Käyttäjän ohjekirja. Simrad AP28 Autopilotti
|
|
|
- Tapio Leppänen
- 6 vuotta sitten
- Katselukertoja:
Transkriptio
1 Käyttäjän ohjekirja Simrad AP28 Autopilotti Suomi Sw A brand by Navico - Leader in Marine Electronics
2 A P 2 8 Dokumentti Käyttäjän ohjekirja Simrad AP28 Autopilotti Suomi no.: Tarkistus: Pvm: Huhtikuu 2008 B Sw.1.2 Tämän dokumentin alkuperäinen kieli on englanti. Niissä tapauksissa, joissa on jokin ristiriitaisuus käännetyn ja englanninkielisen version välillä, on englanninkielinen versio virallinen. Tämän julkaisun sisältö on parhaan tietomme mukaan ollut virheetöntä julkaisun mennessä painoon. Koska jatkuvasti parannamme tuotteitamme, pidätämme oikeuden tehdä milloin tahansa muutoksia tuotteeseen ja sen dokumentointiin. Päivitetyt ohjekirjat ovat vapaasti ladattavissa www-sivultamme Copyright 2008 by Navico Holding AS.
3 Tästä käsikirjasta Rev. A Ensimmäinen laitos Rev. B Follow up ohjaus mukana. Päivitetty autopilotin ohjelmistoversio 1.2 mukaan Tämä käsikirja on tarkoitettu Simrad AP28 autopilotin käyttäjän ohjekirjaksi ja huolto-oppaaksi. Autopilotti on monimutkainen hallintajärjestelmä. Varaa kunnolla aikaa tämän käsikirjan lukemiseen, jotta ymmärtäisit miten laite ja sen komponentit toimivat sekä niiden keskinäisen vuorovaikutuksen AP28 autopilottijärjestelmässä. Menukäskyjen nimet, ruudulla näkyvät dialogit ja painikkeiden nimet ilmoitetaan lihavoituna, esim. Main menu, Setup käsky, Left painike). Lukijalta erityistä huomiota vaativat tekstikohdat on korostettu seuraavasti: Tätä käytetään kiinnittämään lukijan huomio tiettyyn kommenttiin tai tärkeään tekstinkohtaan. Tätä käytetään varoittamaan käyttäjää milloin on tarpeen harjoittaa erityistä huolellisuutta materiaali- tai henkilövahinkojen estämiseksi. 2 AP28 Käyttäjän ohjekirja
4 Sisällysluettelo 1 Käyttö Yleiskatsaus ON/OFF (Päälle/pois) Taustavalaistus Standby moodi (valmiustila) Automaattinen ohjaus NoDrift moodi ("sortumatta reitillä") Navigointi AP28:lla Tuuliohjaus (purjeveneet) Tuuliohjaus ja navigointi (purjeveneet) Datasivut (tietonäytöt) Moniasemainen järjestelmä Päämenu (Main menu) Datasivujen asetukset Matkaloki Käyttäjän asetusvalikko (User setup) Kauko-ohjattu lukitus Asetukset asennuksen yhteydessä Ensimmäinen käynnistys Asennusmenu Huoltotietoutta Hälytysjärjestelmä Hälytysilmoitus AP28 Käyttäjän ohjekirja 3
5 4.2 Hälytyksen kuittaus Aktiivisten hälytysten tarkastelu Hälytysten koodit Vianetsintä SimNet status System data Resetoinnit Hälytykset Huoltotoimet Yleistä Hallintalaite Autopilotin tietokone Peräsinkulma-anturi Kompassi Servo Ohjelmiston (software) päivittäminen Valinnaisvarusteet R3000X kauko-ohjain (NFU) S35 Ohjausvipu (NFU) JS10 Joystick (NFU) AP28 ja MSD50 sisäperämoottoriyksikkö Sanasto AP28 Käyttäjän ohjekirja


6 1 Käyttö Autopilotti on erittäin hyödyllinen navigoinnin apuväline, mutta SE EI KOSKAAN KORVAA missään olosuhteissa ihmisnavigaattoria. Älä käytä automaattiohjausta seuraavissa olosuhteissa: Vilkkaassa liikenteessä tai kapeilla väylillä Huonossa näkyvyydessä tai kovassa merenkäynnissä Alueilla, jossa autopilotin käyttö on lailla kielletty Kun ajat autopilotilla: Älä jätä ruoria miehittämättä Älä laita mitään magneettisia esineitä autopilotin käyttämän suunta-anturin lähelle Varmista säännöllisin väliajoin aluksen suunta ja sijainti Vaihda aina ajoissa Standby moodille ja vähennä nopeutta, jotta et joutuisi vaarallisiin tilanteisiin 1.1 Yleiskatsaus Kuva 1-1 AP28 etupaneeli Käyttö 5
7 Painike PWR Kuvaus Virtakytkin ON-OFF / Valokytkin STBY AUTO NO- DRIFT NAV WIND TURN MENU Standby-painike (valmiustila) Asettaa Standby moodin Auto-painike (automaattiohjaus) Asettaa Auto moodin NoDrift-painike (sortumatta reitillä ohjaus) Asettaa NoDrift moodin Nav-painike (reittipistenavigointi) Asettaa Nav moodin Wind-painike (tuuliohjaus) Asettaa Wind moodin Turn-painike (käännös) Aktivoi käännöksen alamenun Luovii tai jiippaa tuulimoodilla Menu/Enter painike Avaa päämenun Asettaa arvon, vahvistaa, OK Toiminne riippuu soft-painikkeen symbolista Vasen nuolipainike Takaisin, vasempaan, peruuta, poistu Pitkä painallus: Palaa pääsivulle (toimintataso 1) Toiminne riippuu soft-painikkeen symbolista Oikea nuolipainike Seuraava, oikealle Toiminne riippuu soft-painikkeen symbolista Ylös painike Ylös menussa tai ruudun valikossa, lisää arvoa Toiminne riippuu soft-painikkeen symbolista Alas painike Alas menussa tai ruudun valikossa, vähentää arvoa Toiminne riippuu soft-painikkeen symbolista Vasemmalle painike Säätää käytettyä suuntaa tai tuulen kulmaa 1 tai 10 astetta 6 Käyttö
8 Painikeohjaus vasempaan Toiminne riippuu soft-painikkeen symbolista Oikealle painike Säätää käytettyä suuntaa tai tuulen kulmaa 1 tai 10 astetta Painikeohjaus oikealle Toiminne riippuu soft-painikkeen symbolista Soft-painike Kun painikkeen päätoimintatapa muuttuu, soft-painikkeen symboli ilmestyy juuri painikkeen yläpuolelle ilmoittaen painikkeen vaihtoehtoisen tehtävän. Seuraavia soft-painikkeen symboleja käytetään: Symboli Toiminne Symboli Toiminne Symboli Toiminne Ok Peruuta Takaisin Ylös Lisää Alas Vähennä Lisää Päivän taustavalaistus Matala oikealla Matala vasemmalla Seuraava Vähennä Asennus Nollaa osamatkaloki Yön taustavalaistus Näytä tiedot Symbolit Ei-aktiivinen yksikkö, datasivu ei käytössä Hälytyksen muistutus Lukittu Käyttö 7
9 Toimintamoodit AP28 järjestelmällä voidaan ohjata seuraavilla ensisijaisilla tavoilla: STBY (painikeohjaus), AUTO, NoDrift (sortumatta reitillä), NAV, WIND ja WIND NAV. Jokaisella moodilla paitsi WIND NAV on oma painikkleensa. WIND NAV moodia voidaan käyttää vain WIND moodissa (tuuliohjaus). Jokaisessa moodissa on käytettävissä monitoiminen moodinäyttö. Käyttäjän säädettävissä olevat asetukset löytyvät AP28:n Main menusta (sivu 45). Hälytykset Hälytykset näytetään selkokielisinä teksteinä. Ne kertovat järjestelmän sisäisistä ja ulkopuolisista vioista. Hälytykset sekä näkyvät että kuuluvat. Hälytysten luettelo on sivulla 105. Hallinnan siirto Moniasemaisessa järjestelmässä hallinta voidaan helposti siirtää asemalta toiselle painamalla minkä tahansa moodin painiketta. AP28:n ei-aktiiviset hallintalaitteet näyttävät ikonia. Kehittyneet toiminnat Katso lisätietoja Main menu sivu 48 ja Setup. 1.2 ON/OFF (Päälle/pois) Ensikäynnistys, katso sivu 63. Yksinkertainen painallus PWR painikkeesta käynnistää autopilottijärjestelmän ja näyttää käynnistyssivut. 8 Käyttö

 mistä tahansa asemasta painamalla PWR painiketta.")
10 Tuotteen nimi Sarjanumero Ohjelmistoversio Sen päiväys Versionumero ja päiväys näytetään vain esimerkkinä. Järjestelmä on käytettävissä noin 5 sekunnin kuluttua. Asema josta käynnistys tehtiin, näyttää Standby moodin ruutua. Moniasemaisessa järjestelmässä muut asemat näyttävät. Hallinta voidaan ottaa mihin tahansa asemaan painamalla sen STBY painiketta. Pitkä painallus PWR painikkeesta aloittaa järjestelmän alasajon. Autopilotti menee STBY moodiin ja sammuu 3 sekunnin kuluttua. Hätätilanteessa on mahdollista sammuttaa autopilotti (OFF) mistä tahansa asemasta painamalla PWR painiketta. Huomaa, että vaikka autopilotti on kyketty pois päältä, se kuluttaa hieman virtaa, ellei virtasyöttöä katkaista. 1.3 Taustavalaistus Näytön taustavalaistusta voidaan säätää milloin vain. PWR 1 Paina PWR painiketta - Valaistuksen ponnahdusikkuna tulee näytöllä olevan ruudun päälle 2 Paina jotain alla olevaa painiketta säätääksesi näytön taustavalaistusta: PWR a PWR painiketta lisätäksesi valaistusta yhden askeleen Käyttö 9
 STBY moodia käytetään kun alusta ohjataan käsin tai ruorista.")
 Standby moodissa voit painaa PORT tai STBD painikkeita. Non-Follow-Up (NFU) näyttö tulee esiin. Peräsin liikkuu niin kauan kuin painiketta painetaan.")
11 b Up/Down soft-painikkeita lisätäksesi / vähentääksesi valaistusta yhden askeleen c Day/Night soft-painikkeita vaihtaaksesi päiväja yö-profiilin välillä Jos säätöä ei tehdä 3 sekunnin kuluessa, valaistuksen ponnahdusikkuna sulkeutuu. Kontrastin ja päivä/yö-asetusten säätö, katso sivu Standby moodi (valmiustila) STBY moodia käytetään kun alusta ohjataan käsin tai ruorista. Näytön tiedot: Standby moodi Nykyinen suunta 346 M Kompassilähde: FC40 Peräsinkulma 04 oikealle Katso VRF (Virtuaalinen peräsinkulma) sivulta 74. Painikeohjaus (NFU) Standby moodissa voit painaa PORT tai STBD painikkeita. Non-Follow-Up (NFU) näyttö tulee esiin. Peräsin liikkuu niin kauan kuin painiketta painetaan. Peräsinkomento vasempaan Peräsinkomento oikealle Kun NFU vipua tai kauko-ohjainta käytetään, muut hallintayksiköt näyttävät (eiaktiivinen). Katso luku 7 aiheesta NFU ohjausvivut ja kaukosäätölaitteet. 10 Käyttö

12 Follow-Up -ohjaus (FU) Ei tule kysymykseen jos ohjaus Virtuaalisen peräsinkulmailmaisimen avulla on käytössä (sivu 74). Follow-Up ohjausmoodilla voidaan kierrettävää kurssinasetusnuppia käyttää antamaan ruorikomentoja. Pyydetty ruorikulma näkyy ruudussa ja peräsin kääntyy haluttuun kulmaan ja pysähtyy. Paina molempia samanaikaisesti aktivoidaksesi Follow-Up - ohjauksen Käytä ruorikomentoon kurssinasetusnuppla Follow-up ohjauksen ollessa käytössä et voi kääntää peräsintä käsin. STBY Palauta käsiohjaus päälle STBY painikkeella. Valmiustilan vaihtoehtoisia näyttömuotoja Hyppivä peräsinkulman näyttö Jos autopilottisi käyttää Simrad MSD50 Stern Drive-työyksikköä, peräsinkulman näyttö hyppii käynnistyksen jälkeen 10 astetta oikealle ja vasemmalle. Tämä kertoo, että peräsimen keskiasento on asetettava. Katso keskiasennon asetus sivulta 112. Käyttö 11
 mukaan, voit siirtyä käsiohjaukseen ohjauspyörästä riippumatta autopilotin moodista. Autopilotti menee valmiustilaan.")
 Kun AUTO painiketta painetaan, AP28 automaattisesti valitsee nykyisen suunnan asetetuksi ohjaussuunnaksi ja ylläpitää peräsinkulmaa.")
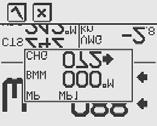
13 Ei peräsinkulma palkkia Kun autopilotti toimii virtuaalisen peräsinkulman (Virtual Rudder Feedback, VRF) mukaan, peräsinkulman palkkinäyttö on tyhjä valmiustilassa. Ei moodiosoitusta Kun autopilotti toimii EVC:n (Electronic Vessel Control) mukaan, voit siirtyä käsiohjaukseen ohjauspyörästä riippumatta autopilotin moodista. Autopilotti menee valmiustilaan. S -kirjain korvautuu väliviivalla osoittaen, että ohjaus tapahtuu ohjauspyörästä. Katso sivu Automaattinen ohjaus AUTO moodi (Kompassin mukaan) Kun AUTO painiketta painetaan, AP28 automaattisesti valitsee nykyisen suunnan asetetuksi ohjaussuunnaksi ja ylläpitää peräsinkulmaa. Täten moodin vaihtuessa siirtymävaiheesta saadaan pehmeä ja nykimätön. Automaattiohjauksen moodi Asetettu suunta: 340 astetta Kompassilukema: 339 M Kompassitieto: FC40 Peräsinkulma: 01 oikealle Nopeus: 12.8 kn (lokista) Ohjausparametri: LO-A (Alhainen vaste asetettu automaattisesti) 12 Käyttö
14 AP28 pitää aluksen asetetussa suunnassa ellei uutta moodia valita, tai uutta suuntaa aseteta kierrettävästä kurssinasetusnupista tai vasemmalle/oikealle painikkeista. Yksi kierros kurssinastusnupista vastaa 45 asteen kurssimuutosta. Pienenee Suurenee Kurssi säätyy 1 (tai 10 )/painallus Kurssin muutos Vastap.: Pienenee Myötäp.: Suurenee Moottorivenekäytössä voit asetusmenussa asetaa painikkeet muuttamaan kurssia 10 /painallus (katso sivu 61) Kun uusi suunta on asetettu, vene kääntyy automaattisesti uudelle suunnalle ja ylläpitää sitä. Suunnan "kaappaus" Kun autopilotti on AUTO tai NoDrift moodissa (sivu 30) suunnan kaappaus sallii parhaillaan suoritettavan käännöksen keskeyttämisen painamalla AUTO painiketta tai NoDrift painiketta. Autopilotti lopettaa käännöksen sillä hetkellä kun olet painanut AUTO painiketta tai NoDrift painiketta. Tämä on hyödyllinen piirre tilanteessa, missä et ole aivan varma tarvittavan käännöksen suuruudesta, esim. väylän nielu tai laituriin ajo. Automaattisen ohjauksen moodi Uusi kaapattu suunta: 305 Kompassin lukema: 311 M (magneettista) tai T (tosi) STBY Palaa manuaaliohjaukseen painamalla STBY painiketta. Käyttö 13

15 Ohjaustehokkuuden hallinta Kun AP28 toimii automaattimoodissa, se käyttää kahta erilaista ohjausparametrien sarjaa (HI/LO). Parametrit hallitsevat venettä määritellen veneen ohjausvasteen erilaisissa nopeuksissa tai tuulen suunnissa. Nämä kaksi parametrisarjaa voidaan valita automaattisesti tai käsin, ja kumpaakin voidaan käsin hienosäätää (vasteen säätö). Nopeutta, missä autopilotti vaihtaa automaattisesti LO parametreistä HI:in (tai päinvastoin) kutsutaan Transition HI-LO 'iksi (siirtymänopeus). Nopeus asetetaan Installation/ Commissioning/Seatrial menussa (sivu 83). Katso kaavio alla. Jos siirtymänopeutta ei ole asetettu, autopilotti ottaa käyttöön LO ohjausparametrit kun STBY asennosta siirrytään automaattiohjaukseen. Tämä on turvallisuuspiirre estämään yliohjausta Nopeus HI vasteen parametrit LO vasteen parametrit Siirtymmä LO parametreihin nopeuden lisääntyessä: 10 solmua Siirtymänopeudeksi asetettu 9 solmua Siirtymmä HI parametreihin nopeuden lisääntyessä: 8 solmua Näytön tekstit HI-A Korkean vasteen parametrit asetettu automaattisesti LO-A Alhaisen vasteen parametrit asetettu automaattisesti HI-M Korkean vasteen parametrit asetettu käsin LO-M Alhaisen vasteen parametrit asetettu käsin 14 Käyttö
16 Moottoriveneet Moottoriveneissä automaattivalinta HI ja LO tapahtuu yksinomaan veneen nopeuden perusteella yllä olevan kaavion mukaisesti. Purjeveneet Kun purjehditaan WIND moodilla, parametrien asetus riippuu veneen nopeudesta ja tuulen suunnasta alla olevan kuvan mukaisesti. Jos menetät liiaksi nopeutta esim. luovia tehtäessä, parametrit vaihtuvat HI-puolelle vahvistamaan peräsimen vastetta riittäväksi. Tämä tulee huomioida purjeveneen siirtymänopeutta asetettaessa. Katso myös Tuulivaste sivulla 16. Vasteen säätäminen AP28-autopilotin Autotune-toiminne on niin kehittynyt että useimmat veneet eivät tarvitse sen enempää ohjausparametrien säätöä. Muutamissa veneissä ja tietyissä meriolosuhteissa ohjausparametrien hienosäätö saattaa parantaa autopilotin suorituskykyä. Vastesäätö sallii molempien parametriryhmien (HI/LO) hienosäädön yhdeksällä tasolla. Taso 4 on oletusarvo, jonka Autotune-toiminne asettaa. Jos Autotunea ei tehdä (emme suosittele), tason 4 arvot ovat tehdasarvot (oletusarvot). Alhainen vasteen arvo vähentää peräsimen liikkeitä ja antaa "löysemmän" ohjaustuntuman. Korkea vasteen arvo tekee peräsimen liikkeistä herkemmän ja antaa "tiukemman" ohjaustuntuman. Liian korkea ohjausvaste aiheuttaa veneen kiemurtelua. Käyttö 15
 Varmistaudu, että ohjauskurssin (Course To Steer, CTS) ja keulasuunnan ero on hyväksyttävässä minimirajassa.")
17 Kuvissa RESPONSE sivulla korostettu parametri Response on aktiivinen. MENU HI ja LO arvoja voidaan säätää vaikka vene ei olisi vedessä. Alue Muutos per painallus Oletusarvo Tuulivaste (purjeveneet) Varmistaudu, että ohjauskurssin (Course To Steer, CTS) ja keulasuunnan ero on hyväksyttävässä minimirajassa. Jos asetetun tuulikulman ja toteutuneen tuulikulman ero on liian suuri, lisää tuulivastetta Wind response pienentääksesi eroa. Jos todellinen tuulikulma pyörii asetetun tuulikulman ympärillä, tai jos peräsintoiminta on liian "sahaavaa", tuulivastetta pitää pienentää. 16 Käyttö



18 MENU Alue Muutos per painallus Oletusarvo HI/LO parametrien valinta MENU Manual select kohdassa on kolme vaihtoehtoa: Auto HI LO. Auto asetetaan automaattisesti nopeuden mukaan HI ja LO on asetettava manuaalisesti, kun nopeustietoa ei ole Käyttö 17
 Autopilotti tarjoaa joukon erilaisia ohjauskuvioita AUTO moodissa.")

 U-käännös muuttaa asetetun suunnan 180 asetta vastakkaisen suuntaan. Tämä ominaisuus on hyödyllinen esim.")
19 Näytön alaotsikko kertoo aktiivisen parametrin ja kuinka se on asetettu. Ohjauskuviot (moottoriveneet) Autopilotti tarjoaa joukon erilaisia ohjauskuvioita AUTO moodissa. Käännöskuvion valinnan ja käännöksen alkamisen välillä on yhden minuutin aikaväli. Tänä aikana autopilotti jatkaa asetetulla suunnalla. Ohjattaessa kuvion mukaan voit milloin tahansa säätää arvoja painamalla painiketta. Lopettaaksesi ohjauskuvioajon, paina vain yksinkertaisesti AUTO painiketta. U-käännös (U-Turn) U-käännös muuttaa asetetun suunnan 180 asetta vastakkaisen suuntaan. Tämä ominaisuus on hyödyllinen esim. mies-yli-laidantilanteissa, ja muuten jos halutaan palata samaa reittiä takaisin. TURN Paina joko tai soft-painiketta valitaksesi kumpaan suuntaan käännös tehdään, ja aloittaaksesi sen. Vene tekee U-käännöksen oikealle 18 Käyttö


20 C-käännös (C-turn) Autopilotti mahdollistaa jatkuvan kääntymisen AUTO moodissa. Tätä voidaan käyttää pyörittäessä kalaparven tai vedenalaisen kohteen ympäri. C-käännöksessä vene kääntyy ympyrässä vakiokäännösnopeudella (Rate of Turn, ROT). Käyttäjän valittavissa on kääntyykö vene vasemman vai oikean kautta. C-käännös aloitetaan seuraavasti: TURN Paina tai soft-painiketta valitaksesi käännöksen suunnan ja aloittaaksesi sen. Käännösnopeutta (The turn rate, ROT) voidaan säätää ennen kuin käännös on aloitettu ja käännöksen aikana. Käännösnopeuden lisäämisestä seuraa pienempi kääntöympyrä ja päinvastoin. Käyttö 19




21 MENU Käännöksen parametri Alue Muutos per painallus Oletusarvo Yksiköt Käännösnopeus /min Spiraalikäännös (Spiral-turn) Spiraalikäännöstä voidaan käyttää pyörittäessä kalaparven tai vedenalaisen kohteen ympäri. Spiraalikäännös asettaa veneen pyörimään spiraalissa, jossa on joko pienenevä tai suureneva säde. Spiraalikäännös aloitetaan seuraavasti: TURN Aloitussäde voidaan valita ennen käännöksen aloittamista. 20 Käyttö
22 Paina joko tai soft-painiketta valitaksesi käännöksen suunnan ja aloittaaksesi sen. Käännöksen kestäessä sädettä voidaan muuttaa, change in radius. Arvo jalkoina tai metreinä ilmoittaa, paljonko säde muuttuu jokaisella kierroksella. Jos ch. radius on asetettu nollaksi, vene pyörii ympyrää. MENU Negatiivinen arvo ilmoittaa pienenevää sädettä, positiivinen suurenevaa. Suureneva säde Pienenevä säde Käännöksen parametri Alue Muutos per painallus Oletusarvo Aloitussäde 33 ft ft 10 m m ft 200 m Säteen muutos per kierros -164 ft ft -50 m m ft 20 m Käyttö 21
 Sik-sak-käännös aloitetaan seuraavasti: TURN Suunnanmuutos voidaan asettaa ennen käännöksen aloittamista (2-70 ).")
23 Säteen yksikkö on sama kuin asetettu syvyyden yksikkö (jalkoja tai metrejä). Sik-sak-käännökset (Zigzag-turns) Sik-sak-käännös aloitetaan seuraavasti: TURN Suunnanmuutos voidaan asettaa ennen käännöksen aloittamista (2-70 ). Paina joko tai soft-painiketta valitaksesi käännöksen suunnan ja aloittaaksesi sen. Kun purjehdit sik-sakia, voit muuttaa suunnanmuutosta, osamatkan pituutta ja pääsuuntaa. Nuoli osoittaa, kumpaan suuntaan seuraava suunnanmuutos on tehtävä. 22 Käyttö
.")
24 MENU Ensimmäinen käännös 20 Pääohjaussuunta Suunnan muutos 40 Ajettu osamatka Käännöksen parametri Alue Muutos per painallus Oletusarvo Suunnanmuutos Osamatka 82 ft ft 25 m m ft 500 m Osamatkan pituuden yksikkö on sama kuin asetettu syvyyden yksikkö (jalkoja tai metrejä). Suorakulmainen käännös (Square turn) Suorakulmainen käännös AUTO moodissa voidaan tehdä suorakaiteen muotoisena tai missä tahansa kuviossa, missä seuraava käännös on 90. Suorakulmaisen käännöksen moodiin päästään: Käyttö 23


25 TURN Ajettu osamatka Paina joko tai soft-painiketta valitaksesi käännöksen suunnan ja aloittaaksesi sen. Voit milloin tahansa muuttaa pääsuuntaa. Voit myös milloin tahansa muuttaa osamatkan pituutta ennen kuin alus aloittaa uuden 90 käännöksen. MENU 24 Käyttö
. Hidas S-käännös (Lazy S-turn) Hitaan S-käännöksen moodiin päästään: TURN Suunnanmuutosta voidaan säätää ennen käännöksen aloittamista (2-80 ).")
26 Käännöksen parametri Alue Muutos per painallus Oletusarvo Osamatka 82 ft ft 25 m 3000 m ft 500 m Osamatkan pituuden yksikkö on sama kuin asetettu syvyyden yksikkö (jalkoja tai metrejä). Hidas S-käännös (Lazy S-turn) Hitaan S-käännöksen moodiin päästään: TURN Suunnanmuutosta voidaan säätää ennen käännöksen aloittamista (2-80 ). Paina joko tai soft-painiketta valitaksesi käännöksen suunnan ja aloittaaksesi sen. S-käännösten sarjassa voit muuttaa suunnanmuutoksen suuruutta, kääntösädettä ja pääsuuntaa. Nuoli näyttää seuraavan käännöksen suunnan. Säädä suunnanmuutosta ja sädettä seuraavasti: Käyttö 25
27 MENU Ensimmmäinen käännös Pääohjaussuunta Suunnanmuutos Laajempi kääntösäde Pääohjaussuunta Pienempi kääntösäde Käännöksen parametri Alue Muutos per painallus Oletusarvo Suunnanmuutos Säde 16 ft ft 5 m 500 m ft 200 m Säteen yksikkö on sama kuin asetettu syvyyden yksikkö (jalkoja tai metrejä). Syvyyskäyrän seuranta (Depth Contour Tracking, DCT TM) Kaikuluotaimesta saatavan tiedon mukaan autopilotti voidaan asettaa ohjaamaan venettä asetetun syvyyden mukaan. Tämä voi olla hyödyllistä jos haluat seurata 26 Käyttö





28 tiettyä syvyyskäyrää. Varmistaudu, että järjestelmä saa syvyystiedon. Tasainen pohja Kivikkoinen pohja Rinne Kapea väylä Harjanne Älä käytä tätä ominaisuutta ellei merenpohja ole siihen sopiva. Älä käytä kivikkoisilla vesillä, missä veden syvyys vaihtelee huomattavasti pienellä alueella. TURN Todellinen vedensyvyys näkyy näytöllä. Käyttö 27
 sen syvyyskäyrän suunta mitä haluat seurata.")
29 Ohjaa vene siihen syvyyteen mitä haluat seurata, ja syvyyskäyrän suuntaiseksi (pääsuunta). Kun haluttu syvyys näkyy näytöllä, aktivoi syvyyskäyrän seuranta joko tai soft-painikkeella. Käytä painiketta kun vesi mataloituu vasemalle, tai painiketta kun se mataloituu oikealle. Pääsuunta Tämän pitäisi olla (suunnilleen) sen syvyyskäyrän suunta mitä haluat seurata. Jos syvyyskäyrä tekee suuren suunnanmuutoksen, sinun on manuaalisesti säädettävä uusi suunta. Näin autopilotti voi reagoida nopeammin. Ellei uutta suuntaa valita, autopilotti tarvitsee enemmän aikaa kääntymiseen ja veneen ohjaamiseen haluttuun syvyyteen. Alanäytössä on seuraavat säätömahdollisuudet: Syvyyden vahvistussäätö (Depth gain) Autopilotti seuraa syvyyttä laskemalla reittipoikkeamavirhettä kun vene on eksynyt asetetusta syvyydestä. Tämä ominaisuus muuttaa automaattisesti suuntaa niin, että vene löytää jälleen oikean syvyyden. Käytä syvyyden vahvistussäätöä saadaksesi ohjausvaste voimakkaaksi tai pehmeäksi syvyyden muutuessa. MENU 28 Käyttö
30 Syvyyskäyrän reittipoikkeama (Contour Cross Angle, CCA) Tällä parametrilla voit saada aluksen tekemään loivia S- käännöksiä yli asetetun syvyyden. Kun CCA:n arvo on asetettu nollaan, ei käännöksiä tehdä. CCA on kulma joka lisätään tai vähennetään asetetusta suunnasta. Joka kerran kun vene ylittää asetetun syvyyskäyrän, CCA:n etumerkki (+/-) muuttuu ja se saa veneen kääntymään takaisin ja lähestymään syvyyskäyrää vastakkaisesta suunnasta. Mitä suurempi CCA sitä laajempi käännös. CCA asetettu 15 asteeseen. Lähestytään asetettua syvyyttä vasemmalta Asetettu syvyys CCA asetettu 15 asteeseen. Lähestytään asetettua syvyyttä Käännöksen parametri Alue Muutos per painallus Oletusarvo Pääsuunta Syvyyden vahvistusasetus CCA Viitesyvyys, asetettu syvyys (Reference depth) Asetettu syvyys lukitaan kun DCT TM aktivoidaan. Muuta asetettua syvyyttä yksinkertaisesti Up tai Down painikkeilla. Käyttö 29

.")
31 Luoviminen Auto moodilla (purjevene) Luovin toiminne on saatavilla vain kun asennuksen asetuksissa on määritelty veneen tyypiksi SAIL. Luoviminen AUTO moodissa on erilaista kuin luoviminen WIND moodissa. AUTO moodissa luovimiskulma on kiinteä. Se voidaan asettaa Setup/Sailing menussa. Oletusarvo luovikulmalle on 100. Luoviminen tulee tehdä vain tuuleen. Se pitää kokeilla lähes tyynellä merellä ja kevyessä tuulessa jotta näkisit, miten se toimii veneessäsi. Veneiden suurten erojen vuoksi luovimisen suorittaminen vaihtelee veneestä toiseen. Paitsi kiinteä suunnanmuutos ja ero näytön sanomissa, menetelmä on samantapainen kuin U- käännöksissä (sivu 17). Vain purjeveneille TURN Vene tekee luovin oikealle 1.6 NoDrift moodi ("sortumatta reitillä") NoDrift moodi on vaihtoehto reittiohjauksille. Se käynnistyy automaattisesti kun painat NODRIFT painiketta. Tietolähde NoDrift moodissa toimittaessa on sijainnin (Position, Pos) lähde. Jotta voisit toimia NoDrift-tilassa, on GPS/karttaplotterin oltava päällä. 30 Käyttö
 voidaan muuttaa samalla lailla kuin Auto moodissakin. Kompassisuunta: 345 M NO- DRIFT Peräsinkulma: 01 oikealle Nopeus: 6.")

32 Toisin kuin Auto moodissa, autopilotti ohjaa alusta huomioiden tuulen ja virran vaikutukset, kun NoDrift moodi on käytössä. Ohjaussuuntaa (suuntimalinjaa) voidaan muuttaa samalla lailla kuin Auto moodissakin. Kompassisuunta: 345 M NO- DRIFT Peräsinkulma: 01 oikealle Nopeus: 6.8 kn lokista Ohjausparametri: HI-A Väistäminen (paluu aiemmalle suuntimalinjalle) AP28:ssä ei ole erityistä väistöpainiketta. NoDriftmoodissa yksinkertaisesti paina STBY ja ohjaa sähköisesti tai ruorista kääntämällä esteen ohi. Jos palaat NoDrift-moodiin 60 sekunnin kuluessa, tulee esiin seuraava näyttö tarjoten kahta vaihtoehtoa: NO- DRIFT Palaa NoDrift-moodiin aiemmalle suuntimalinjalle. Palaa NoDrift-moodiin nykyiselle suuntimalinjalle. Jos kumpaakaan soft-painikkeista ei paineta 5 sekunnin kuluessa, kysymysruutu katoaa ja autopilotti menee NoDrift-moodiin senhetkinen suunta asetettuna suuntimaksi. Jos väistöliikkeet ottavat pitemmän ajan kuin 60 sekuntia, autopilotti jää valmiustilaan. 1.7 Navigointi AP28:lla AP28 käyttää ulkoisen navigaattorin (GPS, karttaplotteri) antamaa tietoa ohjaamaan alus tiettyyn reittipisteeseen, tai useamman reittipisteen muodostamaa reittiä pitkin perille. Navigaattorista saadun tiedon perusteella, AP28 Käyttö 31
 perusteella.")
33 muuttaa ohjaussuuntaa automaattisesti, pitäen aluksen reittilinjalla. Jos AP28 on kytketty sellaiseen navigaattoriin mikä ei lähetä tietoa suunnasta seuraavaan reittipisteeseen, se ohjaa vain reittipoikkeaman (Cross Track Error, XTE) perusteella. Tässä tapauksessa on jokaisessa reittipisteessä palattava AUTO moodiin ja manuaalisesti asetettava suunta seuraavalle reittipisteelle. Sitten valitaan jälleen NAV moodi. Jotta navigointiohjaus toimisi kunnolla, on seuraavien edellytysten oltava olemassa ennen kuin vaihdetaan NAV moodiin: AP28 automaattiohjauksen on oltava testattu ja todettu toimivan tyydyttävästi Navigointivastaanottimen (GPS, karttaplotteri) täytyy olla täysin toimiva ja sen signaalin tulee olla riittävä sijainninmääritystä ja navigointia varten Ainakin yksi reittipiste pitää olla syötetty ja aktivoitu käytössä olevaksi määränpääksi ( GO TO waypoint) Normaalissa NAV moodissa tieto saadaan navigointilaitteesta (Nav source). Normaalisti se on sama kuin sijaintitiedon lähde (GPS/karttaplotteri), katso sivu 51. Navigointiohjausta tulisi käyttää vain avoimilla vesillä. Kun NAV moodi valitaan, AP28 säilyttää nykyisen suunnan ja pyytää käyttäjää hyväksymään suunnanmuutoksen kohti uutta reittipistettä. Paina NAV painiketta aktivoidaksesi NAV kehotteen näytölle. NAV Kehotenäyttö kertoo seuraavan reittipisteen (WP) nimen, suuntimalinjan (the bearing of the track line, BWW) edellisestä reittipisteestä määränpäähän, tarvittavan suunnanmuutoksen (course change, CHG) ja suunnan mihin vene tulee kääntymään. 32 Käyttö
: 005 on autopilotin asettama suunta, jolla alus pysyy reittilinjalla ja ylläpitää suuntaa kohteeseen. Reittipoikkeama (Cross Track Error, XTE): 1.")
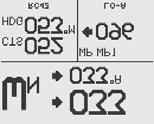
34 Jos vain yksi reittipiste on syötetty, suuntima on nykyisestä sijainnista määränpäähän. NAV moodi Ohjaussuunta (Course to steer, CTS): 005 on autopilotin asettama suunta, jolla alus pysyy reittilinjalla ja ylläpitää suuntaa kohteeseen. Reittipoikkeama (Cross Track Error, XTE): nm Veneen kuva näyttää onko alus suunnitellun reitin oikealla vai vasemmalla puolella Kompassisuunta: 350 M Seuraava reittipiste: WP1 Nopeus pohjan suhteen (Speed over ground, SOG): 12.8 kn (solmua) Etäisyys seuraavaan reittipisteeseen (Distance to next waypoint, DTW): nm Ohjausparametri: LO-A Reittipoikkeaman desimaalien määrä riippuu GPS/karttaplotterista. Kolme desimaalia turvaa tarkemman reitillä pysymisen. Kun AP28:ää käytetään NAV moodissa useamman reittipisteen muodostamalla reitillä, niin AP28 ohjaa lähimmälle reitin suuntaiselle reittipisteelle kun olet hyväksynyt NAV moodin kehotteen. Kun saavut reittipisteelle, AP28 antaa äänihälytyksen ja varoituksen näytöllä. Se näyttää uuden suunnan tiedot ja aloittaa automaattisesti uuden osamatkan. Jos vaadittava suunnanmuutos on yli asetetun NAV muutosrajan (oletusarvo on 10 ), sinun on hyväksyttävä uusi suunta. Tämä on turvallisuusominaisuus. Katso sivulta 73 miten rajaa muutetaan, "NAV change limit". Käyttö 33

35 STBY Hälytysruutu Paina soft-painiketta hyväksyäksesi suunnanmuutoksen, joka on suurempi kuin 10. Jos muutosta ei hyväksytä, AP28 jatkaa nykyisellä asetetulla suunnalla AUTO moodilla. Saat veneen manuaaliohjaukseen painamalla STBY. Saapumisympyrän asettaminen Reittinavigoinnissa suositellaan käyttämään automaattista reittipisteen vaihtoa käyttämällä reittipisteen saapumisympyrää. Saapumisympyrä pitäisi säätää veneen nopeuden mukaiseksi. Mitä suurempi nopeus, sitä laajempi ympyrä. Tarkoituksena on saada autopilotti aloittamaan suunnanmuutos tarpeeksi ajoissa, jotta siirtymisestä seuraavalle osamatkalle tulisi pehmeä. Alla olevaa kaaviota voidaan käyttää valittaessa sopivansuuruista saapumisympyrää GPS/karttaplotterille. 34 Käyttö
36 Esimerkki: Kun veneen nopeus on 20 solmua, saapumisympyrän säteen tulisi olla 0.09 nm. Reitillä sijaitsevien reittipisteitten etäisyys toisistaan ei saa olla pienempi kuin saapumisympyrän halkaisija, kun käytetään automaattista reittipisteen vaihtoa. Vaihtoehtoiset navigoinnin tietolähteet Jos AP28:ään on kytketty enemmän kuin yksi navigaattori, voit valita mitä niistä käytetään navigointiin. Katso Setup menusta Sources, miten valita toinen navigaattori (sivu 53). 1.8 Tuuliohjaus (purjeveneet) WIND moodi on käytettävissä vain jos järjestelmä on asetettu SAIL moodiin asennusmenussa (Installation Menu). Ennen siirtymistä WIND moodiin AP28 järjestelmän tulee toimia AUTO moodissa, ja tuulianturista on saatava luotettava tieto. WIND moodiin mennään painamalla WIND painiketta. Tuulinäyttö kertoo seuraavaa: Käyttö 35
 tai T (True, tosi) Peräsinkulma: 00 oikealle Nopeus lokista: 12.")
37 Wind moodi WIND Asetettu tuulikulma: 008 astetta oikealta Mitattu tuulikulma: 008 A (Apparent, suhteellinen) tai T (True, tosi) Ohjaussuunta (jolla ylläpidetään asetettu tuulikulma): 345 Suunta: 344 M (Magnetic, magneettinen) tai T (True, tosi) Peräsinkulma: 00 oikealle Nopeus lokista: 12.8 kn Parametri: LO-A (Low arvot, automaattisesti asetettu) Asetettu ohjaussuunta (course to steer, CTS) ja asetettu tuulikulma tulevat kompassista ja tuulianturista sillä hetkellä kun WIND moodi on valittu. Tästä pisteestä lähtien autopilotti muuttaa suuntaa tuulen vaihtelun mukaisesti säilyttääkseen tuulikulman. Jos kumulatiivinen muutos tuulen suunnassa ylittää asetetun arvon, WIND SHIFT äänihälytys kuuluu. Asetettua tuulikulmaa säädetään seuraavasti. Vasempaan Oikealle Säädä asetettua tuulikulmaa 1 / painallus Päätuulikulma säätyy Vastap.: Vasempaan Päätuulikulma säätyy: Oikealle STBY Saat käsiohjauksen haltuusi painamalla STBY. 36 Käyttö

38 Luoviminen Wind moodissa Luoviminen WIND moodissa eroaa AUTO moodista siten, että purjehdittaessa suhteellnen tai todellinen tuulen suunta referenssinä, todellisen tuulikulman tulisi olla alle 90 astetta. Luovimisoperaatio muodostaa välittömästi peilikuvan asetetusta tuulen suunnasta keulan vastakkaiselle puolelle. Näytöllä näkyy luovimisikkuna. Kääntönopeus luovin aikana asetetaan Tack time parametrillä Setup/Sailing menussa (sivu 58). Luovin kestoaika riippuu myös veneen nopeudesta, jolla pyritään minimoimaan nopeuden menetys luovin aikana. Nopea painallus TURN painikkeesta aktivoi käännöksen ja vene aloittaa kääntymisen vastakkaiseen tuulikulmaan. Uusi painallus TURN painikkeesta sen jälkeen kun luoviikkuna on ilmestynyt ruudulle, keskeyttää käännösoperaation ja vene palaa aikaisemmin asetetulle tuulikulmalle. TURN Käyttö 37

39 Jiippi Jiippi on mahdollista kun tuulen todellinen kulma on enemmän kuin 120. TURN Jiipin suoritushetki riippuu veneen nopeudesta. Se pitäisi tehdä niin nopeasti kuin mahdollista, mutta hallitusti. Luovin ja jiipin esto Vasta- ja myötäaallokossa autopilotin käyttö on kriittisintä. Kun purjeet eivät ole tasapainossa vasta-aallokkoon ajettaessa, purjeiden sivuttaisvääntö saattaa ajaa veneen tuuleen. Jos vene ajetaan alle asetetun minimituulikulman (katso sivu 90), purjeiden "veto" häviää yht'äkkiä ja veneen nopeus putoaa. Veneen ohjaus vaikeutuu koska peräsin menettää tehoaan. Luovinestotoiminne WIND moodissa on tehty välttämään tällaisia tilanteita. se reagoi välittömästi jos suhteellinen tuulikulma pienenee alle 5 asetetusta minimituulikulmasta ja kääntää peräsintä voimakkaasti. Myötäaallokossa veneen ohjaaminen on vaikeaa kun aallot tulevat sivulta tai takaa. Aallot saattavat vääntää veneen ei-toivottuun jiippiin. Tämä voi olla vaarallista sekä miehistölle että mastolle. Jiipinestotoiminne aktivoituu kun suhteellinen tuulikulma tulee suuremmaksi kuin 175 tai menee asetetun tuulikulman vastakkaiselle puolelle. Peräsintä käännetään voimakkaasti estämään ei-toivottu jiippi. Luovin ja jiipinestotoiminteet eivät ole tae siitä, ettei alus joutuisi varalliseen tilanteeseen. Jos 38 Käyttö
40 peräsimen ja/tai työyksikön teho eivät riitä, vaaratilanne saattaa tapahtua. Huolehdi siitä, ettei tällaiseen tilanteeseen jouduta. 1.9 Tuuliohjaus ja navigointi (purjeveneet) Autopilotti voi ohjata venettä sekä tuulitiedon että GPS/karttaplotterilta saadun reittitiedon perusteella. Tätä moodia kutsutaan WIND NAV moodiksi. Tässä automaattiohjaus perustuu joukkoon kriteereitä (katso kohdat seuraavalla sivulla). Tuuliohjaus ja navigointi aloitetaan painamalla NAV painiketta tuulimoodissa (1). Ensimmäisen suunnanmuutoksen (CHG), joka tarvitaan purjehtimisen reittipistettä kohti, määrittelee autopilotti. Se käyttää nykyistä tuulensuuntaa näissä laskuissa. Suunnanmuutos hyväksytään painamalla softpainiketta [2]. Käyttö 39
41 Toiminta WINDNAV moodissa Katso Figure 1-2 joka näyttää, miten purjevene siirtyy Wind NAV moodiin purjehtiakseen mahdollisimman tehokkaalla tavalla reittipisteeseen WP1. 1. Autopilotti on vielä Wind moodissa kun vene lähestyy pistettä 2. Reittipiste WP1 on asetettu karttaplotteriin. 2. Wind NAV moodi asetetaan ja autopilotti kehottaa vahvistamaan suunnanmuutoksen 71 astetta oikealle. 3. Vene on nyt matkalla kohti pistettä 4, missä tarvitaan luovi oikealle jotta vene ei ajaisi maihin. Matka käännöspisteeseen (distance to tack, DTT) näkyy samoin kuin VMG tuuleen ajettaessa. Lisäksi autopilotti näyttää ohjauskurssin ja keulasuunnan. 4. Autopilotti on aloittanut käännöksen ja luovi-ikkuna on ruudulla. 5. Autopilotti näyttää nyt tiedot uudesta osamatkasta ja seuraavasta luovista. 6. Olet ylittänyt suoran reittilinjan ja autopilotti ehdottaa uutta luovia vasempaan. 7. Uusi käännös suoritetaan. 8. Olet viimeisellä osamatkalla suoraan kohti reittipistettä. Autopilotti pitää nyt veneen kurssilla (XTE) ja näyttää suuntiman ja etäisyyden reittipisteeseen. 40 Käyttö




42 Figure 1-2 Käyttö 41
43 1.10 Datasivut (tietonäytöt) Joukko datasivuja voidaan esittää, jos tieto löytyy SimNetistä (katso sivu 103). Kun jokin pääsivuista on esillä, voit vierittää datasivuja painamalla Up/Down painikkeita. Kun menet datasivuille, viimeiksi käytetty sivu tulee esiin ensin. Jos haluat muuttaa esillä olevien sivujen määrää, mene Main menu/data pages setup. Kun datasivut ovat esillä, ruudun vasemmassa laidassa näet seuraavaa tietoa riippuen käytössä olevasta moodista: Standby moodi Kompassisuu nta Suunnan lähde Auto moodi Asetettu kurssi Kompassisuunta Suunnan lähde HI parametrit, asetettu automaattisesti Nav/NoDrift moodi Ohjattava suunta Reittipoikkeama (XTE) HI parametrit, asetettu automaattisesti Wind (tuuli)moodi Asetettu tuulikulma Toteutunut suhteellinen tuulikulma HI parametrit, asetettu automaattisesti WindNAV moodi Oikotieohjaus Asetettu tuulikulma Toteutunut suhteellinen tuulikulma HI parametrit, asetettu automaattisesti 42 Käyttö









44 Käytettävissä olevat datasivut Päämoodin ruutu 1.11 Moniasemainen järjestelmä Normaalikäytössä järjestelmää voidaan hallita kaikista AP28-järjestelmään liitetyistä asemista. Yksi hallintalaite on aktiivinen ja antaa käyttäjälleen pääsyn kaikkiin laitteisiin. Kaikki muuta asemat ovat "ei-aktiivisia", eikä niillä voi muuttaa suuntaa. Yksi painallus "ei-aktiivisen" hallintalaitteen moodinäppäimiin ja siitä asemasta tulee "aktiivinen". Ei-aktiivinen asema Käyttö 43

45 44 Käyttö Päämenu katso englanninkielinen versio seuraavalla sivulla.
46 2 Päämenu (Main menu) Päämenussa löydät aiheita autopilotin käytöstä, asennuksesta ja asetuksista. Huoltomenu esittelee sinulle järjestelmätietoa. Täältä pääset myös demo-moodiin. MAIN MENU LEVEL 2 LEVEL 3 LEVEL 4 Response Data pages setup Trip log User setup Enable/Disable Restore data pages Damping Alarms Sources Display Language Units Seastate filter Sailing Course adjust Installation Commissioning Dockside Boat type Rudder feedback Virtual feedback Drive voltage Drive engage Rudder test Depth calibration Min wind angle Nav change limit Automatic steering Seatrial Status Transition HI-LO Autotune Recall autotuned Manual tuning Min wind angle Nav change limit Set rudder 0 Compass calibration Wind calibration Boat speed calib Transition HI-LO Autotune Manual tuning Service Calibration Boat type Rudder drive SimNet config SimNet status System data Resets Demo About AP28 Boat speed Depth Apparent wind Compass Rudder feedback Virtual feedback SimNet groups Instance number Autopilot reset Global reset Calibrate w/sog SPD correction Offset Offset Calibrate Offset Max stbd/port Set rudder 0 Remote lock Päämenu 45


47 Main menu aktivoituu painamalla MENU. Main menun aiheet sallivat pääsyn edelleen alamenuihin ja parametrien asetuksiin. Parametrien asetukset on yleensä esitelty oikealla, mutta joskus ne voidaan esittää ponnahdusikkunoilla. Yksiköt esitetään oikeassa laidassa. Kieliasetukset esitetään päällekkäisruudulla Painikkeita käytetään menujärjestelmässä navigointiin seuraavasti: PAINIKE YKSI PAINALLUS PIDÄ PAINETTUNA MENU Vahvistaa valinnan/parametrien asetukset Mene seuraavalle menutasolle/ parametrien asetukset Mene edelliselle menutasolle/ parametrien luettelo Palaa takaisin näytön aktiivitilaan Mene edelliseen/seuraavaan menun aiheeseen, nosta/laske parametrin arvoa 2.1 Datasivujen asetukset Kaikki saatavilla olevat datasivut ovat esillä oletusarvona. Katso sivu 43. Jos haluat, että datasivuja on vähemmän, sivuja voidaan passivoida. 46 Päämenu


48 Sivujen piilottaminen Jatka sivujen valintaa ja toista menetelmä jos haluat piilottaa lisää sivuja. Paina ja pidä painettuna Left painike jättääksesi menun ja palataksesi viimeiksi esillä olleelle sivulle. Sivujen aktivointi Piilotettu (disabled) sivu näkyy ainoastaan Avaa/piilota (Enable/disable) -käskyä käytettäessä. Piilotettu sivu osoitetaan rastitetulla ruudulla. Jatka sivujen valintaa ja toista menetelmä jos haluat aktivoida lisää sivuja. Paina ja pidä painettuna Left painike jättääksesi menun ja palataksesi viimeiksi esillä olleelle sivulle. Päämenu 47


 Käyttäjän asetusvalikko sisältää aiheita,")

49 Kaikkien sivujen aktivointi Kaikki piilotetut sivut saadaan takaisin näkyviin käskyllä Restore data pages: 2.2 Matkaloki Matkaloki näyttää: a. kokonaismatka laitteen asennuksesta tai tehdystä tehdasasetuksesta b. osamatka ja kulunut aika siitä kun osamatkaloki käynnistettiin/nollattiin Osamatkalokin nollaus Osamatkaloki nollautuu painamalla Reset soft-painiketta. 2.3 Käyttäjän asetusvalikko (User setup) Käyttäjän asetusvalikko sisältää aiheita, joita käyttäjä ei tarvitse säännöllisesti. Seuraavassa käsitellään näitä aiheita: - Vaimennustekijöiden muuttaminen - Hälytysten asetukset - Automaattinen ja manuaalinen lähteen valinta 48 Päämenu

, sivulta 45 eteenpäin.")


50 - Näytön asetusten muuttaminen - Kielen valinta - Yksiköiden asetukset - Merenkäynnin suodattimen asetukset - Purjehdusasetusten muuttaminen Tässä osiossa oletetaan, että käyttäjä tuntee painikkeet ja osaa navigoida menuissa. Ellei, katso Päämenu (Main menu), sivulta 45 eteenpäin. Vaimennus Vaimennuskerroin ilmoittaa, kuinka nopeasti näyttö reagoi muutoksiin. Mitä korkeampi vaimennuskerroin, sitä vakaampi näyttö. Suhteellisen tuulen vaimennus suoritetaan Advanced Wind Filter (AWF) avulla autopilotin tietokoneessa. Lisättäessä tuulen vaimennusta ( Wind damping ) AWF:n reagointi riippuu enemmän suunnasta ja veneen nopeudesta. Vähennettäessä tuulen vaimennusta AWF luottaa enemmän "raakaan" tietoon suhteellisen tuulen kulmasta. Päämenu 49

51 AWF:n saama nopeustieto on nopeus pohjan suhteen (Speed Over Ground, SOG). Jos SOG tietoa ei ole saatavana, AWG käyttää tietoa nopeudesta veden suhteen. Jos kumpaakaan ei ole saatavilla, AWF käyttää veneen nopeutena 1.5-kertaista siirtymänopeutta. Asetus Alue Muutos per painallus Oletusarvo Veneen nopeus 4 Suunta 1 Suhteellinen tuuli Tuulen muutos 4 Syvyys 1 Hälytykset AP28 voidaan asettaa suorittamaan hälytys kun tietyt aluksen tai ympäristön parametrit ylittävät ennalta asetetut arvot. Hälytysseuranta passivoidaan asettamalla sen parametrin arvoksi Off. 50 Päämenu
52 Matala vesi Hälytyksen asetus on koko järjestelmän laajuinen. Se voidaan asettaa mistä tahansa Simrad-laitteesta, jossa on tämän toiminteen hallintamahdollisuus. Alue Muutos per painallus Oletusarvo Yksiköt Off 320 ft (Off 100 m) 1.6 5: 0.1 ft 5 10: 0.5 ft 10 50: 1 ft : 5 ft : 10 ft (0.5 5: 0.1 m) (5 10: 0.5 m) (10 50: 1 m) (50 100: 5 m) Off ft, m Tuulen muuttuminen (Käytössä ainoastaan Wind/Wind NAV moodin aikana) Tuulen muuttumisen hälytys valvoo tuulikulmaa. Viitekulma asetetaan kun hälytys aktivoidaan ja kun laite käynnistetään. Viitekulmaksi tulee sen hetken arvo jolloin tuulikulma on muutettu autopilottiin ja tuulen muuttumisen hälytys on aktivoitu. Tuulen muuttumisen näyttö esitetään Wind shift datasivulla. Se kertoo tuulikulman muuttumisesta todelliseen tuulensuuntaan nähden (maantieteellinen). Alue Muutos per painallus Oletusarvo Off, Hälytyksen tila Näyttää luettelon kaikista aktiivitilassa olevista hälytyksistä. Tietolähteiden asetukset Tietolähde voi olla anturi tai laite, joka on kytketty SimNet verkkoon ja joka toimittaa tietoa toisille SimNet Päämenu 51
.")
53 laitteille. Tietoa on monenlaista kuten kompassitieto, suhteellisen tuulen tieto, laskettu tuulitieto, syvyystieto jne. Tietyntyyppistä tietoa toimittaa vain yksi laite tai anturi toisille SimNet ryhmään järjestäytyneille laitteille (Katso Asennus/SimNet ryhmät, sivu 94). Alkukäynnistyksessä tietolähde valitaan automaattisesti SimNet ryhmän sisältä (SimNet Source Group) SimNetin oman prioriteettiluettelon mukaisesti. Jos tietolähde kytketään myöhemmin jo käynnissä olevaan järjestelmään, tämä tunnistetaan ja valitaan automaattisesti tietolähteeksi, ellei tälle tiedolle ole jo ennestään toimittajaa. SimNetin tietolähdeluettelon päivitys on tarpeen vain jos tietylle tietotyypille lisätään vaihtoehtoinen lähde, eikä tätä lähdettä ole valittu automaattisesti. Tietotyypit ja niiden vastaavat tietolähteet on lueteltu tuotteiden lähdesivulla (source page). Jos tietotyypille ei ole valittua lähdettä, laitteen nimen tai lyhenteen paikalla näkyy SimNet valitsee automaattisesti sijainti- ja navigointilähteen (Position and Navigation) samasta GPS/karttaplotterista. Jos haluat näiden olevan erillisiä, ne on valittava manuaalisesti. Automaattinen lähteen päivitys Auto select toiminne on lähinnä sellaisia tilanteita varten, joissa lähdevalinta on päivitettävä sen vuoksi, että valittu lähde ei enää pysty toimittamaan tietoa, tai se on fyysisesti korvattu toisella laitteella. Päivitystoiminne varmistaa, että tietolähdevalinnat ovat oikeat, ja se ylläpitää niitä. Puuttuvat tietolähteet etsitään automaattisesti tietotyypin "varalla olevasta" tietolähdeluettelosta, tai sitten valitaan korvaava lähde. Jos tietylle tietotyypille ei ole olemassa lähdettä, nimen tai lyhenteen paikalla lukee Päämenu






54 Jos tietylle tietotyypille on useampia lähteitä, toivottu lähde voidaan valita manuaalisesti. Manuaalinen lähteen valinta Tietolähteet voidaan myös valita manuaalisesti. Kaikki tietyntyyppistä tietoa jakavat laitteet löytyvät luettelosta. Korosta haluttu tietotyyppi ja paina nähdäksesi luettelon käytettävissä olevista laitteista. Vahvista korostetun laitteen valinta. Poistu tekemättä valintaa Katso valitun tietolähteen tietoja. Kalibroitavissa olevista tietotyypeistä ilmestyy aluksi päällysikkuna, joka kertoo valitun tietolähteen tiedot. Päämenu 53
 Katso luetteloa tietyntyyppisen")




55 Mene Calibrate/ Offset menuun. (Katso Asennus/Kalibrointi) Katso luetteloa tietyntyyppisen tiedon tietolähteistä. Näyttö Näyttöä voidaan säätää kahdella erikseen säädettävällä käyttöprofiililla. Profiilit ovat Päivä- ja Yö-profiili. Näyttöjen luettavuus molemmissa profiileissa voidaan optimoida eri valaistusolosuhteisiin ja voit nopeasti vaihdella näiden välillä käyttämällä PWR näppäintä ja softpainikkeita. Katso Taustavalaistus, sivu 9. Kummassakin profiilissa voit: - Säätää valaistustasoa - Valita valkoisen tai punaisen taustavalaistuksen - Kääntää näytön värit päinvastaiseksi - Säätää kontrastia 54 Päämenu
 Punainen (Yö) Negatiivinäyttö Kyllä/Ei - Ei Kontrasti 0-9 1 4")
56 Asetus Alue Muutos per painallus Oletusarvo Valoisuus Off Valon väri Valkoinen/ punainen - Valkoinen (päivä) Punainen (Yö) Negatiivinäyttö Kyllä/Ei - Ei Kontrasti Päämenu 55
 - English (englanti) - Español (espanja) - Français (ranska) - Italiano (italia) - Nederlands (hollanti) - Norsk (norja) - Svenska (ruotsi) Kielten nimet")
57 Kieli Kielen asetus tehdään autopilotin ensikäynnistyksessä. Katso Ensimmäinen käynnistys, sivu 63. Kielen voi kuitenkin muuttaa milloin tahansa. Kielivalinta on seuraava: - Deutsch (saksa) - English (englanti) - Español (espanja) - Français (ranska) - Italiano (italia) - Nederlands (hollanti) - Norsk (norja) - Svenska (ruotsi) Kielten nimet on lueteltu alkuperämaan kirjoitusasussa. Oletuskieli on englanti. 56 Päämenu


58 Mittayksiköt Parametri Veneen nopeus Tuulen nopeus Etäisyys, matka Syvyys Valinta kn km/h mph kn m/s mph nm km mi m ft Oletusarvo kn kn nm ft Suunta M T Lämpötila C F M F Näytön yksiköiden valinta ei ole pelkästään käyttäjän valittavissa. Jos halutaan tosisuuntaa mutta valittu kompassi on magneettikompassi, magneettinen erantotieto täytyy saada sijainnin tietolähteestä. Sama pätee jos käyttäjä haluaa nähdä magneettisen suunnan mutta saa tosisuunnan kompassilta. Jos magneettista erantotietoa tarvitaan mutta sitä ei saada, kompassi päättää, kumpaa yksikköä se käyttää. Päämenu 57

59 Merenkäynnin suodatin Merenkäynnin suodatinta käytetään rauhoittamaan peräsimen liikkeitä ja autopilotin herkkyyttä kovassa merenkäynnissä ja säässä. OFF: AUTO: MANUAL: Merenkäynnin suodatin on pois päältä. Tämä on oletusarvo. Rauhoittaa peräsimen liikkeitä ja autopilotin herkkyyttä kovassa merenkäynnissä ja säässä oppivaisesti. AUTO asennon käyttöä suositellaan, jos haluat käyttää Merenkäynnin suodatinta. Yhdistetty Response säädön asetuksiin Main menussa. Asentoa voidaan käyttää manuaalisesti etsimään optimaalinen yhdistelmä suunnan säilymisen ja peräsimen liikkeiden välillä, kun merenkäynti on kovaa mutta tasaista. Purjehtiminen Purjehtiminen (Sailing) löytyy menusta ainoastaan jos Boat type on asetettu Sail asentoon Asennusmenussa (katso sivu 65). 58 Päämenu
60 Purjehtiminen (Sailing) ruutuun voidaan pasta myös Tuuli moodin päänäytöltä painamalla peräkkäin MENUja WIND-näppäimiä 2 sekunnin sisällä. Luovin kesto Kun luovi suoritetaan WIND moodissa, käännösnopeus (luovin kestoika) on säädettävissä. Tämä antaa yksinpurjehtijalle aikaa käsitellä venettä ja purjeita luovin aikana. Käännös joka tehdään vaihtamatta tuulen puolta, suoritetaan myös hallitulla käännösnopeudella. Alue Muutos per painallus Oletusarvo Yksikkö s Luovikulma AUTO AUTO moodissa asetettu luovikulma korvaa vastaavat suunnanmuutokset mitkä tehtäisiin ohjauspainikkeilla oikealle ja vasempaan. Alue Muutos per painallus Oletusarvo Yksikkö Tuulitoiminne (Wind function) Kun Wind function on asetettu asentoon Auto, autopilotti valitsee automaattisesti ohjauksen suhteellisen tuulen tai todellisen tuulen ohjausmoodin välillä. Oletusarvo on 'Auto' ja sitä suositellaan matkapurjehdukseen. Kun venettä ajetaan myötätuuleen, se kiipeää myös aaltojen harjalle. Tästä saattaa aiheutua huomattavia nopeuden muutoksia, täten myös muutoksia suhteellisessä tuulikulmassa. Ohjausta todellisen tuulen mukaan käytetään tämän vuoksi myötätuulessa, kun taas vastatuulessa käytetään ohjausta suhteellisen tuulen mukaan. Päämenu 59
61 Suhteellisen tuulen mukaan (Apparent) ohjaus on suositeltavaa kun veneelle halutaan suurin mahdollinen nopeus. Autopilotti pyrkii säilyttämään suhteellisen tuulikulman vakiona, jotta purjeista saataisiin maksimiveto säädetyssä trimmissä. Kun purjehditaan suojaisilla vesillä, suhteellinen tuulikulma saattaa vaihdella puuskissa. Tällöin voi olla suositeltavampaa ohjata todellisen tuulikulman mukaan. Valitse True. Alue Auto Apparent - True Oletusarvo Auto VMG:n (maanopeuden) optimointi VMG:n optimointi tuulen suhteen alkaa toimia 5-10 minuuttia uuden tuulikulman asettamisen jälkeen, ja vain myötäseen ajettaessa. VMG symboli näkyy moodi-ilmaisimen alla, kun VMG:n optimointitoiminto on aktiivinen. Alue Off - On Oletusarvo Off Oikotieohjaus Oikotieohjaus on hyödyllinen menetelmä navigoidessa. Navigaattorin antama reittipoikkeama (Cross Track Error, XTE) pitää aluksen reittilinjalla. Jos navigaattorin antama XTE on enemmän kuin 0.15 nm, autopilotti laskee oikotien ja ohjaa aluksen kohti reittipistettä. XTE symboli näkyy moodi-ilmaisimen alla kun oikotieohjaus on aktiivinen (sivu 40). Alue On - Off Oletusarvo On 60 Päämenu
. Alue Oletusarvo Yksikkö 1 ja 10 1 2.")

62 Kurssin muuttaminen Käyttäessäsi (vasemmalle) tai (oikealle) painikkeita AUTO moodissa, muutat asetettua kurssia 1 asteen välein. Valitse 10 jos haluat tehdä suurempia 10 asteen kurssin muutoksia painikkeilla ja hienosäätää kurssia asetusnupista (ei koske purjeveneitä). Alue Oletusarvo Yksikkö 1 ja Kauko-ohjattu lukitus Kauko-ohjattu lukitus (Remote lock) toiminta on AP28- järjestelmään rakennettu turvallisuuspiirre. Se asettaa kaikki muut hallintalaitteet pois päältä. Kun kauko-ohjattu lukitus on käytössä, hallinnan siirtoa ei voida tehdä. Vain aktiivinen hallintayksikkö voi ohjata alusta. Kauko-ohjattu lukitus pannaan päälle seuraavasti: ikoni vaihtelee moodi- Aktiivisessa hallintalaitteessa indeksin kanssa. Päämenu 61
63 Lukitut järjestelmän hallintalaitteet näyttävät seuraavaa: Lukitustoiminta voidaan poistaa seuraavilla tavoilla: Aktiivinen hallintalaite vapauttaa muut yksiköt lukituksesta ja tekee niistä ei-aktiivisia: Järjestelmä voidaan sammuttaa (OFF) mistä tahansa hallintalaitteesta painamalla PWR painiketta 2-3 sekunnin ajan. 62 Päämenu







64 3 Asetukset asennuksen yhteydessä 3.1 Ensimmäinen käynnistys Ennen kuin AP28:ää käynnistetään ja tehdään ensimmäisiä asetuksia, laitteiden asennus ja sähköiset kytkennät on saatettava loppuun asennusohjeiden mukaisesti. Kun AP28 käynnistetään ensimmäistä kertaa, laitteisto käy läpi käynnistyksen alkutoimet, joiden aikana ruudulla näkyy: - Tuotteen nimi, sarjanumero, ohjelmistoversio, ohjelman päivämäärä - Kielen valinta - Automaattisten tietolähteiden valikoima PWR Näyttö kertoo, mitä asennuksessa on tehtävä ja mitä on jo tehty. Paina soft-painiketta jatkaaksesi asennusasetuksia seuraavien lukujen mukaisesti. Asetukset asennuksen yhteydessä 63

65 3.2 Asennusmenu Asennuksen asetukset on tehtävä osana AP28 järjestelmän käyttöönottoa. Jos tätä ei tehdä kunnolla, AP28 järjestelmä ei toimi oikein! Asennusmenuun päästään ainoastaan STBY moodissa. Asennuksen asetukset on ryhmitelty seuraaviin toimintakategorioihin: Käyttöönotto: Laituriasetukset ja merikoeajon asetukset Automaattiohjaus: Sallii ohjausperusparametrien tarkastelun ja muuttamisen (Katso myös vasteen säätäminen sivulla 15) Kalibrointi: Antureiden kalibrointi (myös osa käyttöönottoa) Veneen tyyppi: Valitse veneen tyyppi (myös osa käyttöönottoa) Työyksikkö: Työyksikkö asetukset (myös osa käyttöönottoa) SimNet-kokoonpano: SimNet-ryhmän asetukset Jokainen ryhmä on suunniteltu keskittymään tiettyihin asioihin ja sallii nopean pääsyn sellaisiin kohtiin, joissa täytyy tehdä muutoksia. Muutamia tärkeitä asioita koskien asennuksen asetuksia: Kun AP28 on toimitettu tehtaalta ja AINA KUN AUTOPILOTTI ON NOLLATTU (AUTOPILOT RESET), asennuksen asetukset ovat tehtaan aloitusarvoja (oletusarvoja). Automaattinen vuorovaikutteinen kehote tulee esiin (katso sivu 63), ja täydellinen asetus on suoritettava. 64 Asetukset asennuksen yhteydessä

66 Merikoeajon asetukset vaativat, että laituriasetukset on suoritettu onnistuneesti loppuun. Käyttöönotto Laituriasetukset Jos autopilottijärjestelmään ei ole asennettu peräsinkulma-anturia, katso virtuaalinen peräsinkulmaanturi sivuilta Seuraaviin menun kohtiin päästään ja ne voidaan asettaa laiturimenussa (Dockside menu): - Veneen tyyppi - Peräsinkulma-anturi - Virtuaalinen peräsinkulma-anturi - Työyksikön käyttöjännite - Työyksikön kytkin - Peräsintesti - Syvyyden kalibrointi - Minimi tuulikulma - Nav muutosraja Asetukset asennuksen yhteydessä 65
, Uppouma (Displacement), Purje (Sail) ja Perämoottori (Outboard).")
 mukaan.")

67 Veneen tyyppi Veneen tyypin valinta vaikuttaa kaikkiin ohjausparametreihin ja myös autopilotista saataviin toimintoihin. Vaihtoehdot ovat: Liukuva (Planing), Uppouma (Displacement), Purje (Sail) ja Perämoottori (Outboard). Valitse oikea veneen tyyppi (Boat type) käyttämällä Up ja Down painikkeita. Vahvista painamalla soft-painiketta. Peräsinkulma-anturin kalibrointi (Ei käytössä jos pilotti on configuroitu EVC:n (Electronic Vessel Control) mukaan. Katso sivu 115.) Varmistaudu, että laite on asennettu AC12/42 asennusohjekirjan mukaisesti. Peräsinkulman kalibrointi asettaa peräsimen fyysisen liikkeen ja peräsinkulman näytön oikeaan suhteeseen keskenään. Käännä käsin ruoria oikealle kunnes se tulee liikeratansa päähän. 66 Asetukset asennuksen yhteydessä
.")


68 Peräsinkulman oikea ääriasento on se kulma jota peräsinkulma-anturi näyttää ennen kuin säätöjä on tehty. Jos peräsimen todellinen kulma on muuta kuin mitä näyttö kertoo, korjaa näytön lukema Up/Down painikkeilla (katso huomautus). MENU Vahvista peräsinkulman oikean laidan kalibrointi painamalla MENU painiketta. Käännä käsin ruoria vasempaan kunnes se tulee liikeratansa päähän. Säädä näytön lukema samalla lailla kuin oikeanpuoleisessakin peräsinkulman säädössä. MENU Vahvista peräsinkulman vasemman laidan kalibrointi painamalla MENU painiketta. Monissa aluksissa on ±45 (90 laidasta laitaan) peräsinkulma vakiona. Jos et aio tehdä tähän oletusarvoon muutoksia, on sinun silti korostettava lukema ja vahvistettava se. Tämän on välttämätöntä Asetukset asennuksen yhteydessä 67

 Vie peräsin keskiasentoon ja vahvista.")
69 estämään peräsimen hakkaamista rajoittimiinsa. Peräsimen keskiasento voi vielä olla epätarkka. Sen nollaus on seuraavan menun aihe. Erikoistesti LF3000/LFI3000 Mk2 peräsinkulmaanturille 1 Säädä moottorit keskiasentoon, "peräsin keskelle" 2 Käytä moottoreita rpm ja huomioi peräsinkulmaosoittimen lukema autopilotissa. 2 muutos lukemassa on hyväksyttävä. 3 Jos kulma ylittää 2, kytke TB1 kaapelin (LFI3000) vaippa keskimmäiseen riviliittimeen ja toista vaihe 2 (Katso AC12/AC42 Asennusohje). Jos tämä tuo paremman tuloksen, pidä vaippa kytkettynä. Peräsimen nollaus (keskiasento) Vie peräsin keskiasentoon ja vahvista. Tämä korjaa mahdollisen väärän lukeman joka on aiheutunut peräsinkulman ilmaisimen väärästä kohdistamisesta. Paina Left palataksesi Laiturimenuun. Työyksikön jännite Aseta jännite oikeaksi. Valittavana on 12V tai 24V, valitse Työyksikölle oikea jännite. Katso työyksikön tiedot AC12/AC42 Asennusohjeesta. 68 Asetukset asennuksen yhteydessä



70 Työyksikön kytkimessä/ohivirtaussolenoidissa on sama jännite kuin työyksikössä. Ei ole mahdollista valita korkeampaa jännitettä kuin mikä sisäänsyöttöjännite on. Väärän jännitteen valitseminen voi vahingoittaa sekä työyksikköä että autopilotin tietokonetta. Tämä siitäkin huolimatta, että autopilotin suojauspiirit ovat toiminnassa. Työyksikön jännitteen valinta ei vaikuta jatkuvasti pyörivän pumpun solenoideihin. Solenoidien jännite on sama kuin järjestelmän syöttöjännite. Peräsintestin aikana AP28 järjestelmä päättelee automaattisesti toimiiko työyksikkö suuntaa vaihtavalla moottorilla vai onko se solenoidiventtiilikäyttöinen. Voimansiirto Voimansiirrossa on kaksi asetusta: Auto and Clutch. Kytkin (Clutch): Tämä on oletusarvo. Se sallii veneen ohjaamisen ruorista tai painonapein STBY moodissa. Tämä väylä aktivoituu (jännite kohoaa) kaikilla ohjaustavoilla, ja tyypillisesti Asetukset asennuksen yhteydessä 69
 mukaan. Katso sivu 115.")

71 sulkee ohitusventtiilin hydraulisessa lineaarityöyksikössä tai vetää kytkimen mekaanisessa työyksikössä. Auto: Tämä asento on tulevaisuuden käyttöä varten. Käytä aina asentoa Clutch oletusarvona. Peräsintesti (Ei käytössä jos pilotti on configuroitu EVC:n (Electronic Vessel Control) mukaan. Katso sivu 115.) Jos veneessä on tehostettu ohjaus, on tärkeää että moottori joka käyttää tehostinta, on päällä ennen testin aloittamista. Pysy selvästi erossa ruorista äläkä yritä ottaa manuaalista hallintaa siitä tämän testin aikana! Aseta ruori keskiasentoon ennen testin aloittamista. Autopilotin tietokone aloittaa muutaman sekunnin kuluttua testin aloittamisesta sarjan ruorikomentoja oikealle ja vasempaan vahvistaakseen peräsimen oikean asennon. Se tutkii minimivoiman mikä tarvitaan peräsimen kääntämiseen ja se alentaa sen liikenopeutta jos se ylittää autopilotin käyttämän maksiminorminopeuden (8 /s.). Peräsintesti näkyy näytöllä tekstinä Completed Rev. motor, Completed Solenoids, tai Failed. Jos Failed (epäonnistunut testi) ilmestyy, tutki sähköliitosten oikea kytkentä. Katso myös Hälytykset alkaen sivulta Asetukset asennuksen yhteydessä
. Katso kuvaa seuraavalla sivulla.")
72 Syvyyden kalibrointi Tämä säätö koskee ainoastaan "smart" kaikuantureita, jotka toimivat NMEA2000 formaatissa. Oletusarvo syyvyyden kalibroinniksi on 0.0, mikä ilmoittaa etäisyyden kaikuanturista merenpohjaan (b). Katso kuvaa seuraavalla sivulla. Tätä arvoa tulee suurentaa tai pienentää, riippuen halutaanko lukeman olevan vesilinjasta vai kölistä: - Negatiivinen korjausluku joka on yhtä suuri kuin etäisyys kaikuanturista kölin alareunaan antaa tulokseksi lukeman kölistä merenpohjaan (a) - Positiivinen korjausluku joka on yhtä suuri kuin etäisyys kaikuanturista vesilinjaan antaa tulokseksi lukeman vesilinjasta merenpohjaan (c) Asetukset asennuksen yhteydessä 71

73 Symboli syvyyslukeman edessä kertoo, että syvyys on mitattu: kölistä tai vesilinjasta Alue Muutos Oletusarvo Yksiköt ±5: : m, ft Paina MENU vahvistaaksesi korjausasetuksen. 72 Asetukset asennuksen yhteydessä
74 Minimi tuulikulma Minimi tuulikulma käytössä ainoastaan jos veneen tyypiksi on valittu `Sail Asennusmenussa. Minimi tuulikulma on pienin suhteellisen tuulen kulma mikä pitää purjeet vielä ryhdissä ja antaa hyväksyttävän vedon. Tämä parametri on venekohtainen. Minimi tuulikulma liittyy luovinestotoimintoon. Se liittyy myös tilanteesen missä autopilotti toimii Wind NAV moodissa. Voit valita erilaiset tuulikulmat oikealle ja vasemmalle puolelle. Näiden kulmien ero otetaan huomioon laskettaessa matkaa käännökseen (Distance To Turn, DTT). Alue Muutos per painallus Oletusarvo Yksiköt Nav muutosraja Jos vaadittava suunnanmuutos seuraavalle reittipisteelle Nav moodissa on asetettua rajaa suurempi, sinua pyydetään erikseen vahvistamaan tuleva suunnanmuutos. Tämä raja on säädettävissä. Asetukset asennuksen yhteydessä 73


75 Nav muutosraja (Nav change limit) -ruutuun voidaan päästä myös Nav moodin päänäytöltä painamalla peräkkäin MENU- ja NAV- näppäimiä 2 sekunnin sisällä. Alue Muutos per painallus Oletusarvo Yksiköt Laituriasetukset käyttäen virtuaalista peräsinkulman ilmaisinta Autopilotin tietokone mahdollistaa automaattiohjauksen myös ilman peräsinkulma-anturia. Tietokoneen virtuaalinen peräsinkulma-anturi toimii enintään 40- jalkaisille veneille ja vain perämoottori- tai sisäperäsovelluksille. Peräsinkulma-anturin asentaminen parantaa kuitenkin autopilotin suorituskykyä ja antaa näytölle tarkan osoituksen peräsimen asennosta. Peräsinkulma-anturi tulisi aina asentaa, ellei se ole epäkäytännöllistä tai mahdotonta. Autopilotti ohjelmoidaan virtuaaliselle peräsinkulmaanturille jos anturia ei löydy ensimmäisessä käynnistyksessä. Samoin kun autopilotti on resetoitu (Sivu 104). MENU 74 Asetukset asennuksen yhteydessä




76 soft- Valitse Laiturimenu ( Dockside ) ja paina painiketta vahvistaaksesi. Venetyyppi Kun autopilotti on ohjelmoitu virtuaaliselle peräsinkulmaanturille, venetyyppi asetetaan automaattisesti perämoottoriveneeksi (Outboard). Virtuaalisen anturin kalibrointi Virtuaalisen anturin kalibrointi syötetään numeerisena arvona joka vastaa fyysistä peräsimen todettua ääriasentoa. Käytä Up/Down painikkeita valitaksesi oikean arvon ja vahvista MENU. Katso sivut asettaaksesi työyksikön jännitteen ja voimansiirtotavan. Asetukset asennuksen yhteydessä 75
. Aktivoi automaattinen peräsintesti seuraavasti. Seuraa näytön ohjeita.")


77 Peräsintesti Virtuaalisen peräsinkulma-anturin testiä varten sinun on nähtävä vetolaitteiden tai moottoreiden liike ("peräsin"). Aktivoi automaattinen peräsintesti seuraavasti. Seuraa näytön ohjeita. Vahvista painamalla soft-painiketta. Seuraavaksi valitaan peräsimen liikkeen oikea suunta. >3 sec. Jos peräsin ei liiku suorittamaan käännöstä oikealle, paina soft-painiketta ja toista. Kun peräsin alkaa liikkua oikealle, vapauta painike ja paina soft-painiketta vahvistaaksesi. Seuraa näytön ohjeita. Kun peräsin on ääriasennossaan oikealla, käännä ruoria vain vähän vasempaan niin että hydraulipaine helpottaa. Vahvista painamalla soft-painiketta. 76 Asetukset asennuksen yhteydessä
 ilmestyy, tutki sähköliitosten oikea kytkentä. Katso myös Hälytykset alkaen sivulta 105.")
78 Toimi näytön ohjaamalla tavalla ja vapauta painike heti kun peräsin tavoittaa vasemman ääriasennon. Peräsin on nyt automaattisesti keskitetty. Peräsintesti on vahvistettu kun näytöllä näkyy Motor OK tai Failed. Jos Failed (epäonnistunut testi) ilmestyy, tutki sähköliitosten oikea kytkentä. Katso myös Hälytykset alkaen sivulta 105. Merikoeajo -asetukset Merikoajo-menu sisältää asetuksia ja automaattisia kalibrointeja, joita suoritetaan koeajon aikana. Merikoeajo tulee aina suorittaa avoimilla vesillä ja selvästi erossa muusta liikenteestä turvallisuuden vuoksi. Merikoeajo menu (Seatrial menu) tulee esille ainoastaan kun laituriasetukset on tehty loppuun ja ne on vahvistettu. Koeajon asetukset ovat: - Aseta peräsimen keskiasento (vahvistetaan laiturissa suoritettu säätö) - Kompassin kalibrointi (automaattinen veneen magneettisten häiröiden aiheuttaman eksymän kompensointi ja kompassin kiinteän virhenäyttämän (A-virheen) kompensointi) - Tuulen kalibrointi (jolla kompensoidaan tuulianturin kiinteä mekaaninen virheasento) - Veneen nopeuden kalibrointi Asetukset asennuksen yhteydessä 77
 ja se tulisi suorittaa tyynessä vedessä. Sivutuulta tai virtaa ei saisi olla.")

79 - Siirtymänopeus (nopeus, missä haluat vaihtaa ohjausparametrejä) - Automaattiviritys (menetelmä, jolla määritetään ohjausparametrejä) Peräsimen keskiasennon asetus Tämä säätö on laiturilla suoritetun säädön lopputarkistus (sivu 68) ja se tulisi suorittaa tyynessä vedessä. Sivutuulta tai virtaa ei saisi olla. - Aja vene matkanopeuteen ja suuntaa keula suoraan tuuleen - Jos veneessä on kaksi moottoria, synkronoi niiden käyntinopeudet (rpm) - Aseta trimmilevyt siten ettei niillä ole vaikutusta veneen suuntaan - Ohjaa venettä käsin vakaalla suunnalla - Jos tarvitaan, vahvista peräsimen keskiasento painamalla soft-painiketta 78 Asetukset asennuksen yhteydessä



80 Kompassin kalibrointi (eksymätaulukon määritys) Ennen kuin kompassin kalibrointi aloitetaan, varmistaudu siitä, että veneellä on tilaa suorittaa täyden ympyrän käännös. Kalibrointi tulee suorittaa tyynessä vedessä ja mahdollisimman vähäisessä tuulessa parhaan tuloksen saavuttamiseksi. Käytä täyden ympyrän tekemiseen sekuntia. 1. Korosta Calibrate rivi näytöllä 2. Aloita käännös oikealle tai vasempaan 3. Paina MENU aloittaksesi automaattisen kompassin kalibroinnin a. Tietoikkuna on esillä kertoen kalibroinnin edistymisestä. b. Numerot palkkinäytön alla näyttävät 0.0 kun käännöksen nopeus on oikea. Liian hidas tai liian nopea käännöksen nopeus ilmoitetaan näin: Asetukset asennuksen yhteydessä 79

81 Käännösnopeus liian suuri, käännös myötäpäivään Käännösnopeus liian pieni, käännös myötäpäivään 4. Automaattinen kalibrointi on suoritettu kun informaatioikkuna häviää näytöltä FC40 ja RC42kompassit taltioivat kalibroinnin ja eksymän tiedot omaan muistiinsa. Kalibroinnin aikana kompassi mittaa paikallisen magneettikentän suuruutta ja suuntaa. Jos paikallinen magneettikenttä on voimakkaampi kuin maan magneettikenttä (paikalliskentän lukema on yli 100%), kompassin kalibrointi ei onnistu. Jos paikalliskentän lukema on yli 30 %, katso, onko lähellä häiritseviä magneettisia esineitä ja poista ne, tai sitten kompassi on siirrettävä veneessä toiseen paikkaan. Paikallisen kentän suuntakulma viittaa häiritsevään magneettiseen objektiin. Katso kuvaa alla. 1 Kalibrointi tehdään kompassille, joka on aktiivinen autopilotin tietolähde. 2 Jos toisentyyppinen Simrad-kompassi tai toisen valmistajan kompassi asennetaan, katso sen kompassin ohjeita kalibroinnista. 80 Asetukset asennuksen yhteydessä

82 Keulaviiva Keulaviiva Paikallisen kentän osuus % maan magneettisesta kentästä. Paikalliskentän suuntima verrattuna kompassin keulaviivaan. Suuntima voi olla myös vastakulma. Tietyilä alueilla ja korkeilla latitudeilla paikallinen magneettikenttä tulee merkitykselliseksi. Erantovirheet saattavat ylittää arvon ±3. Asennuksen suuntavirheen kompensointi Kompassin kalibroinnin jälkeen ero kompassin keulaviivan ja aluksen pitkittäisakselin välillä on kompensoitava. 1 Etsi suuntima aluksesta näkyvään kohteeseen. Käytä karttaa tai karttaplotteria. 2 Ohjaa alus niin että sen keskilinja on sama kuin suuntima kohteeseen. 3 Säädä kompensointia siten että suuntima ja kompassin lukema ovat samat. Varmistaudu että kompassilukema ja suuntima kohteeseen ovat samoissa yksiköissä ( M tai T). 4 Vahvista kompensointi painamalla MENU painiketta Asetukset asennuksen yhteydessä 81



83 Tuulen kalibrointi Tämä kohta koskee vain tuulianturia joka on kytketty suoraan SimNetiin (IS12TW) tai anturia, jonka ulostulo on NMEA2000 formaatissa. Jäännösero suhteellisen tuulikulman näytössä korjataan manuaalisesti syöttämällä tarvittava kompensointi. Positiivinen arvo tarkoittaa korjausta oikealle, negatiivinen arvo korjausta vasempaan. Alue Muutos per painallus Oletusarvo Yksiköt Paina MENU vahvistaaksesi kompensoinnin. Veneen nopeuden kalibrointi Rungon muoto tai nopeusanturin sijainti saattavat aiheuttaa virheellisiä nopeuslukemia. Nopeustiedon kalibrointi saattaa olla tarpeen, jotta lokin nopeus- ja matkatiedot saadaan oikeiksi. 82 Asetukset asennuksen yhteydessä
84 Nopeus pohjan suhteen kalibrointi Kun järjestelmään on liitetty GPS, nopeus vedessä (Speed through water, SPD) voidaan kalibroida samaksi kuin nopeus pohjan suhteen (Speed Over Ground, SOG). Tämä kalibrointi tulisi tehdä tyynessä vedessä ja niin vähäisessä tuulessa ja virrassa kuin mahdollista. 1 Aja vene tasaiseen matkanopeuteen (yli 5 solmua) 2 Valitse Calibrate w/sog ja paina MENU painiketta 3 Paina uudestaan MENU vahvistaaksesi ja suorittaaksesi kalibroinnin 4 SPD korjauskerroin muutetaan sellaiseksi, että SOG ja SPD arvot ovat samat Nopeuden arvon manuaalinen säätö Jos nopeusmittari näyttää väärin, tätä voidaan säätää manuaalisesti. Aja veneellä tunnettu matka tasaisella nopeudella molempiin suuntiin ja ota nopeuslukemien keskiarvo. Tämä vähentää tuulen ja virran vaikutusta. Säädä sitten SPD korjauskerroin niin että saat oikean nopeusnäytön. Alue Muutos per painallus Oletusarvo Siirtymävaiheen nopeus (Transition HI-LO) Transition HI-LO on se nopeus, jossa AP28 vaihtaa automaattisesti ohjausparametrit HI:sta LO:hun, tai päinvastoin (katso sivu 14). Oletusarvo siirtymävaiheen nopeudeksi on 6 solmua. Moottoriveneissä siirtymävaiheen nopeudeksi suositellaan sitä nopeutta, missä vene nousee liukuun, tai missä hidas nopeus vaihtuu matkanopeudeksi. Purjeveneissä siirtymänopeus tulisi asettaa 3-4 solmuun jotta luovissa saataisiin paras vaste. Asetukset asennuksen yhteydessä 83

85 Automaattisen siirtymänopeus saadaan seuraavilla prioriteeteilla: 1 Nopeus veden suhteen saadan lokista. 2 Nopeus pohjan suhteen (Speed Over Ground, SOG) saadaan GPS/karttaplotterista. Katso myös sivu 14. Alue Muutos per painallus Oletusarvo Yksiköt OFF kn Automaattinen viritys Autotune on ominaisuus, joka asettaa automaattisesti tärkeimmät ohjausparametrit (Rudder ja Counter Rudder) ajamalla veneellä sarja S-käännöksiä. Niiden painoarvot asetetaan myös automaattisesti seurauksena laiturimenun venetyypin valinnasta. Automaattiviritystä ei välttämättä tarvita, sillä AP28:ään asennetut tehtaan oletusarvot toimivat useimmissa jalan kokoluokan veneissä. Suositeltava nopeus automaattiviritystä suoritettaessa on alle 10 solmua. Koeajo tulisi suorittaa tyynellä merellä tai korkeintaan kohtalaisessa merenkäynnissä, mieluummin suuntana itä tai länsi. Uppoumaveneissä tulee käyttää nopeutta joka on puolet normaalista matkanopeudesta. Siis jos matkanopeus on 10 solmua, suorita Autotune nopeudella 5 solmua. Autotunen aikana lasketuista parametreistä tulee HI parametrejä. LO-parametrit asetetaan automaattisesti 66 %:iin HI-arvoista. 84 Asetukset asennuksen yhteydessä




.")
.")
 Käyttöönoton tila (Commissioning status)")
86 Kun Autotune on suoritettu loppuun, ruoria on käytettävä manuaalisesti, sillä autopilotti on palannut STBY moodiin. Automaattinen viritystoiminto ottaa veneen hallinnan ja suorittaa sarjan S-käännöksiä. Nämä täytyy aina suorittaa avoimilla vesillä ja selvästi erossa muusta liikenteestä. Automaattinen viritystoiminto kestää noin 1-2 minuuttia. Voit pysäyttää Autotune-operaation painamalla STBY painiketta. Aktivoi Autotune painamalla soft-näppäintä. Autotunen jälken ei pitäisi olla tarvetta suorittaa muita säätöjä. Parametrien hienosäätöä suoritetaan vastesäädöllä (katso sivu 15). Näitä parametrejä voidaan tarkastella AUTO moodissa menemällä päämenussa kohtaan Asennus (Installation). Katso myös Recall Autotuned alempana. Käyttöönoton tila (Status) Käyttöönoton tila (Commissioning status) -ruutu näyttää vielä tehtävät ja jo tehdyt asennuskohteet. Palaa asennusmenun kohtaan Automatic steering jos haluat säätää ohjausparametrejä. Katso lisätietoja alta. Asetukset asennuksen yhteydessä 85


 Ohjausparametrejä voidaan tarkastella ja halutessa")
: HI parametrit ovat automaattiohjausta varten")
87 Automaattinen ohjaus Automatic steering menu sisältää ohjauksen parametrejä kompassiohjaukseen, tuuliohjaukseen ja navigointiohjaukseen. Recall autotuned (Kutsu viritystiedot) Jos haluat tarkastella Autotune toiminnon aikana saatujen parametrien arvoja, valitse Recall autotuned menusta Automatic Steering, ja paina. Vahvista painamalla soft-painiketta. Käsikäyttöinen viritys (Manual tuning) Ohjausparametrejä voidaan tarkastella ja halutessa muuttaa tämän menun alla. Parametrit on jaettu kahteen sarjaan (sivulla 17): HI parametrit ovat automaattiohjausta varten alhaisilla nopeuksilla ja purjeveneissä LO parametrit ovat automaattiohjausta varten suurilla nopeuksilla sekä purjeveneissä tuuleen ajettaessa tai myötäaallokossa 86 Asetukset asennuksen yhteydessä

88 Käsikäyttöinen viritys (Manual tuning) -ruutuun voidaan päästä myös Auto moodin päänäytöltä painamalla peräkkäin MENU- ja AUTO- näppäimiä 2 sekunnin sisällä. Vahvista painamalla soft-painiketta. Näytetty parametri Veneen tyyppi Uppouma & purje Liukuva & perämoott. Oma vene Autotune Käsisäätö Peräsin HI Vastaperäsin HI Autotrim HI 40 s 40 s Raja-arvo HI Peräsin LO Vastaperäsin LO Autotrim LO 40 s 40 s Raja-arvo LO Minimi peräsin Off Off Taulukon arvot ovat tehtaan oletusarvoja. Ne on luetteloitu vain informaation vuoksi. Kun olet suorittanut Autotunen, omat arvoisi voivat olla erilaiset. Katso myös Autotune aikaisemmin tässä luvussa. Asetukset asennuksen yhteydessä 87
89 Kaksi tärkeintä ominaisuutta jotka määrittelevät automaattiohjauksen suorituskyvyn ovat Rudder (peräsin) ja Counter Rudder (vastaperäsin). Rudder asettaa peräsinvahvistuksen, mikä tarkoittaa suhdetta ruorikulman ja suuntavirheen välillä. Liian vähän peräsintä Ohjaussuunta Liian paljon peräsintä Liian vähän peräsintä, ja autopilotti ei pysty pitämään ohjaussuuntaa vakaana Liian paljon peräsintä, ja ohjaus tulee mutkittelevaksi ja nopeus kärsii Hidas nopeus tarvitsee enemmän peräsintä kuin suuri nopeus Katso myös Minimiperäsin sivulta 89. Ohjaussuunta Counter Rudder (vastaperäsin) on parametri, joka toimii vastavoimana veneen kääntönopeuteen ja massavoimaan eli inertiaan. Se on lyhytaikainen peräsimen reagointi väärään ohjaussuuntaan. Se on peräsimen liikettä "yli" eli väärään suuntaan (vastaperäsin). Vastaperäsimen asetuksen voi tarkastaa käännöksen aikana. Seuraavat kuvat selventävät vastaperäsimen asetusta. Uusi suunta Vastaperäsimen asetus liian alhainen, "yliampuva" reagointi 88 Asetukset asennuksen yhteydessä
90 Uusi suunta Vastaperäsimen asetus liian korkea, hidas ja vetelä ohjausvaste Uusi suunta Vastaperäsimen asetus oikea, ihanteellinen ohjausvaste Autotrimin vakioasetus on 40 sekuntia, mikä toimii useimmissa veneissä hyvin. Peukalosääntö: Aseta sama määrä (sekuntia) kun veneen pituus on jaloissa. Veneissä jotka käyttävät VFR:ssä (virtuaalista peräsinkulma-anturia), Autotrimin asetuksen tulisi olla 20 sekuntia. Rate Limit (käännösnopeus) tulisi olla 6.0 /s, ellei jostain syystä tarvita nopeampaa kääntymistä. Minimum rudder (minimiperäsin) Joillain veneillä on taipumus reagoida huonosti peräsimen pieniin liikkeisiin. Tämä voi johtua peräsimen pienuudesta, pyörteisyydestä peräsinvirrassa tai veneessä on yksisuuttiminen vesisuihkupropulsio. Kun Minimum Rudder toiminto pannaan päälle, se saattaa parantaa joidenkin veneiden ohjattavuutta lisäämällä peräsimen liikkeitä. Aseta Minimum Rudder päälle (ON) merikokeissa ainoastaan, jo se osoittautuu paremmaksi suunnanpitäjäksi tyynellä merellä. Se tulisi asettaa päälle vasta kun Autotune on valmiiksi suoritettu ja mahdolliset peräsinparametrien hienosäädöt on suoritettu (katso sivu 88). Asetukset asennuksen yhteydessä 89

91 Alue Muutos per painallus Oletusarvo Units OFF OFF Lopullinen merikoeajo Kun kaikki Installation Menun asetukset on saatettu loppuun, vie vene merelle lopullista merikoeajoa varten. Se tulee suorittaa avoimilla vesillä ja tarpeeksi kaukana muusta liikenteestä. Aja venettä kaikilla pääsuunnilla AUTO moodilla Aloita alhaisilla ja keskisuurilla nopeuksilla, jotta pääset tutuksi AP28:n ohjausvasteen kanssa Varmista HI/LO siirtymisvaihe ja kokeile LO ja HI parametrien vaikutuksia (sivu 14) Kokeile vasteen säädön vaikutusta (Sivu 15) Kokeile U-käännöksiä Jos Non-Follow Up vipu- tai painonappiohjaus on käytössä, testaa moodien vaihtoa ja varmista vasemman ja oikeanpuoleisen ohjauskäskyn toimivuus Aseta reittipisteet jokaiselle järjestelmään kytketylle navigaattorille ja varmistaudu, että AP28 ohjaa NAV moodilla jokaisen tiedonlähteen mukaisesti Kokeile NoDrift (sortumatta reitillä) moodia Jos vene on purjevene, kytke WIND moodi ja kokeile AP28:ää erilaisilla suhteellisen tuulikulman asetuksilla. Kokeile myös WINDN(av) moodia sekä optimoituja 90 Asetukset asennuksen yhteydessä
92 VMG ja WCV käyttötapoja kun purjehditaan (tai luovitaan) kohti reittipistettä. Jos peräsinvaste tuntuu ärhäkältä merikokeiden aikana, voit vähentää peräsimen liikenopeutta saadaksesi pehmeämmän ohjauksen. Vaihtoehtoisesti purjeveneessä voit lisätä peräsimen nopeutta ajettaessa myötäaallokkoon. Säätö "motor Drive out" (sivu 92) voidaan asettaa yllä oleva mielessä. Älä säädä enempää kuin 10 % kerrallaan sen perusteella mitä automaattisten peräsintestien tuloksena saatiin (sivu 70). Suorita aina uusi Autotune säädön jälkeen Veneen omistajalle on annettava käyttökoulutus Omistajan käyttökoulutus Omistajalle pitäisi antaa peruskoulutus laitteiston käytöstä, kuten: Laitteiston asetus päälle ja pois päältä Moodien vaihtaminen. Selosta lyhyesti mitä tapahtuu, kun vaihdetaan moodilta toiseen Manuaalisen ohjauksen palautus kaikista moodeista. Selosta, missä moodeissa autopilotti ottaa ruorin hallinnan Hallinnan ottaminen ei-aktiivisista asemista Lukitusmoodin käyttö. Miten lukitaan ja lukitus avataan. Miten järjestelmä sammutetaan lukitusta asemasta. Non-Follow-Up ja Follow-Up ohjausmoodien erilaisuuden oppiminen ja niiden käyttö Non-Follow-up hallintalaitteiden käyttö (mikäli käytössä) Suunnanmuutos painikkeilla ja kierrettävällä nupilla Liikkuminen päämenussa (Main menu) ja alamenuissa. Miten asetuksia muutetaan ja miksi muutetaan Asetukset asennuksen yhteydessä 91
 Kompassien sijainti ja magneettisten häiriötekijöiden pitäminen pois niiden läheisyydestä")
.")
 on tarvittava maksimiteho joka tarvitaan saamaan peräsimen oikea kääntönopeus automaattiohjauksessa (NFU moodissa käytetään")
93 Miten valitaan vaihtoehtoisia tietolähteitä ohjaussuunnalle (kompassi), navigoinnille (GPS), karttaplotterille, nopeudelle, syvyydelle jne. Erojen ymmärtäminen NAV moodin ja NoDrift moodin välillä ja niiden tietolähteet (Nav, Pos) Kompassien sijainti ja magneettisten häiriötekijöiden pitäminen pois niiden läheisyydestä Automaattisulakkeen sijainti ja erillisen SimNetautomaattisulakkeen sijainti (jos on) Kalibrointi Kalibrointi on joukko toimenpiteitä, jotka kattavat kompassin, peräsinkulma-anturin, syvyyden, suhteellisen tuulikulman ja veneen nopeuden. Näistä toimenpiteistä kerrotaan luvussa Käyttöönotto (Commissioning). Peräsimen työyksikkö (Rudder drive) Alamenun kohdat Rudder drive alla kuuluvat käyttöönottoon, paitsi moottorin teho ja peräsimen kuollut alue (Rudder deadband). Moottorin teho The Motor output (esitetään prosentteina) on tarvittava maksimiteho joka tarvitaan saamaan peräsimen oikea kääntönopeus automaattiohjauksessa (NFU moodissa käytetään maksiminopeutta). Tämä asetus sallii sinun säätävän peräsimen kääntönopeuden toiseksi minkä automatiikka asetti peräsintestissä. 92 Asetukset asennuksen yhteydessä

94 Peräsimen kuollut alue Peräsimen kuolleen alueen toiminta on sopeutuvaa ja se toimii jatkuvasti. Se estää ruoria "sahaamasta", ja sen sopeutuva toiminta optimoi kuolleen alueen veneen nopeuden ja peräsimen paineen mukaan. Jos asetustila "Auto" ei toimi toivotusti joko peräsimen massahitauden tai ohjausvälityksen väljyyden vuoksi, sitä voidaan säätää myös käsin. Etsi alhaisin arvo mikä estää ruorin "sahaamisen". Laaja kuollut alue aiheuttaa epätarkan ohjauksen. On suositeltavaa tutkia peräsimen stabiliteetti AUTO moodissa ja veneen liikkuessa. Tällöin peräsimeen kohdistuu painetta. Alue Muutos per painallus Oletusarvo Yksiköt AUTO, AUTO Peräsimen kuolleen alueen asetus ei ole voimassa kun autopilotti käyttää virtuaalista peräsinkulma-anturia ("Virtual feedback). SimNet kokoonpano SimNet-yksiköt on jaettu ryhmiin. Jokaiselle yksikölle on annettu järjestysnumero tunnistusta varten. Asetukset asennuksen yhteydessä 93

95 SimNet ryhmät SimNet-ryhmityksen tarkoituksena on hallita parametriasetuksia ryhmittäin. Toimintaa käytetään suuremmissa aluksissa, missä useita yksiköitä on saatettu toimimaan SimNet-verkostossa. Liittämällä useita laitteita samaan ryhmään, yhden laitteen parametrien päivittäminen vaikuttaa samalla lailla muihin verkossa oleviin jäseniin. Asetus Alue Oletusarvo Näyttö Simrad, Ei mitään, 1-6 Simrad Lähteet Simrad, Ei mitään Simrad Yksiköt Simrad, Ei mitään, 1-6 Simrad Kieli Simrad, Ei mitään, 1-6 Simrad Vaimennus Simrad, Ei mitään, 1-6 Simrad Hälytykset Simrad, Ei mitään, 1-6 Simrad - Simrad: Oletusarvoryhmä AP28:lle - Ei mitään: Ei nimetty ryhmään - 1 6: Ryhmien numerot 94 Asetukset asennuksen yhteydessä
96 Seuraavan sivun kuvat näyttävät, miten flybridgen ja ohjaamon laitteilla on eri kieli, vaimennuksen ja taustavalon ryhmä, ja kuinka tämä vaikuttaa eri laitteiden asetuksiin. KIELI = EI MITÄÄN FLYBRIDGE NÄYTTÖ = 1 VAIMENNUS = 1 OHJAAMO NÄYTTÖ = 2 Asetukset asennuksen yhteydessä 95

 sisältää Service (huolto) alamenun, jossa päästään useisiin mahdollisuuksiin näyttää dataa järjestelmää testatessa tai vikaa")
97 Järjestysnumero Järjestysnumeroa käytetään erottamaan toisistaan samanmalliset laitteet, kun ne on kytketty SimNet- tai NMEA2000-verkostoon. Järjestysnumero lisätään tuotteen nimeen, esim. AP28-1, AP28-2 helppoa tunnistettavuutta varten. Alue Askel Oletusarvo Huoltotietoutta Katso myös Vianetsintä (Trouble shooting) sivu 103, aiheet SimNet-tila, Järjestestelmän data ja resetoinnit. Main menu (päämenu) sisältää Service (huolto) alamenun, jossa päästään useisiin mahdollisuuksiin näyttää dataa järjestelmää testatessa tai vikaa etsittäessä. 96 Asetukset asennuksen yhteydessä



98 Demo Autopilotti sisältää demo-moodin, mikä on hyödyllinen laitteen esittelyssä ja siihen tutustuttaessa. Kaikkea datasivuilla näytettävä dataa voidaan simuloida. Vahvista demo-moodi painamalla soft-painiketta. Jos laite sammutetaan demo-moodissa, se myös jatkaa siitä seuraavan kerran käynnistettäessä. Demo-moodista poistutaan menun kautta yllä olevan kuvan mukaisesti. Automaattinen tietolähteiden päivitys käynnistyy. Käyttäjää muistutetaan DEMO tekstillä sekunnin välein kun demo on käytössä. Jotta autopilotin demosta saadaan kaikki hyöty, autopilotin tietokoneenkin täytyy olla mukana demo-toiminnassa. Asetukset asennuksen yhteydessä 97

99 About AP28 About AP28 menu kertoo autopilotin mallin, sarjanumeron, ohjelmistoversion numeron ja julkaisupäivämäärän. Tässä näkyvät tiedot ovat vain mallina! 98 Asetukset asennuksen yhteydessä


100 4 Hälytysjärjestelmä 4.1 Hälytysilmoitus AP28 autopilotin hälytysjärjestelmä käynnistyy jos mikä tahansa hälytyksen asetettu arvo ylittyy. Katso Hälytykset, sivu 50. Kun hälytyksen aihe ilmaantuu, hälytys ilmoitetaan tekstillä ALARM ja hälytysäänellä. Erilaiset hälytysilmoitukset on lueteltu alla olevassa taulussa. Hälytystyyppi Ääni Valo Muistutusväli Elintärkeä hälytys Tärkeä hälytys Vakiohälytys 2 vaihtuvaa ääntä Vilkkuu päälle/ pois 10 s 20 s 40 s Varoitus Yksi piippaus 60 s Kevyt varoitus Yksi piippaus Jos AP28 on kytketty toisiin SimNet-yksiköihin, mikä tahansa hälytys järjestelmässä näkyy hallintayksikössä. Jos hälytystä ei ilmoiteta selkokielisenä tekstinä, näytetään hälytyksen koodi. Katso Hälytysten koodit, sivu 100. Hälytysjärjestelmä 99
 kaikista yksiköistä, jotka kuuluvat samaan ryhmään.")


101 4.2 Hälytyksen kuittaus Hälytys kuitataan painamalla mitä tahansa painiketta. Tämä poistaa hälytysilmoituksen (teksti, valo ja äänimerkki) kaikista yksiköistä, jotka kuuluvat samaan ryhmään. Katso SimNet ryhmät, sivu 94. Muistutus tulee näkyvin tietyin väliajoin niin kauan kuin hälytyksen syy on olemassa. Muista SimNet-yksiköistä tulleen hälytyksen syy pitää korjata hälytyksen lähettäneessä yksikössä! 4.3 Aktiivisten hälytysten tarkastelu Ajantasaista luetteloa hälytystilanteesta voidaan tarkastella milloin vain. 4.4 Hälytysten koodit Jos hälytysteksti on saatavilla muilta SimNet verkoon kytketyiltä laitteilta, näkyy teksti ruudussa. Jollei tekstiä saada, ilmestyy hälytyskoodi. Koodiluettelo on seuraavalla sivulla. 100 Hälytysjärjestelmä
102 Hälytyksen koodi Hälytys 10 Matala vesi 11 Syvä vesi 12 Ankkurointihälytys 13 Tuulen muuttumisen 14 Tuulen tosinopeus liian kova 15 Tuulen tosinopeus liian hiljainen 16 Veneen nopeus liian alhainen 17 Jännite liian korkea 18 Jännite liian alhainen 19 Syvyystieto puuttuu 20 Tuulitieto puuttuu 21 Navigointitiedot puuttuvat 22 Kompassitieto puuttuu 23 Poikkeama suunnasta 24 Peräsinkulmatieto puuttuu (RF25) 25 Peräsinkulma-anturi epäkunnossa (RF300) 26 Peräsinvasteen vika 27 Työyksikön ylikuormitus 28 Lämpötila korkea 29 Ohivirtauksen/kytkimen ylikuormitus 30 Ohivirtaus/kytkin pois päältä 31 Korkea syöttöjännite 32 Matala syöttöjännite 33 Ei-aktiivinen hallintalaite 34 Ei autopilotin tietokonetta 35 ACXX muistivika 36 Ei kytkentää EVC-järjestelmään 37 EVC:n ohiohjaus Hälytysjärjestelmä 101
103 Hälytyksen koodi Hälytys 56 Peräsinkulma (RF) on kalibroitava 102 Hälytysjärjestelmä






104 5 Vianetsintä Autopilotti on monimutkainen järjestelmä. Sen suorituskyky riippuu kunnollisesta asennuksesta ja onnistuneesta koeajosta merellä. Main menussa on luku Service. Tästä päästään useisiin mahdollisuuksiin näyttää dataa, kun testataan tai etsitään vikaa järjestelmästä. 5.1 SimNet status SimNet status ruutu antaa tilannetiedotteen erilaisista järjestelmän lähettämistä SimNet-sanomista. 5.2 System data System data ruutu antaa tilanneinformaatiota erilaisista sanomista, joita järjestelmä lähettää. Vianetsintä 103






105 5.3 Resetoinnit Autopilotin resetointi (tehdasasetukset) Autopilotin resetointi on osa tehtaalla suoritettavaa lopputestiä, jossa muistit asetetaan (resetoidaan) tehdasasetuksiksi. Ellei ole tarvetta nollata kaikki asennuksen yhteydessä suoritetut asetukset, autopilotin resetointia ei pitäisi suorittaa. soft- Vahvistaaksesi autopilotin resetoinnin paina painiketta. Asennuksen asetusten toimenpiteet on suoritettava uudelleen mikäli autopilotti on resetoitu! Jos autopilotti on resetoitu, katso luku 3.2. Järjestelmän resetointi Koko järjestelmän resetointi (Global reset) resetoi koko SimNet-järjestelmän Simrad-ryhmässä ja aloittaa uuden automaattisen järjestelmän luomisen. Katso luku Vianetsintä
Käyttäjän ohjekirja. Simrad AP24 Autopilotti
 Käyttäjän ohjekirja Simrad AP24 Autopilotti Suomi Sw.1.2 www.simrad-yachting.com A brand by Navico - Leader in Marine Electronics A P 2 4 Dokumentti Käyttäjän ohjekirja Simrad AP24 Autopilotti Suomi no.:
Käyttäjän ohjekirja Simrad AP24 Autopilotti Suomi Sw.1.2 www.simrad-yachting.com A brand by Navico - Leader in Marine Electronics A P 2 4 Dokumentti Käyttäjän ohjekirja Simrad AP24 Autopilotti Suomi no.:
Käyttäjän ohjekirja. Simrad AP28 Autopilotti
 Käyttäjän ohjekirja Simrad AP28 Autopilotti Suomi Sw.1.3 www.simrad-yachting.com A brand by Navico - Leader in Marine Electronics Tästä käsikirjasta Rev. A 06.11.07 Ensimmäinen laitos Rev. B 25.03.08 Follow
Käyttäjän ohjekirja Simrad AP28 Autopilotti Suomi Sw.1.3 www.simrad-yachting.com A brand by Navico - Leader in Marine Electronics Tästä käsikirjasta Rev. A 06.11.07 Ensimmäinen laitos Rev. B 25.03.08 Follow
Ohjelmoitava magneettivastuksellinen kuntopyörä. LCD-Näyttö BC-81295
 Ohjelmoitava magneettivastuksellinen kuntopyörä LCD-Näyttö BC-81295 Yhteenveto Tämä on tarkoitettu ainoastaan ohjelmoitavaan magneettivastukselliseen kuntopyörään. Järjestelmään kuuluu kolme (3) osaa:
Ohjelmoitava magneettivastuksellinen kuntopyörä LCD-Näyttö BC-81295 Yhteenveto Tämä on tarkoitettu ainoastaan ohjelmoitavaan magneettivastukselliseen kuntopyörään. Järjestelmään kuuluu kolme (3) osaa:
GO XSE Pikaopas. Etupaneeli. Järjestelmäasetukset-valintaikkuna. Nro Näppäin Toiminto
 GO XSE Pikaopas FI Etupaneeli 1 Nro Näppäin Toiminto 1 Virta Jos painiketta painetaan kerran, näyttöön avautuu Järjestelmäasetukset-valintaikkuna. Käynnistä tai sammuta yksikkö painamalla tätä painiketta
GO XSE Pikaopas FI Etupaneeli 1 Nro Näppäin Toiminto 1 Virta Jos painiketta painetaan kerran, näyttöön avautuu Järjestelmäasetukset-valintaikkuna. Käynnistä tai sammuta yksikkö painamalla tätä painiketta
Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla.
 Speedohealer V4 Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla. 1. Esipuhe Onnittelemme sinua Speedohealer laitteen oston johdosta. HealTech Electronics Ltd. on omistautunut
Speedohealer V4 Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla. 1. Esipuhe Onnittelemme sinua Speedohealer laitteen oston johdosta. HealTech Electronics Ltd. on omistautunut
Johdanto. 1 Johdanto Elite-3x. Aloitus. Painikkeet ja säätimet
 Johdanto Painikkeet ja säätimet VIRTA, TAUSTAVALO: Virta päälle/ pois ja taustavalon taso Nuolinäppäin: Tällä ohjataan kohdistinta ja valitaan valikoiden vaihtoehtoja Taajuus: Tällä painikkeella valitaan
Johdanto Painikkeet ja säätimet VIRTA, TAUSTAVALO: Virta päälle/ pois ja taustavalon taso Nuolinäppäin: Tällä ohjataan kohdistinta ja valitaan valikoiden vaihtoehtoja Taajuus: Tällä painikkeella valitaan
GO XSE Pikaohje. Etupaneeli. Järjestelmäasetukset-valintaikkuna. Nro Näppäin Toiminto
 GO XSE Pikaohje FI Etupaneeli 1 Nro Näppäin Toiminto 1 Virta Käynnistä tai sammuta yksikkö painamalla tätä painiketta pitkään. Jos painiketta painetaan kerran, näyttöön avautuu Järjestelmäasetukset-valintaikkuna.
GO XSE Pikaohje FI Etupaneeli 1 Nro Näppäin Toiminto 1 Virta Käynnistä tai sammuta yksikkö painamalla tätä painiketta pitkään. Jos painiketta painetaan kerran, näyttöön avautuu Järjestelmäasetukset-valintaikkuna.
Käyttöohje, ohjauspaneeli Balboa TP600
 Käyttöohje, ohjauspaneeli Balboa TP600 Tälle ohjauspaneelille on mahdollista saada wifi-ohjaus, kysy lisää huolto@allastarvike.fi Näppäimien nimet voivat vaihdella valmistajan ja mallin mukaan. Altaan
Käyttöohje, ohjauspaneeli Balboa TP600 Tälle ohjauspaneelille on mahdollista saada wifi-ohjaus, kysy lisää huolto@allastarvike.fi Näppäimien nimet voivat vaihdella valmistajan ja mallin mukaan. Altaan
Käyttöohje EMT757 / 3567 Ohjelmoitava digitaalinen kellokytkin
 Käyttöohje EMT757 / 3567 Ohjelmoitava digitaalinen kellokytkin A. Toiminnot 1. Käytetään päällä/pois -aikojen asettamiseen, säätämään erilaisia aikajaksoja virran päälläololle. Toimii erilaisten laitteiden
Käyttöohje EMT757 / 3567 Ohjelmoitava digitaalinen kellokytkin A. Toiminnot 1. Käytetään päällä/pois -aikojen asettamiseen, säätämään erilaisia aikajaksoja virran päälläololle. Toimii erilaisten laitteiden
P6SLite ohjaus- ja zoom komennot
 1, Ohjaus zoom -toiminnot P6SLite ohjaus- ja zoom komennot Osa 1 pikanäppäintoiminnon Valitse APP-käyttöliittymää ja APP ilmestyy toimintopainikkeeseen. Paina + = ZOOM +, paina - = ZOOM-. 2, Manuaalinen
1, Ohjaus zoom -toiminnot P6SLite ohjaus- ja zoom komennot Osa 1 pikanäppäintoiminnon Valitse APP-käyttöliittymää ja APP ilmestyy toimintopainikkeeseen. Paina + = ZOOM +, paina - = ZOOM-. 2, Manuaalinen
High Definition Car DVR X109
 High Definition Car DVR X109 Ohjekirja Kameran kaaviokuva Painiketoiminnot Kamerassa samoilla näppäimillä on useita eri toimintoja riippuen valikosta. Alla on käyty näppäimet ja niiden toiminnot läpi.
High Definition Car DVR X109 Ohjekirja Kameran kaaviokuva Painiketoiminnot Kamerassa samoilla näppäimillä on useita eri toimintoja riippuen valikosta. Alla on käyty näppäimet ja niiden toiminnot läpi.
YLEISTÄ ALOITUS. Laitteen kuvaus. Näytön kuvaus. Laitteen käynnistäminen ja sammuttaminen UP = YLÖS DOWN = ALAS BACK = TAKAISIN
 WT6 Pikaopas YLEISTÄ Laitteen kuvaus UP = YLÖS DOWN = ALAS BACK = TAKAISIN Näytön kuvaus 1. Väylän numero 2. Vasen/oikea greeninäkymä 3. Väylän Par-luku 4. Matka greenin taakse 5. Matka greenin eteen 6.
WT6 Pikaopas YLEISTÄ Laitteen kuvaus UP = YLÖS DOWN = ALAS BACK = TAKAISIN Näytön kuvaus 1. Väylän numero 2. Vasen/oikea greeninäkymä 3. Väylän Par-luku 4. Matka greenin taakse 5. Matka greenin eteen 6.
Käyttäjän käsikirja WTN radiomajakka. Version: FIN180427
 Version: FIN180427 Käyttäjän 1 käsikirja Sisällys 1 WTN-Radiomajakka Näytöt ja näppäimet... 3 2 Käynnistys ja toiminta-aika... 4 2.1 WTN-laitteen käynnistys... 4 2.2 WTN-laitteen sammutus... 4 2.3 Virransyöttö:...
Version: FIN180427 Käyttäjän 1 käsikirja Sisällys 1 WTN-Radiomajakka Näytöt ja näppäimet... 3 2 Käynnistys ja toiminta-aika... 4 2.1 WTN-laitteen käynnistys... 4 2.2 WTN-laitteen sammutus... 4 2.3 Virransyöttö:...
ABT PÖYTÄVAAKA PAKVAAKA1
 ABT PÖYTÄVAAKA PAKVAAKA1 SISÄLLYSLUETTELO 1. Toiminnot 3 2. Asennus 3 3. Varotoimenpiteet 3 4. LCD-näyttö 4 5. Näppäimet 5 6. Toimintojen asettaminen 5 7. Punnitusyksikön vaihtaminen 6 8. Vikakoodit 7
ABT PÖYTÄVAAKA PAKVAAKA1 SISÄLLYSLUETTELO 1. Toiminnot 3 2. Asennus 3 3. Varotoimenpiteet 3 4. LCD-näyttö 4 5. Näppäimet 5 6. Toimintojen asettaminen 5 7. Punnitusyksikön vaihtaminen 6 8. Vikakoodit 7
Riistakameran käyttöohje
 Riistakameran käyttöohje Sisällysluettelo I. Pikakäyttöönotto... 2 1. Etupaneeli... 2 2. Alaosa ja virtakytkin... 3 Automaattinen infrapunakuvaustila... 3 Testitila... 3 Liitännät... 3 3. Patterin asettaminen...
Riistakameran käyttöohje Sisällysluettelo I. Pikakäyttöönotto... 2 1. Etupaneeli... 2 2. Alaosa ja virtakytkin... 3 Automaattinen infrapunakuvaustila... 3 Testitila... 3 Liitännät... 3 3. Patterin asettaminen...
KÄYTTÖOHJE LÄMPÖTILA-ANEMOMETRI DT-619
 KÄYTTÖOHJE LÄMPÖTILA-ANEMOMETRI DT-619 2007 S&A MATINTUPA 1. ILMAVIRTAUKSEN MITTAUS Suora, 1:n pisteen mittaus a) Kytke mittalaitteeseen virta. b) Paina UNITS - näppäintä ja valitse haluttu mittayksikkö
KÄYTTÖOHJE LÄMPÖTILA-ANEMOMETRI DT-619 2007 S&A MATINTUPA 1. ILMAVIRTAUKSEN MITTAUS Suora, 1:n pisteen mittaus a) Kytke mittalaitteeseen virta. b) Paina UNITS - näppäintä ja valitse haluttu mittayksikkö
Pikaohje Aplisens APIS type 1X0 ja 2XO
 Pikaohje Aplisens APIS type 1X0 ja 2XO Koivupuistontie 26, 01510, Vantaa www.saato.fi, sales@saato.fi, 09-759 7850 Sisällys 1. Yleistä...3 2. Parametritilan toiminnot...4 3. Käyttöönotto pikaohje...5 1.
Pikaohje Aplisens APIS type 1X0 ja 2XO Koivupuistontie 26, 01510, Vantaa www.saato.fi, sales@saato.fi, 09-759 7850 Sisällys 1. Yleistä...3 2. Parametritilan toiminnot...4 3. Käyttöönotto pikaohje...5 1.
KOSTEUSLÄHETTIMET RHT
 KOSTEUSLÄHETTIMET RHT KÄYTTÖOHJE RHT KÄYTTÖOHJE Tämä dokumentti sisältää tietoa kosketusnäytöllisen RHT-kosteuslähettimen käyttöönotosta. Ennen kuin aloitat, varmista että lähetin on asennettu asennusohjeiden
KOSTEUSLÄHETTIMET RHT KÄYTTÖOHJE RHT KÄYTTÖOHJE Tämä dokumentti sisältää tietoa kosketusnäytöllisen RHT-kosteuslähettimen käyttöönotosta. Ennen kuin aloitat, varmista että lähetin on asennettu asennusohjeiden
DIMLITE Single. Sähkönumero Käyttöohje
 DIMLITE Single Sähkönumero 2604220 Käyttöohje T1 sisääntulo T1 sisääntulo Yksittäispainikeohjaus Nopea painallus T1 painikkeesta sytyttää valaistuksen viimeisimmäksi aseteltuun tilannearvoon. Toinen lyhyt
DIMLITE Single Sähkönumero 2604220 Käyttöohje T1 sisääntulo T1 sisääntulo Yksittäispainikeohjaus Nopea painallus T1 painikkeesta sytyttää valaistuksen viimeisimmäksi aseteltuun tilannearvoon. Toinen lyhyt
OHJELMOINTILAITE 10/50
 OHJELMOINTILAITE 10/50 1 2 3 4 5 6 17 16 15 7 14 8 13 12 11 10 9 1) Näyttö 1 taivutuksen nro. 2) Näyttö 2 kulma 3) LED merkkivalo MANUAALI 4) OFF-SET. 5) Taivutussuunta. 6) Palautus 7) Käynnistys ja resetointi.
OHJELMOINTILAITE 10/50 1 2 3 4 5 6 17 16 15 7 14 8 13 12 11 10 9 1) Näyttö 1 taivutuksen nro. 2) Näyttö 2 kulma 3) LED merkkivalo MANUAALI 4) OFF-SET. 5) Taivutussuunta. 6) Palautus 7) Käynnistys ja resetointi.
PIKAKÄYTTÖOHJE V S&A Matintupa
 PIKAKÄYTTÖOHJE V1.0 2007 S&A Matintupa MITTALAITE; PAINIKKEET, PORTIT, OSAT PAIKALLINEN portti (local, L) PÄÄPORTTI (master, M) LCD NÄYTTÖ PÄÄTETUNNISTIN VIRTAKYTKIN FUNKTIONÄPPÄIN Jännitteen syöttö VAHVISTUS/
PIKAKÄYTTÖOHJE V1.0 2007 S&A Matintupa MITTALAITE; PAINIKKEET, PORTIT, OSAT PAIKALLINEN portti (local, L) PÄÄPORTTI (master, M) LCD NÄYTTÖ PÄÄTETUNNISTIN VIRTAKYTKIN FUNKTIONÄPPÄIN Jännitteen syöttö VAHVISTUS/
Rider 40 Rider 40:ssä on neljä näppäintä, joita käytetään useisiin eri tarkoituksiin.
 40 Pikaopas Rider 40 Rider 40:ssä on neljä näppäintä, joita käytetään useisiin eri tarkoituksiin. Näppäintoiminnot 2 1 Lämmittely Kohde Min Kesto lyöntiä /min Maks min 2 3 4 Lisävarusteet Rider 40:n toimitukseen
40 Pikaopas Rider 40 Rider 40:ssä on neljä näppäintä, joita käytetään useisiin eri tarkoituksiin. Näppäintoiminnot 2 1 Lämmittely Kohde Min Kesto lyöntiä /min Maks min 2 3 4 Lisävarusteet Rider 40:n toimitukseen
CROSSTRAINER (Model E 7000P)
") CROSSTRAINER (Model E 7000P) Kuva 1 Poista pultit (C4) tiivisterenkaat (C5) ja mutterit (C6) takavakaajasta (C). Laita kaksi pulttia (C4) takavakaajan läpi, kiinnittääksesi kannattimen laitteeseen (A),
CROSSTRAINER (Model E 7000P) Kuva 1 Poista pultit (C4) tiivisterenkaat (C5) ja mutterit (C6) takavakaajasta (C). Laita kaksi pulttia (C4) takavakaajan läpi, kiinnittääksesi kannattimen laitteeseen (A),
FullHD herätyskello-valvontakamera
 FullHD herätyskello-valvontakamera Käyttöohje Ajan asetus Kun kellonaika on näytössä paina SET, näytöllä näkyy nyt vuosi aseta oikea aika UP ja DOWNnäppäimillä ja paina SET uudelleen. Aset kuukausi, päivä,
FullHD herätyskello-valvontakamera Käyttöohje Ajan asetus Kun kellonaika on näytössä paina SET, näytöllä näkyy nyt vuosi aseta oikea aika UP ja DOWNnäppäimillä ja paina SET uudelleen. Aset kuukausi, päivä,
GREDDY PROFEC B SPEC II säätäminen
 GREDDY PROFEC B SPEC II säätäminen Päätin tehdä tällaisen ohjeen, koska jotkut ovat sitä kyselleet suomeksi. Tämä on vapaa käännös eräästä ohjeesta, joka on suunnattu Evoille (joka on koettu toimivaksi
GREDDY PROFEC B SPEC II säätäminen Päätin tehdä tällaisen ohjeen, koska jotkut ovat sitä kyselleet suomeksi. Tämä on vapaa käännös eräästä ohjeesta, joka on suunnattu Evoille (joka on koettu toimivaksi
NOOX xperio herätyskello valvontakamera
 NOOX xperio herätyskello valvontakamera Käyttöohje Ajan asetus Kun kellonaika on näytössä paina SET, ruudulla lukee nyt "2010" Aseta oikea aika UP ja DOWN näppäimillä ja paina SET uudelleen vahvistaakseni
NOOX xperio herätyskello valvontakamera Käyttöohje Ajan asetus Kun kellonaika on näytössä paina SET, ruudulla lukee nyt "2010" Aseta oikea aika UP ja DOWN näppäimillä ja paina SET uudelleen vahvistaakseni
KOSTEUSLÄHETTIMET RHT
 KOSTEUSLÄHETTIMET RHT KÄYTTÖOHJE RHT KÄYTTÖOHJE Tämä dokumentti sisältää tietoa kosketusnäytöllisen RHTkosteuslähettimen käyttöönotosta. Ennen kuin aloitat, varmista että lähetin on asennettu asennusohjeiden
KOSTEUSLÄHETTIMET RHT KÄYTTÖOHJE RHT KÄYTTÖOHJE Tämä dokumentti sisältää tietoa kosketusnäytöllisen RHTkosteuslähettimen käyttöönotosta. Ennen kuin aloitat, varmista että lähetin on asennettu asennusohjeiden
Kauko-ohjaimen käyttöohje. Part No.: R08019034086. OM-GS02-1009(0)-Acson FAN SWING MODE TURBO TIMER OFF CANCEL. Acson A5WM15JR Acson A5WM25JR
-Acson FAN SWING MODE TURBO TIMER OFF CANCEL. Acson A5WM15JR Acson A5WM25JR") Kauko-ohjaimen käyttöohje Part No.: R08019034086 OM-GS0-1009(0)-Acson Acson A5WM15JR Acson A5WM5JR 1 6 7 9 3 4 5 13 1 11 8 10 Kiinnitys seinään Paristojen asennus (AAA.R03) Paristot 1) Tyyppi AAA R03 )
Kauko-ohjaimen käyttöohje Part No.: R08019034086 OM-GS0-1009(0)-Acson Acson A5WM15JR Acson A5WM5JR 1 6 7 9 3 4 5 13 1 11 8 10 Kiinnitys seinään Paristojen asennus (AAA.R03) Paristot 1) Tyyppi AAA R03 )
Installation instructions, accessories. Handsfree, bluetooth. Volvo Car Corporation Gothenburg, Sweden , ,
 Installation instructions, accessories Ohje nro 31337686 Versio 1.2 Osa nro 31337677, 31310791, 31357750 Handsfree, bluetooth Volvo Car Corporation Handsfree, bluetooth- 31337686 - V1.2 Sivu 1 / 74 Materiaali
Installation instructions, accessories Ohje nro 31337686 Versio 1.2 Osa nro 31337677, 31310791, 31357750 Handsfree, bluetooth Volvo Car Corporation Handsfree, bluetooth- 31337686 - V1.2 Sivu 1 / 74 Materiaali
LANGATON RENGASPAINEEN JA LÄMPÖTILAN VALVONTAJÄRJESTELMÄ
 LANGATON RENGASPAINEEN JA LÄMPÖTILAN VALVONTAJÄRJESTELMÄ TPMS Käyttöohjekirja Malli n:o: CL-M2+SO 1 SISÄLLYSLUETTELO 1. TPMS:n PÄÄTOIMINNOT... 1 2. TUOTTEEN OMINAISUUDET...1 3. JÄRJESTELMÄN KOMPONENTIT...1-2
LANGATON RENGASPAINEEN JA LÄMPÖTILAN VALVONTAJÄRJESTELMÄ TPMS Käyttöohjekirja Malli n:o: CL-M2+SO 1 SISÄLLYSLUETTELO 1. TPMS:n PÄÄTOIMINNOT... 1 2. TUOTTEEN OMINAISUUDET...1 3. JÄRJESTELMÄN KOMPONENTIT...1-2
(Man over board / mies yli laidan) -merkin aluksen sijainnin kohdalle. Nuolipainikkeet painallus aktivoi kohdistimen tai siirtää sitä.
 -merkin aluksen sijainnin kohdalle. Nuolipainikkeet painallus aktivoi kohdistimen tai siirtää sitä.") Zeus 3 Pikaopas FI Etupaneeli 2 3 4 5 6 7 8 9 10 11 12 12 1 Nro Kuvaus 1 Kosketusnäyttö. 2 Sivut-/Kotipainike avaa Kotisivun sivun valintaa ja asetusten muokkaamista varten. WheelKey käyttäjän määritettävissä
Zeus 3 Pikaopas FI Etupaneeli 2 3 4 5 6 7 8 9 10 11 12 12 1 Nro Kuvaus 1 Kosketusnäyttö. 2 Sivut-/Kotipainike avaa Kotisivun sivun valintaa ja asetusten muokkaamista varten. WheelKey käyttäjän määritettävissä
HDS Live Pikaopas. Näppäimet I J
 Näppäimet D FG MOB B C E H I J *Ei saatavilla 7 ja 9 tuuman yksiköihin B C D E F G H I J HDS Live Pikaopas Sivut Reittipiste Nuolet Poistu Enter Zoomaus Valikko Virta Nopea pääsy* Kortinlukija ktivoi aloitussivu
Näppäimet D FG MOB B C E H I J *Ei saatavilla 7 ja 9 tuuman yksiköihin B C D E F G H I J HDS Live Pikaopas Sivut Reittipiste Nuolet Poistu Enter Zoomaus Valikko Virta Nopea pääsy* Kortinlukija ktivoi aloitussivu
Käyttöohjeet. Näppäimet. Kello tila. Pelitila
 Käyttöohjeet Näppäimet Kello tila Pelitila Kohdekuvakkeiden tiedot 1. Aloitus 1.1. Käynnistys / sammutus Paina ja pidä pohjassa -näppäintä käynnistääksesi / sulkeaksesi laitteen. 1.2. Lataaminen Lataa
Käyttöohjeet Näppäimet Kello tila Pelitila Kohdekuvakkeiden tiedot 1. Aloitus 1.1. Käynnistys / sammutus Paina ja pidä pohjassa -näppäintä käynnistääksesi / sulkeaksesi laitteen. 1.2. Lataaminen Lataa
Konfiguraatiotyökalun päivitys
 Konfiguraatiotyökalun päivitys Kuinka aloitan? Konfiguraatiotyökalu avataan niin kuin aiemminkin suoraan Tenstar clientin käyttöliittymästä, tai harjoituksen ollessa käynnissä. Kuinka aloitan konfiguraatiotyökalun
Konfiguraatiotyökalun päivitys Kuinka aloitan? Konfiguraatiotyökalu avataan niin kuin aiemminkin suoraan Tenstar clientin käyttöliittymästä, tai harjoituksen ollessa käynnissä. Kuinka aloitan konfiguraatiotyökalun
- Käyttäjä voi valita halutun sisääntulon signaalin asetusvalikosta (esim. 0 5V, 0 10 V tai 4 20 ma)
") LE PDX DIN kiskokiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 4 numeroinen LED näyttö - Selkeä rakenne, yksinkertainen käyttää
LE PDX DIN kiskokiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 4 numeroinen LED näyttö - Selkeä rakenne, yksinkertainen käyttää
ELECTROLUX ILMALÄMPÖPUMPUN PIKAOHJE
 ELECTROLUX ILMALÄMPÖPUMPUN PIKAOHJE 2 ELECTROLUX ILMALÄMPÖPUMPUN PIKAOHJE HUOM! Jotkin kaukosäätimen toiminnoista eivät välttämättä ole käytettävissä mallista riippuen. Varmista ettei kaukosäätimen signaalin
ELECTROLUX ILMALÄMPÖPUMPUN PIKAOHJE 2 ELECTROLUX ILMALÄMPÖPUMPUN PIKAOHJE HUOM! Jotkin kaukosäätimen toiminnoista eivät välttämättä ole käytettävissä mallista riippuen. Varmista ettei kaukosäätimen signaalin
Internet-ohjeet AutoChart LIVE
 Internet-ohjeet AutoChart LIVE AUTOCHART LIVE AutoChart LIVEn avulla voit luoda omia karttojasi mistä tahansa vesistöistä, joista ei välttämättä ole edes olemassa mitään pohjakarttaa! AutoChart LIVE edellyttää
Internet-ohjeet AutoChart LIVE AUTOCHART LIVE AutoChart LIVEn avulla voit luoda omia karttojasi mistä tahansa vesistöistä, joista ei välttämättä ole edes olemassa mitään pohjakarttaa! AutoChart LIVE edellyttää
TUTA Q2 Tallentava valvontakamera Asennusohje
 TUTA Q2 Tallentava valvontakamera Asennusohje 1.02 Version 1.8.2011 Uusin versio tästä käsirkirjasta löytyy internet-osoitteesta: http://www.microdata.fi/pdf/tuta/tuta-q2_kasikirja.pdf Copyright 2011 Microdata
TUTA Q2 Tallentava valvontakamera Asennusohje 1.02 Version 1.8.2011 Uusin versio tästä käsirkirjasta löytyy internet-osoitteesta: http://www.microdata.fi/pdf/tuta/tuta-q2_kasikirja.pdf Copyright 2011 Microdata
ILMASTOINTILAITTEEN KAUKO-OHJAIMEN KÄYTTÖ OHJE
 ILMASTOINTILAITTEEN KAUKO-OHJAIMEN KÄYTTÖ OHJE Kiitos, että hankit ilmastointilaitteemme. Ole hyvä ja lue tämä käyttöohje huolella ennen ilmastointilaitteen käyttöä. SISÄLTÖ Kauko-ohjaimen käsittely...2
ILMASTOINTILAITTEEN KAUKO-OHJAIMEN KÄYTTÖ OHJE Kiitos, että hankit ilmastointilaitteemme. Ole hyvä ja lue tämä käyttöohje huolella ennen ilmastointilaitteen käyttöä. SISÄLTÖ Kauko-ohjaimen käsittely...2
Käyttäjän opas Kaukosäädin Invest Living ROOM 5
 Käyttäjän opas Kaukosäädin Invest Living ROOM 5 Scandinavian heat pumps Sisältö. Kaukosäätimen kuvaus. Painikkeet -5. Kaukosäätimen kuvakkeet 6 4. Painikkeiden käyttö 7-8 (AUTO/JÄÄHDYTYS/LÄMMITYS/TUULETIN/KOSTEUDENPOISTO)
Käyttäjän opas Kaukosäädin Invest Living ROOM 5 Scandinavian heat pumps Sisältö. Kaukosäätimen kuvaus. Painikkeet -5. Kaukosäätimen kuvakkeet 6 4. Painikkeiden käyttö 7-8 (AUTO/JÄÄHDYTYS/LÄMMITYS/TUULETIN/KOSTEUDENPOISTO)
Luxomat PD4-M-TRIO-2DALI-1C-AP tai FP asennus ja säätöohje
 Luxomat PD4-M-TRIO-2DALI-1C-AP tai FP asennus ja säätöohje PD4-M-TRIO-2DALI/DSI-1C tunnistin Tunnistin on erityisesti koululuokkiin suunniteltu läsnäolotunnistin tunnistin. Tunnistin kykenee ohjaamaan
Luxomat PD4-M-TRIO-2DALI-1C-AP tai FP asennus ja säätöohje PD4-M-TRIO-2DALI/DSI-1C tunnistin Tunnistin on erityisesti koululuokkiin suunniteltu läsnäolotunnistin tunnistin. Tunnistin kykenee ohjaamaan
PIKAOHJE D-LINE / D-SAT Näyttötaulut
 v.181012 PIKAOHJE D-LINE / D-SAT Näyttötaulut URHEILUN AJANOTON EDELLÄKÄVIJÄ Sisällysluettelo 1.1 Näytön asetusten vaihto ja esimerkki kellonajan vaihdosta... 1 1.2 Tehdasasetukset... 2 1.3 Tärkeimmät
v.181012 PIKAOHJE D-LINE / D-SAT Näyttötaulut URHEILUN AJANOTON EDELLÄKÄVIJÄ Sisällysluettelo 1.1 Näytön asetusten vaihto ja esimerkki kellonajan vaihdosta... 1 1.2 Tehdasasetukset... 2 1.3 Tärkeimmät
Käyttöönotto-opas RT Controller
 Käyttöönotto-opas RT Controller Pikaopas RT-järjestelmän käyttöönottoa varten Aloitusopas RT Controller Versio 1.3 (090831) (Käytä tämän pikaoppaan kanssa opasta User Manual RT Controller, versio 2.1 tai
Käyttöönotto-opas RT Controller Pikaopas RT-järjestelmän käyttöönottoa varten Aloitusopas RT Controller Versio 1.3 (090831) (Käytä tämän pikaoppaan kanssa opasta User Manual RT Controller, versio 2.1 tai
Säädettävät parametrit Signaalit ja näkyvyysjärjestelmät
 Johdanto Johdanto Säädettävien parametrien luettelon rajaamiseksi tässä kuvataan vain sellaiset parametrit, joista on todennäköisesti hyötyä päällirakentajille. Jos haluat lisätietoja tietyn ajoneuvomallin
Johdanto Johdanto Säädettävien parametrien luettelon rajaamiseksi tässä kuvataan vain sellaiset parametrit, joista on todennäköisesti hyötyä päällirakentajille. Jos haluat lisätietoja tietyn ajoneuvomallin
HDS Gen3 Pikaopas. Yleiskuvaus. Nro Näppäin Toiminto
 HDS Gen3 Pikaopas FI Yleiskuvaus 1 4 6 5 7 2 3 8 9 10 11 Nro Näppäin Toiminto 1 Kosketusnäyttö 2 Sivut-näppäin Aktivoi aloitussivun Kohdistin- Siirtää kohdistinta, siirtyy valikkokohteissa ja säätää arvoja
HDS Gen3 Pikaopas FI Yleiskuvaus 1 4 6 5 7 2 3 8 9 10 11 Nro Näppäin Toiminto 1 Kosketusnäyttö 2 Sivut-näppäin Aktivoi aloitussivun Kohdistin- Siirtää kohdistinta, siirtyy valikkokohteissa ja säätää arvoja
1. Seinäkiinnike 2. Pöytätuki 3. Paristokotelo 4. RESET -näppäin 5. C/ F -näppäin (paristokotelossa) 6. Tuuletusaukko
 6. Tuuletusaukko") Esittely Kiitos että valitsit Oregon Scientific TM tuotteen. Tämä tuote on suunniteltu huolettomaan ja ongelmattomaan käyttöön vuosiksi eteenpäin. Pakkauksessa on seuraavat osat: - Pääyksikkö (BAR289)
Esittely Kiitos että valitsit Oregon Scientific TM tuotteen. Tämä tuote on suunniteltu huolettomaan ja ongelmattomaan käyttöön vuosiksi eteenpäin. Pakkauksessa on seuraavat osat: - Pääyksikkö (BAR289)
SG520 Series. Käyttöohje Bolyguard Small riistakamera. Sivu 1
 1 Yleiskatsaus Käyttöohje Bolyguard Small riistakamera SG520 Series Sivu 1 1 Yleiskatsaus Sisältö 1 Yleiskatsaus... 3 1.1 Kameran rakenne... 3 1.2 Yleinen kuvaus... 4 1.3 Näyttö... 4 1.4 Kuvien ja videoiden
1 Yleiskatsaus Käyttöohje Bolyguard Small riistakamera SG520 Series Sivu 1 1 Yleiskatsaus Sisältö 1 Yleiskatsaus... 3 1.1 Kameran rakenne... 3 1.2 Yleinen kuvaus... 4 1.3 Näyttö... 4 1.4 Kuvien ja videoiden
Sangean PR-D4 Käyttöohjeet
 Sangean PR-D4 Käyttöohjeet Kytkimet 1. Taajuuden valintanäppäimet 2. Radioasemien selailun ja kellonajan asetus 3. Muistipaikan valintanäppäimet 4. Äänenvoimakkuuden säätö 5. LCD-näyttö 6. Herätyksen asetus
Sangean PR-D4 Käyttöohjeet Kytkimet 1. Taajuuden valintanäppäimet 2. Radioasemien selailun ja kellonajan asetus 3. Muistipaikan valintanäppäimet 4. Äänenvoimakkuuden säätö 5. LCD-näyttö 6. Herätyksen asetus
Eye Pal Solo. Käyttöohje
 Eye Pal Solo Käyttöohje 1 Eye Pal Solon käyttöönotto Eye Pal Solon pakkauksessa tulee kolme osaa: 1. Peruslaite, joka toimii varsinaisena lukijana ja jonka etureunassa on laitteen ohjainpainikkeet. 2.
Eye Pal Solo Käyttöohje 1 Eye Pal Solon käyttöönotto Eye Pal Solon pakkauksessa tulee kolme osaa: 1. Peruslaite, joka toimii varsinaisena lukijana ja jonka etureunassa on laitteen ohjainpainikkeet. 2.
- Käyttäjä voi valita halutun sisääntulon signaalin asetusvalikosta (esim. 0 5V, 0 10 V tai 4 20 ma)
") LE PSX DIN kisko kiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 3 numeron LED näyttö - Selkeä rakenne, yksinkertainen käyttää
LE PSX DIN kisko kiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 3 numeron LED näyttö - Selkeä rakenne, yksinkertainen käyttää
DIMLITE Daylight. Sähkönumero 2604221. Käyttöohje
 DIMLITE Daylight Sähkönumero 2604221 Käyttöohje T1 / T2 sisääntulot Yksittäispainikeohjaus Nopea painallus Tx painikkeesta sytyttää valaistuksen sytytyshetkellä valitsevaan päivänvalotilanteeseen tai viimeisimmäksi
DIMLITE Daylight Sähkönumero 2604221 Käyttöohje T1 / T2 sisääntulot Yksittäispainikeohjaus Nopea painallus Tx painikkeesta sytyttää valaistuksen sytytyshetkellä valitsevaan päivänvalotilanteeseen tai viimeisimmäksi
Ajastin tarjoaa erilaisia toimintoja, kuten "Clock Display", "sekuntikello", "lähtölaskenta", "CountUp", "jaksoajastimen ja "Fight Gone Bad" -ajastin.
 6-DIGIT CROSSFIT TIMER Ajastin tarjoaa erilaisia toimintoja, kuten "Clock Display", "sekuntikello", "lähtölaskenta", "CountUp", "jaksoajastimen ja "Fight Gone Bad" -ajastin. Lisäksi erityiset CountUp-
6-DIGIT CROSSFIT TIMER Ajastin tarjoaa erilaisia toimintoja, kuten "Clock Display", "sekuntikello", "lähtölaskenta", "CountUp", "jaksoajastimen ja "Fight Gone Bad" -ajastin. Lisäksi erityiset CountUp-
Käyttöohje. Painikkeet:
 Käyttöohje Painikkeet: 1. PLAY: Päällä/pois päältä Toisto/Pysäytys 2. M: Valinta/Vahvistus 3. ON/OFF: Virtapainike soittimen päällä 4 Vol+: Äänenvoimakkuuden lisäys 5 Vol-: Äänenvoimakkuuden vähennys :
Käyttöohje Painikkeet: 1. PLAY: Päällä/pois päältä Toisto/Pysäytys 2. M: Valinta/Vahvistus 3. ON/OFF: Virtapainike soittimen päällä 4 Vol+: Äänenvoimakkuuden lisäys 5 Vol-: Äänenvoimakkuuden vähennys :
1. 2. 3. 4. 5. 6. Näyttö. Laitteen osat 1. Kellonaika- / herätysaika- / kalenteri-ikkuna: Näyttää radiosignaalista päivittyvän kellon, 3. 4.
 Esittely Kiitos että valitsit Oregon Scientific TM tuotteen. Tämä tuote on suunniteltu huolettomaan ja ongelmattomaan käyttöön vuosiksi eteenpäin. Pakkauksessa on seuraavat osat: - Pääyksikkö (BAR283)
Esittely Kiitos että valitsit Oregon Scientific TM tuotteen. Tämä tuote on suunniteltu huolettomaan ja ongelmattomaan käyttöön vuosiksi eteenpäin. Pakkauksessa on seuraavat osat: - Pääyksikkö (BAR283)
Garmin GPSmap 60CSx -laite
 Garmin GPSmap 60CSx -laite GPS koulutus 20.6.2007 PAIKKATIETOPAJA -hanke Näppäimet ja laitteen osat Power - virta päälle/pois, taustavalon säätö Keinunäppäin valitse vaihtoehtoja / kenttiä, syötä tietoja,
Garmin GPSmap 60CSx -laite GPS koulutus 20.6.2007 PAIKKATIETOPAJA -hanke Näppäimet ja laitteen osat Power - virta päälle/pois, taustavalon säätö Keinunäppäin valitse vaihtoehtoja / kenttiä, syötä tietoja,
Pilot 3380 A U T O P I L O T S Y S T E M. Operation Manual. Suomi NAVMAN
 Pilot 3380 A U T O P I L O T S Y S T E M Operation Manual Suomi w w w. n a v m a n. c o m NAVMAN Sisältö 1 Johdanto.................................................................................. 368
Pilot 3380 A U T O P I L O T S Y S T E M Operation Manual Suomi w w w. n a v m a n. c o m NAVMAN Sisältö 1 Johdanto.................................................................................. 368
Finnish. Osien nimet. Tarkistuslaiteyksikkö. Sähkökaapelin tarkistuslaite. Vaihtokytkimen tarkistuslaite SM-EC79 HAKEMISTO
 SM-EC79 HAKEMISTO Tarkistuslaitteen käyttö Ongelman sijainnin määritys tarkistuslaitteella 136 Ongelma etuvaihtajassa tai takavaihtajassa 137 Ongelma SM-EW79A + ST-7970:n toiminnassa 139 SM-EW79A tarkistus
SM-EC79 HAKEMISTO Tarkistuslaitteen käyttö Ongelman sijainnin määritys tarkistuslaitteella 136 Ongelma etuvaihtajassa tai takavaihtajassa 137 Ongelma SM-EW79A + ST-7970:n toiminnassa 139 SM-EW79A tarkistus
JOYETECH EVIC VT KÄYTTÖOHJE
 JOYETECH EVIC VT KÄYTTÖOHJE 1/7 KUINKA KÄYTTÄÄ? Virta päälle/pois Paina käyttökytkintä viisi kertaa nopeassa tahdissa käynnistääksesi laitteen. Paina käyttökytkintä viisi kertaa nopeassa tahdissa sulkeaksesi
JOYETECH EVIC VT KÄYTTÖOHJE 1/7 KUINKA KÄYTTÄÄ? Virta päälle/pois Paina käyttökytkintä viisi kertaa nopeassa tahdissa käynnistääksesi laitteen. Paina käyttökytkintä viisi kertaa nopeassa tahdissa sulkeaksesi
Käyttöohje CRL Ennen tämän tuotteen käyttöä lue tämä käyttöohje huolellisesti ja kokonaan.
 Käyttöohje Kelloradio CRL-340 www.denver-electronics.com Ennen tämän tuotteen käyttöä lue tämä käyttöohje huolellisesti ja kokonaan. 1. Toiminto 1.1 LED-aikanäyttö 12 tuntia tai 24 tuntia 1.2 Valkoinen
Käyttöohje Kelloradio CRL-340 www.denver-electronics.com Ennen tämän tuotteen käyttöä lue tämä käyttöohje huolellisesti ja kokonaan. 1. Toiminto 1.1 LED-aikanäyttö 12 tuntia tai 24 tuntia 1.2 Valkoinen
T80_a_BA.book Seite 1 Donnerstag, 22. April :01 16 Telestart T80
 Telestart T80 D Deutsch 1 Dansk 61 DK GB English 11 Svenska 71 S F Français 21 Norsk 81 N I Italiano 31 Suomi 91 FIN ES Español 41 Polski 101 PL NL Nederlands 51 Русский 111 RU Käyttö- ja huolto-ohje
Telestart T80 D Deutsch 1 Dansk 61 DK GB English 11 Svenska 71 S F Français 21 Norsk 81 N I Italiano 31 Suomi 91 FIN ES Español 41 Polski 101 PL NL Nederlands 51 Русский 111 RU Käyttö- ja huolto-ohje
Rider 20 Rider 20:ssä on kolme näppäintä, joita käytetään useisiin eri tarkoituksiin.
 Pikaopas Rider Rider :ssä on kolme näppäintä, joita käytetään useisiin eri tarkoituksiin. 1 Näppäintoiminnot YLÖS (1) ALAS (3) Paina pitkään kytkeäksesi taustavalon Paina mittaritilassa lyhyesti vierittääksesi
Pikaopas Rider Rider :ssä on kolme näppäintä, joita käytetään useisiin eri tarkoituksiin. 1 Näppäintoiminnot YLÖS (1) ALAS (3) Paina pitkään kytkeäksesi taustavalon Paina mittaritilassa lyhyesti vierittääksesi
Tärkeää: Nähdäksesi täydentäviä ohjeita, katso yksityiskohtaisempi käyttöohje (97711) osoitteessa www.fermax.com.
 osoitteessa www.fermax.com.") SMILE PERUSNÄYTTÖ Tärkeää: Nähdäksesi täydentäviä ohjeita, katso yksityiskohtaisempi käyttöohje (97711) osoitteessa www.fermax.com. Näppäimet Audio ja lopetusnäppäin Vastaanota puhelu tällä näppäimellä
SMILE PERUSNÄYTTÖ Tärkeää: Nähdäksesi täydentäviä ohjeita, katso yksityiskohtaisempi käyttöohje (97711) osoitteessa www.fermax.com. Näppäimet Audio ja lopetusnäppäin Vastaanota puhelu tällä näppäimellä
KÄYTTÄJÄN OHJE. Ilmalämpöpumppu. Onnline N09LHE ja N12LHE SISÄLTÖ. Kauko-ohjaimen käyttö...1. Kauko-ohjaimen tekniset tiedot...2
 KÄYTTÄJÄN OHJE Ilmalämpöpumppu Onnline N09LHE ja N12LHE KAUKO-OHJAIN ILLUSTRATION SISÄLTÖ Kauko-ohjaimen käyttö...1 Kauko-ohjaimen tekniset tiedot...2 Kauko-ohjaimen painikkeiden toiminnot...2 Näytön merkit...5
KÄYTTÄJÄN OHJE Ilmalämpöpumppu Onnline N09LHE ja N12LHE KAUKO-OHJAIN ILLUSTRATION SISÄLTÖ Kauko-ohjaimen käyttö...1 Kauko-ohjaimen tekniset tiedot...2 Kauko-ohjaimen painikkeiden toiminnot...2 Näytön merkit...5
KÄYTTÖOHJE BONECO P340
 93 KÄYTTÖOHJE BONECO P340 94 YLEISKUVA JA OSIEN NIMET 4 5 1 Suojakansi 1 2 3 2 Esisuodatin 3 Suodatin A341 4 BONECO P340 5 Ohjauspaneeli ja näytöt 95 SISÄLTÖ Yleiskuva ja osien nimet 94 Toimitussisältö
93 KÄYTTÖOHJE BONECO P340 94 YLEISKUVA JA OSIEN NIMET 4 5 1 Suojakansi 1 2 3 2 Esisuodatin 3 Suodatin A341 4 BONECO P340 5 Ohjauspaneeli ja näytöt 95 SISÄLTÖ Yleiskuva ja osien nimet 94 Toimitussisältö
KÄYTTÖOHJE CITIZEN ECO-DRIVE KRONOGRAFI Malli: CB5020, cal. E660 (Radio control)
") KÄYTTÖOHJE CITIZEN ECO-DRIVE KRONOGRAFI Malli: CB5020, cal. E660 (Radio control) * Aurinkopaneeli on kellotaulun alla Toiminnon vaihtaminen Kellossa on 4 toimintoa: 3 Paina lopuksi nuppi asentoon. Valittu
KÄYTTÖOHJE CITIZEN ECO-DRIVE KRONOGRAFI Malli: CB5020, cal. E660 (Radio control) * Aurinkopaneeli on kellotaulun alla Toiminnon vaihtaminen Kellossa on 4 toimintoa: 3 Paina lopuksi nuppi asentoon. Valittu
FRWD-RANNENÄYTÖN KÄYTTÖOPAS
 FRWD-RANNENÄYTÖN KÄYTTÖOPAS RANNENÄYTÖN TÄRKEIMMÄT OMINAISUUDET» Toiminta-aika (huoneenlämmössä) - kellotilassa: 1 vuosi - mittaustilassa: 500 tuntia» Koko: leveys 46 mm, paksuus 18 mm» LCD-näyttö» Kaksi
FRWD-RANNENÄYTÖN KÄYTTÖOPAS RANNENÄYTÖN TÄRKEIMMÄT OMINAISUUDET» Toiminta-aika (huoneenlämmössä) - kellotilassa: 1 vuosi - mittaustilassa: 500 tuntia» Koko: leveys 46 mm, paksuus 18 mm» LCD-näyttö» Kaksi
Käyttöohje. Aura Remote App v1.6.0
 Käyttöohje Aura Remote App v0 Kirjautuminen Applikaation version numero Mahdollisuus testata sovelluksen Demo versiota. Tähän voit syöttää koodin, jonka löydät Aura Remoten keskusyksikön takaa. Valitse
Käyttöohje Aura Remote App v0 Kirjautuminen Applikaation version numero Mahdollisuus testata sovelluksen Demo versiota. Tähän voit syöttää koodin, jonka löydät Aura Remoten keskusyksikön takaa. Valitse
ABT NOSTURIVAA AN KÄYTTÖOHJE 3000, 5000, 10000 ja 15000kg
 ABT NOSTURIVAA AN KÄYTTÖOHJE 3000, 5000, 10000 ja 15000kg 1. Turvallisuusohjeet Lue tämä käyttöohje ennen käyttöä! 1.1 Vaakaa ei saa ylikuormittaa. 1.2 Älä roikota painavaa takkaa pitkää aikaa vaa assa,
ABT NOSTURIVAA AN KÄYTTÖOHJE 3000, 5000, 10000 ja 15000kg 1. Turvallisuusohjeet Lue tämä käyttöohje ennen käyttöä! 1.1 Vaakaa ei saa ylikuormittaa. 1.2 Älä roikota painavaa takkaa pitkää aikaa vaa assa,
AirPatrol WiFin käyttöohje V1.0
 AirPatrol WiFin käyttöohje V1.0 Sisällysluettelo Mitä AirPatrol WiFi tekee? 3 Valot ja painikkeet 4 WiFi-verkosto 5 AirPatrol WiFin asennus 6 Käskyjen lähettäminen 24 Lisää / poista suosikkeja 25 Asetusvalikko
AirPatrol WiFin käyttöohje V1.0 Sisällysluettelo Mitä AirPatrol WiFi tekee? 3 Valot ja painikkeet 4 WiFi-verkosto 5 AirPatrol WiFin asennus 6 Käskyjen lähettäminen 24 Lisää / poista suosikkeja 25 Asetusvalikko
JOVISION IP-KAMERA Käyttöohje
 JOVISION IP-KAMERA Käyttöohje 1 Yleistä... 2 2 Kameran kytkeminen verkkoon... 2 2.1 Tietokoneella... 2 2.2 Älypuhelimella / tabletilla... 5 3 Salasanan vaihtaminen... 8 3.1 Salasanan vaihtaminen Windows
JOVISION IP-KAMERA Käyttöohje 1 Yleistä... 2 2 Kameran kytkeminen verkkoon... 2 2.1 Tietokoneella... 2 2.2 Älypuhelimella / tabletilla... 5 3 Salasanan vaihtaminen... 8 3.1 Salasanan vaihtaminen Windows
Esittely Kiitos että valitsit Oregon Scientific TM tuotteen. Tämä tuote on suunniteltu huolettomaan ja ongelmattomaan käyttöön vuosiksi eteenpäin.
 Esittely Kiitos että valitsit Oregon Scientific TM tuotteen. Tämä tuote on suunniteltu huolettomaan ja ongelmattomaan käyttöön vuosiksi eteenpäin. Tässä tuotteessa on seuraavat ominaisuudet: - Radiosignaalista
Esittely Kiitos että valitsit Oregon Scientific TM tuotteen. Tämä tuote on suunniteltu huolettomaan ja ongelmattomaan käyttöön vuosiksi eteenpäin. Tässä tuotteessa on seuraavat ominaisuudet: - Radiosignaalista
Käyttäjän Pikaohje. CCTV Videovalvonta
 Käyttäjän Pikaohje CCTV Videovalvonta Tallenteiden haku 1.Aikahaku 1. Aloittaaksesi tallenteiden haun, paina näppäintä, jolloin aikahaun valikko tulee näkyviin, kuten alla. 2. Käytä vasen/oikea näppäimiä
Käyttäjän Pikaohje CCTV Videovalvonta Tallenteiden haku 1.Aikahaku 1. Aloittaaksesi tallenteiden haun, paina näppäintä, jolloin aikahaun valikko tulee näkyviin, kuten alla. 2. Käytä vasen/oikea näppäimiä
Maha Eurosystem jarrulaskentaohjelman asennusohje versio 7.20.026
 2012 Tecalemit Oy Seppo Koskivuori Maha Eurosystem jarrulaskentaohjelman asennusohje versio 7.20.026 Vaatimukset: - tietokone (PC), jossa vapaa USB portti - käyttöjärjestelmä Windows XP, Vista tai Windows
2012 Tecalemit Oy Seppo Koskivuori Maha Eurosystem jarrulaskentaohjelman asennusohje versio 7.20.026 Vaatimukset: - tietokone (PC), jossa vapaa USB portti - käyttöjärjestelmä Windows XP, Vista tai Windows
system 2.0 KODIN OHJAUSLAITE
 system 2.0 KODIN OHJAUSLAITE KÄYTTÖ- JA OHJEKIRJA YLEISTÄ Lue tämä ohjekirja huolellisesti ennen ohjausyksikön käytön aloittamista, käytä ainoastaan tämän kirjan ohjeiden ja annettujen opastusten mukaisesti.
system 2.0 KODIN OHJAUSLAITE KÄYTTÖ- JA OHJEKIRJA YLEISTÄ Lue tämä ohjekirja huolellisesti ennen ohjausyksikön käytön aloittamista, käytä ainoastaan tämän kirjan ohjeiden ja annettujen opastusten mukaisesti.
KUORMANILMAISIN / NOSTURIVAAKA. Käyttöohje
 KUORMANILMAISIN / NOSTURIVAAKA Sisällysluettelo Versio A 1. Johdanto... 1 Huomautus... 1 Turvallisuusohjeet... 1 2. Tekniset tiedot... 2 Ominaisuudet... 2 Tekniset tiedot... 3 Kapasiteetti ja tarkkuus...
KUORMANILMAISIN / NOSTURIVAAKA Sisällysluettelo Versio A 1. Johdanto... 1 Huomautus... 1 Turvallisuusohjeet... 1 2. Tekniset tiedot... 2 Ominaisuudet... 2 Tekniset tiedot... 3 Kapasiteetti ja tarkkuus...
Kanava ylös / valikko ylös Kanava alas / valikko alas Laske äänenvoimakkuutta. Nosta äänenvoimakkuutta / valikon vahvistus
 Tuotetiedot Kytkennät Kytkentä VGA-TULO PC-ÄÄNITULO VGA-LÄHTÖ STEREO- LÄHTÖ TV-LÄHTÖ ANTENNI DC-TULO AUDIO-L-TULO AUDIO-R-TULO VIDEO-TULO Ohjauspaneeli S-VIDEO-TULO CH+/YLÖS CH-/ALAS VOL- VOL+/ENTER MENU/ESC
Tuotetiedot Kytkennät Kytkentä VGA-TULO PC-ÄÄNITULO VGA-LÄHTÖ STEREO- LÄHTÖ TV-LÄHTÖ ANTENNI DC-TULO AUDIO-L-TULO AUDIO-R-TULO VIDEO-TULO Ohjauspaneeli S-VIDEO-TULO CH+/YLÖS CH-/ALAS VOL- VOL+/ENTER MENU/ESC
Käyttöohje Contact WP Poca
 Käyttöohje Contact WP Poca 1 SISÄLLYSLUETTELO 1 Yleistä...3 2 Tilausvälityssovelluksen käynnistäminen...3 3 Poca-laitteen aktivoiminen...4 3.1 Toiminnon aktivoiminen:...4 4 Tilauksen vastaanottaminen...6
Käyttöohje Contact WP Poca 1 SISÄLLYSLUETTELO 1 Yleistä...3 2 Tilausvälityssovelluksen käynnistäminen...3 3 Poca-laitteen aktivoiminen...4 3.1 Toiminnon aktivoiminen:...4 4 Tilauksen vastaanottaminen...6
Paikantavan turvapuhelimen käyttöohje
 Paikantavan turvapuhelimen käyttöohje Stella Turvapuhelin ja Hoiva Oy Tämä ohje kertoo miten paikantavaa turvapuhelinta käytetään Stella Turvapuhelin ja Hoiva Oy Mannerheimintie 164 00300 Helsinki Sisällysluettelo
Paikantavan turvapuhelimen käyttöohje Stella Turvapuhelin ja Hoiva Oy Tämä ohje kertoo miten paikantavaa turvapuhelinta käytetään Stella Turvapuhelin ja Hoiva Oy Mannerheimintie 164 00300 Helsinki Sisällysluettelo
Precision-9-asennusopas
 Precision-9-asennusopas Yleistä Precision-9-kompassi on tarkoitettu purje- ja pikaveneisiin näyttämään magneettista ohjaussuuntaa. Se liitetään veneen NMEA 2000 -verkkoon, jolloin sitä voidaan hallita
Precision-9-asennusopas Yleistä Precision-9-kompassi on tarkoitettu purje- ja pikaveneisiin näyttämään magneettista ohjaussuuntaa. Se liitetään veneen NMEA 2000 -verkkoon, jolloin sitä voidaan hallita
Rannikkomerenkulkuoppi
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 15.12.2017 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 15.12.2017 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
LADDOMAT MR. Asennus- ja käyttöohje
 LADDOMAT MR Asennus- ja käyttöohje Laddomat MR on erillisellä liitäntäkeskuksella (LK) varustettu säätölaite. Siinä on 3 relettä ja 4 lämpötilatunnistintuloa. Käytettävissä on useita erilaisia ohjausvaihtoehtoja.
LADDOMAT MR Asennus- ja käyttöohje Laddomat MR on erillisellä liitäntäkeskuksella (LK) varustettu säätölaite. Siinä on 3 relettä ja 4 lämpötilatunnistintuloa. Käytettävissä on useita erilaisia ohjausvaihtoehtoja.
GIGABYTE tietokoneen käyttö ensimmäistä kertaa
 Onnittelut GIGABYTE tietokoneen ostosta. Tämä käyttöohje auttaa sinua tietokoneesi käyttöönotossa. Lopullisen tuotteen asetukset riippuvat ostohetken mallista. GIGABYTE varaa itselleen oikeuden muutoksiin
Onnittelut GIGABYTE tietokoneen ostosta. Tämä käyttöohje auttaa sinua tietokoneesi käyttöönotossa. Lopullisen tuotteen asetukset riippuvat ostohetken mallista. GIGABYTE varaa itselleen oikeuden muutoksiin
KÄYTTÖOHJE ELTRIP-R6. puh. 08-6121 651 fax 08-6130 874 www.trippi.fi seppo.rasanen@trippi.fi. PL 163 87101 Kajaani
 KÄYTTÖOHJE ELTRIP-R6 PL 163 87101 Kajaani puh. 08-6121 651 fax 08-6130 874 www.trippi.fi seppo.rasanen@trippi.fi SISÄLLYSLUETTELO 1. TEKNISIÄ TIETOJA 2. ELTRIP-R6:n ASENNUS 2.1. Mittarin asennus 2.2. Anturi-
KÄYTTÖOHJE ELTRIP-R6 PL 163 87101 Kajaani puh. 08-6121 651 fax 08-6130 874 www.trippi.fi seppo.rasanen@trippi.fi SISÄLLYSLUETTELO 1. TEKNISIÄ TIETOJA 2. ELTRIP-R6:n ASENNUS 2.1. Mittarin asennus 2.2. Anturi-
Cross Touch (huom. vain CT-mallit)
") Cross Touch (huom. vain CT-mallit) Cross Touch on termi, joka kuvaa ONIX-laitteiden käyttöliittymää. Cross Touch on ominaisuus jonka avulla voit käyttää sekä kosketusnäyttöä että käyttönäppäimiä tehdäksesi
Cross Touch (huom. vain CT-mallit) Cross Touch on termi, joka kuvaa ONIX-laitteiden käyttöliittymää. Cross Touch on ominaisuus jonka avulla voit käyttää sekä kosketusnäyttöä että käyttönäppäimiä tehdäksesi
CMP-VOIP80. VoIP + DECT PUHELIN. English Deutsch Français Nederlands Italiano Español Magyar Suomi Svenska Česky ANLEITUNG MANUAL MODE D EMPLOI
 MANUAL MODE D EMPLOI MANUALE HASZNÁLATI ÚTMUTATÓ BRUKSANVISNING CMP-VOIP80 VoIP + DECT PUHELIN ANLEITUNG GEBRUIKSAANWIJZING MANUAL DE USO KÄYTTÖOHJE NÁVOD K POUŽITÍ Česky Svenska Suomi Magyar Español Italiano
MANUAL MODE D EMPLOI MANUALE HASZNÁLATI ÚTMUTATÓ BRUKSANVISNING CMP-VOIP80 VoIP + DECT PUHELIN ANLEITUNG GEBRUIKSAANWIJZING MANUAL DE USO KÄYTTÖOHJE NÁVOD K POUŽITÍ Česky Svenska Suomi Magyar Español Italiano
Tasohyppelypeli. Piirrä grafiikat. Toteuta pelihahmon putoaminen ja alustalle jääminen:
 Tasohyppelypeli 1 Pelissä ohjaat liikkuvaa ja hyppivää hahmoa vaihtelevanmuotoisessa maastossa tavoitteenasi päästä maaliin. Mallipelinä Yhden levelin tasohyppely, tekijänä Antonbury Piirrä grafiikat Pelaajan
Tasohyppelypeli 1 Pelissä ohjaat liikkuvaa ja hyppivää hahmoa vaihtelevanmuotoisessa maastossa tavoitteenasi päästä maaliin. Mallipelinä Yhden levelin tasohyppely, tekijänä Antonbury Piirrä grafiikat Pelaajan
Ulkoasu. 1.Objektiivi 2.Tallennuspainike 3.Kuvien ottopainike _ FIN 01
 Ulkoasu 3 2 1 1.Objektiivi 2.Tallennuspainike 3.Kuvien ottopainike FIN 01 13 4.Micro-USB-portti 10 12 11 6 7 8 9 4 5 5.Akun virtakytkin 6.Sivu ylös -painike 7.Virtapainike 8.OK-painike 9.Sivu alas -painike
Ulkoasu 3 2 1 1.Objektiivi 2.Tallennuspainike 3.Kuvien ottopainike FIN 01 13 4.Micro-USB-portti 10 12 11 6 7 8 9 4 5 5.Akun virtakytkin 6.Sivu ylös -painike 7.Virtapainike 8.OK-painike 9.Sivu alas -painike
Käyttöohje HERE Drive
 Käyttöohje HERE Drive 1.0. painos FI HERE Drive HERE Drive ohjaa sinut haluamaasi paikkaan ääniopastettujen reittiohjeiden avulla. Voit löytää kotimaassasi tai -alueellasi perille tarkkojen reittiohjeiden
Käyttöohje HERE Drive 1.0. painos FI HERE Drive HERE Drive ohjaa sinut haluamaasi paikkaan ääniopastettujen reittiohjeiden avulla. Voit löytää kotimaassasi tai -alueellasi perille tarkkojen reittiohjeiden
Omistajan käsikirja. Simrad IS20 Combi Instrument. Suomi
 Omistajan käsikirja Simrad IS20 Combi Instrument Suomi www.simrad-yachting.com A brand by Navico - Leader in Marine Electronics Omistajan käsikirja Simrad IS20 Combi Instrument Suomi Sw.1.2 Dokumentti
Omistajan käsikirja Simrad IS20 Combi Instrument Suomi www.simrad-yachting.com A brand by Navico - Leader in Marine Electronics Omistajan käsikirja Simrad IS20 Combi Instrument Suomi Sw.1.2 Dokumentti
President Randy II. Ohjekirjan versio: 3.5
 President Randy II Ohjekirjan versio: 3.5 Sisältö 1 Käyttöönotto 2 1.1 Radion asennus.................................... 2 2 Toiminnot 3 2.1 Näyttö.......................................... 4 2.2 Toimintokuvaukset...................................
President Randy II Ohjekirjan versio: 3.5 Sisältö 1 Käyttöönotto 2 1.1 Radion asennus.................................... 2 2 Toiminnot 3 2.1 Näyttö.......................................... 4 2.2 Toimintokuvaukset...................................
Contact Mobile Poca käyttöohje Android puhelimeen
 Contact Mobile Poca käyttöohje Android puhelimeen 1 SISÄLLYSLUETTELO 1 Yleistä... 3 2 Tilausvälityssovelluksen käynnistäminen... 3 3 Poca-sovelluksen aktivoiminen... 3 3.1 Toiminnon aktivoiminen:... 3
Contact Mobile Poca käyttöohje Android puhelimeen 1 SISÄLLYSLUETTELO 1 Yleistä... 3 2 Tilausvälityssovelluksen käynnistäminen... 3 3 Poca-sovelluksen aktivoiminen... 3 3.1 Toiminnon aktivoiminen:... 3
Samsung Galaxy Tab tietokoneen käyttöohje
 Tervetuloa käyttämään Samsungin Galaxy Tab tietokonetta Laitteen keskeinen ominaisuus on 7 tuuman kosketusnäyttö, jonka alapuolella ole neljä (4) taustavalaistua ohjausnäppäintä, ja yläpuolella 1.3 pixelin
Tervetuloa käyttämään Samsungin Galaxy Tab tietokonetta Laitteen keskeinen ominaisuus on 7 tuuman kosketusnäyttö, jonka alapuolella ole neljä (4) taustavalaistua ohjausnäppäintä, ja yläpuolella 1.3 pixelin
Saaristomerenkulun tutkinto Ratkaisuesimerkkejä
 Saaristomerenkulun tutkinto 11.12.2015 Ratkaisuesimerkkejä Tutkinnossa käytetty moottorivene on 13 metriä pitkä, sen syväys on 1,2 metriä ja korkeus 3,4 metriä. Veneen varustukseen kuuluu pääkompassin
Saaristomerenkulun tutkinto 11.12.2015 Ratkaisuesimerkkejä Tutkinnossa käytetty moottorivene on 13 metriä pitkä, sen syväys on 1,2 metriä ja korkeus 3,4 metriä. Veneen varustukseen kuuluu pääkompassin
TiiMi Talotekniikka. LATTIALÄMMITYS- TERMOSTAATTI TiiMi 7250TL. v. 1.0
 TiiMi Talotekniikka LATTIALÄMMITYS- TERMOSTAATTI TiiMi 7250TL v. 1.0 TiiMi Lattialämmitys on monipuolinen vesikiertoisen lattialämmityksen säätöjärjestelmä jota voidaan soveltaa myös sähköiseen lattialämmitykseen.
TiiMi Talotekniikka LATTIALÄMMITYS- TERMOSTAATTI TiiMi 7250TL v. 1.0 TiiMi Lattialämmitys on monipuolinen vesikiertoisen lattialämmityksen säätöjärjestelmä jota voidaan soveltaa myös sähköiseen lattialämmitykseen.
Elektroninen ohjausyksikkö
 Elektroninen ohjausyksikkö MALLI CITY Käyttäjän käsikirja Asennus Toiminnot Vasatherm Finland Oy Puh: +358 (0)9 4730 6190 Pihatörmä 1 A Fax: + 358 (0)9 4730 6201 02240 Espoo E-mail: etunimi.sukunimi@vasatherm.fi
Elektroninen ohjausyksikkö MALLI CITY Käyttäjän käsikirja Asennus Toiminnot Vasatherm Finland Oy Puh: +358 (0)9 4730 6190 Pihatörmä 1 A Fax: + 358 (0)9 4730 6201 02240 Espoo E-mail: etunimi.sukunimi@vasatherm.fi
testo 410-1 Käyttöohje
 testo 410-1 Käyttöohje FIN 2 Short manual testo 410-1 Pikaohje testo 410-1 1 Suojakansi: käyttöasento 2 Siipipyörä 3 Lämpötilasensori 4 Näyttö 5 Toimintonäppäimet 6 Paristokotelo (laitteen takana) Perusasetukset
testo 410-1 Käyttöohje FIN 2 Short manual testo 410-1 Pikaohje testo 410-1 1 Suojakansi: käyttöasento 2 Siipipyörä 3 Lämpötilasensori 4 Näyttö 5 Toimintonäppäimet 6 Paristokotelo (laitteen takana) Perusasetukset
135 & 145 sarja. Väärennetyn rahan tunnistin. Manuaalinen
 135 & 145 sarja Väärennetyn rahan tunnistin Manuaalinen Käyttöohje Safescan 135i, 135ix & 145ix Väärennetyn rahan tunnistin Onnittelut Safescan 135i, 135ix tai 145ix väärennetyn rahan tunnistimen hankinnan
135 & 145 sarja Väärennetyn rahan tunnistin Manuaalinen Käyttöohje Safescan 135i, 135ix & 145ix Väärennetyn rahan tunnistin Onnittelut Safescan 135i, 135ix tai 145ix väärennetyn rahan tunnistimen hankinnan
TECH 700 DA. How true pro s measure. Käyttöohje.
 TECH 700 DA How true pro s measure Käyttöohje www.stabila.com Sisällysluettelo Luku Sivu 1. Tarkoituksen mukainen käyttö 3 2. Laitteen osat 3 3. Paristojen asettaminen / paristojen vaihto 4 4. Käyttöönotto
TECH 700 DA How true pro s measure Käyttöohje www.stabila.com Sisällysluettelo Luku Sivu 1. Tarkoituksen mukainen käyttö 3 2. Laitteen osat 3 3. Paristojen asettaminen / paristojen vaihto 4 4. Käyttöönotto
Nexetic Shield Unlimited
 Nexetic Shield Unlimited Käyttöohje 1. Asennus ja käyttöönotto 2. Ohjelman käyttäminen 3. Lisäasetukset 4. Tietojen palautus 1. Asennus ja käyttöönotto Asiakasohjelman asennus Tehtyäsi tilauksen varmistusohjelmasta
Nexetic Shield Unlimited Käyttöohje 1. Asennus ja käyttöönotto 2. Ohjelman käyttäminen 3. Lisäasetukset 4. Tietojen palautus 1. Asennus ja käyttöönotto Asiakasohjelman asennus Tehtyäsi tilauksen varmistusohjelmasta
KÄYTTÖOPAS. EvoBike LCD-näyttö
 KÄYTTÖOPAS EvoBike LCD-näyttö Tekniset tiedot Näyttötyyppi: LCD IPS Koko: 2,2 IP-luokitus: IP65 Käyttölämpötila: -20 C ja +70 C välillä Säilytyslämpötila: -30 C ja +80 C välillä Sertifioitu CE- ja ROHS-
KÄYTTÖOPAS EvoBike LCD-näyttö Tekniset tiedot Näyttötyyppi: LCD IPS Koko: 2,2 IP-luokitus: IP65 Käyttölämpötila: -20 C ja +70 C välillä Säilytyslämpötila: -30 C ja +80 C välillä Sertifioitu CE- ja ROHS-