Kaksipyöräinen robotti
|
|
|
- Johannes Oksanen
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 AS Automaatio- ja systeemitekniikan projektityö Kaksipyöräinen robotti Opintopisteet: 7 Tapio Lantela, 66559C, Automaatio- ja systeemitekniikka tapio.lantela@tkk.fi

2 Sisällysluettelo Ideointi...2 Mekaniikka...3 Runko...3 Moottorit...4 Akku...5 Elektroniikka...6 Mikrokontrollerilevy...6 Anturit...7 Moottorinohjain...7 Ohjelmointi...8 Inertiaalimittausyksikkö...8 Moottorinohjaus...9 Säätö...10 Lopuksi...12 Liitteet...13 Tuntiarvio...13 Mikrokontrollerilevyn skeema...13 Mikrokontrollerilevyn suunnitelma...14 Ideointi Aloin tutustumaan mikrokontrollereihin puolisen vuotta ennen tämän projektin aloittamista. Rakentelin aluksi pieniä yksinkertaisia kytkentöjä, joiden jälkeen aloin rakentamaan energiansäästölampun lampun himmentimellä varustettua herätyskelloa. Mikrokontrolleri- ja elektroniikkataitojen karttuessa rakentelun aikana herätyskelloprojekti alkoi tuntumaan hieman yksinkertaiselta ja kiinnostus sitä kohtaan lopahti. Sen sijaan halusin rakentaa jotain liikkuvaa, johon voisin soveltaa oppimiani säätömenetelmiä. Olin opetellut mikrokontrollerien alkeita Arduino-ohjelmointiympäristöllä, jonka erinomaiselta keskustelualueelta bongasin mielenkiintoisia projekteja, joissa rakennettiin kahdella pyörällä tasapainoileva robotti. Useissa projekteissa robotti oli kuitenkin mekaniikaltaan hutaistun oloisesti kasattu eikä rakentajilla tuntunut olevan juurikaan ymmärtämystä säätötekniikasta. Päätin siis tehdä sekä mekaniikaltaan, että elektroniikaltaan ja säädöltään paremman kaksipyöräisen robotin kuin keskustelualueella näkemissäni projekteissa. Tavoitteena minulla oli alunperin siis tehdä kaksipyöräinen robotti, joka ensimmäisessä vaiheessa pysyisi itsekseen pystyssä. Tämän jälkeen tarkoitus olisi jatkaa projektia siten, että robotin saisi liikkumaan itsekseen ja sen jälkeen vielä mahdollisesti lisätä robottiin jonkinlainen kauko-ohjaus.

3 Mekaniikka Aloitin projektin suunnittelemalla robotin mekaniikkaa. Kaksipyöräisen robotin mekaniikka on hyvin yksinkertainen, sillä periaatteessa robotin ainoat liikkuvat osat ovat robotin sivuilla olevat pyörät eikä niitä ole edes tarpeen pystyä kääntämään. Renkaiden lisäksi robotilla on käännettävä pää, jossa olevaa ultraäänianturia voidaan käyttää esteiden havaitsemiseen. Runko Koska robotilla ei ole tarkoituskaan pystyä ajamaan hankalassa maastossa, pyörille ei välttämättä tarvita minkäänlaista jousitusta. Robotti on myös kohtalaisen kevyt (alle 2 kg), joten tarpeeksi tukevat moottorit hankkimalla, pyörät voidaan kiinnittää suoraan moottorin tai vaiheteiston akselille ilman muuta ripustusta. Tällöin moottoreiden akselien laakerointi kantaa koko robotin painon, mikä ei varmasti ole optimaalinen ratkaisu, mutta näin kevyessä robotissa ja vähällä ajolla ratkaisu on kelvollinen ja kaikkein yksinkertaisin rakentaa. Robotin rungon tarkoituksena on ainoastaan pitää pyörät paikoillaan sekä toimia kiinnitysalustana antureille, akulle ja ohjauselektroniikalle. Rungon täytyy olla tarpeeksi tukeva, jotta se kestää robotin törmäämisen ja kaatumisen. Lisäksi rungon painopisteellä on suuri merkitys robotin ominaisuuksille. Mahdollisimman hyvää tasapainoa haettaessa rungon painopiste kannattaa sijoittaa ylös. Tällöin rungon hitausmomentti pyörien akselien ympäri on suurimmillaan, joten se kaatuu hitaasti. Painopisteen ollessa ylhäällä robotti ei kuitenkaan ole kovin ketterä kiihdytyksissä ja jarrutuksissa. Koska robotin painavimmat osat eli moottorit ja vaihteistot ovat samalla akselilla renkaiden kanssaa, suurin vaikutus robotin painopisteen sijaintiin on seuraavaksi painavimman osan eli akun sijoituksella. Päätin tehdä kompromissin robotin stabiiliuden ja ketteryyden välillä ja sijoittaa akun rungon keskivaiheille. Rungon suunnittelussa käytin Solid Edge CAD-ohjelmaa. Pyrin mallintamaan kaikki osat tarkasti, jotta osat varmasti mahtuisivat runkoon suunnitellulla tavalla ja kiinnitysreiät osuisivat kohdalleen mahdollisimman hyvin. Valmis CAD-malli on nähtävissä kuvassa 1 ja sen perusteella rakennettu robotti kuvassa 2. Rungon sivulevyinä käytin lankasahalla muotoon sahattua 3 mm alumiinilevyä ja rungon välitasoina sekä etu- ja takalevyinä 2 mm alumiinia. Ohuemmat alumiinilevyt leikkasin muotoon giljotiinileikkurilla ja taivutin sen jälkeen levytaivuttimella. Runko on kasattu ruuveilla kokoamisen ja purkamisen helpottamiseksi. Osalle ruuveista tein kierteet suoraan levyihin ja osalle käytin muttereita. Alumiinin pehmeyden ja levyjen ohuuden vuoksi osa levyihin tehtdyistä kierteistä ei tuntunut kestävän ruuvien toistuvaa irrottamista ja kiinnittämistä. Myös välitasojen tarkasti oikeaan kokoiseksi taivuttaminen osoittautui hieman haastavaksi levytaivuttimella. Renkaiksi valitsin Pololu-verkkokaupan kapeat ohuella kumilla päällystetyt pienikuvioiset renkaat. Tämä sen vuoksi, että leveämmät ja pehmeämmät renkaat olisivat todennäköisesti aiheuttaneet robotin odometriaan enemmän virhettä. Renkaille löytyi kaupasta myös valmiit keskiöt vaihteiston akselille kiinnittämistä varten.

4 Drawing 1: CAD-malli robotin rungosta Drawing 2: Valmis runko Moottorit Tällaisessa pienessä robotissa moottorivaihtoehtoina ovat käytännössä DC-moottorit, RC-servot sekä askelmoottorit. Näistä RC-servot liikkuvat normaalisti vain 180 asteen alueella, mutta ne on yleensä kohtuullisen helppo modifioida pyörimään jatkuvasti jompaan kumpaan suuntaan riippuen servolle annetusta kulmaohjeesta. RC-servojen etuna olisi valmis ja kompakti moottorin, alennusvaihteen ja moottorinohjauselektroniikan yhdistelmä. Merkittävä ongelma niissä on kuitenkin vaihteiston suuri välitys ja sitä kautta akselin hidas pyörimisnopeus. Askelmoottoreiden ongelmana sen sijaan on heikohko vääntömomentti sekä jatkuva virrankulutus myös silloin kun moottori ei tee työtä. Päädyin siis käyttämään robotissa kummallekin pyörälle omaa DC-moottoria ja alennusvaihteistoa. Tällöin moottorille ei tarvitse antaa ollenkaan virtaa sen ollessa halutussa asennossa, mutta tarvittaessa moottorista saadaan hetkellisesti suuriakin vääntöjä suurilla virroilla. Moottorin vaihteiston välitys täytyy valita siten, että vaihteiston akseli saadaan pyörimään riittävän nopeasti, jotta robotilla saavutetaan haluttu maksiminopeus. Toisaalta välityksen täytyy olla niin suuri, että robotin pyörille saadaan riittävä vääntömomentti. Itse käytin nyrkkisääntönä sitä, että robotin täytyy jaksaa nostaa itsensä korkeahkon esteen yli eli maksimivääntömomentin yhdelle moottorille täytyy olla ainakin M max = renkaiden säde robotin paino 2 Tavoitteena maksiminopeudelle käytin arvoa 1 m/s. Nämä vaatimukset rajasivat pois kaikkein pienimmät lelumoottorit ja hieman tehokkaammatkin metallivaihteistoiset harrastemoottorit. Päätin että ostan kerralla hieman paremmat moottorit, joita voi kenties käyttää tulevaisuudessa muissakin projekteissa. Päädyin tilaamaan Banebots nimisestä firmasta kaksi harjallista DC-moottoria 20:1 planeetta-alennusvaihteistolla. Vakiomoottoreiden 17 ampeerin maksimivirralla vaihteiston akselilta saatava vääntömomentti on 14 kgcm eli noin 1,4 N ja maksimikierrosnopeus 818 rpm. 1,4 N maksimiväännöllä ja 8 cm halkaisijaisilla renkailla kaksi moottoria jaksaisi nostaa teoriassa vielä noin robotin 7 kg painoisen robotin ja maksiminopeudeksi tulisi lähes 3 m/s. Moottorit osoittautuivatkin vähintäänkin tarpeeksi tehokkaiksi ja kenties niiden tehoa rajoittamalla olisi voinut

5 säästää testausympäristöä muutamilta kolhuilta. Tärkeä ominaisuus moottoria ja vaihteistoa valittaessa oli myös se, että vaihteisto ei aiheuttaisi vaihteiston akselin liikkeeseen välystä, sillä välys liikesuuntaa vaihtaessa aiheuttaa säätöalgoritmille ongelmia epäjatkuvuuden takia. Käsittääkseni valitsemieni vaihteistojen pitäisi olla kohtuullisen pienivälyksiset, mutta suurehkoilla renkailla vaihteistojen välys on silti selvästi huomattava ja aiheuttaa jonkin verran ongelmia säädössä. Akku Akuksi valitsin litiumpolymeeriakun, sillä ne ovat hyvin kevyitä suhteessa kapasiteettiinsa. Lisäksi litiumpolymeeriakkujen sisäinen resistanssi on hyvin pieni, joten ne voivat tuottaa suuren virran ilman, että akun napajännite tippuu huomattavasti. Sain myös tilattua 7,4 V 5000 mah li-po akun latureineen hyvin halvalla Hobbyking-nettikaupasta, joten valinta oli helppo. 7,4 V on moottoreille suoraan sopiva jännite ja siitä on helppo reguloida 5 V jännite mikrokontrollerilla lineaariregulaattorilla.

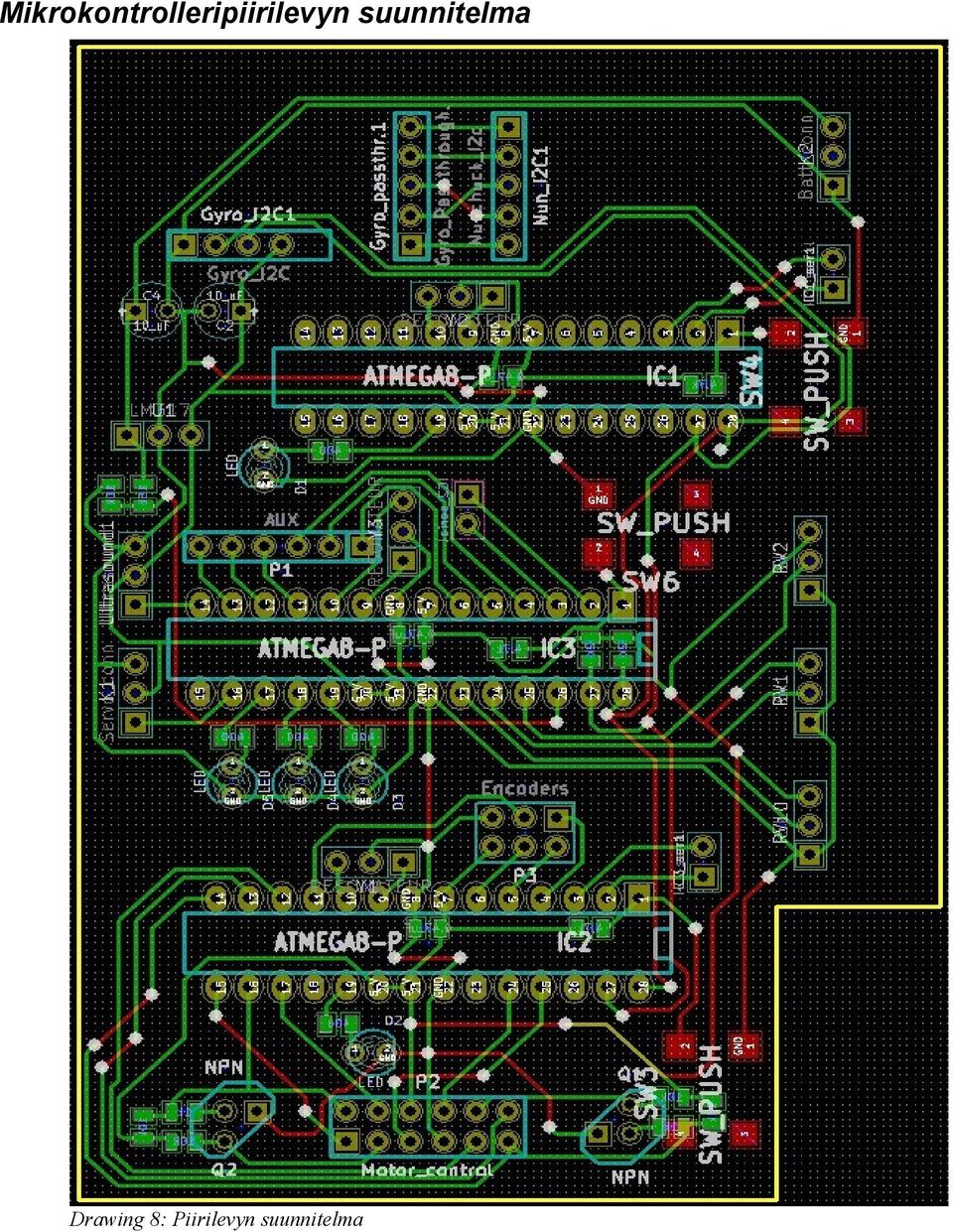
6 Elektroniikka Mikrokontrollerilevy Olin rakennellut aikaisemminkin pieniä projekteja Arduino kehitysympäristöllä, jossa käytetään useimmiten Atmelin Atmega168 tai Atmega328 mikrokontrollereita, joten oli loogista käyttää niitä myös tässä projektissa. Minulla oli visio jakaa robotin ohjausjärjestelmä kolmeen eri osaa, jolloin samalla voisin samalla harjoitella mikrokontrollereiden välistä kommunikaatiota. Ohjausjärjestelmästä voidaan erottaa selkeästi omaksi osakseen ainakin inertiaalimittausyksikkö, moottorinohjaus sekä ylemmän tason logiikka, joista jokaista hoitamaan tulee erillinen mikrokontrolleri. Mikrokontrollerit kommunikoivat keskenään I2C-väylän kautta siten, sillä valitsemani kiihtyvyysanturi ja gyroskooppi käyttävät sitä joka tapauksessa. Toinen ja jälkikäteen ehkä parempi vaihtoehto olisi ollut käyttää mikrokontrollerien väliseen kommunikaatioon SPI-väylää, jolloin kontrollerien välisellä kommunikaatiolla ei olisi ollut vaikutusta anturien kommunikointiin. Rakensin aluksi toimivan mikrokontrolleripiirilevyn reikälevylle juottamalla. Opettelin kuitenkin samoihin aikoihin töissä piirilevyjen suunnittelua ja valmistusta, joten päätin korvata reikälevylle tehdyn piirilevyn paremmin suunnitellulla ja siistimmin valmistetulla. Suunnittelin siis piirilevyn KiCAD- piirilevynsuunnitteluohjelmalla uudestaan ja syövytin sen kaksipuoleiselle levylle. Piirilevyn suunnitelmat ovat nähtävillä tämän dokumentin liitteissä ja valmis piirilevy kuvassa 3. Piirilevyllä on kolme mikrokontrolleria, jänniteregulaattori, pari potentiometriä sekä liittimet antureille, moottorinohjaimelle ja servolle. Drawing 3: Valmis syövytetty mikrokontrollerilevy

7 Anturit Robotin asentoa mitataan kiihtyvyysanturilla ja gyroskoopilla. Gyron avulla saadaan mitattua kulmanopeus pyörien akselien ympäri eli robotin kaatumisnopeus. Kaatumisnopeudesta voidaan integroida robotin asentokulma. Integroituun kulmaan kertyy kuitenkin jatkuvasti virhettä, joka täytyy korjata absoluuttisella kulmamittauksella. Absoluuttinen kulmamittaus saadaan kiihtyvyysanturilla, jolla voidaan mitata painovoiman aiheuttama kiihtyvyys. Kiihtyvyysanturin lukemaan kuitenkin vaikuttavat myös robotin kiihtyvyys eteen- ja taaksepäin, joten sitä ei voida käyttää robotin ainoana asentoanturina. Gyrosta saatava lyhyellä aikavälillä tarkka kulma- ja kulmanopeus voidaan yhdistää kiihtyvyysanturista saatavalla pitkällä aikavälillä stabiilina pysyvään kulmamittaukseen optimaalisesti Kalman-suotimella. Gyroskooppina robotissa toimii Nintendo Wiin peliohjaimen Motion Plus -lisäosasta purettu piirilevy. Levyllä on kolmiakselinen gyroskooppi ja se kommunikoi peliohjaimen kanssa I2C-väylän kautta. Robotissa mikrokontrolleri esiintyy Motion Plussalle peliohjaimena, jolloin mittaustulokset saadaan luettua I2C-väylän kautta. Kiihtyvyysanturina toimii vastaavasti Nintendo Wiin Nunchukpeliohjain, jossa on kolmiakselinen kiihtyvyysanturi. Irrotin piirilevyt peliohjainten kuorista ja juotin niiden johtojen tilalle piikkirimat. Tällöin anturit pystyi kiinnittämään mikrokontrolleripiirilevyllä oleviin liittimiin vain painamalla eikä antureita tarvinnut juuri kiinnittää sen tukevammin. Tämän robotin tapauksessa antureiksi olisivat riittäneet yksiakselinen gyroskooppi ja kaksiakselinen kiihtyvyysanturi, mutta peliohjaimista puretut kolmiakseliset anturit olivat erittäin halpoja, joten niistä ei ollut tarvetta säästää. Asentoanturien lisäksi robotissa on ultraäänianturi, jolla voidaan mitata etäisyys robotin päästä noin kuuteen metriin asti. Ultraäänianturia voidaan kääntää mikroservolla haluttuun suuntaan 180 asteen alueella. Pystysuunnassa anturi kallistuu aina robotin mukana, joten etäisyysmittauksen arvo heittelee hieman robotin kulmasta riippuen. Olin suunnitellut robottiin ja osittain jo valmistetanutkin optiset inkrementaalienkooderit renkaisiin, mutta ne jäivät toteuttamatta loppuun asti ajanpuutteen vuoksi. Enkooderit oli tarkoitus toteuttaa pallohiiren enkooderilevyjä ja detektoreita käyttämällä. Detektorit oli tarkoitus siirtää erilliselle piirilevylle ja enkooderilevyt oli tarkoitus kiinnittää moottorin akselille. Moottoreiden akseli on hieman näkyvillä moottorin takapuolella, joten enkooderilevyn voi kiinnittää akselille poraamalla akselin päähän reiän ja liimaamalla siihen tapin, johon levyn voi kiinnittää. Moottorinohjain Moottorinohjaimen tehtävänä on säätää portaattomasti moottoreiden käämien yli vaikuttavaa jännitettä ja sitä kautta käämien virtaa, joka taas vaikuttaa suoraan moottoreiden vääntömomenttiin sen hetkisessä toimintapisteessä. Koska moottorit vaativat suurta virtaa, täytyy jännitteen säätäminen tehdä käytännössä PWM:llä eli pulssinleveysmoduloidulla signaalilla. Tällöin moottoreiden käämeille annetaan pieninä sykäyksinä täysi käyttöjännite ja välillä moottori kytketään irti jännitteestä. Käämeissä kulkeva virta ei kuitenkaan muutu äkillisesti, joten mikäli sykäysten väli on tarpeeksi pieni, säätyy käämien virta käytännössä portaattomasti. Virran suunta käämeissä täytyy myös pystyä kääntämään, jotta moottoreiden pyörimissuunta voidaan vaihtaa. Käytännössä tämä toteutetaan neljästä kytkimestä rakennetulla H-sillalla. Kytkiminä voidaan käyttää esimerkiksi bipolaaritransistoreja tai MOSFETeja. Moottorinohjain voidaan rakentaa joko erillisistä kytkimistä tai valmiista moottorinohjainpiireistä, joissa on sekä kytkimet että muu tarvittava ohjauslogiikka sisäänrakennettuna. Koska valitsemieni moottorien maksimivirta on noin 17 ampeeria, rakentelijoiden tavallisimmin käyttämien pienten moottorinohjainpiirien virrankesto ei riitä. Tämän vuoksi suunnittelin vakavasti rakentavani oman moottorinohjaimen erillisillä MOSFETeilla, mutta päädyin kuitenkin käyttämään kohtuullisen kallista, mutta helppokäyttöistä valmista moottorinohjainpiirilevyä. Itse rakentamalla moottorinohjaimen virrankeston olisi saanut helposti hyvin suureksi, mutta ongelmana olisi ollut

8 suurehko piirilevy sekä mahdollisesti MOSFETien nopean kytkennän aiheuttamat sähköiset ja sähkömagneettiset häiriöt muussa osassa elektroniikkaa. Jälkikäteen mietittynä kaupallisen moottorinohjaimen ostaminen oli erinomainen päätös, sillä olen tämän projektin jälkeen suunnitellut yhden moottorinohjaimen ja se oli vähintäänkin haastavaa. Moottorinohjaimena robotissa toimii kaksikanavainen kahteen VNH2SP30-piiriin perustuva valmis moottorinohjain. VNH2SP30-piirin maksimivirta on hetkellisesti noin 30 ampeeria ja jatkuvanakin 14 ampeeria, mikä riittää hyvin robotin moottoreille. Piiri tarvitsee ohjaussignaaleina suunta- sekä PWM muotoisen virransäätösignaalin. Harkitsin myös oman moottorinohjaimen rakentamista VNH2SP30-piirien pohjalta, mutta pelkkien piirien hinta oli jo noin 15 euroa kappale, joten pienen säästön vuoksi ei olisi kannattanut nähdä rakentamisen vaivaa. Ohjelmointi Ohjelmoinnissa käytin Arduino-ohjelmointiympäristöä ja mittausdatan visualisoinnissa Processingympäristöä. Arduino on erinomainen ympäristö mikrokontrolleriohjelmointiin tutustumista varten sekä yksinkertaisille projekteille, mutta vuoden opiskelun jälkeen sen rajoitteet alkavat tulla vastaan haastavammissa projekteissa. Esimerkiksi mikrokontrollerin tuottaman PWM-signaalin taajuuden säätäminen on kohtuullisen vaikeaa Arduinolla. Tämän lisäksi käsittääkseni yksi tietty ajastin on aina käytössä ohjelman toiminnan ajastamiseen, joten sitä ei voi käyttää muuhun toimintaa. Mikäli aloittaisin vastaavan projektin alusta, en enää tekisi sitä Arduinolla vaan esimerkiksi Codevisionilla, WinAVR:llä tms. Inertiaalimittausyksikkö Yksi selkeästi erotettava osajärjestelmä robotissa on gyroskoopista, kiihtyvyysanturista sekä yhdestä mikrokontrollerista koostuva inertiaalimittausyksikkö. Inertiaalimittausyksiköstä saadaan ulos mittaustiedot kulmanopeuksista, kiihtyvyyksistä sekä kiihtyvyysanturin kanssa samalla piirilevyllä olevan joystickin asennosta. Mikrokontrolleri siis kommunikoi erillisillä piirilevyillä olevien antureiden (kuvan 3 yläreunassa) kanssa I2C-väylän kautta. I2C-väylän käyttämiseen antureiden kanssa kommunikointiin löytyi esimerkkikoodi, jota muokkaamalla toteutin oman ohjelmani. Antureille lähetetään väylän kautta pyyntö uusille mittauksille, minkä jälkeen tulokset voidaan lukea väylältä. Mittaustulokset voidaan lukea ainakin 100 Hz taajuudella, mikä riittää tämän robotin tapauksessa hyvin. Ainakin kiihtyvyysanturin mittauksia pystyi lukemaan yli 200 Hz taajuudella, mutta antureista alkoi jossain vaiheessa tulla hieman epämääräisiä tuloksia, mikäli koodista poisti kaikki viiveet. Tämä virhe tuntui toistuvan lähinnä satunnaisesti, joten sen etsimiseen ja korjaamiseen kului paljon aikaa. Mittaustulosten lukemisen kiihtyvyysanturin datasta voidaan laskea yksinkertaisesti trigonometrialla robotin asento ja gyroskoopin kulmanopeusdatasta voidaan integroida robotin kulma sen alkuasennon suhteen. Tämän jälkeen inertiaalimittausyksikkö yhdistää niistä yhden tarkan arvion robotin kulmasta Kalman-suotimen avulla. Kalman suotimen koodista löysin joitakin esimerkkejä, joita yhdistelemällä ja tulkitsemalla tein oman koodini. Tavoitteenani oli kuitenkin olla kopioimatta aivottomasti valmista esimerkkiä ja sen sijaan ymmärtää koodin ja Kalman-suotimen toimintaa hieman. Tämän jälkeen Kalman-suodin piti vielä virittää toimimaan mahdollisimman nopeasti, mutta häiriöttömästi. Virittämisen tein melko mututuntumalla kiihtyvyysanturin ja gyroskoopin variansseja muutellen.

9 Drawing 4: Vihreä: Gyrosta integroitu kulma, Keltainen: Kiihtyvyysanturista mitattu kulma, Valkoinen: Kalmansuotimesta saatu kulma Virittämisen ja virheenhaun apuna käytin Processing-ohjelmointiympäristöä. Processingissa käyttäjä voi kirjoittaa lyhyehköjä ohjelmia samaan tapaan kuin Arduinossa, mutta ohjelmat käännetään ja ajetaan tietokoneella. Ohjelmilla on helppo muun muassa visualisoida sarjaportin kautta lähetettävää mittausdataa. Processingilla visualisoitua inertiaalimittausyksikön mittausdataa on nähtävissä kuvassa 4. Kuvan pystyakselilla on robotin kallistuskulma ja vaaka-akselilla aika. Kuvasta näkyy, että gyroskoopin mittausta kuvaava vihreä käyrä on vaeltanut kauas Kalmansuotimen ulostuloa kuvaavasta valkoisesta käyrästä. Kiihtyvyysanturin mittauksista laskettua kulmaa kuvaava keltainen käyrä sen sijaan seuraa pitkällä aikavälillä todellista kulmaa hyvin, mutta värähtelee lyhyellä aikavälillä sen ympäristössä hyvin levottomasti. Nopeissa liikkeissä kuvaajan keskivaiheen jälkeen kiihtyvyysanturin mittauksista laskettu kulma heittelee aivan missä sattuu, sillä robottiin kohdistuu merkittävissä määrin muitakin kiihtyvyyksiä kuin painovoiman aiheuttama kiihtyvyys. Kalman-suodin yhdistää siis gyroskoopin ja kiihtyvyysanturin parhaat ominaisuudet ja mahdollistaa huonojen ominaisuuksien kompensoinnin pois mittaustuloksista. Moottorinohjaus Toinen jollain tavalla erotettava osajärjestelmä robotissa on moottorinohjaus. Moottorinohjauksen tehtävänä oli alunperin tarkoitus vastaanottaa nopeusohje ja säätää sen perusteella moottoreiden nopeus halutuksi. Käytännössä siis moottorinohjausta hoitava mikrokontrolleri olisi lukenut ulkoisilla keskeytyspinneillä optisten enkoodereiden pulsseja ja laskenut niistä moottoreiden nopeuden. Tämän jälkeen mikrokontrolleri olisi laskenut esimerkiksi PID-säätimellä sopivan PWMohjeen varsinaiselle moottorinohjainpiirilevylle, joka olisi PWM:n ohjaamana säätänyt moottoreiden virtaa ja sitä kautta vääntömomenttia. Koska en ehtinyt toteuttaa robottiin optisia enkoodereita, minkä vuoksi renkailta ei ole saatavissa asentotakaisinkytkentää, ei myöskään takaisinkytkettyä nopeussäätöä ollut mahdollista toteuttaa. Toteutettu säätöjärjestelmä on kuvattu seuraavassa luvussa.

10 Säätö Tarkoituksena oli alunperin toteuttaa niin sanotusti ylemmän tason ohjaus erillisellä mikrokontrollerilla, jotta se ei vaikeuttaisi nopealla tahdilla suoritettavien antureiden lukemisen ja moottorinohjauksen ajoittamista. Kuvassa 5 näkyy alkuperäinen suunnitelma säätöjärjestelmästä. Siinä siis mikrokontrolleri 1 toimii inertiaalimittausyksikkönä ja lähettää mikrokontrolleri 2:lle tiedon robotin asentokulmasta. Mikrokontrolleri 3 lähettää mikrokontrolleri 2:lle mittauksen robotin nopeudesta, kuljetusta matkasta ja paikasta odometrian perusteella. Mikrokontrolleri 2 laskee robotin asennon, nopeuden ja paikan perusteella nopeusohjeen kummallekin moottorille erikseen ja lähettää sen kontrolleri 3:lle. Mikrokontrolleri 3 laskee ja lähettää tämän jälkeen tarvittavat PWMsignaalit moottorinohjainlevylle PID-säätimellä. Kontrolleri 2:ssa robotin asentokulmaa ohjaavan säätimen olin aluksi ajatellut toteuttaa PID-säätimellä, mutta myöhemmin ehkä sumealla säätimellä. Drawing 5: Alkuperäinen suunnitelma ohjaukselle


11 Koska optiset enkooderit jäivät toteuttamatta, yksinkertaistui säätöjärjestelmä huomattavasti. Tällä hetkellä toteutettu säätöjärjestelmä on esitetty kuvassa 6. Drawing 6: Toteutettu ohjausjärjestelmä Mikrokontrolleri 1 siis toimii inertiaalimittausyksikkönä kuten alkuperäisessäkin suunnitelmassa, mutta mikrokontrolleri 3 sen sijaan hoitaa nyt koko robotin säätämisen. Mikrokontrolleri 2:n ainoiksi tehtäviksi jäi säätimen virittämiseen käytettävien potentiometrien asennon lukeminen ja eteenpäin viestittäminen sekä ultraäänianturin lukeminen. Robotti siis laskee PID-säädintä, jonka sisääntulona on robotin asentokulma ja ulostulona moottorinohjaimen PWM-signaali. PWMsignaali vaikuttaa moottoreiden vääntöön ja sitä kautta robotin asentokulmaan. PID-säätimen säätöväli on 10 ms. Yritin aluksi toteuttaa järjestelmää siten, että PID-säädin laskettaisiin mikrokontrolleri 2:ssa, mutta en saanut tällöin järjestelmää stabiiliksi. Todennäköisesti kontrollerien välinen kommunikointi aiheutti liikaa viivettä järjestelmään, jolloin sen virittäminen stabiiliksi oli hankalaa. En vielä projektin tässä vaiheessa osannut käyttää kontrollereiden keskeytyksiä tarpeeksi viiveettömän tiedonsiirron ja ohjelman suorituksen toteuttamiseen. Robotti alkoi heti toimimaan paremmin kun asentokulma toimitettiin suoraan PID-säädintä laskevalle ja moottoreita ohjaavalle kontrollerille. PID-säätimen virityksessä en käyttänyt mitään tunnettua menetelmää, kuten Ziegler Nicholsia tms. Hain ensin testaamalla P-termin maksimin siten, että robotti alkoi värähtelemään liikaa, minkä jälkeen pienensin sitä hieman. Seuraavaksi asetin D-termin niin suureksi kuin mahdollista, ilman että kulmamittauksessa oleva kohina alkoi näkymään robotin liikkeessä nykimisenä. Tällöin robotti oli jo hyvinkin vakaa, mutta nojasi jatkuvasti jompaan kumpaan suuntaan eikä siten pysynyt paikallaan. I-termiä lisäämällä nojaamisen sai loppumaa ja robotti alkoi myös pysymään välttävästi paikoillaan.virittämisen alkuvaiheessa pyrin myös ottamaan huomioon esimerkiksi robotin voimansiirron lepokitkan. Robotin renkaat eivät siis lähde pyörimään hyvin pienillä PWM-arvoilla, koska moottorin vääntömomentti ei jaksa voittaa pääasiassa vaihteistosta johtuvaa kitkaa. Koitin estää tätä siten, moottoreille ei anneta koskaan lähes nolla PWM:ää, vaan aina sen verran suuri ohjaus että renkaat lähtevät pyörimään. Tämä aiheutti kuitenkin säätimeen epäjatkuvuuden renkaiden pyörimissuuntaa vaihtaessa ja säädin oli hyvin hankala virittää stabiiliksi. Yksi epästabiilisuutta aiheuttanut ongelma on myös varmasti se, että osa I2C-väylällä liikkuvista paketeista näyttäisi katoavan. Mielenkiintoisesti katoavien pakettien määrä näyttäisi riippuvan robotin asentokulmasta. Eräitä mahdollisia syitä katoaviin paketteihin voi olla moottoreiden aiheuttamat sähköiset häiriöt tai kenties eripituiset viestit erilaisella mittausdatalla, jolloin softa

12 saattaa käsitellä osan viesteistä väärin. Välistä kadonnut paketti joka tapauksessa aiheuttaa joskus sen, että robotti kallistuu liikaa, minkä jälkeen se yrittää liian nopeasti korjata asentoaan ja kaatuu. Lopuksi Aloitin projektin harrasteprojektina jo kuukausia ennen projektityökurssin alkua, joten en pitänyt tuntikirjanpitoa projektin alusta lähtien enkä alkanut pitää sitä kurssin alettuakaan, koska ajattelin ettei työhön jo käyttämistäni tunneista ole enää mahdollista tehdä järkevää arviota. Käytin erittäin paljon aikaa erilaisten moottorivaihtoehtojen, moottorinohjauksen, antureiden yms. tutkimiseen verkkoa selailemalla, sillä näistä oli koululla opetettu hyvin vähän. Liitteissä olevaan tuntikirjanpitooni arvioin aika karkeasti kuinka paljon mihinkin osa-alueeseen työssä on mennyt aikaa. Dokumentoinnin, sekä mekaniikan ja elektroniikan valmistuksen aika-arviot ovat todennäköisesti kohtuu lähellä totuutta, sillä ne tein aika lyhyessä ajassa. Toisaalta komponenttien tutkiminen ja valinta sekä ohjelmointi ovat jakautuneet vajaan vuoden ajalle, joten niihin käyttämääni aikaa on aika hankala arvioida. Tämän vuoden aikana, jonka projekti on ollut enemmän tai vähemmän työn alla olen, oppinut erityisesti elektroniikasta, mekaniikasta sen verran, että osaamiseni on aika paljon parempi kuin projektin alussa. Tämä onkin osasyy siihen että kiinnostukseni projektin loppuun viemiseksi on hieman hävinnyt. Esimerkiksi mikrokontrolleripiirilevyn saisi mielellään suunnitella ainakin osittain uusiksi kunnollisen maatason kanssa, jotta esimerkiksi moottoreiden virrat eivät aiheuttaisi häiriöitä levylle. Lisäksi robotin ohjelman voisi kirjoittaa uusiksi ilman Arduino ympäristöä, jotta moottoreidn PWM-taajuutta pääsisi säätämään helpommin. Myös mikrokontrollereiden välinen kommunikointi ja ohjelman skedulointi pitäisi muuttaa keskeytyspohjaisiksi. Projektin päätavoite toteutui siis aika hyvin eli robotti pysyy itsekseen pystyssä. Lisätavoitteet jäävät nyt toteuttamatta, mutta tällaisenakin projekti on ollut kyllä erittäin opettavainen.

13 Liitteet Tuntiarvio Työlaji Tunteja Komponenttien etsiminen/tutkiminen 50 Suunnittelu Mekaniikka 10 Elektroniikka 25 Valmistus Mekaniikka 25 Elektroniikka 10 Ohjelmointi 60 Dokumentointi 10 Yhteensä 190 Mikrokontrollerilevyn skeema Drawing 7: Piirilevyn skeema

14 Mikrokontrolleripiirilevyn suunnitelma Drawing 8: Piirilevyn suunnitelma
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-03 USB-käyttöinen syvyysanturi 5op 13.9.2011-29.11.2011 Johan Backlund Ohjaaja: Johan Grönholm Johdanto Projektin tavoitteena oli suunnitella
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-03 USB-käyttöinen syvyysanturi 5op 13.9.2011-29.11.2011 Johan Backlund Ohjaaja: Johan Grönholm Johdanto Projektin tavoitteena oli suunnitella
DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä
 1 DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä JK 23.10.2007 Johdanto Harrasteroboteissa käytetään useimmiten voimanlähteenä DC-moottoria. Tämä moottorityyppi on monessa suhteessa kätevä
1 DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä JK 23.10.2007 Johdanto Harrasteroboteissa käytetään useimmiten voimanlähteenä DC-moottoria. Tämä moottorityyppi on monessa suhteessa kätevä
S14 09 Sisäpeltorobotti AS Automaatio ja systeemitekniikan projektityöt. Antti Kulpakko, Mikko Ikonen
 S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
Projektisuunnitelma. Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys
 1 Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys Muutoshistoria Versionumero Pvm Selitys Tekijä(t) 0.1 18.9.2012 Otso Saarentaus 2 Sisällysluettelo 1 PROJEKTIN SISÄLTÖ... 3 1.1 TAUSTA......3
1 Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys Muutoshistoria Versionumero Pvm Selitys Tekijä(t) 0.1 18.9.2012 Otso Saarentaus 2 Sisällysluettelo 1 PROJEKTIN SISÄLTÖ... 3 1.1 TAUSTA......3
S14 09 Sisäpeltorobotti AS Automaatio ja systeemitekniikan projektityöt. Antti Kulpakko, Mikko Ikonen
 S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
Käyttöohje. Tasapainolauta
 Käyttöohje Tasapainolauta Kiitos kun ostit tasapainolaudan.! VAROITUS! Opettele ajamaan laitteella turvallisesti, huomioi muu liikenne ja säännöt. Käytä lisäksi säädösten mukaisia turvavarusteita. Älä
Käyttöohje Tasapainolauta Kiitos kun ostit tasapainolaudan.! VAROITUS! Opettele ajamaan laitteella turvallisesti, huomioi muu liikenne ja säännöt. Käytä lisäksi säädösten mukaisia turvavarusteita. Älä
AS Automaatio ja systeemitekniikan projektityöt A13 10 Radio ohjattavan pienoismallin ohjausjärjestelmän ja käyttöliittymän kehittäminen
 Väliraportti AS 0.3200 Automaatio ja systeemitekniikan projektityöt A13 10 Radio ohjattavan pienoismallin ohjausjärjestelmän ja käyttöliittymän kehittäminen Toni Liski, Konsta Hölttä, Lasse Kortetjärvi
Väliraportti AS 0.3200 Automaatio ja systeemitekniikan projektityöt A13 10 Radio ohjattavan pienoismallin ohjausjärjestelmän ja käyttöliittymän kehittäminen Toni Liski, Konsta Hölttä, Lasse Kortetjärvi
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt. Projektisuunnitelma. Peltorobotin akselimoduulin ohjain
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Projektisuunnitelma Peltorobotin akselimoduulin ohjain Joni Rannisto Janne Hafrén Matti Koskinen 31.1.2012 1 1. Projektin tavoite Projektin tavoitteena
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Projektisuunnitelma Peltorobotin akselimoduulin ohjain Joni Rannisto Janne Hafrén Matti Koskinen 31.1.2012 1 1. Projektin tavoite Projektin tavoitteena
-Motorracing Electronics WB-NÄYTTÖ KÄYTTÖOHJE. WB-näyttö Käyttöohje v1.0 12/2011 1/7
 WB-NÄYTTÖ KÄYTTÖOHJE 1/7 SISÄLLYSLUETTELO 1. YLEISTÄ... 3 1.1. SPESIFIKAATIO...3 2. ASENNUS... 4 2.1. MEKAANINEN ASENNUS...4 2.2. SÄHKÖINEN ASENNUS...4 3. KÄYTTÖOHJE... 6 3.1. INNOVATE LC-1 OHJELMOINTI...6
WB-NÄYTTÖ KÄYTTÖOHJE 1/7 SISÄLLYSLUETTELO 1. YLEISTÄ... 3 1.1. SPESIFIKAATIO...3 2. ASENNUS... 4 2.1. MEKAANINEN ASENNUS...4 2.2. SÄHKÖINEN ASENNUS...4 3. KÄYTTÖOHJE... 6 3.1. INNOVATE LC-1 OHJELMOINTI...6
Adafruit Circuit Playground Express
 Adafruit Circuit Playground Express Ulkoiset LEDit ja moottorit Sini Riikonen, sini.riikonen@helsinki.fi 6.6.2019 Adafruit Circuit Playground Express / Ledit ja moottorit / 2019 Innokas 1 Yleistä Circuit
Adafruit Circuit Playground Express Ulkoiset LEDit ja moottorit Sini Riikonen, sini.riikonen@helsinki.fi 6.6.2019 Adafruit Circuit Playground Express / Ledit ja moottorit / 2019 Innokas 1 Yleistä Circuit
Peltorobotin akselimoduulin kontrolleri
 Peltorobotin akselimoduulin kontrolleri Automaatio- ja systeemitekniikan projektityöt B.Sc. Joni Rannisto (Mech.) Janne Hafrén (Mech.) Matti Koskinen (Mech.) Esitelmän rakenne 1. Tehtävänanto ja vaatimukset
Peltorobotin akselimoduulin kontrolleri Automaatio- ja systeemitekniikan projektityöt B.Sc. Joni Rannisto (Mech.) Janne Hafrén (Mech.) Matti Koskinen (Mech.) Esitelmän rakenne 1. Tehtävänanto ja vaatimukset
Agenda. Johdanto Säätäjiä. Mittaaminen. P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen
 8. Luento: Laitteiston ohjaaminen Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
8. Luento: Laitteiston ohjaaminen Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
ELEC-C1110 Automaatio- ja systeemitekniikan. Luento 11 Esimerkki automaation soveltamisesta
 ELEC-C1110 Automaatio- ja systeemitekniikan perusteet Luento 11 Esimerkki automaation soveltamisesta Tämän luennon aihe Esimerkki automaation soveltamisesta käytännössä: WorkPartner-palvelurobotti WorkPartner
ELEC-C1110 Automaatio- ja systeemitekniikan perusteet Luento 11 Esimerkki automaation soveltamisesta Tämän luennon aihe Esimerkki automaation soveltamisesta käytännössä: WorkPartner-palvelurobotti WorkPartner
A11-02 Infrapunasuodinautomatiikka kameralle
 A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
PC vai Yoshbox? Moottorinohjauksen lyhyt teoria ja vertailu Mustavalkoisesti kirjoitettuna innostamaan tiedon ja mielipiteiden jakamiseen by PetriK
 PC vai Yoshbox? Moottorinohjauksen lyhyt teoria ja vertailu Mustavalkoisesti kirjoitettuna innostamaan tiedon ja mielipiteiden jakamiseen by PetriK Vastuunrajaus PC vai Yoshbox Kirjoittaja on kirjoittanut
PC vai Yoshbox? Moottorinohjauksen lyhyt teoria ja vertailu Mustavalkoisesti kirjoitettuna innostamaan tiedon ja mielipiteiden jakamiseen by PetriK Vastuunrajaus PC vai Yoshbox Kirjoittaja on kirjoittanut
- Käyttäjä voi valita halutun sisääntulon signaalin asetusvalikosta (esim. 0 5V, 0 10 V tai 4 20 ma)
") LE PDX DIN kiskokiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 4 numeroinen LED näyttö - Selkeä rakenne, yksinkertainen käyttää
LE PDX DIN kiskokiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 4 numeroinen LED näyttö - Selkeä rakenne, yksinkertainen käyttää
AS Automaatio- ja systeemitekniikan projektityöt
 3/19/2012 AALTO- YLIOPISTO AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Joni Rannisto Matti Koskinen Janne Hafrén 1. Projektin tavoite Projektin tavoitteena on rakentaa akselimoduulin ohjain
3/19/2012 AALTO- YLIOPISTO AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Joni Rannisto Matti Koskinen Janne Hafrén 1. Projektin tavoite Projektin tavoitteena on rakentaa akselimoduulin ohjain
OUM6410C4037 3-pisteohjattu venttiilimoottori 24 VAC
 OUM6410C4037 3-pisteohjattu venttiilimoottori 24 VAC TUOTETIEDOT YLEISTÄ OUM6410C venttiilimoottori soveltuu hitaiden säätöprosessien ohjaamiseen, esim. lämmityspiirien säätöön. Venttiilimoottori ei tarvitse
OUM6410C4037 3-pisteohjattu venttiilimoottori 24 VAC TUOTETIEDOT YLEISTÄ OUM6410C venttiilimoottori soveltuu hitaiden säätöprosessien ohjaamiseen, esim. lämmityspiirien säätöön. Venttiilimoottori ei tarvitse
ELKA STAGE 5 MTB ISKUNVAIMENNIN SÄÄTÖOHJE
 ELKA STAGE 5 MTB ISKUNVAIMENNIN SÄÄTÖOHJE 1. PAINUMA 2. ULOSVAIMENNUS 3. HIDAS SISÄÄNVAIMENNUS 4. NOPEA SISÄÄNVAIMENNUS 5. MITÄ ISKUNVAIMENNIN ON 6. HIDAS vs NOPEA SISÄÄNVAIMENNUS 1. PAINUMAN ASETTAMINEN
ELKA STAGE 5 MTB ISKUNVAIMENNIN SÄÄTÖOHJE 1. PAINUMA 2. ULOSVAIMENNUS 3. HIDAS SISÄÄNVAIMENNUS 4. NOPEA SISÄÄNVAIMENNUS 5. MITÄ ISKUNVAIMENNIN ON 6. HIDAS vs NOPEA SISÄÄNVAIMENNUS 1. PAINUMAN ASETTAMINEN
- Käyttäjä voi valita halutun sisääntulon signaalin asetusvalikosta (esim. 0 5V, 0 10 V tai 4 20 ma)
") LE PSX DIN kisko kiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 3 numeron LED näyttö - Selkeä rakenne, yksinkertainen käyttää
LE PSX DIN kisko kiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 3 numeron LED näyttö - Selkeä rakenne, yksinkertainen käyttää
Laboratorioraportti 3
 KON-C3004 Kone-ja rakennustekniikan laboratoriotyöt Laboratorioraportti 3 Laboratorioharjoitus 1B: Ruuvijohde Ryhmä S: Pekka Vartiainen 427971 Jari Villanen 69830F Anssi Petäjä 433978 Mittaustilanne Harjoituksessa
KON-C3004 Kone-ja rakennustekniikan laboratoriotyöt Laboratorioraportti 3 Laboratorioharjoitus 1B: Ruuvijohde Ryhmä S: Pekka Vartiainen 427971 Jari Villanen 69830F Anssi Petäjä 433978 Mittaustilanne Harjoituksessa
ZigBee-ohjaus kuorma-autolle
 ZigBee-ohjaus kuorma-autolle Juho Frits Petteri Koivumäki 10. helmikuuta 2010 Tavoitteet Projektityössä on tavoitteena rakentaa langaton ZigBee-ohjausverkko kaukoohjattavalle kuorma-autolle (kts. Kuva
ZigBee-ohjaus kuorma-autolle Juho Frits Petteri Koivumäki 10. helmikuuta 2010 Tavoitteet Projektityössä on tavoitteena rakentaa langaton ZigBee-ohjausverkko kaukoohjattavalle kuorma-autolle (kts. Kuva
Pienet sähkötoimilaitteet 90 käännöllä
 Pienet sähkötoimilaitteet 90 käännöllä Rotork-toimilaitteet Yksi toimilaitetekniikan johtavista valmistajista Rotork on luotettava ja tuotteet ovat pitkälle kehitettyjä. Rotorkilla on yli neljänkymmenen
Pienet sähkötoimilaitteet 90 käännöllä Rotork-toimilaitteet Yksi toimilaitetekniikan johtavista valmistajista Rotork on luotettava ja tuotteet ovat pitkälle kehitettyjä. Rotorkilla on yli neljänkymmenen
KÄYTTÖOHJE ELTRIP-R6. puh. 08-6121 651 fax 08-6130 874 www.trippi.fi seppo.rasanen@trippi.fi. PL 163 87101 Kajaani
 KÄYTTÖOHJE ELTRIP-R6 PL 163 87101 Kajaani puh. 08-6121 651 fax 08-6130 874 www.trippi.fi seppo.rasanen@trippi.fi SISÄLLYSLUETTELO 1. TEKNISIÄ TIETOJA 2. ELTRIP-R6:n ASENNUS 2.1. Mittarin asennus 2.2. Anturi-
KÄYTTÖOHJE ELTRIP-R6 PL 163 87101 Kajaani puh. 08-6121 651 fax 08-6130 874 www.trippi.fi seppo.rasanen@trippi.fi SISÄLLYSLUETTELO 1. TEKNISIÄ TIETOJA 2. ELTRIP-R6:n ASENNUS 2.1. Mittarin asennus 2.2. Anturi-
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-17 Ikäihmisten kotona asumista tukevien järjestelmien kehittäminen Väliraportti Joonas Aalto-Setälä Ossi Malaska 1. Projektin tavoitteet Projektin
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-17 Ikäihmisten kotona asumista tukevien järjestelmien kehittäminen Väliraportti Joonas Aalto-Setälä Ossi Malaska 1. Projektin tavoitteet Projektin
74470 SPS. Loppuraportti
 74470 SPS Loppuraportti Raketin laukaisualustan suoristin Tampereella 4.12.2004 Ryhmä 00 190080 Tommi Berg 182810 Ossi Mäkinen 1. Etusivu 2. Sisällysluettelo 3. Laitteen kuvaus 4. Käyttöohje 5. Tekninen
74470 SPS Loppuraportti Raketin laukaisualustan suoristin Tampereella 4.12.2004 Ryhmä 00 190080 Tommi Berg 182810 Ossi Mäkinen 1. Etusivu 2. Sisällysluettelo 3. Laitteen kuvaus 4. Käyttöohje 5. Tekninen
A15 - Inertial Measurement Unit
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt (6op) 16.09.2008-19.12.2008 A15 - Inertial Measurement Unit Mikko Virkkilä Aki Juutistenaho Ohjaaja: Tapio
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt (6op) 16.09.2008-19.12.2008 A15 - Inertial Measurement Unit Mikko Virkkilä Aki Juutistenaho Ohjaaja: Tapio
SUPIKOIRA-projekti. Tommi Berg Eero Alkkiomäki. (Tero Huttunen, Sami Kiiskilä, Ossi Mäkinen, Ilpo Suominen, Mikko Suominen, Asser Vuola)
") SUPIKOIRA-projekti Tommi Berg Eero Alkkiomäki (Tero Huttunen, Sami Kiiskilä, Ossi Mäkinen, Ilpo Suominen, Mikko Suominen, Asser Vuola) Mistä on kyse? Pienoisrakettiharrastus heräämässä Suomessa (SATS,
SUPIKOIRA-projekti Tommi Berg Eero Alkkiomäki (Tero Huttunen, Sami Kiiskilä, Ossi Mäkinen, Ilpo Suominen, Mikko Suominen, Asser Vuola) Mistä on kyse? Pienoisrakettiharrastus heräämässä Suomessa (SATS,
Ilmanvaihto Säätimet 7/2016
 Ilmanvaihto Säätimet 7/2016 2 Säätimet STR 230 V perusmuuntajasäädin STR-1 säätimen toiminta perustuu muuntajalla toteutettavaan jännitteen säätöön. Säädin soveltuu moottorien pyörimis-nopeuden manuaalisen
Ilmanvaihto Säätimet 7/2016 2 Säätimet STR 230 V perusmuuntajasäädin STR-1 säätimen toiminta perustuu muuntajalla toteutettavaan jännitteen säätöön. Säädin soveltuu moottorien pyörimis-nopeuden manuaalisen
A11-02 Infrapunasuodinautomatiikka kameralle
 A11-02 Infrapunasuodinautomatiikka kameralle Väliraportti 21.3.2012 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo 1. Projektityön tavoite 1.1 Piirisuunnittelu
A11-02 Infrapunasuodinautomatiikka kameralle Väliraportti 21.3.2012 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo 1. Projektityön tavoite 1.1 Piirisuunnittelu
a) Piirrä hahmotelma varjostimelle muodostuvan diffraktiokuvion maksimeista 1, 2 ja 3.
 Piirrä hahmotelma varjostimelle muodostuvan diffraktiokuvion maksimeista 1, 2 ja 3.") Ohjeita: Tee jokainen tehtävä siististi omalle sivulleen/sivuilleen. Merkitse jos tehtävä jatkuu seuraavalle konseptille. Kirjoita ratkaisuihin näkyviin tarvittavat välivaiheet ja perustele lyhyesti käyttämästi
Ohjeita: Tee jokainen tehtävä siististi omalle sivulleen/sivuilleen. Merkitse jos tehtävä jatkuu seuraavalle konseptille. Kirjoita ratkaisuihin näkyviin tarvittavat välivaiheet ja perustele lyhyesti käyttämästi
Ledien kytkeminen halpis virtalähteeseen
 Ledien kytkeminen halpis virtalähteeseen Ledien valovoiman kasvu ja samanaikaisen voimakkaan hintojen lasku on innostuttanut monia rakentamaan erilaisia tauluja. Tarkoitan niillä erilaista muoveista tehtyjä
Ledien kytkeminen halpis virtalähteeseen Ledien valovoiman kasvu ja samanaikaisen voimakkaan hintojen lasku on innostuttanut monia rakentamaan erilaisia tauluja. Tarkoitan niillä erilaista muoveista tehtyjä
P I C A X E O H J E L M O I N T I
 PICAXE OHJELMOINTI Tämä materiaalipaketti on tehty PICAXE piireihin perustuvaa elektroniikan opetusta varten. Tarkoituksena on opettaa ohjelmoitavan mikropiirin käyttöä erilaisissa sovellutuksissa. Lisää
PICAXE OHJELMOINTI Tämä materiaalipaketti on tehty PICAXE piireihin perustuvaa elektroniikan opetusta varten. Tarkoituksena on opettaa ohjelmoitavan mikropiirin käyttöä erilaisissa sovellutuksissa. Lisää
Akkujen aktiivinen balansointi
 Väliraportti 1(5) Akkujen aktiivinen balansointi Ohjaaja: Jorma Selkäinaho Työryhmä: Kalle Fagerman Johan Holmberg Otso Jousimaa Aleksi Salonen Väliraportti 2(5) Johdanto Projektimme jatkaa syksyllä aloitettua
Väliraportti 1(5) Akkujen aktiivinen balansointi Ohjaaja: Jorma Selkäinaho Työryhmä: Kalle Fagerman Johan Holmberg Otso Jousimaa Aleksi Salonen Väliraportti 2(5) Johdanto Projektimme jatkaa syksyllä aloitettua
A14-11 Potilaan mittaustiedon siirtäminen matkapuhelimeen
 1 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A14-11 Potilaan mittaustiedon siirtäminen matkapuhelimeen Projektisuunnitelma Tommi Salminen, Hanna Ukkola, Olli Törmänen 19.09.2014 1 Projektin
1 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A14-11 Potilaan mittaustiedon siirtäminen matkapuhelimeen Projektisuunnitelma Tommi Salminen, Hanna Ukkola, Olli Törmänen 19.09.2014 1 Projektin
PID-sa a timen viritta minen Matlabilla ja simulinkilla
 PID-sa a timen viritta minen Matlabilla ja simulinkilla Kriittisen värähtelyn menetelmä Tehtiin kuvan 1 mukainen tasavirtamoottorin piiri PID-säätimellä. Virittämistä varten PID-säätimen ja asetettiin
PID-sa a timen viritta minen Matlabilla ja simulinkilla Kriittisen värähtelyn menetelmä Tehtiin kuvan 1 mukainen tasavirtamoottorin piiri PID-säätimellä. Virittämistä varten PID-säätimen ja asetettiin
I-Vinssi LM.60i 24V / I/O-net / 60NM. Sisältö Sovellukset 1 Ominaisuudet 1 Mitoitus 3 Varavirtalähde 3 Varusteet 4 Johdotus 5 Tekninen erittely 5
 I-Vinssi LM.60i 24V / I/O-net / 60NM A5332020 Sisältö Sovellukset 1 Ominaisuudet 1 Mitoitus 3 Varavirtalähde 3 Varusteet 4 Johdotus 5 Tekninen erittely 5 Sovellukset Käyttölaite ohjaa ilman sisääntuloluukkuja.
I-Vinssi LM.60i 24V / I/O-net / 60NM A5332020 Sisältö Sovellukset 1 Ominaisuudet 1 Mitoitus 3 Varavirtalähde 3 Varusteet 4 Johdotus 5 Tekninen erittely 5 Sovellukset Käyttölaite ohjaa ilman sisääntuloluukkuja.
Lego Mindstorms NXT. OPH oppimisympäristöjen kehittämishanke 2011-2013. (C) 2012 Oppimiskeskus Innokas! All Rights Reserved 1
 2012 Oppimiskeskus Innokas! All Rights Reserved 1") Lego Mindstorms NXT OPH oppimisympäristöjen kehittämishanke 2011-2013 (C) 2012 Oppimiskeskus Innokas! All Rights Reserved 1 Anturi- ja moottoriportit A B C 1 2 3 4 (C) 2012 Oppimiskeskus Innokas! All Rights
Lego Mindstorms NXT OPH oppimisympäristöjen kehittämishanke 2011-2013 (C) 2012 Oppimiskeskus Innokas! All Rights Reserved 1 Anturi- ja moottoriportit A B C 1 2 3 4 (C) 2012 Oppimiskeskus Innokas! All Rights
ESBE CRD122. Käyttöohje. Esbe CRD122 lämmönsäädin langattomalla ohjaimella. Kompakti lämmönsäädin paketti
 Esbe CRD122 lämmönsäädin langattomalla ohjaimella ESBE CRD122 Callidus koodi 211702 Käyttöohje Kompakti lämmönsäädin paketti säädin ja langaton huoneyksikkö LCD näyttö ja yksi käyttöpainike moottoriosassa
Esbe CRD122 lämmönsäädin langattomalla ohjaimella ESBE CRD122 Callidus koodi 211702 Käyttöohje Kompakti lämmönsäädin paketti säädin ja langaton huoneyksikkö LCD näyttö ja yksi käyttöpainike moottoriosassa
Mikrokontrollerikitit - väliraportti
 Mikrokontrollerikitit - väliraportti AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Hannu Leppinen 78673R Petri Niemelä 221643 Markus Peltola 84765H 27.3.2013 Työn kuvaus Projektityön tarkoituksena
Mikrokontrollerikitit - väliraportti AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Hannu Leppinen 78673R Petri Niemelä 221643 Markus Peltola 84765H 27.3.2013 Työn kuvaus Projektityön tarkoituksena
1. Hidaskäyntiset moottorit
 1. Hidaskäyntiset moottorit 1.1 Radiaalimäntämoottorit 1.1.1 Ulkoisin virtauskanavin varustetut moottorit Ulkoisin virtauskanavin varustettujen moottorien arvoja: (moottorikoon mukaan) - käyttöpainealue
1. Hidaskäyntiset moottorit 1.1 Radiaalimäntämoottorit 1.1.1 Ulkoisin virtauskanavin varustetut moottorit Ulkoisin virtauskanavin varustettujen moottorien arvoja: (moottorikoon mukaan) - käyttöpainealue
S13-02 Linear motor controller for CAN-bus
 S13-02 Linear motor controller for CAN-bus Projektisuunnitelman väliraportti AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Anna Vaskuri Jere Liukkonen 25.3.2013 Sisällysluettelo 1 Projektityön
S13-02 Linear motor controller for CAN-bus Projektisuunnitelman väliraportti AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Anna Vaskuri Jere Liukkonen 25.3.2013 Sisällysluettelo 1 Projektityön
LMM KARTING TEAM. Rungon perussäädöt
 Rungon perussäädöt 1. Aurauskulma 1. Auraus 2. Haritus Auraus ja haritus on kulma jolla etupyörien kulmat poikkeavat ajosuunnassa toisistaan. Auraus = pyörät on kääntynyt sisäänpäin. Haritus = pyörät sojottavat
Rungon perussäädöt 1. Aurauskulma 1. Auraus 2. Haritus Auraus ja haritus on kulma jolla etupyörien kulmat poikkeavat ajosuunnassa toisistaan. Auraus = pyörät on kääntynyt sisäänpäin. Haritus = pyörät sojottavat
Aurinkojärjestelmän syväpurkauksen ohjausyksikkö Suunnittelu Mikko Esala
 Aurinkojärjestelmän syväpurkauksen ohjausyksikkö Suunnittelu Mikko Esala Yleistä: Tämä laite on suunniteltu aurinkoenergia järjestelmiin, suojaamaan akkua syväpurkausta vastaan. Laite kytketään akun ja
Aurinkojärjestelmän syväpurkauksen ohjausyksikkö Suunnittelu Mikko Esala Yleistä: Tämä laite on suunniteltu aurinkoenergia järjestelmiin, suojaamaan akkua syväpurkausta vastaan. Laite kytketään akun ja
Yleistä ebmpapst-puhaltimista - Kuvaus teknisistä tiedoista AC
 Yleistä ebmpapst-puhaltimista - Kuvaus teknisistä tiedoista AC ULKOROOTTORIMOOTTORI Ulkoroottorimoottorin toimintaperiaate - esimerkkinä keskipakopuhallin eteenpäin kaartuvin siivin. Ulkoroottorimoottorissa
Yleistä ebmpapst-puhaltimista - Kuvaus teknisistä tiedoista AC ULKOROOTTORIMOOTTORI Ulkoroottorimoottorin toimintaperiaate - esimerkkinä keskipakopuhallin eteenpäin kaartuvin siivin. Ulkoroottorimoottorissa
LUMA SUOMI -kehittämisohjelma LUMA FINLAND -utvecklingsprogram LUMA FINLAND development programme Ohjelmointia Arduinolla
 Ohjelmointia Arduinolla Kyösti Blinnikka, Olarin koulu ja lukio LUMA-keskus Aalto Mikä on Arduino? Open Source Electronics Prototyping Platform Arduino on avoimeen laitteistoon ja ohjelmistoon perustuva
Ohjelmointia Arduinolla Kyösti Blinnikka, Olarin koulu ja lukio LUMA-keskus Aalto Mikä on Arduino? Open Source Electronics Prototyping Platform Arduino on avoimeen laitteistoon ja ohjelmistoon perustuva
Eye Pal Solo. Käyttöohje
 Eye Pal Solo Käyttöohje 1 Eye Pal Solon käyttöönotto Eye Pal Solon pakkauksessa tulee kolme osaa: 1. Peruslaite, joka toimii varsinaisena lukijana ja jonka etureunassa on laitteen ohjainpainikkeet. 2.
Eye Pal Solo Käyttöohje 1 Eye Pal Solon käyttöönotto Eye Pal Solon pakkauksessa tulee kolme osaa: 1. Peruslaite, joka toimii varsinaisena lukijana ja jonka etureunassa on laitteen ohjainpainikkeet. 2.
Liikkuva viihdekeskus
 Liikkuva viihdekeskus Opinnäyte Jere Kurvinen 21.5.2015 Etelä-Savon ammattiopisto Tieto- ja viestintätekniikka Käytöntuki SISÄLLYSLUETTELO 1 LIIKKUVA VIIHDEKESKUS... 1 2 ÄÄNENTOISTOLAITTEET... 1 2.1 Soittimen
Liikkuva viihdekeskus Opinnäyte Jere Kurvinen 21.5.2015 Etelä-Savon ammattiopisto Tieto- ja viestintätekniikka Käytöntuki SISÄLLYSLUETTELO 1 LIIKKUVA VIIHDEKESKUS... 1 2 ÄÄNENTOISTOLAITTEET... 1 2.1 Soittimen
KÄYTTÖ- JA TURVALLISUUSOHJE Hase Trets -nojapyörä
 KÄYTTÖ- JA TURVALLISUUSOHJE Hase Trets -nojapyörä Hase Trets soveltuu käytettäväksi tavallisena nojapyöränä tai peräpyöränä toiseen polkupyörään kiinnitettynä. Rungon pituutta voidaan muuttaa, joten pyörä
KÄYTTÖ- JA TURVALLISUUSOHJE Hase Trets -nojapyörä Hase Trets soveltuu käytettäväksi tavallisena nojapyöränä tai peräpyöränä toiseen polkupyörään kiinnitettynä. Rungon pituutta voidaan muuttaa, joten pyörä
a) Kuinka pitkän matkan punnus putoaa, ennen kuin sen liikkeen suunta kääntyy ylöspäin?
 Kuinka pitkän matkan punnus putoaa, ennen kuin sen liikkeen suunta kääntyy ylöspäin?") Luokka 3 Tehtävä 1 Pieni punnus on kiinnitetty venymättömän langan ja kevyen jousen välityksellä tukevaan kannattimeen. Alkutilanteessa punnusta kannatellaan käsin, ja lanka riippuu löysänä kuvan mukaisesti.
Luokka 3 Tehtävä 1 Pieni punnus on kiinnitetty venymättömän langan ja kevyen jousen välityksellä tukevaan kannattimeen. Alkutilanteessa punnusta kannatellaan käsin, ja lanka riippuu löysänä kuvan mukaisesti.
Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla.
 Speedohealer V4 Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla. 1. Esipuhe Onnittelemme sinua Speedohealer laitteen oston johdosta. HealTech Electronics Ltd. on omistautunut
Speedohealer V4 Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla. 1. Esipuhe Onnittelemme sinua Speedohealer laitteen oston johdosta. HealTech Electronics Ltd. on omistautunut
TKT224 KOODIN KOON OPTIMOINTI
 - 1 - Laboratoriotyö TKT224 Oppimäärä: Ammattiaineiden laboraatiot Kurssi: Tietokonetekniikan laboraatiot Laboratoriotyö: TKT224 KOODIN KOON OPTIMOINTI Teoriakurssi, johon työ liittyy: Työn laatijat: T.Laitinen
- 1 - Laboratoriotyö TKT224 Oppimäärä: Ammattiaineiden laboraatiot Kurssi: Tietokonetekniikan laboraatiot Laboratoriotyö: TKT224 KOODIN KOON OPTIMOINTI Teoriakurssi, johon työ liittyy: Työn laatijat: T.Laitinen
Fysiikan laboratoriotyöt 3 Sähkömotorinen voima
 Fysiikan laboratoriotyöt 3 Sähkömotorinen voima Työn suorittaja: Antti Pekkala (1988723) Mittaukset suoritettu 8.10.2014 Selostus palautettu 16.10.2014 Valvonut assistentti Martti Kiviharju 1 Annettu tehtävä
Fysiikan laboratoriotyöt 3 Sähkömotorinen voima Työn suorittaja: Antti Pekkala (1988723) Mittaukset suoritettu 8.10.2014 Selostus palautettu 16.10.2014 Valvonut assistentti Martti Kiviharju 1 Annettu tehtävä
ELEKTRONISET JÄRJESTELMÄT, LABORAATIO 1: Oskilloskoopin käyttö vaihtojännitteiden mittaamisessa ja Theveninin lähteen määritys yleismittarilla
 Chydenius Saku 8.9.2003 Ikävalko Asko ELEKTRONISET JÄRJESTELMÄT, LABORAATIO 1: Oskilloskoopin käyttö vaihtojännitteiden mittaamisessa ja Theveninin lähteen määritys yleismittarilla Työn valvoja: Pekka
Chydenius Saku 8.9.2003 Ikävalko Asko ELEKTRONISET JÄRJESTELMÄT, LABORAATIO 1: Oskilloskoopin käyttö vaihtojännitteiden mittaamisessa ja Theveninin lähteen määritys yleismittarilla Työn valvoja: Pekka
Fy06 Koe 20.5.2015 Kuopion Lyseon lukio (KK) 1/7
 1/7") Fy06 Koe 0.5.015 Kuopion Lyseon lukio (KK) 1/7 alitse kolme tehtävää. 6p/tehtävä. 1. Mitä mieltä olet seuraavista väitteistä. Perustele lyhyesti ovatko väitteet totta vai tarua. a. irtapiirin hehkulamput
Fy06 Koe 0.5.015 Kuopion Lyseon lukio (KK) 1/7 alitse kolme tehtävää. 6p/tehtävä. 1. Mitä mieltä olet seuraavista väitteistä. Perustele lyhyesti ovatko väitteet totta vai tarua. a. irtapiirin hehkulamput
MSnS-extra PCB v1.0. Kevyt käyttöohje
 MSnS-extra PCB v1.0 Kevyt käyttöohje Liittimet 9-napainen pyöreä liitin Tällä liittimellä kytketään kaikki isompaa virrankestoa vaativat signaalit. Liitin on AMP:in valmistama CPC-sarjan vesitiivis versio.
MSnS-extra PCB v1.0 Kevyt käyttöohje Liittimet 9-napainen pyöreä liitin Tällä liittimellä kytketään kaikki isompaa virrankestoa vaativat signaalit. Liitin on AMP:in valmistama CPC-sarjan vesitiivis versio.
Tee-se-itse.fi Ja saat sellaisen, kuin sattuu tulemaan! http://www.tee-se-itse.fi
 Baarikaappi Jatketaanpa samoilla linjoilla kuin edellisessä artikkelissa "tynnyrin mallinen baarikappi". Tällä kertaa esitellään hieman tavanomaisempi baarikaappi, joka on myöskin huomattavasti helpompi
Baarikaappi Jatketaanpa samoilla linjoilla kuin edellisessä artikkelissa "tynnyrin mallinen baarikappi". Tällä kertaa esitellään hieman tavanomaisempi baarikaappi, joka on myöskin huomattavasti helpompi
Luvun 5 laskuesimerkit
 Luvun 5 laskuesimerkit Huom: luvun 4 kohdalla luennolla ei ollut laskuesimerkkejä, vaan koko luvun 5 voi nähdä kokoelmana sovellusesimerkkejä edellisen luvun asioihin! Esimerkki 5.1 Moottori roikkuu oheisen
Luvun 5 laskuesimerkit Huom: luvun 4 kohdalla luennolla ei ollut laskuesimerkkejä, vaan koko luvun 5 voi nähdä kokoelmana sovellusesimerkkejä edellisen luvun asioihin! Esimerkki 5.1 Moottori roikkuu oheisen
Projektisuunnitelma: Vesipistekohtainen veden kulutuksen seuranta, syksy Mikko Kyllönen Matti Marttinen Vili Tuomisaari
 Projektisuunnitelma: Vesipistekohtainen veden kulutuksen seuranta, syksy 2015 Mikko Kyllönen Matti Marttinen Vili Tuomisaari Projektin tavoite Tämän projektin tavoitteena on kehittää prototyyppi järjestelmästä,
Projektisuunnitelma: Vesipistekohtainen veden kulutuksen seuranta, syksy 2015 Mikko Kyllönen Matti Marttinen Vili Tuomisaari Projektin tavoite Tämän projektin tavoitteena on kehittää prototyyppi järjestelmästä,
KÄYTTÖOHJE. M2M Point - to - Point
 KÄYTTÖOHJE M2M Point - to - Point M2M Paketti SISÄLLYSLUETTELO YLEISTÄ 1 KÄYTTÖÖNOTTO 1.1 LAITTEISTON ASENNUS 2 TULOJEN JA LÄHTÖJEN KYTKENTÄ 2.1 TILATIETOKYTKENNÄT 2.2 ANALOGIAKYTKENNÄT 3 KANAVANVAIHTO
KÄYTTÖOHJE M2M Point - to - Point M2M Paketti SISÄLLYSLUETTELO YLEISTÄ 1 KÄYTTÖÖNOTTO 1.1 LAITTEISTON ASENNUS 2 TULOJEN JA LÄHTÖJEN KYTKENTÄ 2.1 TILATIETOKYTKENNÄT 2.2 ANALOGIAKYTKENNÄT 3 KANAVANVAIHTO
ONE 118 OHJELMOITAVA PÄÄVAHVISTIN
 10 ohjelmoitavaa UHF- kanavanippua 3 erillistä UHF tuloa; UHF1 UHF2 UHF3 Laajakaistatulo VHF I +ULA Laajakaistatulo VHF III + DAB UHF filtteri 1 5 kanavan levyinen; 8-40 MHz Automaattinen skannaus UHF-
10 ohjelmoitavaa UHF- kanavanippua 3 erillistä UHF tuloa; UHF1 UHF2 UHF3 Laajakaistatulo VHF I +ULA Laajakaistatulo VHF III + DAB UHF filtteri 1 5 kanavan levyinen; 8-40 MHz Automaattinen skannaus UHF-
Moottoroitu nousutuki II
 AS-84.3284 Automaatiotekniikan projektityöt (kesä 2008) Moottoroitu nousutuki II Teemu Kuusisto 4.7.2008 Työn ohjaaja: Panu Harmo TÄMÄ TYÖ KUULUU OPISKELIJOIDEN MIDE-TEKNOLOGIA- PROJEKTIIN "YLÄMUMMO HEILAHTAA"
AS-84.3284 Automaatiotekniikan projektityöt (kesä 2008) Moottoroitu nousutuki II Teemu Kuusisto 4.7.2008 Työn ohjaaja: Panu Harmo TÄMÄ TYÖ KUULUU OPISKELIJOIDEN MIDE-TEKNOLOGIA- PROJEKTIIN "YLÄMUMMO HEILAHTAA"
ABT VAIJERIVINTTURI NOSTOON VAVIN300EL, VAVIN500EL, VAVIN1000EL JA VAVIN3500EL
 ABT VAIJERIVINTTURI NOSTOON VAVIN300EL, VAVIN500EL, VAVIN1000EL JA VAVIN3500EL 1. Käyttö Vinssi on tehty käytettäväksi varastoissa, rakennuksilla jne. Vinssejä on sekä 230V että 400V käyttöjännitteelle,
ABT VAIJERIVINTTURI NOSTOON VAVIN300EL, VAVIN500EL, VAVIN1000EL JA VAVIN3500EL 1. Käyttö Vinssi on tehty käytettäväksi varastoissa, rakennuksilla jne. Vinssejä on sekä 230V että 400V käyttöjännitteelle,
EA Sähköiset ilmanlämmittimet
 Sähköiset ilmanlämmittimet Sähköinen kiinteä ilmanlämmitin on sarja sähkökäyttöisiä ilmanlämmittimiä, joiden tehoalue on laaja. Nämä lämmittimet on tarkoitettu varastojen, teollisuushallien, paikoitustilojen,
Sähköiset ilmanlämmittimet Sähköinen kiinteä ilmanlämmitin on sarja sähkökäyttöisiä ilmanlämmittimiä, joiden tehoalue on laaja. Nämä lämmittimet on tarkoitettu varastojen, teollisuushallien, paikoitustilojen,
Moottorin kierrosnopeus Tämän harjoituksen jälkeen:
 Moottorin kierrosnopeus Tämän harjoituksen jälkeen: osaat määrittää moottorin kierrosnopeuden pulssianturin ja Counter-sisääntulon avulla, osaat siirtää manuaalisesti mittaustiedoston LabVIEW:sta MATLABiin,
Moottorin kierrosnopeus Tämän harjoituksen jälkeen: osaat määrittää moottorin kierrosnopeuden pulssianturin ja Counter-sisääntulon avulla, osaat siirtää manuaalisesti mittaustiedoston LabVIEW:sta MATLABiin,
1. Juota vastukset R1 (47ohm tai 33ohm) ja R3 (15ohm) paikoilleen.
 ja R3 (15ohm) paikoilleen.") Asennusohje. Jarrunsäätökytkimen valmistelut: 0. Avaa kytkimen kiinnitysmutteri, poista prikka ja aseta rajoitin kynsi asentoon 10. Varmista, että kytkin ei ole siinä asennossa. Nyt kytkimestä tulisi löytyä
Asennusohje. Jarrunsäätökytkimen valmistelut: 0. Avaa kytkimen kiinnitysmutteri, poista prikka ja aseta rajoitin kynsi asentoon 10. Varmista, että kytkin ei ole siinä asennossa. Nyt kytkimestä tulisi löytyä
Metropolia AMK BOSCH REXROTH HYDRAULIPENKIN KONSEPTISUUNNITTELU
 BOSCH REXROTH HYDRAULIPENKIN KONSEPTISUUNNITTELU 1. Konsepti Nykyisestä penkistä päivitetty versio, 315 kw käyttöteholla. Avoimen ja suljetun piirin pumput sekä hydraulimootorit testataan samassa asemassa.
BOSCH REXROTH HYDRAULIPENKIN KONSEPTISUUNNITTELU 1. Konsepti Nykyisestä penkistä päivitetty versio, 315 kw käyttöteholla. Avoimen ja suljetun piirin pumput sekä hydraulimootorit testataan samassa asemassa.
DEE Sähkömoottorikäyttöjen laboratoriotyöt. Tasavirtakäyttö
 Tasavirtakäyttö 1 Esiselostus 1.1 Mitä laitteita kuuluu Leonard-käyttöön, mikä on sen toimintaperiaate ja mihin ja miksi niitä käytetään? Luettele myös Leonard-käytön etuja ja haittoja. Kuva 1.1 Leonard-käyttö.
Tasavirtakäyttö 1 Esiselostus 1.1 Mitä laitteita kuuluu Leonard-käyttöön, mikä on sen toimintaperiaate ja mihin ja miksi niitä käytetään? Luettele myös Leonard-käytön etuja ja haittoja. Kuva 1.1 Leonard-käyttö.
Apollo SPEEDY Syöttölaite
 Perkkoonkatu 5 Puh. 010 420 72 72 www.keyway.fi 33850 Tampere Fax. 010 420 72 77 palvelu@keyway.fi Apollo SPEEDY Syöttölaite PLC - Ohjaus Askelmoottori Syöttö pituus : 1 12 m Vahva, alumiini rakenne Moottori
Perkkoonkatu 5 Puh. 010 420 72 72 www.keyway.fi 33850 Tampere Fax. 010 420 72 77 palvelu@keyway.fi Apollo SPEEDY Syöttölaite PLC - Ohjaus Askelmoottori Syöttö pituus : 1 12 m Vahva, alumiini rakenne Moottori
KRSC 9011/1 KRSC 9006 KRSF 9005/SL KRSF 9005/BL. Asennusohjeet
 KRSC 9011/1 KRSC 9006 KRSF 9005/SL KRSF 9005/BL Asennusohjeet Ennen jääkaapin asentamista 4 Vesiliitäntä 4 Sähköliitäntä 5 Jääkaapin sijoitus ja tasapainottaminen 6 Asennusmitat ja -vaatimukset 7 Pakastimen
KRSC 9011/1 KRSC 9006 KRSF 9005/SL KRSF 9005/BL Asennusohjeet Ennen jääkaapin asentamista 4 Vesiliitäntä 4 Sähköliitäntä 5 Jääkaapin sijoitus ja tasapainottaminen 6 Asennusmitat ja -vaatimukset 7 Pakastimen
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt. Projektisuunnitelma. A10-14 Automaattinen pesäpallolukkari
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Projektisuunnitelma A10-14 Automaattinen pesäpallolukkari Dani Anttila Olli Mäentaka Reidar Udd 9/21/2010 Määritellään projektin tavoite, aikataulu
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Projektisuunnitelma A10-14 Automaattinen pesäpallolukkari Dani Anttila Olli Mäentaka Reidar Udd 9/21/2010 Määritellään projektin tavoite, aikataulu
S12-11. Portaalinosturi AS-0.3200. Projektisuunnitelma 2012. Oleg Kovalev
 S12-11 Portaalinosturi AS-0.3200 Projektisuunnitelma 2012 Oleg Kovalev Sisällys 1. Työn tavoite... 3 2. Projektin osa-alueet... 3 2.1. Suunnittelu... 3 2.2. Komponenttien hankinta... 3 2.3. Valmistus...
S12-11 Portaalinosturi AS-0.3200 Projektisuunnitelma 2012 Oleg Kovalev Sisällys 1. Työn tavoite... 3 2. Projektin osa-alueet... 3 2.1. Suunnittelu... 3 2.2. Komponenttien hankinta... 3 2.3. Valmistus...
Ongelmia mittauksissa Ulkoiset häiriöt
 Ongelmia mittauksissa Ulkoiset häiriöt Häiriöt peittävät mitattavia signaaleja Häriölähteitä: Sähköverkko 240 V, 50 Hz Moottorit Kytkimet Releet, muuntajat Virtalähteet Loisteputkivalaisimet Kännykät Radiolähettimet,
Ongelmia mittauksissa Ulkoiset häiriöt Häiriöt peittävät mitattavia signaaleja Häriölähteitä: Sähköverkko 240 V, 50 Hz Moottorit Kytkimet Releet, muuntajat Virtalähteet Loisteputkivalaisimet Kännykät Radiolähettimet,
TIES530 TIES530. Moniprosessorijärjestelmät. Moniprosessorijärjestelmät. Miksi moniprosessorijärjestelmä?
 Miksi moniprosessorijärjestelmä? Laskentaa voidaan hajauttaa useammille prosessoreille nopeuden, modulaarisuuden ja luotettavuuden vaatimuksesta tai hajauttaminen voi helpottaa ohjelmointia. Voi olla järkevää
Miksi moniprosessorijärjestelmä? Laskentaa voidaan hajauttaa useammille prosessoreille nopeuden, modulaarisuuden ja luotettavuuden vaatimuksesta tai hajauttaminen voi helpottaa ohjelmointia. Voi olla järkevää
AUTON LIIKETEHTÄVIÄ: KESKIKIIHTYVYYS ak JA HETKELLINEN KIIHTYVYYS a(t) (tangenttitulkinta) sekä matka fysikaalisena pinta-alana (t,
 (tangenttitulkinta) sekä matka fysikaalisena pinta-alana (t,") AUTON LIIKETEHTÄVIÄ: KESKIKIIHTYVYYS ak JA HETKELLINEN KIIHTYVYYS a(t) (tangenttitulkinta) sekä matka fysikaalisena pinta-alana (t, v)-koordinaatistossa ruutumenetelmällä. Tehtävä 4 (~YO-K97-1). Tekniikan
AUTON LIIKETEHTÄVIÄ: KESKIKIIHTYVYYS ak JA HETKELLINEN KIIHTYVYYS a(t) (tangenttitulkinta) sekä matka fysikaalisena pinta-alana (t, v)-koordinaatistossa ruutumenetelmällä. Tehtävä 4 (~YO-K97-1). Tekniikan
12.5 ECO IKÄSUOSITUS: 2-5 v RACING IKÄSUOSITUS: 2-5 v.
 2017 Ajamisen opettelu ei vielä koskaan ole ollut näin yksinkertaista ja turvallista. OSET -sähkömopot ovat kevyitä, rakenteeltaan yksinkertaisia ja hämmästyttävän helppokäyttöisiä. Näillä pyörillä voidaan
2017 Ajamisen opettelu ei vielä koskaan ole ollut näin yksinkertaista ja turvallista. OSET -sähkömopot ovat kevyitä, rakenteeltaan yksinkertaisia ja hämmästyttävän helppokäyttöisiä. Näillä pyörillä voidaan
WGS - Quick-Lock-pikavaihtojärjestelmä
 B:01 WGS Quick-Lock-pikavaihtojärjestelmän etuja WGS Quick-Lock-järjestelmä koostuu kahdesta osasta. Yksi osa (WGS QLRD) asennetaan robottiin ja toiseen osaan (WGS-QLGD) rakennat tarttujasi. Tarttujan
B:01 WGS Quick-Lock-pikavaihtojärjestelmän etuja WGS Quick-Lock-järjestelmä koostuu kahdesta osasta. Yksi osa (WGS QLRD) asennetaan robottiin ja toiseen osaan (WGS-QLGD) rakennat tarttujasi. Tarttujan
Fysiikan valintakoe 10.6.2014, vastaukset tehtäviin 1-2
 Fysiikan valintakoe 10.6.2014, vastaukset tehtäviin 1-2 1. (a) W on laatikon paino, F laatikkoon kohdistuva vetävä voima, F N on pinnan tukivoima ja F s lepokitka. Kuva 1: Laatikkoon kohdistuvat voimat,
Fysiikan valintakoe 10.6.2014, vastaukset tehtäviin 1-2 1. (a) W on laatikon paino, F laatikkoon kohdistuva vetävä voima, F N on pinnan tukivoima ja F s lepokitka. Kuva 1: Laatikkoon kohdistuvat voimat,
Torqeedo. Palkittu, suorituskykyinen sähköperämoottori.
 Torqeedo. Palkittu, suorituskykyinen sähköperämoottori. Torqeedo on veneilijän tulevaisuutta. Perämoottori, joka menestyy sitä paremmin, mitä tiukemmaksi ympäristömääräykset käyvät. Markkinoiden tehokkaimmat
Torqeedo. Palkittu, suorituskykyinen sähköperämoottori. Torqeedo on veneilijän tulevaisuutta. Perämoottori, joka menestyy sitä paremmin, mitä tiukemmaksi ympäristömääräykset käyvät. Markkinoiden tehokkaimmat
SeekTech SR-20 Paikannin Kevyt mutta silti lujarakenteinen vastaanotin, joka antaa kaikki nopean ja tarkan paikannuksen tarvitsemat tiedot.
 SeekTech SR-20 Paikannin Kevyt mutta silti lujarakenteinen vastaanotin, joka antaa kaikki nopean ja tarkan paikannuksen tarvitsemat tiedot. Helppokäyttöinen Kohdejohto ja suuntanuolet tunnistavat nopeasti
SeekTech SR-20 Paikannin Kevyt mutta silti lujarakenteinen vastaanotin, joka antaa kaikki nopean ja tarkan paikannuksen tarvitsemat tiedot. Helppokäyttöinen Kohdejohto ja suuntanuolet tunnistavat nopeasti
Harjoitustyö - Mikroprosessorit Liikennevalot
 Saku Chydenius tammikuu 2004 Asko Ikävalko Harjoitustyö - Mikroprosessorit Liikennevalot Työn valvoja: Kimmo Saurén RAPORTTI 1(8) 1. Alkuperäinen tehtävänanto 2. Määritelmä valojen vaihtumiselle Muodosta
Saku Chydenius tammikuu 2004 Asko Ikävalko Harjoitustyö - Mikroprosessorit Liikennevalot Työn valvoja: Kimmo Saurén RAPORTTI 1(8) 1. Alkuperäinen tehtävänanto 2. Määritelmä valojen vaihtumiselle Muodosta
TANSUN QUARTZHEAT. Käyttöohje. Algarve UK:N & EUROOPAN MALLIT: ALG 513UK & ALG 513EU. Valmistaja: Tansun Limited
 TANSUN QUARTZHEAT Käyttöohje Algarve UK:N & EUROOPAN MALLIT: ALG 513UK & ALG 513EU Valmistaja: Tansun Limited Asiakaspalvelukysymyksissä, ota yhteyttä maahantuojaan: Proviter Oy Tullikatu 12 A 4 21100
TANSUN QUARTZHEAT Käyttöohje Algarve UK:N & EUROOPAN MALLIT: ALG 513UK & ALG 513EU Valmistaja: Tansun Limited Asiakaspalvelukysymyksissä, ota yhteyttä maahantuojaan: Proviter Oy Tullikatu 12 A 4 21100
XCRANE OMINAISUUDET KUUSI KULJETTAJA-PROFIILIA VENTTIILIEN SÄÄDÖT
 XCRANE OMINAISUUDET KUUSI KULJETTAJA-PROFIILIA Jokaiseen kuljettajaprofiiliin voi tallentaa omat säädöt seuraaville ominaisuuksille Venttiilin parametrit o Miniminopeus (ma) o Maksiminopeus (%) o Rampit
XCRANE OMINAISUUDET KUUSI KULJETTAJA-PROFIILIA Jokaiseen kuljettajaprofiiliin voi tallentaa omat säädöt seuraaville ominaisuuksille Venttiilin parametrit o Miniminopeus (ma) o Maksiminopeus (%) o Rampit
LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi. Servokäyttö (0,9 op)
") LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi Servokäyttö (0,9 op) JOHDNTO Työssä tarkastellaan kestomagnetoitua tasavirtamoottoria. oneelle viritetään PI-säätäjä
LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi Servokäyttö (0,9 op) JOHDNTO Työssä tarkastellaan kestomagnetoitua tasavirtamoottoria. oneelle viritetään PI-säätäjä
Nosturirobotti. robotin tarkoitus. mikä on robotin tehtävä. Kurssin robottiohjelmointi, kesä 2011 harjoitustyö
 Kurssin robottiohjelmointi, kesä 2011 harjoitustyö Juha Hämäläinen (juha.h.hamalainen@jyu.fi) Jussi Jokinen (jussi.p.p.jokinen@jyu.fi) Videoita robotin toiminnasta: http://www.youtube.com/user/hamismies
Kurssin robottiohjelmointi, kesä 2011 harjoitustyö Juha Hämäläinen (juha.h.hamalainen@jyu.fi) Jussi Jokinen (jussi.p.p.jokinen@jyu.fi) Videoita robotin toiminnasta: http://www.youtube.com/user/hamismies
ComfortControl 01 KEINUN LUKITUS 02 KEINUN VASTUS 05 SELKÄNOJAN KORKEUS 03 ISTUINSYVYYS 06 SELKÄNOJAN KALLISTUS 04 ISTUINKORKEUS 07 KÄSINOJAT KORKEUS
 Vaihe 1: Avaa tuolisi lukitus. 01 KEINUN LUKITUS Vaihe 2: Säädä tuoli kehosi mukaan. 02 KEINUN VASTUS 03 ISTUINSYVYYS 04 ISTUINKORKEUS Vaihe 3: Säädä tuoli työsi mukaan. 05 SELKÄNOJAN KORKEUS 06 SELKÄNOJAN
Vaihe 1: Avaa tuolisi lukitus. 01 KEINUN LUKITUS Vaihe 2: Säädä tuoli kehosi mukaan. 02 KEINUN VASTUS 03 ISTUINSYVYYS 04 ISTUINKORKEUS Vaihe 3: Säädä tuoli työsi mukaan. 05 SELKÄNOJAN KORKEUS 06 SELKÄNOJAN
Electric power steering
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Electric power steering Ohjausmoottorin jäähdytys ja ylikuumenemisen esto Projektisuunnitelma 19.9.2014 Työn ohjaaja: Ville Matikainen Tekijät: Samppa
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Electric power steering Ohjausmoottorin jäähdytys ja ylikuumenemisen esto Projektisuunnitelma 19.9.2014 Työn ohjaaja: Ville Matikainen Tekijät: Samppa
S-108.3020 Elektroniikan häiriökysymykset. Laboratoriotyö, kevät 2010
 1/7 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö, kevät 2010 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä Viimeksi päivitetty 25.2.2010 / MO 2/7 Johdanto Sähköisiä
1/7 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö, kevät 2010 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä Viimeksi päivitetty 25.2.2010 / MO 2/7 Johdanto Sähköisiä
CONSTANT FINESS SUNFLEX
 Tamar terassimarkiisien asennus ja käyttöohje CONSTNT FINESS SUNFLEX 4 5 6 Markiisin osat ja mitat Kiinnikkeiden sijoittelu Kaltevuuden säätö Nivelvarsien säätö samaan tasoon Käyttö ja hoito www.tamar.fi
Tamar terassimarkiisien asennus ja käyttöohje CONSTNT FINESS SUNFLEX 4 5 6 Markiisin osat ja mitat Kiinnikkeiden sijoittelu Kaltevuuden säätö Nivelvarsien säätö samaan tasoon Käyttö ja hoito www.tamar.fi
IIZE3010 Elektroniikan perusteet Harjoitustyö. Pasi Vähämartti, C1303, IST4SE
 IIZE3010 Elektroniikan perusteet Harjoitustyö Pasi Vähämartti, C1303, IST4SE 2 (11) Sisällysluettelo: 1. Tehtävänanto...3 2. Peruskytkentä...4 2.1. Peruskytkennän käyttäytymisanalyysi...5 3. Jäähdytyksen
IIZE3010 Elektroniikan perusteet Harjoitustyö Pasi Vähämartti, C1303, IST4SE 2 (11) Sisällysluettelo: 1. Tehtävänanto...3 2. Peruskytkentä...4 2.1. Peruskytkennän käyttäytymisanalyysi...5 3. Jäähdytyksen
Yleishimmentimellä varustetun, uppoasennettavan WMR-252-vastaanottimen käyttöopas
 Yleishimmentimellä varustetun, uppoasennettavan WMR-252-vastaanottimen käyttöopas Ainutlaatuinen, himmennystoiminnolla varustettu langaton yleisvastaanotin esimerkiksi himmennettävien 230 voltin LEDvalojen,
Yleishimmentimellä varustetun, uppoasennettavan WMR-252-vastaanottimen käyttöopas Ainutlaatuinen, himmennystoiminnolla varustettu langaton yleisvastaanotin esimerkiksi himmennettävien 230 voltin LEDvalojen,
Multivibraattorit. Bistabiili multivibraattori:
 Multivibraattorit Elektroniikan piiri jota käytetään erilaisissa kahden tason systeemeissä kuten oskillaattorit, ajastimet tai kiikkut. Multivibraattorissa on vahvistava elementtti ja ristiinkytketyt rvastukset
Multivibraattorit Elektroniikan piiri jota käytetään erilaisissa kahden tason systeemeissä kuten oskillaattorit, ajastimet tai kiikkut. Multivibraattorissa on vahvistava elementtti ja ristiinkytketyt rvastukset
RAIDETESTERIN KÄYTTÖOHJE
 RAIDETESTERIN KÄYTTÖOHJE Yleiskuvaus Mittalaite tutkiin virtapiirin johtavuutta ja ilmaisee virtapiirissä olevan puhtaasti resistiivisen vastuksen. Mittalaitteen toiminnallisuus on parhaimmillaan, kun
RAIDETESTERIN KÄYTTÖOHJE Yleiskuvaus Mittalaite tutkiin virtapiirin johtavuutta ja ilmaisee virtapiirissä olevan puhtaasti resistiivisen vastuksen. Mittalaitteen toiminnallisuus on parhaimmillaan, kun
Projektityöt. Sami Alaiso, Jyri Lujanen 30. marraskuuta 2009
 Projektityöt Sami Alaiso, Jyri Lujanen 30. marraskuuta 2009 1 1 Yleistä Projektityön tarkoituksena oli suunnitella ja toteuttaa yleiskäyttöinen CAN-ohjain, jolla voidaan vastaanottaa viestejä CAN-väylältä,
Projektityöt Sami Alaiso, Jyri Lujanen 30. marraskuuta 2009 1 1 Yleistä Projektityön tarkoituksena oli suunnitella ja toteuttaa yleiskäyttöinen CAN-ohjain, jolla voidaan vastaanottaa viestejä CAN-väylältä,
LED- päivyrinäyttö. 1: Anssi Kalliomäki, Marko Virtanen, Tomas Truedsson, Petri Syvälähde
 1: Anssi Kalliomäki, Marko Virtanen, Tomas Truedsson, Petri Syvälähde LED- päivyrinäyttö Ohjeet on kirjoitettu sinisellä. Poista ne lopullisesta dokumentista ja korvaa oikeilla tiedoilla. Sisällys Lyhenteet
1: Anssi Kalliomäki, Marko Virtanen, Tomas Truedsson, Petri Syvälähde LED- päivyrinäyttö Ohjeet on kirjoitettu sinisellä. Poista ne lopullisesta dokumentista ja korvaa oikeilla tiedoilla. Sisällys Lyhenteet
LOPPURAPORTTI 19.11.2007. Lämpötilahälytin. 0278116 Hans Baumgartner xxxxxxx nimi nimi
 LOPPURAPORTTI 19.11.2007 Lämpötilahälytin 0278116 Hans Baumgartner xxxxxxx nimi nimi KÄYTETYT MERKINNÄT JA LYHENTEET... 3 JOHDANTO... 4 1. ESISELOSTUS... 5 1.1 Diodi anturina... 5 1.2 Lämpötilan ilmaisu...
LOPPURAPORTTI 19.11.2007 Lämpötilahälytin 0278116 Hans Baumgartner xxxxxxx nimi nimi KÄYTETYT MERKINNÄT JA LYHENTEET... 3 JOHDANTO... 4 1. ESISELOSTUS... 5 1.1 Diodi anturina... 5 1.2 Lämpötilan ilmaisu...
Parasta ammunnanharjoitteluun
 Parasta ammunnanharjoitteluun Edut Objektiivinen suorituskykyanalyysi Tarkka mittaus Kompakti, kevyt ja helppokäyttöinen Yleiskiinnike useimpiin urheiluaseisiin Helppo kohdistus Todellinen ammuntaetäisyys
Parasta ammunnanharjoitteluun Edut Objektiivinen suorituskykyanalyysi Tarkka mittaus Kompakti, kevyt ja helppokäyttöinen Yleiskiinnike useimpiin urheiluaseisiin Helppo kohdistus Todellinen ammuntaetäisyys
Kuva 1. Ohmin lain kytkentäkaavio. DC; 0 6 V.
 TYÖ 37. OHMIN LAKI Tehtävä Tutkitaan metallijohtimen päiden välille kytketyn jännitteen ja johtimessa kulkevan sähkövirran välistä riippuvuutta. Todennetaan kokeellisesti Ohmin laki. Välineet Tasajännitelähde
TYÖ 37. OHMIN LAKI Tehtävä Tutkitaan metallijohtimen päiden välille kytketyn jännitteen ja johtimessa kulkevan sähkövirran välistä riippuvuutta. Todennetaan kokeellisesti Ohmin laki. Välineet Tasajännitelähde
Tehokas ledivalaisin 30 valkoisella ledillä. Käyttöjännite 12 20V. Nimellisvirta on noin 0.10A - 0.35A Suunnittelija Mikko Esala.
 Tehokas ledivalaisin 30 valkoisella ledillä. Käyttöjännite 20V. Nimellisvirta on noin 0.10A - 0.35A Suunnittelija Mikko Esala. Valaisimen ledit on kytketty kolmen ledin sarjoihin. Näitä ledisarjoja taas
Tehokas ledivalaisin 30 valkoisella ledillä. Käyttöjännite 20V. Nimellisvirta on noin 0.10A - 0.35A Suunnittelija Mikko Esala. Valaisimen ledit on kytketty kolmen ledin sarjoihin. Näitä ledisarjoja taas