Arduino tutuksi. Kyösti Blinnikka
|
|
|
- Asta Katajakoski
- 6 vuotta sitten
- Katselukertoja:
Transkriptio


1 Arduino tutuksi Kyösti Blinnikka
2
 - tuottaa ääntä Arduinolla - ohjata servoa - ohjata sähkömoottoria - säätää tehoa (PWM ledin himmentäminen/moottorin kierrosluvun")

3 Arduino tutuksi Tämän oppaan työt tehtyäsi sinulla on perustiedot ja -taidot - tehdä ledivilkkusysteemejä Arduinolla - kytkeä painonappeja Arduinoon - mitata jännitettä Arduinolla ( pariston jännitteen mittaus, lämpötilan mittaus, valaistuksen mittaus) - tuottaa ääntä Arduinolla - ohjata servoa - ohjata sähkömoottoria - säätää tehoa (PWM ledin himmentäminen/moottorin kierrosluvun säätäminen) - mitata etäisyyksiä Arduinoon liitetyllä ultraäänianturilla - liittää LCD-näyttö Arduinoon Näitä palikoita voit käyttää monien laitteiden suunnitteluun ja kokeiluun. Samalla kun kokeilet erilaisia kytkentöjä ja ohjelmia, opit paljon sähköisten laitteiden toiminnasta Materiaali soveltuu erityisesti yläkoulun tai lukion Arduino- tai ohjelmointikurssien aineistoksi. Alun tutkimustehtävät (ledin vilkuttelu, painonapin lukeminen, jännitteen mittaaminen) on syytä käydä aluksi huolella läpi. Muutoin tehtävien järjestys on vapaa. * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * Koekytkentäalustaan liittyvät kuvat on tehty Fritzing-ohjelmalla piirikaaviokuvat Inkscape-ohjelmalla Valokuvat Kyösti Blinnikka. Kiitokset LUMA-keskus Aallolle ja LUMARTS-laboratoriolle työn tukemisesta. ISBN Tämä teos on lisensoitu Creative Commons Nimeä-EiKaupallinen-JaaSamoin 4.0 Kansainvälinen -lisenssillä. Tarkastele lisenssiä osoitteessa Kyösti Blinnikka 9/2016 kyosti.blinnikka@gmail.com
4 Sisällys Arduino... 5 Arduinon osat... 5 Koekytkentälevy... 6 Ohjelmointiympäristö... 7 Ensimmäinen ohjelma BLINK... 8 LEDin vilkuttelu, liikennevalot RGB-ledi Ohjelman rakenteita, FOR-silmukka Painonapin lukeminen Jännitteen mittaaminen analoginen input Jännitteenjakaja potentiometrin lukeman lukeminen Äänen tuottaminen Lämpötilan mittaaminen Valaistuksen mittaaminen Servon ohjaaminen Arduinolla PWM Pulse Width Modulation Moottorin ohjaaminen Arduinolla Ultraäänianturin liittäminen Arduinoon LCD-näytön liittäminen Arduinoon Oman funktion tekeminen Oman laitteen tekeminen projektityö Kertausta: peruskytkennät Ohjelman ohjausrakenteita Toistolauseet Vastusten värikoodi Projektityö Harjoitustyöt Tutkimuksissa tarvittavat välineet ja komponentit... 63
5 Arduino Open Source Electronics Prototyping Platform Arduino/Genuino on avoimeen laitteistoon ja ohjelmistoon perustuva mikrokontrolleri-elektroniikka-alusta ja ohjelmointiympäristö. Arduinon avulla toteutetussa laitteessa on kaksi kokonaisuutta: Arduinoon liitetty ulkoinen kytkentä ja Arduinoon syötetty ohjelma. Arduinokortin INPUT-napoihin voi liittää erilaisia antureita, säätimiä tai kytkimiä, jotka ohjaavat OUTPUTnapoihin kytkettyjä ledejä, releitä, servoja tai moottoreita. Laitteen toiminnot määritetään laitteeseen syötetyllä ohjelmalla. Arduino-ympäristö tarjoaa helpon ja halvan keinon opetella elektroniikkaa ja ohjelmointia nykyaikaisella tavalla. Arduino on hyvin avoin konsepti ja erilaisia *duino-tuotteita myydään nettikauppojen välityksellä huokeaan hintaan. Euroopassa aidot Arduino-tuotteet myydään Genuino-nimen alla. Projektin kotisivu on osoitteessa Arduinon osat Arduino Uno on suosituin Arduino-alusta. USB-liitin koodin ja virran syöttö Reset-nappula 14 digitaalista kytkentäpinniä (voidaan ohjelmallisesti määrittää joko INPUT-tai OUTPUT-pinneiksi) LOW = 0 = 0 V HIGH = 1 = +5 V Ulkoinen virransyöttö (6 15 V, 2,1 mm virtaliitin tai Vin -pinni) Pinniin 13 kytketty ledi Mikrokontrolleri Virtaliitäntä kytkentöjä varten, 5 V, GND (0 V eli maa) 6 analogista kytkentäpinniä A0 A5 lukevat jännitettä 0 5 V K.Blinnikka: Arduino tutuksi 5

.")
6 Koekytkentälevy Kokeilukytkennät kannattaa rakentaa koekytkentälevylle. Koekytkentälevy (engl. Breadboard) on alusta, jolle voi koota kytkennän tarvitsematta juottaa komponentteja kiinni. Laitteet toteutetaan sijoittamalla komponentit koekytkentälevylle, jolloin samassa rivissä olevat komponenttien pinnit ovat yhteydessä toisiinsa. Ulkoiset liitokset Arduinoon ja muihin komponentteihin tehdään hyppylangoilla Arduino/Genuino Starter Kit on aloittelevalle harrastajalle sopiva sarja, jossa Arduinokortin, komponenttien ja kattavan ohjekirjan lisäksi saa rakentelualustan, jossa samalle alustalle on asennettu Arduino Uno ja koekytkentälevy (kuva alla). Hieman halvemmalla alkuun pääsee hankkimalla pelkän Arduinokortin ja koekytkentälevyn. Tällöin muut komponentit täytyy kuitenkin hankkia erikseen. Liitteessä 1 on lueteltu töissä tarvittavat osat ja komponentit. Tutkimustöiden kytkentäkuvat on piirretty toteutettavaksi Starter Kitillä. Pystyrivit samaa johdinta. Tähän kytketään yleensä virransyöttö +5 V ja 0 V (GND) Vaakarivit samaa johdinta. Tähän kootaan varsinainen kytkentä Komponentit asetetaan koekytkentälevyn keskellä olevalle alueella, jossa on kahdessa lohkossa kytkentäpisteet. Reunoilla kulkevat virtajohtimille tarkoitetut reikärivit on merkitty punaisella ja mustalla viivalla. Suositeltavaa on kytkeä +5 V punaiseen ja 0 V (eli maa, GND) mustaan riviin, niin välttyy virheiltä laitteiden virransyötössä. Koekytkentälevyn reikien välit ovat standardikokoisia, joten komponentit sopivat pääsääntöisesti hyvin kytkentäalustalle. K.Blinnikka: Arduino tutuksi 6

7 Ohjelmointiympäristö Lataa Arduinon ohjelmointiympäristö osoitteesta Ohjelma on ilmainen ja voit valita nappulan Just download. Jos haluat tukea ohjelman kehittäjiä, niin voit valita summan ja nappulan Contribute & Download. Sivulta löytyy Windows-, Mac- ja Linux-versiot. Windows-versiota asennettaessa asennusohjelma antaa mahdollisuuden asentaa automaattisesti myös USB-ajurin. Ajuri kannattaa asentaa, koska ilman sitä tietokone ei tunnista Arduinokorttia. Ohjelman käyttö 1. Avaa Arduino-ohjelma koneelle 2. Kytke Arduino-kortti USB-johdolla koneelle 3. Tarkista Tools/Työkalut-valikosta Board/Kortti ( Arduino Uno) ja Serial Port/Portti (yleensä COM3 tai suurempi) 4. Ohjelma Sketch ladataan Arduinolle vasemman yläkulman nuolella merkitystä nappulasta Seikkaperäiset ohjeet ovat sivulla (ohjeet löytyvät myös editoriohjelman Apua-toiminnosta). Ohjelmoinnin tärkein apusivusto on Arduinon oma opas osoitteessa (linkki Learning Reference). Verify/Tarkista Ohjelma tarkistetaan, mutta ei ladata Arduinolle Upload/Lataa Ohjelma ladataan Arduinolle Avaa sarjaportin monitorointiikkunan K.Blinnikka: Arduino tutuksi 7
.")
8 Ensimmäinen ohjelma BLINK Ohjelma vilkuttaa kortilla jo valmiiksi olevaa digitaaliseen pinniin 13 kytkettyä lediä. Mitään kytkentöjä ei koekytkentälevylle tarvitse tehdä. 1. Avaa Arduino-ohjelma tietokoneelle. Ohjelmointiympäristö aukeaa. 2. Avaa editoriohjelmaan tiedosto File/Tiedosto Examples/Esimerkit Basics Blink. Vaihtoehtoisesti voit kirjoittaa ohjelman editori-ikkunaan (koodi on seuraavalla sivulla). Lataa ohjelma Arduinolle 3. Kytke Arduinokortti USB-johdolla tietokoneeseen. Tarkista, että tietokone tunnistaa Arduinon: Valikossa Työkalut Kortti Arduino/Genuino Uno, Työkalut Portti (jokin COMportti valittuna, yleensä COM3 tai suurempi). Lataa ohjelma Arduinolle työkalupalkin nuolinappulasta. Arduino saattaa samalla kysyä talletatko tiedoston. Tiedostoa ei ole pakkoa tallettaa, joten voit painaa nappulaa Peruuta. Ladattu ohjelma vilkuttaa pinniin 13 kytkettyä lediä. BLINK-ohjelma on myöhemminkin käyttökelpoinen erityisesti silloin, kun täytyy nopeasti kokeilla, toimiiko yhteys Arduinolevylle oikein ja onko levy kunnossa vai viallinen. BLINK-ohjelma vilkuttaa lediä pinnissä 13 K.Blinnikka: Arduino tutuksi 8
9 /* Blink Sytyttää ja sammuttaa lediä sekunnin välein */ // Pinniin 13 on kytketty ledi Arduinolevyllä // SETUP ajetaan, kun ohjelma käynnistetään void setup() { // asetetaan pinni 13 OUTPUT-navaksi. pinmode(13, OUTPUT); // silmukkaa LOOP pyöritetään, kunnes levyltä katkaistaan virta: void loop() { digitalwrite(13, HIGH); // ledi päälle (HIGH 5 voltin jännite) delay(1000); // odotetaan sekunti Hyvään ohjelmointitapaan kuuluu kirjoittaa ohjelmatekstin joukkoon selventäviä kommentteja. Ohjelman kommentit on erotettu joko /* */ tai // merkeillä. Kommenteissa kerrotaan ko. lauseen, käskyn tai ohjelman osan toiminta tai merkitys. Kun ohjelmaa ladataan Arduinolle, kone ohittaa kommentit. Kommentit ovat ohjelmoijaa varten tehtyjä muistiinpanoja. Varsinaiset ohjelman käskyt on merkitty oheiseen esimerkkiin lihavoidulla tekstillä. digitalwrite(13, LOW); // ledi pois päältä (LOW 0 voltin jännite) delay(1000); // odotetaan sekunti Arduino-ohjelmassa on kaksi osaa: setup-lohko ja loop-lohko. Setup-lohkossa asetetaan ohjelman kertaluontoiset asetukset ja tämä ohjelman osa ajetaan yhden kerran ohjelman käynnistyessä. Loop-lohko on varsinainen ohjelmasilmukka. Silmukkaa pyöritetään niin kauan, kuin levyllä on virta päällä. Tutki koodia ja kokeile 1. Tutki ohjelmakoodia. Yritä päätellä, mitä kukin ohjelman käsky tarkoittaa. Ohjelmassa oleva delay-käsky keskeyttää ohjelman etenemisen 1 sekunnin ajaksi (1000 ms). Ledi vilkkuu siis sekunnin tahdissa. 2. Muuta delay-käskyssä olevaa aikaa pidemmäksi tai lyhyemmäksi. Kuinka lyhyen välähdyksen pystyt vielä havaitsemaan? Kun teet ohjelmakoodiin muutoksia, paina työkalupalkissa olevaa latausnappulaa. Muutettu ohjelma siirtyy Arduinokortille. Pelkkä tekstin muuttaminen ei vielä riitä! K.Blinnikka: Arduino tutuksi 9
 hyppylankoja johdotusta varten (4 kpl) Kytkennän kokoaminen 1.")
10 LEDin vilkuttelu, liikennevalot Tarvittavat välineet: koekytkentälevy ja Arduino/Genuino Uno 3 lediä (punainen, keltainen ja vihreä) 3 kpl 220 ohmin vastuksia (värikoodi punainen-punainen-ruskea tai punainen-punainen-mustamusta. Huom.: vastusten värikoodimerkinnöistä on lukukappale kirjasen loppuosassa) hyppylankoja johdotusta varten (4 kpl) Kytkennän kokoaminen 1. Aseta Arduinokortti ja koekytkentälevy kuvan mukaisesti. 2. Paina punainen, keltainen ja vihreä ledi koekytkentälevylle. Ledissä on kaksi johtoa. Pidempi johto asetetaan alapuolelle. Lyhyt johto Pitkä johto PUN KEL VIH 3. Laita kolme 220 ohmin vastusta kuvan mukaisesti koekytkentälevylle. 220 ohmin vastuksen ympärillä on värirenkaat punainen-punainen-ruskea (tai punainen-punainen-mustamusta). Vastukset voit asettaa kummin päin hyvänsä, suunnalla ei ole väliä. Kummankin vastuksen toinen johdin tulee asettaa aivan levyn reunalla olevaan reikäriviin (pystysuuntainen rivi). Ledin puoleinen johto tulee kiinnittää samalle riville ledin ylemmän johdon kanssa (vaakasuuntainen rivi). K.Blinnikka: Arduino tutuksi 10

, Arduinon pinnistä 9 vihreän ledin alempaan kytkentäjohtoon (samalle reikäriville), Arduinon pinnistä GND")
11 PUN KEL VIH 4. Yhdistä Arduinokortti kytkentälevyyn kolmella hyppylangalla. Lankojen värillä ei ole väliä. Tärkeintä on, että itse erotat eri johtimet. Arduinon pinnit on numeroitu piirilevyn reunaan. Kytke hyppylanka Arduinon pinnistä 13 punaisen ledin alempaan kytkentäjohtoon (samalle reikäriville), Arduinon pinnistä 11 keltaisen ledin alempaan kytkentäjohtoon (samalle reikäriville), Arduinon pinnistä 9 vihreän ledin alempaan kytkentäjohtoon (samalle reikäriville), Arduinon pinnistä GND (Ground) koekytkentälevyn reunan reikäriviin. PUN KEL VIH Kytkentä on valmis! K.Blinnikka: Arduino tutuksi 11
 { pinmode(13, OUTPUT); void loop() { digitalwrite(13, HIGH); delay(1000); digitalwrite(13, LOW); delay(1000); K.")
12 Kokeillaan BLINK-ohjelmaa: Etsi valikosta Tiedosto/File Esimerkit/Examples Basics Blink. Saat valmiin koodin muokattavaksi. void setup() { pinmode(13, OUTPUT); void loop() { digitalwrite(13, HIGH); delay(1000); digitalwrite(13, LOW); delay(1000); K.Blinnikka: Arduino tutuksi 12
13 Ohjelman täydentäminen kaikki ledit vilkkumaan Lisää ohjelmaan seuraavat rivit void setup() { pinmode(9, OUTPUT); // Asetetaan pinnit 9, 11 ja 13 OUTPUT-pinneiksi pinmode(11, OUTPUT); pinmode(13, OUTPUT); void loop() { digitalwrite(13, HIGH); // vilkutetaan pinnin 13 lediä delay(1000); digitalwrite(13, LOW); digitalwrite(11, HIGH); // vilkutetaan pinnin 11 lediä delay(1000); digitalwrite(11, LOW); digitalwrite(9, HIGH); // vilkutetaan pinnin 9 lediä delay(1000); digitalwrite(9, LOW); Lataa ohjelma Arduinolle. Ohjelma vilkuttaa ledejä, mutta toiminta ei ole vielä aivan samanlaista kuin oikeissa liikennevaloissa. Lisätutkimuksia 1. Muuta ohjelmaa niin, että saat liikennevalot toimimaan oikein : punainen palaa pitkään, punaisen vaihtuessa vihreäksi punainen ja keltainen ledi palavat hetken yhtä aikaa, vihreä palaa pitkään, vihreän vaihtuessa punaiseksi keltainen valo palaa hetken aikaa. Mieti, miten saat nämä toiminnot ohjelmaan? 2. Tutki ohjelmakoodia ja päättele, mitä ohjelman käskyt digitalwrite delay tekevät. Miten koodiin on merkitty käskyn kohde ja vaikutus. Mitä merkitystä mahtaa olla ohjelmassa alussa olevilla pinmode-käskyllä? Miksi arvelet ohjelmassa olevan kaksi lohkoa, setup ja loop? K.Blinnikka: Arduino tutuksi 13
14 3. A. Tee ohjelma, joka vilkuttaa kaikkia ledejä yhtä aikaa samassa tahdissa. Lataa ohjelma Arduinolle ja testaa toiminta. B. Muokkaa ohjelmaa niin, että ledit syttyvät vuorotellen ja saat ledistä toiseen liukuvan valon. C. Tee kytkennästä metronomi. Yksi ledi (väri) vilkkuu kolme kertaa (yks-kaks-kol-) ja neljännellä iskulla (-nel) kaikki ledit loistavat Tärkeät funktiot pinmode(pinni, toiminta); Asettaa käskyssä määritetyn pinnin joko OUTPUT-pinniksi tai INPUT-pinniksi. pinni: jokin Arduinon pinninumero toiminta: INPUT tai OUTPUT digitalwrite(pinni, arvo); Kirjoittaa arvon HIGH tai LOW digitaaliseen pinniin pinni: jokin Arduinon pinninumero arvo: HIGH vastaa 5 voltin jännitettä digitaalisessa pinnissä (looginen 1), LOW vastaa nollan voltin jännitettä digitaalisessa pinnissä (looginen 0). Parametri HIGH sytyttää ja LOW sammuttaa ledit eli asettaa pinnin jännitteeksi joko +5 V tai 0 V. Parametri tarkoittaa käskylle annettavia alkuarvoja, joiden mukaan toiminto suoritetaan. delay(aika); Keskeyttää ohjelman annetuksi ajaksi. aika: aika annetaan millisekunteina (1000 ms = 1 s) Tehtäviä 1. Miksi ohjelmakoodia on hyvä kommentoida? 2. Mitä merkitystä on ohjelman setup-lohkolla? 3. Mihin lohkoon varsinainen ohjelma sijoitetaan? 4. Millä merkillä ohjelmarivit erotetaan toisistaan, entä ohjelman lohkot? K.Blinnikka: Arduino tutuksi 14
15 Ledin kytkentä Arduinoon Diodi on puolijohdekomponentti, joka päästää sähkövirtaa vain toiseen suuntaan, ns. päästösuuntaan. Kun diodi käännetään toisinpäin, estosuuntaan, sen läpi ei pääse sähkövirtaa. LED (Light Emitting Diode) on diodi, joka lähettää valoa kytkettäessä se päästösuuntaan. Päästösuunnassa olevan diodin resistanssi on pieni, jolloin komponentin läpi saattaa kulkea pienelläkin jännitteellä suuri sähkövirta, joka voi vioittaa lediä. Ledin kanssa sarjaan tulee kytkeä sarjavastus, joka rajoittaa ledin läpi kulkevan sähkövirran noin milliampeeriin. Hehkuvan ledin napojen välillä vaikuttaa ns. kynnysjännite, noin 1,5 V. Arduinon digitaalisessa pinnissä on 5 voltin jännite. Vastuksen napojen välinen jännite on siis (5-1,5) V = 3,5 V. Kun jännite ja sähkövirta tiedetään, voidaan vastuksen resistanssin arvo laskea: R = U/I = 3,5 V / 0,02A = 175 Lähin vastuksen kaupasta saatava standardiarvo on 220 ohmia, jota voidaan käyttää kytkennöissä ledin sarjavastuksena. Vastusten arvot ohmia käyvät hyvin ledin sarjavastukseksi. Kirjasen kytkennöissä ledin sarjavastus on kytketty virtapiirissä säännöllisesti ledin maan puolelle. Aivan yhtä hyvin vastuksen voi sijoittaa toiselle puolelle. Järjestyksellä ei ole sähköisen toimivuuden kannalta väliä. K.Blinnikka: Arduino tutuksi 15
 hyppylankoja johdotusta varten (4 kpl) RGB-ledi sisältää samassa kotelossa punaisen, vihreän ja sinisen ledin.")
16 RGB-ledi Tarvittavat välineet: koekytkentälevy ja Arduino/Genuino Uno RGB-ledi tai 3 lediä (punainen, keltainen ja vihreä) 3 kpl 220 ohmin vastuksia (punainen-punainen-ruskea tai punainen-punainen-musta-musta) hyppylankoja johdotusta varten (4 kpl) RGB-ledi sisältää samassa kotelossa punaisen, vihreän ja sinisen ledin. Mikäli käytössä ei ole RGB-lediä voit käyttää tavallisia yksivärisiä ledejä samaan tapaan kuin liikennevalotutkimuksessa. RGB-ledin ledeillä on yhteinen katodi. Anodiliitäntäjohtimia on kolme kullakin eri värisellä ledillä. Johdinjärjestys on kuvan mukainen, pisin johto on katodi. Kutakin lediä voi ohjata kytkemällä Arduinon digitaalinen OUTPUT-napa 220 ohmin vastuksen kautta ledin anodille. Kytkentä Kytke RGB-ledi ja 220 ohmin vastukset koekytkentälevylle. Kuvaan on piirretty kullekin ledille oma hyppylanka ja vastus. Voit myös liittää vastukset suoraan Arduinon pinneille, hyppylangat ovat tällöin tarpeettomia. Yhdistä RGB-ledin punainen ledi Arduinon pinniin 3, vihreä pinniin 5 ja sininen pinniin 7. Ledin katodi kannattaa yhdistää koekytkentälevyn reunan liitäntärivin kautta Arduinon maahan (GND). Ohjelma Ohjelma on samankaltainen kuin aiemmassa liikennevalo-ohjelmassa. Erona on, että lisätään ledipinnien määrittelyt globaaleina muuttujina. Tämä helpottaa koodin luettavuutta, koska pinnille annetaan toimintaa kuvaava nimi pelkän numeron sijaan. K.Blinnikka: Arduino tutuksi 16
17 Kokeile ledien sytyttämistä yksi ledi kerrallaan. // Määritetään globaalit muuttujat, jotka näkyvä koko ohjelmalle (pinnit, joihin // RGB-ledin eri värit on kytketty) int ledpun = 3; // muuttujan ledpun arvoksi annetaan 3 int ledsin = 5; // muuttujan ledsin arvoksi annetaan 5 int ledvih = 7; // muuttujan ledvih arvoksi annetaan 7 void setup() { pinmode(ledpun, OUTPUT); // asetetaan pinnit OUTPUT-tilaan pinmode(ledvih, OUTPUT); pinmode(ledsin, OUTPUT); void loop() { digitalwrite(ledpun, HIGH); // Tässä vilkutetaan vain yhtä lediä delay(1000); digitalwrite(ledpun, LOW); delay(1000); Määritetään aluksi ledipinnit globaaleina muuttujina. Globaalit muuttujat sijoitetaan aivan ohjelman alkuun ennen setup-lohkoa. Globaali muuttuja näkyy ohjelman kaikille osille ja siihen voi viitata kaikkialta ohjelmassa. Tämän määrittelyn ansiosta ledipinnien muuttaminen käy helposti. Pinnien numerointia ei tarvitse muuttaa monessa kohtaa, vaan riittää, kun tekee muutoksen vain ko. globaalille muuttujalle. Lisäksi muuttujan nimi kertoo havainnollisesti muuttujan kohteen. Koodia on helpompi lukea. int ledpun = 3; int ledsin = 5; int ledvih = 7; Vastaavat muutokset täytyy tehdä myös ohjelman runkoon setup-lohkoon: pinmode(ledpun, OUTPUT); pinmode(ledsin, OUTPUT); pinmode(ledvih, OUTPUT); Varsinaiseen ohjelmasilmukkaan, loop-lohkoon, sijoitetaan ohjelmakäskyt, jotka sytyttävät ledit: digitalwrite(ledpun, HIGH); digitalwrite(ledsin, HIGH); digitalwrite(ledvih, HIGH); Ledit saadaan sammutettua käskyillä digitalwrite(ledpun, LOW); digitalwrite(ledsin, LOW); digitalwrite(ledvih, LOW); K.Blinnikka: Arduino tutuksi 17
18 Delay-lauseella saat valot loistamaan tietyn aikaa, esim. delay(1000); keskeyttää ohjelman yhden sekunnin ajaksi. Muokkaa ohjelmaa Kokeile ohjelmoida samat toiminnot kuin aiemmin. A. Muokkaa ohjelmaa niin, että ledit syttyvät vuorotellen ja saat väristä toiseen vaihtuvan valon. Lataa ohjelma Arduinolle ja testaa toiminta. B. Tee ohjelma, joka vilkuttaa kaikkia ledejä yhtä aikaa samassa tahdissa. Minkä väriseltä RGB-ledi näyttää? Erotatko erilliset ledit? C. Tee kytkennästä metronomi. Yksi ledi (väri) vilkkuu kolme kertaa (yks-kaks-kol-) ja neljännellä iskulla (-nel) kaikki ledit loistavat Tehtäviä 1. Piirrä kytkennän piirikaavio. Ota mallia piirikaaviosta, jossa on yhden ledin kytkentä. RGB-ledissä on kolme erillistä lediä. 2. Mitä pinmode-lause tekee? Mitkä parametrit täytyy ko. käskylle antaa? 3. Miten saat digitalwrite-käskyn osoittamaan tiettyä pinniä? Mitä tarkoittaa digitalwrite-käskyssä LOW ja HIGH? 4. Haluat pysäyttää ohjelman toiminnan 2,7 sekunnin ajaksi. Kirjoita sopiva delay-lause 5. Mitä tarkoittaa globaali muuttuja? K.Blinnikka: Arduino tutuksi 18
19 Ohjelman rakenteita, FOR-silmukka Ohjelman toistuvia toimintoja voi toteuttaa esimerkiksi FOR-silmukan avulla. Käytä esimerkissä RGB-ledin kytkentää. Ledit on kytketty pinneihin 5, 7 ja 9. FOR-Silmukan rakenne for (int i=0; i <= 255; i++) { // muuttuja i on silmukan laskuri. Muuttuja tulee tarvittaessa määritellä (jos sitä ei ole jo aiemmin // määritelty). Muuttujan voi nimetä vapaasti (ei tarvitse olla i) // Silmukkaa toteutetaan niin kauan kun laskurille asetettu ehto toteutuu. // Silmukan kierroksen jälkeen laskurin arvoa muutetaan // Merkintä i++ tarkoittaa sijoitusta i = i + 1. Siis laskurin arvoa kasvatetaan yhdellä // ohjelmakäskyt aaltosulkeiden sisään 1. // FOR-silmukka // Vilkutetaan pinniin 5 kytkettyä lediä niin, että // ledin palamisaika kasvaa jokaisella for-silmukan kierroksella int led = 5; // määritetään globaali muuttuja ja annetaan niille arvot; void setup() { pinmode(led, OUTPUT); // asetetaan OUTPUT-pinnit void loop() { for (int i=1; i <= 10; i++){ // FOR-silmukka, muuttujan i alkuarvo on 1, kasvatetaan digitalwrite(led, HIGH); // i:n arvoa yhdellä jokaisella kierroksella kunnes i saa arvon 10 delay(200*i); // Vilkun pituutta kasvatetaan 0,2 s - - > 2 s digitalwrite(led, LOW); // Vilkutetaan punaista lediä (vrt. BLINK-ohjelma). delay(500); K.Blinnikka: Arduino tutuksi 19
20 2. Seuraavassa esimerkissä sijoitetaan taulukkoon arvoja. Taulukon arvoja voidaan hakea koodiin taulukon alkioon viittaamalla. Huomaa, että ohjelman SETUP-lohkoon voi myös kirjoittaa normaalia ohjelmakoodia (ei siis pelkästään määrittelyjä). Varsinaisessa ohjelmaluupissa on käytetty kahta sisäkkäistä FOR-silmukkaa. // FOR-silmukka int Ledit[5, 7, 9]; // määritetään taulukko Ledit, jonka alkioiksi sijoitetaan luvut 5, 7 ja 9 // Luvut kuvaavat pinnejä, joihin on kytketty ledi. // Koodissa tiettyyn pinniin voidaan viitata kirjoittamalla esimerkiksi Ledit[3] void setup() { for (int pinni = 1; pinni <=3; pinni++) { pinmode(ledit[pinni], OUTPUT); // asetetaan OUTPUT-pinnit, jotka haetaan taulukosta Ledit void loop() { for (int laskuri=1; laskuri <= 3; laskuri++) { // sisäkkäisiä FOR-silmukoita for (int i=1; i <= 10; i++){ // FOR-silmukka, muuttujan i alkuarvo on 1, kasvatetaan digitalwrite(ledit[laskuri], HIGH); // i:n arvoa yhdellä jokaisella kierroksella delay(500); // kunnes i saa arvon 10. digitalwrite(ledit[laskuri], LOW); // Vilkutetaan lediä (vrt. BLINK-ohjelma). delay(500); K.Blinnikka: Arduino tutuksi 20
 2 kpl LED 1. Starter Kitin painonapissa on neljä liitäntäpinniä.")
21 Painonapin lukeminen Välineet Arduino Uno, koekytkentäalusta ja hyppylankoja 2 kpl painonappikytkimiä 2 kpl vastuksia 220 (punainen-punainen-ruskea tai punainen-punainen-musta-musta) 2 kpl vastuksia 10 k, (ruskea-musta-oranssi tai ruskea-musta-musta-punainen) 2 kpl LED 1. Starter Kitin painonapissa on neljä liitäntäpinniä. Kaksi pinniä on kytketty yhteen ja kytkintoiminnon kytkentä on oikeanpuoleisessa kuvassa. Kytkimen yhteydessä käytetään 10 k vastusta, joka varmistaa, että jännitetaso on varmasti 0 V tai 5 V (looginen 0 tai 1). Kun painonappia ei paineta, digitaalisen pinnin jännite on 0 volttia. Kun painonappia painetaan, digitaalisen pinnin jännite on +5 volttia. 10 kilo-ohmin vastuksen värikoodi on ruskea-musta-oranssi (tai ruskea-musta-musta-punainen). K.Blinnikka: Arduino tutuksi 21
22 // Painonapin lukeminen // Levyllä oleva pinnin 13 ledi palaa, // kun painonappia painetaan // määritetään muuttujat const int nappipin = 2; const int ledpin = 13; int napintila = 0; // painonappipinni // Ledin pinni // painonapin tila void setup() { pinmode(ledpin, OUTPUT); // OUTPUT ledille pinmode(nappipin, INPUT); // INPUT //painonapille void loop(){ napintila = digitalread(nappipin); // luetaan painonappi if (napintila == HIGH) { // jos painetaan, niin napintila on HIGH: digitalwrite(ledpin, HIGH); // sytytetään ledi else { digitalwrite(ledpin, LOW); // muutoin sammutetaan ledi 2. Edellisessä tutkimuksessa käytettiin Arduinolevyllä valmiiksi olevaa lediä. A. Kokeile nyt kytkeä erillinen ledi. Lisää johonkin digitaaliseen OUTPUT pinniin ledi ja 220 ohmin vastus. Ledin lyhempi johdin (katodi) kytketään sarjavastuksen kautta maahan ja pidempi johdin hyppylangan avulla valittuun pinniin. Kokeile toimintaa niin, että saat ledin palamaan painonapin avulla. Tee ohjelmaan tarvittavat muutokset. B. Kokeile myös muuttaa ohjelmaa, että saat kytkennällä erilaisia valoefektejä. Esimerkiksi niin, että ledi palaa jatkuvasti, kun nappia ei paineta ja vilkkuu, kun nappia painetaan. 3. Lisää toinen ledi ja muuta ohjelmaa niin, että ensimmäinen ledi palaa kun painonappia painetaan ja toinen ledi silloin, kun nappulaa ei paineta. K.Blinnikka: Arduino tutuksi 22
23 Painonapin ohjelmassa käytetään tärkeää ohjausrakennetta: if else Mikäli if-sanan jälkeen kirjoitettu ehto on tosi, niin toiminto A toteutetaan. Muussa tapauksessa toteutetaan toiminto B. Vertailuoperaattorina käytetään merkkiä == (yhtäsuuruus). if (muuttuja == 500) { // toiminto A else { // toiminto B K.Blinnikka: Arduino tutuksi 23
24 Muuttujat Ohjelmassa käsiteltävät tiedot talletetaan muuttujiin. Muuttujat täytyy ohjelman alussa määritellä, jotta kone pystyy varaamaan niille muistitilaa. Määrittely kertoo, minkä tyyppistä tietoa muuttujaan talletetaan. Tärkeitä tyyppimääritteitä ovat int ja float. int on kokonaislukumuuttuja (int = integer = kokonaisluku), float on desimaalilukumuuttuja (float = floating number = liukuluku). Muuttujan määrittelyn yhteydessä muuttujan voi alustaa, eli sille voi antaa alkuarvon. Avainsana const tarkoittaa, että muuttuja on vakio eli sen arvo ei muutu ohjelmassa (const = constant = vakio). Tärkeät funktiot int digitalread(pinni); Lukee digitaalisen pinnin arvon, joko HIGH (looginen 1, +5 V) tai LOW (looginen 0, 0 V). Funktio palauttaa ohjelmassa määritettyyn muuttujaan joko arvon 1 (HIGH) tai 0 (LOW). pinni: jokin Arduinon pinninumero Muuttuja, vakio, funktio? Ohjelmoinnin yhteydessä käytetään paljon matematiikan käsitteitä. Ohjelmoinnissa ja matematiikassa on tärkeä esittää asiat tarkasti ja loogisesti. Hyöty on molemminpuolinen: matematiikan tietoja voit suoraan soveltaa ohjelmoimiseen, toisaalta ohjelmoiminen elävöittää matemaattisia käsitteitä. Ohjelmoinnissa funktio (engl. function) on tietyn toiminnon suorittamiseen tarkoitettu käsky tai käskysarja, joka usein palauttaa jonkin arvon. Esimerkiksi digitalread-funktio palauttaa joko arvon HIGH (1) tai LOW (0). Funktion määrittelyssä oleva int kertoo, että funktio palauttaa kokonaisluvun (tässä tapauksessa 1 tai 0). Mikäli määrittelyssä funktion nimen edessä on void, niin funktio ei palauta mitään arvoa (esimerkiksi käsky digitalwrite). Muuttujat (engl. variable) ovat koneen työmuistiin varattuja tietoalueita, joihin voi tallettaa tietoa. Muuttujaan talletettua tietoa voi muokata ja hakea ohjelman avulla. Kun muuttuja ensimmäisen kerran esitellään, koneelle täytyy kertoa muuttujaan talletettavan tiedon tyyppi. Esimerkiksi muuttujatyyppi int (kokonaisluku) varaa talletustilaa kaksi tavua. Yhdessä tavussa on kahdeksan bittiä (yksi bitti on ykkönen tai nolla). Float eli desimaaliluku vie tilaa neljä tavua. Vakio (engl. constant) on arvoltaan muuttumaton luku. Lisäämällä avainsana const muuttujan määrittelyn eteen, muuttuja talletetaan niin, että sen pystyy ainoastaan lukemaan ( read-only ). K.Blinnikka: Arduino tutuksi 24
25 Tehtäviä 1. Mitä tarkoittavat ohjelmoinnissa termit a) funktio, b) muuttuja, c) vakio? 2. Miten voi ohjelmassa määritellä muuttujan? Miten saat muuttujan alustettua? Anna esimerkki. 3. Mitä tarkoittaa funktio palauttaa arvon? 4. Millaisia arvoja funktio digitalread palauttaa? 5. Etsi Arduinon omasta dokumentaatiosta tieto, millaisen lukualueen lukuja int-muuttujaan voi tallettaa. 6. Etsi Arduinon dokumentaatiosta, miten if else-rakenteen vertailuehto voidaan muotoilla. K.Blinnikka: Arduino tutuksi 25

26 Jännitteen mittaaminen analoginen input Välineet Arduino Uno, koekytkentäalusta ja hyppylankoja 3 kpl 1,5 V paristoja Ledi, 220 vastus AD-muunnin tarkoittaa muunninta, joka muuttaa analogisen, mitä tahansa arvoja saavan jännitteen täsmälliseksi digitaaliseksi luvuksi. Arduinolevy sisältää AD-muuntimen, joka lukee Analog input-navalle kytketyn pariston tai muun komponentin jännitteen (0 5 V) ja muuttaa sen kokonaisluvuksi Arduinon AD-muuntimen mittaustarkkuus on siis 5,0 V / 1024 = 4,9 mv. 5 voltin jännitteellä AD-muunnin antaa luvun 1023, 0 voltin jännite antaa luvun 0. Välissä olevat arvot voi laskea, esimerkiksi jännitettä 1,0 V vastaa kokonaisluku (1 V/5 V)*1023 = Kirjoita oheinen koodi ja lataa se Arduinoon. // Jännitteen lukeminen analogisesta pinnistä void setup() { Serial.begin(9600); // asetetaan sarjaportin nopeudeksi 9600 bittiä sekunnissa void loop() { // luetaan analogisen pinnin A0 jännite int lukema = analogread(a0); // tulostetaan lukema sarjaporttiin Serial.println(lukema); delay(1000); // viive arvojen lukemiseen sekunnin välein Kytke 1,5 voltin pariston plusnapa Arduinon analogiseen pinniin A0. Kytke pariston miinusnapa GND-pinniin. Samalla tavalla voit tutkia kahta ja kolmea sarjaan kytkettyä paristoa. Paristot voit kytkeä sarjaan yksinkertaisesti niin, että asetat paristot peräkkäin. Apuna voit käyttää avonaista paristokoteloa, mikäli sellainen on käytettävissä. K.Blinnikka: Arduino tutuksi 26
.")
27 Paina editoriohjelman sarjamonitorinappulasta monitorointi-ikkuna auki. Tarkista, että monitori-ikkunan oikeassa alakulmassa ilmaistu tiedonsiirtonopeus on sama kuin ohjelmaan määritelty (9600 bit/s). Sarjamonitori-ikkunan avaaminen Kokeile, mitä lukemia saat yhdellä paristolla (nimellisjännite 1,5 V). Kokeile myös kahdella ja kolmella sarjaan kytketyllä paristolla (nimellisjännitteet 3,0 V ja 4,5 V). Älä kytke neljää paristoa sarjaan, sillä analoginen input on tarkoitettu alle 5 voltin jännitteille. Kirjaa lukemat kustakin tapauksesta muistiin. Kytke pinniin A0 kytketty hyppylanka suoraan Arduinon omiin jännitepinneihin GND, 3.3 V ja 5 V. Merkitse näistäkin mittauksista lukemat muistiin. Laske mittausarvojen perusteella paristokytkentöjen jännitteet. Käytä kaavaa jännite = lukema V Kokoa mittaustulokset taulukkoon. Mittaa jännitteet myös digitaalisella yleismittarilla. Paristo/pinni AD muuntimen lukema Lukemasta laskettu jännite (V) 1 paristo Yleismittarilla mitattu jännite (V) 2 paristoa 3 paristoa 5 V pinni 3,3 V pinni GND pinni K.Blinnikka: Arduino tutuksi 27
28 Vastaavatko jännitearvot oletettuja paristojen jännitteitä (nimellisjännitteet 1,5 V, 3,0 V, 4,5 V)? Entä Arduinolevyn omia jännitteitä? Tuoreen 1,5 voltin pariston jännite voi olla luokkaa 1,6 volttia, pitkään käytetyn puolestaan reilusti alle nimellisjännitteen. Kokeile myös, että pidät pelkkää johdinta analogisessa pinnissä. Vie kätesi johtimen lähelle ja kosketa sitä. Seuraa monitori-ikkunan lukemia. Huomaat, että analoginen input-napa on hyvin herkkä häiriöille. Lukema saattaa vaeltaa paljonkin. 2. Muokkaa edellistä ohjelmaa, niin saat jännitemittarin. Tulokset saat suoraan voltteina. Kirjoita oheinen koodi ja lataa se Arduinoon. // Jännitemittari. Jännitteen lukeminen analogisesta pinnistä ja tulostus voltteina void setup() { Serial.begin(9600); // asetetaan sarjaportin nopeudeksi 9600 bittiä sekunnissa void loop() { // luetaan analogisen pinnin A0 jännite int lukema = analogread(a0); // muutetaan lukema volteiksi ja vaihdetaan samalla tietotyyppiä float jannite = (lukema/1023.0)*5.0; // tulostetaan lukema sarjaporttiin Serial.print( Jännite volteissa: ); // tulostetaan selosteteksti Serial.println(jannite); // tulostetaan jännitteen arvo delay(1000); // viive arvojen lukemiseen Kokeile piirin ja ohjelman toimintaa yhdellä, kahdella tai kolmella sarjaan kytketyllä paristolla. Ovatko tulokset odotettuja? 3. Tee paristotesteri. Lisää koekytkentälevylle punainen ja vihreä ledi ja 220 ohmin vastukset. Kytke ledit kahteen digitaaliseen output-pinniin. Katso tarvittaessa mallia ledin vilkutustöistä. Piirrä vihkoon kytkennän piirikaavio. Muokkaa edellisen kohdan ohjelmaa niin, että saat jännitehälyttimen: ledi syttyy kun jännite alittaa ennalta ohjelmaan asetetun arvon. Käytetyn 1,5 voltin pariston jännite voi olla alle 1,4 volttia. Tuoreen pariston jännite on 1,5-1,6 V. K.Blinnikka: Arduino tutuksi 28
29 Ohjelmassa voit käyttää if else ohjausrakennetta tyyliin if (lukema < 500) { // ledi 1 sytytetään // ledi 2 sammutetaan else { // ledi 2 sytytetään // ledi 1 sammutetaan Lediä varten ohjelmaan täytyy lisätä myös pinmode- ja digitalwrite-käskyt oikeisiin kohtiin. Kokeile! Tutki, mikä olisi sopiva arvo vertailulukemaksi. Käytä apuna sarjaportin monitoria ja edellisessä tehtävässä mitattuja jännitteen ja AD-muuntimen lukemia. Kun ohjelma on valmis, voit kommentoida pois sarjaporttiin liittyvät ohjelmarivit (lisää //-merkit ohjelmarivin eteen, jolloin rivien yli hypätään ohjelmaa käännettäessä). Voit lisätä kytkentään myös keltaisen ledin. Ohjelmoi toiminta niin, että vihreä ledi palaa, jos pariston jännite on yli 1,5 V, keltainen ledi palaa pariston jännitteellä 1,4-1,5 V ja punainen ledi palaa jännitteellä alle 1,4 volttia. Katso tässä tapauksessa ohjeistusta if-else-rakenteelle Arduinon omasta dokumentaatiosta. Voit testata ohjelman ja piirin toimintaa säädettävällä jännitelähteellä. Muista, että Arduino on suunniteltu maksimissaan 5 voltin jännitteelle. Älä käytä suurempaa jännitettä, Arduinolevy voi rikkoutua! Tärkeät funktiot int analoglread(pinni); Lukee analogisen pinnin jännitteen (0 5 V) ja muuttaa jännitelukeman kokonaisluvuksi välillä Funktio palauttaa ohjelmassa määritettyyn muuttujaan ko. kokonaisluvun. pinni: jokin Arduinon pinninumero Serial.begin Asettaa tiedonsiirtonopeuden, esim. Serial.begin(9600); asettaa nopeuden arvoon 9600 bit/s. Serial.println(lukema) Tulostaa tekstiä sarjaporttiin niin, että rivi päättyy rivinvaihtoon. Rivi on luettavissa sarjaportin monitoriikkunasta. Serial.println(lukema); tulostaa muuttujan lukema arvon. Mikäli haluat tulostaa tekstiä, laita teksti lainausmerkkien sisään, esimerkiksi Serial.println( jännite on: );. Tehtäviä 1. Laadi taulukko ja merkitse siihen Arduinon AD-muuntimen jännitteitä 0 V, 1 V, 2 V, 2,5 V, 3 V, 4 V ja 5 V vastaavat kokonaisluvut. 2. Piirrä piirikaaviot eri kytkennöistä. 3. Kerro omin sanoin, miten jännitteen laskukaava saadaan. K.Blinnikka: Arduino tutuksi 29


30 Jännitteenjakaja potentiometrin lukeman lukeminen Potentiometriksi on nimetty säädettävä vastus, jossa on kolme liitäntänastaa kuvan mukaisesti. Potentiometrissä on esimerkiksi hiilestä valmistettu hevosenkengän muotoinen vastusliuska, jonka päihin on kiinnitetty liitäntänastat. Keskellä on akseliin liitetty liukukosketin, jota voidaan liikuttaa portaattomasti vastusliuskan päällä Potentiometrin rakenne on kuvattu myös piirrosmerkissä. Nuoli kuvaa liukukosketinta. 10 kilo-ohmin potentiometrissä on napojen 1 ja 3 välinen resistanssi 10 k. Napojen 1-2 tai 2-3 välistä resistanssia voi säätää liukukoskettimella vapaasti välillä 0-10 k. Potentiometri voidaan kytkeä jännitteenjakajaksi. Yleensä potentiometrin toinen äärinasta on kytketty jännitelähteen toiseen napaan (esim. Arduinon +5 V) ja toinen nasta maahan (Arduinon GND-pinni eli 0 V). Tällöin keskimmäiseen nastaan voidaan säätää mikä tahansa jännite nollan ja viiden voltin välillä. Välineet Arduino Uno, koekytkentäalusta ja hyppylankoja 10 k potentiometri 220 vastus ledi 1. Tee kytkentä. K.Blinnikka: Arduino tutuksi 30
31 Kokeile ohjelmana edellisen työn (pariston jännitteen mittaus) ohjelmaa. Muokkaa ohjelmaa niin, että saat luettua mittaustuloksen sekä kokonaislukuna että volteissa. Koodi lukee potentiometrin keskimmäisen navan jännitteen ja tulostaa mittaustuloksen tietokoneelle monitori-ikkunaan 2. Lisää kytkentälevylle vastus ja ledi. Kytke ne johonkin digitaaliseen output-pinniin. Laadi ohjelma, joka vilkuttaa lediä. Vilkkumistaajuutta voi säätää potentiometrillä. Lisää kytkentään toinen ledi, joka vilkkuu vastakkaisessa tahdissa. // ledin vilkkumistaajuuden säätö potentiometrillä int ledi = 3; // ledi pinniin 3 void setup() { pinmode(ledi, OUTPUT); // asetetaan pinni 3 OUTPUT-pinniksi void loop() { int aika = analogread(a0); // luetaan analogisen pinnin A0 jännite digitalwrite(ledi, HIGH); // ledi syttyy delay(aika); // viive, aika on potentiometriltä luettu jännite digitalwrite(ledi, LOW); // ledi sammuu delay(aika); // viive, aika on potentiometriltä luettu jännite K.Blinnikka: Arduino tutuksi 31
 vaimentaa äänen pinnistä tone-käsky tuottaa kanttiaaltoa annetulla taajuudella digitaaliseen output-napaan. Kerrallaan voi antaa vain yhden äänen. 1.")
32 Äänen tuottaminen Voit tuottaa ääntä Arduinolla. tone(pinni, taajuus, (kesto)) tuottaa äänen output-pinniin, äänen kesto ilmoitetaan millisekunneissa. notone(pinni) vaimentaa äänen pinnistä tone-käsky tuottaa kanttiaaltoa annetulla taajuudella digitaaliseen output-napaan. Kerrallaan voi antaa vain yhden äänen. 1. Kytke pietsosähköinen kaiutin Arduinon pinneihin 11 ja GND. Kokeile koodia. Käskyä tone varten ei ole tarpeen asettaa pinniä OUTPUT-moodiin setup-lohkossa (eli ei tarvitse kirjoittaa pinmode-käskyä). Oheinen kytkentä ja ohjelma tuottaa C-duurisoinnun sävelet. Kokeile miltä ääni kuulostaa ilman delay-käskyjä. Mistä tämä mahtaa johtua? Voit yksinkertaisesti kommentoida delayrivit pois lisäämällä kaksi kauttamerkkiä (//) rivin eteen. Tällöin kääntäjä hyppää rivien yli ohjelmaa ladattaessa. void setup() { void loop() { tone(11, 262, 500); // tuotetaan 262 Hz ääni (C-sävel) delay(1000); // viive 1 sekunti tone(11, 330, 500); // tuotetaan 330 Hz ääni (E-sävel) delay(1000); // viive 1 sekunti tone(11, 392, 500); // tuotetaan 392 Hz ääni (G-sävel) delay(1000); // viive 1 sekunti 2. Soita jokin yksinkertainen sävelmä Arduinolla. Vinkki: C-duuriasteikon sävelten taajuudet: C 262 Hz, D 294 Hz, E 330 Hz, F 350 Hz, G 392 Hz, A 440 Hz, H 494 Hz; C 523 Hz. ( K.Blinnikka: Arduino tutuksi 32
33 3. Lisää kytkentään 10 kilo-ohmin vastus ja painonappi pinniin 2 (katso esimerkkikytkentä aiemmista harjoituksista). Oheisella ohjelmalla kytkentä tuottaa äänen, kun painonappia painetaan. // TONE äänen tuottaminen 2 // määritetään vakioita const int kaiutin = 11; // pinni, johon kaiutin kytketty const int nappi = 2; // pinni, johon painonappi ja vastus on kytketty int napintila = 0; // muuttuja, johon napin tila luetaan (on/off) void setup() { pinmode(nappi, INPUT); // asetetaan INPUT-pinni void loop() { // luetaan napin tila: napintila = digitalread(nappi); // mikäli nappia painetaan, // muuttujan tila on HIGH: if (napintila == HIGH) { // tuotetaan 300 Hz ääni tone(kaiutin, 300); else { //Mikäli nappia ei paineta, on sen tila LOW // vaiennetaan kaiutin notone(kaiutin); K.Blinnikka: Arduino tutuksi 33

34 4. Tee oheinen kytkentä koekytkentäalustalle. Painonappien kohdalla olevien vastusten arvot ovat 10 k ja ledin kohdalla olevan 220. Piirrä laitteen piirikaavio vihkoosi. Tutki alla olevaa koodia. Mitä se tekee? Tehtävä 1: Kirjoita ja syötä koodi Arduinolle. // TONE äänen tuottaminen 2 // määritetään vakioita const int nappi1 = 1; // nappi 1 const int nappi2 = 2; // nappi 2 const int kaiutin = 11; // kaiutin const int ledi = 10; // ledi // määritetään muuttujat kummallekin napille // ja sijoitetaan alkuarvot (0 = LOW) int napintila1 = 0; int napintila2 = 0; // muuttuja napin 1 tilalle // muuttuja napin 2 tilalle void setup() { // Asetetaan output-pinnit K.Blinnikka: Arduino tutuksi 34
35 pinmode(kaiutin, OUTPUT); pinmode(ledi, OUTPUT); // asetetaan input-pinnit: pinmode(nappi1, INPUT); pinmode(nappi2, INPUT); void loop(){ // luetaan nappien tila: napintila1 = digitalread(nappi1); napintila2 = digitalread(nappi2); // mikäli jompaa kumpaa nappia painetaan, // vastaavan muuttujan tila on HIGH: if (napintila1 == HIGH) { // tuotetaan 300 Hz ääni ja sammutetaan ledi: digitalwrite(ledi, LOW); tone(kaiutin, 300); else if (napintila2 == HIGH) { // tuotetaan 450 Hz ääni ja sammutetaan ledi: digitalwrite(ledi, LOW); tone(kaiutin, 450); else { //Mikäli nappeja ei paineta, on niiden tila LOW // tässä tapauksessa sytytetään ledi ja vaiennetaan // kaiutin notone(kaiutin); digitalwrite(ledi, HIGH); Tehtävä: Muuta ohjelmaa niin, että syntyy erilainen ääni, kun kumpaakin nappia painetaan yhtä aikaa. Vihje: yhtäaikaisessa painamisessa lisää if-lauseen ehtoon vertailu kummankin napin arvosta. K.Blinnikka: Arduino tutuksi 35
. Keskellä oleva output-napa (napa 2) kytketään Arduinon analogiseen input-pinniin.")
36 Lämpötilan mittaaminen TMP36 on lämpötilan mittaamiseen tarkoitettu mikropiiri, jossa on 3 liitäntänastaa. Mikropiirin uloimmat liitäntänavat liitetään Arduinon +5 V- ja GND-pinneihin (kuvassa navat 1 ja 3). Keskellä oleva output-napa (napa 2) kytketään Arduinon analogiseen input-pinniin. Mikropiirin output-navan jännite riippuu lämpötilasta lineaarisesti 10 mv/ o C. Lämpötila 0 o C aiheuttaa 500mV (0,5 V) jännitteen Siis 20 o C aiheuttaa 700 mv (0,7 V) jännitteen. Valmistaja takaa anturin mittaustarkkuuden lämpötilavälille o C. Lämpötila-anturin voi kytkeä helposti Arduinoon. Muista, että analoginen input toimii niin, että jännite 0 5 volttia muunnetaan kokonaisluvuksi Jännitteen saat laskettua analogisen pinnin lukemasta: Jännite = Lukema V Jännitteestä saadaan edelleen lämpötila Lämpötila = (Jännite 0,5) 100 K.Blinnikka: Arduino tutuksi 36
37 Tehtävät 1. Kokoa oheinen kytkentä koekytkentälevylle. Pidä ehdottomasti huoli, että lämpötila-anturi tulee oikeinpäin (+5 V ja GND oikein). Muuten anturipiiri saattaa kuumentua ja rikkoutua. 2. Piirrä kytkentäkaavio vihkoosi. 3. Kokeile lämpötilan mittausta malliohjelman avulla. Lukema näkyy näytöllä Arduinon sarjamonitorilla. //TMP36 lämpötila-anturin kokeilua int anturipinni = 0; // Anturi on yhdistetty analogiseen pinniin 0 void setup() { Serial.begin(9600); // avataan sarjaporttiyhteys, jotta näemme lukeman näytöllä void loop() { int lukema = analogread(anturipinni); // luetaan analogisen pinnin lukema float jannite = lukema * 5.0; jannite /= ; // muunnetaan lukema jännitteeksi Serial.print(jannite); Serial.println(" volttia"); // tulostetaan jännite float lampotila = (jannite - 0.5) * 100 ; // muunnetaan jännite lämpötilaksi Serial.print(lampotila); Serial.println(" astetta"); //tulostetaan lämpötila delay(1000); // odotetaan sekunti Lisätehtäviä: 4. Lisää koekytkentälevylle pietsosähköinen kaiutin tai ledi ja 220 ohmin vastus. Muokkaa ohjelmaa niin, että saat lämpötilahälyttimen. Hälytin ilmaisee tietyn lämpötilan saavuttamisesta esimerkiksi hälytysäänellä tai vilkuttamalla lediä. 5. Muuta kytkentää ja ohjelmaa niin, että saat potentiometrillä asetettua halutun hälytyslämpötilan. Lisää potentiometri +5 V ja GND-napojen väliin, niin että luet potentiometrin liukukoskettimen jännitteen jollakin Arduinon analogisella pinnillä. Kirjoita vihkoon asiat, joita tarvitset ohjelmaa varten ja suunnittele etukäteen. 6. Etsi Internetistä TMP36 mikropiirin tiedot (TMP36 datasheet) ja tutustu mikropiirin ominaisuuksiin. K.Blinnikka: Arduino tutuksi 37

38 Valaistuksen mittaaminen 1. Jännitteenjakajakytkentää voi käyttää esimerkiksi LDR-vastuksen kanssa (LDR = Light Dependent Resistor). Mitä oheinen ohjelma tekee? Vertaa aiempaan potentiometrin lukuohjelmaan. // Valaistuksen mittaaminen LDR-vastuksella. int ledi = 13; // Arduinolevyllä valmiina oleva ledi (pinni 13) void setup() { pinmode(ledi, OUTPUT); // asetetaan pinni 13 OUTPUT-pinniksi void loop() { int aika = analogread(a0); // luetaan analogisen pinnin A0 jännite digitalwrite(ledi, HIGH); // ledi syttyy delay(aika); // viive, aika on jännitteenjakajalta luettu jännite digitalwrite(ledi, LOW); // ledi sammuu delay(aika); // viive, aika on jännitteenjakajalta luettu jännite 2. Kirjoita oheinen koodi ja lataa se Arduinoon. Ohjelmalla saat tulostettua sarjaportin arvon (valaistukseen verrannollisen luvun) tietokoneen ruudulle. Mikäli käytössäsi on valaistusmittari, voit kalibroida Arduinokytkennästä oikean valaistusmittarin. Ota mallia lämpötilan mittausohjelmasta. K.Blinnikka: Arduino tutuksi 38
39 // Jännitteen lukeminen analogisesta pinnistä void setup() { Serial.begin(9600); // asetetaan sarjaportin nopeudeksi 9600 bittiä sekunnissa void loop() { // luetaan analogisen pinnin A0 jännite int lukema = analogread(a0); // tulostetaan lukema sarjaporttiin Serial.println(lukema); delay(100); // viive arvojen lukemiseen 3. Lisää johonkin digitaaliseen output-pinniin ledi ja 220 ohmin vastus. Katso mallia ledin vilkutustöistä. Täydennä ohjelmaa niin, että saat tehtyä yövalaisimen. Kun valaistus pienenee riittävästi, niin ledi syttyy. Piirrä vihkoon kytkennän piirikaavio. Käytä ohjelman pohjana edellisessä tehtävässä annettua valaistusmittarin ohjelmaa. Muokkaa ohjelmaa niin, että saat ledin sytytettyä ja sammutettua valaistuksen mukaan. Katso tarvittaessa esimerkkiä työstä Jännitteen mittaus (tutkimuksen kohta 3) Tutki, mikä olisi sopiva arvo vertailulukemaksi. Käytä apuna sarjaportin monitoria. Kun ohjelma on valmis, voit kommentoida pois sarjaporttiin liittyvät ohjelmarivit (lisää //-merkit ohjelmarivin eteen, jolloin rivien yli hypätään ohjelmaa käännettäessä). K.Blinnikka: Arduino tutuksi 39

40 Servon ohjaaminen Arduinolla Sähköinen servo on sähkömoottorilla toteutettu ohjainlaite, jonka akselia voidaan säätää tarkasti tiettyyn kulmaan. Servon akselia voi kääntää esimerkiksi astetta. Servoja käytetään esimerkiksi kaukoohjattavissa laitteissa tai roboteissa liikkeiden ohjaukseen. Servomoottorissa on tyypillisesti kolme johdinta: virta, maa ja signaali. Johtimien päissä on yleensä liitin, johon voi kokeilukytkennöissä laittaa hyppylangan pätkät Arduinoon liittämiseksi. Tehtävät: 1. Kytke servon virtajohdin (punainen) Arduinon +5 V-napaan, maa (musta) GNDnapaan ja signaalijohto (keltainen) haluamaasi digitaaliseen output-pinniin (esimerkeissa pinni 9). Kytke servon virtajohtojen (+5 V ja GND) väliin 100 F elektrolyyttikondensaattori. Kondensaattori on komponentti, joka varastoi sähköä. Kun servoa käytetään, se voi välillä ottaa suuren virtapiikin Arduinon pinneistä. Tällöin pinnin jännite voi notkahtaa alas ja aiheuttaa häiriötilanteen. Kondensaattoriin varastoitunut sähkö estää tämän. Muista kytkeä elko oikeinpäin (+ ja navat oikein!). Lataa oheinen ohjelma Arduinolle. Ohjelma kääntää servon akselin aluksi alkuasentoon 0 asteen kulmaan, sen jälkeen 90 ja 120 asteen kulmiin. Ohjelmassa käytetään hyväksi valmista servokirjastoa, jossa on valmiit komennot ja funktiot servon ohjaamiseen. Kirjasto liitetään ohjelmaan alussa olevalla lauseella #include <servo.h>. // Servon ohjaaminen #include <Servo.h> Servo munservo; // Käytetään Servo-kirjastoa // Määritetään objekti munservo void setup() { munservo.attach(9); // Liitetään munservo pinniin 9 void loop() { munservo.write(0); delay(500); munservo.write(90); delay(500); munservo.write(120); delay(1000); // Ohjataan servo 0 asteen kulmaan // Odotetaan 0,5 sekuntia // Ohjataan servo 90 asteen kulmaan // Odotetaan 0,5 sekuntia // Ohjataan servo 120 asteen kulmaan // Odotetaan 1 sekunti K.Blinnikka: Arduino tutuksi 40
 Kokeile valmista Arduino-sivuston esimerkkiä Sweep, jossa servon akseli pyyhkäisee 180 asteen sektorin alueen edestakaisin.")
41 2. (löytyy ohjelmaeditorin valikosta File Examples Servo) Kokeile valmista Arduino-sivuston esimerkkiä Sweep, jossa servon akseli pyyhkäisee 180 asteen sektorin alueen edestakaisin. Esimerkissä käytetään for-silmukkaa. Tutki silmukan toimintaa Arduinon ohjesivuilta (löytyy ohjelmaeditorin valikosta File Examples Servo) Kokeile esimerkkiohjelmaa Knob. Tässä ohjelmassa servon asentoa säädetään potentiometrillä. Potentiometri kannattaa kiinnittää koekytkentäalustaan. Esimerkissä käytetään map-funktiota muunnokseen (analogread funktion antama luku) (servon kääntökulma). Tutustu mapfunktioon Arduinon sivuilla. Servon avulla voi tehdä esimerkiksi analogisen näyttöpaneelin. Servosta, pahvilaatikosta ja jäätelötikusta on askarreltu viisarinäyttö. Asteikon voi tehdä suoraan paneeliin piirtämällä tai tietokoneen grafiikkaohjelmalla. K.Blinnikka: Arduino tutuksi 41
42 PWM Pulse Width Modulation Digitaalisen output-pinnin jännite on aina 0 tai 5 volttia. Joskus olisi tarpeen säätää esimerkiksi ledin kirkkautta tai sähkömoottorin pyörimisnopeutta. Tällöin voi käyttää PWM-signaalia (PWM = Pulse Width Modulation) Käsky analogwrite syöttää digitaaliselle lähtönavalle kanttiaaltoa niin, että signaalin pulssisuhdetta (Duty Cycle) voi muuttaa. Kun pulssisuhde on 50 %, niin sähköteho on vastaavasti 50 % heikompi kuin jatkuva sähkövirta. Pulssisuhde 0% vastaa 0 V jännitettä, 100% vastaa +5 V jännitettä. PWM-pinnit on merkitty Arduinon piirilevylle aaltokuviolla ~. Arduino Unossa digitaaliset pinnit 3, 5, 6, 9, 10, 11 voivat tuottaa PWM-signaalia. PWMsignaalin taajuus on 490 Hz (joissakin pinneissä 980 Hz) PWM-pinnit Syntaksi: analogwrite(pinni, arvo) Parametri arvo on kokonaislukumuuttuja ja sen arvo voi vaihdella välillä vastaa pulssisuhdetta 0%, 255 pulssisuhdetta 100%. Esim. analogwrite(10, 64) syöttää pinniin 10 signaalia, jonka pulssisuhde on 25 %. K.Blinnikka: Arduino tutuksi 42
.")
43 Tehtäviä: Välineet Arduino Uno, koekytkentäalusta ja hyppylankoja vastus 220 ledi (tarvittaessa useampia) potentiometri 10 k vastus 10 k, painonappikytkin (tarvittaessa useampia) 1. Kytke ledi ja 220 ohmin vastus Arduinon pinniin 10 (tarkista, että pinnissä on PWM-merkintä ~). Lataa Arduinolle ohjelma int led = 10; void setup() { // analogwrite ei vaadi pinmode asetusta void loop() { analogwrite(led, 255); // ledi kirkas delay(1000); // odotetaan sekunti analogwrite(led, 130); // ledi himmenee delay(1000); // odotetaan sekunti analogwrite(led, 20); // ledi himmein delay(1000); // odotetaan sekunti 2. Kytke potentiometrin äärinavat +5 V- ja GNDpinneihin. Potentiometrin liuku kytketään analogiseen pinniin A2. Laadi ohjelma, jolla voit säätää portaattomasti ledin kirkkautta potentiometrillä säätämällä. Avaa esimerkiksi AnalogReadSerial ohjelmaesimerkki ja aloita ohjelman muokkaus siitä (vaihda A0 A2). Voit avata myös sarjaportin monitorin, jolla voit tarkistaa muuttujien arvot. Mieti: Potikkaa luettaessa funktio analogread antaa tuloksen PWM-pinniin vaaditaan kuitenkin arvo Miten saadaan muutettua ? K.Blinnikka: Arduino tutuksi 43
44 Eräs mahdollinen ohjelmaesimerkki on seuraava: int Ledi = 10; // Ledi kytketään pinniin 10 int Potikka = 2; // Potentiometrin jännite luetaan analogisesta pinnistä 2 (0 5 V) int arvo = 0; // Muuttuja, johon potikan lukema talletetaan ( kokonaisluku ) void setup() { void loop() { arvo = analogread(potikka); // Luetaan potikan arvo analogwrite(ledi, arvo/4); // Muutetaan potikan arvo analogwrite-käskylle sopivaksi Lisää toinen ledi ja 220 ohmin vastus toiseen PWM-pinniin (esim. pinni 11). Muuta kohdan 2 ohjelmaa niin, että ledien kirkkaus muuttuu päinvastaisesti, siis toisen loistaessa kirkkaasti, toinen ei pala. Potentiometristä säätämällä toinen himmenee ja toinen kirkastuu. Mieti: Miten saat ? 4. For-silmukka Ledin himmentäminen for-silmukan avulla Säilytä edellisen esimerkin ledikytkentä ja kokeile ohjelmaa: // Ledin himmentäminen FOR-silmukan avulla int Ledi = 10; // asetetaan muuttujan Ledi arvoksi 10 void setup() { void loop() { for (int i=0; i <= 255; i++) { analogwrite(ledi, i); delay(10); Selvitä itsellesi ohjelman toiminta. Kokeile, mitä tapahtuu, kun vaihdat käskyksi analogwrite(ledi, 255-i); K.Blinnikka: Arduino tutuksi 44
45 5. Lisää kytkentään painonappi ja vastus. Katso aiemmista tutkimustehtävistä mallia. Muokkaa ohjelmaa niin, että painonappia painamalla saat ledin himmentymään/kirkastumaan. Voit lisätä myös useampia kytkimiä ja ledejä Arduinon napoihin ja laatia niille toimintoja. Lisää kytkentään esimerkiksi kaksi painonappia, joista ensimmäistä painamalla ledi kirkastuu, toista painamalla ledi himmenee. K.Blinnikka: Arduino tutuksi 45
46 Moottorin ohjaaminen Arduinolla Välineet Arduino Uno, koekytkentäalusta ja hyppylankoja MOSFET IRF520 potentiometri 10 k diodi (esim. 1N4005) 9 V paristo ja paristoneppari (tai vastaava virtalähde) Transistorin IRF520 johdinjärjestys 1. Tee oheinen kytkentä, kirjoita ohjelma ja kokeile toimintaa. Moottorin rinnalle on kytketty diodi. Diodin tehtävänä on oikosulkea mahdolliset jännitepiikit, joita moottori aiheuttaa ja jotka voisivat vioittaa Arduinoa. 2. Mikäli sinulla on käytössä Arduino Starter Kit, aseta siinä oleva vanerinen CD-levyn pyörittäjä moottorin akselille. Starter Kit-sarjassa on myös värillinen pahvilevy, jota voi pyörittää moottorilla. Mikäli sinulla ei ole Starter kittiä, laita esimerkiksi maalarinteipin pätkä moottorin akselille, niin näet moottorin pyörimisen. 3. Kokeile moottorin pyörittämistä ensin pelkästään ohjelmallisesti, ilman nopeudensäätöä potentiometrillä. Kertaa sivulta 40 PWM-säädön periaate. Kirjoita koodi ja syötä se Arduinolle. // Moottorin nopeuden säätö ohjelmallisesti const int transistoripin = 9; // MOSFETin ohjauspinni int nopeus = 64; // säädetään nopeus void setup() { pinmode(transistoripin, OUTPUT); // Asetetaan OUTPUT-pinni void loop() { analogwrite(transistoripin, nopeus); // Kirjoitetaan PWM-ohjaus transistorille Kokeile muuttujalle nopeus arvoja välillä K.Blinnikka: Arduino tutuksi 46
47 4. Tutki moottorin säätöä potentiometrillä. Muuta koodia niin, että Arduinon analoginen pinni lukee potentiometrin liukukoskettimen jännitettä. Jännitettä voi säätää 0 5 voltin välillä.. // Moottorin nopeuden säätö const int potikkapin = 0; // Potentiometrin liuku analogiseen pinniin 0 const int transistoripin = 9; // MOSFETin ohjauspinni int potikka; // Potentiometriltä palautettu arvo void setup() { pinmode(transistoripin, OUTPUT); // Asetetaan OUTPUT-pinni void loop() { potikka = analogread(potikkapin)/4; // Luetaan potentiometri ja muutetaan samalla arvo sopivaksi PWM-funktiota varten analogwrite(transistoripin, potikka); // Kirjoitetaan PWM-ohjaus transistorille Voit kokeilla kytkentää myös lampun ohjaamiseen. Esimerkiksi valo-opin ilmiöiden tutkimiseen käytettävä 6 voltin lamppu sopii hyvin kytkentään. Lamppu kytketään moottorin tilalle. Lampun kanssa suojadiodin voi jättää pois. Moottoriin on kytketty ulkoinen virtalähde, esimerkiksi 9 V neppariparisto. Moottori ei siis toimi Arduinon sähkövirralla. Mikäli ohjaat kytkennällä valo-opin tutkimuksissa käytettyä suurivirtaista lamppu, niin käytä lampun virtalähteenä oppilasvirtalähdettä. Pidä huoli, että transistori ei tällöin kuumene liikaa. K.Blinnikka: Arduino tutuksi 47

48 Tehtävät: 1. Miksi potentiometriltä luettu arvo jaetaan neljällä? 2. Transistoria ohjataan PWM-signaalilla. Mitä tämä tarkoittaa? Arduinon pinnin antama maksimi sähkövirta on noin 40 ma. Tämä virta ei riitä käyttämään suuritehoisia laitteita, kuten sähkömoottoria tai suuritehoisia lamppuja. Arduinoon voidaan kuitenkin kytkeä ulkoinen komponentti, joka puolestaan säätää moottorissa kulkevaa virtaa. Ohjauskomponenttina voidaan käyttää esimerkiksi transistoria. Esimerkkikytkennässä käytetään FET-transistoria, joka ei vaadi muita komponentteja ympärilleen. IRF520 on kytkintarkoituksiin valmistettu MOSFET, jonka johdinjärjestys on oheisessa kuvassa (G = Gate, hila, D = Drain, S = Source). Transistoria voi verrata äärimmäisen nopeaan kytkimeen, jossa ei ole lainkaan liikkuvia osia. Hilan (G) jännitteellä voidaan vaikuttaa D- ja S-napojen välillä kulkevaan sähkövirtaan. Kun jännitettä ei ole, virtaa ei kulje, kun hilalla on jännite, niin virta kulkee. K.Blinnikka: Arduino tutuksi 48
 Tehtävät: 1. Tee oheinen kytkentä koekytkentälevylle. Anturissa on neljä kytkentäpinniä: +5 V, GND, Trig ja Echo.")
49 Ultraäänianturin liittäminen Arduinoon Välineet Arduino Uno, koekytkentäalusta ja hyppylankoja Ultraäänianturi HC-SR04 (anturi mittaa etäisyyksiä välillä cm) Komponentteja hälytintä varten (esim. pietsosähköinen kaiutin, ledi vastus tms.) Tehtävät: 1. Tee oheinen kytkentä koekytkentälevylle. Anturissa on neljä kytkentäpinniä: +5 V, GND, Trig ja Echo. Pinneihin +5 V ja GND kytketään käyttöjännite. Pinniin Trig johdetaan kytkentäliipaisu (Trigger = liipaisin). Pinnistä Echo (Echo = kaiku) saadaan esineen etäisyyteen verrannollinen pulssi. Trigger kytketään digitaaliseen pinniin 6, Echo pinniin Ohjelmassa käytetään kirjastoa, jossa on valmiit komennot ja funktiot ultraäänianturin ohjaamiseen. Tätä kirjastoa ei ole valmiiksi asennettuna Arduinoympäristöön. Kirjasto täytyy asentaa erikseen. Hae kirjasto osoitteesta --> Download. Manuaalisesti kirjaston voit asentaa purkamalla kansion Arduinoympäristön Libraries-kansioon. Sammuta editoriohjelma ja käynnistä uudelleen. Ohjelma etsii uuden kirjaston ja se on Arduino-ohjelmien käytettävissä. K.Blinnikka: Arduino tutuksi 49
50 3. Kirjoita editoriin oheinen ohjelma. Kirjasto liitetään ohjelmaan alussa olevalla lauseella #include <NewPing.h>. Mittaustulokset luetaan tietokoneen sarjaportin monitorista. Malliohjelmassa on määritelty vakioita #define lauseilla. // Ultraäänianturi #include <NewPing.h> // otetaan kirjasto NewPing.h käyttöön NewPing sonar(6, 7, 200); // Alustetaan NewPing // pinni 6 trigger output, pinni 7 echo input, maksimietäisyys 200 cm void setup() { Serial.begin(9600); void loop() { delay(1000); int etaisyys = sonar.ping_cm(); Serial.print("Etäisyys: "); Serial.print(etaisyys); Serial.println(" cm"); // Avataan sarjaportti // Etäisyyden mittaus sekunnin välein // Mitataan etäisyys senttimetreinä // Tulostetaan näytölle 4. Tarkista anturin mittaustarkkuus metrimitan avulla. Aseta mitta niin, että nollakohta on anturin kohdalla ja heijastukset tapahtuvat jostakin kovasta pinnasta, esimerkiksi kirjasta. Ovatko mittaustulokset oikeita? Tutustu kirjaston dokumentaatioon osoitteessa Kirjaston komennoista ja funktioista käytetään nimitystä metodi. 5. Laajenna kytkentää niin, että saat jonkin toimivan laitteen, esimerkiksi hälytyksen ledin tai summerin avulla. Voit tehdä peruutustutkan mopolle! Huom.: Arduinon tone-käsky ei toimi NewPing kirjaston kanssa. Etsi hakupalvelun avulla kirjasto NewTone, jonka avulla saat äänimerkin toimimaan. K.Blinnikka: Arduino tutuksi 50


51 LCD-näytön liittäminen Arduinoon Välineet Arduino Uno, koekytkentäalusta ja hyppylankoja LCD-näyttö (LCD tulee sanoista Liquid Crystal Display eli nestekidenäyttö) potentiometri 10 k, 220 vastus, lämpötila-anturi TMP36 Arduinoon voi liittää LCD-näytön. Näytössä on 16 liitäntäpinniä, joista näyttöä ohjataan. LCD pinni kytketään 1 VSS Arduino GND 2 VDD Arduino +5 V 3 kontrasti Potentiometrin liuku 4 Register Select Arduino pinni 12 (RS) 5 Read/Write (RW) GND 6 Enable Arduino pinni 11 7 Data 0 Ei kytketä 8 Data 1 Ei kytketä 9 Data 2 Ei kytketä 10 Data 3 Ei kytketä 11 Data 4 Arduino pinni 5 12 Data 5 Arduino pinni 4 13 Data 6 Arduino pinni 3 14 Data 7 Arduino pinni 2 15 Taustavalo ohm vastus +5 V 16 Taustavalo GND Arduino GND K.Blinnikka: Arduino tutuksi 51
52 1. Kytke LCD-näyttö huolellisesti. Aloita liitinrivin jommastakummasta päästä ja etene liitin kerrallaan. Kun USB-kaapeli kytketään Arduinoon, niin taustavalon tulisi syttyä näyttöön. Potentiometristä säädetään näytön kontrastia. Mikäli näytössä ei näy mitään, tarkista potentiometrin liitäntäpinnit. LCD-näyttöä varten ohjelmaan ladataan kirjasto LiquidCrystal. Kirjasto on oletuksena jo asennettu Arduinon editoriohjelman mukana. Kokeile ohjelmanpätkää: // LCD-näytön kokeilua // otetaan LCD-kirjasto käyttöön #include <LiquidCrystal.h> //määritetään ohjelmalle käytössä olevat Arduinon pinnit LiquidCrystal lcd(12, 11, 5, 4, 3, 2); void setup() { //asetetaan LCD-näytön rivien ja sarakkeiden lukumäärä lcd.begin(16, 2); void loop() { lcd.print("hello, world!"); //tulosta näytölle teksti // tulostetaan luvut nollasta kymmeneen näytön toiselle riville for (int i=0; i<=10;i++) { lcd.setcursor(0, 1); // aseta kursori kakkosrivin alkuun (numerointi alkaa nollasta) lcd.print(i); //tulostetaan muuttujan i arvo delay(500); // odotetaan 0,5 sekuntia lcd.clear(); // tyhjennetään näyttö 2. Tutustu LiquidCrystal-kirjaston dokumentaatioon ( ja kokeile valmiita harjoitusohjelmia. 3. Selvitä, mitä ovat kirjastosta löytyvät metodit. 4. Kokeile lisätä kytkentään jokin anturi (esimerkiksi lämpötila-anturi) ja tutki miten saat anturin lukeman LCDnäytölle. K.Blinnikka: Arduino tutuksi 52
53 Oman funktion tekeminen Toistuvia toimintoja voit koota kätevästi aliohjelmiksi (funktioiksi). Toiminnot ohjelmoidaan erilleen varsinaisesta pääohjelmasta (loop-silmukka), jolloin vältytään saman ohjelmakoodin kirjoittamisesta uudelleen ja uudelleen. Kukin lohko, aliohjelma, tekee jonkin toiminnon, esimerkissä kääntää servon haluttuun asentoon, antaa halutun äänimerkin tai käy lukemassa anturin mittausarvon. Aliohjelmasta käytetään myös nimityksiä proseduuri, funktio, metodi tai rutiini. C-kielessä, johon Arduinon koodi perustuu, käytetään yleisesti nimitystä funktio. Tutki oheisia ohjelmaa ja lataa ne Arduinolle. 1. Servon ohjaus: Ohjelmalla ohjataan servoa ja ohjelman toiminnot on sijoitettu aliohjelmiin. Sana void funktion määrittelyssä tarkoittaa, että funktio ei palauta pääohjelmalle mitään arvoa. Funktiolle syötetään muuttujiksi kokonaislukumuuttujat kulma ja aika. Kytkentä on sama kuin aiemmassa servotutkimuksessa. Kokeile muuttaa funktiolle kaannaservo annettavien muuttujien arvoja. (Huom.: kulman arvon tulee olla välillä astetta. Aika ei voi olla kovin nopea, johtuen servon hitaudesta) // Servon ohjaaminen omalla funktiolla #include <Servo.h> Servo munservo; // Käytetään Servo-kirjastoa // Määritetään objekti munservo void setup() { munservo.attach(9); // Liitetään munservo pinniin 9 // Määritetään funktio kaannaservo, jolle annetaan muuttujat kulma ja aika void kaannaservo(int kulma, int aika) { munservo.write(kulma); // Ohjataan servo muuttujassa kulma määritettyyn kulmaan delay(aika); // Odotetaan muuttujassa aika määritetty aika // Pääohjelma alkaa void loop() { kaannaservo(0, 1000); kaannaservo(45, 1000); kaannaservo(90, 2000); kaannaservo(135, 500); kaannaservo(180, 400); // Käännetään servo haluttuun kulmaan // ja odotetaan annettu aika K.Blinnikka: Arduino tutuksi 53
54 1. Äänen tuottaminen Seuraava ohjelma tuottaa nousevan äänen Arduinon pinniin 11. Aliohjelma nousu on laadittu niin, että sitä kutsuttaessa annetaan äänen alku- ja lopputaajuudet eli ns. parametrit. Parametri tarkoittaa käskylle annettavia alkuarvoja, joiden mukaan toiminto suoritetaan. Kytke pietsokaiuttimen navat Arduinon pinniin 9 ja GND-pinniin ja lataa oheinen ohjelma. void setup() { // asetuksia ei vaadita void nousu(int alku, int loppu) // aliohjelma, parametreinä alku- ja lopputaajuus { for (int taajuus=alku; taajuus < loppu; taajuus++) { tone(11, taajuus, 50); // silmukkaa pyöritetään, kunnes saavutetaan lopputaajuus delay(50); void loop() { nousu(100, 600); nousu(300, 800); nousu(500, 1000); // pääohjelma // kutsutaan funktiota nousu, 100 Hz - - > 600 Hz // kutsutaan funktiota nousu // kutsutaan funktiota nousu 2. Lisää ohjelmarunkoon funktio nimellä lasku, joka tuottaa laskevan äänen (vinkki for-silmukkaan: i- - tarkoittaa i = i - 1). Kokeile nousu- ja lasku-funktioita peräkkäin niin, että kutsut niitä pääohjelmasta. Toimiiko? Muokkaa aliohjelmia niin, että lisäät funktiolle annettavaksi parametriksi pinnin, johon kaiutin on kytketty. Kysy tarvittaessa neuvoa. 3. Tee kytkentä ja ohjelma, jossa simuloit hälytysajoneuvoa ( piipaa-auto ). Lisää kytkentään ledi ja 220 ohmin vastus (tai useampia), niin saat vilkkuvalot. Ohjelman voit laatia niin, että a) koko ohjelma on pääohjelmassa (loop-silmukka), b) ohjelma on jaettu aliohjelmiin, joita kutsutaan pääohjelmasta. Kokeile kumpaakin tapaa! K.Blinnikka: Arduino tutuksi 54

55 Oman laitteen tekeminen projektityö Voit yhdistellä tässä vihkosessa esitettyjä aihioita helposti. Suunnittelun apuna voi käyttää alla olevaa listaa, jossa on kuvattu Arduinolle ohjelmoitavia toimintoja. Voit tehdä esimerkiksi lämpömittarin, jossa on LCD-näyttö. Lämpömittariin voit lisätä ledin tai summerin hälytystä varten. Lämpömittarista voit tehdä myös vaikkapa viisarinäyttöisen (servo + osoitinviisari) tai voit toteuttaa näytön ledipatsaan muotoon. Lämpömittari voi sähköttää lukeman Morse-aakkosilla. Mahdollisuuksia on paljon! Ideoita kannattaa etsiä Internetistä. Erityisesti esim. - Arduinon omat sivut - sivusto (sivustolla on paljon Arduinoon liittyviä laitteita, hakusana Arduino) - youtube (hakusanana Arduino + haettava asia, esim. arduino led cube) Laitteen mekaaninen toteutus on usein haastavin osa projektia. Internetin kauppapaikoilta löytyy esimerkiksi valmiita runkoja liikkuvaa robottiautoa varten. Valmis runko helpottaa huomattavasti laitteen mekaanista toteutusta. Vihkosen lopussa on ohjeita projektityön toteutukseen. K.Blinnikka: Arduino tutuksi 55
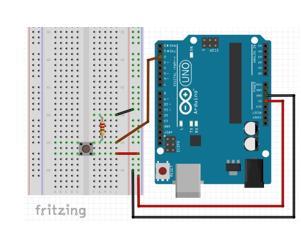
Liikennevalot. Arduino toimii laitteen aivoina. Arduinokortti on kuin pieni tietokone, johon voit ohjelmoida toimintoja.
 Liikennevalot Laite koostuu Arduinokortista ja koekytkentälevystä. Liikennevalon toiminnat ohjelmoidaan Arduinolle. Ledit ja muut komponentit asetetaan koekytkentälevylle. Arduino toimii laitteen aivoina.
Liikennevalot Laite koostuu Arduinokortista ja koekytkentälevystä. Liikennevalon toiminnat ohjelmoidaan Arduinolle. Ledit ja muut komponentit asetetaan koekytkentälevylle. Arduino toimii laitteen aivoina.
Tällä ohjelmoitavalla laitteella saat hälytyksen, mikäli lämpötila nousee liian korkeaksi.
 Lämpötilahälytin Tällä ohjelmoitavalla laitteella saat hälytyksen, mikäli lämpötila nousee liian korkeaksi. Laite koostuu Arduinokortista ja koekytkentälevystä. Hälyttimen toiminnat ohjelmoidaan Arduinolle.
Lämpötilahälytin Tällä ohjelmoitavalla laitteella saat hälytyksen, mikäli lämpötila nousee liian korkeaksi. Laite koostuu Arduinokortista ja koekytkentälevystä. Hälyttimen toiminnat ohjelmoidaan Arduinolle.
LUMA SUOMI -kehittämisohjelma LUMA FINLAND -utvecklingsprogram LUMA FINLAND development programme Ohjelmointia Arduinolla
 Ohjelmointia Arduinolla Kyösti Blinnikka, Olarin koulu ja lukio LUMA-keskus Aalto Mikä on Arduino? Open Source Electronics Prototyping Platform Arduino on avoimeen laitteistoon ja ohjelmistoon perustuva
Ohjelmointia Arduinolla Kyösti Blinnikka, Olarin koulu ja lukio LUMA-keskus Aalto Mikä on Arduino? Open Source Electronics Prototyping Platform Arduino on avoimeen laitteistoon ja ohjelmistoon perustuva
Arduino. Kimmo Silvonen (X)
") Arduino Kimmo Silvonen (X) Arduino, toimiva oma versio (osat Pajalla) ATmega 328P IC DIL-kotelossa (DIP) päältä katsottuna, Arduinon pinnit +5 V TX RX DTR FT232 10k 22p 22p Reset 1 RX D0 TX D1 D2 PWM D3
Arduino Kimmo Silvonen (X) Arduino, toimiva oma versio (osat Pajalla) ATmega 328P IC DIL-kotelossa (DIP) päältä katsottuna, Arduinon pinnit +5 V TX RX DTR FT232 10k 22p 22p Reset 1 RX D0 TX D1 D2 PWM D3
Ohjelmoi Arduino Grovella
 Ohjelmoi Arduino Grovella Tomi Hukkalainen ja Kati Sormunen 25.9.2016 2016 Innokas 1 Tarvikkeet 25.9.2016 2016 Innokas 2 Tarvikkeet Näissä harjoituksissa käytetään Seeduino Lotus piirilevyä, jossa käytetään
Ohjelmoi Arduino Grovella Tomi Hukkalainen ja Kati Sormunen 25.9.2016 2016 Innokas 1 Tarvikkeet 25.9.2016 2016 Innokas 2 Tarvikkeet Näissä harjoituksissa käytetään Seeduino Lotus piirilevyä, jossa käytetään
Arduino. Kimmo Silvonen (X)
") Arduino Kimmo Silvonen (X) Arduinon ohjelmointiympäristön installointi Teensyn (2.0) installointi Arduino IDE:n alle IDE = Integrated Development Environment Arduino UNO, ym.: https://www.arduino.cc/en/guide/windows
Arduino Kimmo Silvonen (X) Arduinon ohjelmointiympäristön installointi Teensyn (2.0) installointi Arduino IDE:n alle IDE = Integrated Development Environment Arduino UNO, ym.: https://www.arduino.cc/en/guide/windows
Adafruit Circuit Playground Express
 Adafruit Circuit Playground Express Ulkoiset LEDit ja moottorit Sini Riikonen, sini.riikonen@helsinki.fi 6.6.2019 Adafruit Circuit Playground Express / Ledit ja moottorit / 2019 Innokas 1 Yleistä Circuit
Adafruit Circuit Playground Express Ulkoiset LEDit ja moottorit Sini Riikonen, sini.riikonen@helsinki.fi 6.6.2019 Adafruit Circuit Playground Express / Ledit ja moottorit / 2019 Innokas 1 Yleistä Circuit
Arduinon ohjelmointi. Sami-Petteri Pukkila. 6. helmikuuta 2017
 Sami-Petteri Pukkila sami-petteri.pukkila@aalto.fi Mistä kaikki lähtee liikkeelle? Ennen kuin alat ohjelmoimaan, mieti mitä projektissa kannattaa tehdä. Jaa projekti pieniin osaprojekteihin ja kehitä näille
Sami-Petteri Pukkila sami-petteri.pukkila@aalto.fi Mistä kaikki lähtee liikkeelle? Ennen kuin alat ohjelmoimaan, mieti mitä projektissa kannattaa tehdä. Jaa projekti pieniin osaprojekteihin ja kehitä näille
Arduino. Kimmo Silvonen (X)
") Arduino Kimmo Silvonen (X) Arduino, toimiva oma versio (osat Pajalla) ATmega 328P IC DIL-kotelossa (DIP) päältä katsottuna, Arduinon pinnit +5 V TX RX DTR FT232 10k 22p 22p Reset 1 RX D0 TX D1 D2 PWM D3
Arduino Kimmo Silvonen (X) Arduino, toimiva oma versio (osat Pajalla) ATmega 328P IC DIL-kotelossa (DIP) päältä katsottuna, Arduinon pinnit +5 V TX RX DTR FT232 10k 22p 22p Reset 1 RX D0 TX D1 D2 PWM D3
ELEC-A4010 Sähköpaja Arduinon ohjelmointi. Jukka Helle
 ELEC-A4010 Sähköpaja Arduinon ohjelmointi Jukka Helle Arduino UNO R3 6-20VDC 5VDC muunnin 16 MHz kideoskillaattori USB-sarjamuunnin (ATmega16U2) ATmega328 -mikro-ohjain 14 digitaalista I/O väylää 6 kpl
ELEC-A4010 Sähköpaja Arduinon ohjelmointi Jukka Helle Arduino UNO R3 6-20VDC 5VDC muunnin 16 MHz kideoskillaattori USB-sarjamuunnin (ATmega16U2) ATmega328 -mikro-ohjain 14 digitaalista I/O väylää 6 kpl
Mikro-ohjain µc harjoitukset - yleisohje
 Mikro-ohjain µc harjoitukset - yleisohje Keijo Salonen 20. marraskuuta 2016 Sisältö 1 Esittely 2 2 Arduino UNO R3 mikro-ohjain kortti 2 3 Koekytkentälevy 5 4 Elektroniikan komponentit 7 5 Työkalut ja muut
Mikro-ohjain µc harjoitukset - yleisohje Keijo Salonen 20. marraskuuta 2016 Sisältö 1 Esittely 2 2 Arduino UNO R3 mikro-ohjain kortti 2 3 Koekytkentälevy 5 4 Elektroniikan komponentit 7 5 Työkalut ja muut
Harjoitustyö - Mikroprosessorit Liikennevalot
 Saku Chydenius tammikuu 2004 Asko Ikävalko Harjoitustyö - Mikroprosessorit Liikennevalot Työn valvoja: Kimmo Saurén RAPORTTI 1(8) 1. Alkuperäinen tehtävänanto 2. Määritelmä valojen vaihtumiselle Muodosta
Saku Chydenius tammikuu 2004 Asko Ikävalko Harjoitustyö - Mikroprosessorit Liikennevalot Työn valvoja: Kimmo Saurén RAPORTTI 1(8) 1. Alkuperäinen tehtävänanto 2. Määritelmä valojen vaihtumiselle Muodosta
TAITAJA 2007 ELEKTRONIIKKAFINAALI 31.01-02.02.07 KILPAILIJAN TEHTÄVÄT. Kilpailijan nimi / Nro:
 KILPAILIJAN TEHTÄVÄT Kilpailijan nimi / Nro: Tehtävän laatinut: Hannu Laurikainen, Deltabit Oy Kilpailutehtävä Kilpailijalle annetaan tehtävässä tarvittavat ohjelmakoodit. Tämä ohjelma on tehty laitteen
KILPAILIJAN TEHTÄVÄT Kilpailijan nimi / Nro: Tehtävän laatinut: Hannu Laurikainen, Deltabit Oy Kilpailutehtävä Kilpailijalle annetaan tehtävässä tarvittavat ohjelmakoodit. Tämä ohjelma on tehty laitteen
1 Tarkistetaan että kaikki toimii
 Harjoituksen lopputuloksena on laite joka morsettaa vilkuttamalla Arduinon sisäänrakennettua lediä. Haluttu morsesarja annetaan laitteeseen kytketyltä tietokoneelta. Harjoitusta varten tarvitaan pelkästään
Harjoituksen lopputuloksena on laite joka morsettaa vilkuttamalla Arduinon sisäänrakennettua lediä. Haluttu morsesarja annetaan laitteeseen kytketyltä tietokoneelta. Harjoitusta varten tarvitaan pelkästään
S-108.3020 Elektroniikan häiriökysymykset. Laboratoriotyö, kevät 2010
 1/7 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö, kevät 2010 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä Viimeksi päivitetty 25.2.2010 / MO 2/7 Johdanto Sähköisiä
1/7 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö, kevät 2010 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä Viimeksi päivitetty 25.2.2010 / MO 2/7 Johdanto Sähköisiä
////// VENETIETO.FI \\\\\\ //// Autopilotti 2014 \\\\ //-PID säätimellä. #include <EEPROM.h> #include <SoftwareSerial.h>
 ////// VENETIETO.FI \\\\\\ //// Autopilotti 2014 \\\\ //-PID säätimellä #include #include SoftwareSerial gps(0, 1); // RX, TX -pinnit const int buttonpinset = 2; // painonäppäimen
////// VENETIETO.FI \\\\\\ //// Autopilotti 2014 \\\\ //-PID säätimellä #include #include SoftwareSerial gps(0, 1); // RX, TX -pinnit const int buttonpinset = 2; // painonäppäimen
P I C A X E O H J E L M O I N T I
 PICAXE OHJELMOINTI Tämä materiaalipaketti on tehty PICAXE piireihin perustuvaa elektroniikan opetusta varten. Tarkoituksena on opettaa ohjelmoitavan mikropiirin käyttöä erilaisissa sovellutuksissa. Lisää
PICAXE OHJELMOINTI Tämä materiaalipaketti on tehty PICAXE piireihin perustuvaa elektroniikan opetusta varten. Tarkoituksena on opettaa ohjelmoitavan mikropiirin käyttöä erilaisissa sovellutuksissa. Lisää
Operaatiovahvistimen vahvistus voidaan säätää halutun suuruiseksi käyttämällä takaisinkytkentävastusta.
 TYÖ 11. Operaatiovahvistin Operaatiovahvistin on mikropiiri ( koostuu useista transistoreista, vastuksista ja kondensaattoreista juotettuna pienelle piipalaselle ), jota voidaan käyttää useisiin eri kytkentöihin.
TYÖ 11. Operaatiovahvistin Operaatiovahvistin on mikropiiri ( koostuu useista transistoreista, vastuksista ja kondensaattoreista juotettuna pienelle piipalaselle ), jota voidaan käyttää useisiin eri kytkentöihin.
Python-ohjelmointi Harjoitus 2
 Python-ohjelmointi Harjoitus 2 TAVOITTEET Kerrataan tulostuskomento ja lukumuotoisen muuttujan muuttaminen merkkijonoksi. Opitaan jakojäännös eli modulus, vertailuoperaattorit, ehtorakenne jos, input-komento
Python-ohjelmointi Harjoitus 2 TAVOITTEET Kerrataan tulostuskomento ja lukumuotoisen muuttujan muuttaminen merkkijonoksi. Opitaan jakojäännös eli modulus, vertailuoperaattorit, ehtorakenne jos, input-komento
ELEC-A4010 Sähköpaja Arduinon ohjelmointi. Peter Kronström
 ELEC-A4010 Sähköpaja Arduinon ohjelmointi Peter Kronström Arduinon rakenne 5 voltin regulaattori 16 MHz kide USB-sarjamuunnin ATmega328 -mikrokontrolleri 20 I/O-pinniä, joista 14 digitaalista ja 6 analogista
ELEC-A4010 Sähköpaja Arduinon ohjelmointi Peter Kronström Arduinon rakenne 5 voltin regulaattori 16 MHz kide USB-sarjamuunnin ATmega328 -mikrokontrolleri 20 I/O-pinniä, joista 14 digitaalista ja 6 analogista
Tarkempaa tietoa saat myös kurssin GitHub-alustalta. Sen wiki-osio on kattava ja yksityiskohtainen, kun tämä vihkonen taas on vain ensihätään.
 Sisällys Johdanto... 3 Ohjeita materiaalin käyttöön... 3 Mikä on arduino?... 4 Arduino-alustan pinnijaottelu... 4 Koodin rakenne... 8 Pinnin määrittely... 9 Muuttujat... 10 Tyypillisimmät ohjelmointilauseet...
Sisällys Johdanto... 3 Ohjeita materiaalin käyttöön... 3 Mikä on arduino?... 4 Arduino-alustan pinnijaottelu... 4 Koodin rakenne... 8 Pinnin määrittely... 9 Muuttujat... 10 Tyypillisimmät ohjelmointilauseet...
DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä
 1 DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä JK 23.10.2007 Johdanto Harrasteroboteissa käytetään useimmiten voimanlähteenä DC-moottoria. Tämä moottorityyppi on monessa suhteessa kätevä
1 DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä JK 23.10.2007 Johdanto Harrasteroboteissa käytetään useimmiten voimanlähteenä DC-moottoria. Tämä moottorityyppi on monessa suhteessa kätevä
Supply jännite: Ei kuormaa Tuuletin Vastus Molemmat DC AC Taajuus/taajuudet
 S-108.3020 Elektroniikan häiriökysymykset 1/5 Ryhmän nro: Nimet/op.nro: Tarvittavat mittalaitteet: - Oskilloskooppi - Yleismittari, 2 kpl - Ohjaus- ja etäyksiköt Huom. Arvot mitataan pääasiassa lämmityksen
S-108.3020 Elektroniikan häiriökysymykset 1/5 Ryhmän nro: Nimet/op.nro: Tarvittavat mittalaitteet: - Oskilloskooppi - Yleismittari, 2 kpl - Ohjaus- ja etäyksiköt Huom. Arvot mitataan pääasiassa lämmityksen
kipinäpurkauksena, josta salama on esimerkki.
 Sähkö 25 Esineet saavat sähkövarauksen hankauksessa kipinäpurkauksena, josta salama on esimerkki. Hankauksessa esineet voivat varautua sähköisesti. Varaukset syntyvät, koska hankauksessa kappaleesta siirtyy
Sähkö 25 Esineet saavat sähkövarauksen hankauksessa kipinäpurkauksena, josta salama on esimerkki. Hankauksessa esineet voivat varautua sähköisesti. Varaukset syntyvät, koska hankauksessa kappaleesta siirtyy
GSRELE ohjeet. Yleistä
 GSRELE ohjeet Yleistä GSM rele ohjaa Nokia 3310 puhelimen avulla releitä, mittaa lämpötilaa, tekee etähälytyksiä GSM-verkon avulla. Kauko-ohjauspuhelin voi olla mikä malli tahansa tai tavallinen lankapuhelin.
GSRELE ohjeet Yleistä GSM rele ohjaa Nokia 3310 puhelimen avulla releitä, mittaa lämpötilaa, tekee etähälytyksiä GSM-verkon avulla. Kauko-ohjauspuhelin voi olla mikä malli tahansa tai tavallinen lankapuhelin.
Ohjelmointiharjoituksia Arduino-ympäristössä
 Ohjelmointiharjoituksia Arduino-ympäristössä Yleistä Arduino-sovelluksen rakenne Syntaksi ja käytännöt Esimerkki ohjelman rakenteesta Muuttujat ja tietotyypit Tietotyypit Esimerkkejä tietotyypeistä Ehtolauseet
Ohjelmointiharjoituksia Arduino-ympäristössä Yleistä Arduino-sovelluksen rakenne Syntaksi ja käytännöt Esimerkki ohjelman rakenteesta Muuttujat ja tietotyypit Tietotyypit Esimerkkejä tietotyypeistä Ehtolauseet
Let Me Hack It -kurssilla tarvittavat ohjelmat ja välineet
 Let Me Hack It -kurssilla tarvittavat ohjelmat ja välineet Tarvitset kurssilla tietokoneen jolla on: Windows, Mac OS X tai Linux -käyttöjärjestelmä. Vähintään yksi kurssin ohjelmointiympäristöistä (Processing
Let Me Hack It -kurssilla tarvittavat ohjelmat ja välineet Tarvitset kurssilla tietokoneen jolla on: Windows, Mac OS X tai Linux -käyttöjärjestelmä. Vähintään yksi kurssin ohjelmointiympäristöistä (Processing
OMNIA OPINNÄYTETYÖ AMMATTIOPISTO. Diginoppa ICTP09SLG OMNIAN AMMATTIOPISTO
 OMNIA AMMATTIOPISTO OPINNÄYTETYÖ Diginoppa ICTP09SLG - 2012 OMNIAN AMMATTIOPISTO KOULUTUSALA Tieto- ja tietoliikennetekniikka OPISKELIJA Hannu Junno OHJAAJA Jari Laurila VUOSI 2012 2 TIIVISTELMÄ Opinnäytetyöni
OMNIA AMMATTIOPISTO OPINNÄYTETYÖ Diginoppa ICTP09SLG - 2012 OMNIAN AMMATTIOPISTO KOULUTUSALA Tieto- ja tietoliikennetekniikka OPISKELIJA Hannu Junno OHJAAJA Jari Laurila VUOSI 2012 2 TIIVISTELMÄ Opinnäytetyöni
Ledien kytkeminen halpis virtalähteeseen
 Ledien kytkeminen halpis virtalähteeseen Ledien valovoiman kasvu ja samanaikaisen voimakkaan hintojen lasku on innostuttanut monia rakentamaan erilaisia tauluja. Tarkoitan niillä erilaista muoveista tehtyjä
Ledien kytkeminen halpis virtalähteeseen Ledien valovoiman kasvu ja samanaikaisen voimakkaan hintojen lasku on innostuttanut monia rakentamaan erilaisia tauluja. Tarkoitan niillä erilaista muoveista tehtyjä
NP-2T DL ohje. Oy Nylund-Group Ab
 NP-2T DL ohje Oy Nylund-Group Ab 5.10.2018 NP-2T DL Ominaisuudet: Ohjaa DALI-valaisimia broadcastkomennoin Ei vaadi ohjelmointia Sisäänrakennettu tehonsyöttö DALIväylälle Dynaaminen valaistuksenohjaus
NP-2T DL ohje Oy Nylund-Group Ab 5.10.2018 NP-2T DL Ominaisuudet: Ohjaa DALI-valaisimia broadcastkomennoin Ei vaadi ohjelmointia Sisäänrakennettu tehonsyöttö DALIväylälle Dynaaminen valaistuksenohjaus
Moottorin kierrosnopeus Tämän harjoituksen jälkeen:
 Moottorin kierrosnopeus Tämän harjoituksen jälkeen: osaat määrittää moottorin kierrosnopeuden pulssianturin ja Counter-sisääntulon avulla, osaat siirtää manuaalisesti mittaustiedoston LabVIEW:sta MATLABiin,
Moottorin kierrosnopeus Tämän harjoituksen jälkeen: osaat määrittää moottorin kierrosnopeuden pulssianturin ja Counter-sisääntulon avulla, osaat siirtää manuaalisesti mittaustiedoston LabVIEW:sta MATLABiin,
1 Muutokset piirilevylle
 1 Muutokset piirilevylle Seuraavat muutokset täytyvät olla piirilevylle tehtynä, jotta tätä käyttöohjetta voidaan käyttää. Jumppereiden JP5, JP6, JP7, sekä JP8 ja C201 väliltä puuttuvat signaalivedot on
1 Muutokset piirilevylle Seuraavat muutokset täytyvät olla piirilevylle tehtynä, jotta tätä käyttöohjetta voidaan käyttää. Jumppereiden JP5, JP6, JP7, sekä JP8 ja C201 väliltä puuttuvat signaalivedot on
TEHTÄVÄT KYTKENTÄKAAVIO
 TEHTÄÄT KYTKENTÄKIO 1. a) Mitkä kytkentäkaavion hehkulampuista hehkuvat? b) Kuinka monta eri kulkureittiä sähkövirralla on pariston plusnavalta miinusnavalle? 2. Piirrä sähkölaitteen tai komponentin piirrosmerkki.
TEHTÄÄT KYTKENTÄKIO 1. a) Mitkä kytkentäkaavion hehkulampuista hehkuvat? b) Kuinka monta eri kulkureittiä sähkövirralla on pariston plusnavalta miinusnavalle? 2. Piirrä sähkölaitteen tai komponentin piirrosmerkki.
1. Tasavirta. Virtapiirin komponenttien piirrosmerkit. Virtapiiriä havainnollistetaan kytkentäkaaviolla
 Fy3: Sähkö 1. Tasavirta Virtapiirin komponenttien piirrosmerkit Virtapiiriä havainnollistetaan kytkentäkaaviolla Sähkövirta I Sähkövirran suunta on valittu jännitelähteen plusnavasta miinusnapaan (elektronit
Fy3: Sähkö 1. Tasavirta Virtapiirin komponenttien piirrosmerkit Virtapiiriä havainnollistetaan kytkentäkaaviolla Sähkövirta I Sähkövirran suunta on valittu jännitelähteen plusnavasta miinusnapaan (elektronit
Alkuarvot ja tyyppimuunnokset (1/5) Alkuarvot ja tyyppimuunnokset (2/5) Alkuarvot ja tyyppimuunnokset (3/5)
 Alkuarvot ja tyyppimuunnokset (2/5) Alkuarvot ja tyyppimuunnokset (3/5)") Alkuarvot ja tyyppimuunnokset (1/5) Aiemmin olemme jo antaneet muuttujille alkuarvoja, esimerkiksi: int luku = 123; Alkuarvon on oltava muuttujan tietotyypin mukainen, esimerkiksi int-muuttujilla kokonaisluku,
Alkuarvot ja tyyppimuunnokset (1/5) Aiemmin olemme jo antaneet muuttujille alkuarvoja, esimerkiksi: int luku = 123; Alkuarvon on oltava muuttujan tietotyypin mukainen, esimerkiksi int-muuttujilla kokonaisluku,
Tehtävään on varattu aikaa 8:30 10:00. Seuraavaan tehtävään saat siirtyä aiemminkin. Välipalatarjoilu työpisteisiin 10:00
 LUE KOKO OHJE HUOLELLA LÄPI ENNEN KUIN ALOITAT!!! Tehtävä 1a Tehtävään on varattu aikaa 8:30 10:00. Seuraavaan tehtävään saat siirtyä aiemminkin. Välipalatarjoilu työpisteisiin 10:00 MITTAUSMODULIN KOKOAMINEN
LUE KOKO OHJE HUOLELLA LÄPI ENNEN KUIN ALOITAT!!! Tehtävä 1a Tehtävään on varattu aikaa 8:30 10:00. Seuraavaan tehtävään saat siirtyä aiemminkin. Välipalatarjoilu työpisteisiin 10:00 MITTAUSMODULIN KOKOAMINEN
Arduino ja perusteita
 Arduino ja perusteita Kimmo Silvonen (X) Pajan ohjeelliset aukioloajat III periodilla Pajalla tehdään Arduino-harjoituksia ja projektia! Ma klo 12 17 Ti klo 14 16 Ke klo 12 16 To klo 12 17 Pe klo 10 15
Arduino ja perusteita Kimmo Silvonen (X) Pajan ohjeelliset aukioloajat III periodilla Pajalla tehdään Arduino-harjoituksia ja projektia! Ma klo 12 17 Ti klo 14 16 Ke klo 12 16 To klo 12 17 Pe klo 10 15
Sähköpajan elektroniikkaa
 Sähköpajan elektroniikkaa Kimmo Silvonen (X) "Virtalähde", teholähde, verkkolaite (wall-wart) Elektroniikkapiirit vaativat toimiakseen käyttöjännitteen. Paristot noin 1,5 V tai 3 V / kenno Ladattavat NiMH-akut
Sähköpajan elektroniikkaa Kimmo Silvonen (X) "Virtalähde", teholähde, verkkolaite (wall-wart) Elektroniikkapiirit vaativat toimiakseen käyttöjännitteen. Paristot noin 1,5 V tai 3 V / kenno Ladattavat NiMH-akut
HF1 laitteen käyttöönotto ja asetukset
 HF1 laitteen käyttöönotto ja asetukset Laitteen kytkentä 1. Kytke laitteeseen käyttöjännite 12V. Sulakkeelle menevään punaiseen johtoon kytketään +12V. Normaalissa odotustilassa laitteen virrankulutus
HF1 laitteen käyttöönotto ja asetukset Laitteen kytkentä 1. Kytke laitteeseen käyttöjännite 12V. Sulakkeelle menevään punaiseen johtoon kytketään +12V. Normaalissa odotustilassa laitteen virrankulutus
Fy06 Koe 20.5.2015 Kuopion Lyseon lukio (KK) 1/7
 1/7") Fy06 Koe 0.5.015 Kuopion Lyseon lukio (KK) 1/7 alitse kolme tehtävää. 6p/tehtävä. 1. Mitä mieltä olet seuraavista väitteistä. Perustele lyhyesti ovatko väitteet totta vai tarua. a. irtapiirin hehkulamput
Fy06 Koe 0.5.015 Kuopion Lyseon lukio (KK) 1/7 alitse kolme tehtävää. 6p/tehtävä. 1. Mitä mieltä olet seuraavista väitteistä. Perustele lyhyesti ovatko väitteet totta vai tarua. a. irtapiirin hehkulamput
Arduino ohjelmistokehitys
 Arduino ohjelmistokehitys http://www.arduino.cc/ jak Sisältö Mikä on Arduino? Ohjelmistonkehitysympäristö (Arduino IDE) Ohjelmointikieli Esimerkkejä Lähteitä Arduino -ohjelmistokehitys/ jak 2 Mikä on Arduino?
Arduino ohjelmistokehitys http://www.arduino.cc/ jak Sisältö Mikä on Arduino? Ohjelmistonkehitysympäristö (Arduino IDE) Ohjelmointikieli Esimerkkejä Lähteitä Arduino -ohjelmistokehitys/ jak 2 Mikä on Arduino?
Pynnönen 1.5.2000. Opiskelija: Tarkastaja: Arvio:
 AMTEK 1/7 Opintokokonaisuus : Jakso: Harjoitustyö: 3 SÄHKÖ Pvm : Opiskelija: Tarkastaja: Arvio: Tavoite: Välineet: Opiskelija oppii ymmärtämään kolmivaihejärjestelmän vaihe- ja pääjännitteiden suuruudet
AMTEK 1/7 Opintokokonaisuus : Jakso: Harjoitustyö: 3 SÄHKÖ Pvm : Opiskelija: Tarkastaja: Arvio: Tavoite: Välineet: Opiskelija oppii ymmärtämään kolmivaihejärjestelmän vaihe- ja pääjännitteiden suuruudet
Lataussäädin 12/24V 10A. Käyttöohje
 Lataussäädin 12/24V 10A Käyttöohje 1 Yleistä Lataussäätimessä on näyttö ja sen latausmenetelmä on 3-vaiheinen PWM lataus. Siinä on myös kaksi USB liitintä pienten laitteiden lataamiseen. 2 Kytkentäkaavio
Lataussäädin 12/24V 10A Käyttöohje 1 Yleistä Lataussäätimessä on näyttö ja sen latausmenetelmä on 3-vaiheinen PWM lataus. Siinä on myös kaksi USB liitintä pienten laitteiden lataamiseen. 2 Kytkentäkaavio
KÄYTTÖOHJE JÄNNITTEENKOESTIN BT-69. v 1.0
 KÄYTTÖOHJE JÄNNITTEENKOESTIN BT-69 v 1.0 S&A MATINTUPA - WWW.MITTARIT.COM - 2009 1 1) 2/4mm testimittapäät (4mm mittapäät irroitettavissa) 2) Punainen mittapää, ( + / L ) kaikissa toiminnoissa 3) Musta
KÄYTTÖOHJE JÄNNITTEENKOESTIN BT-69 v 1.0 S&A MATINTUPA - WWW.MITTARIT.COM - 2009 1 1) 2/4mm testimittapäät (4mm mittapäät irroitettavissa) 2) Punainen mittapää, ( + / L ) kaikissa toiminnoissa 3) Musta
SÄHKÖ KÄSITTEENÄ. Yleisnimitys suurelle joukolle ilmiöitä ja käsitteitä:
 FY6 SÄHKÖ Tavoitteet Kurssin tavoitteena on, että opiskelija ymmärtää sähköön liittyviä peruskäsitteitä, tutustuu mittaustekniikkaan osaa tehdä sähköopin perusmittauksia sekä rakentaa ja tutkia yksinkertaisia
FY6 SÄHKÖ Tavoitteet Kurssin tavoitteena on, että opiskelija ymmärtää sähköön liittyviä peruskäsitteitä, tutustuu mittaustekniikkaan osaa tehdä sähköopin perusmittauksia sekä rakentaa ja tutkia yksinkertaisia
Taitaja semifinaali 2010, Iisalmi Jääkaapin ovihälytin
 Taitaja semifinaali 2010, Iisalmi Jääkaapin ovihälytin Ohjelmointitehtävänä on laatia ohjelma jääkaapin ovihälyttimelle. Hälytin toimii 3 V litium paristolla ja se sijoitetaan jääkaapin sisälle. Hälyttimen
Taitaja semifinaali 2010, Iisalmi Jääkaapin ovihälytin Ohjelmointitehtävänä on laatia ohjelma jääkaapin ovihälyttimelle. Hälytin toimii 3 V litium paristolla ja se sijoitetaan jääkaapin sisälle. Hälyttimen
Kauko-ohjauslaite GSM rele 2011 v 24.10.2010
 Kauko-ohjauslaite GSM rele 2011 v 24.10.2010 Gsmreleen päätoiminnat Etälaiteiden kauko-ohjaus vanhan GSM-puhelimen avulla Laitteessa on neljä releettä ja kaksi lisäohjausta. Yhteensä kuusi ohjausta. Releiden
Kauko-ohjauslaite GSM rele 2011 v 24.10.2010 Gsmreleen päätoiminnat Etälaiteiden kauko-ohjaus vanhan GSM-puhelimen avulla Laitteessa on neljä releettä ja kaksi lisäohjausta. Yhteensä kuusi ohjausta. Releiden
OPERAATIOVAHVISTIMET 2. Operaatiovahvistimen ominaisuuksia
 KAJAANIN AMMATTIKORKEAKOULU Tekniikan ja liikenteen ala TYÖ 11 ELEKTRONIIKAN LABORAATIOT H.Honkanen OPERAATIOVAHVISTIMET 2. Operaatiovahvistimen ominaisuuksia TYÖN TAVOITE Tutustua operaatiovahvistinkytkentään
KAJAANIN AMMATTIKORKEAKOULU Tekniikan ja liikenteen ala TYÖ 11 ELEKTRONIIKAN LABORAATIOT H.Honkanen OPERAATIOVAHVISTIMET 2. Operaatiovahvistimen ominaisuuksia TYÖN TAVOITE Tutustua operaatiovahvistinkytkentään
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 2.3.2009 T-106.1208 Ohjelmoinnin perusteet Y 2.3.2009 1 / 28 Puhelinluettelo, koodi def lue_puhelinnumerot(): print "Anna lisattavat nimet ja numerot." print
Ohjelmoinnin perusteet Y Python T-106.1208 2.3.2009 T-106.1208 Ohjelmoinnin perusteet Y 2.3.2009 1 / 28 Puhelinluettelo, koodi def lue_puhelinnumerot(): print "Anna lisattavat nimet ja numerot." print
EVTEK/ Antti Piironen & Pekka Valtonen 1/6 TM01S/ Elektroniikan komponentit ja järjestelmät Laboraatiot, Syksy 2003
 EVTEK/ Antti Piironen & Pekka Valtonen 1/6 TM01S/ Elektroniikan komponentit ja järjestelmät Laboraatiot, Syksy 2003 LABORATORIOTÖIDEN OHJEET (Mukaillen työkirjaa "Teknillisten oppilaitosten Elektroniikka";
EVTEK/ Antti Piironen & Pekka Valtonen 1/6 TM01S/ Elektroniikan komponentit ja järjestelmät Laboraatiot, Syksy 2003 LABORATORIOTÖIDEN OHJEET (Mukaillen työkirjaa "Teknillisten oppilaitosten Elektroniikka";
Harjoitustehtäviä kokeeseen: Sähköoppi ja magnetismi
 Harjoitustehtäviä kokeeseen: Sähköoppi ja magnetismi 3. Selitä: a. Suljettu virtapiiri Suljettu virtapiiri on sähkövirran reitti, jonka muodostavat johdot, paristot ja komponentit. Suljetussa virtapiirissä
Harjoitustehtäviä kokeeseen: Sähköoppi ja magnetismi 3. Selitä: a. Suljettu virtapiiri Suljettu virtapiiri on sähkövirran reitti, jonka muodostavat johdot, paristot ja komponentit. Suljetussa virtapiirissä
Sähköopin mittauksia 1
 Sähköopin mittauksia 1 Sisällysluettelo Pikaohje LoggerPro mittausohjelma... 2 Pikaohje sähköopin anturit... 3 Kytkentäalusta... 4 Sähkövirran perusominaisuudet... 6 Jännitteen perusominaisuudet... 8 Virtapiirin
Sähköopin mittauksia 1 Sisällysluettelo Pikaohje LoggerPro mittausohjelma... 2 Pikaohje sähköopin anturit... 3 Kytkentäalusta... 4 Sähkövirran perusominaisuudet... 6 Jännitteen perusominaisuudet... 8 Virtapiirin
AALTO-VALVONTALAITE TST5102
 AALTO-VALVONTALAITE TST5102 KONFIGUROINTI- JA KÄYTTÖOPAS SISÄLLYSLUETTELO 1. JOHDANTO... 3 2. VALVONTALAITTEEN ASENNUS... 3 3. VALVONTALAITTEEN KONFIGUROINTI HYPERTERMINAL-OHJELMALLA... 3 3.1 Valaisimien
AALTO-VALVONTALAITE TST5102 KONFIGUROINTI- JA KÄYTTÖOPAS SISÄLLYSLUETTELO 1. JOHDANTO... 3 2. VALVONTALAITTEEN ASENNUS... 3 3. VALVONTALAITTEEN KONFIGUROINTI HYPERTERMINAL-OHJELMALLA... 3 3.1 Valaisimien
Dynatel 2210E kaapelinhakulaite
 Dynatel 2210E kaapelinhakulaite Syyskuu 2001 KÄYTTÖOHJE Yleistä 3M Dynatel 2210E kaapelinhakulaite koostuu lähettimestä, vastaanottimesta ja tarvittavista johdoista. Laitteella voidaan paikantaa kaapeleita
Dynatel 2210E kaapelinhakulaite Syyskuu 2001 KÄYTTÖOHJE Yleistä 3M Dynatel 2210E kaapelinhakulaite koostuu lähettimestä, vastaanottimesta ja tarvittavista johdoista. Laitteella voidaan paikantaa kaapeleita
Näppäimistö CT 1000. Käyttäjäopas. Global Safety & Security Solutions Oy E-mail: info@globalsafety.fi. CT1000v.5
 Näppäimistö CT 1000 Käyttäjäopas CT1000v.5 Global Safety & Security Solutions Oy E-mail: info@globalsafety.fi Sivu 2 CT 1000 Rajoitukset Kaikki oikeudet tähän ohjekirjaan ovat Global Safety & Security
Näppäimistö CT 1000 Käyttäjäopas CT1000v.5 Global Safety & Security Solutions Oy E-mail: info@globalsafety.fi Sivu 2 CT 1000 Rajoitukset Kaikki oikeudet tähän ohjekirjaan ovat Global Safety & Security
11. Javan toistorakenteet 11.1
 11. Javan toistorakenteet 11.1 Sisällys Laskuri- ja lippumuuttujat. Sisäkkäiset silmukat. Tyypillisiä ohjelmointivirheitä: Silmukan rajat asetettu kierroksen verran väärin. Ikuinen silmukka. Silmukoinnin
11. Javan toistorakenteet 11.1 Sisällys Laskuri- ja lippumuuttujat. Sisäkkäiset silmukat. Tyypillisiä ohjelmointivirheitä: Silmukan rajat asetettu kierroksen verran väärin. Ikuinen silmukka. Silmukoinnin
7. Resistanssi ja Ohmin laki
 Nimi: LK: SÄHKÖ-OPPI Tarmo Partanen Teoria (Muista hyödyntää sanastoa) 1. Millä nimellä kuvataan sähköisen komponentin (laitteen, johtimen) sähkön kulkua vastustavaa ominaisuutta? 2. Miten resistanssi
Nimi: LK: SÄHKÖ-OPPI Tarmo Partanen Teoria (Muista hyödyntää sanastoa) 1. Millä nimellä kuvataan sähköisen komponentin (laitteen, johtimen) sähkön kulkua vastustavaa ominaisuutta? 2. Miten resistanssi
Paikantavan turvapuhelimen käyttöohje
 Paikantavan turvapuhelimen käyttöohje Stella Turvapuhelin ja Hoiva Oy Tämä ohje kertoo miten paikantavaa turvapuhelinta käytetään Stella Turvapuhelin ja Hoiva Oy Mannerheimintie 164 00300 Helsinki Sisällysluettelo
Paikantavan turvapuhelimen käyttöohje Stella Turvapuhelin ja Hoiva Oy Tämä ohje kertoo miten paikantavaa turvapuhelinta käytetään Stella Turvapuhelin ja Hoiva Oy Mannerheimintie 164 00300 Helsinki Sisällysluettelo
Eye Pal Solo. Käyttöohje
 Eye Pal Solo Käyttöohje 1 Eye Pal Solon käyttöönotto Eye Pal Solon pakkauksessa tulee kolme osaa: 1. Peruslaite, joka toimii varsinaisena lukijana ja jonka etureunassa on laitteen ohjainpainikkeet. 2.
Eye Pal Solo Käyttöohje 1 Eye Pal Solon käyttöönotto Eye Pal Solon pakkauksessa tulee kolme osaa: 1. Peruslaite, joka toimii varsinaisena lukijana ja jonka etureunassa on laitteen ohjainpainikkeet. 2.
Omavalmisteinen 3d-printteri Arduino Megan ohjaamana. Sisällysluettelo
 Omavalmisteinen 3d-printteri Arduino Megan ohjaamana Sisällysluettelo 1. 3d-printtauksen kerrosmainen toiminta-ajatus 2. Runkorakenne 3. Kytkentäkaavio ja kytkennät 4. Cura 3.3, ohjausohjelma 1. 3d-printtauksen
Omavalmisteinen 3d-printteri Arduino Megan ohjaamana Sisällysluettelo 1. 3d-printtauksen kerrosmainen toiminta-ajatus 2. Runkorakenne 3. Kytkentäkaavio ja kytkennät 4. Cura 3.3, ohjausohjelma 1. 3d-printtauksen
Arduinon ohjelmointi. Sami-Petteri Pukkila. 1. helmikuuta 2016
 Sami-Petteri Pukkila sami-petteri.pukkila@aalto.fi 1. helmikuuta 2016 Ohjelman rakenne # include / / Matemaattisia funktioita const i n t ledpin = 13; / / Merkkivalo i n t sensorpin = 4; / /
Sami-Petteri Pukkila sami-petteri.pukkila@aalto.fi 1. helmikuuta 2016 Ohjelman rakenne # include / / Matemaattisia funktioita const i n t ledpin = 13; / / Merkkivalo i n t sensorpin = 4; / /
GSM PUHEVIESTI & SMS HÄLYTYKSENSIIRTOLAITE
 ZEUS4-VD GSM PUHEVIESTI & SMS HÄLYTYKSENSIIRTOLAITE V 1.2 ASENNUS, TOIMINTA JA OHJELMOINTI MAAHANTUOJA: FIN- ALERT ELECTRONICS OY WWW.FINALERT.FI PERUSTIEDOT ZEUS4 - VD on GSM hälytyksensiirtolaite joka
ZEUS4-VD GSM PUHEVIESTI & SMS HÄLYTYKSENSIIRTOLAITE V 1.2 ASENNUS, TOIMINTA JA OHJELMOINTI MAAHANTUOJA: FIN- ALERT ELECTRONICS OY WWW.FINALERT.FI PERUSTIEDOT ZEUS4 - VD on GSM hälytyksensiirtolaite joka
NP-3T DL ohje. Nylund-Group
 NP-3T DL ohje Nylund-Group 16.11.2018 NP-3T DL Ohjaa DALI-valaisimia broadcastkomennoin Ei vaadi ohjelmointia Sisäänrakennettu tehonsyöttö DALIväylälle Dynaaminen valaistuksenohjaus Käyttöjännite 230 V
NP-3T DL ohje Nylund-Group 16.11.2018 NP-3T DL Ohjaa DALI-valaisimia broadcastkomennoin Ei vaadi ohjelmointia Sisäänrakennettu tehonsyöttö DALIväylälle Dynaaminen valaistuksenohjaus Käyttöjännite 230 V
Taitaja2010, Iisalmi Suunnittelutehtävä, teoria osa
 Taitaja2010, Iisalmi Suunnittelutehtävä, teoria osa Nimi: Pisteet: Koulu: Lue liitteenä jaettu artikkeli Solar Lamp (Elector Electronics 9/2005) ja selvitä itsellesi laitteen toiminta. Tätä artikkelia
Taitaja2010, Iisalmi Suunnittelutehtävä, teoria osa Nimi: Pisteet: Koulu: Lue liitteenä jaettu artikkeli Solar Lamp (Elector Electronics 9/2005) ja selvitä itsellesi laitteen toiminta. Tätä artikkelia
Etälukija PR 1000. Käyttäjäopas. Global Safety & Security Solutions Oy E-mail: info@globalsafety.fi. PR1000v.2
 Etälukija PR 1000 Käyttäjäopas PR1000v.2 Global Safety & Security Solutions Oy E-mail: info@globalsafety.fi Sivu 2 PR 1000 Rajoitukset Kaikki oikeudet tähän ohjekirjaan ovat Global Safety & Security Solutions
Etälukija PR 1000 Käyttäjäopas PR1000v.2 Global Safety & Security Solutions Oy E-mail: info@globalsafety.fi Sivu 2 PR 1000 Rajoitukset Kaikki oikeudet tähän ohjekirjaan ovat Global Safety & Security Solutions
Oletus Sinulla on Raspin Geany-IDE konfiguroituna toimimaan SSH-etäkäytössä.
 Python-koodaus: Eka GPIO-ohjelma, LED vilkutus PUNOMO NETWORKS OY 5.8.2016 pva Oletus Sinulla on Raspin Geany-IDE konfiguroituna toimimaan SSH-etäkäytössä. Tämä on Punomon Python koodikoulun ensimmäinen
Python-koodaus: Eka GPIO-ohjelma, LED vilkutus PUNOMO NETWORKS OY 5.8.2016 pva Oletus Sinulla on Raspin Geany-IDE konfiguroituna toimimaan SSH-etäkäytössä. Tämä on Punomon Python koodikoulun ensimmäinen
Anturit ja Arduino. ELEC-A4010 Sähköpaja Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka
 Anturit ja Arduino Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka Anturit ja Arduino Luennon sisältö 1. Taustaa 2. Antureiden ominaisuudet 3. AD-muunnos 4. Antureiden lukeminen Arduinolla
Anturit ja Arduino Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka Anturit ja Arduino Luennon sisältö 1. Taustaa 2. Antureiden ominaisuudet 3. AD-muunnos 4. Antureiden lukeminen Arduinolla
Harjoitustyö: virtuaalikone
 Harjoitustyö: virtuaalikone Toteuta alla kuvattu virtuaalikone yksinkertaiselle olio-orientoituneelle skriptauskielelle. Paketissa on testaamista varten mukana kaksi lyhyttä ohjelmaa. Ohjeita Noudata ohjelman
Harjoitustyö: virtuaalikone Toteuta alla kuvattu virtuaalikone yksinkertaiselle olio-orientoituneelle skriptauskielelle. Paketissa on testaamista varten mukana kaksi lyhyttä ohjelmaa. Ohjeita Noudata ohjelman
Koottu lause; { ja } -merkkien väliin kirjoitetut lauseet muodostavat lohkon, jonka sisällä lauseet suoritetaan peräkkäin.
 2. Ohjausrakenteet Ohjausrakenteiden avulla ohjataan ohjelman suoritusta. peräkkäisyys valinta toisto Koottu lause; { ja } -merkkien väliin kirjoitetut lauseet muodostavat lohkon, jonka sisällä lauseet
2. Ohjausrakenteet Ohjausrakenteiden avulla ohjataan ohjelman suoritusta. peräkkäisyys valinta toisto Koottu lause; { ja } -merkkien väliin kirjoitetut lauseet muodostavat lohkon, jonka sisällä lauseet
Elektroniikka. Mitä sähkö on. Käsitteistöä
 Elektroniikka Mitä sähkö on Sähkö on elektronien liikettä atomista toiseen. Negatiivisesti varautuneet elektronit siirtyvät atomista toiseen. Tätä kutsutaan sähkövirraksi Sähkövirrasta puhuttaessa on sovittu,
Elektroniikka Mitä sähkö on Sähkö on elektronien liikettä atomista toiseen. Negatiivisesti varautuneet elektronit siirtyvät atomista toiseen. Tätä kutsutaan sähkövirraksi Sähkövirrasta puhuttaessa on sovittu,
Pynnönen 1.5.2000. Opiskelija: Tarkastaja: Arvio:
 EAOL 1/6 Opintokokonaisuus : Jakso: Harjoitustyö: 3 SÄHKÖ Pvm : Opiskelija: Tarkastaja: Arvio: Tavoite: Välineet: Opiskelija oppii ymmärtämään kolmivaihejärjestelmän vaihe- ja pääjännitteiden suuruudet
EAOL 1/6 Opintokokonaisuus : Jakso: Harjoitustyö: 3 SÄHKÖ Pvm : Opiskelija: Tarkastaja: Arvio: Tavoite: Välineet: Opiskelija oppii ymmärtämään kolmivaihejärjestelmän vaihe- ja pääjännitteiden suuruudet
IDL - proseduurit. ATK tähtitieteessä. IDL - proseduurit
 IDL - proseduurit 25. huhtikuuta 2017 Viimeksi käsiteltiin IDL:n interaktiivista käyttöä, mutta tämä on hyvin kömpelöä monimutkaisempia asioita tehtäessä. IDL:llä on mahdollista tehdä ns. proseduuri-tiedostoja,
IDL - proseduurit 25. huhtikuuta 2017 Viimeksi käsiteltiin IDL:n interaktiivista käyttöä, mutta tämä on hyvin kömpelöä monimutkaisempia asioita tehtäessä. IDL:llä on mahdollista tehdä ns. proseduuri-tiedostoja,
12. Javan toistorakenteet 12.1
 12. Javan toistorakenteet 12.1 Sisällys Yleistä toistorakenteista. Laskurimuuttujat. While-, do-while- ja for-lauseet. Laskuri- ja lippumuuttujat. Tyypillisiä ohjelmointivirheitä. Silmukan rajat asetettu
12. Javan toistorakenteet 12.1 Sisällys Yleistä toistorakenteista. Laskurimuuttujat. While-, do-while- ja for-lauseet. Laskuri- ja lippumuuttujat. Tyypillisiä ohjelmointivirheitä. Silmukan rajat asetettu
Ohjelmointitaito (ict1td002, 12 op) Kevät 2008. 1. Java-ohjelmoinnin alkeita. Tietokoneohjelma. Raine Kauppinen raine.kauppinen@haaga-helia.
 Kevät 2008. 1. Java-ohjelmoinnin alkeita. Tietokoneohjelma. Raine Kauppinen raine.kauppinen@haaga-helia.") Ohjelmointitaito (ict1td002, 12 op) Kevät 2008 Raine Kauppinen raine.kauppinen@haaga-helia.fi 1. Java-ohjelmoinnin alkeita Tietokoneohjelma Java-kieli ja Eclipse-ympäristö Java-ohjelma ja ohjelmaluokka
Ohjelmointitaito (ict1td002, 12 op) Kevät 2008 Raine Kauppinen raine.kauppinen@haaga-helia.fi 1. Java-ohjelmoinnin alkeita Tietokoneohjelma Java-kieli ja Eclipse-ympäristö Java-ohjelma ja ohjelmaluokka
Hyvä Webaston käyttäjä! Tämä käyttöohje on tarkoitettu valtuutetun asentamon antaman käytönopastuksen
 Käyttö- ja huolto-ohje T80 advanced FIN Yleistä Hyvä Webaston käyttäjä! Tämä käyttöohje on tarkoitettu valtuutetun asentamon antaman käytönopastuksen tueksi.. Tässä käyttöohjeessa haluamme vielä luoda
Käyttö- ja huolto-ohje T80 advanced FIN Yleistä Hyvä Webaston käyttäjä! Tämä käyttöohje on tarkoitettu valtuutetun asentamon antaman käytönopastuksen tueksi.. Tässä käyttöohjeessa haluamme vielä luoda
ATK tähtitieteessä. Osa 3 - IDL proseduurit ja rakenteet. 18. syyskuuta 2014
 18. syyskuuta 2014 IDL - proseduurit Viimeksi käsiteltiin IDL:n interaktiivista käyttöä, mutta tämä on hyvin kömpelöä monimutkaisempia asioita tehtäessä. IDL:llä on mahdollista tehdä ns. proseduuri-tiedostoja,
18. syyskuuta 2014 IDL - proseduurit Viimeksi käsiteltiin IDL:n interaktiivista käyttöä, mutta tämä on hyvin kömpelöä monimutkaisempia asioita tehtäessä. IDL:llä on mahdollista tehdä ns. proseduuri-tiedostoja,
Finnish. Osien nimet. Tarkistuslaiteyksikkö. Sähkökaapelin tarkistuslaite. Vaihtokytkimen tarkistuslaite SM-EC79 HAKEMISTO
 SM-EC79 HAKEMISTO Tarkistuslaitteen käyttö Ongelman sijainnin määritys tarkistuslaitteella 136 Ongelma etuvaihtajassa tai takavaihtajassa 137 Ongelma SM-EW79A + ST-7970:n toiminnassa 139 SM-EW79A tarkistus
SM-EC79 HAKEMISTO Tarkistuslaitteen käyttö Ongelman sijainnin määritys tarkistuslaitteella 136 Ongelma etuvaihtajassa tai takavaihtajassa 137 Ongelma SM-EW79A + ST-7970:n toiminnassa 139 SM-EW79A tarkistus
MIKROAALTOMITTAUKSET 1
 MIKROAALTOMITTAUKSET 1 1. TYÖN TARKOITUS Tässä harjoituksessa tutkit virran ja jännitteen käyttäytymistä gunn-oskillaattorissa. Piirrät jännitteen ja virran avulla gunn-oskillaattorin toimintakäyrän. 2.
MIKROAALTOMITTAUKSET 1 1. TYÖN TARKOITUS Tässä harjoituksessa tutkit virran ja jännitteen käyttäytymistä gunn-oskillaattorissa. Piirrät jännitteen ja virran avulla gunn-oskillaattorin toimintakäyrän. 2.
Kondensaattorin läpi kulkeva virta saadaan derivoimalla yhtälöä (2), jolloin saadaan
, jolloin saadaan") VAIHTOVIRTAPIIRI 1 Johdanto Vaihtovirtapiirien käsittely perustuu kolmen peruskomponentin, vastuksen (resistanssi R), kelan (induktanssi L) ja kondensaattorin (kapasitanssi C) toimintaan. Tarkastellaan
VAIHTOVIRTAPIIRI 1 Johdanto Vaihtovirtapiirien käsittely perustuu kolmen peruskomponentin, vastuksen (resistanssi R), kelan (induktanssi L) ja kondensaattorin (kapasitanssi C) toimintaan. Tarkastellaan
1 Asentaminen. 2 Yleistä ja simuloinnin aloitus 12/2006 1.1.1
 1 Asentaminen...2 2 Yleistä ja simuloinnin aloitus...2 2.1 PI-säätimet...3 2.2 Trendit...4 3 Lämpölaitoksen ohjaus...5 4 Voimalan alkuarvojen muuttaminen...6 5 Tulostus...8 6 Mahdollisia ongelmia...8 6.1
1 Asentaminen...2 2 Yleistä ja simuloinnin aloitus...2 2.1 PI-säätimet...3 2.2 Trendit...4 3 Lämpölaitoksen ohjaus...5 4 Voimalan alkuarvojen muuttaminen...6 5 Tulostus...8 6 Mahdollisia ongelmia...8 6.1
Java-kielen perusteet
 Java-kielen perusteet Tunnus, varattu sana, kommentti Muuttuja, alkeistietotyyppi, merkkijono, literaalivakio, nimetty vakio Tiedon merkkipohjainen tulostaminen 1 Tunnus Java tunnus Java-kirjain Java-numero
Java-kielen perusteet Tunnus, varattu sana, kommentti Muuttuja, alkeistietotyyppi, merkkijono, literaalivakio, nimetty vakio Tiedon merkkipohjainen tulostaminen 1 Tunnus Java tunnus Java-kirjain Java-numero
Scratch ohjeita. Perusteet
 Perusteet Scratch ohjeita Scratch on graafinen ohjelmointiympäristö koodauksen opetteluun. Se soveltuu hyvin alakouluista yläkouluunkin asti, sillä Scratchin käyttömahdollisuudet ovat monipuoliset. Scratch
Perusteet Scratch ohjeita Scratch on graafinen ohjelmointiympäristö koodauksen opetteluun. Se soveltuu hyvin alakouluista yläkouluunkin asti, sillä Scratchin käyttömahdollisuudet ovat monipuoliset. Scratch
Lego Mindstorms NXT. OPH oppimisympäristöjen kehittämishanke 2011-2013. (C) 2012 Oppimiskeskus Innokas! All Rights Reserved 1
 2012 Oppimiskeskus Innokas! All Rights Reserved 1") Lego Mindstorms NXT OPH oppimisympäristöjen kehittämishanke 2011-2013 (C) 2012 Oppimiskeskus Innokas! All Rights Reserved 1 Anturi- ja moottoriportit A B C 1 2 3 4 (C) 2012 Oppimiskeskus Innokas! All Rights
Lego Mindstorms NXT OPH oppimisympäristöjen kehittämishanke 2011-2013 (C) 2012 Oppimiskeskus Innokas! All Rights Reserved 1 Anturi- ja moottoriportit A B C 1 2 3 4 (C) 2012 Oppimiskeskus Innokas! All Rights
12. Javan toistorakenteet 12.1
 12. Javan toistorakenteet 12.1 Sisällys Yleistä toistorakenteista. Laskurimuuttujat. While-, do-while- ja for-lauseet. Laskuri- ja lippumuuttujat. Tyypillisiä ohjelmointivirheitä. Silmukan rajat asetettu
12. Javan toistorakenteet 12.1 Sisällys Yleistä toistorakenteista. Laskurimuuttujat. While-, do-while- ja for-lauseet. Laskuri- ja lippumuuttujat. Tyypillisiä ohjelmointivirheitä. Silmukan rajat asetettu
Ohjelmoinnin peruskurssi Y1
 Ohjelmoinnin peruskurssi Y1 CSE-A1111 30.9.2015 CSE-A1111 Ohjelmoinnin peruskurssi Y1 30.9.2015 1 / 27 Mahdollisuus antaa luentopalautetta Goblinissa vasemmassa reunassa olevassa valikossa on valinta Luentopalaute.
Ohjelmoinnin peruskurssi Y1 CSE-A1111 30.9.2015 CSE-A1111 Ohjelmoinnin peruskurssi Y1 30.9.2015 1 / 27 Mahdollisuus antaa luentopalautetta Goblinissa vasemmassa reunassa olevassa valikossa on valinta Luentopalaute.
Kuva 1. Ohmin lain kytkentäkaavio. DC; 0 6 V.
 TYÖ 37. OHMIN LAKI Tehtävä Tutkitaan metallijohtimen päiden välille kytketyn jännitteen ja johtimessa kulkevan sähkövirran välistä riippuvuutta. Todennetaan kokeellisesti Ohmin laki. Välineet Tasajännitelähde
TYÖ 37. OHMIN LAKI Tehtävä Tutkitaan metallijohtimen päiden välille kytketyn jännitteen ja johtimessa kulkevan sähkövirran välistä riippuvuutta. Todennetaan kokeellisesti Ohmin laki. Välineet Tasajännitelähde
Harjoitustyön 2 aiheiden kuvaukset
 Sivu 1 (5) 1 Raitiovaunun oven avaamis- ja sulkemispiiri Raitiovaunun oven vieressä on matkustajan avauspainike. Kun vaunu on paikallaan, matkustajan avauspainikkeen painaminen antaa signaalin, joka avaa
Sivu 1 (5) 1 Raitiovaunun oven avaamis- ja sulkemispiiri Raitiovaunun oven vieressä on matkustajan avauspainike. Kun vaunu on paikallaan, matkustajan avauspainikkeen painaminen antaa signaalin, joka avaa
Luxomat PD4-M-TRIO-2DALI-1C-AP tai FP asennus ja säätöohje
 Luxomat PD4-M-TRIO-2DALI-1C-AP tai FP asennus ja säätöohje Niclas Nylund 13.4.2016 PD4-M-TRIO-2DALI/DSI-1C tunnistin Tunnistin on erityisesti koululuokkiin suunniteltu läsnäolotunnistin tunnistin. Tunnistin
Luxomat PD4-M-TRIO-2DALI-1C-AP tai FP asennus ja säätöohje Niclas Nylund 13.4.2016 PD4-M-TRIO-2DALI/DSI-1C tunnistin Tunnistin on erityisesti koululuokkiin suunniteltu läsnäolotunnistin tunnistin. Tunnistin
PROXIMITY /etälukijat CZ-EMM3 CZ-EMM4
 Kocom Finland Oy WWW.kocom.fi PROXIMITY /etälukijat CZ-EMM3 CZ-EMM4 cz-emm34_en 08/08 Etätunnisteiden lukijat CZ-EMM3 ja CZ-EMM4 joita kutsutaan myös lukupäiksi - ovat suuniteltu erilaisten passiivisten
Kocom Finland Oy WWW.kocom.fi PROXIMITY /etälukijat CZ-EMM3 CZ-EMM4 cz-emm34_en 08/08 Etätunnisteiden lukijat CZ-EMM3 ja CZ-EMM4 joita kutsutaan myös lukupäiksi - ovat suuniteltu erilaisten passiivisten
Ohjelmoitava magneettivastuksellinen kuntopyörä. LCD-Näyttö BC-81295
 Ohjelmoitava magneettivastuksellinen kuntopyörä LCD-Näyttö BC-81295 Yhteenveto Tämä on tarkoitettu ainoastaan ohjelmoitavaan magneettivastukselliseen kuntopyörään. Järjestelmään kuuluu kolme (3) osaa:
Ohjelmoitava magneettivastuksellinen kuntopyörä LCD-Näyttö BC-81295 Yhteenveto Tämä on tarkoitettu ainoastaan ohjelmoitavaan magneettivastukselliseen kuntopyörään. Järjestelmään kuuluu kolme (3) osaa:
Asennusohje. EasyLine GSM
 Asennusohje EasyLine GSM Laitteen kuvaus EasyLine GSM on puhelinlijasimulaattori, joka simuloi analogista PSTN linjaa GSM verkossa ja sitä voidaan käyttää ContactID protokollan lähettämiseen hälytinjärjestelmiltä.
Asennusohje EasyLine GSM Laitteen kuvaus EasyLine GSM on puhelinlijasimulaattori, joka simuloi analogista PSTN linjaa GSM verkossa ja sitä voidaan käyttää ContactID protokollan lähettämiseen hälytinjärjestelmiltä.
S14 09 Sisäpeltorobotti AS Automaatio ja systeemitekniikan projektityöt. Antti Kulpakko, Mikko Ikonen
 S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
Katso Opetus.tv:n video: Kirchhoffin 1. laki http://opetus.tv/fysiikka/fy6/kirchhoffin-lait/
 4.1 Kirchhoffin lait Katso Opetus.tv:n video: Kirchhoffin 1. laki http://opetus.tv/fysiikka/fy6/kirchhoffin-lait/ Katso Kimmo Koivunoron video: Kirchhoffin 2. laki http://www.youtube.com/watch?v=2ik5os2enos
4.1 Kirchhoffin lait Katso Opetus.tv:n video: Kirchhoffin 1. laki http://opetus.tv/fysiikka/fy6/kirchhoffin-lait/ Katso Kimmo Koivunoron video: Kirchhoffin 2. laki http://www.youtube.com/watch?v=2ik5os2enos
Ohjeistus Auditorion laitteiden käyttämiseksi.
 Ohjeistus Auditorion laitteiden käyttämiseksi. Jatkuu seuraavalla sivulla Huomioi ensimmäiseksi nämä asiat: Kuvassa näkyvissä liitinlaatikoissa tulisi olla kaikki johdot paikallaan. Mikäli jokin kuvassa
Ohjeistus Auditorion laitteiden käyttämiseksi. Jatkuu seuraavalla sivulla Huomioi ensimmäiseksi nämä asiat: Kuvassa näkyvissä liitinlaatikoissa tulisi olla kaikki johdot paikallaan. Mikäli jokin kuvassa
SÄHKÖTEKNIIKKA. NTUTAS13 Tasasähköpiirit Jussi Hurri kevät 2015
 SÄHKÖTEKNIIKKA NTTAS13 Tasasähköpiirit Jussi Hurri kevät 2015 1. PERSKÄSITTEITÄ 1.1. VIRTAPIIRI Virtapiiri on johtimista ja komponenteista tehty reitti, jossa sähkövirta kulkee. 2 Virtapiirissä on vähintään
SÄHKÖTEKNIIKKA NTTAS13 Tasasähköpiirit Jussi Hurri kevät 2015 1. PERSKÄSITTEITÄ 1.1. VIRTAPIIRI Virtapiiri on johtimista ja komponenteista tehty reitti, jossa sähkövirta kulkee. 2 Virtapiirissä on vähintään
Micro:bit. Käyttöohje. Innokas verkosto Petja Pyykkönen, Saimaan mediakeskus Käyttöohje / 2016 Innokas
 Micro:bit Käyttöohje Innokas verkosto Petja Pyykkönen, Saimaan mediakeskus 24.5.2017 Käyttöohje / 2016 Innokas Micro:bitin rakenne Micro:bitin etupuolelta löytyy 25 punaista LEDiä, jotka voidaan ohjelmoida
Micro:bit Käyttöohje Innokas verkosto Petja Pyykkönen, Saimaan mediakeskus 24.5.2017 Käyttöohje / 2016 Innokas Micro:bitin rakenne Micro:bitin etupuolelta löytyy 25 punaista LEDiä, jotka voidaan ohjelmoida
MrSmart 8-kanavainen lämpötilamittaus ja loggaus, digitoija ja talletusohjelma
 MrSmart 8-kanavainen lämpötilamittaus ja loggaus, digitoija ja talletusohjelma Kuva 1 MrSmart on digitointilaite PC:lle Yleistä MrSmart on sarjaliikenteellä toimiva sarjaliikennedigitoija. Laite mittaa
MrSmart 8-kanavainen lämpötilamittaus ja loggaus, digitoija ja talletusohjelma Kuva 1 MrSmart on digitointilaite PC:lle Yleistä MrSmart on sarjaliikenteellä toimiva sarjaliikennedigitoija. Laite mittaa
Elotec Ajax. Aloitus
 Elotec Ajax Aloitus Onnittelut uudelle Elotec Ajax järjestelmällesi! Tervetuloa uuden sukupolven hälytysjärjestelmän pariin. Uusi langaton teknologia mahdollistaa etäisyyksiä jopa 2000metriin saakka avoimissa
Elotec Ajax Aloitus Onnittelut uudelle Elotec Ajax järjestelmällesi! Tervetuloa uuden sukupolven hälytysjärjestelmän pariin. Uusi langaton teknologia mahdollistaa etäisyyksiä jopa 2000metriin saakka avoimissa
Kaksi yleismittaria, tehomittari, mittausalusta 5, muistiinpanot ja oppikirjat. P = U x I
 Pynnönen 1/3 SÄHKÖTEKNIIKKA Kurssi: Harjoitustyö : Tehon mittaaminen Pvm : Opiskelija: Tark. Arvio: Tavoite: Välineet: Harjoitustyön tehtyäsi osaat mitata ja arvioida vastukseen jäävän tehohäviön sähköisessä
Pynnönen 1/3 SÄHKÖTEKNIIKKA Kurssi: Harjoitustyö : Tehon mittaaminen Pvm : Opiskelija: Tark. Arvio: Tavoite: Välineet: Harjoitustyön tehtyäsi osaat mitata ja arvioida vastukseen jäävän tehohäviön sähköisessä
Tekniikka ja liikenne (5) Tietoliikennetekniikan laboratorio
 Tietoliikennetekniikan laboratorio") Tekniikka ja liikenne 4.4.2011 1 (5) Tietoliikennetekniikan laboratorio Työ 1 PCM-työ Työn tarkoitus Työssä tutustutaan pulssikoodimodulaation tekniseen toteutustapaan. Samalla nähdään, miten A/Dmuunnin
Tekniikka ja liikenne 4.4.2011 1 (5) Tietoliikennetekniikan laboratorio Työ 1 PCM-työ Työn tarkoitus Työssä tutustutaan pulssikoodimodulaation tekniseen toteutustapaan. Samalla nähdään, miten A/Dmuunnin