Malliprediktiivinen säädin konttinosturille. Laboratoriotyön ohje. Olli Sjöberg Eero Vesaoja
|
|
|
- Hannes Leppänen
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 Malliprediktiivinen säädin konttinosturille Laboratoriotyön ohje Olli Sjöberg Eero Vesaoja

2 Contents 1 Johdanto 2 2 MPC säädin 4 21 MPC:n yleinen toimintaperiaate 4 22 LQ-säätimen perusteet 5 23 MPC optimoituna LQ-teorian avulla 6 24 MPC säädin tässä työssä 8 3 Malli 9 31 Mekaaninen malli 9 32 Mallin linearisointi Mallin diskretointi 11 4 Käyttöliittymä 12 1

3 1 Johdanto Järjestelmästä luotua mallia käytetään säätösuunnittelussa moniin eri tarkoituksiin Mallin avulla voidaan muun muossa simuloida ja ennustaa järjestelmän toimintaa eri tilanteissa Säädön kannalta erityisen tärkeä mallin ominaisuus on sen ennustuskyky Mallin avulla voidaan ennustaa järjestelmän toimintaa erilaisten syötteiden funktiona ja tämän avulla syötteet voidaan valita siten, että järjestelmän toiminta saadaan halutunlaiseksi Tässä voidaan käyttää esimerkiksi jotakin matemaattista kriteeriä, jonka suhteen mallin toimintaa halutaan optimoida Juuri tähän perustuu malliprediktiivinen säädin (MPC), jossa järjestelmästä tehtyä mallia käytetään tulevien ulostulojen ennustamiseen Ulostulot sitten optimoidaan herätteiden suhteen siten, että järjestelmä saadaan toimimaan suunnittelijan haluamalla tavalla Tässä harjoituksessa toteutetaan malliprediktiivinen säädin konttinosturille ja säädin optimoidaan käyttäen neliöllistä kustannusfunktiota Tässä työssä malliprediktiivistä säädintä käytetään konttinosturin ohjauksessa Konttinostureita käytetään muun muassa satamissa (ks kuva 1) konttien siirtelyyn sekä teollisuudessa raskaiden tavaroiden siirtämiseen teollisuushalleissa Oikeat nosturit voivat olla kooltaan kymmenien, jopa satojen metrien pituisia Laboratoriotyö käsittelee konttinosturin pienoismallia (25 m x 08 m), jolla voidaan siirtää konttia kahdessa suunnassa (vaakaja pystysuunta) Työssä tarkastellaan kontin siirron säätöä vakiokuormalla, vaikkakin todellisuudessa kuorma luonnollisesti vaihtelee siirrosta toiseen Työssä keskitytään virittämään säätö siten, että kontti seuraa mahdollisimman tarkasti referenssitrajektoria, mutta samalla pyritään pitämään siirtonopeus kohtuullisena Konttinosturia ohjaa kaksi erillistä moottoria Vaunumoottori liikuttaa liukujohteeseen kiinnitettyä vaunua vaakasuunnassa (ks kuva 2) Johdetta pitkin liikkuvaan vaunuun on kiinnitetty nostomoottori, jolla konttia voidaan siirtää pystysuunnassa Kontti roikkuu nostomoottoriin kiinnitetyn narun varassa Järjestelmän säädön tavoitteena on, että nosturi vie kontin halutusta alkutilasta (paikka) haluttuun lopputilaan mahdollisimman nopeasti huomioiden edessä olevat mahdolliset esteet sekä minimoi kontin heilahtelut 2
, jossa järjestelmästä tehtyä mallia käytetään tulevien ulostulojen ennustamiseen Ulostulot sitten optimoidaan herätteiden suhteen siten, että järjestelmä saadaan")

4 Figure 1: Konttinosturi Figure 2: Konttinosturin pienoismalli 3

5 2 MPC säädin 21 MPC:n yleinen toimintaperiaate Säätimen toimintaperiaate tulee hyvin esille kuvasta 3 Säätimelle on määritetty erikseen ohjaushorisontti ja ennustushorisontti Mallilla ennustetaan järjestelmän toimintaa ja pyritään saamaan aikaan sellaiset ohjaukset, että järjestelmä käyttäytyisi halutulla tavalla tavalla Yleinen tavoite säädössä on, että järjestelmä seuraisi referenssitrajektoria mahdollisimman tarkasti Tässä työssä halutaan minimoida neliöllinen kustannusfunktio, jolla pyritään minimoimaan sekä ohjauksen muutosta, että virhettä todellisen sijainnin ja referenssin välillä Kuvasta näkee, kuinka ohjaushorisontti voidaan asettaa huomattavasti lyhyemmäksi kuin ennustehorisontti Ohjaushorisontin jälkeiselle ajalle käytetään yleensä viimeisintä ennustettua ohjausta Figure 3: MPC:n toiminta Yleistä malliprediktiivistä säädintä voidaan ajatella menetelmänä, jossa kokeillaan prosessista tehdyn mallin avulla, millaista sen käytös tulisi erilaisilla herätteillä olemaan Näistä herätteistä etsitään jollain vapaasti valittavalla algoritmilla paras tietyn kriteerin mukaan Yleisimmässä mahdollisessta tapauksessa malli, optimointimenetelmä ja kriteeri kaikki voivat olla hyvin erilaisia Malli voi esimerkiksi olla siirtofunktio, tilaesitys, logiikkakone, neuroverkko tai vaikka pieni koelaitos, joka muistuttaa prosessia Optimointialgoritmi samoin voi periaattessa olla hyvinkin vaihteleva Yleisimpiä mentelmiä ovat LQ-säätö ja QP menetelmät Myös erilaisia gradienttihakuja tai vaikka neuroverkkoja voidaan käyttää optimoinnissa Kustannusfunktiot 4

6 yleensä valitaan olemaan positiviisia, monotonisia ajan funktioita Yleensä ne ovat integraaleja positiivisista luvuista Tyypillisimpiä käytettyjä ovat integral square error, ISE, integral absolute error, IAE ja integral time square error, ITSE Kustannus voidaan laskea joko absoluuttisesta ohjauksen tasosta, tai muutoksesta ohjaussuureeseen Rajoitukset ohjauksessa johtavat usein monimutkaisempien optimointialgoritmien käyttöön Käytännössä MPC on lähes aina diskreettiaikainen laskentalgoritmi, jossa tietyn pituisen ennustushorisontin matkalta etsitään tietyn pituisella optimointihorisontilla parhaat ohjauset minimoimaan kustannusfunktion Kustannusfunktio on lähes aina referenssin ja ulostulon välisestä erosta riippuvainen Horisonteista optimointihorisontti alkaa seuraavasta askelesta ja pitäisi olla pituudeltaa riittävä, että hitaampiinkin prosessin ilmiöihin voidaan vaikuttaa Optimoidun ohjausten sarjan ensimmäistä alkiota käytetään säätimen ulostuossa Ennustushorisontti valitaan alkamaan prosessin viiveen mukaan Viiveajalta ei kannata kustannusta laskea, koska siihen ei enää voi vaikuttaa Ennustushorisontin tulee olla niin pitkä, että prosessin käytös ehtii siinä rauhottua riittävästi Esimerkiksi kaksi-kymmenen kertaa prosessin aikavakio Pituuksia rajoittaa ylhäältä laskentatehot ja mallin tarkkuus Liian pitkät horisontit tuottavat pidempiä laskuja kuin säätimen diskretointiväli ja epätarkka malli saattaa divergoida pitkissä ennusteissa, jolloin laskennalliset ongelmat voivat pilata säädön 22 LQ-säätimen perusteet Kuten edellisessä luvussa mainittiin, MPC:n toiminnan voi optimoida haluamallaan tavalla Tässä työssä on käytetty LQ-teoriaa (linear quadratic) säätimen optimoimiseen ja siksi on hyvä käsitellä perinteisen LQ-säädön ideaa lyhyesti Karkeasti voidaan sanoa, että LQ-säädin on lineaariselle järjestelmälle toteutettava tilatakaisinkytentä, joka minimoi neliöllisen kustannusfunktion: J = 1 2 tf t 0 e T (t)qe(t) + u(t) T Ru(t)dt, (1) missä e(t) on erosuure ulostulon ja referenssin välillä, u(t) on ohjausvektori, Q on painomatriisi ulostuloille ja R on painomatriisi ohjaukselle Säätimessä Q ja R ovat viritysparametreja, joiden avulla säätimen toimintaa voidaan optimoida halutuksi Q-matriisin kasvattaminen aiheuttaa referenssin voimakkaamman seuraamisen, mutta samalla aiheuttaa myös ohjaussignaalin kasvamisen Vastaavasti asettamalla suurempi paino ohjauksille R- matriisin avulla, optimoidaan ohjaussignaalia, mutta tämä johtaa helposti laiskempaan referenssin seuraamiseen Koska tässä työssä optimointi on tehty LQ-menetelmällä, toimivat painomatriisit Q ja R vastaavalla tavalla 5

7 23 MPC optimoituna LQ-teorian avulla Prosessin ennustuksessa käytetty malli ei koskaan ole täydellinen, vaan ennusteessa on jonkin verran virhettä verrattuna todelliseen järjestelmään Virheet kasautuvat sitä suuremmiksi, mita kauemmaksi järjestelmän toimintaa ennustetaan Lisäksi ulkoiset häiriöt voivat vaikuttaa ohjattavan prosessin toimintaan Tämän vuoksi jokaisella iteraatiokierroksella lasketaan järjestelmän ennuste uudestaan ja näistä ennusteista käytetään vain ensimmäistä ohjausta varsinaisen prosessin ohjaukseen Toisin sanoen mallin avulla ennustetaan jokaisella iteraatiokierroksella optimaalinen ohjaussarja, mutta näistä ohjauksista vain ensimmäinen toteutetaan Sama logiikka toteutetaan myös seuraavalla kierroksella Minivoitavana kustannuksena käytetään tässä projektissa neliöllistä kustannusfunktiota (LQ-teoriasta), joka on käytännössäkin hyvin yleinen kriteeri: V (k) = H p i=h w ẑ(k + i k) ˆr(k + i k) 2 Q(i) + = Z(k) T (k) 2 Q + U(k) 2 R H u 1 i=0 û(k + i k) 2 R(i), (2) missä vektori Z(k) sisältää ennustetut vasteet, T (k) halutun trajektorin ja U(k) on vektori, jossa on kunkin ohjauksen muutokset Kaavan perusteella nähdään, että tarkoituksena on saada ohjaus mahdollisimman lähelle referenssisignaalia, mutta samanaikaisesti halutaan varmistaa, että ohjaukset eivät kasva liian suuriksi Kustannuksen painoa ohjauksen ja vasteen välillä voidaan muuttaa säätämällä Q ja R matriiseja LQ menetelmän vuoksi ei tulos ole optimaalinen, jos ohjauksissa on rajoituksia, mikäli niihin törmätään Tätä voidaan vältellä asettamalla R matriisi suuremmaksi, kunnes ohjaukset eivät enää leikkaannu missään toiminnan vaiheessa Tämä tosin hidastaa säätöä muuten Q ja R ovat painomatriisit, joilla säätimen toimintaan voidaan vaikuttaa Ne koostuvat lohkoista, jotka ovat ulostulojen ja ohjausten kokoisia neliömatriiseita Neliömatriisit painottavat siis kunkin ulostulon virheestä referenssiin nähden tai ohjauksen muutoksesta johtuvaa kustannusta Myös ristikkäisiä kustannuksia niiden välillä välillä voidaan käyttää Neliömatriisit voivat olla erilaisia eri askeleille Esimerkiksi kustannukset voidaan laittaa kasvamaan tai vaimenemaan tulevaisuudessa eksponentiaalisesti tai lineaarisesti Lohkomatriisien koot määräytyvät horisonttien pituuksista Q(H w ) 0 0 Q = 0 Q(H w + 1) (3) Q(H p ) 6

8 R(0) 0 0 R = 0 R(1) R(H u 1) Säätimen kaavoista ei suoraan näe, että niiden avulla minimoidaan kyseinen kustannusfunktio, sillä kustannuksen toteuttava ohjaus voidaan laskea analyyttisesti, jolloin ohjauksesta tulee tavallinen tilatakaisinkytkentä Toiminta ja käytetyt muuttujat tulevat luultavasti parhaiten selville, jos niitä käy järjestyksessä läpi Säätimen toiminta lähtee liikkeelle mallin ennustaman trajektorin laskemisesta: (4) Z(k) = Ψˆx(k k) + Γu(k 1) + Θ U(k), (5) missä matriisi Ψ kuvaa sitä, miten ulostulot muodostuvat tiloista eri tuleville hetkille, Γ kuvaa miten edellinen ohjaus vaikuttaa tuleviin ulostuloihin ja Θ kuvaa sitä, miten tulevat ohjauksen vaihtelut vaikuttavat tuleviin ulostulohoin Ψ on kahden lohkomatriisin tulo Ensimmäisessä on diagonaalilla C matriiseja muiden alkioiden ollessa nollia Tämä kuvaa siis kunkin tilavektorin ulostuloksi Toisessa on nousevia potensseja A matriisista Se kuvaa miten tila autoregressiivisesti muuttuu alussa olevasta eteenpäin Tämän matriisin alkiot saattavat helposti divergoida, mikäli tilansiirtomatriisin ominaisarvot ovat liian suuria C z 0 0 A Ψ = 0 C z 0 A Hp 0 0 C z ˆx(k k) (6) Matriisissa Γ myöskin on edessä vastaava C matriisien lohkodiagonaali Sen toinen osa on B matriisi kerrottuna nousevilla potensseilla A matriisista C z 0 0 B Γ = 0 C z u(k) (7) 0 Hp 1 i=0 A i B 0 0 C z Lopuksi vielä tulee laskea Θ matriisi: C z 0 0 B 0 Γ = 0 C z 0 Hp 1 i=0 A i Hp H B u i=0 A i B 0 0 C z 7 û(k k) û(k + H u 1 k) (8) u(k)

9 Näiden matriisien avulla säädin osaa estimoida tulevia aika-askelia Matriisien dimensiot määrittyvät horisonttien ja järjestelmän dimensioiden mukaan Seuraavaksi alkaa optimaalisen ohjauksen laskeminen Se saadaan tutkimalla tulevia erosuureita Erosuureen laskeminen voidaan esittää käyttämällä yllä olevia merkintöjä seuraavasti: ε(k) = T (k) Ψˆx(k k) Γu(k 1) (9) Tämän jälkeen voidaan optimaalinen ohjauksen muutos laskea käyttämällä seuraavia kaavoja: U (k) = 1 2 H 1 G G = 2Θ T Qε (10) H = Θ T QΘ + R 24 MPC säädin tässä työssä Tässä työssä käytetään konttinosturin mallista johdettua lineaarista mallia tässä luvussa johdetun lineaarisen MPC:n avulla Seuraavassa kuvassa näkyy rakenne, jota työssä käytetään Todellisessa prosessissa vihreä lohko korvaantuu oikealla järjestelmällä ja mittauksilla Mallissa kuitenkaan ei mitään häiriöitä ole, eli se on deterministinen Todellisen järjestelmän häiriöitä mittauksissa on pyritty minimoimaan Figure 4: Säätöjärjestelmän Simulink-malli 8

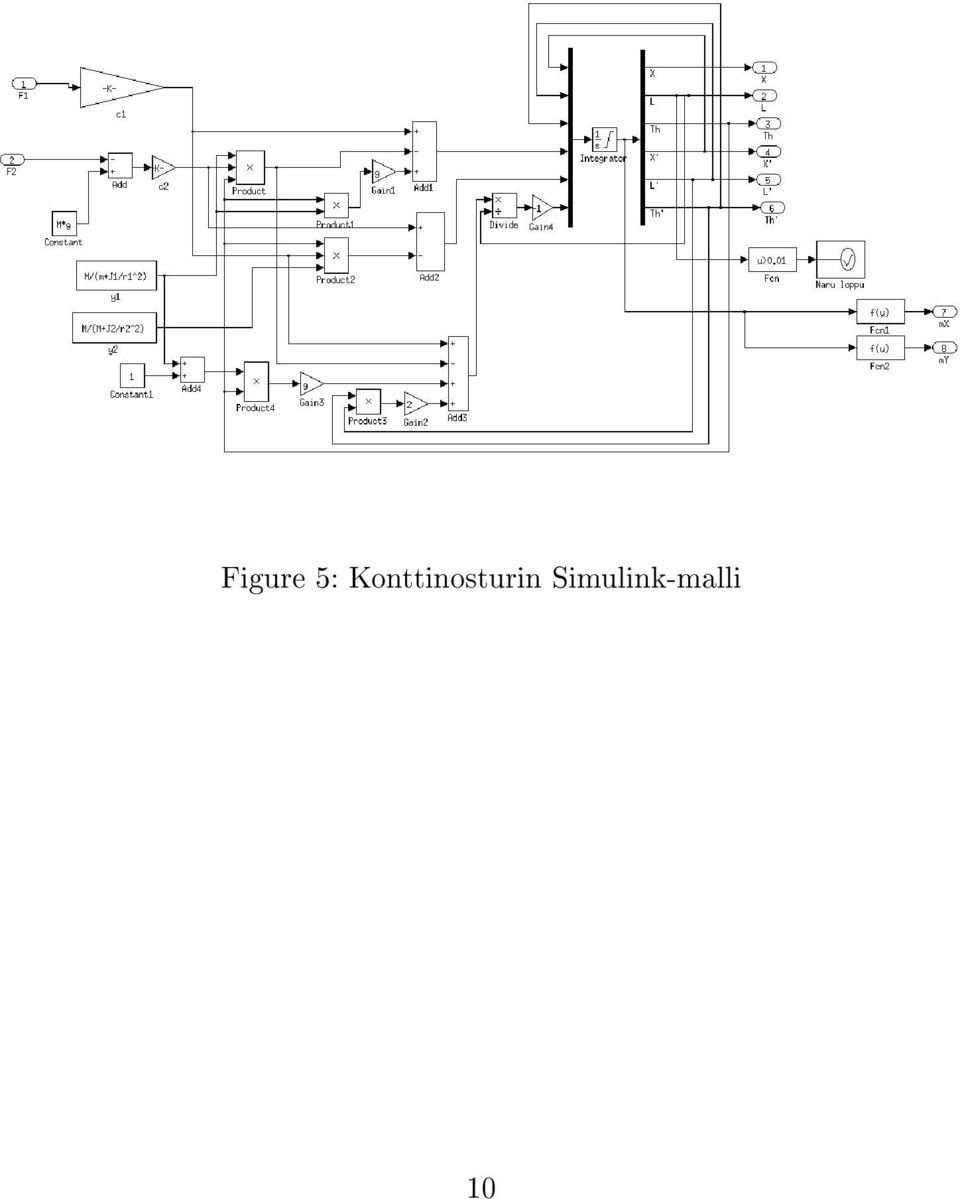
10 3 Malli 31 Mekaaninen malli Konttinosturin mallintamisessa käytetään seuraavia muuttujia: θ 1 [rad] on vaunumoottorin akselin kiertokulma (vaunun paikka d = r 1 θ 1, missä r 1 on liukujohteen akselin säde), θ 2 [rad] on nostomoottorin akselin kiertokulma (narun pituus l = r 2 θ 2, missä r 2 on nostomoottorin väkipyörän säde, jonka ympärille naru siis kiertyy) sekä Φ [rad] on narun absoluuttinen kulma Konttinosturin mekaniikkamalliksi saadaan Euler-Langrange-yhtälöiden perusteella: d dt d dt d dt ( L θ 1 ( L θ 2 ( L Φ ) L ) L θ 1 = N 1 D 1 (11) = N 2 D 2 (12) θ 2 ) L Φ = N 1 D 1 (13) Yhtälöissä L on ns Lagrangen funktio, L = T U, missä T on liikeenergia ja U on potentiaalienergia N i ovat moottorien tuottamat vääntömomentit, D i ovat systeemiin vaikuttavat kitkat ja J i ovat moottorien hitausmomentit Muuttujat m v ja m k ovat vaunun sekä kontin massat ja r i moottorien akselien säteet Merkinnöissä indeksi i = 1 viittaa vaunumoottoriin ja i = 2 nostomoottoriin Näistä saadaan muokattua tilaesitys, joka kuvaa prosessia moottorien sisääntuloista kontin paikkaan Näiden yhtälöiden avulla voidaan kirjottaa tilaesitys prosessille ja muotoilla se integerattorin avulla Simulinkkiin Mallissa on kaksi sisääntuloa, moottorien lähdöt ja kaksi ulostuloa, kontin x ja y paikka Tiloja on kuusi: x eli vaunun paikka, L eli narun pituus ja θ, eli narun kulma Kunkin näiden ensimmäinen derivaatta on toinen tila Saatu malli on seuraava kuvassa 5: 9

11 Figure 5: Konttinosturin Simulink-malli 10
12 32 Mallin linearisointi Malliprediktiivistä säätöä varten pitää olla käytettävissä malli säätimelle Säädin käyttää tätä mallia prosessin tulevan tilan ennustamiseen Prosessin tulevan tilan ennustamista tarvitaan, kun tulevia säätimen ulostuloja optimoidaan Tätä mallia voisi periaatteessa käyttää suoraan MPC:ssä mallina, mutta jotta laskenta olisi tarpeeksi nopeaa xpc-target tietokoneelle, on käytettävä yksinkertaisempaa lineaarista mallia Malli pitää siis linearisoida toimintapisteisiin Epälineaarisen tilaesityksen ẋ(t) = f(x(t), u(t), t) (14) y(t) = h(x(t), t) linearisointi tehdään Jacobin matriisin avulla Kunkin tilan ja ohjauksen vaikutukset tilojen derivaattoihin ratkaistaan osittaisderivoimalla epälineaarista funktioita eri tilojen tai ohjausten funktiona toimintapisteessä (15) Näistä osittaisderivaatoista kasataan dynamiikka ja ohjausmatriisit jatkuva-aikaiselle lineaariselle prosessille Tunnettu tila sijoitetaan, jolloin saadaan vakiomatriisit f 1 x 1 ẋ(t) = f m x 1 h 1 x 1 y(t) = h p x 1 33 Mallin diskretointi f 1 x n f m x n h 1 x n h p x n f x 1 1 u 1 + x f n n u m x 1 x n f 1 u m f n u m u 1 u m (15) Diskreettiaikainen säädin tarvitsee diskreettiaikaisen mallin, joten saadut tilaesityksen matriisit tulee vielä diskretoida Se voidaan tehdä useilla eri menetelmillä, esimerkiksi nollannen kertaluvun pidolla Diskretointi säätimessä suoritetaan Control Systems Toolboxin c2d-funktiolla Yleinen tapa analyyttisesti diskretoida jatkuvia viiveettömiä tilaesityksiä on tilansiirtomatriisien laskenta matriisieksponentin ja integroinnin avulla, kun tunnetaan jatkuva järjestelmä: ẋ(t) = Ax(t) + Bu(t) (16) y(t) = Cx(t) Voidaan vastaava diskreettiaikainen järjestelmä laskea seuraavasti: { x(kh + h) = Φ(h)x(kh) + Γ(h)u(kh), (17) y(kh) = Cx(kh) + Du(kh) 11

13 missä matriisit Φ(h) ja Γ(h) saadaan seuraavista yhtälöistä: Φ(h) = e Ah Γ(h) = h 0 e As dsb (18) Saatu diskreettiaikainen, lineaarinen, aikainvariantti tilaesitys soveltuu säätimen käyttöön Tässä muodossa olevaa prosessia voidaan optimoida LQ, eli lineaarikvadraattisen teorian perusteella, mikäli ohjauksia ei ole rajoitettu Yleisempi menetelmä ratkaista neliöllisiä kustannusfunktio-ongelmia on QP eli quadratic programmin menetelmät LQ laskenta on huomattavan nopeaa verrattuna yleisempiin tilanteisiin ja riittää tässä tarkuudeltaa hyvin 4 Käyttöliittymä Työssä on apuna yksinkertainen käyttöliittymä, jonka avulla voidaan asettaa säätimelle helposti tarvittavat parametrit, sekä tarkastella säätimen toimintaa asettamillaan parametreilla Koska käyttöliittymän käyttäminen ei välttämättä ole täysin ilmeistä, tässä on pieni ohje alkuun pääsemiseksi Parametripanellin yläreunassa olevan Tavoiteaika-tekstikentän avulla voidaan asettaa tavoitteellinen aika, joka kontilta kuluu lähtöpaikasta loppuun Huomioi, että nopeampi siirto aiheuttaa helpommin konttiin heiluntaa ja mahdollisesti jopa ohjauksen epäonnistumisen Hp-, Hw- ja Hu-tekstikenttien avulla voidaan asettaa prediktio- sekä ohjaushorisonttien pituudet Pidemmät horisontit parantavat ohjauksen laatua tiettyyn pisteeseen asti, mutta tekevät ohjauksen laskemisesta huomattavasti raskaampaa Liian pitkät horisontit tuottavat ohjausen laskemisessa hyvin suuria matriiseja ja laskenta saattaa tämän vuoksi epäonnistua Q i - ja R i -tekstikenttien avulla voidaan asettaa painomatriisit ulostulon ja ohjauksen optimoimiseksi Q i :n arvolla asetetaan painot järjestelmän ulostulolle x- ja y-suunnissa Painomatriiseilla on kaksi tekstikenttää, jotta painoa voi laittaa halutessaan enemmän ennustushorisontin alku- tai loppupuolelle Suuri painoarvo prediktiohorisontin alussa aiheuttaa tarkan referenssin seuraamisen ennusteen alussa kun taas lopussa pieni virhe ei aiheuta niin suurta kustannuksen kasvua Painot muuttuvat alku- ja loppupainon välillä lineaarisesti Vastaavasti R i -tekstikenttien avulla voidaan optimoida moottorien toimintaa 12

Malliprediktiivinen säädin konttinosturille. Väliraportti
 Malliprediktiivinen säädin konttinosturille Väliraportti Olli Sjöberg Eero Vesaoja 67167C 67330B 1 Johdanto Järjestelmästä luodun mallin avulla voidaan simuloida ja ennustaa järjestelmän toimintaa eri
Malliprediktiivinen säädin konttinosturille Väliraportti Olli Sjöberg Eero Vesaoja 67167C 67330B 1 Johdanto Järjestelmästä luodun mallin avulla voidaan simuloida ja ennustaa järjestelmän toimintaa eri
Harjoitus 6: Simulink - Säätöteoria. Syksy 2006. Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1
 Harjoitus 6: Simulink - Säätöteoria Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen säätötekniikkaan Takaisinkytkennän
Harjoitus 6: Simulink - Säätöteoria Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen säätötekniikkaan Takaisinkytkennän
Malliprediktiivinen säädin konttinosturille
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt, 3 op Malliprediktiivinen säädin konttinosturille Olli Sjöberg Eero Vesaoja 1. Suunnitelma 1.1. Tavoite, MPC:n käyttö Projektin päätavoitteena oli
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt, 3 op Malliprediktiivinen säädin konttinosturille Olli Sjöberg Eero Vesaoja 1. Suunnitelma 1.1. Tavoite, MPC:n käyttö Projektin päätavoitteena oli
Dynaamisten systeemien teoriaa. Systeemianalyysilaboratorio II
 Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
x = ( θ θ ia y = ( ) x.
 x.") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2429 Systeemien Identifiointi 5 harjoituksen ratkaisut Esitetään ensin systeemi tilayhtälömuodossa Tiloiksi valitaan
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2429 Systeemien Identifiointi 5 harjoituksen ratkaisut Esitetään ensin systeemi tilayhtälömuodossa Tiloiksi valitaan
Tilaesityksen hallinta ja tilasäätö. ELEC-C1230 Säätötekniikka. Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus
 Tilaesityksen hallinta ja tilasäätö ELEC-C1230 Säätötekniikka Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus Edellisessä luvussa tarkasteltiin napoja ja nollia sekä niiden vaikutuksia
Tilaesityksen hallinta ja tilasäätö ELEC-C1230 Säätötekniikka Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus Edellisessä luvussa tarkasteltiin napoja ja nollia sekä niiden vaikutuksia
2. kierros. 2. Lähipäivä
 2. kierros 2. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Tavoitteet: tietää Yhden navan vasteen ekvivalentti kohinakaistaleveys Vastuksen terminen kohina Termit
2. kierros 2. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Tavoitteet: tietää Yhden navan vasteen ekvivalentti kohinakaistaleveys Vastuksen terminen kohina Termit
MATLAB harjoituksia RST-säädöstä (5h)
") Digitaalinen säätöteoria MATLAB harjoituksia RST-säädöstä (5h) Enso Ikonen Oulun yliopisto, systeemitekniikan laboratorio November 25, 2008 Harjoituskerran sisältö kertausta (15 min) Napojensijoittelu
Digitaalinen säätöteoria MATLAB harjoituksia RST-säädöstä (5h) Enso Ikonen Oulun yliopisto, systeemitekniikan laboratorio November 25, 2008 Harjoituskerran sisältö kertausta (15 min) Napojensijoittelu
Mat Dynaaminen optimointi, mallivastaukset, kierros 1
 Mat-214 Dynaaminen optimointi, mallivastaukset, kierros 1 1 a) Sekoitussäiliöön A virtaa puhdasta vettä virtauksella v A, säiliöstä A säiliöön B täysin sekoittunutta liuosta virtauksella v AB ja säiliöstä
Mat-214 Dynaaminen optimointi, mallivastaukset, kierros 1 1 a) Sekoitussäiliöön A virtaa puhdasta vettä virtauksella v A, säiliöstä A säiliöön B täysin sekoittunutta liuosta virtauksella v AB ja säiliöstä
v AB q(t) = q(t) v AB p(t) v B V B ṗ(t) = q(t) v AB Φ(t, τ) = e A(t τ). e A = I + A + A2 2! + A3 = exp(a D (t τ)) (I + A N (t τ)), A N = =
 = q(t) v AB p(t) v B V B ṗ(t) = q(t) v AB Φ(t, τ) = e A(t τ). e A = I + A + A2 2! + A3 = exp(a D (t τ)) (I + A N (t τ)), A N = =") Mat-214 Dynaaminen optimointi Mitri Kitti Mallivastaukset kierros 1 1 a) Sekoitussäiliöön A virtaa puhdasta vettä virtauksella v A säiliöstä A säiliöön B täysin sekoittunutta liuosta virtauksella v AB
Mat-214 Dynaaminen optimointi Mitri Kitti Mallivastaukset kierros 1 1 a) Sekoitussäiliöön A virtaa puhdasta vettä virtauksella v A säiliöstä A säiliöön B täysin sekoittunutta liuosta virtauksella v AB
Y (z) = z-muunnos on lineaarinen kuten Laplace-muunnoskin
 = z-muunnos on lineaarinen kuten Laplace-muunnoskin") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 3. harjoituksen ratkaisut. Vapaan vasteen löytämiseksi asetetaan ohjaukseksi u(t)
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 3. harjoituksen ratkaisut. Vapaan vasteen löytämiseksi asetetaan ohjaukseksi u(t)
Säätötekniikkaa. Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla
 ohjaus, joka saa systeemin toimimaan halutulla tavalla") Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät, Systeemitekniikka Feb 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät, Systeemitekniikka Feb 2019
(s 2 + 9)(s 2 + 2s + 5) ] + s + 1. s 2 + 2s + 5. Tästä saadaan tehtävälle ratkaisu käänteismuuntamalla takaisin aikatasoon:
![(s 2 + 9)(s 2 + 2s + 5) ] + s + 1. s 2 + 2s + 5. Tästä saadaan tehtävälle ratkaisu käänteismuuntamalla takaisin aikatasoon:](/thumbs/58/41295146.jpg "(s 2 + 9)(s 2 + 2s + 5) ] + s + 1. s 2 + 2s + 5. Tästä saadaan tehtävälle ratkaisu käänteismuuntamalla takaisin aikatasoon:") TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2429 Systeemien Identifiointi 2 harjoituksen ratkaisut Yhtälö voitaisiin ratkaista suoraankin, mutta käytetään Laplace-muunnosta tehtävän ratkaisemisessa
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2429 Systeemien Identifiointi 2 harjoituksen ratkaisut Yhtälö voitaisiin ratkaista suoraankin, mutta käytetään Laplace-muunnosta tehtävän ratkaisemisessa
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
Harjoitustyö 3. Heiluri-vaunusysteemin parametrien estimointi
 Aalto-yliopiston perustieteiden korkeakoulu Systeemianalyysin laboratorio Mat-2.4129 Systeemien identifiointi Harjoitustyö 3 Heiluri-vaunusysteemin parametrien estimointi Yleistä Systeemianalyysin laboratoriossa
Aalto-yliopiston perustieteiden korkeakoulu Systeemianalyysin laboratorio Mat-2.4129 Systeemien identifiointi Harjoitustyö 3 Heiluri-vaunusysteemin parametrien estimointi Yleistä Systeemianalyysin laboratoriossa
Tilayhtälötekniikasta
 Tilayhtälötekniikasta Tilayhtälöesityksessä it ä useamman kertaluvun differentiaaliyhtälö esitetään ensimmäisen kertaluvun differentiaaliyhtälöryhmänä. Jokainen ensimmäisen kertaluvun differentiaaliyhtälö
Tilayhtälötekniikasta Tilayhtälöesityksessä it ä useamman kertaluvun differentiaaliyhtälö esitetään ensimmäisen kertaluvun differentiaaliyhtälöryhmänä. Jokainen ensimmäisen kertaluvun differentiaaliyhtälö
Säätötekniikkaa. Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla
 ohjaus, joka saa systeemin toimimaan halutulla tavalla") Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Y (s) = G(s)(W (s) W 0 (s)). Tarkastellaan nyt tilannetta v(t) = 0, kun t < 3 ja v(t) = 1, kun t > 3. u(t) = K p y(t) K I
 = G(s)(W (s) W 0 (s)). Tarkastellaan nyt tilannetta v(t) = 0, kun t < 3 ja v(t) = 1, kun t > 3. u(t) = K p y(t) K I") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 6. harjoituksen ratkaisut. Laplace-tasossa saadaan annetulle venttiilille W (s) W (s)
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 6. harjoituksen ratkaisut. Laplace-tasossa saadaan annetulle venttiilille W (s) W (s)
A ja B pelaavat sarjan pelejä. Sarjan voittaja on se, joka ensin voittaa n peliä.
 Esimerkki otteluvoiton todennäköisyys A ja B pelaavat sarjan pelejä. Sarjan voittaja on se, joka ensin voittaa n peliä. Yksittäisessä pelissä A voittaa todennäköisyydellä p ja B todennäköisyydellä q =
Esimerkki otteluvoiton todennäköisyys A ja B pelaavat sarjan pelejä. Sarjan voittaja on se, joka ensin voittaa n peliä. Yksittäisessä pelissä A voittaa todennäköisyydellä p ja B todennäköisyydellä q =
6. Differentiaaliyhtälösysteemien laadullista teoriaa.
 1 MAT-13450 LAAJA MATEMATIIKKA 5 Tampereen teknillinen yliopisto Risto Silvennoinen Kevät 2010 6. Differentiaaliyhtälösysteemien laadullista teoriaa. Olemme keskittyneet tässä kurssissa ensimmäisen kertaluvun
1 MAT-13450 LAAJA MATEMATIIKKA 5 Tampereen teknillinen yliopisto Risto Silvennoinen Kevät 2010 6. Differentiaaliyhtälösysteemien laadullista teoriaa. Olemme keskittyneet tässä kurssissa ensimmäisen kertaluvun
JAKSO 2 KANTA JA KOORDINAATIT
 JAKSO 2 KANTA JA KOORDINAATIT Kanta ja dimensio Tehtävä Esittele vektoriavaruuden kannan määritelmä vapauden ja virittämisen käsitteiden avulla ja anna vektoriavaruuden dimension määritelmä Esittele Lause
JAKSO 2 KANTA JA KOORDINAATIT Kanta ja dimensio Tehtävä Esittele vektoriavaruuden kannan määritelmä vapauden ja virittämisen käsitteiden avulla ja anna vektoriavaruuden dimension määritelmä Esittele Lause
Numeeriset menetelmät TIEA381. Luento 12. Kirsi Valjus. Jyväskylän yliopisto. Luento 12 () Numeeriset menetelmät / 33
 Numeeriset menetelmät / 33") Numeeriset menetelmät TIEA381 Luento 12 Kirsi Valjus Jyväskylän yliopisto Luento 12 () Numeeriset menetelmät 25.4.2013 1 / 33 Luennon 2 sisältö Tavallisten differentiaaliyhtälöiden numeriikasta Rungen
Numeeriset menetelmät TIEA381 Luento 12 Kirsi Valjus Jyväskylän yliopisto Luento 12 () Numeeriset menetelmät 25.4.2013 1 / 33 Luennon 2 sisältö Tavallisten differentiaaliyhtälöiden numeriikasta Rungen
Osakesalkun optimointi. Anni Halkola Turun yliopisto 2016
 Osakesalkun optimointi Anni Halkola Turun yliopisto 2016 Artikkeli Gleb Beliakov & Adil Bagirov (2006) Non-smooth optimization methods for computation of the Conditional Value-at-risk and portfolio optimization.
Osakesalkun optimointi Anni Halkola Turun yliopisto 2016 Artikkeli Gleb Beliakov & Adil Bagirov (2006) Non-smooth optimization methods for computation of the Conditional Value-at-risk and portfolio optimization.
Amazon.com: $130,00. Osia, jaetaan opetusmonisteissa
 1 Kurssin käytännön järjestelyt Luennot (12 kpl) tiistaisin klo 9 12 luokassa Y313 Luennoitsija TkT Mitri Kitti Vastaanotto luentojen yhteydessä email: mitri.kitti@hse.fi Luentomoniste kurssin verkkosivuilla
1 Kurssin käytännön järjestelyt Luennot (12 kpl) tiistaisin klo 9 12 luokassa Y313 Luennoitsija TkT Mitri Kitti Vastaanotto luentojen yhteydessä email: mitri.kitti@hse.fi Luentomoniste kurssin verkkosivuilla
Numeeriset menetelmät TIEA381. Luento 5. Kirsi Valjus. Jyväskylän yliopisto. Luento 5 () Numeeriset menetelmät / 28
 Numeeriset menetelmät / 28") Numeeriset menetelmät TIEA381 Luento 5 Kirsi Valjus Jyväskylän yliopisto Luento 5 () Numeeriset menetelmät 3.4.2013 1 / 28 Luennon 5 sisältö Luku 4: Ominaisarvotehtävistä Potenssiinkorotusmenetelmä QR-menetelmä
Numeeriset menetelmät TIEA381 Luento 5 Kirsi Valjus Jyväskylän yliopisto Luento 5 () Numeeriset menetelmät 3.4.2013 1 / 28 Luennon 5 sisältö Luku 4: Ominaisarvotehtävistä Potenssiinkorotusmenetelmä QR-menetelmä
Kimppu-suodatus-menetelmä
 Kimppu-suodatus-menetelmä 2. toukokuuta 2016 Kimppu-suodatus-menetelmä on kehitetty epäsileiden optimointitehtävien ratkaisemista varten. Menetelmässä approksimoidaan epäsileitä funktioita aligradienttikimpulla.
Kimppu-suodatus-menetelmä 2. toukokuuta 2016 Kimppu-suodatus-menetelmä on kehitetty epäsileiden optimointitehtävien ratkaisemista varten. Menetelmässä approksimoidaan epäsileitä funktioita aligradienttikimpulla.
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 4: Ketjusäännöt ja lineaarinen approksimointi
 Luento 4: Ketjusäännöt ja lineaarinen approksimointi") MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 4: Ketjusäännöt ja lineaarinen approksimointi Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0202 Syksy 2015 1
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 4: Ketjusäännöt ja lineaarinen approksimointi Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0202 Syksy 2015 1
[xk r k ] T Q[x k r k ] + u T k Ru k. }.
![[xk r k ] T Q[x k r k ] + u T k Ru k. }.](/thumbs/61/45563797.jpg "[xk r k ] T Q[x k r k ] + u T k Ru k. }.") Mat-2.48 Dynaaminen optimointi Mitri Kitti/Ilkka Leppänen Mallivastaukset, kierros 3. Johdetaan lineaarisen aikainvariantin seurantatehtävän yleinen ratkaisu neliöllisellä kustannuksella. Systeemi: x k+
Mat-2.48 Dynaaminen optimointi Mitri Kitti/Ilkka Leppänen Mallivastaukset, kierros 3. Johdetaan lineaarisen aikainvariantin seurantatehtävän yleinen ratkaisu neliöllisellä kustannuksella. Systeemi: x k+
ẋ(t) = s x (t) + f x y(t) u x x(t) ẏ(t) = s y (t) + f y x(t) u y y(t),
 = s x (t) + f x y(t) u x x(t) ẏ(t) = s y (t) + f y x(t) u y y(t),") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-2.4129 Systeemien Identifiointi 1. harjoituksen ratkaisut 1. Tarkastellaan maita X ja Y. Olkoon näiden varustelutaso
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-2.4129 Systeemien Identifiointi 1. harjoituksen ratkaisut 1. Tarkastellaan maita X ja Y. Olkoon näiden varustelutaso
MS-C1340 Lineaarialgebra ja
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Matriisinormi, häiriöalttius Riikka Kangaslampi Kevät 2017 Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Matriisinormi Matriisinormi Matriiseille
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Matriisinormi, häiriöalttius Riikka Kangaslampi Kevät 2017 Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Matriisinormi Matriisinormi Matriiseille
Ei välttämättä, se voi olla esimerkiksi Reuleaux n kolmio:
 Inversio-ongelmista Craig, Brown: Inverse problems in astronomy, Adam Hilger 1986. Havaitaan oppositiossa olevaa asteroidia. Pyörimisestä huolimatta sen kirkkaus ei muutu. Projisoitu pinta-ala pysyy ilmeisesti
Inversio-ongelmista Craig, Brown: Inverse problems in astronomy, Adam Hilger 1986. Havaitaan oppositiossa olevaa asteroidia. Pyörimisestä huolimatta sen kirkkaus ei muutu. Projisoitu pinta-ala pysyy ilmeisesti
Integrointialgoritmit molekyylidynamiikassa
 Integrointialgoritmit molekyylidynamiikassa Markus Ovaska 28.11.2008 Esitelmän kulku MD-simulaatiot yleisesti Integrointialgoritmit: mitä integroidaan ja miten? Esimerkkejä eri algoritmeista Hyvän algoritmin
Integrointialgoritmit molekyylidynamiikassa Markus Ovaska 28.11.2008 Esitelmän kulku MD-simulaatiot yleisesti Integrointialgoritmit: mitä integroidaan ja miten? Esimerkkejä eri algoritmeista Hyvän algoritmin
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio. Mat Systeemien Identifiointi. 4. harjoitus
 TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2.4129 Systeemien Identifiointi 4. harjoitus 1. a) Laske valkoisen kohinan spektraalitiheys. b) Tarkastellaan ARMA-prosessia C(q 1 )y = D(q 1 )e,
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2.4129 Systeemien Identifiointi 4. harjoitus 1. a) Laske valkoisen kohinan spektraalitiheys. b) Tarkastellaan ARMA-prosessia C(q 1 )y = D(q 1 )e,
ACKERMANNIN ALGORITMI. Olkoon järjestelmä. x(k+1) = Ax(k) + Bu(k)
 = Ax(k) + Bu(k)") ACKERMANNIN ALGORITMI Olkoon järjestelmä x(k+1) = Ax( + Bu( jossa x( = tilavektori (n x 1) u( = ohjaus (skalaari) A (n x n matriisi) B (n x 1 matriisi) Oletetaan, että ohjaus u( = Kx( on rajoittamaton.
ACKERMANNIN ALGORITMI Olkoon järjestelmä x(k+1) = Ax( + Bu( jossa x( = tilavektori (n x 1) u( = ohjaus (skalaari) A (n x n matriisi) B (n x 1 matriisi) Oletetaan, että ohjaus u( = Kx( on rajoittamaton.
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
Harjoitus 4: Matlab - Optimization Toolbox
 Harjoitus 4: Matlab - Optimization Toolbox Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Optimointimallin muodostaminen
Harjoitus 4: Matlab - Optimization Toolbox Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Optimointimallin muodostaminen
Mat Lineaarinen ohjelmointi
 Mat-2.3140 Lineaarinen ohjelmointi 4.10.2007 Luento 4 Ekstreemipisteiden optimaalisuus ja Simplex (kirja 2.4-2.6, 3.1-3.2) Lineaarinen ohjelmointi - Syksy 2007 / 1 Luentorunko Degeneroituvuus Ekstreemipisteiden
Mat-2.3140 Lineaarinen ohjelmointi 4.10.2007 Luento 4 Ekstreemipisteiden optimaalisuus ja Simplex (kirja 2.4-2.6, 3.1-3.2) Lineaarinen ohjelmointi - Syksy 2007 / 1 Luentorunko Degeneroituvuus Ekstreemipisteiden
Ensimmäisen ja toisen kertaluvun differentiaaliyhtälöistä
 1 MAT-1345 LAAJA MATEMATIIKKA 5 Tampereen teknillinen yliopisto Risto Silvennoinen Kevät 9 Ensimmäisen ja toisen kertaluvun differentiaaliyhtälöistä Yksi tavallisimmista luonnontieteissä ja tekniikassa
1 MAT-1345 LAAJA MATEMATIIKKA 5 Tampereen teknillinen yliopisto Risto Silvennoinen Kevät 9 Ensimmäisen ja toisen kertaluvun differentiaaliyhtälöistä Yksi tavallisimmista luonnontieteissä ja tekniikassa
Mat Työ 1: Optimaalinen lento riippuliitimellä
 Mat-2.132 Työ 1: Optimaalinen lento riippuliitimellä Miten ohjaan liidintä, jotta lentäisin mahdollisimman pitkälle?? 1 työssä Konstruoidaan riippuliitimen malli dynaamisen systeemin tilaesitys Simuloidaan
Mat-2.132 Työ 1: Optimaalinen lento riippuliitimellä Miten ohjaan liidintä, jotta lentäisin mahdollisimman pitkälle?? 1 työssä Konstruoidaan riippuliitimen malli dynaamisen systeemin tilaesitys Simuloidaan
Yleistä. Aalto-yliopisto Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos
 Aalto-yliopisto Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos MS-E2129 Systeemien identifiointi 3. Harjoitustyö Heiluri-vaunusysteemin parametrien estimointi Yleistä Systeemianalyysin
Aalto-yliopisto Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos MS-E2129 Systeemien identifiointi 3. Harjoitustyö Heiluri-vaunusysteemin parametrien estimointi Yleistä Systeemianalyysin
Matriisi-vektori-kertolasku, lineaariset yhtälöryhmät
 Matematiikan peruskurssi K3/P3, syksy 25 Kenrick Bingham 825 Toisen välikokeen alueen ydinasioita Alla on lueteltu joitakin koealueen ydinkäsitteitä, joiden on hyvä olla ensiksi selvillä kokeeseen valmistauduttaessa
Matematiikan peruskurssi K3/P3, syksy 25 Kenrick Bingham 825 Toisen välikokeen alueen ydinasioita Alla on lueteltu joitakin koealueen ydinkäsitteitä, joiden on hyvä olla ensiksi selvillä kokeeseen valmistauduttaessa
8. kierros. 1. Lähipäivä
 8. kierros 1. Lähipäivä Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia Tavoitteet: tietää Saavutettavuus
8. kierros 1. Lähipäivä Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia Tavoitteet: tietää Saavutettavuus
Luento 5: Suurten lineaaristen yhtälöryhmien ratkaiseminen iteratiivisilla menetelmillä
 Luento 5: Suurten lineaaristen yhtälöryhmien ratkaiseminen iteratiivisilla menetelmillä Matriisit voivat olla kooltaan niin suuria, että LU-hajotelman laskeminen ei ole järkevä tapa ratkaista lineaarista
Luento 5: Suurten lineaaristen yhtälöryhmien ratkaiseminen iteratiivisilla menetelmillä Matriisit voivat olla kooltaan niin suuria, että LU-hajotelman laskeminen ei ole järkevä tapa ratkaista lineaarista
PID-sa a timen viritta minen Matlabilla ja simulinkilla
 PID-sa a timen viritta minen Matlabilla ja simulinkilla Kriittisen värähtelyn menetelmä Tehtiin kuvan 1 mukainen tasavirtamoottorin piiri PID-säätimellä. Virittämistä varten PID-säätimen ja asetettiin
PID-sa a timen viritta minen Matlabilla ja simulinkilla Kriittisen värähtelyn menetelmä Tehtiin kuvan 1 mukainen tasavirtamoottorin piiri PID-säätimellä. Virittämistä varten PID-säätimen ja asetettiin
3 Lineaariset yhtälöryhmät ja Gaussin eliminointimenetelmä
 3 Lineaariset yhtälöryhmät ja Gaussin eliminointimenetelmä Lineaarinen m:n yhtälön yhtälöryhmä, jossa on n tuntematonta x 1,, x n on joukko yhtälöitä, jotka ovat muotoa a 11 x 1 + + a 1n x n = b 1 a 21
3 Lineaariset yhtälöryhmät ja Gaussin eliminointimenetelmä Lineaarinen m:n yhtälön yhtälöryhmä, jossa on n tuntematonta x 1,, x n on joukko yhtälöitä, jotka ovat muotoa a 11 x 1 + + a 1n x n = b 1 a 21
MS-A0207 Differentiaali- ja integraalilaskenta 2 (Chem) Yhteenveto, osa I
 Yhteenveto, osa I") MS-A0207 Differentiaali- ja integraalilaskenta 2 (Chem) Yhteenveto, osa I G. Gripenberg Aalto-yliopisto 21. tammikuuta 2016 G. Gripenberg (Aalto-yliopisto) MS-A0207 Differentiaali- ja integraalilaskenta
MS-A0207 Differentiaali- ja integraalilaskenta 2 (Chem) Yhteenveto, osa I G. Gripenberg Aalto-yliopisto 21. tammikuuta 2016 G. Gripenberg (Aalto-yliopisto) MS-A0207 Differentiaali- ja integraalilaskenta
Mat Dynaaminen optimointi, mallivastaukset, kierros Johdetaan ensiksi välttämättömät ehdot diskreettiaikaiselle optimisäätötehtävälle.
 Mat-2.148 Dynaaminen optimointi, mallivastaukset, kierros 9 1. Johdetaan ensiksi välttämättömät ehdot diskreettiaikaiselle optimisäätötehtävälle. Tilayhtälö on x k+1 = f k (x k, u k ), k = 1,..., N 1 alkuehdolla
Mat-2.148 Dynaaminen optimointi, mallivastaukset, kierros 9 1. Johdetaan ensiksi välttämättömät ehdot diskreettiaikaiselle optimisäätötehtävälle. Tilayhtälö on x k+1 = f k (x k, u k ), k = 1,..., N 1 alkuehdolla
8. kierros. 2. Lähipäivä
 8. kierros 2. Lähipäivä Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia Tavoitteet: tietää Saavutettavuus
8. kierros 2. Lähipäivä Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia Tavoitteet: tietää Saavutettavuus
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Differentiaaliyhtälöt, osa 1 Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 20 R. Kangaslampi Matriisihajotelmista
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Differentiaaliyhtälöt, osa 1 Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 20 R. Kangaslampi Matriisihajotelmista
Mat Systeemien identifiointi, aihepiirit 1/4
 , aihepiirit 1/4 Dynaamisten systeemien matemaattinen mallintaminen ja analyysi Matlab (System Identification Toolbox), Simulink 1. Matemaattinen mallintaminen: Mallintamisen ja mallin määritelmät Fysikaalinen
, aihepiirit 1/4 Dynaamisten systeemien matemaattinen mallintaminen ja analyysi Matlab (System Identification Toolbox), Simulink 1. Matemaattinen mallintaminen: Mallintamisen ja mallin määritelmät Fysikaalinen
Tehtävä 4.7 Tarkastellaan hiukkasta, joka on pakotettu liikkumaan toruksen pinnalla.
 Tehtävä.7 Tarkastellaan hiukkasta, joka on pakotettu liikkumaan toruksen pinnalla. x = (a + b cos(θ)) cos(ψ) y = (a + b cos(θ)) sin(ψ) = b sin(θ), a > b, θ π, ψ π Figure. Toruksen hajoituskuva Oletetaan,
Tehtävä.7 Tarkastellaan hiukkasta, joka on pakotettu liikkumaan toruksen pinnalla. x = (a + b cos(θ)) cos(ψ) y = (a + b cos(θ)) sin(ψ) = b sin(θ), a > b, θ π, ψ π Figure. Toruksen hajoituskuva Oletetaan,
SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS),
,") SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS), 5.2.2019 Tentin arvosteluperusteita: o Kurssin alku on osin kertausta SäAn ja prosessidynamiikkakursseista, jotka oletetaan
SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS), 5.2.2019 Tentin arvosteluperusteita: o Kurssin alku on osin kertausta SäAn ja prosessidynamiikkakursseista, jotka oletetaan
Mat Lineaarinen ohjelmointi
 Mat-2.34 Lineaarinen ohjelmointi..27 Luento 5 Simplexin implementaatioita (kirja 3.2-3.5) Lineaarinen ohjelmointi - Syksy 27 / Luentorunko (/2) Simplexin implementaatiot Naiivi Revised Full tableau Syklisyys
Mat-2.34 Lineaarinen ohjelmointi..27 Luento 5 Simplexin implementaatioita (kirja 3.2-3.5) Lineaarinen ohjelmointi - Syksy 27 / Luentorunko (/2) Simplexin implementaatiot Naiivi Revised Full tableau Syklisyys
Johdatus tekoälyn taustalla olevaan matematiikkaan
 Johdatus tekoälyn taustalla olevaan matematiikkaan Informaatioteknologian tiedekunta Jyväskylän yliopisto 4. luento 24.11.2017 Neuroverkon opettaminen - gradienttimenetelmä Neuroverkkoa opetetaan syöte-tavoite-pareilla
Johdatus tekoälyn taustalla olevaan matematiikkaan Informaatioteknologian tiedekunta Jyväskylän yliopisto 4. luento 24.11.2017 Neuroverkon opettaminen - gradienttimenetelmä Neuroverkkoa opetetaan syöte-tavoite-pareilla
Mat Dynaaminen optimointi, mallivastaukset, kierros Johdetaan välttämättömät ehdot funktionaalin. g(y(t), ẏ(t),...
, ẏ(t),...") Mat-2.148 Dynaaminen optimointi, mallivastaukset, kierros 6 1. Johdetaan välttämättömät ehdot funktionaalin J(y) = g(y(t), ẏ(t),..., dr y(t), t) dt dt r ekstremaalille, kun ja t f ovat kiinteitä ja tiedetään
Mat-2.148 Dynaaminen optimointi, mallivastaukset, kierros 6 1. Johdetaan välttämättömät ehdot funktionaalin J(y) = g(y(t), ẏ(t),..., dr y(t), t) dt dt r ekstremaalille, kun ja t f ovat kiinteitä ja tiedetään
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.
 Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
Lisämateriaalia: tilayhtälön ratkaisu, linearisointi. Matriisimuuttujan eksponenttifunktio:
 Lisämateriaalia: tilayhtälön ratkaisu, linearisinti Matriisimuuttujan ekspnenttifunkti: Kun A n neliömatriisi, niin määritellään 1 1 1 e I ta t A t A t A 2 6 i! At 2 2 3 3 i i jnka vidaan tdistaa knvergivan
Lisämateriaalia: tilayhtälön ratkaisu, linearisinti Matriisimuuttujan ekspnenttifunkti: Kun A n neliömatriisi, niin määritellään 1 1 1 e I ta t A t A t A 2 6 i! At 2 2 3 3 i i jnka vidaan tdistaa knvergivan
Dynaamiset regressiomallit
 MS-C2128 Ennustaminen ja Aikasarja-analyysi, Lauri Viitasaari Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2016 Tilastolliset aikasarjat voidaan jakaa kahteen
MS-C2128 Ennustaminen ja Aikasarja-analyysi, Lauri Viitasaari Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2016 Tilastolliset aikasarjat voidaan jakaa kahteen
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Systeemitekniikan laboratorio Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Systeemitekniikan laboratorio Jan 2019
Missä mennään. systeemi. identifiointi. mallikandidaatti. validointi. malli. (fysikaalinen) mallintaminen. mallin mallin käyttötarkoitus, reunaehdot
 mallintaminen. mallin mallin käyttötarkoitus, reunaehdot") Missä mennään systeemi mallin mallin käyttötarkoitus, reunaehdot käyttö- (fysikaalinen) mallintaminen luonnonlait yms. yms. identifiointi kokeita kokeita + päättely päättely vertailu mallikandidaatti validointi
Missä mennään systeemi mallin mallin käyttötarkoitus, reunaehdot käyttö- (fysikaalinen) mallintaminen luonnonlait yms. yms. identifiointi kokeita kokeita + päättely päättely vertailu mallikandidaatti validointi
Yhtälöryhmät 1/6 Sisältö ESITIEDOT: yhtälöt
 Yhtälöryhmät 1/6 Sisältö Yhtälöryhmä Yhtälöryhmässä on useita yhtälöitä ja yleensä myös useita tuntemattomia. Tavoitteena on löytää tuntemattomille sellaiset arvot, että kaikki yhtälöt toteutuvat samanaikaisesti.
Yhtälöryhmät 1/6 Sisältö Yhtälöryhmä Yhtälöryhmässä on useita yhtälöitä ja yleensä myös useita tuntemattomia. Tavoitteena on löytää tuntemattomille sellaiset arvot, että kaikki yhtälöt toteutuvat samanaikaisesti.
Yhtälöryhmä matriisimuodossa. MS-A0004/A0006 Matriisilaskenta. Tarkastellaan esimerkkinä lineaarista yhtälöparia. 2x1 x 2 = 1 x 1 + x 2 = 5.
 2. MS-A4/A6 Matriisilaskenta 2. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 5.9.25 Tarkastellaan esimerkkinä lineaarista yhtälöparia { 2x x 2 = x + x 2
2. MS-A4/A6 Matriisilaskenta 2. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 5.9.25 Tarkastellaan esimerkkinä lineaarista yhtälöparia { 2x x 2 = x + x 2
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 6 1 Korkolaskentaa Oletetaan, että korkoaste on r Jos esimerkiksi r = 0, 02, niin korko on 2 prosenttia Tätä korkoastetta käytettään diskonttaamaan tulevia tuloja ja
Matematiikan tukikurssi Kurssikerta 6 1 Korkolaskentaa Oletetaan, että korkoaste on r Jos esimerkiksi r = 0, 02, niin korko on 2 prosenttia Tätä korkoastetta käytettään diskonttaamaan tulevia tuloja ja
Johdatus tekoälyn taustalla olevaan matematiikkaan
 Johdatus tekoälyn taustalla olevaan matematiikkaan Informaatioteknologian tiedekunta Jyväskylän yliopisto 3. luento 17.11.2017 Neuroverkon opettaminen (ohjattu oppiminen) Neuroverkkoa opetetaan syöte-tavoite-pareilla
Johdatus tekoälyn taustalla olevaan matematiikkaan Informaatioteknologian tiedekunta Jyväskylän yliopisto 3. luento 17.11.2017 Neuroverkon opettaminen (ohjattu oppiminen) Neuroverkkoa opetetaan syöte-tavoite-pareilla
Mat Dynaaminen optimointi, mallivastaukset, kierros 3
 Mat-2.48 Dynaaminen optimointi, mallivastaukset, kierros 3. Johdetaan lineaarisen aikainvariantin seurantatehtävän yleinen ratkaisu neliöllisellä kustannuksella. Systeemi: Kustannusfunktio: J = 2 xt NHx
Mat-2.48 Dynaaminen optimointi, mallivastaukset, kierros 3. Johdetaan lineaarisen aikainvariantin seurantatehtävän yleinen ratkaisu neliöllisellä kustannuksella. Systeemi: Kustannusfunktio: J = 2 xt NHx
Mat Dynaaminen optimointi, mallivastaukset, kierros Vaimennetun heilurin tilanyhtälöt on esitetty luennolla: θ = g sin θ r θ
 Mat-48 Dynaaminen optimointi, mallivastaukset, kierros Vaimennetun heilurin tilanyhtälöt on esitetty luennolla: θ = g sin θ r θ L ẋ = x ẋ = g L sin x rx Epälineaarisen systeemin tasapainotiloja voidaan
Mat-48 Dynaaminen optimointi, mallivastaukset, kierros Vaimennetun heilurin tilanyhtälöt on esitetty luennolla: θ = g sin θ r θ L ẋ = x ẋ = g L sin x rx Epälineaarisen systeemin tasapainotiloja voidaan
Antti Rasila. Kevät Matematiikan ja systeemianalyysin laitos Aalto-yliopisto. Antti Rasila (Aalto-yliopisto) MS-A0204 Kevät / 16
 MS-A0204 Kevät / 16") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio. Antti Rasila Matematiikan ja systeemianalyysin laitos
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio. Antti Rasila Matematiikan ja systeemianalyysin laitos
Ominaisarvo-hajoitelma ja diagonalisointi
 Ominaisarvo-hajoitelma ja a 1 Lause 1: Jos reaalisella n n matriisilla A on n eri suurta reaalista ominaisarvoa λ 1,λ 2,...,λ n, λ i λ j, kun i j, niin vastaavat ominaisvektorit x 1, x 2,..., x n muodostavat
Ominaisarvo-hajoitelma ja a 1 Lause 1: Jos reaalisella n n matriisilla A on n eri suurta reaalista ominaisarvoa λ 1,λ 2,...,λ n, λ i λ j, kun i j, niin vastaavat ominaisvektorit x 1, x 2,..., x n muodostavat
Dynaamisten systeemien identifiointi 1/2
 Dynaamisten systeemien identifiointi 1/2 Mallin rakentaminen mittausten avulla Epäparametriset menetelmät: tuloksena malli, joka ei perustu parametreille impulssi-, askel- tai taajusvaste siirtofunktion
Dynaamisten systeemien identifiointi 1/2 Mallin rakentaminen mittausten avulla Epäparametriset menetelmät: tuloksena malli, joka ei perustu parametreille impulssi-, askel- tai taajusvaste siirtofunktion
MS-A0004/MS-A0006 Matriisilaskenta Laskuharjoitus 6 / vko 42
 MS-A0004/MS-A0006 Matriisilaskenta Laskuharjoitus 6 / vko 42 Tehtävät 1-4 lasketaan alkuviikon harjoituksissa ryhmissä, ja ryhmien ratkaisut esitetään harjoitustilaisuudessa (merkitty kirjaimella L = Lasketaan).
MS-A0004/MS-A0006 Matriisilaskenta Laskuharjoitus 6 / vko 42 Tehtävät 1-4 lasketaan alkuviikon harjoituksissa ryhmissä, ja ryhmien ratkaisut esitetään harjoitustilaisuudessa (merkitty kirjaimella L = Lasketaan).
Numeeriset menetelmät
 Numeeriset menetelmät Luento 3 Ti 13.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 3 Ti 13.9.2011 p. 1/37 p. 1/37 Epälineaariset yhtälöt Newtonin menetelmä: x n+1 = x n f(x n) f (x n ) Sekanttimenetelmä:
Numeeriset menetelmät Luento 3 Ti 13.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 3 Ti 13.9.2011 p. 1/37 p. 1/37 Epälineaariset yhtälöt Newtonin menetelmä: x n+1 = x n f(x n) f (x n ) Sekanttimenetelmä:
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 8 1 Suunnattu derivaatta Aluksi tarkastelemme vektoreita, koska ymmärrys vektoreista helpottaa alla olevien asioiden omaksumista. Kun liikutaan tasossa eli avaruudessa
Matematiikan tukikurssi Kurssikerta 8 1 Suunnattu derivaatta Aluksi tarkastelemme vektoreita, koska ymmärrys vektoreista helpottaa alla olevien asioiden omaksumista. Kun liikutaan tasossa eli avaruudessa
Numeeriset menetelmät
 Numeeriset menetelmät Luento 5 Ti 20.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 5 Ti 20.9.2011 p. 1/40 p. 1/40 Choleskyn menetelmä Positiivisesti definiiteillä matriiseilla kolmiohajotelma
Numeeriset menetelmät Luento 5 Ti 20.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 5 Ti 20.9.2011 p. 1/40 p. 1/40 Choleskyn menetelmä Positiivisesti definiiteillä matriiseilla kolmiohajotelma
3 Lineaariset yhtälöryhmät ja Gaussin eliminointimenetelmä
 1 3 Lineaariset yhtälöryhmät ja Gaussin eliminointimenetelmä Lineaarinen m:n yhtälön yhtälöryhmä, jossa on n tuntematonta x 1,, x n on joukko yhtälöitä, jotka ovat muotoa a 11 x 1 + + a 1n x n = b 1 a
1 3 Lineaariset yhtälöryhmät ja Gaussin eliminointimenetelmä Lineaarinen m:n yhtälön yhtälöryhmä, jossa on n tuntematonta x 1,, x n on joukko yhtälöitä, jotka ovat muotoa a 11 x 1 + + a 1n x n = b 1 a
1 Rajoittamaton optimointi
 Taloustieteen matemaattiset menetelmät 7 materiaali 5 Rajoittamaton optimointi Yhden muuttujan tapaus f R! R Muistutetaan mieleen maksimin määritelmä. Funktiolla f on maksimi pisteessä x jos kaikille y
Taloustieteen matemaattiset menetelmät 7 materiaali 5 Rajoittamaton optimointi Yhden muuttujan tapaus f R! R Muistutetaan mieleen maksimin määritelmä. Funktiolla f on maksimi pisteessä x jos kaikille y
Malliratkaisut Demot
 Malliratkaisut Demot 1 23.1.2017 1. Päätösmuuttujiksi voidaan valita x 1 : tehtyjen peruspöytin lukumäärä x 2 : tehtyjen luxuspöytien lukumäärä. Optimointitehtäväksi tulee max 200x 1 + 350x 2 s. t. 5x
Malliratkaisut Demot 1 23.1.2017 1. Päätösmuuttujiksi voidaan valita x 1 : tehtyjen peruspöytin lukumäärä x 2 : tehtyjen luxuspöytien lukumäärä. Optimointitehtäväksi tulee max 200x 1 + 350x 2 s. t. 5x
12. Hessen matriisi. Ääriarvoteoriaa
 179 12. Hessen matriisi. Ääriarvoteoriaa Tarkastelemme tässä luvussa useamman muuttujan (eli vektorimuuttujan) n reaaliarvoisia unktioita : R R. Edellisessä luvussa todettiin, että riittävän säännöllisellä
179 12. Hessen matriisi. Ääriarvoteoriaa Tarkastelemme tässä luvussa useamman muuttujan (eli vektorimuuttujan) n reaaliarvoisia unktioita : R R. Edellisessä luvussa todettiin, että riittävän säännöllisellä
, on säännöllinen 2-ulotteinen pinta. Määrää T x0 pisteessä x 0 = (0, 1, 1).
.") HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi II, syksy 017 Harjoitus 4 Ratkaisuehdotukset 4.1. Osoita, että tasa-arvojoukko S F (0), F : R 3 R, F (x) = 3x 1 x 3 + e x + x e x 3, on säännöllinen
HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi II, syksy 017 Harjoitus 4 Ratkaisuehdotukset 4.1. Osoita, että tasa-arvojoukko S F (0), F : R 3 R, F (x) = 3x 1 x 3 + e x + x e x 3, on säännöllinen
Solmu 3/2001 Solmu 3/2001. Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä:
 Frégier n lause Simo K. Kivelä Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä: Suorakulmaisen kolmion kaikki kärjet sijaitsevat paraabelilla y = x 2 ; suoran kulman
Frégier n lause Simo K. Kivelä Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä: Suorakulmaisen kolmion kaikki kärjet sijaitsevat paraabelilla y = x 2 ; suoran kulman
Säätötekniikan matematiikan verkkokurssi, Matlab tehtäviä ja vastauksia 29.7.2002
 Matlab tehtäviä 1. Muodosta seuraavasta differentiaaliyhtälöstä siirtofuntio. Tämä differentiaaliyhtälö saattaisi kuvata esimerkiksi yksinkertaista vaimennettua jousi-massa systeemiä, johon on liitetty
Matlab tehtäviä 1. Muodosta seuraavasta differentiaaliyhtälöstä siirtofuntio. Tämä differentiaaliyhtälö saattaisi kuvata esimerkiksi yksinkertaista vaimennettua jousi-massa systeemiä, johon on liitetty
k = 1,...,r. L(x 1 (t), x
, x") Mat-2.148 Dynaaminen optimointi Mitri Kitti/Ilkka Leppänen Mallivastaukset, kierros 6 1. Johdetaan välttämättömät ehdot funktionaalin J(y) = t g(y(t), ẏ(t),..., dr y(t), t) dt dt r ekstremaalille, kun
Mat-2.148 Dynaaminen optimointi Mitri Kitti/Ilkka Leppänen Mallivastaukset, kierros 6 1. Johdetaan välttämättömät ehdot funktionaalin J(y) = t g(y(t), ẏ(t),..., dr y(t), t) dt dt r ekstremaalille, kun
MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat.
 MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 2016 1 Perustuu
MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 2016 1 Perustuu
1 Komparatiivinen statiikka ja implisiittifunktiolause
 Taloustieteen matemaattiset menetelmät 27 materiaali 4 Komparatiivinen statiikka ja implisiittifunktiolause. Johdanto Jo opiskeltu antaa nyt valmiu tutkia taloudellisia malleja Kiinnostava malli voi olla
Taloustieteen matemaattiset menetelmät 27 materiaali 4 Komparatiivinen statiikka ja implisiittifunktiolause. Johdanto Jo opiskeltu antaa nyt valmiu tutkia taloudellisia malleja Kiinnostava malli voi olla
8 KANNAT JA ORTOGONAALISUUS. 8.1 Lineaarinen riippumattomuus. Vaasan yliopiston julkaisuja 151
 Vaasan yliopiston julkaisuja 151 8 KANNAT JA ORTOGONAALISUUS KantaOrthogon Sec:LinIndep 8.1 Lineaarinen riippumattomuus Lineaarinen riippumattomuus on oikeastaan jo määritelty, mutta kirjoitamme määritelmät
Vaasan yliopiston julkaisuja 151 8 KANNAT JA ORTOGONAALISUUS KantaOrthogon Sec:LinIndep 8.1 Lineaarinen riippumattomuus Lineaarinen riippumattomuus on oikeastaan jo määritelty, mutta kirjoitamme määritelmät
MS-A0003/A0005 Matriisilaskenta Malliratkaisut 5 / vko 48
 MS-A3/A5 Matriisilaskenta Malliratkaisut 5 / vko 48 Tehtävä (L): a) Onko 4 3 sitä vastaava ominaisarvo? b) Onko λ = 3 matriisin matriisin 2 2 3 2 3 7 9 4 5 2 4 4 ominaisvektori? Jos on, mikä on ominaisarvo?
MS-A3/A5 Matriisilaskenta Malliratkaisut 5 / vko 48 Tehtävä (L): a) Onko 4 3 sitä vastaava ominaisarvo? b) Onko λ = 3 matriisin matriisin 2 2 3 2 3 7 9 4 5 2 4 4 ominaisvektori? Jos on, mikä on ominaisarvo?
Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C (s+1)(s+0.02) 50s+1
 Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C (s+1)(s+0.02) 50s+1") ENSO IKONEN PYOSYS Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C. 1 P(s) = -----------------(s+1)(s+0.02) C(s) = 50s+1 --------50s Piirrä vasteet asetusarvosta. Kommentoi
ENSO IKONEN PYOSYS Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C. 1 P(s) = -----------------(s+1)(s+0.02) C(s) = 50s+1 --------50s Piirrä vasteet asetusarvosta. Kommentoi
Säätötekniikan alkeita
 Säätötekniikan alkeita Säätötekniikan avulla pyritään ohjaamaan erilaisia i i järjestelmiäj älyä sisältävällä menetelmällä. Tavoitteena on saada systeemi käyttäytymään halutulla tavalla luotettavasti,
Säätötekniikan alkeita Säätötekniikan avulla pyritään ohjaamaan erilaisia i i järjestelmiäj älyä sisältävällä menetelmällä. Tavoitteena on saada systeemi käyttäytymään halutulla tavalla luotettavasti,
Johdatus tekoälyn taustalla olevaan matematiikkaan
 Johdatus tekoälyn taustalla olevaan matematiikkaan Informaatioteknologian tiedekunta Jyväskylän yliopisto 5. luento.2.27 Lineaarialgebraa - Miksi? Neuroverkon parametreihin liittyvät kaavat annetaan monesti
Johdatus tekoälyn taustalla olevaan matematiikkaan Informaatioteknologian tiedekunta Jyväskylän yliopisto 5. luento.2.27 Lineaarialgebraa - Miksi? Neuroverkon parametreihin liittyvät kaavat annetaan monesti
Aikatason vaste vs. siirtofunktio Tehtävä
 Aikatason vaste vs. siirtofunktio Tehtävä Millainen toisen kertaluvun siirtofunktio vastaa systeemiä jonka ylitys on 10% ja asettumisaika 4 min? Y s X s = 2 n s 2 2 2 n s n M p =e t r 1.8 n t s 4.6 n 1
Aikatason vaste vs. siirtofunktio Tehtävä Millainen toisen kertaluvun siirtofunktio vastaa systeemiä jonka ylitys on 10% ja asettumisaika 4 min? Y s X s = 2 n s 2 2 2 n s n M p =e t r 1.8 n t s 4.6 n 1
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat.
 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat.") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016 Antti Rasila
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016 Antti Rasila
12 Jatkuva-aikaisten tehtävien numeerinen ratkaiseminen
 12 Jatkuva-aikaisten tehtävien numeerinen ratkaiseminen Ratkaisumenetelmät jaetaan epäsuoriin ja suoriin menetelmiin Epäsuora menetelmä yrittää ratkaista Pontryaginin minimiperiaatteen mukaiset vättlämättömät
12 Jatkuva-aikaisten tehtävien numeerinen ratkaiseminen Ratkaisumenetelmät jaetaan epäsuoriin ja suoriin menetelmiin Epäsuora menetelmä yrittää ratkaista Pontryaginin minimiperiaatteen mukaiset vättlämättömät
MS-A0207 Differentiaali- ja integraalilaskenta 2 Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio.
 MS-A0207 Differentiaali- ja integraalilaskenta 2 Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio. Riikka Korte Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto
MS-A0207 Differentiaali- ja integraalilaskenta 2 Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio. Riikka Korte Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys10 Kevät 010 Jukka Maalampi LUENTO 7 Harmonisen värähdysliikkeen energia Jousen potentiaalienergia on U k( x ) missä k on jousivakio ja Dx on poikkeama tasapainosta. Valitaan
Mekaniikan jatkokurssi Fys10 Kevät 010 Jukka Maalampi LUENTO 7 Harmonisen värähdysliikkeen energia Jousen potentiaalienergia on U k( x ) missä k on jousivakio ja Dx on poikkeama tasapainosta. Valitaan
2. Teoriaharjoitukset
 2. Teoriaharjoitukset Demotehtävät 2.1 Todista Gauss-Markovin lause. Ratkaisu. Oletetaan että luentokalvojen standardioletukset (i)-(v) ovat voimassa. Huomaa että Gauss-Markovin lause ei vaadi virhetermien
2. Teoriaharjoitukset Demotehtävät 2.1 Todista Gauss-Markovin lause. Ratkaisu. Oletetaan että luentokalvojen standardioletukset (i)-(v) ovat voimassa. Huomaa että Gauss-Markovin lause ei vaadi virhetermien
Algoritmit 2. Luento 13 Ti Timo Männikkö
 Algoritmit 2 Luento 13 Ti 30.4.2019 Timo Männikkö Luento 13 Simuloitu jäähdytys Merkkijonon sovitus Horspoolin algoritmi Ositus ja rekursio Rekursion toteutus Algoritmit 2 Kevät 2019 Luento 13 Ti 30.4.2019
Algoritmit 2 Luento 13 Ti 30.4.2019 Timo Männikkö Luento 13 Simuloitu jäähdytys Merkkijonon sovitus Horspoolin algoritmi Ositus ja rekursio Rekursion toteutus Algoritmit 2 Kevät 2019 Luento 13 Ti 30.4.2019
min x x2 2 x 1 + x 2 1 = 0 (1) 2x1 1, h = f = 4x 2 2x1 + v = 0 4x 2 + v = 0 min x x3 2 x1 = ± v/3 = ±a x 2 = ± v/3 = ±a, a > 0 0 6x 2
 2x1 1, h = f = 4x 2 2x1 + v = 0 4x 2 + v = 0 min x x3 2 x1 = ± v/3 = ±a x 2 = ± v/3 = ±a, a > 0 0 6x 2") TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-39 Optimointioppi Kimmo Berg 6 harjoitus - ratkaisut min x + x x + x = () x f = 4x, h = x 4x + v = { { x + v = 4x + v = x = v/ x = v/4 () v/ v/4
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-39 Optimointioppi Kimmo Berg 6 harjoitus - ratkaisut min x + x x + x = () x f = 4x, h = x 4x + v = { { x + v = 4x + v = x = v/ x = v/4 () v/ v/4
Inversio-ongelmien laskennallinen peruskurssi Luento 2
 Inversio-ongelmien laskennallinen peruskurssi Luento 2 Kevät 2012 1 Lineaarinen inversio-ongelma Määritelmä 1.1. Yleinen (reaaliarvoinen) lineaarinen inversio-ongelma voidaan esittää muodossa m = Ax +
Inversio-ongelmien laskennallinen peruskurssi Luento 2 Kevät 2012 1 Lineaarinen inversio-ongelma Määritelmä 1.1. Yleinen (reaaliarvoinen) lineaarinen inversio-ongelma voidaan esittää muodossa m = Ax +
LIITE 1 VIRHEEN ARVIOINNISTA
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
MS-A0004/A0006 Matriisilaskenta
 4. MS-A4/A6 Matriisilaskenta 4. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto..25 Tarkastellaan neliömatriiseja. Kun matriisilla kerrotaan vektoria, vektorin
4. MS-A4/A6 Matriisilaskenta 4. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto..25 Tarkastellaan neliömatriiseja. Kun matriisilla kerrotaan vektoria, vektorin