Luento 3: Digitaalinen kuvatuotanto II. Yleistä. CCD-rivi-ilmaisimiin perustuvat kamerat. Maa Fotogrammetrinen kartoitus
|
|
|
- Maija-Liisa Salminen
- 7 vuotta sitten
- Katselukertoja:
Transkriptio
1 Maa Fotogrammetrinen kartoitus Luento-ohjelma Luento 3: Digitaalinen kuvatuotanto II Luento 3: Digitaalinen kuvatuotanto II Yleistä CCD-rivi-ilmaisimiin perustuvat kamerat MOMS-02 ADS40 CCD-matriiseihin perustuvat kamerat Z/I DMC Vexcel Ultracam Emerge DSS Rivi- ja matriisikameroiden vertailua Digitaali- ja analogiailmakuvauksen eroista Kirjallisuutta Yleistä (Alkuperäinen luento: Henrik Haggrén, Muutoksia: Eija Honkavaara ) Suuriresoluutioiselle digitaaliselle sensorille asetettavia vaatimuksia ovat o laaja kuvakulma, o hyvä radiometrinen erotuskyky ja tarkkuus, o hyvä geometrinen erotuskyky ja tarkkuus, o samanaikaiset multi-spektraaliset kuvat sekä o stereo. Sellaisia digitaalisia kameroita, joilla voitaisiin yhdellä "kuvanotolla" tuottaa kartoitusilmakuvan kokoisia kuvia, ei ole. Suurimmat kuva-anturit ovat digitaalisilla kameroilla luokkaa x pikseliä. Digitaalinen kartoituskuvaus onkin periaatteessa sama asia kuin skannaaminen filmiltä, mutta skannaaminen tehdään suoraan kohteelta. Kummassakin tapauksessa kohdetta pyyhkitään joko pistemäisellä ilmaisimella, riviilmaisimella, tai kaksiulotteisella kuva-anturilla. Kohteella skannattu ja digitoitu kuva ei kuitenkaan koskaan vastaa geometrialtaan vastaavaa filmiltä skannattua kuvaa. o Koska kuvausalusta, satelliitti tai lentokone, liikkuu "yhden kuvan" kuvanoton aikana, kuva ei ole kuin osittain keskusprojektiokuva. o Kuvausalustan epävakaa liike aiheuttaa kuvan sisäiseen geometriaan epäsäännöllisyyttä, jota ei voi kalibroida. Sen mallintaminenkin on sitä vaikeamapaa mitä pienemmissä osissa kuva skannataan. Riittävän laaja kuva-ala saadaan siis yhdistämällä pienempiä sensoreita. Käytössä olevat digitaaliset ilmakuvakamerat perustuvat joko CCD-rivi-antureihin (pushbroom geometria) tai pieniin CCD-matriiseihin. Tällä hetkellä markkinoilla olevia suuriformaattisia ilmakuvakameroita ovat: o Leica Geosystems ADS40 o Vexcel Ultracam o Z/I Imaging DMC: Esimerkki keskiformaattisesta digitaalisesta kamerasta on Emerge:n DSS (Digital Sensor System) CCD-rivi-ilmaisimiin perustuvat kamerat Manufacturer Model Photopixel Pxelsize [µm] Atmel TH k 6.5x6.5 1

2 Atmel customize 2x12k 6.5x6.5 EEV CCD k 8x8 KODAK KLI x10k 7x7 KODAK KLI x14k 5x5 Fairchild Imaging CCD194 12k 10x8.5 SONY ILX734K 3x10k 8x8 Film-based and Digital Sensors Augmentation or Change in Paradigm? Photogrammetric Week 2003, pp Pushbroom scanner. Satelliittikuvausjärjestelmät toimivat yleisesti rivi-ilmaisimista rakennetuilla keilaimilla. Niillä saadaan hyvä erotuskyky keilaussuuntaan nähden kohtisuorassa suunnassa. Rivikeilaimen tallentama "kuva" on sisäisesti vakaa keskusprojektiokuva lentosuuntaa vasten kohtisuorassa suunnassa; lentosuunnassa kuvan eheys riippuu kuvausalustan liikkeistä. Lentoalustan liikkeet tulee korjata jokaisen kuvarivin kohdalla. o Satelliitisensorit liikkuvat tasaista rataa pitkin, jolloin rivigeometrian käsittely on varsin helppoa. Sensorin sijaintia voidaan mallintaa esim. säteeltään muuttuvana ympyrämäisenä ratana ja kulmia esim. 2 asteen polynomeilla. o Ilmakuvauksessa sensorin like on epätasaista. Alustan liikkeet tulee rekisteröidä tarkasti suurella taajuudella (esim. 200 Hz). Tästä johtuen kiinteä osa pushbroomgeometrialla toimivia ilmakuvakameroita on GPS/IMU suora sensoriorientointi 2
, toinen eteen (Stereo 6) ja kolmas taakse (Stereo 7).")

3 MOMS-02 Sensoreiden konfigurointi MOMS-02 kamerassa. (DLR, 1996 ) Three-line scanner MOMS-02 -kamerassa. Kamerassa on kolme rivianturia, yksi suoraan alas (Stereo 5), toinen eteen (Stereo 6) ja kolmas taakse (Stereo 7). Kolmirivikeilaimessa saadaan aikaan keskusprojektiokuva myös keilaussuunnassa. (DLR, 1996 ) ADS40 Lähde: S2003: ADS40 Airborne Digital Sensor Brochure ADS40 Airborne Digital Sensor Product Description 3



4 Leica Geosystems ADS40 ADS40: Layout of the focal plane (Fricker 2001) (Rainer Sandau, Peter Fricker, A. Stuart Walker, 1999) 4


5 Leica Geosystems: ADS40 presentation Telecentric lens. ADS40 Airborne Digital Sensor Brochure 5


6 Trichroid filter. ADS40 Airborne Digital Sensor Brochure ADS40 Airborne Digital Sensor Brochure 6


7 Tiedonkeruu lennon aikana. ADS40 Airborne Digital Sensor Brochure Spectral channels of selected airborne and spaceborne instruments. Reulke, R., Film-based and Digital Sensors Augmentation or Change in Paradigm? Photogrammetric Week 2003, pp

8 Analogisen ja digitaalisen ilmakuvauksen prosessit. ADS40 Airborne Digital Sensor Brochure ADS40 datan prosessointi. ftp://ftp.gis.leica-geosystems.com/outgoing/docs/ada/ads40_software_brochure.pdf 8
 Puretaan POS- ja kuvadata MM40-massamuistista o Level 0: raakakuvat Prosessoidaan GPS/IMU-data (Applanix PosProc) o Lennonaikaiset kuvien sijainnit")
9 ADS40 ground processing. ftp://ftp.gis.leica-geosystems.com/outgoing/docs/ada/ads40_software_brochure.pdf Ground processing (Leica Geosystems:n prosessi) Puretaan POS- ja kuvadata MM40-massamuistista o Level 0: raakakuvat Prosessoidaan GPS/IMU-data (Applanix PosProc) o Lennonaikaiset kuvien sijainnit ja kallistukset Kuvien oikaisu o Level 1: kuvausalustan liikkeistä korjatut pankromaattiset stereokuvat ja multispektraalit kuvat Semi-automaattinen kolmiointi ilman maastotukea ja maastotuen kanssa Korkeusmallien tuottaminen Ortokuvien tuottaminen o Level 2. Geokoodattu data (georeferoidut kuvat): pankromaattiset ja multispektraalit kuvat. Kuvien käsittelyssä tulee huomioida pushbroom-geometria (niitä ei siis voida käsitellä suoraan keskusprojektioon perustuvilla menetelmillä) 9


10 (Rainer Sandau, Peter Fricker, A. Stuart Walker, 1999) 10
 Ominaisuudet Perustuu lähteeseen: http://www.gis.leica-geosystems.com/products/airborne_sensors.")
11 "Roll" on kiertokulma koneen rungon suuntaisen koordinaattiakselin ympäri (= omega), "pitch" on kiertokulma siipien suuntaisen koordinaattiakselin ympäri, ja "yaw" on kiertokulma pystyakselin ympäri. (Rainer Sandau, Peter Fricker, A. Stuart Walker, 1999) Ominaisuudet Perustuu lähteeseen: Three sensors in one: black and white, color and false color images Digital sensors 12-bit data, high signal-to-noise ratio and linear response to incoming radiation Triple coverage allows image matching as well as stereoscopic viewing Strip rather than frame sensor avoids mosaicking in certain applications, for example in corridor projects and USGS DOQ/DOQQ orthorectified imagery Nadir band has little or no long track relief displacement, leading to excellent orthophotos, especially when combined with closely spaced strips Wide area coverage for savings in flight lines and flying time Common lens and focal plane, combined with uniform sensor model, simplifies coregistration of multispectral information RGB co-registration using trichroid device Reduced ground control owing to tight integration of focal plate, IMU and GPS and the complete absence of film errors Focal plate provides rigidity and a single unit for calibration, heating and cooling End-to-end digital flow line no chemical film processing or scanning 11
12 Complements LIDAR, even at flying heights above 2000 m The panchromatic arrays o pairs of CCD lines with 12,000 elements each (each panchromatic sensor is in fact two linear CCD arrays, each of 12,000 pixels, staggered by half a pixel (3.25 µm). This has been shown to generate a more detailed image than a single array of 12,000 pixels) o stereo angles of 14.2 and 28.4 (forward and backward array with angle 42.6 ) The multispectral elements are arranged such that the CCD lines capturing red, green and blue are 14.2 off nadir, on the other side from the forward panchromatic pair, whereas the near infrared (NIR) line is only around 2 off nadir. Field of view (FoV) across track of 64 providing excellent swath width and area coverage. The limiting factors in a sensor of this type are the read-out time of the arrays, which is up to 800 Hz in the ADS40, and the aircraft s speed over ground. At a typical flying speed over ground of 200 knots (370 km/h) and a flying height of 2880 m above ground level, the ground sample distance (GSD) is 30 cm, or 15 cm if the high resolution lines are used. The filters in the ADS40 provide the sensitivities for the multispectral bands; these have been carefully selected, by both DLR scientists and a group of specialist consultants, to provide not only optimal information for image interpretation but also aesthetically pleasing true color imagery. The bands chosen in many other sensors have been studied too so that those of most value to users can be selected. The challenge here is that ideal bands for remote sensing applications should be narrow and non-overlapping, whereas the requirement of high quality true color imagery normally dictates broad, overlapping bands. The Applanix POS is designed to offer high performance, reflecting the primary need for high frequency of measurement (200 Hz). The inertial measurement unit (IMU) itself is rigidly mounted on the focal plate such that there is no flexure or variability in its relationship to the lens and focal plate. The POS system also includes a GPS system. The positional information from the GPS and the attitude information from the IMU are combined to provide estimates of the aircraft s trajectory. ADS40 Airborne Digital Sensor Product Description 12
.")
 (Laurent Renouard and")

13 Ylhäällä radiometrialtaan korjatut raakakuvat (eteenpäin, nadiiri ja taaksepäin). Alhaalla epipolaarioikaistu stereopari (eteenpäin ja nadiiri) (Laurent Renouard and Frank Lehmann, 1999) Kahden stereonäkymän korrelointi sekä yhdistäminen. (Laurent Renouard and Frank Lehmann, 1999) 13
![CCD-matriiseihin perustuvat kamerat Manufacturer Model Photopixel Pxelsize [µm] Kodak KAI-11000M 4kx2.](/docs-images/59/43800641/images/14-0.png "6k 11 Mpixel Kodak KAF-16802CE 4kx4k 16 Mpixel Dalsa FTF4026 4kx2.")


14 CCD-matriiseihin perustuvat kamerat Manufacturer Model Photopixel Pxelsize [µm] Kodak KAI-11000M 4kx2.6k 11 Mpixel Kodak KAF-16802CE 4kx4k 16 Mpixel Dalsa FTF4026 4kx2.6k 11 Mpixel Dalsa FTF7040 7kx4k 28 Mpixel Atmel AT71201M 4kx4k 16 Mpixel Philips FTF x Mpixel Fairchild Imaging CCD x Mpixel Reulke 2003: Saatavilla olevia CCD-matriisit. Kaksi suurinta matriisia ovat vielä kokeiluasteella. Z/I DMC Zeiss'in digitaalinen kartoituskamera, joka koostuu kahdeksasta erillisestä, toisiinsa kiinteästi kytketystä kamerasta. Neljä pankromaattista kameraa (4 k x 7 k) kuvaa kukin oman neljänneksensä kuvaalasta ja neljä värikameraa (R, G, B, VNIR; 3k x 2k) kuvaavat koko kuva-alan. (Alexander Hinz, 1999) 14


15 (c) Z/I Imaging (c) Z/I Imaging (Digital mapping camera system-esite, S2003, 15
 Kompensoitu ja kompensoimaton kuvaliike.")
16 Kuvaliikkeen kompensointi Forward Image Motion=FIM=f*V*t/H, missä f=polttoväli, V=maanopeus, t=valotusaika ja H=lentokorkeus. DMC:ssä FMC kompensoidaan elektronisesti. Kuvaliikken kompensointi. (Alexander Hinz, 1999) Kompensoitu ja kompensoimaton kuvaliike. (Alexander Hinz, 1999) Components (Digital mapping camera system-esite, S2003) The DMC system includes the following components DMC main camera assembly o 4 high-resolution 7k x 4k PAN camera heads o 4 multispectral 3k x 2k camera heads o Camera electronic unit o 3 Mission Data Recorders each with 280 GB disk space for 840 GB of total in flight data storage Airborne Sensor Management System (ASMS), including the following components: o ASMS core software 16
 http://www.ziimaging.com/ 14k x 8k High Resolution Panchromatic and Multispectral Field of view: 69.")
17 o ASMS sensor control module for the DMC o Video camera T-AS Gyro Stabilized Camera Suspension Mount T-AS Adapter Ring Kit Ground-based post processing system ImageStation Mission Planning Software Specifications (Digital mapping camera system-esite, S2003) 14k x 8k High Resolution Panchromatic and Multispectral Field of view: 69.3 cross track, 42 along track Panchromatic: o 7,680 x 13,824 pixels (Final output image) o Raw PAN camera resolution: (each) = 7k + 4k o Lens system: 4: x f = 120mm/1:4.0 Multispectral o 4: RGB and Near-IR (others available on request) o Raw MS camera resolution: 3K x 2K pixel o Composited image resolution: 7,680 x 13,824 pixels (final output image) o Lens system: 4: x f = 25mm/1:4.0 Shutter and f-stop: Continuously variable 1/50-1/300 sec, f/4-f/22 On-board storage capacity (Mission Data Recorders): 840 GB (>2,000 images) Maximum frame rate 2 sec / image Radiometric resolution 12 bit (all cameras) Camera weight < 80 kg MDR (total) weight 115 kg Datan jälkikäsittely (Digital mapping camera system-esite, S2003) Radiometria: Lämpötilan, apertuurin ja muiden radiometristen tekijöiden eliminointi Geometria: Osakuvilta eliminoidan linssivääristymien ja kallistumien vaikutukset,. Tämän jälkeen suoritetaan liitospisteen mittaus kuvien peittoalueella ja kuvat mosaikoidaan yhdeksi laajaksi kuvaksi. Lopputuotteet: o Täydet 7680x13824-kokoiset PAN-, RGB- ja CIR-kuvat o Värikuvaresoluutiolla 2048x3072: RGB, CIR, R, G, B, NIR Esim. H=400 m, v=130 knots, 60% stereo => GSD=4 cm. Vexcel Ultracam (c) Vexcel Imaging Austria. 17


18 (c) Vexcel Imaging Austria. Syntopic imaging (c) Vexcel Imaging Austria. Ultracam presentation. 18

19 UltraCamD Technical Specifications Syksy 2003, Image Product Specification o Image format Analogous to an aerial film image at a format of 23 cm x 15 cm o Image content when compared to aerial film superior to film scanned at 15 mm pixel size o Image data formats TIFF, JPEG, Tiled TIFF Digital Camera Technical Data (Sensor Unit SU) o Panchromatic image size * 7500 pixels o Panchromatic physical pixel size 9 µm o Physical format of the focal plane mm * 67.5 mm o Panchromatic lens focal distance (Alternative exchangeable lenses) 100 mm (75 mm, 125 mm) o Lens aperture f= 1/5.6 o Angle-of-view from vertical, cross track (along track) 55 (37 ) o Color (multi-spectral capability) 4 channels -- RGB & NIR o Color image size 4008 * 2672 pixels o Color physical pixel size 9 µm o Color lens system focal distance 28 mm o Color lens aperture f = 1/4.0 o Color field of view from vertical, cross track (along track) 65 (46 ) o Shutter speed options 1/500 to 1/60 o Forward-motion compensation (FMC) TDI controlled o Maximum FMC-capability 50 pixels o Smallest pixels on the ground at flying height of 500 m (at 300m) 5 cm (3cm) o Frame rate per second (minimum inter-image interval) 1.3 frames (0.75 seconds) o Analog-to-digital conversion at 14 bits o Radiometric resolution in each color channel >12 bit o Physical dimensions of the camera unit 45 cm x 45 cm x 60 cm o Weight < 30 kg o Power consumption at full performance 150 W Controller, Data Storage and Processing Unit (SCU) o In-flight storage capacity > 1 TB o Capacity to collect in-flight uncompressed frames > 1850 o Storage and computing configuration Parallel arrangement with multiple CPUs and disks o Redundancy Dual disks containing mirror images of the data o Data transfer into office environment Removable, dual use as office post-processor o Physical dimensions 40 cm x 55 cm x 65 cm o Weight < 35 kg o Power consumption at full performance 700 W Power Supply (optional) 19
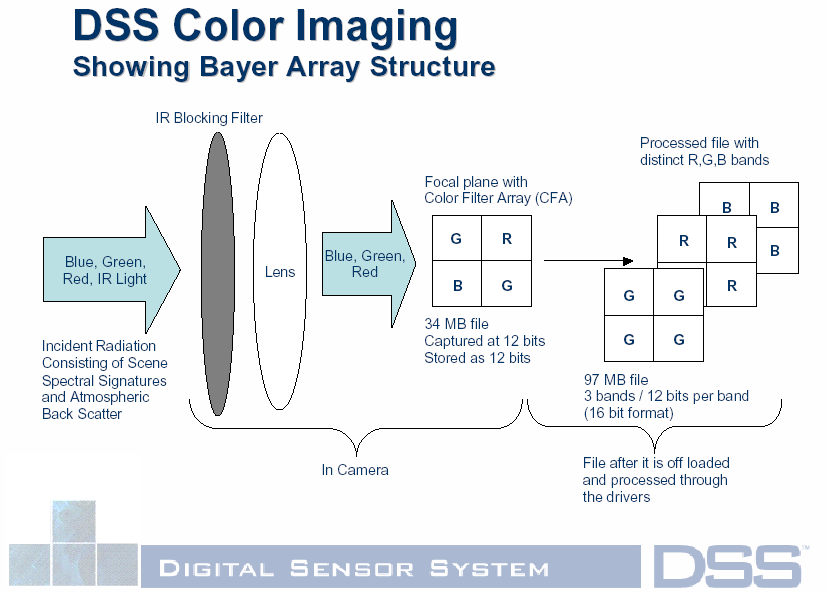
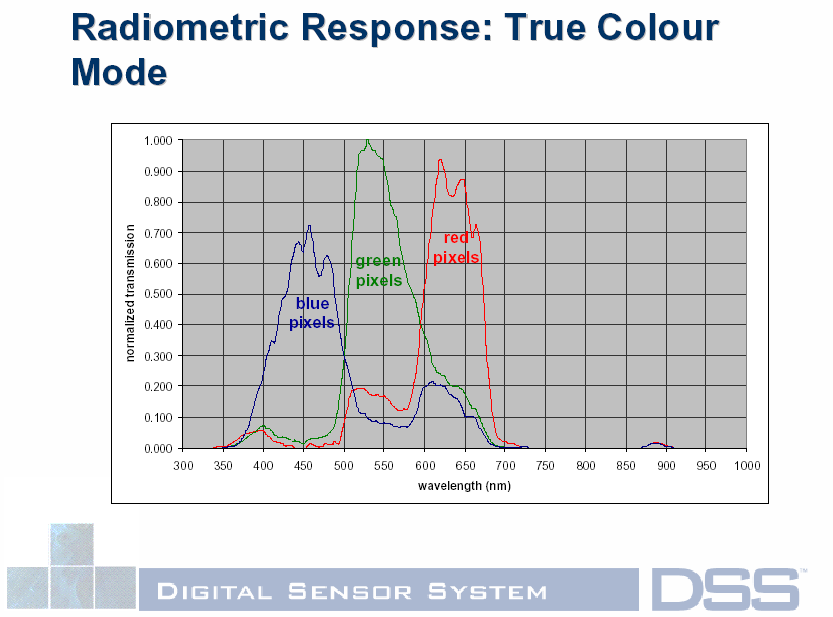
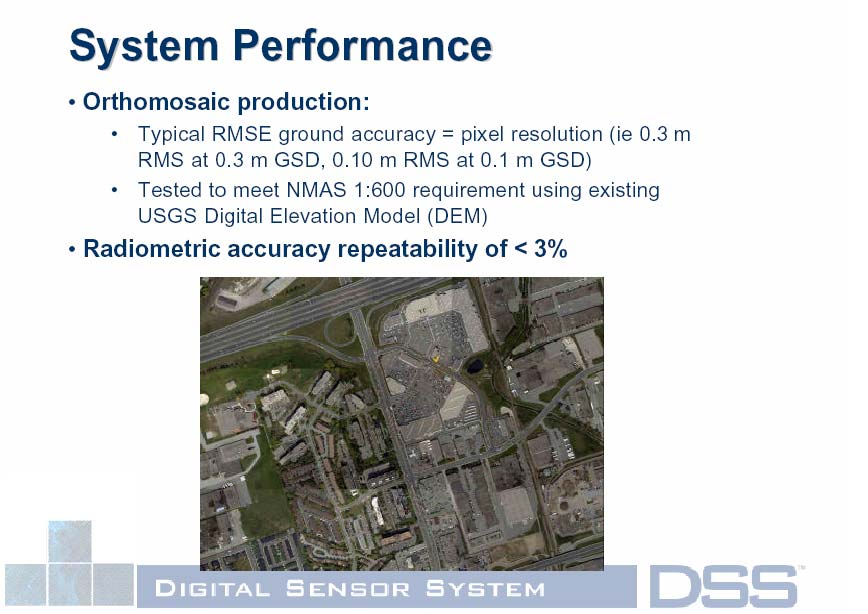
20 o Set of PB-gel Storage Batteries 24 V / 70 Ah o Operating Time, stand by (full operation at max. frame rate) 10 h (1.5 h) o Physical dimensions 45 cm x 30 cm x 50 cm o Weight 2 x 35 kg Operational Specification o Maximum collection period at 70% forward overlap, at 20 cm GSD (film scale 1:10,000) ~ 6 hours o Post-processing of collected raw image streams Overnight on SCU o Data transfer from aircraft to office By mobile server or by physical transfer of 35 kg SCU o Post-processing system Accomplished inside the SCU, or at office PC network o Mounting of the camera In current film camera mounts o Flight planning support Compatible with IGI's CCNS and similar systems o Exterior orientation support Compatible with IGI's Aero-Control, Applanix' Pos and similar systems o Image geometric accuracy < ± 2 micrometers Emerge DSS Ominaisuudet (Mostafa 2003) DSS: Digital sensor system Perustuu monitieteelliseen kehitystyöhön (mm. fotogrammetria, navigointi, CCDteknologia) Täysin operationaalinen, integroitu ja digitaalinen monisensorisysteemi, joka on kehitetty digitaalisen karttatiedon keruuseen. DSS:n osat ovat 4Kx4K digitaalinen kamera, Applanix POS/AV, lennonhallintajärjestelmä Polttovälit 55 mm (37 FOV, standard) ja 35 mm (55.4 FOV, optional) DSS:ä käytetään ensisijaisesti suuriresoluutioisten väri- ja vääräväriortokuvien tuottamiseen suoran georeferoinnin avulla Ortokuvat tuotetaan käyttäen POS/AV suoria ulkoisen orientoinnin havaintoja sekä olemassaolevaa korkeusmallia GSD= m Tarkoitettu pienehköihin projekteihin, joiden tarkkuus ja resoluutiovaatimukset eivät ole äärimmäisen korkeat 20

21 DSS overview presentation: DSS overview presentation: 21

22 DSS overview presentation: DSS overview presentation: 22

23 DSS overview presentation: DSS overview presentation: 23

24 DSS overview presentation: DSS overview presentation: 24
25 Rivi- ja matriisikameroiden vertailua Matriisikameran etuja rivigeometriaan verrattuna ovat keskusprojektio kuvien helppo liittäminen olemassaoleviin systeemeihin vähäisempi jälkiprosessointi FMC on mahdollinen matriisikameroilla, mutta ADS40:llä se ei onnistu Matriisikameroilla värillinen stereo Rivikamera on riippuvainen GPS/IMU-datasta, vaatii tiheää GPS-tukiasemaverkkoa Rivikameroilla ei voi tehdä korjauksia kuvanottopaikkojen välillä, mikä on vaativaa pilotille Mahdollisia matriisikameroiden ongelmia ovat Laajojen CCD-matriisien puute Hinta Matriisin lukunopeus (tarvitaan suljinta) Spektraalien kanavien toteutus: suurempi GSD kuin pankromaattisella kanavalla, täysi resoluutio yhdistämällä PAN-kromaattiseen kanavaan Systeemi koostuu useasta kamerasta, mikä heikentää geometriaa Kameroiden tekninen toteutus on varsin erilainen ja puolueetonta tutkimustietoa kameroiden ominaisuuksista ei vielä ole saatavilla. Ominaisuus Z/I DMC LH-Systems ADS40 Vexcel UltraCam Kuvat PAN R, G, B, VNIR (fuusio) PAN R, G, B, VNIR (täysi resoluutio) PAN R, G, B, VNIR (fuusio) Kuvakoko PAN: 7680 x (4 convergent 7kx4k) MS: 3 k x 2 k 10 rivi CCD:tä (15 paikkaa) PAN: (x2) 3 limitettyä paria (nadiiri, eteen- ja PAN: 7500x11500 (9 CCDkameraa) MS: 4008x2673 taaksepäin: 14, 28, 42 ) MS: Radiometria 12 bit/pixel 12 bit/pixel 12 bit/pixel Polttoväli PAN: f=120 mm MS: f=25 mm F=62.77 mm PAN: f=100 mm MS: f=28 mm Pikselikoko* Kuvalla: 12 µm *Maastossa (PAN) 0.04 m -> Kuvalla: 6.5 µm Maastossa: 0.15 m -> Kuvalla: 9 µm *Maastossa (PAN): 0.03 m -> Kuvanottoväli 2 s 0.75 s (1.3 kuvaa/s) FOV across /along track (deg) 69/42 64 across track PAN: 55/37 MS: 65/46 IMU Optionaalinen On Optionaalinen FMC On Ei On Kuvien laskeminen Automaattinen liitospisteenmittaus Applanix GPS/IMU Automaattinen liitospisteenmittaus Muuta Monta CCD:tä, kullakin oma Yksi linssi PAN linssi. Master: 4 CCD, 1 linssi Slave 1: 2 CCD, yksi linssi Slave 2: 2 CCD, yksi linssi Slave 3: 1 CCD, yksi linssi 4 MS: kullakin oma linssi *)Matriisikameroiden kohdalla ei varmaa tietoa pienimmästä pikselikoosta 25

 (Rainer Sandau, Peter")
 26")
26 Vertailu sensoreiden konfiguronnista ADS40- kamerassa ja CCD-matriiseihin perustuvassa kamerassa. (Rainer Sandau, Peter Fricker, A. Stuart Walker, 1999) (Rainer Sandau, Peter Fricker, A. Stuart Walker, 1999) (Rainer Sandau, Peter Fricker, A. Stuart Walker, 1999) 26

27 Digitaali- ja analogiailmakuvauksen eroista Digitaalisen kuvauksen etuja: Pankromaattinen- ja multispektraali-informaatio saadaan kerättyä kerralla Täysin digitaalinen prosessointi o Datan prosessointi nopeutuu o Ei filmin kehitystä o Ei skannausta o Vähemmän käsityötä Parempi radiometria o 12 bit vs. 8 bit o Sensorin vaste lineaarinen o Dataa voidaan paremmin hyödyntää kaukokartoitussovellutuksissa. o Paremman radiometrian ansiosta mittauksia voidaan tehdä myös varjoissa Ei filmin rakeisuutta(edut: kuvaus huonommilla säillä, parempi sovitustarkkuus, automaatio ja tulkittavuus) Ei filmin muodonmuutoksia: geometria säilyy, saattaa myös vähentää maastotuen tarvetta kolmioinnissa Kopiointi helppoa Ei erillistä sisäisen orientoinnin määritystä Soveltuu sekä kartoitus että kaukokartoitustehtäviin Pieni- ja keskiformaattiset digitaaliset kamerat edullisempia kuin filmikamerat Mahdollisia haittoja Digitaalisilla kameroilla ei välttämättä saavuteta pienintä mahdollista pikselikokoa. Systeemien tomintaa operationaalisessa käytössä ei ole vielä todistettu. Systeemien kuvausgeometria ei ole yhtä kiinteä kuin analogisilla kameroilla. Varsinkin ADS40 on hyvin dynaaminen. Alustavien tutkimusten mukaan DMC:n ja Ultracamin geometrinen tarkkuus on verrattavissa analogisiin kameroihin. Suuriformaattiset digitaaliset kamerat ovat hyvin kalliita Ylläpito, päivittäminen, kalibrointi Digitaalisen kuva-aineiston massiivinen jälkiprosessointi Digitaalisen kuva-aineiston arkistointi Leberl, Gruber, Flying the New Large Format Digital Aerial Camera Ultracam. Photogrammetric week 2003, pp Skannatun ilmakuvan (GSD=15 cm) ja Ultracam-kuvan (GSD=17 cm) vertailu. Kirjallisuutta Kirjat o Ron Graham and Alexander Koh, Digital Aerial Survey: Theory and Practise. ISBN o ASPRS Chapter 8.2 Digital Cameras. Manual of Photogrammetry, s Internet 27
28 o Fricker, P., ADS40-Progress in digital aerial data collections. In Photogrammetric Week 01, Wichmann. p Photogrammetric Week '01. o Alexander Hinz, The Z/I Imaging Aerial Camera System, in: Photogrammetric Week '99, Wichmann, p Photogrammetric Week '99. o Leberl, F., Gruber, M., Flying the New Large Format Digital Aerial Camera Ultracam. in: Photogrammetric Week '03, Wichmann, p o Mostafa, M. M. R., Design and Performance of the DSS. in: Photogrammetric Week '03, Wichmann, p o Laurent Renouard and Frank Lehmann, High Resolution Digital Surface Models and Orthoimages for Telecom Network Planning, in: Photogrammetric Week '99, Wichmann, p Photogrammetric Week '99. o Reulke, R., Film-based and Digital Sensors Augementation or Change in Paradigm? in: Photogrammetric Week '03, Wichmann, p o Rainer Sandau, Peter Fricker, A. Stuart Walker, Digital photogrammetric cameras: possibilities and problems, in: Photogrammetric Week '99, Wichmann, p Photogrammetric Week '99 Linkit kameroihin o Leica Geosystems ADS40 o Vexcel Ultracam o Z/I Imaging DMC o Emerge:n DSS (Digital Sensor System) Maa Fotogrammetrinen kartoitus Luento-ohjelma
Suuriformaattiset digitaaliset ilmakuvakamerat
 Maa 57.270, Fotogrammetrian, kaukokartoituksen ja kuvantulkinnan seminaari Suuriformaattiset digitaaliset ilmakuvakamerat 2007 Lauri Saarinen Sisällysluettelo 1 Johdanto...3 2 Digitaalinen ilmakuvakamera...3
Maa 57.270, Fotogrammetrian, kaukokartoituksen ja kuvantulkinnan seminaari Suuriformaattiset digitaaliset ilmakuvakamerat 2007 Lauri Saarinen Sisällysluettelo 1 Johdanto...3 2 Digitaalinen ilmakuvakamera...3
FOTOGRAMMETRINEN PISTETIHENNYS
 FOTOGRAMMETRINEN PISTETIHENNYS 1. Yleistä 2. Ilmakuvaus SKM Gisair Oy Työssä määritettiin ulkoinen orientointi Sotkamon kunnan keskustan alueen ilmakuvaukselle. Ilmakuvauksen teki SKM Gisair Oy keväällä
FOTOGRAMMETRINEN PISTETIHENNYS 1. Yleistä 2. Ilmakuvaus SKM Gisair Oy Työssä määritettiin ulkoinen orientointi Sotkamon kunnan keskustan alueen ilmakuvaukselle. Ilmakuvauksen teki SKM Gisair Oy keväällä
LYTH-CONS CONSISTENCY TRANSMITTER
 LYTH-CONS CONSISTENCY TRANSMITTER LYTH-INSTRUMENT OY has generate new consistency transmitter with blade-system to meet high technical requirements in Pulp&Paper industries. Insurmountable advantages are
LYTH-CONS CONSISTENCY TRANSMITTER LYTH-INSTRUMENT OY has generate new consistency transmitter with blade-system to meet high technical requirements in Pulp&Paper industries. Insurmountable advantages are
7.4 Variability management
 7.4 Variability management time... space software product-line should support variability in space (different products) support variability in time (maintenance, evolution) 1 Product variation Product
7.4 Variability management time... space software product-line should support variability in space (different products) support variability in time (maintenance, evolution) 1 Product variation Product
Results on the new polydrug use questions in the Finnish TDI data
 Results on the new polydrug use questions in the Finnish TDI data Multi-drug use, polydrug use and problematic polydrug use Martta Forsell, Finnish Focal Point 28/09/2015 Martta Forsell 1 28/09/2015 Esityksen
Results on the new polydrug use questions in the Finnish TDI data Multi-drug use, polydrug use and problematic polydrug use Martta Forsell, Finnish Focal Point 28/09/2015 Martta Forsell 1 28/09/2015 Esityksen
Luento 13: Ympäristömallien tiedonkeruu
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 13: Ympäristömallien tiedonkeruu Luento 13: Ympäristömallien tiedonkeruu 3-D mallien tiedonkeruu Ilmakuvauksen
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 13: Ympäristömallien tiedonkeruu Luento 13: Ympäristömallien tiedonkeruu 3-D mallien tiedonkeruu Ilmakuvauksen
Capacity Utilization
 Capacity Utilization Tim Schöneberg 28th November Agenda Introduction Fixed and variable input ressources Technical capacity utilization Price based capacity utilization measure Long run and short run
Capacity Utilization Tim Schöneberg 28th November Agenda Introduction Fixed and variable input ressources Technical capacity utilization Price based capacity utilization measure Long run and short run
Radanrakentamisen 3D-lähtötietomallin mittaus (Case Jorvas, UAS)
") RYM PRE InfraFINBIM, Pilottipäivä nro 5, 3.10.2012 VTT, Vuorimiehentie 3, Espoo Radanrakentamisen 3D-lähtötietomallin mittaus (Case Jorvas, UAS) Rauno Heikkilä, Oulun yliopisto Tausta 3D-lähtötietojen
RYM PRE InfraFINBIM, Pilottipäivä nro 5, 3.10.2012 VTT, Vuorimiehentie 3, Espoo Radanrakentamisen 3D-lähtötietomallin mittaus (Case Jorvas, UAS) Rauno Heikkilä, Oulun yliopisto Tausta 3D-lähtötietojen
National Building Code of Finland, Part D1, Building Water Supply and Sewerage Systems, Regulations and guidelines 2007
 National Building Code of Finland, Part D1, Building Water Supply and Sewerage Systems, Regulations and guidelines 2007 Chapter 2.4 Jukka Räisä 1 WATER PIPES PLACEMENT 2.4.1 Regulation Water pipe and its
National Building Code of Finland, Part D1, Building Water Supply and Sewerage Systems, Regulations and guidelines 2007 Chapter 2.4 Jukka Räisä 1 WATER PIPES PLACEMENT 2.4.1 Regulation Water pipe and its
FYSE301(Elektroniikka(1(A3osa,(kevät(2013(
 FYSE301(Elektroniikka(1(A3osa,(kevät(2013( 1/2 Loppukoe1.3.2013 vastaakaikkiinkysymyksiin(yhteensä48pistettä) 1. Kuvailelyhyesti a. Energialineaarisissapiirielementeissä:vastuksessa,kondensaattorissajakelassa(3
FYSE301(Elektroniikka(1(A3osa,(kevät(2013( 1/2 Loppukoe1.3.2013 vastaakaikkiinkysymyksiin(yhteensä48pistettä) 1. Kuvailelyhyesti a. Energialineaarisissapiirielementeissä:vastuksessa,kondensaattorissajakelassa(3
1. SIT. The handler and dog stop with the dog sitting at heel. When the dog is sitting, the handler cues the dog to heel forward.
 START START SIT 1. SIT. The handler and dog stop with the dog sitting at heel. When the dog is sitting, the handler cues the dog to heel forward. This is a static exercise. SIT STAND 2. SIT STAND. The
START START SIT 1. SIT. The handler and dog stop with the dog sitting at heel. When the dog is sitting, the handler cues the dog to heel forward. This is a static exercise. SIT STAND 2. SIT STAND. The
KMTK lentoestetyöpaja - Osa 2
 KMTK lentoestetyöpaja - Osa 2 Veijo Pätynen 18.10.2016 Pasila YHTEISTYÖSSÄ: Ilmailun paikkatiedon hallintamalli Ilmailun paikkatiedon hallintamalli (v0.9 4.3.2016) 4.4 Maanmittauslaitoksen rooli ja vastuut...
KMTK lentoestetyöpaja - Osa 2 Veijo Pätynen 18.10.2016 Pasila YHTEISTYÖSSÄ: Ilmailun paikkatiedon hallintamalli Ilmailun paikkatiedon hallintamalli (v0.9 4.3.2016) 4.4 Maanmittauslaitoksen rooli ja vastuut...
Efficiency change over time
 Efficiency change over time Heikki Tikanmäki Optimointiopin seminaari 14.11.2007 Contents Introduction (11.1) Window analysis (11.2) Example, application, analysis Malmquist index (11.3) Dealing with panel
Efficiency change over time Heikki Tikanmäki Optimointiopin seminaari 14.11.2007 Contents Introduction (11.1) Window analysis (11.2) Example, application, analysis Malmquist index (11.3) Dealing with panel
YKJ ETRS (usein joutuu säätämään itse)
") GPS-järjestelmästä ja kaukokartoituksesta Kertausta GPS-järjestelmästä GPS:n käyttämät koordinaatistot Sisäisesti GPS-järjestelmä käyttää WGS84-pallokoordinaatistoa Koordinaatit voidaan projisoida lennossa
GPS-järjestelmästä ja kaukokartoituksesta Kertausta GPS-järjestelmästä GPS:n käyttämät koordinaatistot Sisäisesti GPS-järjestelmä käyttää WGS84-pallokoordinaatistoa Koordinaatit voidaan projisoida lennossa
KUVANMUODOSTUMINEN INSTRUMENTIT KAUKOKARTOITUSINSTRUMENTIT
 KUVANMUODOSTUMINEN INSTRUMENTIT 1. KESKUSPROJEKTIO 2. ILMAKUVAKAMERAT o ANALOGISET o DIGITAALISET 3. KEILAIMET 4. PASSIIVINEN JA AKTIIVINEN KUVAUS 5. TUTKAT 6. LASERKEILAIMET KAUKOKARTOITUSINSTRUMENTIT
KUVANMUODOSTUMINEN INSTRUMENTIT 1. KESKUSPROJEKTIO 2. ILMAKUVAKAMERAT o ANALOGISET o DIGITAALISET 3. KEILAIMET 4. PASSIIVINEN JA AKTIIVINEN KUVAUS 5. TUTKAT 6. LASERKEILAIMET KAUKOKARTOITUSINSTRUMENTIT
MIGS videoendoskooppi
 Endoskoopit MIGS videoendoskooppi Käyttökohteet: Piilo-onteloiden tähystys 4,5-350mm putkien tähystys Moottorin tutkiminen. Kulman taakse ontelossa tähystys Tärkeimmät ominaisuudet: Vaihdettavat Videokaapelit
Endoskoopit MIGS videoendoskooppi Käyttökohteet: Piilo-onteloiden tähystys 4,5-350mm putkien tähystys Moottorin tutkiminen. Kulman taakse ontelossa tähystys Tärkeimmät ominaisuudet: Vaihdettavat Videokaapelit
Luento Fotogrammetrian perusteet. Henrik Haggrén
 Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
16. Allocation Models
 16. Allocation Models Juha Saloheimo 17.1.27 S steemianalsin Optimointiopin seminaari - Sks 27 Content Introduction Overall Efficienc with common prices and costs Cost Efficienc S steemianalsin Revenue
16. Allocation Models Juha Saloheimo 17.1.27 S steemianalsin Optimointiopin seminaari - Sks 27 Content Introduction Overall Efficienc with common prices and costs Cost Efficienc S steemianalsin Revenue
TÄYTTÖAUTOMAATIT TÄYTTÖAUTOMAATIT COMPUTER INFLATORS
 31 S AHCON computer inflators are designed with a view to high quality, precision and long service life. The inflation computers are designed in Denmark and manufactured and tested in our own workshop.
31 S AHCON computer inflators are designed with a view to high quality, precision and long service life. The inflation computers are designed in Denmark and manufactured and tested in our own workshop.
GNSS-vastaanottimet. Havaintosuureet
 GNSS-vastaanottimet vastanottimien tyyppejä antennit signaalin havaitseminen Havaintosuureet Nyt: C/A-koodi L1 L1-kantoaalto L1 Doppler L2 kantoaalto L2 Doppler P-koodi L1 P-koodi L2 Tulevaisuudessa: C/A-koodi
GNSS-vastaanottimet vastanottimien tyyppejä antennit signaalin havaitseminen Havaintosuureet Nyt: C/A-koodi L1 L1-kantoaalto L1 Doppler L2 kantoaalto L2 Doppler P-koodi L1 P-koodi L2 Tulevaisuudessa: C/A-koodi
I. Principles of Pointer Year Analysis
 I. Principles of Pointer Year Analysis Fig 1. Maximum (red) and minimum (blue) pointer years. 1 Fig 2. Principle of pointer year calculation. Fig 3. Skeleton plot graph created by Kinsys/Kigraph programme.
I. Principles of Pointer Year Analysis Fig 1. Maximum (red) and minimum (blue) pointer years. 1 Fig 2. Principle of pointer year calculation. Fig 3. Skeleton plot graph created by Kinsys/Kigraph programme.
Metsälamminkankaan tuulivoimapuiston osayleiskaava
 VAALAN KUNTA TUULISAIMAA OY Metsälamminkankaan tuulivoimapuiston osayleiskaava Liite 3. Varjostusmallinnus FCG SUUNNITTELU JA TEKNIIKKA OY 12.5.2015 P25370 SHADOW - Main Result Assumptions for shadow calculations
VAALAN KUNTA TUULISAIMAA OY Metsälamminkankaan tuulivoimapuiston osayleiskaava Liite 3. Varjostusmallinnus FCG SUUNNITTELU JA TEKNIIKKA OY 12.5.2015 P25370 SHADOW - Main Result Assumptions for shadow calculations
C470E9AC686C
 INVENTOR 17 VALUOSAN SUUNNITTELU http://help.autodesk.com/view/invntor/2017/enu/?guid=guid-b3cd4078-8480-41c3-9c88- C470E9AC686C About Mold Design in Inventor Mold Design provides integrated mold functionality
INVENTOR 17 VALUOSAN SUUNNITTELU http://help.autodesk.com/view/invntor/2017/enu/?guid=guid-b3cd4078-8480-41c3-9c88- C470E9AC686C About Mold Design in Inventor Mold Design provides integrated mold functionality
Kitchen Pendant 2/10/19
 Kitchen Pendant Kitchen Pendant Dining Area Dining Area Living Area Dining Area Bathroom 201 Quantity: 2 W A L L C O L L E C T I O N Voto Wall Square DESCRIPTION The Voto light by Tech Lighting is simply
Kitchen Pendant Kitchen Pendant Dining Area Dining Area Living Area Dining Area Bathroom 201 Quantity: 2 W A L L C O L L E C T I O N Voto Wall Square DESCRIPTION The Voto light by Tech Lighting is simply
Tynnyrivaara, OX2 Tuulivoimahanke. ( Layout 9 x N131 x HH145. Rakennukset Asuinrakennus Lomarakennus 9 x N131 x HH145 Varjostus 1 h/a 8 h/a 20 h/a
 , Tuulivoimahanke Layout 9 x N131 x HH145 Rakennukset Asuinrakennus Lomarakennus 9 x N131 x HH145 Varjostus 1 h/a 8 h/a 20 h/a 0 0,5 1 1,5 km 2 SHADOW - Main Result Assumptions for shadow calculations
, Tuulivoimahanke Layout 9 x N131 x HH145 Rakennukset Asuinrakennus Lomarakennus 9 x N131 x HH145 Varjostus 1 h/a 8 h/a 20 h/a 0 0,5 1 1,5 km 2 SHADOW - Main Result Assumptions for shadow calculations
TERRASOLID Terrasolidin ratkaisut UAVkartoitussovelluksiin Kimmo Soukki
 www.terrasolid.com TERRASOLID Terrasolidin ratkaisut UAVkartoitussovelluksiin Kimmo Soukki 20.9.2018 SOLUTIONS FOR DATA CAPTURE Terrasolid UAV Tekniikoista Terrasolid tuotteet Fotopistepilvet UAV LiDAR
www.terrasolid.com TERRASOLID Terrasolidin ratkaisut UAVkartoitussovelluksiin Kimmo Soukki 20.9.2018 SOLUTIONS FOR DATA CAPTURE Terrasolid UAV Tekniikoista Terrasolid tuotteet Fotopistepilvet UAV LiDAR
Technical specification
 Technical specification 10 CCD CAMERA 100m 0-50m 1 5 CL 7661001_001.AI 00697 00m 00m 15 4 14 1 CL 7661001_00.AI 100697 CL 46610005/1G 0 1 1 Pick-up device No. of picture elements (H) x (V) Horizontal resolution
Technical specification 10 CCD CAMERA 100m 0-50m 1 5 CL 7661001_001.AI 00697 00m 00m 15 4 14 1 CL 7661001_00.AI 100697 CL 46610005/1G 0 1 1 Pick-up device No. of picture elements (H) x (V) Horizontal resolution
The CCR Model and Production Correspondence
 The CCR Model and Production Correspondence Tim Schöneberg The 19th of September Agenda Introduction Definitions Production Possiblity Set CCR Model and the Dual Problem Input excesses and output shortfalls
The CCR Model and Production Correspondence Tim Schöneberg The 19th of September Agenda Introduction Definitions Production Possiblity Set CCR Model and the Dual Problem Input excesses and output shortfalls
Maa-57.1030 Fotogrammetrian perusteet ILMAKUVAUS
 Maa-57.1030 Fotogrammetrian perusteet ILMAKUVAUS (Alkuperäinen luento: Henrik Haggrén 2003) (Päivitykset: Katri Koistinen 2004,Anita Laiho-Heikkinen 2007) 2008 Jussi Heikkinen, Jussi.Heikkinen@tkk.fi Ilmakuvaus
Maa-57.1030 Fotogrammetrian perusteet ILMAKUVAUS (Alkuperäinen luento: Henrik Haggrén 2003) (Päivitykset: Katri Koistinen 2004,Anita Laiho-Heikkinen 2007) 2008 Jussi Heikkinen, Jussi.Heikkinen@tkk.fi Ilmakuvaus
( ( OX2 Perkkiö. Rakennuskanta. Varjostus. 9 x N131 x HH145
 OX2 9 x N131 x HH145 Rakennuskanta Asuinrakennus Lomarakennus Liike- tai julkinen rakennus Teollinen rakennus Kirkko tai kirkollinen rak. Muu rakennus Allas Varjostus 1 h/a 8 h/a 20 h/a 0 0,5 1 1,5 2 km
OX2 9 x N131 x HH145 Rakennuskanta Asuinrakennus Lomarakennus Liike- tai julkinen rakennus Teollinen rakennus Kirkko tai kirkollinen rak. Muu rakennus Allas Varjostus 1 h/a 8 h/a 20 h/a 0 0,5 1 1,5 2 km
Lämmitysjärjestelmät
 METSTA Rakennusten energiatehokkuusstandardit uudistuvat seminaari 26.4.2017 Lämmitysjärjestelmät Jarek Kurnitski HEAT GAINS BUILDING PROPERTIES CLIMATIC CONDITIONS INDOOR ENVIRONMENT REQUIREMENTS EN 16789-1
METSTA Rakennusten energiatehokkuusstandardit uudistuvat seminaari 26.4.2017 Lämmitysjärjestelmät Jarek Kurnitski HEAT GAINS BUILDING PROPERTIES CLIMATIC CONDITIONS INDOOR ENVIRONMENT REQUIREMENTS EN 16789-1
RULLARADAT RULLADAT ROLLER TABLES
 ROLLER TABLES Roller tables are an important element in an assembly line, where ergonomics and good workflow must be ensured. The roller tables guarantee that the wheels can be fed forward effortlessly
ROLLER TABLES Roller tables are an important element in an assembly line, where ergonomics and good workflow must be ensured. The roller tables guarantee that the wheels can be fed forward effortlessly
Returns to Scale II. S ysteemianalyysin. Laboratorio. Esitelmä 8 Timo Salminen. Teknillinen korkeakoulu
 Returns to Scale II Contents Most Productive Scale Size Further Considerations Relaxation of the Convexity Condition Useful Reminder Theorem 5.5 A DMU found to be efficient with a CCR model will also be
Returns to Scale II Contents Most Productive Scale Size Further Considerations Relaxation of the Convexity Condition Useful Reminder Theorem 5.5 A DMU found to be efficient with a CCR model will also be
Luento 7 Stereokartoituskojeet. 2007 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 7 Stereokartoituskojeet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2 Fotogrammetrinen prosessi 3 Stereokartoituskoje Stereokartoituskojeessa kuvaparin stereoskooppinen tarkastelu ja tarkka
Luento 7 Stereokartoituskojeet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2 Fotogrammetrinen prosessi 3 Stereokartoituskoje Stereokartoituskojeessa kuvaparin stereoskooppinen tarkastelu ja tarkka
Reliable sensors for industrial internet
 Reliable sensors for industrial internet 21.5.2015 Anu Kärkkäinen, PhD Research Team Leader VTT Technical Research Centre of Finland anu.karkkainen@vtt.fi Click to edit Master Contents title style Click
Reliable sensors for industrial internet 21.5.2015 Anu Kärkkäinen, PhD Research Team Leader VTT Technical Research Centre of Finland anu.karkkainen@vtt.fi Click to edit Master Contents title style Click
Q = pienin suunniteltu ilmamäärä ja k = puhaltimen tai iirispellin k-arvo.
 V1..12(1.1.215) 1 (6) Tämä ohje on tarkoitettu laitteille, joiden ohjelmistoversio on 1..12 tai uudempi. ILMAMÄÄRÄN MITTAUS Ilmamäärä voidaan mitata: 1. Virtausmittausliitännöillä varustetuista puhaltimista.
V1..12(1.1.215) 1 (6) Tämä ohje on tarkoitettu laitteille, joiden ohjelmistoversio on 1..12 tai uudempi. ILMAMÄÄRÄN MITTAUS Ilmamäärä voidaan mitata: 1. Virtausmittausliitännöillä varustetuista puhaltimista.
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
Särmäystyökalut kuvasto Press brake tools catalogue
 Finnish sheet metal machinery know-how since 1978 Särmäystyökalut kuvasto Press brake tools catalogue www.aliko.fi ALIKO bending chart Required capacity in kn (T) in relation to V-opening. V R A S = plates
Finnish sheet metal machinery know-how since 1978 Särmäystyökalut kuvasto Press brake tools catalogue www.aliko.fi ALIKO bending chart Required capacity in kn (T) in relation to V-opening. V R A S = plates
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
WindPRO version joulu 2012 Printed/Page :42 / 1. SHADOW - Main Result
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table 13.6.2013 19:42 / 1 Minimum
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table 13.6.2013 19:42 / 1 Minimum
Other approaches to restrict multipliers
 Other approaches to restrict multipliers Heikki Tikanmäki Optimointiopin seminaari 10.10.2007 Contents Short revision (6.2) Another Assurance Region Model (6.3) Cone-Ratio Method (6.4) An Application of
Other approaches to restrict multipliers Heikki Tikanmäki Optimointiopin seminaari 10.10.2007 Contents Short revision (6.2) Another Assurance Region Model (6.3) Cone-Ratio Method (6.4) An Application of
Kehittyvien satelliittiaineistojen mahdollisuudet
 VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD Kehittyvien satelliittiaineistojen mahdollisuudet Forest Big Data loppuseminaari, Heureka 8.3.2016 Tuomas Häme, Laura Sirro, Yrjö Rauste VTT VTT:n satelliittikuvatutkimusaiheet
VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD Kehittyvien satelliittiaineistojen mahdollisuudet Forest Big Data loppuseminaari, Heureka 8.3.2016 Tuomas Häme, Laura Sirro, Yrjö Rauste VTT VTT:n satelliittikuvatutkimusaiheet
Making diversity manageable. Miradore. Käytännön kokemuksia rahoituksen hakemisesta. Tiistai 17.4.2012 Technopolis Vapaudenaukio / Lappeenranta
 Miradore Käytännön kokemuksia rahoituksen hakemisesta Tiistai Technopolis Vapaudenaukio / Lappeenranta Miradore Ltd Established in 2006, spin-off from UPM The story started already in 1995 from a burning
Miradore Käytännön kokemuksia rahoituksen hakemisesta Tiistai Technopolis Vapaudenaukio / Lappeenranta Miradore Ltd Established in 2006, spin-off from UPM The story started already in 1995 from a burning
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.9.269
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.9.269
Luento 13: Ympäristömallien tiedonkeruu
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 13: Ympäristömallien tiedonkeruu Luento 13: Ympäristömallien tiedonkeruu 3-D mallien tiedonkeruu Ilmakuvauksen
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 13: Ympäristömallien tiedonkeruu Luento 13: Ympäristömallien tiedonkeruu 3-D mallien tiedonkeruu Ilmakuvauksen
Lapuan myöntämä EU tuki SOLUTION asuinalueille omakoti- tai rivitaloa rakentaville
 Lapuan myöntämä EU tuki SOLUTION asuinalueille omakoti- tai rivitaloa rakentaville Pakollinen liite rakennustyön tarkastusasiakirjaan ja toiseen hakuvaiheeseen / Compulsory supplement the construction
Lapuan myöntämä EU tuki SOLUTION asuinalueille omakoti- tai rivitaloa rakentaville Pakollinen liite rakennustyön tarkastusasiakirjaan ja toiseen hakuvaiheeseen / Compulsory supplement the construction
Secto Design Oy Kauppalantie 12 02700 Kauniainen Finland tel. +358 9 5050598 fax +358 9 5475 2535 info@sectodesign.fi www.sectodesign.
 Secto Design Oy Kauppalantie 12 02700 Kauniainen Finland tel. +358 9 5050598 fax +358 9 5475 2535 info@sectodesign.fi www.sectodesign.fi Secto 4200 pendant natural birch, black or white laminate, walnut
Secto Design Oy Kauppalantie 12 02700 Kauniainen Finland tel. +358 9 5050598 fax +358 9 5475 2535 info@sectodesign.fi www.sectodesign.fi Secto 4200 pendant natural birch, black or white laminate, walnut
Yhtiön nimi: - Luotu: - Puhelin: - Fax: - Päiväys: -
 Positio Laske Kuvaus 1 MAGNA 32-1 N Tuote No.: 98117 Huom.! Tuotteen kuva voi poiketa todellisesta tuotteesta The pump is of the canned rotor type, i.e. pump and motor form an integral unit without shaft
Positio Laske Kuvaus 1 MAGNA 32-1 N Tuote No.: 98117 Huom.! Tuotteen kuva voi poiketa todellisesta tuotteesta The pump is of the canned rotor type, i.e. pump and motor form an integral unit without shaft
S Sähkön jakelu ja markkinat S Electricity Distribution and Markets
 S-18.3153 Sähkön jakelu ja markkinat S-18.3154 Electricity Distribution and Markets Voltage Sag 1) Kolmivaiheinen vastukseton oikosulku tapahtuu 20 kv lähdöllä etäisyydellä 1 km, 3 km, 5 km, 8 km, 10 km
S-18.3153 Sähkön jakelu ja markkinat S-18.3154 Electricity Distribution and Markets Voltage Sag 1) Kolmivaiheinen vastukseton oikosulku tapahtuu 20 kv lähdöllä etäisyydellä 1 km, 3 km, 5 km, 8 km, 10 km
Network to Get Work. Tehtäviä opiskelijoille Assignments for students. www.laurea.fi
 Network to Get Work Tehtäviä opiskelijoille Assignments for students www.laurea.fi Ohje henkilöstölle Instructions for Staff Seuraavassa on esitetty joukko tehtäviä, joista voit valita opiskelijaryhmällesi
Network to Get Work Tehtäviä opiskelijoille Assignments for students www.laurea.fi Ohje henkilöstölle Instructions for Staff Seuraavassa on esitetty joukko tehtäviä, joista voit valita opiskelijaryhmällesi
KÄYTTÖOHJE PEL 1000 / PEL 1000-M
 V1.0 (19.02.2015) 1 (8) KÄYTTÖÖNOTTO Asennus - Lähetin tulisi asentaa mittauskohdan yläpuolelle kondensoitumisongelmien välttämiseksi. - Kanavan ylipaine mitataan siten, että kanavan mittayhde yhdistetään
V1.0 (19.02.2015) 1 (8) KÄYTTÖÖNOTTO Asennus - Lähetin tulisi asentaa mittauskohdan yläpuolelle kondensoitumisongelmien välttämiseksi. - Kanavan ylipaine mitataan siten, että kanavan mittayhde yhdistetään
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Calculation: N117 x 9 x HH141 Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG
SHADOW - Main Result Calculation: N117 x 9 x HH141 Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
Esitystavat 4K ja 8K. Mitä esitystavat 4K ja 8K ovat, milloin tulevat, vai tulevatko ja miksi. Muutama olettamus miksi. Koonnut Pekka Mielityinen 1
 Mitä esitystavat 4K ja 8K ovat, milloin tulevat, vai tulevatko ja miksi. Muutama olettamus miksi. Koonnut Pekka Mielityinen 1 Teräväpiirtotekniikan tarkkuus on 1080 juovaa ja 1920 pistettä juovalla Elämme
Mitä esitystavat 4K ja 8K ovat, milloin tulevat, vai tulevatko ja miksi. Muutama olettamus miksi. Koonnut Pekka Mielityinen 1 Teräväpiirtotekniikan tarkkuus on 1080 juovaa ja 1920 pistettä juovalla Elämme
Operatioanalyysi 2011, Harjoitus 2, viikko 38
 Operatioanalyysi 2011, Harjoitus 2, viikko 38 H2t1, Exercise 1.1. H2t2, Exercise 1.2. H2t3, Exercise 2.3. H2t4, Exercise 2.4. H2t5, Exercise 2.5. (Exercise 1.1.) 1 1.1. Model the following problem mathematically:
Operatioanalyysi 2011, Harjoitus 2, viikko 38 H2t1, Exercise 1.1. H2t2, Exercise 1.2. H2t3, Exercise 2.3. H2t4, Exercise 2.4. H2t5, Exercise 2.5. (Exercise 1.1.) 1 1.1. Model the following problem mathematically:
TM ETRS-TM35FIN-ETRS89 WTG
 VE1 SHADOW - Main Result Calculation: 8 x Nordex N131 x HH145m Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please
VE1 SHADOW - Main Result Calculation: 8 x Nordex N131 x HH145m Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please
Alternative DEA Models
 Mat-2.4142 Alternative DEA Models 19.9.2007 Table of Contents Banker-Charnes-Cooper Model Additive Model Example Data Home assignment BCC Model (Banker-Charnes-Cooper) production frontiers spanned by convex
Mat-2.4142 Alternative DEA Models 19.9.2007 Table of Contents Banker-Charnes-Cooper Model Additive Model Example Data Home assignment BCC Model (Banker-Charnes-Cooper) production frontiers spanned by convex
( ,5 1 1,5 2 km
 Tuulivoimala Rakennukset Asuinrakennus Liikerak. tai Julkinen rak. Lomarakennus Teollinen rakennus Kirkollinen rakennus Varjostus "real case" h/a 1 h/a 8 h/a 20 h/a 4 5 3 1 2 6 7 8 9 10 0 0,5 1 1,5 2 km
Tuulivoimala Rakennukset Asuinrakennus Liikerak. tai Julkinen rak. Lomarakennus Teollinen rakennus Kirkollinen rakennus Varjostus "real case" h/a 1 h/a 8 h/a 20 h/a 4 5 3 1 2 6 7 8 9 10 0 0,5 1 1,5 2 km
Sähköjärjestelmän käyttövarmuus & teknologia Käyttövarmuuspäivä 25.11.2014
 Sähköjärjestelmän käyttövarmuus & teknologia Käyttövarmuuspäivä 25.11.2014 Jarmo Partanen, professori, Lappeenrannan yliopisto jarmo.partanen@lut.fi +358 40 5066 564 Electricity Market, targets Competitive
Sähköjärjestelmän käyttövarmuus & teknologia Käyttövarmuuspäivä 25.11.2014 Jarmo Partanen, professori, Lappeenrannan yliopisto jarmo.partanen@lut.fi +358 40 5066 564 Electricity Market, targets Competitive
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table 22.12.2014 11:33 / 1 Minimum
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table 22.12.2014 11:33 / 1 Minimum
Innovation Platform Thinking Jukka P. Saarinen Mika M. Raunio Nadja Nordling Taina Ketola Anniina Heinikangas Petri Räsänen
 Innovation Platform Thinking 17.6.2015 Jukka P. Saarinen Mika M. Raunio Nadja Nordling Taina Ketola Anniina Heinikangas Petri Räsänen Motivation for platform thinking... Normal project with different phases:
Innovation Platform Thinking 17.6.2015 Jukka P. Saarinen Mika M. Raunio Nadja Nordling Taina Ketola Anniina Heinikangas Petri Räsänen Motivation for platform thinking... Normal project with different phases:
Arkkitehtuuritietoisku. eli mitä aina olet halunnut tietää arkkitehtuureista, muttet ole uskaltanut kysyä
 Arkkitehtuuritietoisku eli mitä aina olet halunnut tietää arkkitehtuureista, muttet ole uskaltanut kysyä Esikysymys Kuinka moni aikoo suunnitella projektityönsä arkkitehtuurin? Onko tämä arkkitehtuuria?
Arkkitehtuuritietoisku eli mitä aina olet halunnut tietää arkkitehtuureista, muttet ole uskaltanut kysyä Esikysymys Kuinka moni aikoo suunnitella projektityönsä arkkitehtuurin? Onko tämä arkkitehtuuria?
Sony 4K more than just a number
 Sony 4K more than just a number Mitä on 4K ja miksi? 4k timelapse 4K (8.3MP) 2160 pixels FHD 1080P (2MP) HD 720P (0.92 MP) PAL (0.4MP) PAL 720 pixels HD 1280 pixels FHD 1920 pixels 4K 3840 pixels Odotukset
Sony 4K more than just a number Mitä on 4K ja miksi? 4k timelapse 4K (8.3MP) 2160 pixels FHD 1080P (2MP) HD 720P (0.92 MP) PAL (0.4MP) PAL 720 pixels HD 1280 pixels FHD 1920 pixels 4K 3840 pixels Odotukset
On instrument costs in decentralized macroeconomic decision making (Helsingin Kauppakorkeakoulun julkaisuja ; D-31)
") On instrument costs in decentralized macroeconomic decision making (Helsingin Kauppakorkeakoulun julkaisuja ; D-31) Juha Kahkonen Click here if your download doesn"t start automatically On instrument costs
On instrument costs in decentralized macroeconomic decision making (Helsingin Kauppakorkeakoulun julkaisuja ; D-31) Juha Kahkonen Click here if your download doesn"t start automatically On instrument costs
,0 Yes ,0 120, ,8
 SHADOW - Main Result Calculation: Alue 2 ( x 9 x HH120) TuuliSaimaa kaavaluonnos Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered
SHADOW - Main Result Calculation: Alue 2 ( x 9 x HH120) TuuliSaimaa kaavaluonnos Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
Capacity utilization
 Mat-2.4142 Seminar on optimization Capacity utilization 12.12.2007 Contents Summary of chapter 14 Related DEA-solver models Illustrative examples Measure of technical capacity utilization Price-based measure
Mat-2.4142 Seminar on optimization Capacity utilization 12.12.2007 Contents Summary of chapter 14 Related DEA-solver models Illustrative examples Measure of technical capacity utilization Price-based measure
Varmista oma paikkasi tulevaisuuden digitaalisilla markkinoilla. IPR-aamiaisseminaari, Ravintola Pörssi, 22.9.2015
 Varmista oma paikkasi tulevaisuuden digitaalisilla markkinoilla IPR-aamiaisseminaari, Ravintola Pörssi, 22.9.2015 Sisältö Teknologiatrendit Patentit teknologiatrendeissä Ohjelmistojen suojaus teknologiatrendeissä
Varmista oma paikkasi tulevaisuuden digitaalisilla markkinoilla IPR-aamiaisseminaari, Ravintola Pörssi, 22.9.2015 Sisältö Teknologiatrendit Patentit teknologiatrendeissä Ohjelmistojen suojaus teknologiatrendeissä
Studioiden vaativaan työympäristöön suunniteltu aktiivikaiutinsarja. Pro Studio 30, 40, 55, 65, 80 ja 100 SW mallit
 Pro Studio sarja Studioiden vaativaan työympäristöön suunniteltu aktiivikaiutinsarja Pro Studio 30, 40, 55, 65, 80 ja 100 SW mallit Pro Studio 30 Pro Studio 30 on erittäin pieni ammatti- ja kotikäyttöön
Pro Studio sarja Studioiden vaativaan työympäristöön suunniteltu aktiivikaiutinsarja Pro Studio 30, 40, 55, 65, 80 ja 100 SW mallit Pro Studio 30 Pro Studio 30 on erittäin pieni ammatti- ja kotikäyttöön
LED nauha säädin + ohjain REVAL BULB 1 kanal 12V langaton 12-24V 96W IP20 (12837)
") LED nauha säädin + ohjain REVAL BULB 1 kanal 12V langaton 12-24V 96W IP20 (12837) tuotekoodi: 12837 merkki: REVAL BULB teho: 96W virranotto: 8A kotelointiluokka: IP20 korkeus: 30mm leveys: 56mm pituus:
LED nauha säädin + ohjain REVAL BULB 1 kanal 12V langaton 12-24V 96W IP20 (12837) tuotekoodi: 12837 merkki: REVAL BULB teho: 96W virranotto: 8A kotelointiluokka: IP20 korkeus: 30mm leveys: 56mm pituus:
Mitat. Tuotekoodi. Materiaalit ja pintakäsittely. lindab kattolaittet. GS23 liitäntälaatikolla H. GS23 yläosalla V
 yläosalla V Tuotekuvaus on ruutukuvioisilla säleillä varustettu alumiinisäleikkö. G23:a käytetään poistoilmalle. Installing a -V diffuser in a plenum box type MB can help to achieve a stable flow of air
yläosalla V Tuotekuvaus on ruutukuvioisilla säleillä varustettu alumiinisäleikkö. G23:a käytetään poistoilmalle. Installing a -V diffuser in a plenum box type MB can help to achieve a stable flow of air
performance DHW coil type exchanger Diverter valve Analogue thermostat control panel Heating pump DHW pump Digital electronic control panel
 ACTIVA HIGH PERFORMANCE STEEL HEATER UNIT HIGH PERFORMANCE STEEL HEATER UNIT ACTIVA PLUS High energy efficiency obtained due to the LASIAN body structural features of high heat exchange surface area and
ACTIVA HIGH PERFORMANCE STEEL HEATER UNIT HIGH PERFORMANCE STEEL HEATER UNIT ACTIVA PLUS High energy efficiency obtained due to the LASIAN body structural features of high heat exchange surface area and
Security server v6 installation requirements
 CSC Security server v6 installation requirements Security server version 6.4-0-201505291153 Pekka Muhonen 8/12/2015 Date Version Description 18.12.2014 0.1 Initial version 10.02.2015 0.2 Major changes
CSC Security server v6 installation requirements Security server version 6.4-0-201505291153 Pekka Muhonen 8/12/2015 Date Version Description 18.12.2014 0.1 Initial version 10.02.2015 0.2 Major changes
SAGA 150. Asennusohjeet. Mittaa oven korkeus. Piirrä seinään oven kiinni -päätyyn seinäkannattimen kohdalle vaakaviiva korkeudelle ovi + 75mm + 20 mm.
 SAGA 150 Asennusohjeet 500 1 2 Mittaa oven korkeus. Piirrä seinään oven kiinni -päätyyn seinäkannattimen kohdalle vaakaviiva korkeudelle ovi + 75mm + 20 mm. 3 Piirrä vesivaa an avulla viiva myös kiskon
SAGA 150 Asennusohjeet 500 1 2 Mittaa oven korkeus. Piirrä seinään oven kiinni -päätyyn seinäkannattimen kohdalle vaakaviiva korkeudelle ovi + 75mm + 20 mm. 3 Piirrä vesivaa an avulla viiva myös kiskon
GreyCAM nettihinnasto 2013
 Hinnaston viimeisin päivitys Päivitetty 22.8.2013 Toimitusehdot Toimitustavat Arvonlisävero Toimitusaika Takuu Maksuehto Hinnaston voimassaolo Hinnaston tuotteet on hinnoiteltu vapaasti varastossamme Helsingissä.
Hinnaston viimeisin päivitys Päivitetty 22.8.2013 Toimitusehdot Toimitustavat Arvonlisävero Toimitusaika Takuu Maksuehto Hinnaston voimassaolo Hinnaston tuotteet on hinnoiteltu vapaasti varastossamme Helsingissä.
TIEKE Verkottaja Service Tools for electronic data interchange utilizers. Heikki Laaksamo
 TIEKE Verkottaja Service Tools for electronic data interchange utilizers Heikki Laaksamo TIEKE Finnish Information Society Development Centre (TIEKE Tietoyhteiskunnan kehittämiskeskus ry) TIEKE is a neutral,
TIEKE Verkottaja Service Tools for electronic data interchange utilizers Heikki Laaksamo TIEKE Finnish Information Society Development Centre (TIEKE Tietoyhteiskunnan kehittämiskeskus ry) TIEKE is a neutral,
WindPRO version joulu 2012 Printed/Page :47 / 1. SHADOW - Main Result
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table WindPRO version 2.8.579
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
DroneKnowledge Towards knowledge based export of small UAS remote sensing technology Kohti tietämysperusteisen UAS kaukokartoitusteknologian vientiä
 DroneKnowledge Towards knowledge based export of small UAS remote sensing technology Kohti tietämysperusteisen UAS kaukokartoitusteknologian vientiä Tekes Challenge Finland Vaihe 1 Projekti, 1.6-14.11.2016
DroneKnowledge Towards knowledge based export of small UAS remote sensing technology Kohti tietämysperusteisen UAS kaukokartoitusteknologian vientiä Tekes Challenge Finland Vaihe 1 Projekti, 1.6-14.11.2016
Security server v6 installation requirements
 CSC Security server v6 installation requirements Security server version 6.x. Version 0.2 Pekka Muhonen 2/10/2015 Date Version Description 18.12.2014 0.1 Initial version 10.02.2015 0.2 Major changes Contents
CSC Security server v6 installation requirements Security server version 6.x. Version 0.2 Pekka Muhonen 2/10/2015 Date Version Description 18.12.2014 0.1 Initial version 10.02.2015 0.2 Major changes Contents
31, 30/12V, 41, SW
 Pro Audio sarja Aktiivikaiuttimien häkellyttävä äänimaailma kotikäyttäjien ulottuville Pro Audio 31, 30/12V, 41, 55 ja 80 SW mallit Pro Audio 31 Pro Audio 31 on erittäin pieni ja kevyt kotikäyttöön soveltuva
Pro Audio sarja Aktiivikaiuttimien häkellyttävä äänimaailma kotikäyttäjien ulottuville Pro Audio 31, 30/12V, 41, 55 ja 80 SW mallit Pro Audio 31 Pro Audio 31 on erittäin pieni ja kevyt kotikäyttöön soveltuva
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry)
") Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Helsinki Metropolitan Area Council
 Helsinki Metropolitan Area Council Current events at YTV The future of YTV and HKL On the initiative of 4 city mayors the Helsinki region negotiation consortiums coordinating group have presented that:
Helsinki Metropolitan Area Council Current events at YTV The future of YTV and HKL On the initiative of 4 city mayors the Helsinki region negotiation consortiums coordinating group have presented that:
C++11 seminaari, kevät Johannes Koskinen
 C++11 seminaari, kevät 2012 Johannes Koskinen Sisältö Mikä onkaan ongelma? Standardidraftin luku 29: Atomiset tyypit Muistimalli Rinnakkaisuus On multicore systems, when a thread writes a value to memory,
C++11 seminaari, kevät 2012 Johannes Koskinen Sisältö Mikä onkaan ongelma? Standardidraftin luku 29: Atomiset tyypit Muistimalli Rinnakkaisuus On multicore systems, when a thread writes a value to memory,
Värin Valvantakameraour
 Värin Valvantakameraour Suomi Sisällysluettelo Sivu Johdanto... 74 Liitännät ja käyttötoiminnot... 75 Asennus... 75 Kameran asento Kuvan tarkkuus Kameran ääni päälle/pois Käyttö ulkona Järjestelmän kaapeli...
Värin Valvantakameraour Suomi Sisällysluettelo Sivu Johdanto... 74 Liitännät ja käyttötoiminnot... 75 Asennus... 75 Kameran asento Kuvan tarkkuus Kameran ääni päälle/pois Käyttö ulkona Järjestelmän kaapeli...
Gap-filling methods for CH 4 data
 Gap-filling methods for CH 4 data Sigrid Dengel University of Helsinki Outline - Ecosystems known for CH 4 emissions; - Why is gap-filling of CH 4 data not as easy and straight forward as CO 2 ; - Gap-filling
Gap-filling methods for CH 4 data Sigrid Dengel University of Helsinki Outline - Ecosystems known for CH 4 emissions; - Why is gap-filling of CH 4 data not as easy and straight forward as CO 2 ; - Gap-filling
Ajettavat luokat: SM: S1 (25 aika-ajon nopeinta)
") SUPERMOTO SM 2013 OULU Lisämääräys ja ohje Oulun Moottorikerho ry ja Oulun Formula K-125ry toivottaa SuperMoto kuljettajat osallistumaan SuperMoto SM 2013 Oulu osakilpailuun. Kilpailu ajetaan karting radalla
SUPERMOTO SM 2013 OULU Lisämääräys ja ohje Oulun Moottorikerho ry ja Oulun Formula K-125ry toivottaa SuperMoto kuljettajat osallistumaan SuperMoto SM 2013 Oulu osakilpailuun. Kilpailu ajetaan karting radalla
Huom. tämä kulma on yhtä suuri kuin ohjauskulman muutos. lasketaan ajoneuvon keskipisteen ympyräkaaren jänteen pituus
 AS-84.327 Paikannus- ja navigointimenetelmät Ratkaisut 2.. a) Kun kuvan ajoneuvon kumpaakin pyörää pyöritetään tasaisella nopeudella, ajoneuvon rata on ympyränkaaren segmentin muotoinen. Hitaammin kulkeva
AS-84.327 Paikannus- ja navigointimenetelmät Ratkaisut 2.. a) Kun kuvan ajoneuvon kumpaakin pyörää pyöritetään tasaisella nopeudella, ajoneuvon rata on ympyränkaaren segmentin muotoinen. Hitaammin kulkeva
Virtually Oy. Laadukas tyynysarja vaativaan käyttöön IMMOBILISAATIO. Arpegia. y-tunnus: puh.
 Arpegia 07/1340 Taille 1 long. 200 cm haut. 18 cm 07/1345 Taille 2 long. 245 cm haut. 18 cm 07/1350 Taille 3 long. 280 cm haut. 18 cm 07/1440 Taille 1 long. 200 cm haut. 10 cm 07/1445 Taille 2 long. 245
Arpegia 07/1340 Taille 1 long. 200 cm haut. 18 cm 07/1345 Taille 2 long. 245 cm haut. 18 cm 07/1350 Taille 3 long. 280 cm haut. 18 cm 07/1440 Taille 1 long. 200 cm haut. 10 cm 07/1445 Taille 2 long. 245
Bounds on non-surjective cellular automata
 Bounds on non-surjective cellular automata Jarkko Kari Pascal Vanier Thomas Zeume University of Turku LIF Marseille Universität Hannover 27 august 2009 J. Kari, P. Vanier, T. Zeume (UTU) Bounds on non-surjective
Bounds on non-surjective cellular automata Jarkko Kari Pascal Vanier Thomas Zeume University of Turku LIF Marseille Universität Hannover 27 august 2009 J. Kari, P. Vanier, T. Zeume (UTU) Bounds on non-surjective
On instrument costs in decentralized macroeconomic decision making (Helsingin Kauppakorkeakoulun julkaisuja ; D-31)
") On instrument costs in decentralized macroeconomic decision making (Helsingin Kauppakorkeakoulun julkaisuja ; D-31) Juha Kahkonen Click here if your download doesn"t start automatically On instrument costs
On instrument costs in decentralized macroeconomic decision making (Helsingin Kauppakorkeakoulun julkaisuja ; D-31) Juha Kahkonen Click here if your download doesn"t start automatically On instrument costs
TM ETRS-TM35FIN-ETRS89 WTG
 SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table 5.11.2013 16:44 / 1 Minimum
SHADOW - Main Result Assumptions for shadow calculations Maximum distance for influence Calculate only when more than 20 % of sun is covered by the blade Please look in WTG table 5.11.2013 16:44 / 1 Minimum
Increase of opioid use in Finland when is there enough key indicator data to state a trend?
 Increase of opioid use in Finland when is there enough key indicator data to state a trend? Martta Forsell, Finnish Focal Point 28.9.2015 Esityksen nimi / Tekijä 1 Martta Forsell Master of Social Sciences
Increase of opioid use in Finland when is there enough key indicator data to state a trend? Martta Forsell, Finnish Focal Point 28.9.2015 Esityksen nimi / Tekijä 1 Martta Forsell Master of Social Sciences
FinFamily PostgreSQL installation ( ) FinFamily PostgreSQL
 FinFamily PostgreSQL") FinFamily PostgreSQL 1 Sisällys / Contents FinFamily PostgreSQL... 1 1. Asenna PostgreSQL tietokanta / Install PostgreSQL database... 3 1.1. PostgreSQL tietokannasta / About the PostgreSQL database...
FinFamily PostgreSQL 1 Sisällys / Contents FinFamily PostgreSQL... 1 1. Asenna PostgreSQL tietokanta / Install PostgreSQL database... 3 1.1. PostgreSQL tietokannasta / About the PostgreSQL database...
TV white spaces taajuuksien käytön tehostamiseen
 TV white spaces taajuuksien käytön tehostamiseen Jukka Henriksson IEEE Life fellow Fairspectrum http://www.fairspectrum.com/ EIS/RISS esitys, Helsinki Sisältöä White space mitä se on? Tilanne TV yhteiskäytössä
TV white spaces taajuuksien käytön tehostamiseen Jukka Henriksson IEEE Life fellow Fairspectrum http://www.fairspectrum.com/ EIS/RISS esitys, Helsinki Sisältöä White space mitä se on? Tilanne TV yhteiskäytössä
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
SwemaFlow 125D ilmanvirtausmittari
 SwemaFlow 125D ilmanvirtausmittari SwemaFlow 125D huppumittari/ilmanvirtausmittari SwemaFlow125D ei tarvitse Swema3000/SwemaAir300 mittaria, mutta mittariliitännän saa lisävarusteena. Käyttökohteet: Teollisuuden
SwemaFlow 125D ilmanvirtausmittari SwemaFlow 125D huppumittari/ilmanvirtausmittari SwemaFlow125D ei tarvitse Swema3000/SwemaAir300 mittaria, mutta mittariliitännän saa lisävarusteena. Käyttökohteet: Teollisuuden
 Digitally signed by Hans Vadbäck DN: cn=hans Vadbäck, o, ou=fcg Suunnittelu ja Tekniikka Oy, email=hans.vadback@fcg.fi, c=fi Date: 2016.12.20 15:45:35 +02'00' Jakob Kjellman Digitally signed by Jakob Kjellman
Digitally signed by Hans Vadbäck DN: cn=hans Vadbäck, o, ou=fcg Suunnittelu ja Tekniikka Oy, email=hans.vadback@fcg.fi, c=fi Date: 2016.12.20 15:45:35 +02'00' Jakob Kjellman Digitally signed by Jakob Kjellman