisnopeus on säädettävissä potikalla. Moottorin pyörimisnopeus näkyy LCD-näytöllä. Potentiometrimoduuli kytketään analogisignaalien vuoksi päämoduulin porttiin F. Demossa tarvitaan päämoduuli, moottoriohjainmoduuli ja potentiometrimoduuli. Kuva 3. Moottoridemon protoilua. Käyttöohje Työn tuloksena syntyy myös PDF-muotoinen käyttöohje. Tätä loppuraporttia kirjoitettaessa käyttöohje on vielä keskeneräinen, mutta se tulee olemaan englanniksi ja se sisältää teknisen kuvauksen mikrokontrollerikiteistä, ohjeet niiden ohjelmointiin sekä suunnitellut kolme esimerkkidemoa. Työssä opittua Työssä opimme pääasiassa piirilevysuunnittelua Eaglellä ja KiCadillä. Opimme myös ettei kahta piirilevysuunnitteluohjelmaa kannata käyttää rinnakkain. Moottoriohjain suunniteltiin alun perin KiCadillä, mutta yhteensopivuusongelmien vuoksi se jouduttiin käsin suunnittelemaan uudestaan Eagleen. Työssä päästiin myös prototyyppiversiota valmistettaessa tutustumaan Kone 3:n piirinlevyvalmistusmahdollisuuksiin. Prototyypin ja valmiiden kittien kokoaminen myös opetti TUASin elektroniikkahuoneen ja prosessihallin käyttöä, vaikka tiimin kaikilla jäsenillä oli näihin liittyvistä toimenpiteistä jo aiempaa kokemusta elektroniikkaharrastelujen vuoksi.
7 Ohjelmoinnin suhteen ei tapahtunut suurempaa oppimista, sillä käytimme Arduino-kirjastoa Teensylle. Arduino oli kaikille tiimin jäsenille tuttu entuudestaan. Jatkotyöehdotuksia Jos kittien parissa työskentelyä jatketaan, seuraavia parannusehdotuksia voi käyttää jatkotyön pohjana: lisämoduulin toteutus: analoginen viiden vapausasteen IMU (kiihtyvyysanturit ja gyrot) lisämoduulin toteutus: langaton ZigBee-radiolinkki kommunikointiin tietokoneen tai toisen mikrokontrollerin kanssa kahden lisäkitin kokoaminen jäljelle jääneistä osista lisädemojen kehittäminen, jotta kaikki olemassa olevat moduulit tulevat hyödynnetyksi uusien lisämoduulien ideointi jonkin järjestelmän toteuttaminen kitin mahdollisuuksia hyödyntäen uusien ominaisuuksien dokumentointi Yhteenveto Projektityön tarkoituksena oli tuottaa opetustarkoitukseen soveltuvia mikrokontrollerikittejä. Asetetut tavoitteet saavutettiin, sillä kittejä toteutettiin 4 kappaletta. Myös ylimääräisiä osia jäi jäljelle, joista voisi rakentaa vielä muutaman kitin. Opetustarkoitusta korostaa myös se, että kitteihin tuotetaan käyttöohje. Käyttöohjeessa tulee olemaan kuvattuna esimerkkidemoja, jotka hyödyntävät kittien ominaisuuksia. Demojen koodit myös kommentoidaan paremmin käyttöohjeeseen. Työhön käytettiin noin 8 henkilökohtaista tuntia (4 tuntia ryhmätyötä ja 4 tuntia yksilötyötä) viikossa koko kevään ajan, mikä vastaa melko hyvin työn 5 opintopisteen laajuutta.
8 Liite 1. Toteutettujen levyjen suunnitelmat Päälevy
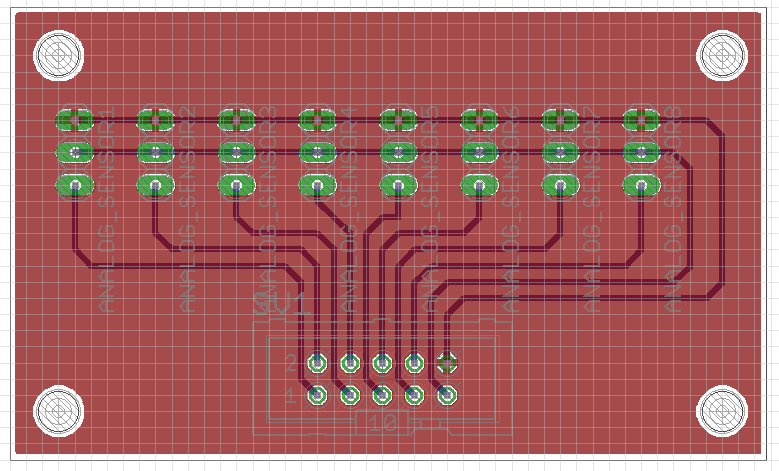
9 Analogilevy
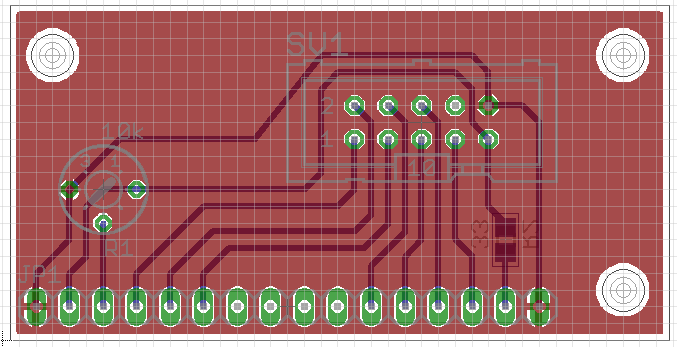
10 LCD-adapteri
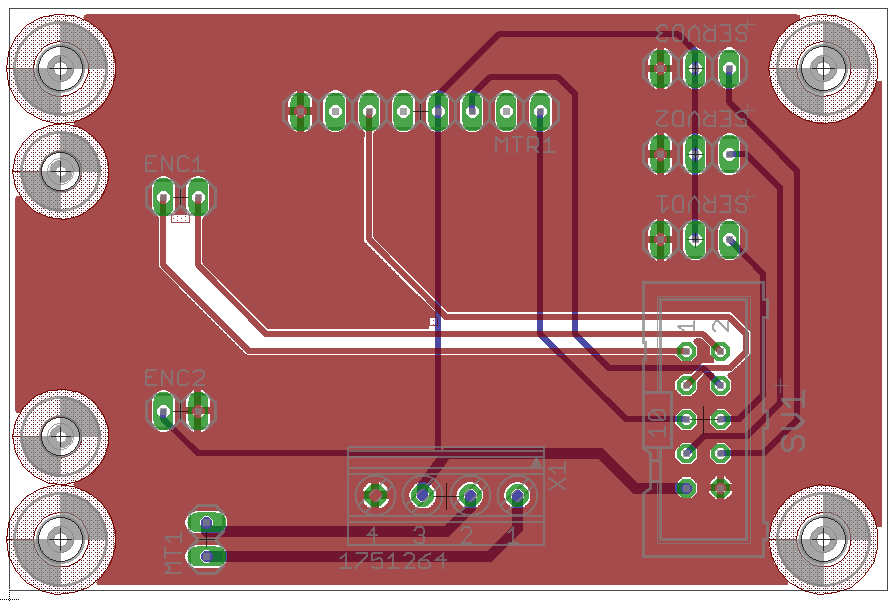
11 Moottoriohjainlevy
12 Liite 2. Demojen koodit (esimerkkejä) Viimeisimmät versiot ovat käyttöohjeessa 1. Ledien vilkutus /* *Knightrider */ voidsetup(){ DDRA=0xFF; PORTA=0x00; voidloop(){ PORTA=0x01; while(pina!=0x80){ delay(200); PORTA<<=1; PORTA=0x80; while(pina!=0x01){ delay(200); PORTA>>=1; 2.Etäisyysmittaus /* *IRdistancesensor */ #include<liquidcrystal.h> LiquidCrystallcd(20,21,22,23,24,25,26); floatread_gp2d12_range(bytepin){ inttmp; tmp=analogread(pin); if(tmp<3)
13 return-1;//invalidvalue return(6787.0/((float)tmp-3.0))-4.0; voidsetup(){ lcd.begin(16,2); voidloop(){ floatval=0.5f*read_gp2d12_range(38); lcd.clear(); lcd.setcursor(0,0); lcd.print("distance:"); lcd.setcursor(0,1); lcd.print(val); lcd.print("cm"); delay(200); 3. Moottorin pyörimisnopeus LCD-näytöllä /* MOTOR */ #include<liquidcrystal.h> LiquidCrystallcd(32,33,34,35,28,29,30);//PORTA voidsetup() { //Initializelcd lcd.begin(16,2); pinmode(22,output);//in1 pinmode(23,output);//in2 voidloop() { //Readvalue
14 intval=analogread(38)/2; // lcd.clear(); lcd.print("setpoint:"); lcd.print(val-256); if(val>240&&val<280){ //Freespinning digitalwrite(22,low); digitalwrite(23,low); analogwrite(27,0); elseif(val>280){ //Spinfoward digitalwrite(22,high); digitalwrite(23,low); analogwrite(27,val-257); else{ //Spinbackward digitalwrite(22,low); digitalwrite(23,high); analogwrite(27,255-val); delay(100);
Mikrokontrollerikitit - väliraportti
 Mikrokontrollerikitit - väliraportti AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Hannu Leppinen 78673R Petri Niemelä 221643 Markus Peltola 84765H 27.3.2013 Työn kuvaus Projektityön tarkoituksena
Mikrokontrollerikitit - väliraportti AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Hannu Leppinen 78673R Petri Niemelä 221643 Markus Peltola 84765H 27.3.2013 Työn kuvaus Projektityön tarkoituksena
S14 09 Sisäpeltorobotti AS Automaatio ja systeemitekniikan projektityöt. Antti Kulpakko, Mikko Ikonen
 S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
A13-03 Kaksisuuntainen akkujen tasauskortti. Väliaikaraportti. Automaatio- ja systeemitekniikan projektityöt AS Syksy 2013
 A13-03 Kaksisuuntainen akkujen tasauskortti Väliaikaraportti Automaatio- ja systeemitekniikan projektityöt AS-0.3200 Syksy 2013 Arto Mikola Aku Kyyhkynen 22.10.2013 Sisällysluettelo Sisällysluettelo...
A13-03 Kaksisuuntainen akkujen tasauskortti Väliaikaraportti Automaatio- ja systeemitekniikan projektityöt AS-0.3200 Syksy 2013 Arto Mikola Aku Kyyhkynen 22.10.2013 Sisällysluettelo Sisällysluettelo...
Akkujen aktiivinen balansointi
 Väliraportti 1(5) Akkujen aktiivinen balansointi Ohjaaja: Jorma Selkäinaho Työryhmä: Kalle Fagerman Johan Holmberg Otso Jousimaa Aleksi Salonen Väliraportti 2(5) Johdanto Projektimme jatkaa syksyllä aloitettua
Väliraportti 1(5) Akkujen aktiivinen balansointi Ohjaaja: Jorma Selkäinaho Työryhmä: Kalle Fagerman Johan Holmberg Otso Jousimaa Aleksi Salonen Väliraportti 2(5) Johdanto Projektimme jatkaa syksyllä aloitettua
S12-11. Portaalinosturi AS-0.3200. Projektisuunnitelma 2012. Oleg Kovalev
 S12-11 Portaalinosturi AS-0.3200 Projektisuunnitelma 2012 Oleg Kovalev Sisällys 1. Työn tavoite... 3 2. Projektin osa-alueet... 3 2.1. Suunnittelu... 3 2.2. Komponenttien hankinta... 3 2.3. Valmistus...
S12-11 Portaalinosturi AS-0.3200 Projektisuunnitelma 2012 Oleg Kovalev Sisällys 1. Työn tavoite... 3 2. Projektin osa-alueet... 3 2.1. Suunnittelu... 3 2.2. Komponenttien hankinta... 3 2.3. Valmistus...
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
S14 09 Sisäpeltorobotti AS Automaatio ja systeemitekniikan projektityöt. Antti Kulpakko, Mikko Ikonen
 S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
LUMA SUOMI -kehittämisohjelma LUMA FINLAND -utvecklingsprogram LUMA FINLAND development programme Ohjelmointia Arduinolla
 Ohjelmointia Arduinolla Kyösti Blinnikka, Olarin koulu ja lukio LUMA-keskus Aalto Mikä on Arduino? Open Source Electronics Prototyping Platform Arduino on avoimeen laitteistoon ja ohjelmistoon perustuva
Ohjelmointia Arduinolla Kyösti Blinnikka, Olarin koulu ja lukio LUMA-keskus Aalto Mikä on Arduino? Open Source Electronics Prototyping Platform Arduino on avoimeen laitteistoon ja ohjelmistoon perustuva
Electric power steering
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Electric power steering Ohjausmoottorin jäähdytys ja ylikuumenemisen esto Väliraportti 15.10.2014 Työn ohjaaja: Ville Matikainen Tekijät: Samppa
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Electric power steering Ohjausmoottorin jäähdytys ja ylikuumenemisen esto Väliraportti 15.10.2014 Työn ohjaaja: Ville Matikainen Tekijät: Samppa
A11-02 Infrapunasuodinautomatiikka kameralle
 A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt. Projektisuunnitelma. Peltorobotin akselimoduulin ohjain
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Projektisuunnitelma Peltorobotin akselimoduulin ohjain Joni Rannisto Janne Hafrén Matti Koskinen 31.1.2012 1 1. Projektin tavoite Projektin tavoitteena
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Projektisuunnitelma Peltorobotin akselimoduulin ohjain Joni Rannisto Janne Hafrén Matti Koskinen 31.1.2012 1 1. Projektin tavoite Projektin tavoitteena
Power Steering for ATV
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Power Steering for ATV 27.1.2014 Juuso Meriläinen Antti Alakiikonen Aleksi Vulli Meriläinen, Vulli, Alakiikonen 1/6 Projektin tavoite Projektityössä
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Power Steering for ATV 27.1.2014 Juuso Meriläinen Antti Alakiikonen Aleksi Vulli Meriläinen, Vulli, Alakiikonen 1/6 Projektin tavoite Projektityössä
Peltorobotin akselimoduulin kontrolleri
 Peltorobotin akselimoduulin kontrolleri Automaatio- ja systeemitekniikan projektityöt B.Sc. Joni Rannisto (Mech.) Janne Hafrén (Mech.) Matti Koskinen (Mech.) Esitelmän rakenne 1. Tehtävänanto ja vaatimukset
Peltorobotin akselimoduulin kontrolleri Automaatio- ja systeemitekniikan projektityöt B.Sc. Joni Rannisto (Mech.) Janne Hafrén (Mech.) Matti Koskinen (Mech.) Esitelmän rakenne 1. Tehtävänanto ja vaatimukset
S11-09 Control System for an. Autonomous Household Robot Platform
 S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
A13-03 Kaksisuuntainen akkujen tasauskortti. Loppuraportti. Automaatio- ja systeemitekniikan projektityöt AS Syksy 2013
 A13-03 Kaksisuuntainen akkujen tasauskortti Loppuraportti Automaatio- ja systeemitekniikan projektityöt AS-0.3200 Syksy 2013 Arto Mikola Aku Kyyhkynen 5.12.2013 Sisällysluettelo Sisällysluettelo... 2 1
A13-03 Kaksisuuntainen akkujen tasauskortti Loppuraportti Automaatio- ja systeemitekniikan projektityöt AS-0.3200 Syksy 2013 Arto Mikola Aku Kyyhkynen 5.12.2013 Sisällysluettelo Sisällysluettelo... 2 1
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-03 USB-käyttöinen syvyysanturi 5op 13.9.2011-29.11.2011 Johan Backlund Ohjaaja: Johan Grönholm Johdanto Projektin tavoitteena oli suunnitella
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-03 USB-käyttöinen syvyysanturi 5op 13.9.2011-29.11.2011 Johan Backlund Ohjaaja: Johan Grönholm Johdanto Projektin tavoitteena oli suunnitella
AS Automaatio- ja systeemitekniikan projektityöt
 3/19/2012 AALTO- YLIOPISTO AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Joni Rannisto Matti Koskinen Janne Hafrén 1. Projektin tavoite Projektin tavoitteena on rakentaa akselimoduulin ohjain
3/19/2012 AALTO- YLIOPISTO AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Joni Rannisto Matti Koskinen Janne Hafrén 1. Projektin tavoite Projektin tavoitteena on rakentaa akselimoduulin ohjain
A14-11 Potilaan mittaustiedon siirtäminen matkapuhelimeen
 1 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A14-11 Potilaan mittaustiedon siirtäminen matkapuhelimeen Projektisuunnitelma Tommi Salminen, Hanna Ukkola, Olli Törmänen 19.09.2014 1 Projektin
1 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A14-11 Potilaan mittaustiedon siirtäminen matkapuhelimeen Projektisuunnitelma Tommi Salminen, Hanna Ukkola, Olli Törmänen 19.09.2014 1 Projektin
ZigBee-ohjaus kuorma-autolle
 ZigBee-ohjaus kuorma-autolle Juho Frits Petteri Koivumäki 10. helmikuuta 2010 Tavoitteet Projektityössä on tavoitteena rakentaa langaton ZigBee-ohjausverkko kaukoohjattavalle kuorma-autolle (kts. Kuva
ZigBee-ohjaus kuorma-autolle Juho Frits Petteri Koivumäki 10. helmikuuta 2010 Tavoitteet Projektityössä on tavoitteena rakentaa langaton ZigBee-ohjausverkko kaukoohjattavalle kuorma-autolle (kts. Kuva
Verkkopokerijärjestelmä. Loppuraportti Ryhmä Kanat Ohjelmistotuotantoprojekti, syksy 2008
 Verkkopokerijärjestelmä Loppuraportti Ryhmä Kanat Ohjelmistotuotantoprojekti, syksy 2008 Projektiryhmä Samuli Aalto-Setälä Jukka Kekälainen Jarno Kyykkä Mika Mielonen Mårten Smeds Otto Waltari Ohjaaja
Verkkopokerijärjestelmä Loppuraportti Ryhmä Kanat Ohjelmistotuotantoprojekti, syksy 2008 Projektiryhmä Samuli Aalto-Setälä Jukka Kekälainen Jarno Kyykkä Mika Mielonen Mårten Smeds Otto Waltari Ohjaaja
Projektisuunnitelma. (välipalautukseen muokattu versio) Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus
 Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus") Projektisuunnitelma (välipalautukseen muokattu versio) Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus Ville Toiviainen Tomi Tuovinen Lauri af Heurlin Tavoite Projektin tarkoituksena
Projektisuunnitelma (välipalautukseen muokattu versio) Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus Ville Toiviainen Tomi Tuovinen Lauri af Heurlin Tavoite Projektin tarkoituksena
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-17 Ikäihmisten kotona asumista tukevien järjestelmien kehittäminen AikatauluValpas Salla Ojala Paula Laitio 1. Projektin tavoite Projektimme
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-17 Ikäihmisten kotona asumista tukevien järjestelmien kehittäminen AikatauluValpas Salla Ojala Paula Laitio 1. Projektin tavoite Projektimme
LED- päivyrinäyttö. 1: Anssi Kalliomäki, Marko Virtanen, Tomas Truedsson, Petri Syvälähde
 1: Anssi Kalliomäki, Marko Virtanen, Tomas Truedsson, Petri Syvälähde LED- päivyrinäyttö Ohjeet on kirjoitettu sinisellä. Poista ne lopullisesta dokumentista ja korvaa oikeilla tiedoilla. Sisällys Lyhenteet
1: Anssi Kalliomäki, Marko Virtanen, Tomas Truedsson, Petri Syvälähde LED- päivyrinäyttö Ohjeet on kirjoitettu sinisellä. Poista ne lopullisesta dokumentista ja korvaa oikeilla tiedoilla. Sisällys Lyhenteet
Semifinaalin aikataulu ja paikka. Semifinaalikoordinaattori. Kilpailijamäärä. Elektroniikkalajin semifinaalitehtävien kuvaukset
 Semifinaalin aikataulu ja paikka 15.1.2014 (varapäivä 16.1.2014) Salon seudun ammattiopisto Venemestarinkatu 35 24240 SALO Semifinaalikoordinaattori Raimo Mäkelä Salon seudun ammattiopisto raimo.makela
Semifinaalin aikataulu ja paikka 15.1.2014 (varapäivä 16.1.2014) Salon seudun ammattiopisto Venemestarinkatu 35 24240 SALO Semifinaalikoordinaattori Raimo Mäkelä Salon seudun ammattiopisto raimo.makela
Projektityöt. Sami Alaiso, Jyri Lujanen 30. marraskuuta 2009
 Projektityöt Sami Alaiso, Jyri Lujanen 30. marraskuuta 2009 1 1 Yleistä Projektityön tarkoituksena oli suunnitella ja toteuttaa yleiskäyttöinen CAN-ohjain, jolla voidaan vastaanottaa viestejä CAN-väylältä,
Projektityöt Sami Alaiso, Jyri Lujanen 30. marraskuuta 2009 1 1 Yleistä Projektityön tarkoituksena oli suunnitella ja toteuttaa yleiskäyttöinen CAN-ohjain, jolla voidaan vastaanottaa viestejä CAN-väylältä,
Projektisuunnitelma. Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys
 1 Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys Muutoshistoria Versionumero Pvm Selitys Tekijä(t) 0.1 18.9.2012 Otso Saarentaus 2 Sisällysluettelo 1 PROJEKTIN SISÄLTÖ... 3 1.1 TAUSTA......3
1 Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys Muutoshistoria Versionumero Pvm Selitys Tekijä(t) 0.1 18.9.2012 Otso Saarentaus 2 Sisällysluettelo 1 PROJEKTIN SISÄLTÖ... 3 1.1 TAUSTA......3
Projektisuunnitelma Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus
 Projektisuunnitelma Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus Ville Toiviainen Tomi Tuovinen Lauri af Heurlin Tavoite Projektin tarkoituksena on luoda valmis sekvenssiohjelma säätötekniikan
Projektisuunnitelma Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus Ville Toiviainen Tomi Tuovinen Lauri af Heurlin Tavoite Projektin tarkoituksena on luoda valmis sekvenssiohjelma säätötekniikan
S09 04 Kohteiden tunnistaminen 3D datasta
 AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
ELEC-C1110 Automaatio- ja systeemitekniikan. Luento 11 Esimerkki automaation soveltamisesta
 ELEC-C1110 Automaatio- ja systeemitekniikan perusteet Luento 11 Esimerkki automaation soveltamisesta Tämän luennon aihe Esimerkki automaation soveltamisesta käytännössä: WorkPartner-palvelurobotti WorkPartner
ELEC-C1110 Automaatio- ja systeemitekniikan perusteet Luento 11 Esimerkki automaation soveltamisesta Tämän luennon aihe Esimerkki automaation soveltamisesta käytännössä: WorkPartner-palvelurobotti WorkPartner
Elektroniikkalajin semifinaalitehtävien kuvaukset
 Elektroniikkalajin semifinaalitehtävien kuvaukset Kilpailija rakentaa ja testaa mikrokontrollerilla ohjattavaa jännitereferenssiä hyödyntävän sovelluksen. Toteutus koostuu useasta elektroniikkamoduulista.
Elektroniikkalajin semifinaalitehtävien kuvaukset Kilpailija rakentaa ja testaa mikrokontrollerilla ohjattavaa jännitereferenssiä hyödyntävän sovelluksen. Toteutus koostuu useasta elektroniikkamoduulista.
Teknologiaa kouluun -projekti
 Teknologiaa kouluun -projekti 01/2012 Tiina Partanen & Jouni Kinnunen 2 Teknologiaa kouluun -projekti n omien opettajien ideoima opetuksen ja oppimisympäristöjen kehittämisprojekti Projektin tavoitteena
Teknologiaa kouluun -projekti 01/2012 Tiina Partanen & Jouni Kinnunen 2 Teknologiaa kouluun -projekti n omien opettajien ideoima opetuksen ja oppimisympäristöjen kehittämisprojekti Projektin tavoitteena
Tieverkon kunnon stokastinen ennustemalli ja sen soveltaminen riskienhallintaan
 Mat 2.4177Operaatiotutkimuksenprojektityöseminaari Tieverkonkunnonstokastinenennustemallija sensoveltaminenriskienhallintaan Väliraportti 3/4/2009 Toimeksiantajat: PöyryInfraOy(PekkaMild) Tiehallinto(VesaMännistö)
Mat 2.4177Operaatiotutkimuksenprojektityöseminaari Tieverkonkunnonstokastinenennustemallija sensoveltaminenriskienhallintaan Väliraportti 3/4/2009 Toimeksiantajat: PöyryInfraOy(PekkaMild) Tiehallinto(VesaMännistö)
Ohjelmoi Arduino Grovella
 Ohjelmoi Arduino Grovella Tomi Hukkalainen ja Kati Sormunen 25.9.2016 2016 Innokas 1 Tarvikkeet 25.9.2016 2016 Innokas 2 Tarvikkeet Näissä harjoituksissa käytetään Seeduino Lotus piirilevyä, jossa käytetään
Ohjelmoi Arduino Grovella Tomi Hukkalainen ja Kati Sormunen 25.9.2016 2016 Innokas 1 Tarvikkeet 25.9.2016 2016 Innokas 2 Tarvikkeet Näissä harjoituksissa käytetään Seeduino Lotus piirilevyä, jossa käytetään
Siimasta toteutettu keinolihas
 AS 0.3200 Automaatio ja systeemitekniikan projektityöt Projektisuunnitelma: Siimasta toteutettu keinolihas Laura Gröhn 224417 Mikko Kyllönen 221177 Lauri Liukko Sipi 84702A Susanna Porkka 225131 3.2.2015
AS 0.3200 Automaatio ja systeemitekniikan projektityöt Projektisuunnitelma: Siimasta toteutettu keinolihas Laura Gröhn 224417 Mikko Kyllönen 221177 Lauri Liukko Sipi 84702A Susanna Porkka 225131 3.2.2015
Akkujen aktiivinen balansointi
 Projektisuunnitelma 1(6) Akkujen aktiivinen balansointi Valvoja: Jorma Selkäinaho Työryhmä: Kalle Fagerman Johan Holmberg Otso Jousimaa Aleksi Jalonen Projektisuunnitelma 2(6) Johdanto Projektimme jatkaa
Projektisuunnitelma 1(6) Akkujen aktiivinen balansointi Valvoja: Jorma Selkäinaho Työryhmä: Kalle Fagerman Johan Holmberg Otso Jousimaa Aleksi Jalonen Projektisuunnitelma 2(6) Johdanto Projektimme jatkaa
Käyttöjärjestelmien historia. Joni Herttuainen Henri Jantunen Markus Maijanen Timo Saksholm Johanna Tjäder Eetu Turunen
 Käyttöjärjestelmien historia Joni Herttuainen Henri Jantunen Markus Maijanen Timo Saksholm Johanna Tjäder Eetu Turunen Käyttöjärjestelmien jaottelu Voidaan jaotella erilaisin menetelmin Aikajana (määrä,
Käyttöjärjestelmien historia Joni Herttuainen Henri Jantunen Markus Maijanen Timo Saksholm Johanna Tjäder Eetu Turunen Käyttöjärjestelmien jaottelu Voidaan jaotella erilaisin menetelmin Aikajana (määrä,
Akkujen aktiivinen balansointi
 Projektisuunnitelma 1(6) Akkujen aktiivinen balansointi Linkki esitykseen (poista tämä linkki, kun ei ole enää tarpeen): https://docs.google.com/presentation/d/1gk9nbxyn5mkjygol2wp2px1xo1nqgsgkhftp3oeu1
Projektisuunnitelma 1(6) Akkujen aktiivinen balansointi Linkki esitykseen (poista tämä linkki, kun ei ole enää tarpeen): https://docs.google.com/presentation/d/1gk9nbxyn5mkjygol2wp2px1xo1nqgsgkhftp3oeu1
Tehtävä 5. ECIO dataloggeri lämpötila-anturilla
 Tehtävä 5. ECIO dataloggeri lämpötila-anturilla Tehtävänä on rakentaa lämpötilamittausjärjestelmän prototyyppi verolevylle ja yhdistää se tietokoneen sarjaterminaaliohjelmaan. Käytettävissä on mikro-ohjaimen
Tehtävä 5. ECIO dataloggeri lämpötila-anturilla Tehtävänä on rakentaa lämpötilamittausjärjestelmän prototyyppi verolevylle ja yhdistää se tietokoneen sarjaterminaaliohjelmaan. Käytettävissä on mikro-ohjaimen
LOPPURAPORTTI Paperikonekilta Versio 1.0
 Loppuraportti LITA/TIKO/PAPERIKONEKILTA 1 (14) 18.5.2009 LOPPURAPORTTI Paperikonekilta Versio 1.0 Tekijät: Jaakko Karhunen Jani Hyvönen TIKO, IT-Dynamo 5.kerros Osoite: Tietojenkäsittelyn koulutusohjelma
Loppuraportti LITA/TIKO/PAPERIKONEKILTA 1 (14) 18.5.2009 LOPPURAPORTTI Paperikonekilta Versio 1.0 Tekijät: Jaakko Karhunen Jani Hyvönen TIKO, IT-Dynamo 5.kerros Osoite: Tietojenkäsittelyn koulutusohjelma
Projektisuunnitelma: Vesipistekohtainen veden kulutuksen seuranta, syksy Mikko Kyllönen Matti Marttinen Vili Tuomisaari
 Projektisuunnitelma: Vesipistekohtainen veden kulutuksen seuranta, syksy 2015 Mikko Kyllönen Matti Marttinen Vili Tuomisaari Projektin tavoite Tämän projektin tavoitteena on kehittää prototyyppi järjestelmästä,
Projektisuunnitelma: Vesipistekohtainen veden kulutuksen seuranta, syksy 2015 Mikko Kyllönen Matti Marttinen Vili Tuomisaari Projektin tavoite Tämän projektin tavoitteena on kehittää prototyyppi järjestelmästä,
Projekti A: iskunvaimennindynamometri
 Projekti A: iskunvaimennindynamometri PROJEKTISUUNNITELMA Tekijät: Mälkönen Joonas Orhanen Samppa Pajula Matti Forsström Niko 83D 838C 8757V 8830U Nurminen Tuomas Päiväys: 5.3. Kon-6.08 Ajoneuvojen tuotekehitys
Projekti A: iskunvaimennindynamometri PROJEKTISUUNNITELMA Tekijät: Mälkönen Joonas Orhanen Samppa Pajula Matti Forsström Niko 83D 838C 8757V 8830U Nurminen Tuomas Päiväys: 5.3. Kon-6.08 Ajoneuvojen tuotekehitys
JOHDATUS ELEKTRONIIKKAAN. Oppitunti 2 Elektroniikan järjestelmät
 JOHDATUS ELEKTRONIIKKAAN Oppitunti 2 Elektroniikan järjestelmät 2 ELEKTRONIIKAN JÄRJESTELMÄT Aktiivisuusranneke Mittaa liikettä Keskustelee käyttäjän kanssa ledeillä ja värinällä Keskustelee radioiden
JOHDATUS ELEKTRONIIKKAAN Oppitunti 2 Elektroniikan järjestelmät 2 ELEKTRONIIKAN JÄRJESTELMÄT Aktiivisuusranneke Mittaa liikettä Keskustelee käyttäjän kanssa ledeillä ja värinällä Keskustelee radioiden
Sisäilman laadun mittausjärjestelmän rakentaminen ZigBee-verkon avulla
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt: Sisäilman laadun mittausjärjestelmän rakentaminen ZigBee-verkon avulla Projektisuunnitelma Ari-Heikki Rintaniemi Joonas Sundberg 31. tammikuuta
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt: Sisäilman laadun mittausjärjestelmän rakentaminen ZigBee-verkon avulla Projektisuunnitelma Ari-Heikki Rintaniemi Joonas Sundberg 31. tammikuuta
Tehtävään on varattu aikaa 8:30 10:00. Seuraavaan tehtävään saat siirtyä aiemminkin. Välipalatarjoilu työpisteisiin 10:00
 LUE KOKO OHJE HUOLELLA LÄPI ENNEN KUIN ALOITAT!!! Tehtävä 1a Tehtävään on varattu aikaa 8:30 10:00. Seuraavaan tehtävään saat siirtyä aiemminkin. Välipalatarjoilu työpisteisiin 10:00 MITTAUSMODULIN KOKOAMINEN
LUE KOKO OHJE HUOLELLA LÄPI ENNEN KUIN ALOITAT!!! Tehtävä 1a Tehtävään on varattu aikaa 8:30 10:00. Seuraavaan tehtävään saat siirtyä aiemminkin. Välipalatarjoilu työpisteisiin 10:00 MITTAUSMODULIN KOKOAMINEN
AS-0.3200 - Automaatio- ja systeemitekniikan projektityöt. Robottialustan instrumentointi ja käyttöönotto
 Tehtävänanto: AS-0.3200 - Automaatio- ja systeemitekniikan projektityöt Robottialustan instrumentointi ja käyttöönotto Työn tehtävänä on käyttöönottaa Pioneer P3-DX robottialusta sekä asentaa siihen tietokone
Tehtävänanto: AS-0.3200 - Automaatio- ja systeemitekniikan projektityöt Robottialustan instrumentointi ja käyttöönotto Työn tehtävänä on käyttöönottaa Pioneer P3-DX robottialusta sekä asentaa siihen tietokone
Toteutusvaihe T2 Edistymisraportti
 Toteutusvaihe T2 Edistymisraportti Sisällysluettelo 1. Projektin tila...3 1.1. Suoritetut tehtävät...4 1.2. Käytetyt menetelmät...5 1.3. Ongelmat...6 1.4. Jatkosuunnitelmat...6 Versio- ja muutoshistoria
Toteutusvaihe T2 Edistymisraportti Sisällysluettelo 1. Projektin tila...3 1.1. Suoritetut tehtävät...4 1.2. Käytetyt menetelmät...5 1.3. Ongelmat...6 1.4. Jatkosuunnitelmat...6 Versio- ja muutoshistoria
ENG-A1002 ARTS-ENG-Projekti. B-kori
 ENG-A1002 ARTS-ENG-Projekti B-kori 11.4.2017 Innovatiivinen kuljetin B-korissa pyritään löytämään: uusi tai paranneltu tuotekonsepti kappaletavaroiden tai materiaalien käsittelyyn, siirtelyyn tai kuljetukseen.
ENG-A1002 ARTS-ENG-Projekti B-kori 11.4.2017 Innovatiivinen kuljetin B-korissa pyritään löytämään: uusi tai paranneltu tuotekonsepti kappaletavaroiden tai materiaalien käsittelyyn, siirtelyyn tai kuljetukseen.
Käyttäjien tunnistaminen ja käyttöoikeuksien hallinta hajautetussa ympäristössä
 www.niksula.cs.hut.fi/~jjkankaa// Testauksen loppuraportti v. 1.0 Päivitetty 23.4.2001 klo 19:05 Mikko Viljainen 2 (14) Dokumentin versiohistoria Versio Päivämäärä Tekijä / muutoksen tekijä Selite 1.0
www.niksula.cs.hut.fi/~jjkankaa// Testauksen loppuraportti v. 1.0 Päivitetty 23.4.2001 klo 19:05 Mikko Viljainen 2 (14) Dokumentin versiohistoria Versio Päivämäärä Tekijä / muutoksen tekijä Selite 1.0
Elektroniikka II 2012 - lopputyön ohje
 Elektroniikka II 2012 - lopputyön ohje Yleisesti Tehtävänäsi on suunnitella elektroninen noppa, elektroninen kassakaapin lukko, sykemittari, elektroninen Braille-tulkki, morsekooderi/-dekooderi tai oma
Elektroniikka II 2012 - lopputyön ohje Yleisesti Tehtävänäsi on suunnitella elektroninen noppa, elektroninen kassakaapin lukko, sykemittari, elektroninen Braille-tulkki, morsekooderi/-dekooderi tai oma
1 YLEISTÄ. Taitaja2002, Imatra Teollisuuselektroniikkatyö Protorakentelu 1.1 PROJEKTIN TARKOITUS
 Taitaja2002, Imatra Teollisuuselektroniikkatyö Protorakentelu 1 YLEISTÄ 1.1 PROJEKTIN TARKOITUS Tämä projekti on mikrokontrollerilla toteutettu lämpötilan seuranta kortti. Kortti kerää lämpöantureilta
Taitaja2002, Imatra Teollisuuselektroniikkatyö Protorakentelu 1 YLEISTÄ 1.1 PROJEKTIN TARKOITUS Tämä projekti on mikrokontrollerilla toteutettu lämpötilan seuranta kortti. Kortti kerää lämpöantureilta
Kirja on jaettu kahteen osaan: varsinaiseen- ja lisätieto-osioon. Varsinainen
 Alkusanat Tämän tieto- ja viestintätekniikan oppikirjan ensimmäinen versio (1. painos) syntyi vuonna 2006 Jyväskylän yliopiston tietotekniikan laitokselle tekemäni pro gradu -tutkielmani yhteydessä. Tutkimuksessani
Alkusanat Tämän tieto- ja viestintätekniikan oppikirjan ensimmäinen versio (1. painos) syntyi vuonna 2006 Jyväskylän yliopiston tietotekniikan laitokselle tekemäni pro gradu -tutkielmani yhteydessä. Tutkimuksessani
TTY/OHJ: OHJ-3500 Ohjelmistotuotannon projektityö
 TTY/OHJ: OHJ-3500 Ohjelmistotuotannon projektityö Jokaisessa yliopistossa ja AMK:ssa on projektityö-kurssi, mutta niillä kullakin on oma muotonsa, sisältönsä ja tavoitteensa. OHJ-3500 (laajuus 6-10 opintopistettä):
TTY/OHJ: OHJ-3500 Ohjelmistotuotannon projektityö Jokaisessa yliopistossa ja AMK:ssa on projektityö-kurssi, mutta niillä kullakin on oma muotonsa, sisältönsä ja tavoitteensa. OHJ-3500 (laajuus 6-10 opintopistettä):
Robottialustan instrumentointi ja käyttöönotto
 Niilo Heinonen Hannu Häyrinen Matias Katajamäki Tuomas Pylvänen Robottialustan instrumentointi ja käyttöönotto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt 1. Projektin tavoite Projektin puitteissa
Niilo Heinonen Hannu Häyrinen Matias Katajamäki Tuomas Pylvänen Robottialustan instrumentointi ja käyttöönotto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt 1. Projektin tavoite Projektin puitteissa
Asiakas ja tavoite. Tekninen toteutus
 Asiakas ja tavoite Heikieli on vuonna 2015 perustettu yhden hengen asiantuntijayritys, joka tarjoaa käännös- ja oikolukupalveluita englannista ja saksasta suomeksi. Freelance-kääntäjiä on Suomessa paljon,
Asiakas ja tavoite Heikieli on vuonna 2015 perustettu yhden hengen asiantuntijayritys, joka tarjoaa käännös- ja oikolukupalveluita englannista ja saksasta suomeksi. Freelance-kääntäjiä on Suomessa paljon,
602 Elektroniikka. Kilpailutehtävä 1. Asiakirjan nimi 1(2) 7.2.2014. LEDeillä toteutetun nuolimoduulin kokoaminen ja testaus (10p)
 7.2.2014. LEDeillä toteutetun nuolimoduulin kokoaminen ja testaus (10p)") 602 Elektroniikka Kilpailutehtävä 1 LEDeillä toteutetun nuolimoduulin kokoaminen ja testaus (10p) Tehtävänä on kalustaa valmis nuolimoduulin piirikortti dokumentaation mukaisesti. Piirikortille asennettavat
602 Elektroniikka Kilpailutehtävä 1 LEDeillä toteutetun nuolimoduulin kokoaminen ja testaus (10p) Tehtävänä on kalustaa valmis nuolimoduulin piirikortti dokumentaation mukaisesti. Piirikortille asennettavat
Tällä ohjelmoitavalla laitteella saat hälytyksen, mikäli lämpötila nousee liian korkeaksi.
 Lämpötilahälytin Tällä ohjelmoitavalla laitteella saat hälytyksen, mikäli lämpötila nousee liian korkeaksi. Laite koostuu Arduinokortista ja koekytkentälevystä. Hälyttimen toiminnat ohjelmoidaan Arduinolle.
Lämpötilahälytin Tällä ohjelmoitavalla laitteella saat hälytyksen, mikäli lämpötila nousee liian korkeaksi. Laite koostuu Arduinokortista ja koekytkentälevystä. Hälyttimen toiminnat ohjelmoidaan Arduinolle.
Kirja on jaettu kahteen osaan: varsinaiseen- ja lisätieto-osioon. Varsinainen
 Alkusanat Tämä tieto- ja viestintätekniikan oppikirja on päivitetty versio vuonna 2007 julkaisemastani Tieto- ja viestintätekniikka -oppikirjasta. Päivityksessä kirjan sisällöt on ajantasaistettu ja samalla
Alkusanat Tämä tieto- ja viestintätekniikan oppikirja on päivitetty versio vuonna 2007 julkaisemastani Tieto- ja viestintätekniikka -oppikirjasta. Päivityksessä kirjan sisällöt on ajantasaistettu ja samalla
SOVELLUSPROJEKTIN ARVIOINTILOMAKE
 SOVELLUSPROJEKTIN ARVIOINTILOMAKE Arviointilomake on tarkoitettu Sovellusprojektin vastaavan ohjaajan arvioinnin tueksi, eikä sillä siten tule korvata erillistä projektilausuntoa. Useaa arviointikohtaa
SOVELLUSPROJEKTIN ARVIOINTILOMAKE Arviointilomake on tarkoitettu Sovellusprojektin vastaavan ohjaajan arvioinnin tueksi, eikä sillä siten tule korvata erillistä projektilausuntoa. Useaa arviointikohtaa
Joulupukin työpaja leipomalla piparkakkutaikinasta kolmen kurssin yhteinen harjoitustyö
 Joulupukin työpaja leipomalla piparkakkutaikinasta kolmen kurssin yhteinen harjoitustyö TkT Kari Kisko TkT Juha Lindfors Oulun yliopisto Itä-Suomen yliopisto Tuotantotalouden Kansanterveystiede ja kliininen
Joulupukin työpaja leipomalla piparkakkutaikinasta kolmen kurssin yhteinen harjoitustyö TkT Kari Kisko TkT Juha Lindfors Oulun yliopisto Itä-Suomen yliopisto Tuotantotalouden Kansanterveystiede ja kliininen
Jyrki Kullaa ohjaava opettaja. Mika Miettinen puheenjohtaja
 TKI-Projekti: /3 Aloituskokous Aika 6..204 klo.00 Paikka Metropolia AMK, Eerikinkatu 36, Helsinki Läsnä Sebastian Gumenius sihteeri Jyrki Kullaa ohjaava opettaja Mika Miettinen puheenjohtaja. Kokouksen
TKI-Projekti: /3 Aloituskokous Aika 6..204 klo.00 Paikka Metropolia AMK, Eerikinkatu 36, Helsinki Läsnä Sebastian Gumenius sihteeri Jyrki Kullaa ohjaava opettaja Mika Miettinen puheenjohtaja. Kokouksen
Harjoitustyö - Mikroprosessorit Liikennevalot
 Saku Chydenius tammikuu 2004 Asko Ikävalko Harjoitustyö - Mikroprosessorit Liikennevalot Työn valvoja: Kimmo Saurén RAPORTTI 1(8) 1. Alkuperäinen tehtävänanto 2. Määritelmä valojen vaihtumiselle Muodosta
Saku Chydenius tammikuu 2004 Asko Ikävalko Harjoitustyö - Mikroprosessorit Liikennevalot Työn valvoja: Kimmo Saurén RAPORTTI 1(8) 1. Alkuperäinen tehtävänanto 2. Määritelmä valojen vaihtumiselle Muodosta
OMNIA OPINNÄYTETYÖ AMMATTIOPISTO. Diginoppa ICTP09SLG OMNIAN AMMATTIOPISTO
 OMNIA AMMATTIOPISTO OPINNÄYTETYÖ Diginoppa ICTP09SLG - 2012 OMNIAN AMMATTIOPISTO KOULUTUSALA Tieto- ja tietoliikennetekniikka OPISKELIJA Hannu Junno OHJAAJA Jari Laurila VUOSI 2012 2 TIIVISTELMÄ Opinnäytetyöni
OMNIA AMMATTIOPISTO OPINNÄYTETYÖ Diginoppa ICTP09SLG - 2012 OMNIAN AMMATTIOPISTO KOULUTUSALA Tieto- ja tietoliikennetekniikka OPISKELIJA Hannu Junno OHJAAJA Jari Laurila VUOSI 2012 2 TIIVISTELMÄ Opinnäytetyöni
Liikennevalot. Arduino toimii laitteen aivoina. Arduinokortti on kuin pieni tietokone, johon voit ohjelmoida toimintoja.
 Liikennevalot Laite koostuu Arduinokortista ja koekytkentälevystä. Liikennevalon toiminnat ohjelmoidaan Arduinolle. Ledit ja muut komponentit asetetaan koekytkentälevylle. Arduino toimii laitteen aivoina.
Liikennevalot Laite koostuu Arduinokortista ja koekytkentälevystä. Liikennevalon toiminnat ohjelmoidaan Arduinolle. Ledit ja muut komponentit asetetaan koekytkentälevylle. Arduino toimii laitteen aivoina.
MSnS-extra PCB v1.0. Kevyt käyttöohje
 MSnS-extra PCB v1.0 Kevyt käyttöohje Liittimet 9-napainen pyöreä liitin Tällä liittimellä kytketään kaikki isompaa virrankestoa vaativat signaalit. Liitin on AMP:in valmistama CPC-sarjan vesitiivis versio.
MSnS-extra PCB v1.0 Kevyt käyttöohje Liittimet 9-napainen pyöreä liitin Tällä liittimellä kytketään kaikki isompaa virrankestoa vaativat signaalit. Liitin on AMP:in valmistama CPC-sarjan vesitiivis versio.
OPISKELIJAN MUISTILISTA
 OPISKELIJAN MUISTILISTA Käsityön lukiodiplomi muodostuu käsityötuotteesta tai -teoksesta ja sen syntyä esittävästä portfoliosta. Käsityön lukiodiplomi on yhden lukiokurssin laajuinen kokonaisuus. Ennen
OPISKELIJAN MUISTILISTA Käsityön lukiodiplomi muodostuu käsityötuotteesta tai -teoksesta ja sen syntyä esittävästä portfoliosta. Käsityön lukiodiplomi on yhden lukiokurssin laajuinen kokonaisuus. Ennen
Pienitehoisen keinokuorman suunnittelu ja rakentaminen. AS Automaation ja systeemitekniikan projektityöt Lauri Mäkelä, Henrik Vento 4.2.
 Pienitehoisen keinokuorman suunnittelu ja rakentaminen AS-0.300 Automaation ja systeemitekniikan projektityöt Lauri Mäkelä, Henrik Vento 4..05 Tehtävänanto Pienitehoinen keinokuorma polttokennotutkimusta
Pienitehoisen keinokuorman suunnittelu ja rakentaminen AS-0.300 Automaation ja systeemitekniikan projektityöt Lauri Mäkelä, Henrik Vento 4..05 Tehtävänanto Pienitehoinen keinokuorma polttokennotutkimusta
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt 17.9.2013 4.12.2013. A13 12 Online-mittausten kunnonvalvonta vedenpuhdistusprosessissa (6 op)
") AS-0.3200 Automaatio- ja systeemitekniikan 17.9.2013 4.12.2013 A13 12 Online-mittausten kunnonvalvonta vedenpuhdistusprosessissa (6 op) LOPPURAPORTTI Tekijä: Tomi Lukkarinen Ohjaaja: Mika Kuikka (HSY)
AS-0.3200 Automaatio- ja systeemitekniikan 17.9.2013 4.12.2013 A13 12 Online-mittausten kunnonvalvonta vedenpuhdistusprosessissa (6 op) LOPPURAPORTTI Tekijä: Tomi Lukkarinen Ohjaaja: Mika Kuikka (HSY)
Electric power steering
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Electric power steering Ohjausmoottorin jäähdytys ja ylikuumenemisen esto Projektisuunnitelma 19.9.2014 Työn ohjaaja: Ville Matikainen Tekijät: Samppa
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Electric power steering Ohjausmoottorin jäähdytys ja ylikuumenemisen esto Projektisuunnitelma 19.9.2014 Työn ohjaaja: Ville Matikainen Tekijät: Samppa
Ohjelmiston testaus ja laatu. Ohjelmistotekniikka elinkaarimallit
 Ohjelmiston testaus ja laatu Ohjelmistotekniikka elinkaarimallit Vesiputousmalli - 1 Esitutkimus Määrittely mikä on ongelma, onko valmista ratkaisua, kustannukset, reunaehdot millainen järjestelmä täyttää
Ohjelmiston testaus ja laatu Ohjelmistotekniikka elinkaarimallit Vesiputousmalli - 1 Esitutkimus Määrittely mikä on ongelma, onko valmista ratkaisua, kustannukset, reunaehdot millainen järjestelmä täyttää
PS-vaiheen edistymisraportti Kuopio
 PS-vaiheen edistymisraportti Kuopio Kuopio, PS-vaiheen edistymisraportti, 30.10.2001 Versiohistoria: Versio Pvm Laatija Muutokset 1.0 30.10.2001 Ossi Jokinen Kuopio2001, vain kurssin T-76.115 arvostelun
PS-vaiheen edistymisraportti Kuopio Kuopio, PS-vaiheen edistymisraportti, 30.10.2001 Versiohistoria: Versio Pvm Laatija Muutokset 1.0 30.10.2001 Ossi Jokinen Kuopio2001, vain kurssin T-76.115 arvostelun
Mallintarkistus ja sen
 VERSIO 0.1 LUONNOS Mallintarkistus ja sen soveltaminen PLCohjelmien verifioinnissa AS-0.3200 Automaatio- ja systeemitekniikan projektityöt -projektisuunnitelma Markus Hartikainen 2/1/2009 Sisältö 1. Projektityön
VERSIO 0.1 LUONNOS Mallintarkistus ja sen soveltaminen PLCohjelmien verifioinnissa AS-0.3200 Automaatio- ja systeemitekniikan projektityöt -projektisuunnitelma Markus Hartikainen 2/1/2009 Sisältö 1. Projektityön
PVA-CSK PAVIRO -kuulutuskojesarja
 Viestintäjärjestelmät PVA-CSK PAVIRO -kuulutuskojesarja PVA-CSK PAVIRO -kuulutuskojesarja www.boschsecurity.fi PVA-CSK-kuulutuskojesarja on kuulutuskojeen piirilevy (PCB) PAVIRO-järjestelmälle. Piirilevy
Viestintäjärjestelmät PVA-CSK PAVIRO -kuulutuskojesarja PVA-CSK PAVIRO -kuulutuskojesarja www.boschsecurity.fi PVA-CSK-kuulutuskojesarja on kuulutuskojeen piirilevy (PCB) PAVIRO-järjestelmälle. Piirilevy
Sähköautoprojekti Pienoissähköauto Elektroniikan kokoonpano Moottoriohjain. http://www.elwis.fi
 Sähköautoprojekti Pienoissähköauto Elektroniikan kokoonpano Moottoriohjain http://www.elwis.fi Sisällys Elektroniikan osalista... 3 Tarvittavat työkalut... 3 Elektroniikan rakentaminen... 4 1. Piirilevyn
Sähköautoprojekti Pienoissähköauto Elektroniikan kokoonpano Moottoriohjain http://www.elwis.fi Sisällys Elektroniikan osalista... 3 Tarvittavat työkalut... 3 Elektroniikan rakentaminen... 4 1. Piirilevyn
IDH 125-250-E1. Asennusohje IDH 125-250-E1 / PUHZ Ulkoyksiköt IDH 125-250
 -E1 Asennusohje -E1 / PUHZ Ulkoyksiköt Tämä asennusohje on täydennys ulkoyksiköiden PUHZ ja lämpöpumppukonvektoreiden -yhdistelmille. Järjestelmän kuvaus Ulkoyksikkö: PUHZ-ZRP125 PUHZ-SHW112 PUHZ-RP200
-E1 Asennusohje -E1 / PUHZ Ulkoyksiköt Tämä asennusohje on täydennys ulkoyksiköiden PUHZ ja lämpöpumppukonvektoreiden -yhdistelmille. Järjestelmän kuvaus Ulkoyksikkö: PUHZ-ZRP125 PUHZ-SHW112 PUHZ-RP200
Anturit ja Arduino. ELEC-A4010 Sähköpaja Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka
 Anturit ja Arduino Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka Anturit ja Arduino Luennon sisältö 1. Taustaa 2. Antureiden ominaisuudet 3. AD-muunnos 4. Antureiden lukeminen Arduinolla
Anturit ja Arduino Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka Anturit ja Arduino Luennon sisältö 1. Taustaa 2. Antureiden ominaisuudet 3. AD-muunnos 4. Antureiden lukeminen Arduinolla
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-17 Ikäihmisten kotona asumista tukevien järjestelmien kehittäminen Väliraportti Joonas Aalto-Setälä Ossi Malaska 1. Projektin tavoitteet Projektin
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-17 Ikäihmisten kotona asumista tukevien järjestelmien kehittäminen Väliraportti Joonas Aalto-Setälä Ossi Malaska 1. Projektin tavoitteet Projektin
Taitaja2011, Kuopio Elektronisen laitteen rakentaminen
 Taitaja2011, Kuopio Elektronisen laitteen rakentaminen Johdanto Tässä tehtävässä kootaan ohjeiden mukaan täydellinen elektroninen laite. Laitteen kokoonpanoon kuuluu yksittäisten elektronisten komponenttien
Taitaja2011, Kuopio Elektronisen laitteen rakentaminen Johdanto Tässä tehtävässä kootaan ohjeiden mukaan täydellinen elektroninen laite. Laitteen kokoonpanoon kuuluu yksittäisten elektronisten komponenttien
Hybridivalvomon tilatiedon hallinnan kehittäminen
 AS- 0.3200 Automaatio- ja systeemitekniikan projektityöt 23.9.2014 Projektisuunnitelma Työn suorittaja: Niklas Paganus Työn ohjaaja: Leena Salo Hybridivalvomon tilatiedon hallinnan kehittäminen Sisällysluettelo
AS- 0.3200 Automaatio- ja systeemitekniikan projektityöt 23.9.2014 Projektisuunnitelma Työn suorittaja: Niklas Paganus Työn ohjaaja: Leena Salo Hybridivalvomon tilatiedon hallinnan kehittäminen Sisällysluettelo
LOPPURAPORTTI S13-12 PROSESSIAUTOMAATION TEHTÄVIÄ LUKIOLAISILLE 3OP
 AS0.3200 Automaatio- ja systeemitekniikan projektityöt Aloituspvm: 23.1.2013 Lopetuspvm: 28.5.2013 LOPPURAPORTTI S13-12 PROSESSIAUTOMAATION TEHTÄVIÄ LUKIOLAISILLE 3OP Tekijät: Janne Korhonen Janne Pirttimäki
AS0.3200 Automaatio- ja systeemitekniikan projektityöt Aloituspvm: 23.1.2013 Lopetuspvm: 28.5.2013 LOPPURAPORTTI S13-12 PROSESSIAUTOMAATION TEHTÄVIÄ LUKIOLAISILLE 3OP Tekijät: Janne Korhonen Janne Pirttimäki
2009 Mat-2.4177 Operaatiotutkimuksen Projektityöseminaari L
 2009 Mat-2.4177 Operaatiotutkimuksen Projektityöseminaari L Väliraportti 25.2.2009 Puustokuvioiden korjuukelpoisuus- ja saavutettavuusanalyysi Juha Valvanne Juho Matikainen Joni Nurmentaus Lasse Östring
2009 Mat-2.4177 Operaatiotutkimuksen Projektityöseminaari L Väliraportti 25.2.2009 Puustokuvioiden korjuukelpoisuus- ja saavutettavuusanalyysi Juha Valvanne Juho Matikainen Joni Nurmentaus Lasse Östring
Nokeval No 280701. Käyttöohje. Tekstinäyttö 580-ALF
 Nokeval No 28070 Käyttöohje Tekstinäyttö 580-ALF Nokeval Oy Yrittäjäkatu 2 3700 NOKIA Puh. 03-342 4800 Fax. 03-342 2066 2 Kenttänäytttösarja 580 sarjaviesteille 5820 580 Sarjaviesti RS-232 tai RS-485 PC
Nokeval No 28070 Käyttöohje Tekstinäyttö 580-ALF Nokeval Oy Yrittäjäkatu 2 3700 NOKIA Puh. 03-342 4800 Fax. 03-342 2066 2 Kenttänäytttösarja 580 sarjaviesteille 5820 580 Sarjaviesti RS-232 tai RS-485 PC
Nosturirobotti. robotin tarkoitus. mikä on robotin tehtävä. Kurssin robottiohjelmointi, kesä 2011 harjoitustyö
 Kurssin robottiohjelmointi, kesä 2011 harjoitustyö Juha Hämäläinen ([email protected]) Jussi Jokinen ([email protected]) Videoita robotin toiminnasta: http://www.youtube.com/user/hamismies
Kurssin robottiohjelmointi, kesä 2011 harjoitustyö Juha Hämäläinen ([email protected]) Jussi Jokinen ([email protected]) Videoita robotin toiminnasta: http://www.youtube.com/user/hamismies

Laboratorioraportti 3
 KON-C3004 Kone-ja rakennustekniikan laboratoriotyöt Laboratorioraportti 3 Laboratorioharjoitus 1B: Ruuvijohde Ryhmä S: Pekka Vartiainen 427971 Jari Villanen 69830F Anssi Petäjä 433978 Mittaustilanne Harjoituksessa
KON-C3004 Kone-ja rakennustekniikan laboratoriotyöt Laboratorioraportti 3 Laboratorioharjoitus 1B: Ruuvijohde Ryhmä S: Pekka Vartiainen 427971 Jari Villanen 69830F Anssi Petäjä 433978 Mittaustilanne Harjoituksessa
SUPIKOIRA-projekti. Tommi Berg Eero Alkkiomäki. (Tero Huttunen, Sami Kiiskilä, Ossi Mäkinen, Ilpo Suominen, Mikko Suominen, Asser Vuola)
") SUPIKOIRA-projekti Tommi Berg Eero Alkkiomäki (Tero Huttunen, Sami Kiiskilä, Ossi Mäkinen, Ilpo Suominen, Mikko Suominen, Asser Vuola) Mistä on kyse? Pienoisrakettiharrastus heräämässä Suomessa (SATS,
SUPIKOIRA-projekti Tommi Berg Eero Alkkiomäki (Tero Huttunen, Sami Kiiskilä, Ossi Mäkinen, Ilpo Suominen, Mikko Suominen, Asser Vuola) Mistä on kyse? Pienoisrakettiharrastus heräämässä Suomessa (SATS,
TAITAJA 2006, Elektroniikka (19.1-06/OL) Hakkurivirtalähteen kokoaminen ja testaaminen, Nokia
 Hakkurivirtalähteen kokoaminen ja testaaminen, Nokia") TAITAJA 2006, Elektroniikka (19.1-06/OL) Hakkurivirtalähteen kokoaminen ja testaaminen, Nokia Tehtävän tarkoituksena on koota Nokian tuotannossa käytetyn testiyksikön virtalähdeyksikkö. Kokonainen yksikkö
TAITAJA 2006, Elektroniikka (19.1-06/OL) Hakkurivirtalähteen kokoaminen ja testaaminen, Nokia Tehtävän tarkoituksena on koota Nokian tuotannossa käytetyn testiyksikön virtalähdeyksikkö. Kokonainen yksikkö
A09-05 OSGi IRC Bot For Coffee Maker
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A09-05 OSGi IRC Bot For Coffee Maker Henri Nieminen Juha Sironen 1 Sisältö: 1. Tavoitteiden kertaus 2. Tuloksien esittely 3. Sovelluksen demo 4.
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A09-05 OSGi IRC Bot For Coffee Maker Henri Nieminen Juha Sironen 1 Sisältö: 1. Tavoitteiden kertaus 2. Tuloksien esittely 3. Sovelluksen demo 4.
Matopeli C#:lla. Aram Abdulla Hassan. Ammattiopisto Tavastia. Opinnäytetyö
 Matopeli C#:lla Aram Abdulla Hassan Ammattiopisto Tavastia Opinnäytetyö Syksy 2014 1 Sisällysluettelo 1. Johdanto... 3 2. Projektin aihe: Matopeli C#:lla... 3 3. Projektissa käytetyt menetelmät ja työkalut
Matopeli C#:lla Aram Abdulla Hassan Ammattiopisto Tavastia Opinnäytetyö Syksy 2014 1 Sisällysluettelo 1. Johdanto... 3 2. Projektin aihe: Matopeli C#:lla... 3 3. Projektissa käytetyt menetelmät ja työkalut
Kansallisen vaarallisia kemikaaleja koskevan ohjelman arviointi (KELO-arviointi) Työsuunnitelman esittely Piia Pessala
 Työsuunnitelman esittely Piia Pessala") Kansallisen vaarallisia kemikaaleja koskevan ohjelman arviointi (KELO-arviointi) Työsuunnitelman esittely Piia Pessala 11.1.2012 Työryhmän työn tavoitteet Arvioidaan kansallisen vaarallisia kemikaaleja
Kansallisen vaarallisia kemikaaleja koskevan ohjelman arviointi (KELO-arviointi) Työsuunnitelman esittely Piia Pessala 11.1.2012 Työryhmän työn tavoitteet Arvioidaan kansallisen vaarallisia kemikaaleja
Adafruit Circuit Playground Express
 Adafruit Circuit Playground Express Ulkoiset LEDit ja moottorit Sini Riikonen, [email protected] 6.6.2019 Adafruit Circuit Playground Express / Ledit ja moottorit / 2019 Innokas 1 Yleistä Circuit
Adafruit Circuit Playground Express Ulkoiset LEDit ja moottorit Sini Riikonen, [email protected] 6.6.2019 Adafruit Circuit Playground Express / Ledit ja moottorit / 2019 Innokas 1 Yleistä Circuit
Teknisen työn didaktiikka/aihepiirisuunnittelu Tiina Pyhälahti Syksy 1996 Ohjaaja: Ossi Autio
 Teknisen työn didaktiikka/aihepiirisuunnittelu Tiina Pyhälahti Syksy 1996 Ohjaaja: Ossi Autio 1.JOHDANTO Aihepiirin tavoitteena on valmistaa esine, joka liittyy ilmaan ja entämiseen ja jossa on jokin pienen
Teknisen työn didaktiikka/aihepiirisuunnittelu Tiina Pyhälahti Syksy 1996 Ohjaaja: Ossi Autio 1.JOHDANTO Aihepiirin tavoitteena on valmistaa esine, joka liittyy ilmaan ja entämiseen ja jossa on jokin pienen