Tekijät: Mikael Korpinen Juha Vanhatalo
|
|
|
- Kirsi-Kaisa Pääkkönen
- 9 vuotta sitten
- Katselukertoja:
Transkriptio
1 Tekijät: Mikael Korpinen Juha Vanhatalo AMMATILLISESTI SUUNTAAVA PROJEKTI

2 SISÄLLYSLUETTELO Johdanto... 1 Tuotteen visio... 1 Tuotteen ominaisuudet... 5 Toteutus ja testaus... 9 Kokoamisohjeet Tarvittavat palikat: Robotin kokoaminen osissa: Robotin käyttöohje Toimintaympäristö Käyttö ja ohjaus Tehtävän Haasteellisuus Loppusanat... 16

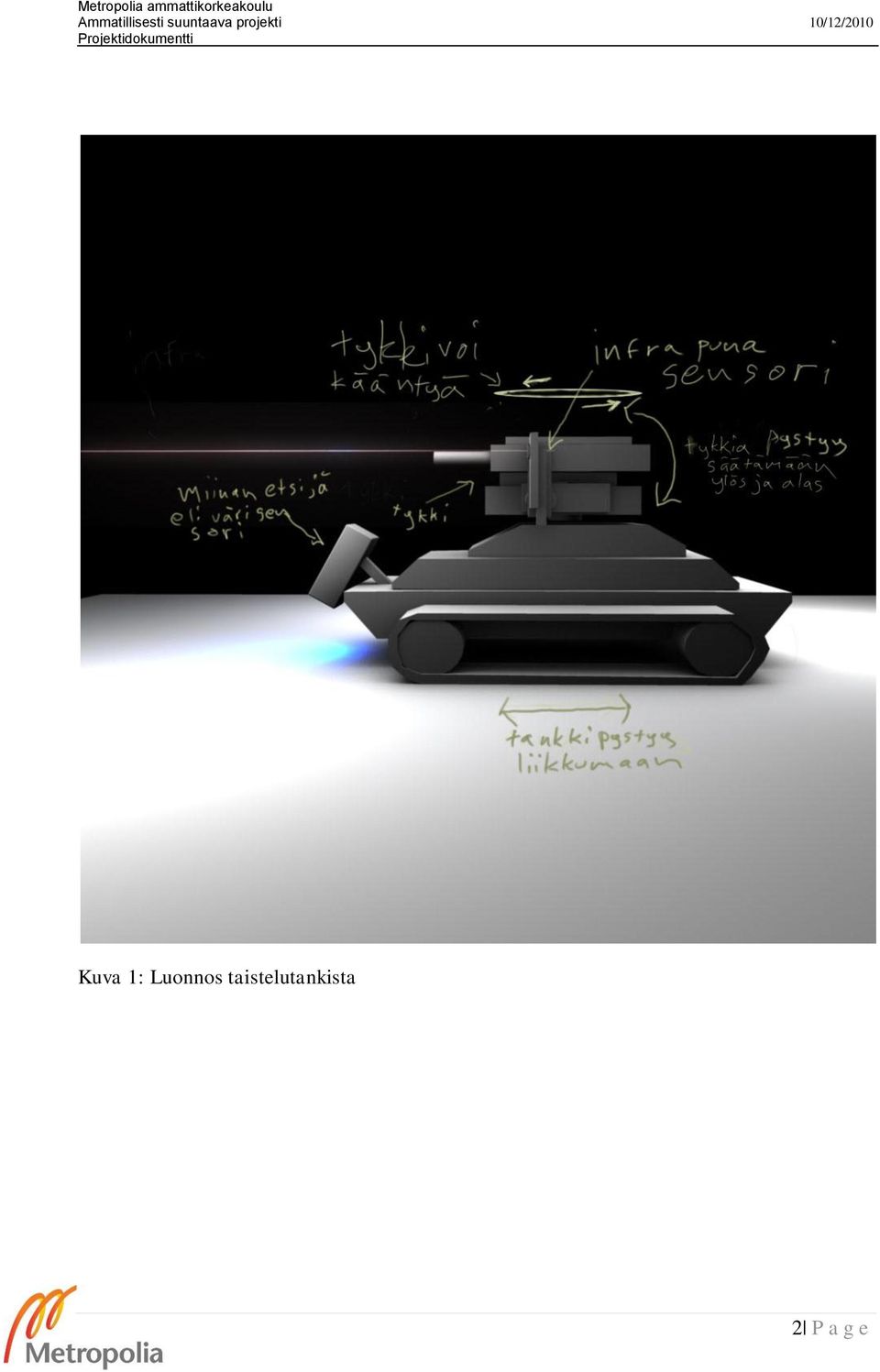
3 JOHDANTO Esiprojektissa saimme tutustua Lego Groupin Mindstorms robottiin. Robotti koostui ohjainyksiköstä NXT sekä kahdesta servomoottorista ja kosketus-, värija etäisyyssensoreista. Teimme pieniä harjoituksia java-ohjelmointikielellä NXT-ohjainyksiköön, sen LeJOS-rajapinnan avulla hyödyntäen moottoreita ja sensoreita. Näin saimme tutustua robotin moottoreihin ja sensoreihin, niiden toimintaan, käyttämiseen ja mahdollisuuksiin ohjelmoinnin kautta. Tämä esiprojekti oli todella hyödyllinen ja herätti kysymyksiä ja ideoita kuten mitä pystymme tekemään? Mikä on mahdollista? Tämän jälkeen saimme tehtäväksi itse ideoida, suunnitella ja toteuttaa robotille suunnittelemamme toiminnallisuudet. Tässä dokumentissa kerrotaan projektistamme ja sen käytännön sovelluksista ja sen aiheuttamista kysymyksistä. Aloitamme ideastamme ja tästä edetään kohti itse toteutusta. TUOTTEEN VISIO Visiomme on semi-automaattisesti toimiva taistelutankki jossa yksi yksikkö ohjaa liikkumista ja toinen itse tykin ohjausta ja toimintaa, kuten ampumista. Kuvassa 1(alempana) on suuntaa antava demonstraatio tankin mallista ja toiminnasta. Tankin on tarkoitus kulkea taistelukentän läpi ennalta annettuun määränpäähän ja ampua matkalla olevia kohteita. Taistelukentällä on kahdenlaisia huomioitavia kohteita: miinoja ja esteitä. Miinat havaitaan värisensorilla ja esteet etäisyyssensorilla. Kaikki esteet paitsi miinat kaatuvat kun niihin osutaan. Taistelukentästä on havainnointikuvat kuvissa 4 ja 5. Päätimme käyttää robotin ohjaamiseen playstationin ohjainpadia. Tähän tarvittavat lisälaitteet ovat saatavilla lisätilauksella ja valmiit rajapinnat playstationin ohjainpadiin ovat valmiina LeJOS-rajapinnassa. Toinen NXTpalikka on yhteydessä playstation ohjaimeen, jolla käyttäjä voi ohjata taistelukentällä liikkumista. Tähän NXT-palikkaan on myös kytketty kaksivärisensoria, jonka avulla tankki etsii miinoja. Miinat ovat tässä tapauksessa punaisia paperin palasia lattialla. Eri valaistusolosuhteet voivat aiheuttaa ongelmia värisensorin käytössä. Tästä syystä värisensorin ympärille oli visiona tehdä pieni varjostin. Varjostuksen avulla tankin olisi ollut tarkoitus nähdä miinat myös kovassa valossa. Miinojen kohdalla tankki pysähtyy, peruuttaa ja kääntyy suunnilleen 90 astetta, jotta miinan ohi ajaminen on enemmän automatisoitua ja helpompaa. Ohjaajan tehtäväksi jää ajaa miinaan ohi. Robotissa olisi navigointijärjestelmä, jotta se tietää missä se sijaitsee. Navigoinnin avulla robotti voisi myös palata lähtöpaikkaansa itsenäisesti. 1 P a g e

4 Kuva 1: Luonnos taistelutankista 2 P a g e
5 Kuva 2Tälläinen robotti tuli Kuva 3Toinen kuvakulma 3 P a g e

6 Kuva 4: Taistelukenttä. Punaiset laput ovat miinoja. Vihreät ja siniset laput ovat ammuttavia esteitä. 4 P a g e

7 Kuva 5 Tällainen kenttä tuli loppujenlopuksi. TUOTTEEN OMINAISUUDET Taistelutankki koostuu kahdesta osasta: tykistä ja kuljetusalustasta. Tykkiin on kiinnitetty kolme moottoria. Yksi kääntelee tykkiä, toinen säätää ampumiskulmaa ja kolmas hoitaa ampumisen. Tykkiin on myös kiinnitetty mediumrange-infrapunasensori ja värisensori havainnointia varten. Tykin ominaisuutena on siis kohteiden ja esteiden etsiminen ja näiden tuhoaminen. Kuljetusalusta sisältää kaksi moottoria ja kaksi värisensoria. Kuljetusalustan tehtävänä on siis etsiä ja varoa miinoja sekä liikuttaa robottia. 5 P a g e

8 Taulukko 1 Robotin ominaisuudet. Ominaisuus Robotin tulee osata havaita miinoja, jotta se ei törmäisi tai ajaisin niiden yli. Robotin pitää pystyä löytämään kohteitaan. Robotin pitää pystyä ampumaan löytämiään kohteita. Testi Robotti lähetetään etenemään miinaa kohti ja varmistutaan siitä, että se pysäyttää moottorit miinan havaitessaan, peruuttaa ja kääntyy pikkaisen automaattisesti. Infrapunasensori mittaa etäisyyksiä ja niiden avulla pitäisi havaita kohde. Pyöritetään infrapunasensoria, ja kun etäisyydessä havaitaan selvä muutos, olisi siinä kohde. Kun ohjaimessa painetaan neliötä, niin robotin tykin tulee pystyä löytämään kohteen reunat ja palata kohteen keskelle varmistuttuaan että kohde on irrallaan ympäristöstä. Eli kun tykki on varmistunut kohteen aitoudesta, niin se palauttaa tähtäyksen löytämänsä kohteen keskelle. Kun robotti on löytänyt kohteen, voidaan sitä ampua ohjaimen avulla. Lisäsimme tankkiin navigointisysteemin dead reckoning -periaatteella, mutta ikäväksi yllätykseksemme huomasimme, että se ei toimi tankkimme tykin, massankeskipisteen, pölyn, telaketjujen ja painon vuoksi. Esim. kun paino on toisella puolella tykin asennon vuoksi voi telaketju sutia. Navigointiin tulee virhettä aivan liian paljon, jotta sitä voisi oikeasti käyttää. 6 P a g e

9 Kahden NXT-palikan välille on toteutettu langaton tiedonsiirto Bluetooth yhteydellä alemmasta ylempään. Tämä näkyy kuvasta 6. Näin voimme ohjata molempia NXT-palikoita yhdellä playstation-ohjaimella. Kuva 6 yksinkertaistettu kuva tiedonkulusta 7 P a g e

10 Tykkiosan NXT-palikkaan toteutetaan automaattinen tähtäys. Tykin muita ominaisuuksia, kuten tykin moottoreita ohjataan myös playstation-ohjaimella. Taistelutankki havainnoi infrapunasensorilla ympäristöä ja ilmaisee etäisyyksiä värisensorin avulla. Värisensori näyttää etäisyyden käyttäjälle erivärisinä valoina. Etäisyyksien ja valojen suhde näkyy taulukosta 2.Vihreästä sinisen kautta punaiseen on sama kuin läheltä kauas. Havaitessaan kohteen ohjaaja voi ampua sitä. Tykissä on siis automaattinen kohteen etsijä, jonka avulla saadaan ammuttua tarkasti tankin infrapunasensorilla löydettyjä kohteita. Taulukko 2 Etäisyydet ilmaistuna värisensorilla. Väri Etäisyysväli (cm) Vihreä 0-15 sinivihreävilkutus 15,1-30 sininen 30,1-45 sinipunaisenvilkutus 45,1-60 punainen 60,1-75 ei valoa > 75 Tykin kulmaa ja rotaatiota pystytään säätämään, jotta voidaan ampua muuallekin kuin eteenpäin. Tämä tekee tykistä järkevämmän, kivemman ja monipuolisemman. Useimmiten tykin liipaisimen painaminen ja kulman säätö on aina ihmisen käsissä, koska ampuminen on kivaa. Jos infrapunasensorin etäisyys olisi pidempi, niin olisimme voineet tehdä vielä kulman ja etäisyyden mittaavan toiminnon, jotta ammus lentäisi kohteeseen asti. Robotissa on viisi moottoria, kolme värisensoria, mediumrange-infrapunasensori sekä playstationohjain ja ohjaimen signaalin vastaanotinsensori. 8 P a g e

11 TOTEUTUS JA TESTAUS Olemme rakentaneet robotista lopullisen version, jolla pääsemme testaamaan liikkumista. Koska meillä oli ongelmia bluetooth-yhteyden kanssa, suuri osa ajasta on mennyt sen ongelman ratkaisemiseen. Jostain syystä tietokoneen NetBeans-ohjelmointityökalulla emme saa ladattua ohjelmistoja langattomasti bluetooth:lla robottiin, vaikka laiteparit on muodostettu. USB-yhteydellä saamme robotin ohjelman kuitenkin ladattua. Tosin testaus ja säätäminen ovat hieman hitaampaa ja hankalampaa. Aluksi suunnittelimme ohjata robottia tietokoneella, joten lähdimme toteuttamaan tietokoneen ja robotin välistä yhteyttä. Yksinkertaisella tekemällämme käyttöliittymällä saimme ohjattua käskyn robottiin. Käyttöliittymä toimi MV-mallin pohjalla tietokoneella, jossa myös bluetooth-yhteyden luonti ja hallinta olivat toteutettuna. Myöhemmin kun saimme Playstation-ohjaimen käyttöömme, aloimme tutkia sen rajapintaa. LeJOS API tarjoaa Playstation-ohjaimen käyttöön muutamat yksinkertaiset valmiit metodit PSPNXController-luokassa. Käytettävät metodit näkyvät taulukossa 3. Taulukko 3 PSPNXController-luokan metodit short getbuttons() Jokainen bitti short:ssa esittää napin boolean-arvoa. (painettu tai ei painettu) byte getleftx() byte getlefty() byte getmode() Palauttaa sensorinnykyisen operointi tavan. byte getrightx() byte getrighty() int powerup(boolean activate) int setadpamode(boolean activate) int setdigitalmode(boolean activate) Haasteena oli yhdistää metodit ja niiden palauttamat arvot ohjaimen napin painalluksiin. Taulukossa 3 nähtävä getbuttons()-metodi palauttaa 16-bittisen short-tyyppisen muuttujan, jossa jokainen bitti esittää jonkin napin booleanarvoa. Eli onko nappi painettu vai ei. getleftx()- ja getlefty()-metodit palauttavat ohjaimen vasemman tatin arvot byte-arvona. getrightx()- ja getrighty()-metodit palauttavat oikean puolen tatin arvot byte-arvona. Hieman ongelmia aiheutti short ja byte muuttujien tulkinta Java:ssa, mutta muuttamalle ne int-tyyppisiksi bittioperaatioilla saimme niistä lopulta selkoa. 9 P a g e

12 Robottimme koostuu kahdesta NXT-palikasta, mutta playstation-ohjaimen vastaanotin voidaan kytkeä vain yhteen NXT-palikkaan. Jotta voisimme ohjata molempia NXT-palikoita, teimme niiden välille langattoman bluetoothyhteyden. Näin saamme ohjattua myös toista osaa epäsuorasti. Alustavasti saimme onnistuneesti testattua kokonaislukujen siirtoa kahden NXT-palikan välillä bluetooth-yhteyden avulla edestakaisin.tästä teimme oman merkinantoprotokollan NXT-palikoiden välille, jotta tykkiosan ohjaus olisi mahdollista. Kuljetusalustan NXT-palikkaan on kytketty ohjaimen vastaanotin. Ohjaimelta vastaanotettu data tulkitaan alaosassa, eli kuljetusalustassa, joka välittää tykin ohjaamiseen liittyvät tiedot yläosaan. Robotin ohjaamiseen liittyvät tiedot tulkitaan suoraan robotin liikuttamiseen alaosassa. Tykin ohjaamiseen liittyvät tiedot tulkitaan yläosassa sovelluspuolella käskyiksi yläosan moottoreille. Robotin liikuttamisen teimme SimpleNavigator- ja Pilot-luokkien rajapintojen avulla. Näin saimme robottiin navigointi-ominaisuuden dead reckoning - periaatteella. Näiden rajapintojen avulla robotti laskee sijaintitietoja servomoottoreiden kierroksien mukaan. Näin robotti voidaan käskeä liikkumaan haluttuihin koordinaatteihin itsestään. Robotin alaosassa olevat kaksi värisensoria etsivät punaista, ettei robotilla voi ajaa niiden yli. Värisensorien toiminta on toteutettu lejos.robotics.colors-rajapinnan avulla. Kun robotti näkee punaista, se tekee automaattisesti pakotetun väistöliikkeen peruuttaen ja kääntyen. Tykkiosa vastaanottaa alaosalta tykin ohjausdataa ja kääntää ne käskyiksi tykin servomoottoreille. Tykin liikuttelu toteutettiin yksinkertaisilla moottorinohjauskäskyillä. Tykkiosassa on myös infrapunasensori, jolla mitataan etäisyyksiä. Tähän toteutimme automaattisen tähtäyksen. Automaattinen tähtäys liikuttaa tykkiosaa hitaasti oikealle ja mittaa etäisyyksiä. Etäisyyksistä päätellään mahdollinen kohde. Kohde tunnistetaan kun etäisyyksissä tapahtuu huomattava muutos. Kun kohde on tunnistettu, tykki kohdistuu kohteen keskiosaan ja antaa äänimerkkinä kaksi piippausta. Tämä automaattinen tähtäys helpottaa huomattavasti kohteeseen osumista, vaikka se onkin hidas. Visiossa mainitun varjostimen hylkäsimme turhana ominaisuutena annetuissa olosuhteissa. 10 P a g e

13 Taulukko 4 Toiminnot ja testit. Ominaisuus Toiminto Testi Testin tulos Aika Bluetooth yhteys Tietokoneen ja NXT-palikan välinen langaton kommunikointi molempiin suuntiin. Tiedonsiirto edestakaisin. kokonaisluvuilla OK JV:3 MK:3 MV-tietorakenne(nykyään käytössä) ei Eri luokkien välinen kommunikointi. Ohjaus Robotin ohjaus playstation ohjaimen avulla. Playstation ohjaimen toiminta. Robottia ohjataan ohjaimen avulla. Bluetooth yhteys kahden NXTpalikan välillä. Langaton tiedonsiirto kahden NXT-palikan välillä edestakaisin. Käyttöliittymä sovelluslogiikan kanssa. toimii Robotti liikkui ohjaimen nappia painamalla. Tutkittu ohjaimen rajapinnan toimintoja ja yhdistetty niitä robotin ohjaamiseen. Tiedonsiirto edestakaisin. kokonaisluvuilla Tykillä ampuminen Pienen pallon ampuminen Tykillä ammutaan kun ohjaimen nappia painetaan. Värisensorien käyttö Värisensorin toiminto Värisensorin havaitessa punaista robotti pysähtyy Behaviour toiminta. ohjelmointimallin Behaviour-toimintojen vaihtelu Ladataan käyttäytymisiä OK Instance-luokan mukaan. tietorakenteeseen ja käynnistetään arbitrator Infrapunasensorin etäisyyksien mittaus ja niiden ilmaisu värisensorin avulla. Kohteiden etsintä toiminto infrapunasensorin avulla. Infrapuna tutkii etäisyyksiä ja etäisyydet käännetään väreiksi tykissä olevaan värisensoriin. Automaattinen tähtäys. Navigation Tankin tulisi osata palata lähtöpaikkaansa. Frenzy mode siirretään kappaleita kauas ja lähelle. Katsotaan palavatko oikeat värit oikeilla etäisyyksillä OK OK OK MK:2 JV:4 MK:2 JV:9 MK:9 OK JV: 5 OK OK OK Kun väri ei pala niin tiedetään OK että kohteita ei ole infrapunasensorin maximi etäisyydellä. Tämän jälkeen painetaan neliötä joka käynnistää kohteiden etsintä moodin. Kun kohde löytyy tulee tykin palata löydetyn kohteen keskelle, nostaa tykkiä hieman ja piipata kahdesti. Painetaan ympyrää ja katsotaan meneekö tankki haluttuun kohtaan. Toiminto epäonnistui tankin painon, massakeskipisteen, telaketjujen ja lian/pölyn vuoksi. fail JV:3 MK:3 JV:2 MK:2 JV:4 MK:6 MK:3 JV:8-10 MK:4-5 JV:2-3 MK: P a g e

14 KOKOAMISOHJEET Tarvittavat palikat: -5 servo moottoria -1 Infrapunasensori -3 värisensoria -2 NXT-palikkaa -Playstation ohjaus setti -Telaketjut -Neljä vannetta -Paljon erilaisia rakennus lego palikoita -Lego palikat osien yhdistämiseen, telaketju systeemiä varten, tykin eli yläosan tukemista varten, ja tykkiin ammusvarastoa varten. Robotin kokoaminen osissa: Ensikisi alusta. Alusta koostuu kahdesta servomoottorista, kahdesta värisensorista, kahdesta NXT-palikasta ja Playstation-vastaanottimesta. Rakennetaan pohja eli kaksi servomoottoria ja lego palikat joilla kaikki yhdistetään jotta voidaan kulkea eteenpäin. Asennetaan NXT-palikka robotin perälle. Etuosaan liitetään playstation-ohjaimen vastaanotin ja kaksi värisensoria. Kun nämä on suoritettu, niin rakennetaan pohjan päälle tukiteline tykille tukemaan robotin yläosaa eli tykkiä kun se pyörii ympäri. Kuva 7 Tankin alaosa Huom! Tukiteline ja osa johon tykki kiinnitetään(keskellä). 12 P a g e

15 Toiseksi yläosa Yläosan rakenne on nähtävissä kuvassa 8. Rakennetaan tykin eli yläosan NXTpalikkaan legopalikoista teline, jolla ensimmäinen moottori saadaan kiinni palikkaan. Tämän jälkeen Tehdään palikoista systeemi, jolla saadaan toinen moottori järkevästi ensimmäiseen moottoriin kiinni. Tämä toinen moottori on se joka hoitaa ampumisen ja ensimmäinen hoitaa tykin kulman säätelyn. Tykin ampujamoottoriin tulisi saada myös kiinnitettyä infrapunasensori niin lähelle tykkiä kuin mahdollista. Tykki tulisi myös saada mahdollisimman alas, jottei tarvitsisi ampua alaviistoon. Kolmas moottori kytketään yläosaan NXT-palikan pohjaan. Tämä voidaan tehdä myös ennen yläosan tykin eli ammunta systeemin kokoamista. Tämän moottorin tulee olla mahdollisimman sivussa sillain että se tasapainottaa toisella puolella olevan tykin painoa ja täten siirtää massan keskipistettä lähemmäksi yläosan palikan ja tankin keskiosaa. Tykki liitetään alustaan ja tykin alamoottorin perä eli se puoli jossa ei ole pyörivää osaa asetetaan nojaamaan alaosa tukitelinettä vasten. Tällä ovelalla systeemillä siirretään suurin osa painosta tukitelineeseen jotta moottorit toimivat paremmin eikä ne hajoa. Tykki ja alusta painavat paljon! Teimme tykkiosan moottoriin joka säätelee kulmaan pienen tasapainottavan vastapainon, jossa on kiinni kaksi rengasta tasapainottamassa moottoriin kohdistuvaa painoa, jotta moottori toimisi herkemmin. Värisensori kiinnitetään palikan toiselle puolelle, eli tässä tapauksessa vasemmalle. Sensorit kuvassa 8 tunnistaa niistä lähtevistä johdoista. Kuva 8 NXT-palikan yläosa eli tykki. Huom! Infrapunasensori tykin vieressä! 13 P a g e

16 ROBOTIN KÄYTTÖOHJE Toimintaympäristö Robotin toimintaympäristöön olemme suunnitelleet ammuttavia kohteita ja miinoja. Miinat ovat lattialla olevia punaisia pahvinpalasia. Robotti toimintaympäristö on nähtävissä kuvasta 5. Kuvassa pystyssä olevat sienet ovat ammuttavia kohteita. Taustalla taas olevat pahvisotilaat ja tankit ovat rekvisiittaa ja harjoitus kohteita jos vierailijat haluavat ammuskella ja kokeilla tankin toimintoja. Käyttö ja ohjaus Robottia ohjataan playstation-ohjaimella. Ohjain on nähtävissä kuvassa 9 ja nappuloita vastaavat toiminnot ovat nähtävissä taulukossa5. Kuva 9 Ohjain. 14 P a g e

17 Taulukko 5 Ohjaimen toiminnot. Ylös Eteenpäin L2 Tykki vasemmalle Vasen Kääntyy vasemmalle R2 Tykki oikealle Oikea Kääntyy oikealle L1 Tykki alas Alas Taaksepäin R1 Tykki ylös Vasen tatti Robotin ohjaus Ampuminen Automaattinen tähtäys Kotiin tulo Oikea tatti Tykin ohjaus TEHTÄVÄN HAASTEELLISUUS Tehtävän haasteina olivat ideoiden muuttaminen toimiviksi. Isona haasteena on ollut toimintojen hahmottaminen ja niiden ohjelmointi annettavassa ajassa. Meillä oli monta kysymystä siitä mitä pystymme tekemään annetussa ajassa ja mitä emme. Teimme tankista monta versiota ja loppujenlopuksi saimme mallin joka oli molempien mielestä toimiva ja esteettisesti miellyttävä. Ehkä isoin ongelma tankkia tehdessämme oli tykin tekeminen. Tykki piti saada mahdollisimman alas ja liikkumaan vapaasti. Kolmen moottorin ja NXTpalikan syystä tykistä tuli painava mikä aiheutti paljon ongelmia niin tähtäyksessä kuin tasapainossa. Piti saada aikaan malli joka ei ole vinossa ja epälooginen. Tankkia koodatessa meillä oli myös hyvää onnea siinä, että ohjaimelle löytyi valmis rajapinta. Tosin sen käyttö vaati paljon testausta ja opettelua. Tankkia koodatessamme huomasimme myös että asetukset kuten nopeus, tähtäyksen tarkkuus ja automaattiset toiminnat vaihtuivat tykin asennon ja pattereiden kulumisen vuoksi. Huomasimme myös, että kun patterit olivat ladattu täyteen niin tankki ei toiminut asettamillamme asetuksilla aluksi. Tämä aiheutti jatkuvaa hienosäätöä. Tämän lisäksi patterit tuntuivat huononevan projektien edistyessä. Kysymykseksi jäi: Johtuiko tämä pattereiden käytöstä ja niiden kulumisesta huonommaksi vai söikö palikoiden väliset yhteydet ja toiminnot loppujen lopuksi niin paljon, että pattereiden tehot eivät riittäneet kuin muutamiksi tunneiksi? Projektin alussa patterit kestivät useita päiviä, mutta lopussa vain muutamia tunteja. Asiaa miettiessämme huomasimme, että alaosa kulutti pattereita vähemmän, vaikka siihen oli kytketty langattoman ohjaimen vastaanotin, kaksi värisensoria, yhteys ylempään NXT-palikkaan ja kaksi moottoria. Myös ohjain tuntui syövän pattereita paljon. Bluetooth yhteyksien 15 P a g e

18 kanssa oli jo alusta asti ongelmia. Tietokoneella ei saatu yhteyttä alempaan palikkaan joten jouduimme tankkaamaan ohjelmiston robottiin. Ylempään palikkaan taas yhteys onnistui paitsi esittelytilaisuudessa, jolloin tietokone otti yläpalikkamme sijaan yhteyden ope nimiseen kohteeseen. Tämä ongelma jäi auki. Mikä oli se ope laite? Miksi yhteys muodostui juuri tähän? Aiheuttiko se että oli niin monta robottia ja tietokonetta kerralla luokassa ja tämän vuoksi otti yhteyden johonkin vanhaan ope laitteeseen? Vai oliko ope kyseenomaisen palikan entinen nimi? LOPPUSANAT Vasta tankin rakennettuamme aloimme ymmärtää mitä kaikkea olisimme voineet tehdä ja mitkä olisivat hienoja lisä ominaisuuksia. Loppujenlopuksi onnistuimme mielestämme erittäin hyvin lukuun ottamatta navigoinnin epäonnistumista. Emme ikinä olisi onnistuneet tehtävässä ilman onnistunutta ryhmätyötä ja kommunikointia. Lisäksi teimme jotain uutta ja vietiin kehitystä kurssin puolelta eteenpäin. Otimme riskin ja onnistuimme. Projektin tekeminen oli hauskaa ja haastavaa. Jos aikaa olisi ollut enemmän, olisimme voineet tehdä myös kehittyneemmän kohteenetsintäalgoritmin. Tämän puuttuminen jäi harmittamaan. Kiitokset opettajille ja ryhmäläisille kaikesta. Ilman opettajien antamaa materiaalia ja opiskelijoiden antamaa palautetta olisi ollut vaikeata onnistua hyvin kyseenomaisesta tehtävästä annetussa ajassa. Tämä ammatillisesti suuntaava projekti on ollut ehkä mielenkiintoisimpia ja antoisampia kursseja tähän asti. Oli mielenkiintoista nähdä myös mitä kaikki muut saivat aikaan ja miten. 16 P a g e

Lego Mindstorms NXT. OPH oppimisympäristöjen kehittämishanke 2011-2013. (C) 2012 Oppimiskeskus Innokas! All Rights Reserved 1
 2012 Oppimiskeskus Innokas! All Rights Reserved 1") Lego Mindstorms NXT OPH oppimisympäristöjen kehittämishanke 2011-2013 (C) 2012 Oppimiskeskus Innokas! All Rights Reserved 1 Anturi- ja moottoriportit A B C 1 2 3 4 (C) 2012 Oppimiskeskus Innokas! All Rights
Lego Mindstorms NXT OPH oppimisympäristöjen kehittämishanke 2011-2013 (C) 2012 Oppimiskeskus Innokas! All Rights Reserved 1 Anturi- ja moottoriportit A B C 1 2 3 4 (C) 2012 Oppimiskeskus Innokas! All Rights
NXT Infrapuna-sensori
 NXT Infrapuna-sensori Joissakin tilanteissa on hyödyllistä, jos robotti tunnistaa ympäristöstä tulevaa infrapunavaloa. Tämä tieto on välttämätön esim. RCJ:n robottijalkapallossa. Tässä esitellään vain
NXT Infrapuna-sensori Joissakin tilanteissa on hyödyllistä, jos robotti tunnistaa ympäristöstä tulevaa infrapunavaloa. Tämä tieto on välttämätön esim. RCJ:n robottijalkapallossa. Tässä esitellään vain
BL40A1810 Mikroprosessorit, harjoitus 1
 BL40A1810 Mikroprosessorit, harjoitus 1 Käytettävä laitteisto Kurssin opetuslaitteistona käytetään Legon MINDSTORMS laitteita, jonka pääosia ovat ohjelmoitava NXT-yksikkö (Atmel ARM7, 64k RAM, 256k Flash),
BL40A1810 Mikroprosessorit, harjoitus 1 Käytettävä laitteisto Kurssin opetuslaitteistona käytetään Legon MINDSTORMS laitteita, jonka pääosia ovat ohjelmoitava NXT-yksikkö (Atmel ARM7, 64k RAM, 256k Flash),
TIEA343 - Robottiohjelmointi 2011
 Samuli Rahkonen 6.7.2011 TIEA343 - Robottiohjelmointi 2011 Tämä on Jyväskylän yliopistossa järjestetyn robottiohjelmointikurssin harjoitustyön dokumentaatio. Robotin tarkoitus Robotin tarkoitus on ampua
Samuli Rahkonen 6.7.2011 TIEA343 - Robottiohjelmointi 2011 Tämä on Jyväskylän yliopistossa järjestetyn robottiohjelmointikurssin harjoitustyön dokumentaatio. Robotin tarkoitus Robotin tarkoitus on ampua
HiTechnic -kompassisensorin käyttäminen NXT-G -ympäristössä
 NXT -kompassisensori NXT -roboteihin on saatavilla kahdenlaisia kompasseja: Wiltronics kompassit (tilaukset: http://www.wiltronics.com.au/) ja HiTechnic kompassit (NMC1034 Compass) (tilaukset: http://www.hitechnic.com/products).
NXT -kompassisensori NXT -roboteihin on saatavilla kahdenlaisia kompasseja: Wiltronics kompassit (tilaukset: http://www.wiltronics.com.au/) ja HiTechnic kompassit (NMC1034 Compass) (tilaukset: http://www.hitechnic.com/products).
Scratch ohjeita. Perusteet
 Perusteet Scratch ohjeita Scratch on graafinen ohjelmointiympäristö koodauksen opetteluun. Se soveltuu hyvin alakouluista yläkouluunkin asti, sillä Scratchin käyttömahdollisuudet ovat monipuoliset. Scratch
Perusteet Scratch ohjeita Scratch on graafinen ohjelmointiympäristö koodauksen opetteluun. Se soveltuu hyvin alakouluista yläkouluunkin asti, sillä Scratchin käyttömahdollisuudet ovat monipuoliset. Scratch
Tämä toimii Kuhan koulu 3.lk, Ranua
 Tämä toimii Kuhan koulu 3.lk, Ranua Julia Petäjäjärvi, Niko Romppainen, Elias Ilvesluoto ja Taneli Luokkanen TÄMÄ TOIMII 14.3.2005 Meidän Tämä toimii - ryhmässämme on Taneli, Julia, Elias ja Niko. Aluksi
Tämä toimii Kuhan koulu 3.lk, Ranua Julia Petäjäjärvi, Niko Romppainen, Elias Ilvesluoto ja Taneli Luokkanen TÄMÄ TOIMII 14.3.2005 Meidän Tämä toimii - ryhmässämme on Taneli, Julia, Elias ja Niko. Aluksi
Ohjelmointi Lego Mindstorms EV3- ympäristössä
 Ohjelmointi Lego Mindstorms EV3- ympäristössä TeHtäväkortit Lohjan kaupunki, Timo Pietiläinen 1 Miten tehtäväkortteja käytetään? Tehtäväkortit on laadittu siten, että tehtävä esitellään omalla diallaan.
Ohjelmointi Lego Mindstorms EV3- ympäristössä TeHtäväkortit Lohjan kaupunki, Timo Pietiläinen 1 Miten tehtäväkortteja käytetään? Tehtäväkortit on laadittu siten, että tehtävä esitellään omalla diallaan.
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS ROBOTIIKKA TEKOÄLYN GRAND CHALLENGE YHDISTÄÄ LÄHES KAIKKI TEKOÄLYN OSA-ALUEET: ROBOTIIKKA TEKOÄLYN GRAND CHALLENGE YHDISTÄÄ LÄHES KAIKKI TEKOÄLYN OSA-ALUEET: AKTUAATTORIT:
JOHDATUS TEKOÄLYYN TEEMU ROOS ROBOTIIKKA TEKOÄLYN GRAND CHALLENGE YHDISTÄÄ LÄHES KAIKKI TEKOÄLYN OSA-ALUEET: ROBOTIIKKA TEKOÄLYN GRAND CHALLENGE YHDISTÄÄ LÄHES KAIKKI TEKOÄLYN OSA-ALUEET: AKTUAATTORIT:
Bluetooth-yhteyden vianmääritys EV3:ssa
 Bluetooth-yhteyden vianmääritys EV3:ssa Yleisiä huomautuksia Varmista, että EV3 Brick -palikan iphone/ipad-toiminto on poistettu käytöstä, kun haluat käyttää Bluetooth-yhteyttä LEGO MINDSTORMS EV3 Home
Bluetooth-yhteyden vianmääritys EV3:ssa Yleisiä huomautuksia Varmista, että EV3 Brick -palikan iphone/ipad-toiminto on poistettu käytöstä, kun haluat käyttää Bluetooth-yhteyttä LEGO MINDSTORMS EV3 Home
Siltaaminen: Piaget Matematiikka Inductive Reasoning OPS Liikennemerkit, Eläinten luokittelu
 Harjoite 2 Tavoiteltava toiminta: Materiaalit: Eteneminen: TUTUSTUTAAN OMINAISUUS- JA Toiminnan tavoite ja kuvaus: SUHDETEHTÄVIEN TUNNISTAMISEEN Kognitiivinen taso: IR: Toiminnallinen taso: Sosiaalinen
Harjoite 2 Tavoiteltava toiminta: Materiaalit: Eteneminen: TUTUSTUTAAN OMINAISUUS- JA Toiminnan tavoite ja kuvaus: SUHDETEHTÄVIEN TUNNISTAMISEEN Kognitiivinen taso: IR: Toiminnallinen taso: Sosiaalinen
Lego Mindstorms NXT robottien etenemissuunnitelma
 Lego Mindstorms NXT robottien etenemissuunnitelma Ohjelmointi on yleisesti koettu luokanopettajien keskuudessa erääksi merkittävimmiksi uudistuksiksi, joita OPS 2016 tarjoaa. Tässä oppaassa on meidän koulumme
Lego Mindstorms NXT robottien etenemissuunnitelma Ohjelmointi on yleisesti koettu luokanopettajien keskuudessa erääksi merkittävimmiksi uudistuksiksi, joita OPS 2016 tarjoaa. Tässä oppaassa on meidän koulumme
Ole hyvä ja lue tämä käyttöohje ennen käyttöönottoa
 Käyttöohje LANGATON ÄÄNIJÄRJESTELMÄ Ole hyvä ja lue tämä käyttöohje ennen käyttöönottoa 1 OSIEN SIJAINTI 1. DISKANTTITASON SÄÄTÖ 9. TASAVIRRAN SISÄÄNTULO 2. BASSONTASON SÄÄTÖ 10. AUX SISÄÄNTULO 3,5MM LIITIN
Käyttöohje LANGATON ÄÄNIJÄRJESTELMÄ Ole hyvä ja lue tämä käyttöohje ennen käyttöönottoa 1 OSIEN SIJAINTI 1. DISKANTTITASON SÄÄTÖ 9. TASAVIRRAN SISÄÄNTULO 2. BASSONTASON SÄÄTÖ 10. AUX SISÄÄNTULO 3,5MM LIITIN
KÄYTTÖOHJE HIRVIMATIC (2V0) 5.5.2010
 5.5.2010") 1 KÄYTTÖOHJE HIRVIMATIC (2V0) 5.5.2010 NÄPPÄIMISTÖ: Ohjelman valinta Asetukset /nollaus Ajastimen valinta (Ei vielä käytössä) Ohjaus oikealle / lisää asetusta / ajastimen käynnistys Seis / valinnan vahvistus
1 KÄYTTÖOHJE HIRVIMATIC (2V0) 5.5.2010 NÄPPÄIMISTÖ: Ohjelman valinta Asetukset /nollaus Ajastimen valinta (Ei vielä käytössä) Ohjaus oikealle / lisää asetusta / ajastimen käynnistys Seis / valinnan vahvistus
Etupaneeli. ON LINE valo on sammunut jos virhetila tai painettu PAUSE. Näytöllä lukee ON LINE => tulostin on valmis
 Toshiba B-SA4T opas Etupaneeli ON LINE valo on sammunut jos virhetila tai painettu PAUSE FEED:llä saa yhden tyhjän tarran tai viimeksi tulostuneen tarran uudelleen (asetettava huoltomenusta) Kuva muovikuorisen
Toshiba B-SA4T opas Etupaneeli ON LINE valo on sammunut jos virhetila tai painettu PAUSE FEED:llä saa yhden tyhjän tarran tai viimeksi tulostuneen tarran uudelleen (asetettava huoltomenusta) Kuva muovikuorisen
P6SLite ohjaus- ja zoom komennot
 1, Ohjaus zoom -toiminnot P6SLite ohjaus- ja zoom komennot Osa 1 pikanäppäintoiminnon Valitse APP-käyttöliittymää ja APP ilmestyy toimintopainikkeeseen. Paina + = ZOOM +, paina - = ZOOM-. 2, Manuaalinen
1, Ohjaus zoom -toiminnot P6SLite ohjaus- ja zoom komennot Osa 1 pikanäppäintoiminnon Valitse APP-käyttöliittymää ja APP ilmestyy toimintopainikkeeseen. Paina + = ZOOM +, paina - = ZOOM-. 2, Manuaalinen
Nuorten liikunnallisen aktiivisuuden lisääminen projekti. Johanna Korkala johanna.korkala@eduouka.fi. FirstStep. FA20 Aktiivisuusmittari
 Nuorten liikunnallisen aktiivisuuden lisääminen projekti Johanna Korkala johanna.korkala@eduouka.fi FirstStep FA20 Aktiivisuusmittari AKTIIVISUUSMITTARI Päivittäisellä liikkumisella on tutkitusti terveyttä
Nuorten liikunnallisen aktiivisuuden lisääminen projekti Johanna Korkala johanna.korkala@eduouka.fi FirstStep FA20 Aktiivisuusmittari AKTIIVISUUSMITTARI Päivittäisellä liikkumisella on tutkitusti terveyttä
Matopeli C#:lla. Aram Abdulla Hassan. Ammattiopisto Tavastia. Opinnäytetyö
 Matopeli C#:lla Aram Abdulla Hassan Ammattiopisto Tavastia Opinnäytetyö Syksy 2014 1 Sisällysluettelo 1. Johdanto... 3 2. Projektin aihe: Matopeli C#:lla... 3 3. Projektissa käytetyt menetelmät ja työkalut
Matopeli C#:lla Aram Abdulla Hassan Ammattiopisto Tavastia Opinnäytetyö Syksy 2014 1 Sisällysluettelo 1. Johdanto... 3 2. Projektin aihe: Matopeli C#:lla... 3 3. Projektissa käytetyt menetelmät ja työkalut
SUMO-ROBOTTI. Tehtävä
 SUMO-ROBOTTI Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla yksinkertainen Sumorobotti. Robotti ohjelmoidaan liikkumaan autonomisesti (ilman ohjausta) ja tunnistamaan mustan ottelualustan
SUMO-ROBOTTI Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla yksinkertainen Sumorobotti. Robotti ohjelmoidaan liikkumaan autonomisesti (ilman ohjausta) ja tunnistamaan mustan ottelualustan
Comet pysäköintimittarin asennus ja kytkeminen tietokoneeseesi (Windows XP) USB-kaapelilla.
 USB-kaapelilla.") Comet pysäköintimittarin asennus ja kytkeminen tietokoneeseesi (Windows XP) USB-kaapelilla. HUOM! TÄMÄ OHJE ON COMET LAITTEEN ENSIMMÄISTÄ ASENNUSKERTAA VARTEN. Ladataksesi rahaa Comet pysäköintimittariisi
Comet pysäköintimittarin asennus ja kytkeminen tietokoneeseesi (Windows XP) USB-kaapelilla. HUOM! TÄMÄ OHJE ON COMET LAITTEEN ENSIMMÄISTÄ ASENNUSKERTAA VARTEN. Ladataksesi rahaa Comet pysäköintimittariisi
CO 2 -anturi. Langaton. Käyttöohje. -fi. Englannin kielestä käännetty asiakirja 2014-04-22 A001
 CO 2 -anturi Langaton Englannin kielestä käännetty asiakirja -fi 2014-04-22 A001 Sisällysluettelo 1 Tuotteen kuvaus... 1 1.1 CO 2-mittaus... 1 2 Asennusohjeet... 2 3 Käyttöliittymän kuvaus... 3 3.1 Liitännät...
CO 2 -anturi Langaton Englannin kielestä käännetty asiakirja -fi 2014-04-22 A001 Sisällysluettelo 1 Tuotteen kuvaus... 1 1.1 CO 2-mittaus... 1 2 Asennusohjeet... 2 3 Käyttöliittymän kuvaus... 3 3.1 Liitännät...
S14 09 Sisäpeltorobotti AS Automaatio ja systeemitekniikan projektityöt. Antti Kulpakko, Mikko Ikonen
 S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
Eye Pal Solo. Käyttöohje
 Eye Pal Solo Käyttöohje 1 Eye Pal Solon käyttöönotto Eye Pal Solon pakkauksessa tulee kolme osaa: 1. Peruslaite, joka toimii varsinaisena lukijana ja jonka etureunassa on laitteen ohjainpainikkeet. 2.
Eye Pal Solo Käyttöohje 1 Eye Pal Solon käyttöönotto Eye Pal Solon pakkauksessa tulee kolme osaa: 1. Peruslaite, joka toimii varsinaisena lukijana ja jonka etureunassa on laitteen ohjainpainikkeet. 2.
perustelu Noudatetaan sääntöjä. Opetuskortit (tehtävät 16 28), palikoita, supermarketin pohjapiirustus, nuppineuloja, tangram-palat
, palikoita, supermarketin pohjapiirustus, nuppineuloja, tangram-palat") Harjoitus 12: INDUKTIIVISEN PÄÄTTELYN KERTAUS Tavoiteltava toiminta: Kognitiivinen taso: Ominaisuuksien ja suhteiden kertaus Toiminnan tavoite ja kuvaus: Oppilaat ratkaisevat paperi- ja palikkatehtäviä
Harjoitus 12: INDUKTIIVISEN PÄÄTTELYN KERTAUS Tavoiteltava toiminta: Kognitiivinen taso: Ominaisuuksien ja suhteiden kertaus Toiminnan tavoite ja kuvaus: Oppilaat ratkaisevat paperi- ja palikkatehtäviä
Air Sync Käyttöopas. Air Syncin lataaminen. Virran kytkentä ja katkaisu On/Off Air Sync
 Air Sync Käyttöopas Air Syncin lataaminen 1. Liitä Air Syncin Micro USB-liitin (D) tietokoneeseesi tai muuhun vastaavaan latauslaitteeseen käyttämällä mukana tullutta USB-kaapelia tai vastaavaa Micro USBliitintä.
Air Sync Käyttöopas Air Syncin lataaminen 1. Liitä Air Syncin Micro USB-liitin (D) tietokoneeseesi tai muuhun vastaavaan latauslaitteeseen käyttämällä mukana tullutta USB-kaapelia tai vastaavaa Micro USBliitintä.
Profset Pro10 -käyttöopas
 Profset Pro10 -käyttöopas Onneksi olkoon! Olet hankkinut ammattitason matkapuhelinkuulokkeen huippuluokan taustamelun poistomikrofonilla. Pakkauksen sisältö Pakkaus sisältää Profset Pro10- kuulokkeen,
Profset Pro10 -käyttöopas Onneksi olkoon! Olet hankkinut ammattitason matkapuhelinkuulokkeen huippuluokan taustamelun poistomikrofonilla. Pakkauksen sisältö Pakkaus sisältää Profset Pro10- kuulokkeen,
Contour Mouse Wireless käyttöohje. /1 Contour Mouse Wireless käyttöohje
 Käyttöohje 4 Pakkauksen sisältö 1. Contour Mouse 2. Langaton vastaanotin 3. USB 2.0 -kaapeliadapteri 4. USB/Micro-USB-kaapeli 5. Käyttöohje 2 3 Yläosan toiminnot Oikea painike 5 5 Contour Mouse Keskipainike
Käyttöohje 4 Pakkauksen sisältö 1. Contour Mouse 2. Langaton vastaanotin 3. USB 2.0 -kaapeliadapteri 4. USB/Micro-USB-kaapeli 5. Käyttöohje 2 3 Yläosan toiminnot Oikea painike 5 5 Contour Mouse Keskipainike
Tutustu Daisy-soittimeen!
 Tutustu Daisy-soittimeen! Daisy-julkaisut Äänikirjat, -lehdet, oppaat, tiedotteet Äänen lisäksi kuvia, piirroksia, taulukoita Tiedostot MP3-muotoisia Jakelu CD-levyillä tai verkon kautta Daisy-julkaisuja
Tutustu Daisy-soittimeen! Daisy-julkaisut Äänikirjat, -lehdet, oppaat, tiedotteet Äänen lisäksi kuvia, piirroksia, taulukoita Tiedostot MP3-muotoisia Jakelu CD-levyillä tai verkon kautta Daisy-julkaisuja
Paikantavan turvapuhelimen käyttöohje
 Paikantavan turvapuhelimen käyttöohje Stella Turvapuhelin ja Hoiva Oy Tämä ohje kertoo miten paikantavaa turvapuhelinta käytetään Stella Turvapuhelin ja Hoiva Oy Mannerheimintie 164 00300 Helsinki Sisällysluettelo
Paikantavan turvapuhelimen käyttöohje Stella Turvapuhelin ja Hoiva Oy Tämä ohje kertoo miten paikantavaa turvapuhelinta käytetään Stella Turvapuhelin ja Hoiva Oy Mannerheimintie 164 00300 Helsinki Sisällysluettelo
S11-09 Control System for an. Autonomous Household Robot Platform
 S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
LoCCaM. LoCCaM Cam laitteiston ohjaaminen. Dimag Ky dimag.fi
 LoCCaM LoCCaM Cam laitteiston ohjaaminen Dimag Ky janne.koski @ dimag.fi +358505907788 Laitteen lisääminen sovellukseen Sovelluksen pääsivulta valitaan oikeasta yläkulman valikosta Aloita uusi (1) Aukeavaan
LoCCaM LoCCaM Cam laitteiston ohjaaminen Dimag Ky janne.koski @ dimag.fi +358505907788 Laitteen lisääminen sovellukseen Sovelluksen pääsivulta valitaan oikeasta yläkulman valikosta Aloita uusi (1) Aukeavaan
Kosteusanturi Langaton
 Kosteusanturi Langaton Englannin kielestä käännetty asiakirja -fi 2014-04-22 A001 Sisällysluettelo 1 Tuotteen kuvaus... 1 1.1 Kosteusmittaus... 1 2 Asennusohjeet... 2 3 Käyttöliittymän kuvaus... 2 3.1
Kosteusanturi Langaton Englannin kielestä käännetty asiakirja -fi 2014-04-22 A001 Sisällysluettelo 1 Tuotteen kuvaus... 1 1.1 Kosteusmittaus... 1 2 Asennusohjeet... 2 3 Käyttöliittymän kuvaus... 2 3.1
LHV325 Ohjelmoinnin perusteet. WorkBook. Jussi Tapio Kuosa
 LHV325 Ohjelmoinnin perusteet WorkBook Jussi Tapio Kuosa Versiohistoria: 5.12.2013 Versio 1.0 (ensimmäinen versio) Lataa ohjeita työkirjaan liittyen Sisällys T02* Työkaluihin tutustumista ja työkalujen
LHV325 Ohjelmoinnin perusteet WorkBook Jussi Tapio Kuosa Versiohistoria: 5.12.2013 Versio 1.0 (ensimmäinen versio) Lataa ohjeita työkirjaan liittyen Sisällys T02* Työkaluihin tutustumista ja työkalujen
S-114.2720 Havaitseminen ja toiminta
 S-114.2720 Havaitseminen ja toiminta Heikki Hyyti 60451P Harjoitustyö 2 visuaalinen prosessointi Treismanin FIT Kuva 1. Kuvassa on Treismanin kokeen ensimmäinen osio, jossa piti etsiä vihreätä T kirjainta.
S-114.2720 Havaitseminen ja toiminta Heikki Hyyti 60451P Harjoitustyö 2 visuaalinen prosessointi Treismanin FIT Kuva 1. Kuvassa on Treismanin kokeen ensimmäinen osio, jossa piti etsiä vihreätä T kirjainta.
Autotallin ovi - Tehtävänanto
 Autotallin ovi - Tehtävänanto Pisteytys (max 9p): 1 piste per läpi mennyt testi (max 7p) Reflektointitehtävä (max 2p yksi piste jos osaa vastata edes osittain ja toinen piste tyhjentävästä vastauksesta)
Autotallin ovi - Tehtävänanto Pisteytys (max 9p): 1 piste per läpi mennyt testi (max 7p) Reflektointitehtävä (max 2p yksi piste jos osaa vastata edes osittain ja toinen piste tyhjentävästä vastauksesta)
Nosturirobotti. robotin tarkoitus. mikä on robotin tehtävä. Kurssin robottiohjelmointi, kesä 2011 harjoitustyö
 Kurssin robottiohjelmointi, kesä 2011 harjoitustyö Juha Hämäläinen (juha.h.hamalainen@jyu.fi) Jussi Jokinen (jussi.p.p.jokinen@jyu.fi) Videoita robotin toiminnasta: http://www.youtube.com/user/hamismies
Kurssin robottiohjelmointi, kesä 2011 harjoitustyö Juha Hämäläinen (juha.h.hamalainen@jyu.fi) Jussi Jokinen (jussi.p.p.jokinen@jyu.fi) Videoita robotin toiminnasta: http://www.youtube.com/user/hamismies
Toimintaperiaate: 2. Kytke virta vastaanottimeen käyttämällä virtalaitetta, jossa on merkintä "horsealarm receiver only".
 Toimintaperiaate: 1. Kytke virta toistimeen käyttämällä virtalaitetta, jossa on merkintä "RadioLink only". Kun virta on kytketty toistimeen, laitteen vihreä valo välähtää. 2. Kytke virta vastaanottimeen
Toimintaperiaate: 1. Kytke virta toistimeen käyttämällä virtalaitetta, jossa on merkintä "RadioLink only". Kun virta on kytketty toistimeen, laitteen vihreä valo välähtää. 2. Kytke virta vastaanottimeen
Käyttöohje BTGP-38KM Bluetooth GPS Data Logger V1.0
 Käyttöohje BTGP-38KM Bluetooth GPS Data Logger V1.0 I Johdanto 1. Yhteenveto BTGP-38KM Data Logger yhdistää kehittyneet Bluetooth- ja GPS-teknologiat yhteen tuotteeseen. Bluetooth-teknologia mahdollistaa
Käyttöohje BTGP-38KM Bluetooth GPS Data Logger V1.0 I Johdanto 1. Yhteenveto BTGP-38KM Data Logger yhdistää kehittyneet Bluetooth- ja GPS-teknologiat yhteen tuotteeseen. Bluetooth-teknologia mahdollistaa
DNA Prepaid WLAN Mokkula
 DNA Prepaid WLAN Mokkula Mokkula käyttää normaalikokoista / suurempaa SIM-korttia. Irrota SIM-kortti kokonaisena ja laita se Mokkulaan alla olevan kuvan mukaisesti. Jos irrotat vahingossa pienemmän SIM-kortin,
DNA Prepaid WLAN Mokkula Mokkula käyttää normaalikokoista / suurempaa SIM-korttia. Irrota SIM-kortti kokonaisena ja laita se Mokkulaan alla olevan kuvan mukaisesti. Jos irrotat vahingossa pienemmän SIM-kortin,
sivu 1 Verkkopäätteen muuttaminen Anvian uuteen tekniikkaan Ohje käy seuraaviin verkkopäätteisiin
 sivu 1 Verkkopäätteen muuttaminen Anvian uuteen tekniikkaan Ohje käy seuraaviin verkkopäätteisiin Zyxel Prestige 645 ISP Zyxel Prestige 645 WEB Zyxel Prestige 645R Zyxel Prestige 645 Ennen aloitusta tarkista,
sivu 1 Verkkopäätteen muuttaminen Anvian uuteen tekniikkaan Ohje käy seuraaviin verkkopäätteisiin Zyxel Prestige 645 ISP Zyxel Prestige 645 WEB Zyxel Prestige 645R Zyxel Prestige 645 Ennen aloitusta tarkista,
Äänellä vauhtia robottiin
 Äänellä vauhtia robottiin Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla robotti, joka väistää esteitä ja kulkee sitä nopeampaa mitä kovempi ääni sen lähistöllä on. Robotti tunnistaa esteet
Äänellä vauhtia robottiin Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla robotti, joka väistää esteitä ja kulkee sitä nopeampaa mitä kovempi ääni sen lähistöllä on. Robotti tunnistaa esteet
Käyttöopas kahden kameran väliseen tiedostojen siirtoon
 Canon-digitaalikamera Käyttöopas kahden kameran väliseen tiedostojen siirtoon Sisällysluettelo Johdanto....................................... 1 Kuvien siirtäminen langattomassa yhteydessä........ 2 Kameran
Canon-digitaalikamera Käyttöopas kahden kameran väliseen tiedostojen siirtoon Sisällysluettelo Johdanto....................................... 1 Kuvien siirtäminen langattomassa yhteydessä........ 2 Kameran
Uusi FWB500 ilmakiväärisi on toimitettu tehdaspakkauksessa, jota voit käyttää jatkossa säilytys- ja kantolaukkuna.
 KÄYTTÖOHJE FEINWERKBAU 500 ILMAKIVÄÄRI Ennen aseen käyttöä Lue tämä käyttöohje huolellisesti ja säilytä se myöhempää käyttöä varten. Aseesi toimii moitteettomasti vain jos käsittelet sitä oikein ja huollat
KÄYTTÖOHJE FEINWERKBAU 500 ILMAKIVÄÄRI Ennen aseen käyttöä Lue tämä käyttöohje huolellisesti ja säilytä se myöhempää käyttöä varten. Aseesi toimii moitteettomasti vain jos käsittelet sitä oikein ja huollat
Bluetooth-yksikkö BU-20 Tulostusopas. Sisällys Ennen käyttöä...2 Varotoimet...3 Tulostaminen...4
 Bluetooth-yksikkö BU-20 Tulostusopas Sisällys Ennen käyttöä......................................2 Varotoimet.........................................3 Tulostaminen.......................................4
Bluetooth-yksikkö BU-20 Tulostusopas Sisällys Ennen käyttöä......................................2 Varotoimet.........................................3 Tulostaminen.......................................4
Kenguru 2013 Benjamin sivu 1 / 7 (6. ja 7. luokka) yhteistyössä Pakilan ala-asteen kanssa
 yhteistyössä Pakilan ala-asteen kanssa") Kenguru 2013 Benjamin sivu 1 / 7 Nimi Ryhmä Pisteet: Kenguruloikan pituus: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto. Väärästä vastauksesta
Kenguru 2013 Benjamin sivu 1 / 7 Nimi Ryhmä Pisteet: Kenguruloikan pituus: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto. Väärästä vastauksesta
HF1 laitteen käyttöönotto ja asetukset
 HF1 laitteen käyttöönotto ja asetukset Laitteen kytkentä 1. Kytke laitteeseen käyttöjännite 12V. Sulakkeelle menevään punaiseen johtoon kytketään +12V. Normaalissa odotustilassa laitteen virrankulutus
HF1 laitteen käyttöönotto ja asetukset Laitteen kytkentä 1. Kytke laitteeseen käyttöjännite 12V. Sulakkeelle menevään punaiseen johtoon kytketään +12V. Normaalissa odotustilassa laitteen virrankulutus
OPAS IOT OFFICE - PALVELUSI KÄYTTÄMISEEN
 OPAS IOT OFFICE - PALVELUSI KÄYTTÄMISEEN PÄHKINÄNKUORESSA NÄIN PALVELU TOIMII Telia Cloud Laitteet IoT Office Pilvipalvelu IoT Office Käyttöliittymä Laajenna Käynnistä laitteet Ota pilvipalvelu käyttöön
OPAS IOT OFFICE - PALVELUSI KÄYTTÄMISEEN PÄHKINÄNKUORESSA NÄIN PALVELU TOIMII Telia Cloud Laitteet IoT Office Pilvipalvelu IoT Office Käyttöliittymä Laajenna Käynnistä laitteet Ota pilvipalvelu käyttöön
Adafruit Circuit Playground Express
 Adafruit Circuit Playground Express Ulkoiset LEDit ja moottorit Sini Riikonen, sini.riikonen@helsinki.fi 6.6.2019 Adafruit Circuit Playground Express / Ledit ja moottorit / 2019 Innokas 1 Yleistä Circuit
Adafruit Circuit Playground Express Ulkoiset LEDit ja moottorit Sini Riikonen, sini.riikonen@helsinki.fi 6.6.2019 Adafruit Circuit Playground Express / Ledit ja moottorit / 2019 Innokas 1 Yleistä Circuit
Dynatel 2210E kaapelinhakulaite
 Dynatel 2210E kaapelinhakulaite Syyskuu 2001 KÄYTTÖOHJE Yleistä 3M Dynatel 2210E kaapelinhakulaite koostuu lähettimestä, vastaanottimesta ja tarvittavista johdoista. Laitteella voidaan paikantaa kaapeleita
Dynatel 2210E kaapelinhakulaite Syyskuu 2001 KÄYTTÖOHJE Yleistä 3M Dynatel 2210E kaapelinhakulaite koostuu lähettimestä, vastaanottimesta ja tarvittavista johdoista. Laitteella voidaan paikantaa kaapeleita
PIKAOHJE Tuulimittaus WS2-WTN + D-LINE
 v.181030 PIKAOHJE Tuulimittaus WS2-WTN + D-LINE URHEILUN AJANOTON EDELLÄKÄVIJÄ Sisällysluettelo 1 WS2-TUULIMITTARI JA MITTAUSLAITTEISTO... 1 2 KYTKENNÄT... 2 3 MITTARIN OHJAAMINEN... 3 4 YLEISTÄ TUULIMITTARISTA...
v.181030 PIKAOHJE Tuulimittaus WS2-WTN + D-LINE URHEILUN AJANOTON EDELLÄKÄVIJÄ Sisällysluettelo 1 WS2-TUULIMITTARI JA MITTAUSLAITTEISTO... 1 2 KYTKENNÄT... 2 3 MITTARIN OHJAAMINEN... 3 4 YLEISTÄ TUULIMITTARISTA...
Käyttöohje. Wireless
 Käyttöohje Wireless Pakkauksen sisältö 4 1. Unimouse 2. Langaton vastaanotin 3. USB 2.0 -kaapeliadapteri 4. Latauskaapeli 5. Käyttöopas 2 3 5 1 /1 Unimousen toiminnot Vieritysrulla/-painike Vasen painike
Käyttöohje Wireless Pakkauksen sisältö 4 1. Unimouse 2. Langaton vastaanotin 3. USB 2.0 -kaapeliadapteri 4. Latauskaapeli 5. Käyttöopas 2 3 5 1 /1 Unimousen toiminnot Vieritysrulla/-painike Vasen painike
Verkkopokerijärjestelmä. Loppuraportti Ryhmä Kanat Ohjelmistotuotantoprojekti, syksy 2008
 Verkkopokerijärjestelmä Loppuraportti Ryhmä Kanat Ohjelmistotuotantoprojekti, syksy 2008 Projektiryhmä Samuli Aalto-Setälä Jukka Kekälainen Jarno Kyykkä Mika Mielonen Mårten Smeds Otto Waltari Ohjaaja
Verkkopokerijärjestelmä Loppuraportti Ryhmä Kanat Ohjelmistotuotantoprojekti, syksy 2008 Projektiryhmä Samuli Aalto-Setälä Jukka Kekälainen Jarno Kyykkä Mika Mielonen Mårten Smeds Otto Waltari Ohjaaja
Pong-peli, vaihe Aliohjelman tekeminen. Muilla kielillä: English Suomi. Tämä on Pong-pelin tutoriaalin osa 3/7. Tämän vaiheen aikana
 Muilla kielillä: English Suomi Pong-peli, vaihe 3 Tämä on Pong-pelin tutoriaalin osa 3/7. Tämän vaiheen aikana Jaetaan ohjelma pienempiin palasiin (aliohjelmiin) Lisätään peliin maila (jota ei voi vielä
Muilla kielillä: English Suomi Pong-peli, vaihe 3 Tämä on Pong-pelin tutoriaalin osa 3/7. Tämän vaiheen aikana Jaetaan ohjelma pienempiin palasiin (aliohjelmiin) Lisätään peliin maila (jota ei voi vielä
Golfsimulaattorin käyttö- ja peliohjeet
 Golfsimulaattorin käyttö- ja peliohjeet 1. Käynnistys 1.1 Koneiden käynnistys Käynnistettäviä laitteita on yhteensä Kolme: tietokone, monitori ja videotykki, myös tarvittaessa lasertulostin. Tietokoneen
Golfsimulaattorin käyttö- ja peliohjeet 1. Käynnistys 1.1 Koneiden käynnistys Käynnistettäviä laitteita on yhteensä Kolme: tietokone, monitori ja videotykki, myös tarvittaessa lasertulostin. Tietokoneen
Käyttöohje. Wireless
 Käyttöohje Wireless Pakkauksen sisältö 4 1. Unimouse 2. Langaton vastaanotin 3. USB 2.0 -kaapeliadapteri 4. Latauskaapeli 5. Käyttöopas 2 3 5 1 /1 Unimousen toiminnot Taaksepäin-painike Vieritysrulla/-painike
Käyttöohje Wireless Pakkauksen sisältö 4 1. Unimouse 2. Langaton vastaanotin 3. USB 2.0 -kaapeliadapteri 4. Latauskaapeli 5. Käyttöopas 2 3 5 1 /1 Unimousen toiminnot Taaksepäin-painike Vieritysrulla/-painike
SYYS-SRA Rastit
 SYYS-SRA 2015 13.9.2015 Rastit Rasti 1: Valtaus (Pistooli) Olet saanut käskyn vallata menetetty varasto takaisin vihollisilta. Tehtäväsi ei tule olemaan helppo, koska varaston sokkeloinen rakenne tarjoaa
SYYS-SRA 2015 13.9.2015 Rastit Rasti 1: Valtaus (Pistooli) Olet saanut käskyn vallata menetetty varasto takaisin vihollisilta. Tehtäväsi ei tule olemaan helppo, koska varaston sokkeloinen rakenne tarjoaa
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS ROBOTIIKKA TEKOÄLYN GRAND CHALLENGE YHDISTÄÄ LÄHES KAIKKI TEKOÄLYN OSA-ALUEET: ROBOTIIKKA TEKOÄLYN GRAND CHALLENGE YHDISTÄÄ LÄHES KAIKKI TEKOÄLYN OSA-ALUEET: AIVOT : + KONENÄKÖ
JOHDATUS TEKOÄLYYN TEEMU ROOS ROBOTIIKKA TEKOÄLYN GRAND CHALLENGE YHDISTÄÄ LÄHES KAIKKI TEKOÄLYN OSA-ALUEET: ROBOTIIKKA TEKOÄLYN GRAND CHALLENGE YHDISTÄÄ LÄHES KAIKKI TEKOÄLYN OSA-ALUEET: AIVOT : + KONENÄKÖ
Käyttöohje. Wireless
 Käyttöohje Wireless Pakkauksen sisältö 4 Unimousen toiminnot 1. Unimouse 2. Langaton vastaanotin 3. USB 2.0 -kaapeliadapteri 4. Latauskaapeli 5. Käyttöopas 2 3 Vieritysrulla/-painike Taaksepäin-painike
Käyttöohje Wireless Pakkauksen sisältö 4 Unimousen toiminnot 1. Unimouse 2. Langaton vastaanotin 3. USB 2.0 -kaapeliadapteri 4. Latauskaapeli 5. Käyttöopas 2 3 Vieritysrulla/-painike Taaksepäin-painike
Langaton verenpainemittari (BP7) PIKAOPAS
 PIKAOPAS") FI Langaton verenpainemittari (BP7) PIKAOPAS Pikaoppaassa kerrotaan, kuinka mobiililaite määritellään, Bluetooth-yhteys muodostetaan ja verenpaine mitataan. Noudata alla olevia ohjeita aloittaaksesi mittauksen.
FI Langaton verenpainemittari (BP7) PIKAOPAS Pikaoppaassa kerrotaan, kuinka mobiililaite määritellään, Bluetooth-yhteys muodostetaan ja verenpaine mitataan. Noudata alla olevia ohjeita aloittaaksesi mittauksen.
Micro:bit. Käyttöohje. Innokas verkosto Petja Pyykkönen, Saimaan mediakeskus Käyttöohje / 2016 Innokas
 Micro:bit Käyttöohje Innokas verkosto Petja Pyykkönen, Saimaan mediakeskus 24.5.2017 Käyttöohje / 2016 Innokas Micro:bitin rakenne Micro:bitin etupuolelta löytyy 25 punaista LEDiä, jotka voidaan ohjelmoida
Micro:bit Käyttöohje Innokas verkosto Petja Pyykkönen, Saimaan mediakeskus 24.5.2017 Käyttöohje / 2016 Innokas Micro:bitin rakenne Micro:bitin etupuolelta löytyy 25 punaista LEDiä, jotka voidaan ohjelmoida
RollerMouse Red. Käyttöohje
 RollerMouse Red Käyttöohje Kiitos, että saamme auttaa sinua työskentelemään mukavammin ja tehokkaammin. Contour Design on pyrkinyt parhaan hiiren kehittämiseen vuodesta 1995 lähtien. Nyt voin todeta,
RollerMouse Red Käyttöohje Kiitos, että saamme auttaa sinua työskentelemään mukavammin ja tehokkaammin. Contour Design on pyrkinyt parhaan hiiren kehittämiseen vuodesta 1995 lähtien. Nyt voin todeta,
Ohjelmisto on selainpohjaisen käyttöliittymän tarjoava tietokantajärjestelmä merikotkien seurantaan WWF:n Merikotka-työryhmän tarpeisiin.
 TIETOKANTA MERIKOTKIEN SEURANTAAN Käyttöohje Versiohistoria: Versio Päivämäärä Kuvaus Tekijä 1.0 11.12.2007 Ensimmäinen luonnos Janne Piippo 2.0 13.12.2007 Virallinen verio Janne Piippo HELSINGIN YLIOPISTO
TIETOKANTA MERIKOTKIEN SEURANTAAN Käyttöohje Versiohistoria: Versio Päivämäärä Kuvaus Tekijä 1.0 11.12.2007 Ensimmäinen luonnos Janne Piippo 2.0 13.12.2007 Virallinen verio Janne Piippo HELSINGIN YLIOPISTO
Datatähti 2019 loppu
 Datatähti 2019 loppu task type time limit memory limit A Summa standard 1.00 s 512 MB B Bittijono standard 1.00 s 512 MB C Auringonlasku standard 1.00 s 512 MB D Binääripuu standard 1.00 s 512 MB E Funktio
Datatähti 2019 loppu task type time limit memory limit A Summa standard 1.00 s 512 MB B Bittijono standard 1.00 s 512 MB C Auringonlasku standard 1.00 s 512 MB D Binääripuu standard 1.00 s 512 MB E Funktio
kokoaminen 1. Ota ASPER ajanottolaitteisto 1- kentän laatikosta ja siirrä kisakentälle 2. Kokoa yleisönäyttö sopivaa paikkaan ja vedä sille sähkö
 pikaopas ASPER ajanoton kokoaminen 1. Ota ASPER ajanottolaitteisto 1- kentän laatikosta ja siirrä kisakentälle 2. Kokoa yleisönäyttö sopivaa paikkaan ja vedä sille sähkö Sähköjenkytkentästä oma kohta.
pikaopas ASPER ajanoton kokoaminen 1. Ota ASPER ajanottolaitteisto 1- kentän laatikosta ja siirrä kisakentälle 2. Kokoa yleisönäyttö sopivaa paikkaan ja vedä sille sähkö Sähköjenkytkentästä oma kohta.
KÄYTTÖOHJE LÄMPÖTILA-ANEMOMETRI DT-619
 KÄYTTÖOHJE LÄMPÖTILA-ANEMOMETRI DT-619 2007 S&A MATINTUPA 1. ILMAVIRTAUKSEN MITTAUS Suora, 1:n pisteen mittaus a) Kytke mittalaitteeseen virta. b) Paina UNITS - näppäintä ja valitse haluttu mittayksikkö
KÄYTTÖOHJE LÄMPÖTILA-ANEMOMETRI DT-619 2007 S&A MATINTUPA 1. ILMAVIRTAUKSEN MITTAUS Suora, 1:n pisteen mittaus a) Kytke mittalaitteeseen virta. b) Paina UNITS - näppäintä ja valitse haluttu mittayksikkö
CEM DT-3353 Pihtimittari
 CEM DT-3353 Pihtimittari Sivu 1/5 CEM DT-3353 Pihtimittari Ongelma Mittarin ohjelmisto ilmoittaa NO DATA vaikka tiedonsiirtokaapeli on kytketty tietokoneen ja mittarin välille, mittarissa on virta päällä
CEM DT-3353 Pihtimittari Sivu 1/5 CEM DT-3353 Pihtimittari Ongelma Mittarin ohjelmisto ilmoittaa NO DATA vaikka tiedonsiirtokaapeli on kytketty tietokoneen ja mittarin välille, mittarissa on virta päällä
Konfiguraatiotyökalun päivitys
 Konfiguraatiotyökalun päivitys Kuinka aloitan? Konfiguraatiotyökalu avataan niin kuin aiemminkin suoraan Tenstar clientin käyttöliittymästä, tai harjoituksen ollessa käynnissä. Kuinka aloitan konfiguraatiotyökalun
Konfiguraatiotyökalun päivitys Kuinka aloitan? Konfiguraatiotyökalu avataan niin kuin aiemminkin suoraan Tenstar clientin käyttöliittymästä, tai harjoituksen ollessa käynnissä. Kuinka aloitan konfiguraatiotyökalun
24.3.2005 Versio 1.0. BLUETOOTH DONGLE, GS-301 GPS JA NAVICORE PERSONAL Asennusohje Windows 2000/XP ja Nokia Series 60 älypuhelimille
 BLUETOOTH DONGLE, GS-301 GPS JA NAVICORE PERSONAL Asennusohje Windows 2000/XP ja Nokia Series 60 älypuhelimille 1 SISÄLLYLUETTELO 24.3.2005 1. Asennus...3 1.1 Bluetooth Dongle...3 1.2 Bluetooth GPS...3
BLUETOOTH DONGLE, GS-301 GPS JA NAVICORE PERSONAL Asennusohje Windows 2000/XP ja Nokia Series 60 älypuhelimille 1 SISÄLLYLUETTELO 24.3.2005 1. Asennus...3 1.1 Bluetooth Dongle...3 1.2 Bluetooth GPS...3
MAKING MODERN LIVING POSSIBLE. Danfoss Link SCM Simple Communication Module Asennusohje. Danfoss Heating Solutions
 MAKING MODERN LIVING POSSIBLE Simple Communication Module Asennusohje Danfoss Heating Solutions Sisällysluettelo Johdanto.... 29 Asennus.... 29 Kiinnitys.... 29 Johdotus... 30 Laitteen lisääminen.... 30
MAKING MODERN LIVING POSSIBLE Simple Communication Module Asennusohje Danfoss Heating Solutions Sisällysluettelo Johdanto.... 29 Asennus.... 29 Kiinnitys.... 29 Johdotus... 30 Laitteen lisääminen.... 30
Käyttöohjeet. Näppäimet. Kello tila. Pelitila
 Käyttöohjeet Näppäimet Kello tila Pelitila Kohdekuvakkeiden tiedot 1. Aloitus 1.1. Käynnistys / sammutus Paina ja pidä pohjassa -näppäintä käynnistääksesi / sulkeaksesi laitteen. 1.2. Lataaminen Lataa
Käyttöohjeet Näppäimet Kello tila Pelitila Kohdekuvakkeiden tiedot 1. Aloitus 1.1. Käynnistys / sammutus Paina ja pidä pohjassa -näppäintä käynnistääksesi / sulkeaksesi laitteen. 1.2. Lataaminen Lataa
Laboratorioraportti 3
 KON-C3004 Kone-ja rakennustekniikan laboratoriotyöt Laboratorioraportti 3 Laboratorioharjoitus 1B: Ruuvijohde Ryhmä S: Pekka Vartiainen 427971 Jari Villanen 69830F Anssi Petäjä 433978 Mittaustilanne Harjoituksessa
KON-C3004 Kone-ja rakennustekniikan laboratoriotyöt Laboratorioraportti 3 Laboratorioharjoitus 1B: Ruuvijohde Ryhmä S: Pekka Vartiainen 427971 Jari Villanen 69830F Anssi Petäjä 433978 Mittaustilanne Harjoituksessa
Taljajousen ostaminen
 Taljajousen ostaminen SJML koulutusmateriaali http://materiaali.jousimetsastys.fi Versio 1.0 Ensimmäisen taljajousen ostaminen Onneksi olkoon päätöksestäsi aloittaa uusi, hieno harrastus! Toivomme sinun
Taljajousen ostaminen SJML koulutusmateriaali http://materiaali.jousimetsastys.fi Versio 1.0 Ensimmäisen taljajousen ostaminen Onneksi olkoon päätöksestäsi aloittaa uusi, hieno harrastus! Toivomme sinun
Antitammirobotti. Antti Meriläinen Martin Pärtel 29. toukokuuta 2009
 Antitammirobotti Antti Meriläinen Martin Pärtel 29. toukokuuta 2009 Helsingin yliopisto Tietojenkäsittelytieteen laitos Robottiohjelmoinnin harjoitustyö
Antitammirobotti Antti Meriläinen Martin Pärtel 29. toukokuuta 2009 Helsingin yliopisto Tietojenkäsittelytieteen laitos Robottiohjelmoinnin harjoitustyö
SONY MZ-N707 MiniDisc-tallennin
 SONY MZ-N707 MiniDisc-tallennin 1) Paristojen ja akun käyttö 2 2) MiniDisc-levyn asettaminen soittimeen ja poistaminen soittimesta 2 3) Hold-kytkin 2 4) Laitteen kytkeminen mikrofoniin / tietokoneeseen
SONY MZ-N707 MiniDisc-tallennin 1) Paristojen ja akun käyttö 2 2) MiniDisc-levyn asettaminen soittimeen ja poistaminen soittimesta 2 3) Hold-kytkin 2 4) Laitteen kytkeminen mikrofoniin / tietokoneeseen
Käyttösäätimet. ActivSound 75. (1) Virtakytkin Kytkee virran päälle tai pois päältä. (2) Virtailmaisin Palaa vihreänä, kun virta on päällä.
 Virtakytkin Kytkee virran päälle tai pois päältä. (2) Virtailmaisin Palaa vihreänä, kun virta on päällä.") ActivSound 75 (1) Virtakytkin Kytkee virran päälle tai pois päältä. () Virtailmaisin Palaa vihreänä, kun virta on päällä. () Infrapunamikrofonin äänenvoimakkuuden säätö [Teacher 1 ja (Opettaja 1 ja )]
ActivSound 75 (1) Virtakytkin Kytkee virran päälle tai pois päältä. () Virtailmaisin Palaa vihreänä, kun virta on päällä. () Infrapunamikrofonin äänenvoimakkuuden säätö [Teacher 1 ja (Opettaja 1 ja )]
PIKAKÄYTTÖOHJE V S&A Matintupa
 PIKAKÄYTTÖOHJE V1.0 2007 S&A Matintupa MITTALAITE; PAINIKKEET, PORTIT, OSAT PAIKALLINEN portti (local, L) PÄÄPORTTI (master, M) LCD NÄYTTÖ PÄÄTETUNNISTIN VIRTAKYTKIN FUNKTIONÄPPÄIN Jännitteen syöttö VAHVISTUS/
PIKAKÄYTTÖOHJE V1.0 2007 S&A Matintupa MITTALAITE; PAINIKKEET, PORTIT, OSAT PAIKALLINEN portti (local, L) PÄÄPORTTI (master, M) LCD NÄYTTÖ PÄÄTETUNNISTIN VIRTAKYTKIN FUNKTIONÄPPÄIN Jännitteen syöttö VAHVISTUS/
Kuvan ottaminen ja siirtäminen
 Kuvan ottaminen ja siirtäminen Kuvien ottaminen Kuvien ottaminen tapahtuu oppilaiden omien kännykkäkameroiden tai koulun tablettien kameran avulla o Työ tehdään pareittain, joten ainakin toisella työparin
Kuvan ottaminen ja siirtäminen Kuvien ottaminen Kuvien ottaminen tapahtuu oppilaiden omien kännykkäkameroiden tai koulun tablettien kameran avulla o Työ tehdään pareittain, joten ainakin toisella työparin
XXIII Keski-Suomen lukiolaisten matematiikkakilpailu 23.1.2014, tehtävien ratkaisut
 XXIII Keski-Suomen lukiolaisten matematiikkakilpailu 23.1.2014, tehtävien ratkaisut 1. Avaruusalus sijaitsee tason origossa (0, 0) ja liikkuu siitä vakionopeudella johonkin suuntaan, joka ei muutu. Tykki
XXIII Keski-Suomen lukiolaisten matematiikkakilpailu 23.1.2014, tehtävien ratkaisut 1. Avaruusalus sijaitsee tason origossa (0, 0) ja liikkuu siitä vakionopeudella johonkin suuntaan, joka ei muutu. Tykki
Riistakameran käyttöohje
 Riistakameran käyttöohje Sisällysluettelo I. Pikakäyttöönotto... 2 1. Etupaneeli... 2 2. Alaosa ja virtakytkin... 3 Automaattinen infrapunakuvaustila... 3 Testitila... 3 Liitännät... 3 3. Patterin asettaminen...
Riistakameran käyttöohje Sisällysluettelo I. Pikakäyttöönotto... 2 1. Etupaneeli... 2 2. Alaosa ja virtakytkin... 3 Automaattinen infrapunakuvaustila... 3 Testitila... 3 Liitännät... 3 3. Patterin asettaminen...
Android. Sähköpostin määritys. Tässä oppaassa kuvataan uuden sähköpostitilin käyttöönotto Android 4.0.3 Ice Cream Sandwichissä.
 Y K S I K Ä Ä N A S I A K A S E I O L E M E I L L E LI I A N P I E NI TAI M I K Ä Ä N H A A S T E LI I A N S U U R I. Android Sähköpostin määritys Määrittämällä sähköpostitilisi Android-laitteeseesi, voit
Y K S I K Ä Ä N A S I A K A S E I O L E M E I L L E LI I A N P I E NI TAI M I K Ä Ä N H A A S T E LI I A N S U U R I. Android Sähköpostin määritys Määrittämällä sähköpostitilisi Android-laitteeseesi, voit
Kannettava tiedonsiirtolaite yksilötason LIVE paikannukseen! Pikakäyttöohje
 Kannettava tiedonsiirtolaite yksilötason LIVE paikannukseen! Pikakäyttöohje Kolme erilaista käyttötapaa; Käynnistä laite ja seuraa, Lähetä tekstiviestihälytys ja keskustele, Yhdistä Movescount harjoituspäiväkirjaan.
Kannettava tiedonsiirtolaite yksilötason LIVE paikannukseen! Pikakäyttöohje Kolme erilaista käyttötapaa; Käynnistä laite ja seuraa, Lähetä tekstiviestihälytys ja keskustele, Yhdistä Movescount harjoituspäiväkirjaan.
Epson EMP-765 langaton käyttö
 Epson EMP-765 langaton käyttö Tämä on yleinen käyttöohje Epsonin videotykin langattomaan käyttöön. Kannattaakin huomioida, että eri kannettavissa koneissa langaton käyttö saattaa hieman poiketa tässä ohjeessa
Epson EMP-765 langaton käyttö Tämä on yleinen käyttöohje Epsonin videotykin langattomaan käyttöön. Kannattaakin huomioida, että eri kannettavissa koneissa langaton käyttö saattaa hieman poiketa tässä ohjeessa
SEISAN 1(12) SEISAN. 1. Yoi
 SEISAN. 1. Yoi") SEISAN 1(12) Kuvien lähde: Gijomonkai ry:n katavideo Tekstien lähde: Shoko-Ryu kolleegio Shoko-Ryu vyokoevaatimukset (Lokakuu 2003 Tarkistettu versio helmikuu 2004 ) SEISAN 1. Yoi 2. Askel vasemmalla jalalla
SEISAN 1(12) Kuvien lähde: Gijomonkai ry:n katavideo Tekstien lähde: Shoko-Ryu kolleegio Shoko-Ryu vyokoevaatimukset (Lokakuu 2003 Tarkistettu versio helmikuu 2004 ) SEISAN 1. Yoi 2. Askel vasemmalla jalalla
COMET TRUE WIRELESS NAPPIKUULOKKEET
 Varoitus: Vältä mahdolliset kuulovauriot olemalla kuuntelematta suurella äänenvoimakkuudella pitkiä aikoja. Kun käytät näitä nappikuulokkeita, kiinnitä oman turvallisuutesi takia huomiota ympäristöön.
Varoitus: Vältä mahdolliset kuulovauriot olemalla kuuntelematta suurella äänenvoimakkuudella pitkiä aikoja. Kun käytät näitä nappikuulokkeita, kiinnitä oman turvallisuutesi takia huomiota ympäristöön.
Ohjeissa pyydetään toisinaan katsomaan koodia esimerkkiprojekteista (esim. Liikkuva_Tausta1). Saat esimerkkiprojektit opettajalta.
. Saat esimerkkiprojektit opettajalta.") Ohjeissa pyydetään toisinaan katsomaan koodia esimerkkiprojekteista (esim. Liikkuva_Tausta1). Saat esimerkkiprojektit opettajalta. Vastauksia kysymyksiin Miten hahmon saa hyppäämään? Yksinkertaisen hypyn
Ohjeissa pyydetään toisinaan katsomaan koodia esimerkkiprojekteista (esim. Liikkuva_Tausta1). Saat esimerkkiprojektit opettajalta. Vastauksia kysymyksiin Miten hahmon saa hyppäämään? Yksinkertaisen hypyn
CROSSTRAINER (Model E 7000P)
") CROSSTRAINER (Model E 7000P) Kuva 1 Poista pultit (C4) tiivisterenkaat (C5) ja mutterit (C6) takavakaajasta (C). Laita kaksi pulttia (C4) takavakaajan läpi, kiinnittääksesi kannattimen laitteeseen (A),
CROSSTRAINER (Model E 7000P) Kuva 1 Poista pultit (C4) tiivisterenkaat (C5) ja mutterit (C6) takavakaajasta (C). Laita kaksi pulttia (C4) takavakaajan läpi, kiinnittääksesi kannattimen laitteeseen (A),
Aineistoista. Laadulliset menetelmät: miksi tarpeen? Haastattelut, fokusryhmät, havainnointi, historiantutkimus, miksei videointikin
 Aineistoista 11.2.09 IK Laadulliset menetelmät: miksi tarpeen? Haastattelut, fokusryhmät, havainnointi, historiantutkimus, miksei videointikin Muotoilussa kehittyneet menetelmät, lähinnä luotaimet Havainnointi:
Aineistoista 11.2.09 IK Laadulliset menetelmät: miksi tarpeen? Haastattelut, fokusryhmät, havainnointi, historiantutkimus, miksei videointikin Muotoilussa kehittyneet menetelmät, lähinnä luotaimet Havainnointi:
Käyttöohje Contact WP Poca
 Käyttöohje Contact WP Poca 1 SISÄLLYSLUETTELO 1 Yleistä...3 2 Tilausvälityssovelluksen käynnistäminen...3 3 Poca-laitteen aktivoiminen...4 3.1 Toiminnon aktivoiminen:...4 4 Tilauksen vastaanottaminen...6
Käyttöohje Contact WP Poca 1 SISÄLLYSLUETTELO 1 Yleistä...3 2 Tilausvälityssovelluksen käynnistäminen...3 3 Poca-laitteen aktivoiminen...4 3.1 Toiminnon aktivoiminen:...4 4 Tilauksen vastaanottaminen...6
INDUKTIIVISEN PÄÄTTELYN HARJOITUSPAKETTI ENSIMMÄISELLE LUOKALLE
 INDUKTIIVISEN PÄÄTTELYN HARJOITUSPAKETTI ENSIMMÄISELLE LUOKALLE Induktiivisen päättelyn opetuskuvakortit Tehtävät 1 ja 2 Ryhmän muodostaminen ja ryhmän laajentaminen 1. Jaa palikat kahteen ryhmään. Ryhmän
INDUKTIIVISEN PÄÄTTELYN HARJOITUSPAKETTI ENSIMMÄISELLE LUOKALLE Induktiivisen päättelyn opetuskuvakortit Tehtävät 1 ja 2 Ryhmän muodostaminen ja ryhmän laajentaminen 1. Jaa palikat kahteen ryhmään. Ryhmän
CO 2 -anturi. Langaton. Käyttöohje. -fi käännetty asiakirja A004. Englannin kielestä
 CO 2 -anturi Langaton Englannin kielestä -fi käännetty asiakirja 2017-03-20 A004 Sisällysluettelo 1 Vaatimustenmukaisuusvakuutus... 1 2 Tuotteen kuvaus... 2 2.1 CO 2-mittaus... 3 3 Asennusohjeet... 3 4
CO 2 -anturi Langaton Englannin kielestä -fi käännetty asiakirja 2017-03-20 A004 Sisällysluettelo 1 Vaatimustenmukaisuusvakuutus... 1 2 Tuotteen kuvaus... 2 2.1 CO 2-mittaus... 3 3 Asennusohjeet... 3 4
Ohjelmointi 1 / syksy /20: IDE
 Ohjelmointi 1 / syksy 2007 10/20: IDE Paavo Nieminen nieminen@jyu.fi Tietotekniikan laitos Informaatioteknologian tiedekunta Jyväskylän yliopisto Ohjelmointi 1 / syksy 2007 p.1/8 Tämän luennon rakenne
Ohjelmointi 1 / syksy 2007 10/20: IDE Paavo Nieminen nieminen@jyu.fi Tietotekniikan laitos Informaatioteknologian tiedekunta Jyväskylän yliopisto Ohjelmointi 1 / syksy 2007 p.1/8 Tämän luennon rakenne
Labyrintti. Pelihahmon toiminta. Piirrä pelihahmo (älä piirrä esim. sivusta, ettei hahmon tarvitse
 Labyrintti 1 Kerää aarteita labyrintista samalla kuin siellä liikkuu haamu. Seiniksi käyvät mm. vaaralliset laserit ja lava, mutta pienellä lisävaivalla niistä voi tehdä myös kiinteät ja vaarattomat Mallipeli
Labyrintti 1 Kerää aarteita labyrintista samalla kuin siellä liikkuu haamu. Seiniksi käyvät mm. vaaralliset laserit ja lava, mutta pienellä lisävaivalla niistä voi tehdä myös kiinteät ja vaarattomat Mallipeli
DumpDbox-ohjelmiston asennus- ja käyttöohjeet Sisällys
 DumpDbox-ohjelmiston asennus- ja käyttöohjeet Sisällys 1. Esittely... 2 2. Asennusohjeet... 2 3. Yleiskuva ohjelmistosta... 3 4. Tietojen siirtäminen D-Boxin avulla... 4 4.1. Piirturitiedostojen siirtäminen...
DumpDbox-ohjelmiston asennus- ja käyttöohjeet Sisällys 1. Esittely... 2 2. Asennusohjeet... 2 3. Yleiskuva ohjelmistosta... 3 4. Tietojen siirtäminen D-Boxin avulla... 4 4.1. Piirturitiedostojen siirtäminen...
Lukon asettelu Kotihälytin järjestelmään
 Lukon asettelu Kotihälytin järjestelmään Lukkojen EH-LP-808A, 908, 905 asettelu osaksi Kotihälytin järjestelmää Ennen asettelujen aloittamista: 1. Sormenjälkilukon (EH-LP-808A) tai koodilukon (EH-LP-908
Lukon asettelu Kotihälytin järjestelmään Lukkojen EH-LP-808A, 908, 905 asettelu osaksi Kotihälytin järjestelmää Ennen asettelujen aloittamista: 1. Sormenjälkilukon (EH-LP-808A) tai koodilukon (EH-LP-908
Harjoitussuunnitelma viikko 5 Pallo haltuun I
 Harjoitussuunnitelma viikko 5 Pallo haltuun I = Pelikenttä = Keiloilla rajattu alue = Pelaaja = Maalivahti = Valmentaja = Pallo = Liike pallon kanssa = Liike ilman palloa = Syöttö tai potku Harjoituskerran
Harjoitussuunnitelma viikko 5 Pallo haltuun I = Pelikenttä = Keiloilla rajattu alue = Pelaaja = Maalivahti = Valmentaja = Pallo = Liike pallon kanssa = Liike ilman palloa = Syöttö tai potku Harjoituskerran
1. Taustatietoa näppäimistönkuuntelusta
 Muilla kielillä: English Suomi Pong-peli, vaihe 5 Tämä on Pong-pelin tutoriaalin osa 5/7. Tämän vaiheen aikana Lisäämme peliin näppäimet Laitetaan mailat liikkumaan pelaajien ohjaamina Näin ohjelmaamme
Muilla kielillä: English Suomi Pong-peli, vaihe 5 Tämä on Pong-pelin tutoriaalin osa 5/7. Tämän vaiheen aikana Lisäämme peliin näppäimet Laitetaan mailat liikkumaan pelaajien ohjaamina Näin ohjelmaamme
BTS-31 Bluetooth-kaiutin Lyhyt käyttöohje
 1. Toimenpide A. Virta kääntäminen päälle: Painaessasi pitkään painiketta 'Φ/ BTS-31 Bluetooth-kaiutin Lyhyt käyttöohje ' kuulet piippauksen ja sininen valo alkaa vilkkua. B. Viran kääntäminen pois päältä:
1. Toimenpide A. Virta kääntäminen päälle: Painaessasi pitkään painiketta 'Φ/ BTS-31 Bluetooth-kaiutin Lyhyt käyttöohje ' kuulet piippauksen ja sininen valo alkaa vilkkua. B. Viran kääntäminen pois päältä:
OHJELMOINTILAITE 10/50
 OHJELMOINTILAITE 10/50 1 2 3 4 5 6 17 16 15 7 14 8 13 12 11 10 9 1) Näyttö 1 taivutuksen nro. 2) Näyttö 2 kulma 3) LED merkkivalo MANUAALI 4) OFF-SET. 5) Taivutussuunta. 6) Palautus 7) Käynnistys ja resetointi.
OHJELMOINTILAITE 10/50 1 2 3 4 5 6 17 16 15 7 14 8 13 12 11 10 9 1) Näyttö 1 taivutuksen nro. 2) Näyttö 2 kulma 3) LED merkkivalo MANUAALI 4) OFF-SET. 5) Taivutussuunta. 6) Palautus 7) Käynnistys ja resetointi.
Hyvä Webaston käyttäjä! Tämä käyttöohje on tarkoitettu valtuutetun asentamon antaman käytönopastuksen
 Käyttö- ja huolto-ohje T80 advanced FIN Yleistä Hyvä Webaston käyttäjä! Tämä käyttöohje on tarkoitettu valtuutetun asentamon antaman käytönopastuksen tueksi.. Tässä käyttöohjeessa haluamme vielä luoda
Käyttö- ja huolto-ohje T80 advanced FIN Yleistä Hyvä Webaston käyttäjä! Tämä käyttöohje on tarkoitettu valtuutetun asentamon antaman käytönopastuksen tueksi.. Tässä käyttöohjeessa haluamme vielä luoda
Harjoitus Bones ja Skin
 LIITE 3 1(6) Harjoitus Bones ja Skin Harjoituksessa käsiteltävät asiat: Yksinkertaisen jalan luominen sylinteristä Luurangon luominen ja sen tekeminen toimivaksi raajaksi Luurangon yhdistäminen jalka-objektiin
LIITE 3 1(6) Harjoitus Bones ja Skin Harjoituksessa käsiteltävät asiat: Yksinkertaisen jalan luominen sylinteristä Luurangon luominen ja sen tekeminen toimivaksi raajaksi Luurangon yhdistäminen jalka-objektiin